Disseny, construcció i control d'un corrector del factor...
81
Disseny, construcció i control d'un corrector del factor de potència basat en un rectificador semi-bridgeless Boost. Titulació: Enginyeria Tècnica Industrial en Electrònica Industrial AUTOR: Joan Perelló Capdevila DIRECTOR: Àngel Cid Pastor CO-DIRECTOR: Adrià Marcos Pastor Setembre de 2013
Transcript of Disseny, construcció i control d'un corrector del factor...

Disseny, construcció i control d'un corrector del factor de potència basat en un rectificador semi-bridgeless Boost.
Titulació: Enginyeria Tècnica Industrial en Electrònica Industrial
AUTOR: Joan Perelló Capdevila
DIRECTOR: Àngel Cid Pastor CO-DIRECTOR: Adrià Marcos Pastor
Setembre de 2013

2
Índex 1 Introducció ...................................................................................................... 6
2 Objectiu ........................................................................................................... 6
3 Especificacions ............................................................................................... 7
4 Estat de l’Art .................................................................................................... 8
4.1 Correcció del Factor de Potència ...................................................... 8
4.2 Resistor Lliure de Pèrdues .............................................................. 12
5 Model del Rectificador Semi-bridgeless Boost ............................................. 13
5.1 Equacions d’Estat del Rectificador Boost ........................................ 14
5.2 Model del Rectificador Boost Sense Elements Paràsits ................. 15
6 Síntesis del Resistor Lliure de Pèrdues per Mitjà del Control
en Mode Lliscant ........................................................................................... 20
6.1 Control en Mode Lliscant ................................................................. 20
6.2 Resistor Lliure de Pèrdues en Mode Lliscant .................................. 21
6.3 Superfície de Lliscament ................................................................. 22
6.4 Control Equivalent ........................................................................... 23
6.5 Punt d’Equilibri ................................................................................ 24
6.6 Estabilitat al Voltant del Punt d'Equilibri .......................................... 25
7 Disseny del Rectificador Boost ..................................................................... 26
7.1 Sortida del Rectificador Boost ......................................................... 26
7.2 Entrada del Rectificador Boost ........................................................ 26
7.3 Inductors del Rectificador Boost ...................................................... 27
7.4 Condensador del Rectificador Boost ............................................... 28
7.5 MOSFETs del Rectificador Boost .................................................... 28
7.6 Díodes del Rectificador Boost ......................................................... 29
7.7 Histèresis del Rectificador Boost ..................................................... 29
7.8 Guany del Rectificador Boost .......................................................... 30
8 Simulacions ................................................................................................... 31
8.1 Circuit del rectificador semi-bridgeless Boost ................................. 31
8.2 Etapa de Potència ........................................................................... 32
8.3 Etapa de Control ............................................................................. 41
8.4 Anàlisi numèric de les simulacions .................................................. 46
9 Disseny del Circuit Imprès ............................................................................ 47
9.1 Etapa de Potència ........................................................................... 47
9.2 Etapa de Control ............................................................................. 53
9.3 Circuit del Rectificador Semi-bridgeless Boost ............................... 62

3
10 Resultats Experimentals ............................................................................. 63
10.1 Resultats Experimentals del Rectificador
Semi-bridgeless Boost a 1kW ...................................................... 64
10.2 Millores Experimentals del Rectificador
Semi-bridgeless Boost .................................................................. 67
10.3 Simulacions amb Elements Paràsits del Rectificador
Semi-bridgeless Boost .................................................................. 68
10.4 Mesures de Rendiment del Rectificador
Semi-bridgeless Boost .................................................................. 69
11 Conclusions ................................................................................................ 72
12 Referències ................................................................................................. 73
13 Annex .......................................................................................................... 75
13.1 Model PSIM del Rectificador Semi-bridgeless Boost .................... 75
13.2 Esquemàtic Fase 1 i Fase 2 .......................................................... 76
13.3 Esquemàtic Interconnexió ............................................................. 77
13.4 Esquemàtic Sensat del Corrent ..................................................... 78
13.5 Esquemàtic Lògica de Control ...................................................... 79
13.6 Rectificador Semi-bridgeless Boost .............................................. 80

4
Índex de figures Figura 1. Convertidor Boost PFC tradicional amb el pont de díodes ................. 8
Figura 2. Convertidor Boost PFC ....................................................................... 9
Figura 3. Convertidor bridgeless Boost PFC ................................................... 10
Figura 4. Rectificador semi-bridgeless Boost PFC .......................................... 10
Figura 5. Model del Resistor Lliure de Pèrdues ............................................... 12
Figura 6. Funcionament ideal del rectificador
semi-bridgeless Boost PFC .............................................................. 13
Figura 7. Rectificador Boost amb tensió d’entrada contínua ........................... 14
Figura 8. Punt de sensat del corrent ................................................................ 15
Figura 9. Variables d’estat ............................................................................... 16
Figura 10. Topologia "ON" del rectificador Boost ............................................ 16
Figura 11. Topologia "OFF" del rectificador Boost ........................................... 18
Figura 12. Gràfica Estat-espai ......................................................................... 20
Figura 13. Diagrama de blocs del LFR per lliscament en
un rectificador DC-DC .................................................................... 21
Figura 14. Diagrama de blocs del LFR en mode de lliscament
en un rectificador semi-bridgeless Boost ....................................... 22
Figura 15. Rectificador Boost ........................................................................... 26
Figura 16. Model PSIM complert del rectificador semi-bridgeless Boost ........ 31
Figura 17. Model PSIM rectificador semi-bridgeless Boost ............................. 32
Figura 18. Model PSIM etapa de potencia del rectificador Boost .................... 32
Figura 19. Tensió d’entrada del rectificador Boost .......................................... 33
Figura 20. Corrent d’entrada del rectificador Boost ......................................... 33
Figura 21. Tensió a la sortida del rectificador Boost ........................................ 34
Figura 22. Corrent als inductors ....................................................................... 34
Figura 23. Corrent de pic de l’inductor 1 .......................................................... 35
Figura 24. Corrent màxim i mínim al pic de l’inductor 1 ................................... 35
Figura 25. Període de l’inductor 1 .................................................................... 36
Figura 26. Tensió al condensador del rectificador Boost ................................. 36
Figura 27. Càlcul del valor mig de la tensió al condensador ........................... 37
Figura 28. Tensió màxima i mínima al condensador ....................................... 37
Figura 29. Corrent als MOSFETs .................................................................... 38
Figura 30. Corrent al MOSFET 1 ..................................................................... 39
Figura 31. Corrent als díodes .......................................................................... 30
Figura 32. Corrent al díode 1 ........................................................................... 30
Figura 33. Semiperíode del rectificador ........................................................... 40
Figura 34. Senyal de tensió a l’entrada ........................................................... 40
Figura 35. Model PSIM etapa de control del rectificador Boost ....................... 41
Figura 36. Càlcul superfície lliscament ............................................................ 41
Figura 37. Superfície lliscament ....................................................................... 42
Figura 38. Comparació superfície de lliscament i histèresis ............................ 42
Figura 39. Funcionament del Biestable ........................................................... 43
Figura 40. Entrada portes AND control ....................................................... 44
Figura 41. Senyal de control ....................................................................... 44

5
Figura 42. Entrada portes AND control ....................................................... 45
Figura 43. Senyal de control ....................................................................... 45
Figura 44. Senyals de control i ............................................................... 46
Figura 45. Diagrama de blocs del rectificador semi-bridgeless Boost ............. 47
Figura 46. Convertidor Boost Fase 1 ............................................................... 47
Figura 47. Esquemàtic Fase 1 ......................................................................... 48
Figura 48. Cara bottom PCB Fase 1 ................................................................ 48
Figura 49. Cara top PCB Fase 1 ...................................................................... 49
Figura 50. Cara bottom PCB Fase 2 ................................................................ 49
Figura 51. Cara top PCB Fase 2 ...................................................................... 50
Figura 52. Esquemàtic Interconnexió .............................................................. 50
Figura 53. Sensat tensió d’entrada .................................................................. 51
Figura 54. Cara bottom PCB Sensat del corrent ............................................. 52
Figura 55. Cara top PCB Sensat del corrent ................................................... 52
Figura 56. Esquemàtic Sensat del corrent ....................................................... 53
Figura 57. Obtenció del senyal de la tensió d’entrada ..................................... 54
Figura 58. Generació del guany ....................................................................... 54
Figura 59. Generació de la histèresis .............................................................. 55
Figura 60. Càlcul de la superfície .................................................................... 56
Figura 61. Comparació entre superfície-histèresis i biestable JK .................... 57
Figura 62. Cara bottom PCB Sensat del corrent ............................................. 58
Figura 63. Cara top PCB Sensat del corrent ................................................... 58
Figura 64. Esquemàtic Lògica de control ......................................................... 59
Figura 65. Obtenció del semiperíode actual del rectificador ............................ 60
Figura 66. Esquemàtic del circuit lògic responsable de
la generació dels senyals de control dels MOSFETs ..................... 60
Figura 67. Cara bottom PCB Lògica de control ............................................... 61
Figura 68. Cara top PCB Lògica de control ..................................................... 61
Figura 69. Circuit del rectificador semi-bridgeless Boost ................................. 62
Figura 70. Disipadors del rectificador semi-bridgeless Boost .......................... 62
Figura 71. Rectificador semi-bridgeless Boost en funcionament ..................... 64
Figura 72. Tensió d’entrada del rectificador Boost .......................................... 64
Figura 73. Corrent d’entrada del rectificador Boost ......................................... 65
Figura 74. Corrent als inductors ....................................................................... 65
Figura 75. Tensió a la sortida del rectificador Boost ........................................ 66
Figura 76. Senyal de la tensió a l’entrada i
senyal de la superfície de lliscament .............................................. 66
Figura 77. Senyal de control dels MOSFETs ................................................... 67
Figura 78. Esquemàtic del senyal de la tensió d’entrada
amb condensadors de 33nF ........................................................... 67
Figura 79. Senyal de la tensió d’entrada amb
condensadors de 33nF ................................................................... 68
Figura 80. Corrent real als inductors ................................................................ 69
Figura 81. Rendiment rectificador Boost .......................................................... 71
Figura 82. Factor de potència rectificador Boost ............................................ 71

6
1 Introducció
En aquest treball es presenta un Resistor Lliure de Pèrdues basat en un rectificador semi-bridgeless Boost. El control s’obté mitjançant l’aplicació de la teoria de control en mode lliscant.
El concepte de Resistor Lliure de Pèrdues o Loss-Free Resistor (LFR) va ser introduït per S. Singer, consisteix en un element bi-port el qual es considera què tota la potència consumida a l’entrada es transmet a la sortida (Power Output = Power Input). La propietat fonamental del Resistor Lliure de Pèrdues és que el corrent d’entrada és proporcional a la tensió d’entrada. La implementació de LFR a partir de controls en mode lliscant permet obtenir un bon compromís entre la rapidesa de les respostes transitòries i la baixa distorsió harmònica del corrent d’entrada.
2 Objectiu
L’objectiu d’aquest projecte és sintetitzar un LFR basat en un rectificador semi-bridgeless Boost, utilitzant el control en mode lliscant.
Amb aquesta arquitectura es pot obtenir una millor eficiència a causa de la reducció de les pèrdues de conducció, en comparació al tradicional convertidor Boost amb un pont de díodes a la entrada. Tot i que s’han presentat diferents topologies bridgeless, la topologia semi-bridgeless presenta menys soroll i la seva aplicació pràctica és més convenient. El control en mode lliscant es proposa per aconseguir un comportament LFR i, per tant, la seva aplicació en la correcció de factor de potència és possible.
El projecte estarà format per una primera part analítica en la qual s’obtindrà el model del rectificador semi-bridgeless Boost, es dissenyarà el control en mode lliscant i s’obtindran els punts d’equilibri del sistema.
A continuació es procedirà a realitzar simulacions del LFR treballant en una conversió AC-DC i posteriorment s’aplicarà en una etapa de pre-regulació per la correcció del factor de potència en una conversió AC-DC.
7
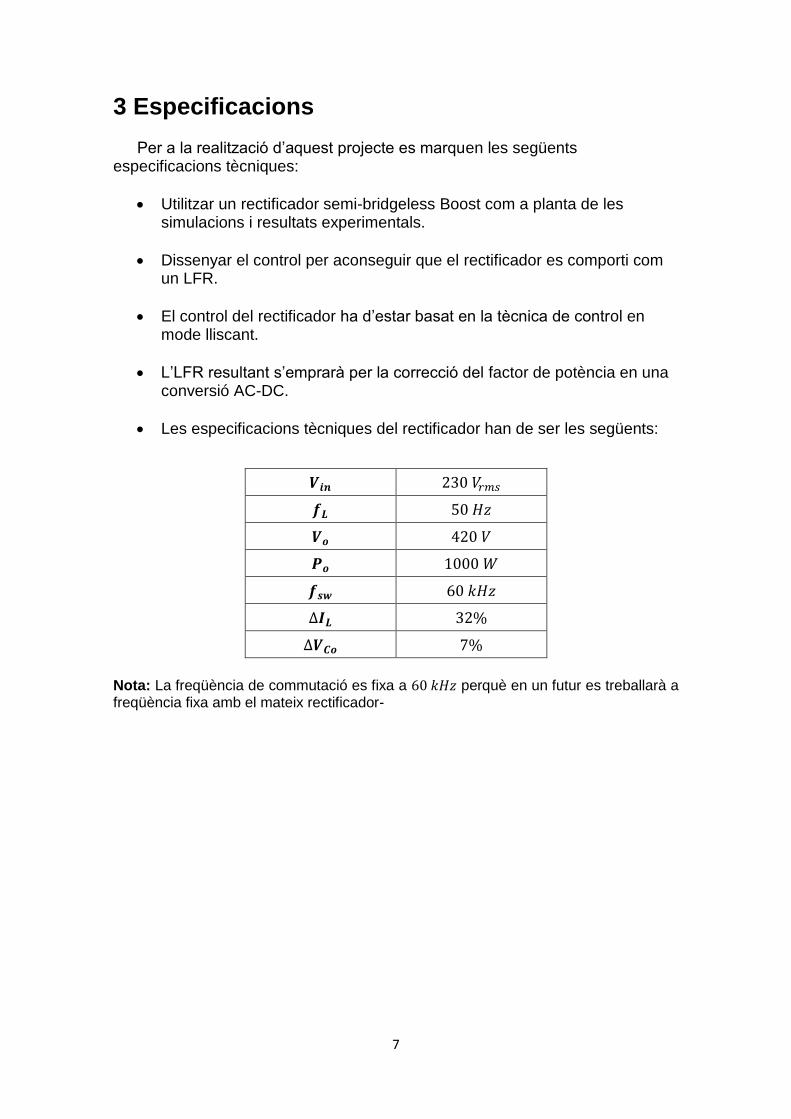
3 Especificacions
Per a la realització d’aquest projecte es marquen les següents especificacions tècniques:
Utilitzar un rectificador semi-bridgeless Boost com a planta de les simulacions i resultats experimentals.
Dissenyar el control per aconseguir que el rectificador es comporti com un LFR.
El control del rectificador ha d’estar basat en la tècnica de control en mode lliscant.
L’LFR resultant s’emprarà per la correcció del factor de potència en una conversió AC-DC.
Les especificacions tècniques del rectificador han de ser les següents:
Nota: La freqüència de commutació es fixa a perquè en un futur es treballarà a freqüència fixa amb el mateix rectificador-

8
4 Estat de l’Art
La correcció del factor de potència (PFC) s'ha convertit en una de les
línies de recerca més actives en el camp del processament d'energia, ja que tots els equips electrònics han de garantir el compliment de les normatives vigents.
El PFC més popular i utilitzat avui en dia és el convertidor Boost connectat a la xarxa elèctrica a traves d'un pont rectificador de díodes.
Figura 1. Convertidor Boost PFC tradicional amb el pont de díodes.
El principal inconvenient de les solucions per a la correcció de factor de potència que necessiten un pont rectificador de díodes a la entrada, és que el pont de díodes és el responsable de la major part de les pèrdues del circuit.
4.1 Correcció del Factor de Potència
La font de tensió d’entrada més utilitzada en equips electrònics és la font de tensió alterna (230 Vrms i 50Hz), en canvi, el tipus de tensió aplicat a les càrregues sol ser de tensió contínua. Per tant una conversió AC-DC és molt freqüent en els equips electrònics de potència, estan presents en ordinadors, televisors, carregadors de bateries, etc. 4.1.1 Mètodes de Correcció del Factor de Potència
En els últims 20 anys s’han dut a terme una gran quantitat de treballs i estudis que han comportat una intensa producció científica. Així doncs són moltes les arquitectures que s’han proposat per aquest fi, cadascuna amb els seus avantatges i inconvenients.

9
4.1.1.1 Arquitectura clàssica
L’arquitectura clàssica dels correctors del factor de potència consisteix en un pont de díodes connectat a un convertidor DC-DC. Un dels convertidors més àmpliament utilitzats per la seva simplicitat i pel seu bon rendiment és el convertidor Boost.
Figura 2. Convertidor Boost PFC.
4.1.1.2 Arquitectura Bridgeless
La característica que dóna nom a aquesta arquitectura és el fet que no disposa d’un pont de díodes a l’entrada per tal de rectificar la tensió i el corrent d’entrada, sinó que s’utilitzen els interruptors controlats per dur a terme la rectificació a la vegada que s’aprofiten per carregar i descarregar l’inductor de l’entrada.
El cas més conegut de PFC sense pont de díodes consisteix en
desplaçar l’inductor a la banda de tensió alterna del pont de díodes i reemplaçar els díodes de la part baixa per interruptors, amb l’objectiu de replicar el convertidor Boost en cada branca. D’aquesta manera, s’aconsegueix reduir el nombre de components necessaris i això comporta reduir costos, volum, les pèrdues de conducció, etc. Tanmateix el seu control resulta més complex i s’ha de tenir especial cura en els llaços de retorn i les masses.
Aquesta solució va sorgir quan es va veure que el pont de díodes del principi de qualsevol circuit PFC clàssic contribuïa en un 2% a les pèrdues a plena càrrega. Si es pot eliminar el pont o bé combinar-lo amb altres funcions, aquestes pèrdues es poden evitar.
Els inconvenients principals que té aquesta arquitectura és la mesura del sensat de la tensió d'entrada, aquesta mesura es millora en l'arquitectura semi-bridgeless Boost.

10
Figura 3. Convertidor bridgeless Boost PFC.
4.1.1.3 Arquitectura Semi-bridgeless
L’arquitectura Semi-bridgeless mostra unes modificacions respecte l’arquitectura anterior, s’incorpora dos díodes de recuperació lenta i un segon inductor. El resultat són dos circuits convertidors Boost DC-DC, un per a cada semi-cicle de la tensió alterna l'entrada.
Figura 4. Rectificador semi-bridgeless Boost PFC.
El rectificador semi-bridgeless Boost té menys pèrdues de conducció en comparació amb el clàssic rectificador Boost amb el pont de díodes, a causa de l’eliminació del díode situat en la trajectòria del flux del corrent.

11
4.1.2 Selecció de Components per a Circuits Correctors del Factor de Potència
El convertidor Boost representa un dels tipus de convertidors més simples, ja que el nombre de components necessaris en el circuit de potència és mínim - un inductor, un interruptor de potència, un díode i un condensador de sortida. Tot i que l’etapa de potència és simple, la selecció dels components no és gens trivial, ja que cal realitzar un gran nombre de decisions crítiques quan es desitja optimitzar el disseny per aconseguir un bon rendiment. Seguint les noves tendències que busquen aconseguir una elevada eficiència, la selecció dels components juga un paper encara més important.
4.1.2.1 Inductor del PFC
L’inductor és molt important per a l’operació del circuit PFC. S’ha de dissenyar preveient la seva saturació i que proporcioni un bon factor de potència. La mida depèn del valor eficaç del corrent que hagi de travessar l’inductor. Les consideracions clau són seleccionar adequadament el material nucli i el gruix de les espires per un inductor concret. Si el rissat pic a pic del corrent és molt gran, això es tradueix en més pèrdues en el nucli. Una altra consideració és seleccionar el tipus de nucli. Els nuclis toroïdals són els més populars perquè són més barats però el nombre de voltes necessàries és més elevat, on sovint la solució és fer que les espires siguin bobinades. Altres tipus de dissenys utilitzen nuclis de ferrita per aconseguir un millor control sobre el flux.
4.1.2.2 Díode del PFC
La selecció del díode juga un paper crucial en l’eficiència d’un convertidor. En el moment que l’interruptor d’un Boost s’activa, el díode està portant corrent. Com que aquest díode és d’alta tensió, típicament sofreix a causa del fenomen de recuperació del corrent invers, fenomen que afegeix pèrdues. Per això és important utilitzar díodes ultraràpids (preferentment amb bones característiques de recuperació) per mitigar aquest problema.
4.1.2.3 Interruptor de potència del PFC
L’elecció de l’interruptor de potència consisteix en una correspondència cost i rendiment. Els recents avenços en la tecnologia MOSFET ha ajudat a moure aquesta balança més ràpidament en una direcció: millorar el rendiment. Amb interruptors MOSFET de 500 V i 600 V, la característica més important per seleccionar el MOSFET és la resistència que presenta en conducció, , el
qual convé que sigui el menor possible per obtenir les mínimes pèrdues possibles sense incrementar les pèrdues de commutació.
La capacitat del drenador-sortidor del MOSFET és una altra característica molt important. Aquesta capacitat s’ha de carregar i descarregar cada període de commutació. Si s’escull un MOSFET amb una capacitat baixa, la pèrdues de commutació es reduiran i en conseqüència s’incrementarà l’eficiència.

12
4.2 Resistor Lliure de Pèrdues
El concepte de Resistor Lliure de Pèrdues o Loss-Free Resistor (LFR) va ser introduït per Sigmunt Singer l’any 1990. Es presenta com una solució per tal d’estabilitzar sistemes inestables mitjançant la introducció de resistències. La introducció de resistències en determinats circuits electrònics comporta grans pèrdues en forma de calor. És per això que Singer proposa la síntesis d’una resistència artificial configurada per un element que presenti un comportament resistiu, però que en comptes de transformar l’energia en calor, transmeti l’energia absorbida al circuit que s’està alimentant.
L’element emmagatzemador d’energia lliure de pèrdues amb una característica resistiva es pot aconseguir per mitjà d’una estructura circuital controlada i un element d’emmagatzematge d’energia de tipus lineal, com per exemple un inductor o un condensador. Segons el control aplicat, es pot aconseguir que l’estructura circuital es comporti com un element resistiu el qual transmet l’energia absorbida a l’element emmagatzemador i en conseqüència les pèrdues en forma de calor s’eliminen.
Singer, Erickson i Madigan entre l’any 1990 i 1992 establiren el model
del LFR com un element bi-port amb una resistència al port d’entrada i una font de potència al port de sortida, de tal manera que tota la potència consumida per la resistència d’entrada és transferida al port de sortida.
Figura 5. Model del Resistor Lliure de Pèrdues.

13
5 Model del Rectificador Semi-bridgeless Boost
El rectificador escollit és el rectificador semi-bridgeless Boost PFC. Es tracta d’un rectificador que es vol fer treballar com un resistor lliure de pèrdues (LFR) i que s’utilitzarà per a la correcció del factor de potència (PFC).
El funcionament ideal del rectificador semi-bridgeless Boost es mostra a continuació:
Figura 6. Funcionament ideal del rectificador semi-bridgeless Boost PFC.
El rectificador semi-bridgeless està configurat per dos convertidors Boost diferents que estan destinats a funcionar durant cada semi-cicle de la línia d'alimentació. Per aquesta raó, els convertidors Boost es controlen de forma
independent per dos senyals de control i , respectivament.
El senyal de control evita el funcionament del convertidor Boost 2 durant el semi-cicle positiu de la tensió d'entrada, mentre que el senyal evita el funcionament del convertidor Boost 1 durant el semi-cicle negatiu.
Quan ens trobem al semi-cicle positiu el corrent circula sempre pel
inductor . Si la senyal de control , tot el corrent circula per el MOSFET
, en canvi, quan la senyal de control , tot el corrent circula pel díode . El díode proporciona un camí de retorn per al corrent cap a la font de tensió d'entrada, de manera que el corrent circula exclusivament a través del
inductor durant el semi-cicle positiu.

14
Per altra banda, quan ens trobem al semi-cicle negatiu el corrent circula
sempre pel inductor . Si la senyal de control , tot el corrent circula per
el MOSFET , en canvi, quan la senyal de control , tot el corrent circula pel díode . El díode proporciona un camí de retorn per al corrent cap a la font de tensió d'entrada, de manera que el corrent circula exclusivament a
través del inductor durant el semi-cicle negatiu.
5.1 Equacions d’Estat del Rectificador Boost
El model del rectificador Boost s’ha obtingut a partir de la suposició que la tensió d’entrada és contínua.
Es pot suposar que la tensió d'entrada és contínua ja que la freqüència de commutació del corrent és molt superior a la freqüència de la tensió d'entrada. Per aquest motiu es pot fer la suposició que la variació de la tensió d'entrada durant un període de commutació del corrent és quasi nul·la.
Figura 7. Rectificador Boost amb tensió d’entrada contínua.
El comportament dinàmic del rectificador es pot descriure mitjançant dues equacions d’estat, una per cada interval de conducció.
(5.1)
(5.2)
on durant l’estat en “ON” i durant l’estat en “OFF”. Les equacions (5.1) i (5.2) es poden combinar en una única equació d’estat bilineal.
(5.3)

15
A partir de l’equació anterior (5.2) es pot expressar l’equació d’estat bilineal.
(5.4) on
(5.5)
5.2 Model del Rectificador Boost Sense Elements Paràsits
Abans de començar amb les equacions s’ha de tenir en compte que existeix una via de retorn del corrent que no podem controlar. Aquesta via alternativa transcorre a través del díode paràsit del MOSFET que està inactiu, és a dir, el MOSFET del rectificador Boost que no està treballant.
Aquest fet no s'ha tingut en compte gràcies a la situació del punt on es realitza el sensat del corrent. S’ha escollit aquest punt (figura 8) per al sensat del corrent perquè per aquesta node passarà tot el corrent del circuit ja sigui en sentit positiu o negatiu.
Figura 8. Punt de sensat del corrent.
El rectificador està format per tres components emmagatzemadors
d’energia: , i . Tot i això s’ha considerat que tan sols dos dels components treballen durant cada mig cicle: el condensador de sortida i un
dels dos inductors . Per tant, el vector d'estat del sistema es defineix com
(5.6)
on indica quin dels dos inductors opera en cada semi-cicle de la tensió d’entrada, es defineix com
{
(5.7)

16
La figura següent mostra el rectificador semi-bridgeless Boost amb totes les variables definides.
Figura 9. Variables d’estat.
A continuació es plantegen les equacions que descriuen la dinàmica de la planta.
Primerament s’ha de definir el vector de les variables d’estat:
[
] (5.8)
S’ha de tenir present
(5.9)
(5.10)
5.2.1 Topologia “ON” del Rectificador Boost
El circuit equivalent durant l’estat en “ON” és el següent:
Figura 10. Topologia "ON" del rectificador Boost.
17
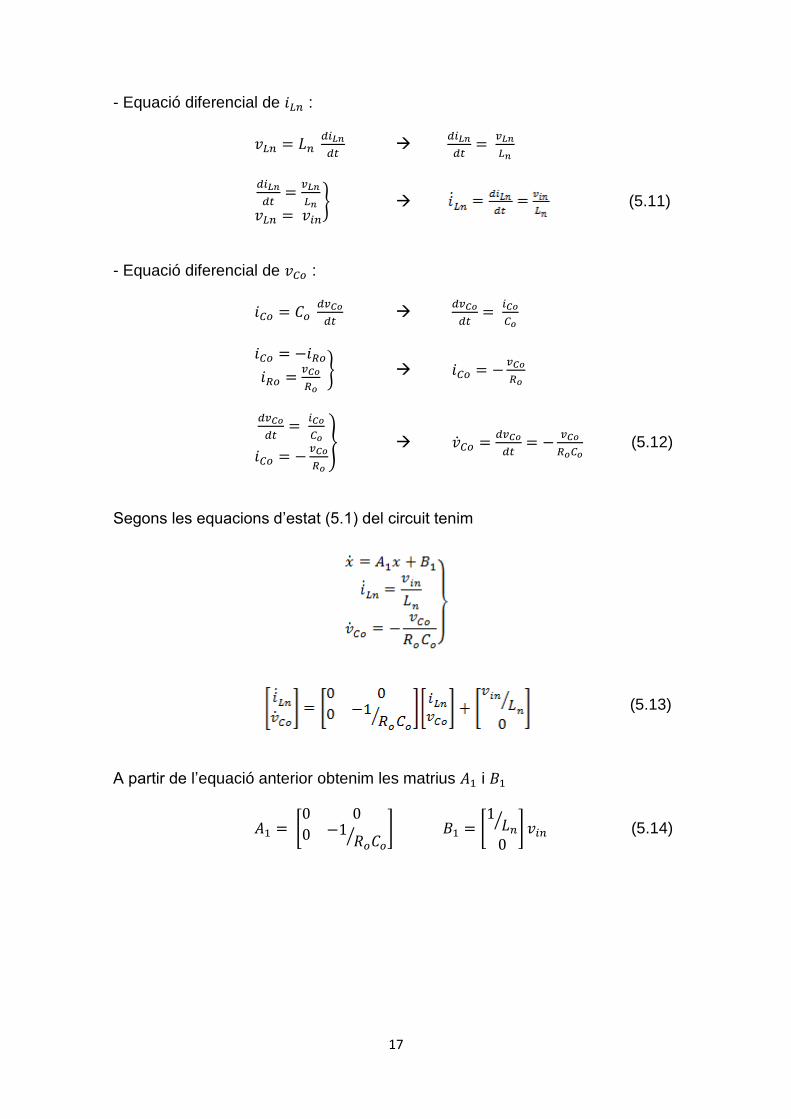
- Equació diferencial de :
} (5.11)
- Equació diferencial de :
}
}
(5.12)
Segons les equacions d’estat (5.1) del circuit tenim
(5.13)
A partir de l’equació anterior obtenim les matrius i
[
⁄ ] [
⁄
] (5.14)

18
5.2.2 Topologia “OFF” del Rectificador Boost El circuit equivalent durant l’estat en “OFF” és el següent:
Figura 11. Topologia "OFF" del rectificador Boost.
- Equació diferencial de :
} _ (5.15)
- Equació diferencial de :
}
}
(5.16)
Segons les equacions d’estat (5.1) del circuit tenim

19
(5.17)
A partir de l’equació anterior obtenim les matrius i
[
⁄
⁄
⁄] [
⁄
] (5.18)
5.2.3 Equacions d’Estat Bilineal del Rectificador Boost
A partir de l’equació d’estat bilineal (5.4) es poden obtenir les dues equacions diferencials del rectificador Boost:
(5.19)
on durant l’estat en “ON” i durant l’estat en “OFF”.

20
6 Síntesis del Resistor Lliure de Pèrdues per Mitjà del Control en Mode Lliscant
6.1 Control en Mode Lliscant
El control per mode de lliscament, en anglès sliding mode control, és un mode particular de funcionament dels sistemes de control amb estructura variable.
És tracta d’una eina molt útil per al disseny de controls, la seva principal virtut és una gran robustesa en front a variacions en els paràmetres del sistema a controlar. Per tant, s’utilitza en moltes aplicacions basades en rectificadors commutats.
Els principis de funcionament del control per mode de lliscament es basen en la ràpida commutació entre diferents estats discrets. Això es fa d’acord amb una llei de commutació basada en els paràmetres del sistema i els del control implementat.
Un cop una dinàmica del sistema es troba en règim de lliscament, l’evolució de la seva trajectòria d’estat, state trajectory, es troba atrapada dins d’una superfície en l’espai d’estat, state-space, la qual es diu superfície de lliscament, sliding surface.
Figura 12. Gràfica Estat-espai.
La conseqüència què una de les variables d’estat entri en règim de lliscament és que l’ordre del sistema es redueixi. De forma general, per un sistema de temps continu aquesta reducció només es pot aconseguir amb un control discontinu, commutant teòricament a una freqüència infinita, cosa que és impossible d’aconseguir a la pràctica.
21
El control en mode de lliscament en temps continu s'utilitza generalment en el disseny de controls per a sistemes que condueixen de manera discontínua. Aquesta funció s'utilitza per generar els senyals que controlen els interruptors de potència dels rectificadors.
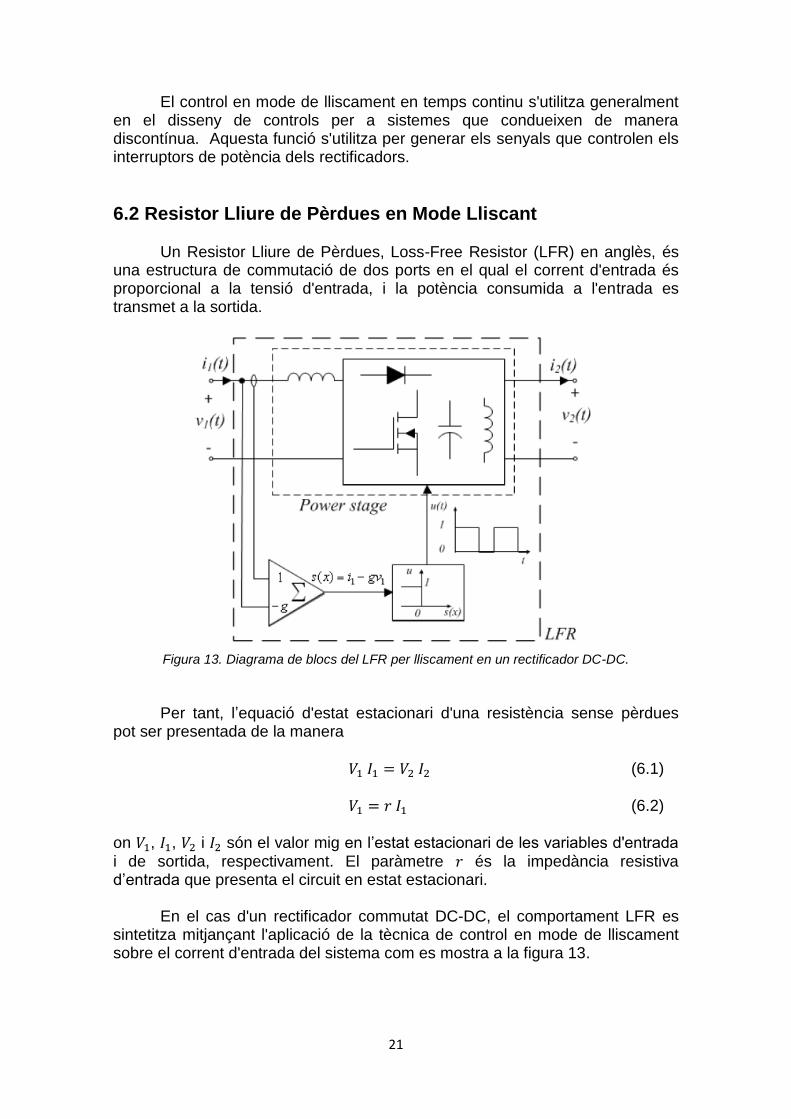
6.2 Resistor Lliure de Pèrdues en Mode Lliscant
Un Resistor Lliure de Pèrdues, Loss-Free Resistor (LFR) en anglès, és una estructura de commutació de dos ports en el qual el corrent d'entrada és proporcional a la tensió d'entrada, i la potència consumida a l'entrada es transmet a la sortida.
Figura 13. Diagrama de blocs del LFR per lliscament en un rectificador DC-DC.
Per tant, l’equació d'estat estacionari d'una resistència sense pèrdues pot ser presentada de la manera
(6.1)
(6.2)
on , , i són el valor mig en l’estat estacionari de les variables d'entrada i de sortida, respectivament. El paràmetre és la impedància resistiva d’entrada que presenta el circuit en estat estacionari.
En el cas d'un rectificador commutat DC-DC, el comportament LFR es sintetitza mitjançant l'aplicació de la tècnica de control en mode de lliscament sobre el corrent d'entrada del sistema com es mostra a la figura 13.
22
6.3 Superfície de Lliscament
La superfície de lliscament és el nucli del control en mode lliscant i la que determinarà el comportament de la variable controlada.
Com que el nostres objectiu és elaborar un LFR, la superfície de
lliscament ha de ser elegida com es mostra a la figura 14.
(6.3) on
⁄ (6.4)
La llei de commutació dóna lloc a una acció de control discontínua com a funció de la superfície de lliscament.
{
(6.5)
Aquesta llei de commutació és la responsable de la inducció d'un règim
de lliscament a la superfície de commutació a una freqüència teòricament infinita. Per tal de solucionar aquest problema s’ha introduït una histèresis per a fer commutar el sistema a una freqüència definida.
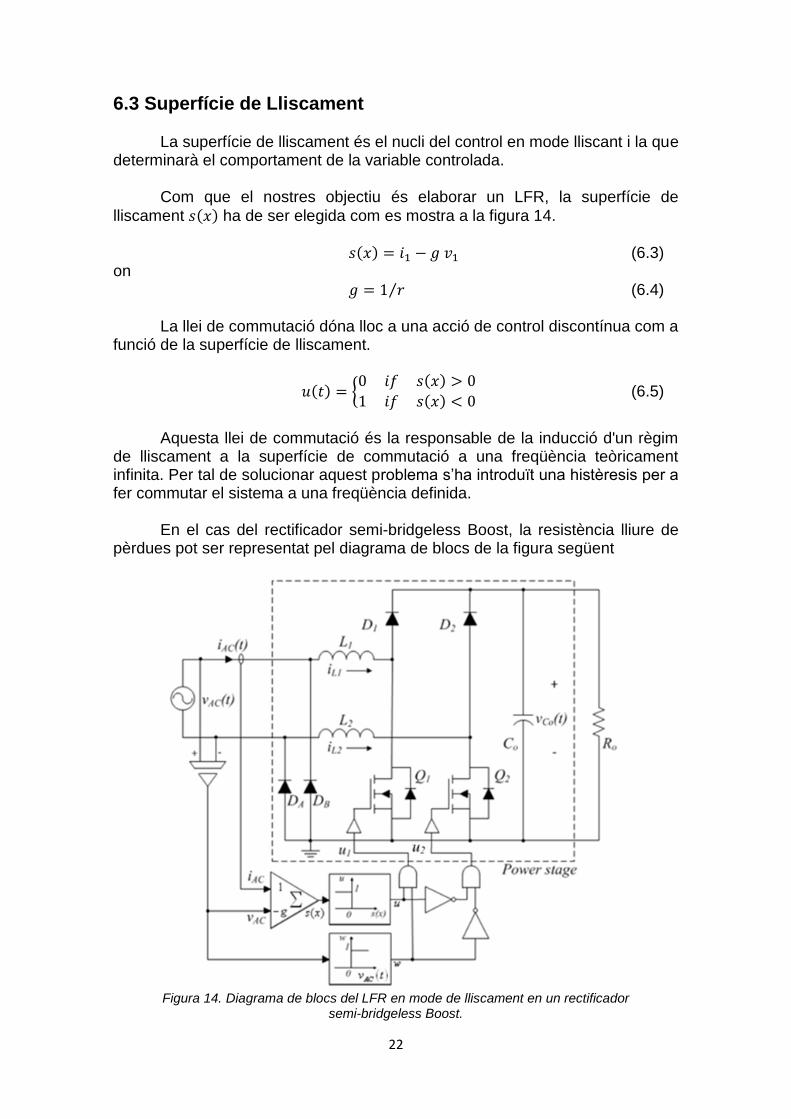
En el cas del rectificador semi-bridgeless Boost, la resistència lliure de pèrdues pot ser representat pel diagrama de blocs de la figura següent
Figura 14. Diagrama de blocs del LFR en mode de lliscament en un rectificador
semi-bridgeless Boost.
23
Es pot observar que, a part del control per lliscament, també hi ha una
lògica de control per al senyal , el qual determina quin dels dos rectificadors
Boost s’activarà en una funció del signe de la tensió d'entrada . En aquest cas, la superfície de lliscament proposada és la següent
(6.6)
Durant el semi-cicle positiu tant com són positius, però durant el semi-cicle negatiu prenen valors negatius. Per tal d'utilitzar una única superfície per controlar el rectificador durant el semi-cicle negatiu, s'ha d'invertit el senyal
de la sortida del comparador de la figura 14. D'aquesta manera la superfície de l'equació 6.6 es pot reescriure de la següent manera
(6.7)
com les variables i sempre són positives, tenim que | | i | |. Finalment, el gradient de la superfície de lliscament és
[
] (6.8)
6.4 Control Equivalent
El següent pas és calcular el control equivalent que produeix la
variable controlada a la superfície de lliscament. Es defineix com
⟨ ⟩
⟨ ⟩ (6.9)
la qual està delimitada entre
(6.10)
Una condició necessària per a l'existència del moviment de lliscament a
la superfície de commutació, és la condició de transversalitat
⟨ ⟩ (6.11) En aquest cas, es pot demostrar que
⟨ ⟩
(6.12)
D’altra banda
⟨ ⟩
(6.13)

24
Per tant
(6.14)
la qual compleix la condició (6.10), perquè en un rectificador Boost la tensió de sortida és sempre major que la tensió d'entrada (excepte en l’engegada) i les dues tensions són positives.
El mode de lliscament imposa que i, per tant en aquest cas, que . La dinàmica del sistema es pot descriure de la següent manera quan es substitueix per i per en (5.18)
(
)
(6.15)
(
)
(
)
Es pot observar que la dinàmica del corrent de l'inductor s'ha convertit en 0 el que indica que l'ordre del sistema s'ha reduït de 2 a 1.
6.5 Punt d’Equilibri
El punt d'equilibri del sistema ( ) es pot deduir del corrent imposat pel mode de lliscament i la dinàmica reduïda (6.15).
(6.16)
(
)
(
)
√ (6.17)
on representa el valor eficaç de la qual és la tensió de la línia que subministra energèticament al sistema. Atès que estem treballant en un aplicació AC-DC, el punt d'equilibri ha de ser referit com el valor eficaç de la tensió d'entrada.
25
6.6 Estabilitat al Voltant del Punt d'Equilibri
La dinàmica reduïda (6.15) s'agafa per dur a terme l'anàlisi de l'estabilitat de la dinàmica de tensió de sortida.
Donat que aquesta dinàmica no és lineal, pot ser linealitzada al voltant del punt d'equilibri si es realitza una aproximació de primer ordre de Taylor sobre la dinàmica de la tensió de sortida
(6.18)
Si definim l'error de la tensió de sortida a partir del seu punt d'equilibri
que és com , la dinàmica d'aquest error serà , de forma
que
(6.19)
la qual és asimptòticament estable.

26
7 Disseny del Rectificador Boost
El disseny del rectificador Boost ve marcat per les especificacions tècniques del projecte que apareixen en el capítol 3.
Figura 15. Rectificador Boost.
7.1 Sortida del Rectificador Boost
Les especificacions tècniques del rectificador ens determinen els següents paràmetres
A partir dels paràmetres anteriors obtenim la resistència a la sortida
(7.1)
7.2 Entrada del Rectificador Boost Les especificacions tècniques ens determinen els següents paràmetres

27
A partir dels paràmetres anteriors obtenim la tensió màxima a l’entrada i la del resistor lliure de pèrdues
√ (7.2)
(
)
(7.3)
7.3 Inductors del Rectificador Boost Les especificacions tècniques ens determinen els següents paràmetres
Els inductors s'han dissenyat per una freqüència fixa de tot i que el control en mode lliscant és de freqüència variable. Primerament es calcularà el corrent de pic dels inductors
√
(7.4)
√ (7.5)
Un cop calculat el corrent de pic obtenim l’arrissat del corrent pic a pic
(7.6)
Finalment calculem el valor dels inductors
( (√
)) (7.7)
El paràmetre indica quin dels dos inductors opera en cada semi-cicle, es defineix com
{
El disseny dels inductors s’ha realitzat a través de la pagina web Magnetics (www.mag-inc.com). Aquesta pagina web ofereix un programa que realitza els càlculs necessaris per a la fabricació de l’inductor.

28
7.4 Condensador del Rectificador Boost Les especificacions tècniques ens determinen l’arrissat de la tensió de sortida
A partir de l’arrissat de tensió es calcula la tensió pic a pic al condensador
(7.8)
Seguidament calculem el valor del condensador
(7.9)
El valor del condensador s’ha aproximat a .
Per al rectificador semi-bridgeless Boost s’ha escollit dos condensadors
de capacitat en comptes d’un sol condensador de .
El model seleccionat ha estat el B43501A6157M de la companyia EPCOS, les especificacions tècniques del condensador són les següents:
7.5 MOSFETs del Rectificador Boost
A continuació es calcula el corrent eficaç que circularà per cadascun dels MOSFETs
√
√
(7.10)

29
Els MOSFETs escollits per al rectificador semi-bridgeless Boost han estat: el model IPW60R041C6 i el model IPW60R160C6 de la companyia INFINEON, les especificacions tècniques dels MOSFETs són les següents:
7.6 Díodes del Rectificador Boost Realitzem el càlcul del corrent que circularà per cadascun dels díodes
(7.11)
Els díodes escollits per al rectificador semi-bridgeless Boost han estat: el model IDH16S60C i el model IDH10SG60C de la companyia INFINEON, les especificacions tècniques dels díodes són les següents:
7.7 Histèresis del Rectificador Boost Es calcula el valor d’histèresis del rectificador Boost
( )
(7.12)
Tot i que el disseny de la bobina s'ha realitzat per treballar a una
freqüència fixa de 60 kHz, el control en mode lliscant provoca que la freqüència
de commutació sigui variable. Per tal de mantenir una freqüència fixa, s'ha
escollit el valor d’histèresi constant de 0,984 V per a poder implementar el
control en mode lliscant tradicional.

30
7.8 Guany del Rectificador Boost Per últim calculem el guany del rectificador Boost
(7.13)

31
8 Simulacions
En aquest apartat es pretén simular el comportament del rectificador semi-bridgeless Boost per tal de visualitzar les diferents de senyals de corrent i tensió. El programa de simulació de circuits utilitzat ha estat el PSIM.
8.1 Circuit del rectificador semi-bridgeless Boost
A continuació és mostra el model PSIM complet del rectificador semi-bridgeless Boost.
Figura 16. Model PSIM complert del rectificador semi-bridgeless Boost.
32
8.2 Etapa de Potència
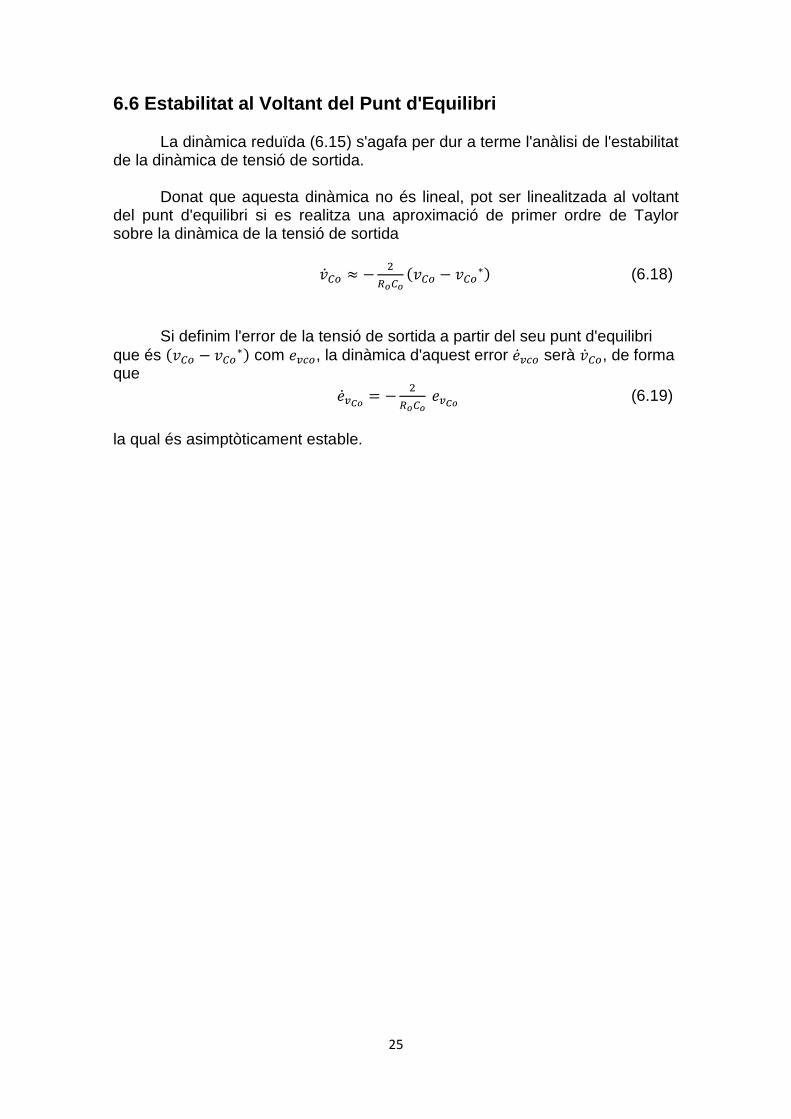
El model PSIM utilitzat del rectificador semi-bridgeless Boost PFC ha estat el següent:
Figura 17. Model PSIM rectificador semi-bridgeless Boost.
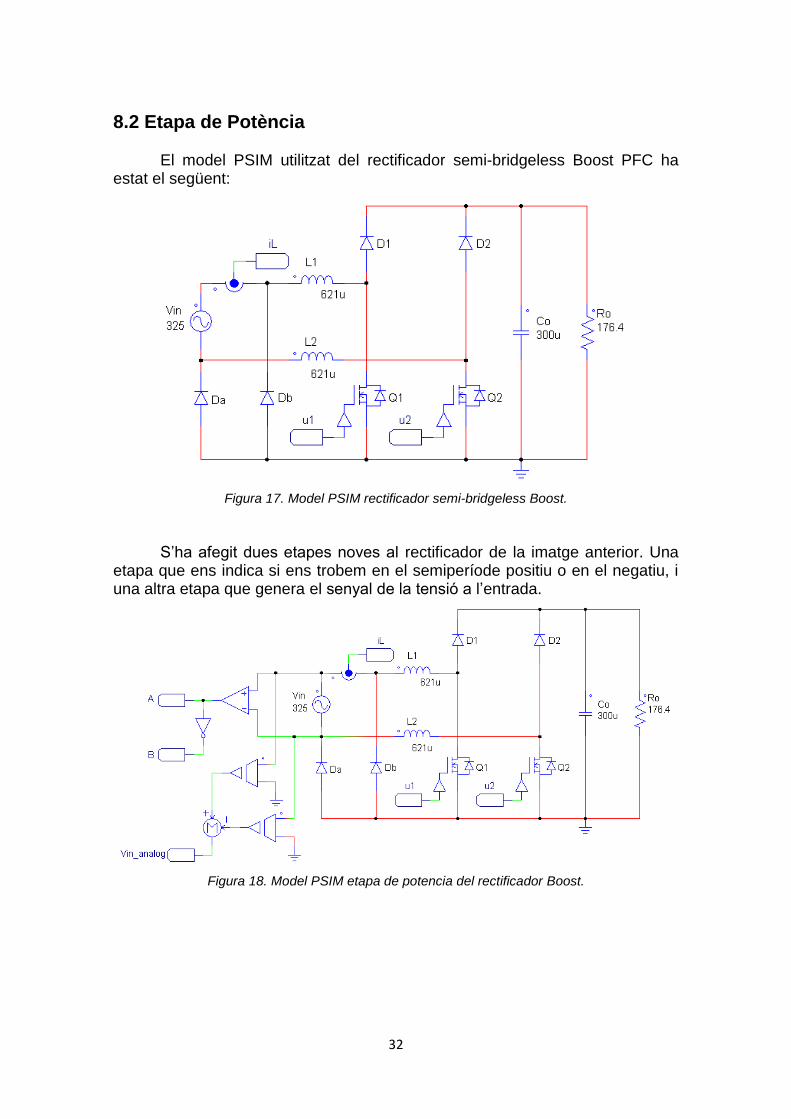
S’ha afegit dues etapes noves al rectificador de la imatge anterior. Una etapa que ens indica si ens trobem en el semiperíode positiu o en el negatiu, i una altra etapa que genera el senyal de la tensió a l’entrada.
Figura 18. Model PSIM etapa de potencia del rectificador Boost.
33
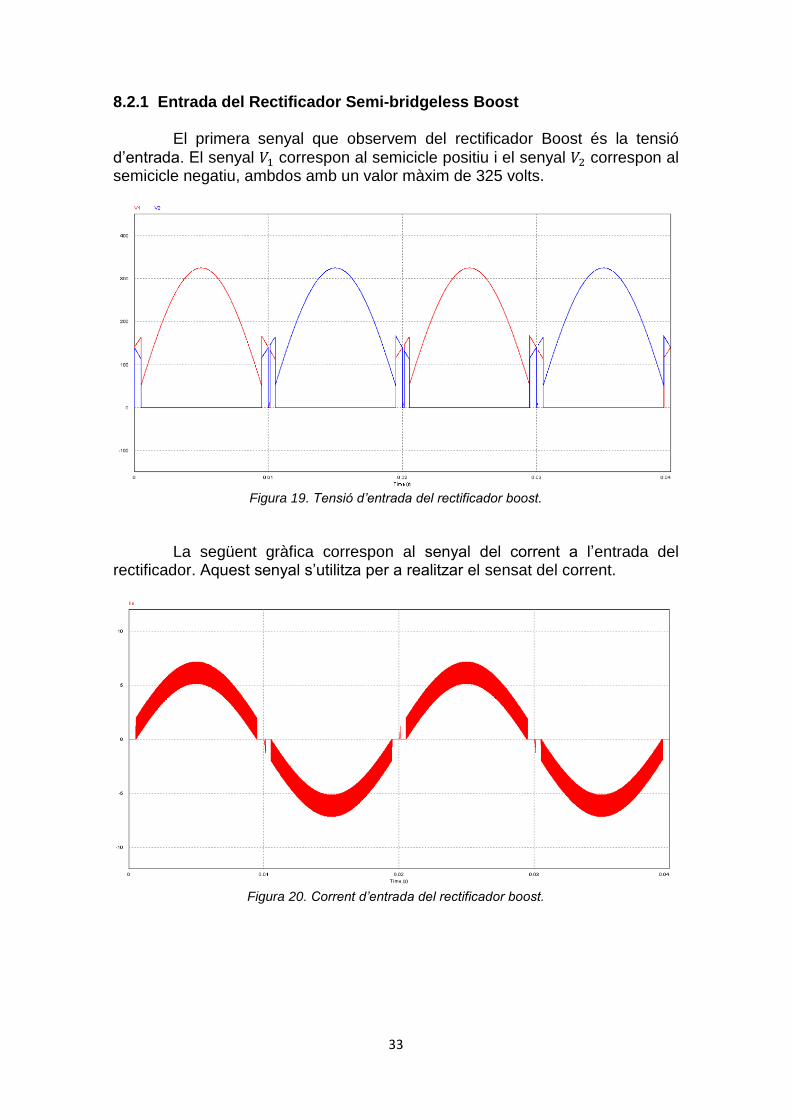
8.2.1 Entrada del Rectificador Semi-bridgeless Boost El primera senyal que observem del rectificador Boost és la tensió
d’entrada. El senyal correspon al semicicle positiu i el senyal correspon al semicicle negatiu, ambdos amb un valor màxim de 325 volts.
Figura 19. Tensió d’entrada del rectificador boost.
La següent gràfica correspon al senyal del corrent a l’entrada del rectificador. Aquest senyal s’utilitza per a realitzar el sensat del corrent.
Figura 20. Corrent d’entrada del rectificador boost.

34
8.2.2 Sortida del Rectificador Semi-bridgeless Boost El senyal de la tensió que s’obté a la sortida del rectificador es mostra en la següent gràfica. Es pot observar com la tensió oscil·la correctament al voltant de 420 volts.
Figura 21. Tensió a la sortida del rectificador boost.
8.2.3 Inductors del Rectificador Semi-bridgeless Boost
El corrent que circula per cada inductor es mostra en la següent gràfica.
El senyal correspon al semicicle positiu i el senyal correspon al semicicle negatiu.
Figura 22. Corrent als inductors.

35
A través del programa de simulació PSIM s’ha calculat el corrent de pic dels inductors.
Figura 23. Corrent de pic del inductor 1.
Per calcular l’arrissat del corrent pic a pic s’ha mesurat el corrent màxim i mínim al pic.
Figura 24. Corrent màxim i mínim al pic de l’ inductor 1.

36
Per últim s’ha calculat la freqüència de commutació del rectificador.
Figura 25. Període de l’inductor 1.
8.2.4 Condensador del Rectificador Semi-bridgeless Boost El senyal de tensió que s’obté al condensador és el mateix que el senyal de sortida del rectificador.
Figura 26. Tensió al condensador del rectificador boost.

37
A través del programa PSIM s’ha calculat la tensió que s’obté al condensador.
Figura 27. Càlcul del valor mig de la tensió al condensador.
Per calcular l’arrissat de la tensió s’ha mesurat la tensió màxima i mínima al condensador.
Figura 28. Tensió màxima i mínima al condensador.

38
8.2.5 MOSFETs del Rectificador Semi-bridgeless Boost
La gràfica següent mostra el senyal del corrent que circula per cadascun dels MOSFETs. El senyal correspon al semicicle positiu i el senyal
correspon al semicicle negatiu.
Figura 29. Corrent als MOSFETs.
A través del programa PSIM s’ha calculat el corrent que circula per cada MOSFET.
Figura 30. Corrent al MOSFET 1.

39
8.2.6 Díodes del Rectificador Semi-bridgeless Boost
El senyal del corrent que circula pels diodes i es mostra a la
grafica següent. El senyal correspon al semicicle positiu i el senyal correspon al semicicle negatiu.
Figura 31. Corrent als díodes.
A través del programa PSIM s’ha calculat el corrent que circula per cada díode.
Figura 32. Corrent al díode 1.

40
8.2.7 Semiperíode del Rectificador
A travès d’un comparador obtenim el següent senyal que ens indica a
quin semiperiode ens trobem. El senyal correspon al semicicle positiu i el
senyal correspon al semicicle negatiu.
Figura 33. Semiperíode del rectificador.
8.2.8 Senyal de la Tensió a la Entrada Realitzant una simple operació matemàtica obtenim el senyal de tensió que s’aplica a l’entrada.
Figura 34. Senyal de tensió a l’entrada.
41
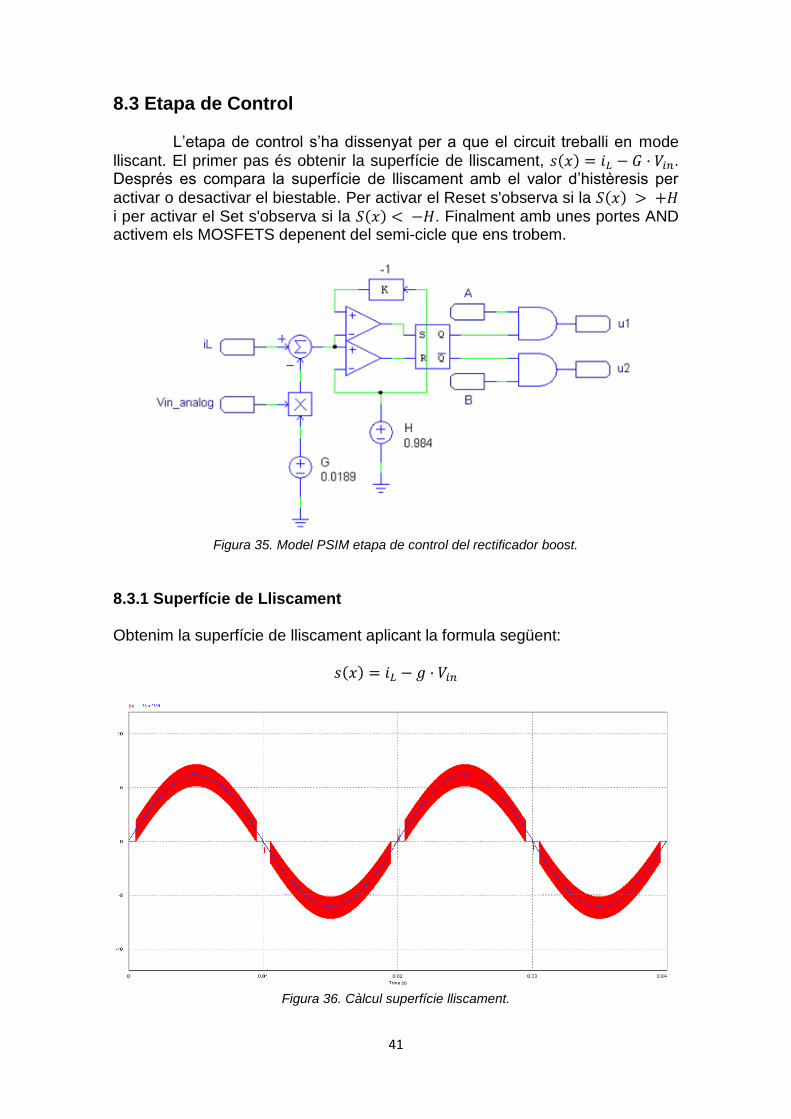
8.3 Etapa de Control L’etapa de control s’ha dissenyat per a que el circuit treballi en mode
lliscant. El primer pas és obtenir la superfície de lliscament, . Després es compara la superfície de lliscament amb el valor d’histèresis per
activar o desactivar el biestable. Per activar el Reset s'observa si la i per activar el Set s'observa si la . Finalment amb unes portes AND activem els MOSFETS depenent del semi-cicle que ens trobem.
Figura 35. Model PSIM etapa de control del rectificador boost.
8.3.1 Superfície de Lliscament Obtenim la superfície de lliscament aplicant la formula següent:
Figura 36. Càlcul superfície lliscament.
42
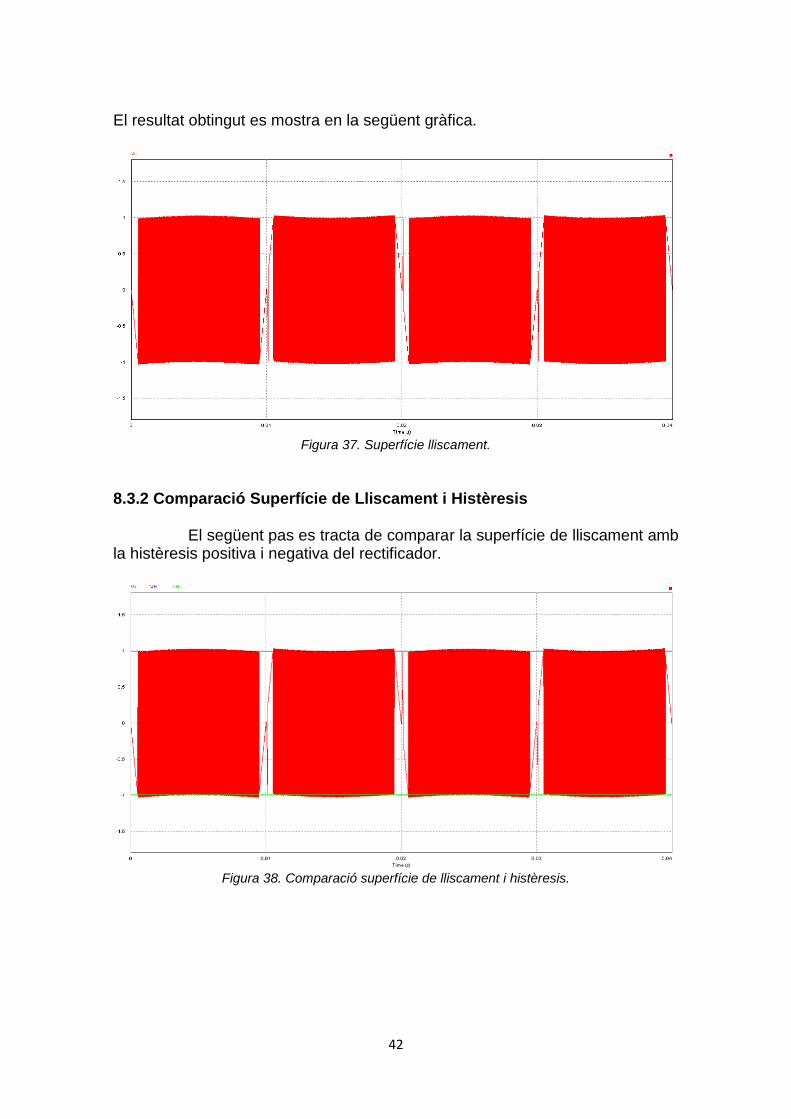
El resultat obtingut es mostra en la següent gràfica.
Figura 37. Superfície lliscament.
8.3.2 Comparació Superfície de Lliscament i Histèresis El següent pas es tracta de comparar la superfície de lliscament amb la histèresis positiva i negativa del rectificador.
Figura 38. Comparació superfície de lliscament i histèresis.

43
8.3.3 Funcionament del Biestable Les següents gràfiques es mostren ampliades per tal de comprendre el correcte funcionament del circuit.
Figura 39. Funcionament del Biestable.
Quan la superfície és superior a la histèresis positiva s’activa el biestable (set) i quan la superfície és inferior a la histèresis negativa es desactiva el biestable (reset).
El senyal s’activa amb l’activació del senyal i es desactiva amb
l’activació del senyal del biestable.
Com es pot deduir, el senyal funciona exactament a la inversa del senyal anterior ( ).

44
8.3.4 Portes AND
Si ens fixem en la porta AND que envia el senyal de control , observem que el senyal varia en funció del biestable i el senyal esta
sempre activa perquè ens trobem al semicicle positiu.
Figura 40. Entrada portes AND control .
Per tant el senyal de control serà el següent:
Figura 41. Senyal de control .
45
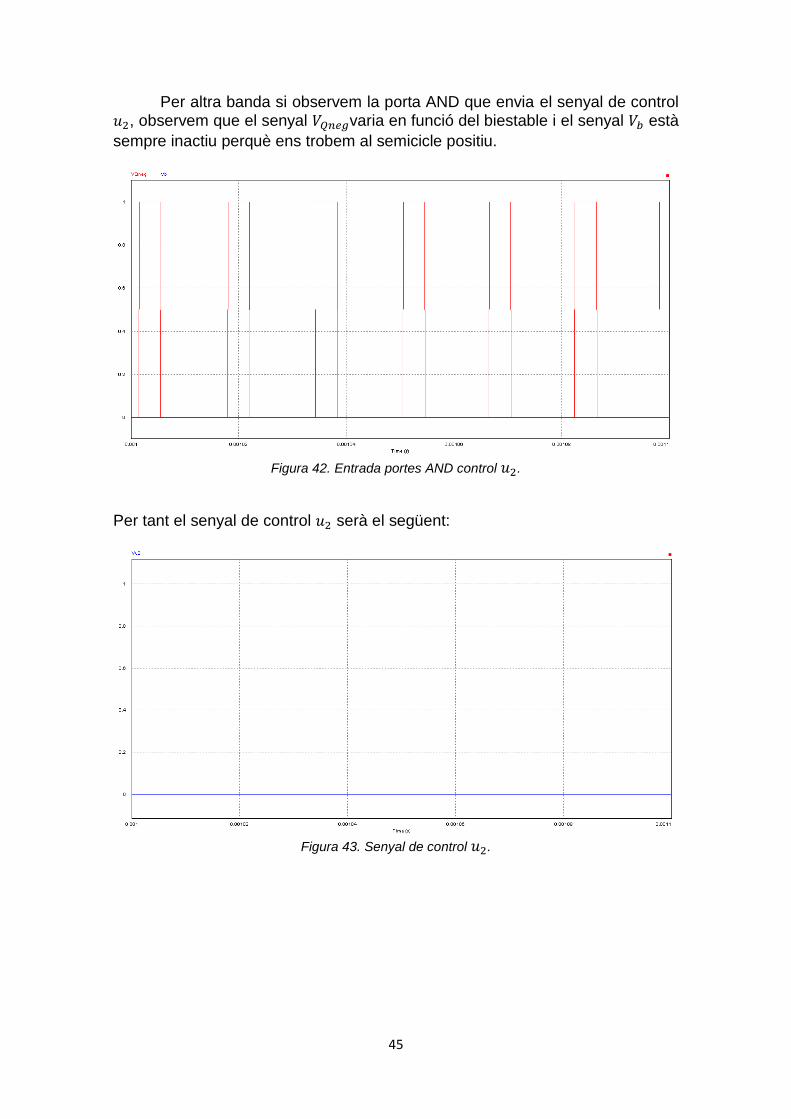
Per altra banda si observem la porta AND que envia el senyal de control , observem que el senyal varia en funció del biestable i el senyal està
sempre inactiu perquè ens trobem al semicicle positiu.
Figura 42. Entrada portes AND control .
Per tant el senyal de control serà el següent:
Figura 43. Senyal de control .

46
A la gràfica següent es mostra els senyals de control i sense ampliar a nivell temporal.
Figura 44. Senyals de control i .
8.4 Anàlisi numèric de les simulacions Un cop realitzades les simulacions del rectificador, es comparen els resultats obtinguts amb els resultats calculats al capítol anterior.
Senyal Valor càlculs
teòrics Valor
simulacions
Inductors
32% 32,79%
60kHz 58,82kHz
6,15 A 6,16 A
1,97 A 2,02 A
Condensador 7% 6,1%
29,4 V 25,5 V
MOSFETs 2,55 Arms 2,57 Arms
Díodes 2,38 A 2,37 A
Observant la taula anterior es pot veure que els valors calculats coincideixen amb els valor obtinguts a les simulacions. Tan sols es pot observar una diferència en els valors del condensador. Aquesta diferència es deu a que el valor del condensador calculat
havia de ser de i s’ha aproximat a . Per tant, a l’augmentar la capacitat del condensador s’ha disminuït l’arrissat de la tensió de sortida.
47
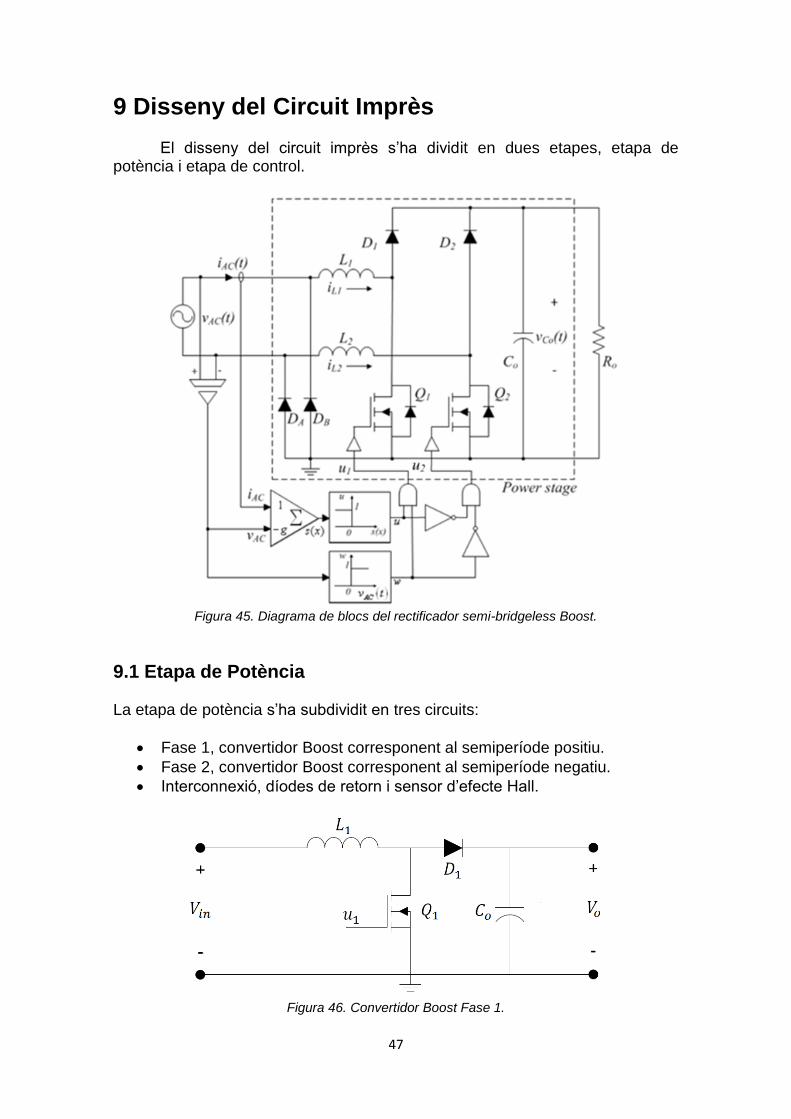
9 Disseny del Circuit Imprès
El disseny del circuit imprès s’ha dividit en dues etapes, etapa de potència i etapa de control.
Figura 45. Diagrama de blocs del rectificador semi-bridgeless Boost.
9.1 Etapa de Potència La etapa de potència s’ha subdividit en tres circuits:
Fase 1, convertidor Boost corresponent al semiperíode positiu.
Fase 2, convertidor Boost corresponent al semiperíode negatiu.
Interconnexió, díodes de retorn i sensor d’efecte Hall.
Figura 46. Convertidor Boost Fase 1.

48
9.1.1 Fase 1
A continuació es mostra l’esquemàtic corresponent a la Fase 1 del rectificador semi-bridgeless Boost.
Figura 47. Esquemàtic Fase 1.
El dispositiu elegit per al control del MOSFET ha estat el driver MCP1407-E/P. A partir de l’esquemàtic anterior s’ha realitzat el disseny del circuit imprès.
Figura 48. Cara bottom PCB Fase 1.

49
Figura 48. Cara top PCB Fase 1.
9.1.2 Fase 2
L’esquemàtic corresponent a la Fase 2 del rectificador Boost és exactament igual a l’esquemàtic de la Fase 1 (Figura 49). El disseny del circuit imprès de la Fase 2 es mostra a continuació.
Figura 50. Cara bottom PCB Fase 2.

50
Figura 51. Cara top PCB Fase 2.
9.1.3 Interconnexió
L’últim esquemàtic de l’etapa de potència correspon a la interconnexió entre la Fase 1 i la Fase 2.
Figura 52. Esquemàtic Interconnexió.

51
Els díodes de retorn ( i ) seleccionats han estat el model STTH6004W de la companyia STMICROELECTRONICS, les especificacions tècniques del díode són les següents:
S’ha escollit el díode STTH6004W perquè ha estat el díode disponible en el mercat que tenia menys caiguda de tensió en directa i que complia les especificacions de tensió inversa i de corrent. Cal destacar que els díodes de
retorn ( i ) escollits no són de com els MOSFETs ( i ) i els díodes ( i ), això es degut a que tant sols han de suportar els de la tensió d’entrada.
Per a realitzar el sensat del corrent s’ha utilitzat el sensor d’efecte Hall LEM LA 25-NP. Com que , la configuració escollida del dispositiu
ha estat la següent:
Amb la configuració anterior seleccionada tenim que per cada que entra al sensor, obtenim a la sortida , per tant, .
A banda del sensat del corrent, també s’ha sensat la tensió d’entrada a través d’un divisor de tensió. Una part del divisor de tensió està situada a l’etapa de potencia i l’altra part a l’etapa de control.
Figura 53. Sensat tensió d’entrada.
El guany del divisor de tensió anterior es mostra a continuació:
(9.1)
52
Per tant quan a la entrada tinguem la tensió màxima de , el node tindrà el valor de .
El circuit imprès corresponent al sensat de corrent és el següent:
Figura 54. Cara bottom PCB Sensat del corrent
. Figura 55. Cara top PCB Sensat del corrent

53
9.2 Etapa de Control L’etapa de control s’ha subdividit en dos circuits:
Control de corrent en mode lliscant.
Lògica de control.
9.2.1 Control de Corrent en Mode Lliscant A continuació es mostra l’esquemàtic corresponent al sensat del corrent.
En aquesta part del rectificador es realitzen vàries operacions relacionades amb el control en mode lliscant:
Obtenció del senyal de la tensió d’entrada.
Generació del guany i la histèresi.
Càlcul de la superfície.
Comparació entre la superfície i la histèresis.
Figura 56. Esquemàtic Sensat del corrent.
54
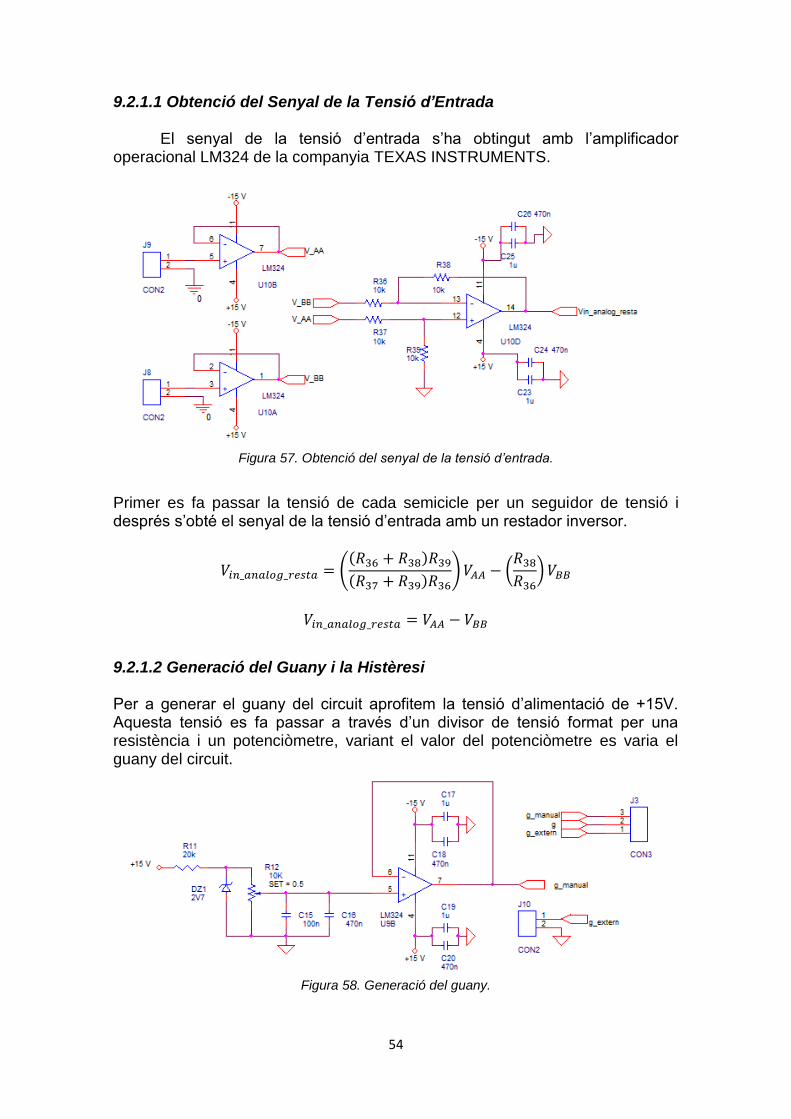
9.2.1.1 Obtenció del Senyal de la Tensió d’Entrada
El senyal de la tensió d’entrada s’ha obtingut amb l’amplificador operacional LM324 de la companyia TEXAS INSTRUMENTS.
Figura 57. Obtenció del senyal de la tensió d’entrada.
Primer es fa passar la tensió de cada semicicle per un seguidor de tensió i després s’obté el senyal de la tensió d’entrada amb un restador inversor.
(
) (
)
9.2.1.2 Generació del Guany i la Histèresi Per a generar el guany del circuit aprofitem la tensió d’alimentació de +15V. Aquesta tensió es fa passar a través d’un divisor de tensió format per una resistència i un potenciòmetre, variant el valor del potenciòmetre es varia el guany del circuit.
Figura 58. Generació del guany.

55
Per tal de delimitar la tensió s’ha afegit un diode zener de , per tant,
el valor del guany pot ajustar-se entre i .
D’altra banda, s’ha incorporat un connector (J10) i un jumper (J3) per a poder introduir el guany del circuit desde una font d’alimentació externa.
La part encarregada de generar la histèresis del circuit és gairebé igual a l’anterior.
Figura 59. Generació de la histèresis.
A diferència de la generació del guany, s’ha afegit un amplificador inversor per tal de tenir la histèresis positiva i negativa.
9.2.1.3 Càlcul de la Superfície
Un cop obtingut el senyal de la tensió d’entrada i el guany, el següent pas és calcular la superfície de lliscament.
Per al càlcul de la superfície s’ha utilitzat el multiplicador AD633ANZ de la companyia ANALOG DEVICES i l’amplificador operacional LF347N de la companyia STMICROELECTRONICS.

56
Figura 60. Càlcul de la superfície.
El càlcul de la superfície s’ha realitzat en vàries etapes:
1. Multiplicació del senyal d’entrada pel guany. El multiplicador AD633ANZ extreu el resultat de la multiplicació dividit entre 10.
2. Amplificació de la multiplicació. Un cop realitzada la multiplicació s’amplifica per 10 el resultat obtingut per tal d’obtenir el valor real de la multiplicació.
(
)
3. Sensat del corrent. Per a realitzar el sensat del corrent utilitzem una resistència de 200 Ohms connectada a la sortida del sensor d'efecte hall. En passar el corrent per aquesta resistència genera una tensió que s’utilitza per al càlcul de la superfície.

57
Quan el valor del corrent de sensat és el màxim, ,
tenim que:
4. Amplificació del sensat de corrent.
Seguidament amplifiquem la tensió obtinguda del sensat del corrent.
(
)
5. Restador inversor. Finalment es realitza el càlcul de la superfície amb un amplificador operacional.
(
) (
)
9.2.1.4 Comparació entre la Superfície i la Histèresis
A continuació la superfície de lliscament es compara amb la histèresis generada. El resultat de la comparació s’utilitza per activar i desactivar el biestable.
S’ha utilitzat el comparador LM319N de la companyia STMICROELECTRONICS i el biestable MC14027BCPG de la companyia ON SEMICONDUCTOR.
Figura 61. Comparació entre superfície-histèresis i biestable JK.
58
9.2.1.5 Circuit Imprès Control de Corrent en Mode Lliscant El circuit imprès corresponent a la part analògica és el següent:
Figura 62. Cara bottom PCB Sensat del corrent.
Figura 63. Cara top PCB Sensat del corrent.

59
9.2.2 Lògica de Control
Per últim es mostra l’esquemàtic corresponent a la lògica de control de la etapa de control.
En aquesta part del rectificador es realitzen vàries operacions relacionades amb la generació del senyal de control dels MOSFETs:
Obtenció del semiperíode actual del rectificador.
Generació dels senyals de control dels MOSFETs.
Figura 64. Esquemàtic Lògica de control.
9.2.2.1 Obtenció del Semiperíode Actual del Rectificador
Per a poder realitzar el control en mode de lliscant, es necessita saber en tot moment a quin semiperíode ens trobem, si en el semiperíode positiu o negatiu.
Per tal de saber a quin semiperíode ens trobem, es comparen els dos senyals d’entrada. El senyal obtingut a la comparació es fa passar per una porta inversora (NOT) per tal de tenir un dels dos senyal actiu en cada moment.

60
S’ha utilitzat el comparador LM319N de la companyia STMICROELECTRONICS i l’inversor CD4007UBE de la companyia TEXAS INSTRUMENTS.
Figura 65. Obtenció del semiperíode actual del rectificador.
9.2.2.2 Generació dels Senyals de Control dels MOSFETs
Per últim es genera el senyal de control del MOSFET i a partir dels senyals obtinguts a l’apartat anterior i els senyals obtinguts del biestable JK, de la placa de control de corrent en mode lliscant.
Per obtenir els senyals de control s’ha utilitzat el circuit integrat CD4081BE de la companyia TEXAS INSTRUMENTS.
Figura 66. Esquemàtic del circuit lògic responsable de la generació dels senyals de control dels
MOSFETs.
61
9.2.2.3 Circuit Imprès Lògica de Control
Figura 67. Cara bottom PCB Lògica de control.
Figura 68. Cara top PCB Lògica de control.
62
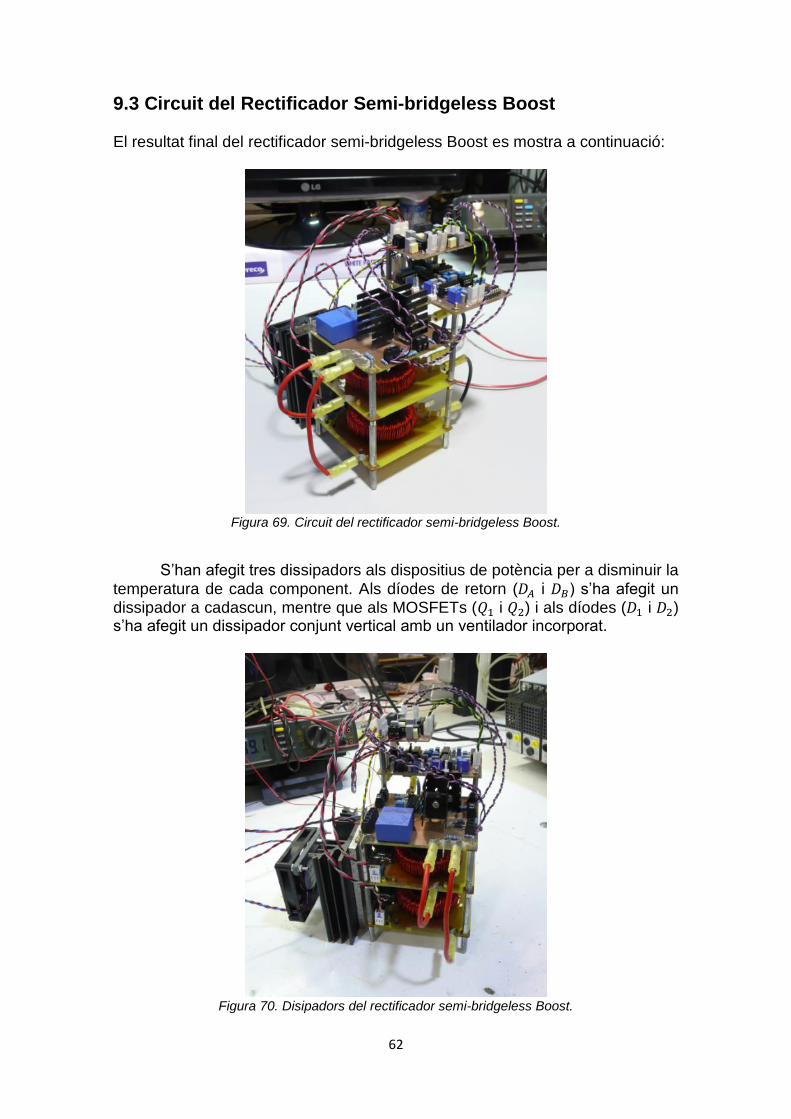
9.3 Circuit del Rectificador Semi-bridgeless Boost El resultat final del rectificador semi-bridgeless Boost es mostra a continuació:
Figura 69. Circuit del rectificador semi-bridgeless Boost.
S’han afegit tres dissipadors als dispositius de potència per a disminuir la
temperatura de cada component. Als díodes de retorn ( i ) s’ha afegit un dissipador a cadascun, mentre que als MOSFETs ( i ) i als díodes ( i ) s’ha afegit un dissipador conjunt vertical amb un ventilador incorporat.
Figura 70. Disipadors del rectificador semi-bridgeless Boost.

63
10 Resultats Experimentals
En aquest capítol es presenten els resultats experimentals de les proves que s’han dut a terme. Els aparells utilitzats han estat el següents:
Aparell Descripció Imatge
PACIFIC SmartSource
360-AMX
Font d’alimentació alterna d’alta potencia. Rang de potencia de
500 VA a 30kVA.
Electronic Load EA-EL 9750-75 HP
Càrrega elèctrica. Resistència ajustable de
0 a 200 Ohms. Rang de potència fins a
7,2kW.
Voltech PM6000
Analitzador de potència multi-fase.
Tektronix MSO3014
Oscil·loscopi digital.

64
10.1 Resultats Experimentals del Rectificador Semi-bridgeless Boost a 1kW A continuació es mostren els resultats experimentals obtinguts.
Figura 71. Rectificador semi-bridgeless Boost en funcionament.
10.1.1 Entrada del Rectificador Boost
El primer senyal que observem del rectificador Boost és la tensió d'entrada de cada un dels dos convertidors Boost que configuren el rectificador semi-bridgeless Boost. Es pot observar que tant el senyal corresponent al semicicle positiu com el senyal correspon al semicicle negatiu tenen un valor màxim de 325 volts.
Figura 72. Tensió d’entrada del rectificador Boost.

65
La següent gràfica correspon al senyal del corrent a l’entrada del rectificador. La gràfica obtinguda coincideix amb les simulacions realitzades
(capítol 8), amb un corrent de pic d’aproximadament .
Figura 73. Corrent d’entrada del rectificador Boost.
10.1.2 Inductors del Rectificador Boost
El corrent que circula per cada inductor es mostra en la següent gràfica. A diferència de la gràfica obtinguda a les simulacions, es pot observar com apareix un corrent negatiu a l’inductor del convertidor Boost que no està en funcionament. La generació d’aquest corrent negatiu és degut als components paràsits del rectificador.
Figura 74. Corrent als inductors.
66
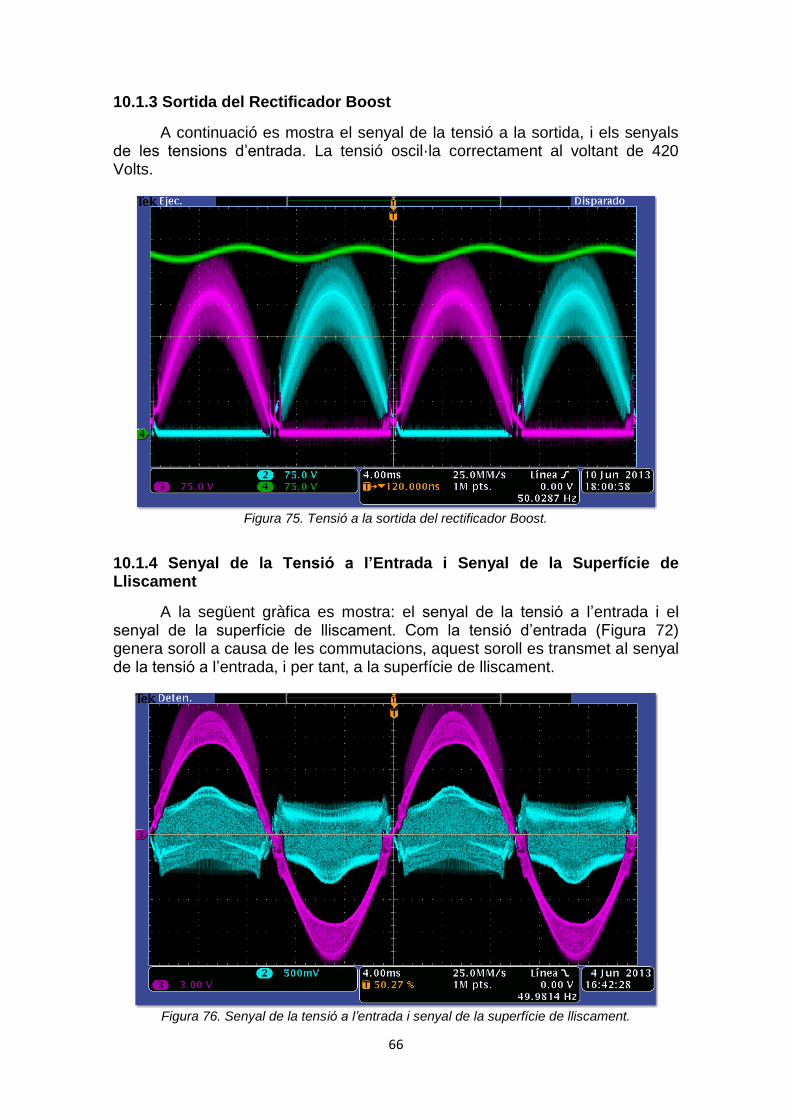
10.1.3 Sortida del Rectificador Boost
A continuació es mostra el senyal de la tensió a la sortida, i els senyals de les tensions d’entrada. La tensió oscil·la correctament al voltant de 420 Volts.
Figura 75. Tensió a la sortida del rectificador Boost.
10.1.4 Senyal de la Tensió a l’Entrada i Senyal de la Superfície de Lliscament
A la següent gràfica es mostra: el senyal de la tensió a l’entrada i el senyal de la superfície de lliscament. Com la tensió d’entrada (Figura 72) genera soroll a causa de les commutacions, aquest soroll es transmet al senyal de la tensió a l’entrada, i per tant, a la superfície de lliscament.
Figura 76. Senyal de la tensió a l’entrada i senyal de la superfície de lliscament.

67
10.1.5 Senyal de Control dels MOSFETs Per últim es mostra la gràfica dels senyals de control dels MOSFETs.
Figura 77. Senyal de control dels MOSFETs.
10.2 Millores Experimentals del Rectificador Semi-bridgeless Boost
Per tal de millorar el senyal de la tensió a l’entrada s’han afegit dos
condensadors de per eliminar el soroll.
Figura 78. Esquemàtic del senyal de la tensió d’entrada amb condensadors de 33nF.

68
Un cop afegits els dos condensadors es pot observar una gran millora en el senyal de la tensió a la entrada i, en conseqüència, en el senyal de la superfície de lliscament.
Figura 79. Senyal de la tensió d’entrada amb condensadors de 33nF.
10.3 Simulacions amb Elements Paràsits del Rectificador Semi-bridgeless Boost
Després d’observar la gràfica del corrent que circula per cada inductor (Figura 76), s’han repetit les simulacions afegint els components paràsits.
Per tal d’obtenir un senyal del corrent semblant a l’obtingut als resultats experimentals, s’han afegit els següents components paràsits:
Tensions en directe dels díodes (tant els de retorn com els dels MOSFETs).
Resistència dels díodes.
Capacitats dels díodes.
Resistència en sèrie dels inductors.

69
Un cop afegits els components paràsits, s’ha obtingut la següent gràfica:
Figura 80. Corrent real als inductors.
10.4 Mesures de Rendiment del Rectificador Semi-bridgeless Boost
Les mesures de rendiment s’han realitzat mantenint sempre fixes les tensions a l’entrada i a la sortida, es a dir:
Per tant, per a poder realitzar les mesures de rendiment a diferents potències, s’ha anat variant la càrrega del rectificador:
S’han realitzat dues mesures de rendiments amb dues configuracions diferents:
Configuració 1: MOSFET - IPW60R041C6 Díode - IDH16S60C
Configuració 2: MOSFET - IPW60R160C6 Díode - IDH10SG60C

70
10.4.1 Mesures de Rendiment
A la següent taula es mostren les dades obtingudes a través de l’aparell de mesura Voltech PM6000.
Configuració 1:
Configuració 2:
Es pot observar que a potències baixes la tensió d’entrada no arriba als
. El problema que s’ha trobat és que per arribar a una tensió d’entrada de es necessita una molt baixa, la qual ha estat impossible d’ajustar.
71
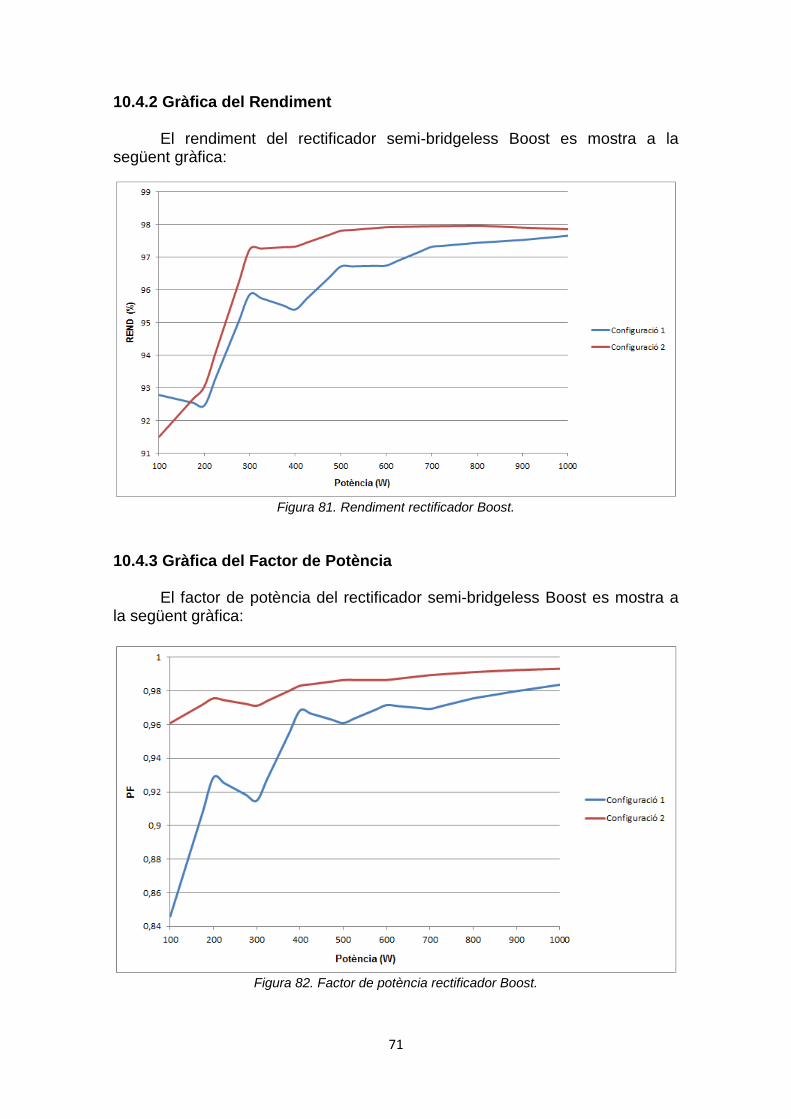
10.4.2 Gràfica del Rendiment El rendiment del rectificador semi-bridgeless Boost es mostra a la
següent gràfica:
Figura 81. Rendiment rectificador Boost.
10.4.3 Gràfica del Factor de Potència
El factor de potència del rectificador semi-bridgeless Boost es mostra a la següent gràfica:
Figura 82. Factor de potència rectificador Boost.

72
11 Conclusions
En aquest projecte s’ha desenvolupat un control basat en la teoria de control en mode lliscant, el qual permet controlar un rectificador semi-bridgeless Boost treballant a una freqüència variable de commutació. S’ha aconseguit que el rectificador es comporti com un resistor lliure de pèrdues el qual s’ha aplicat per la correcció del factor de potència.
En el capítol 5 d’aquest projecte s’ha obtingut el model ideal del rectificador Boost, partint de les equacions d’estat del rectificador i posteriorment obtenint una recurrència bilineal que defineix l’evolució de les variables d’estat.
Al capítol 6 s’ha desenvolupat el control basat en la teoria de control en
mode lliscant. La superfície de lliscament que s’ha plantejat és per tal que el rectificador semi-bridgeless Boost es comporti com un resistor lliure de pèrdues.
El capítol 8 engloba les simulacions realitzades en PSIM incorporant el control desenvolupat. Les simulacions s’han dut a terme considerant que el rectificador Boost s’utilitza com a corrector del factor de potència.
El capítol 10 presenta els resultats experimentals que s’han obtingut amb el prototipus que es pot veure a la figura 71.
Les proves experimentals que s’han dut a terme han intentat reproduir el màxim possible les simulacions realitzades.
En conclusió, els resultats experimentals obtinguts estan en acord a les
simulacions i per tant, es valida el funcionament del rectificador semi-bridgeless Boost per la correcció del factor de potència.

73
12 Referències [1] M. Matsuo, K. Matsui, L. Yamamoto, and F. Ueda, "A comparison of
various DC-DC converters and their application to power factor correction," in Industrial Electronics Society, 2000. IECON 2000. 26th Annual Confjerence of the IEEE, 2000, pp. 1007-1013 vol.2.
[2] O. Garcia, J. A. Cobos, R. Prieto, P. Alou, and J. Uceda, "Single phase
power factor correction: a survey," Power Electronics, IEEE Transactions on, vol. 18, pp. 749-755, 2003.
[3] F. Musavi, M. Edington, W. Eberle, and W. G. Dunford, "Evaluation and
Efficiency Comparison of Front End AC-DC Plug-in Hybrid Charger Topologies," Smart Grid, IEEE Transactions on, vol. 3, pp. 413-421, 2012.
[4] L. Huber, J. Yungtaek, and M. M. Jovanovic, "Performance Evaluation of
Bridgeless PFC Boost Rectifiers," Power Electronics, IEEE Transactions on, vol. 23, pp. 1381-1390, 2008.
[5] D. M. Mitchell, "AC-DC converter having an improved power factor,"
4412 277, 1983. [6] Y. Haoyi, Y. Zhihui, D. Jingya, Y. Chao, X. Xiaoni, and Y. Jianping,
"Common mode noise modeling and analysis of dual boost PFC circuit," in Telecommunications Energy Conference, 2004. INTELEC 2004. 26th Annual International, 2004, pp. 575-582.
[7] A. F. de Souza and I. Barbi, "High power factor rectifier with reduced
conduction and commutation losses," in Telecommunication Energy Conference, 1999. INTELEC '99. The 21st International, 1999, p. 5 pp.
[8] F. Musavi, W. Eberle, and W. Dunford, "A Phase Shifted Gating
Technique with Simplified Current Sensing for the Semi-Bridgeless ACto- DC Converter," Vehicular Technology, IEEE Transactions on, vol. PP, pp. 1-1, 2012.
[9] W. Frank, M. Reddig, and M. Schlenk, "New control methods for rectifier-
less PFC-stages," in Industrial Electronics, 2005. ISIE 2005. Proceedings of the IEEE International Symposium on, 2005, pp. 489- 493 vol. 2.
[10] V. Utkin, Sliding modes and their application in variable structure
systems: Mir Publishers, 1978. [11] H. Sira-Ramirez, "Sliding motions in bilinear switched networks," Circuits
and Systems, IEEE Transactions on, vol. 34, pp. 919-933, 1987.

74
[12] C. Zhou, R. B. Ridley, and F. C. Lee, "Design and analysis of a hysteretic boost power factor correction circuit," in Power Electronics Specialists Conference, 1990. PESC '90 Record., 21st Annual IEEE, 1990, pp. 800-807.
[13] L. Rossetto, G. Spiazzi, P. Tenti, B. Fabiano, and C. Licitra,
"Fastresponse high-quality rectifier with sliding mode control," Power Electronics, IEEE Transactions on, vol. 9, pp. 146-152, 1994.
[14] A. Cid-Pastor, L. Martinez-Salamero, A. El Aroudi, R. Giral, J. Calvente,
and R. Leyva, "Synthesis of loss-free resistors based on sliding-mode control and its applications in power processing," Control Engineering Practice, 25 February 2012 2012.
[15] A. Cid-Pastor, L. Martinez-Salamero, U. Ribes, and A. El Aroudi,
"Analysis and design of a loss-free resistor based on a boost converter in sliding-operation," in The 14th International Symposium on Power Electronics. Ee 2007, Novi Sad, Serbia & Montenegro, 2007.
[16] M. Bodetto, A. Cid-Pastor, L. Martinez-Salamero, and A. El-Aroudi,
"Design of an LFR based on a SEPIC converter under sliding mode control for HBLEDs applications," in Circuits and Systems (ISCAS), 2011 IEEE International Symposium on, 2011, pp. 2901-2904.
[17] S. Singer, "Realization of loss-free resistive elements," Circuits and
Systems, IEEE Transactions on, vol. 37, pp. 54-60, 1990.
75
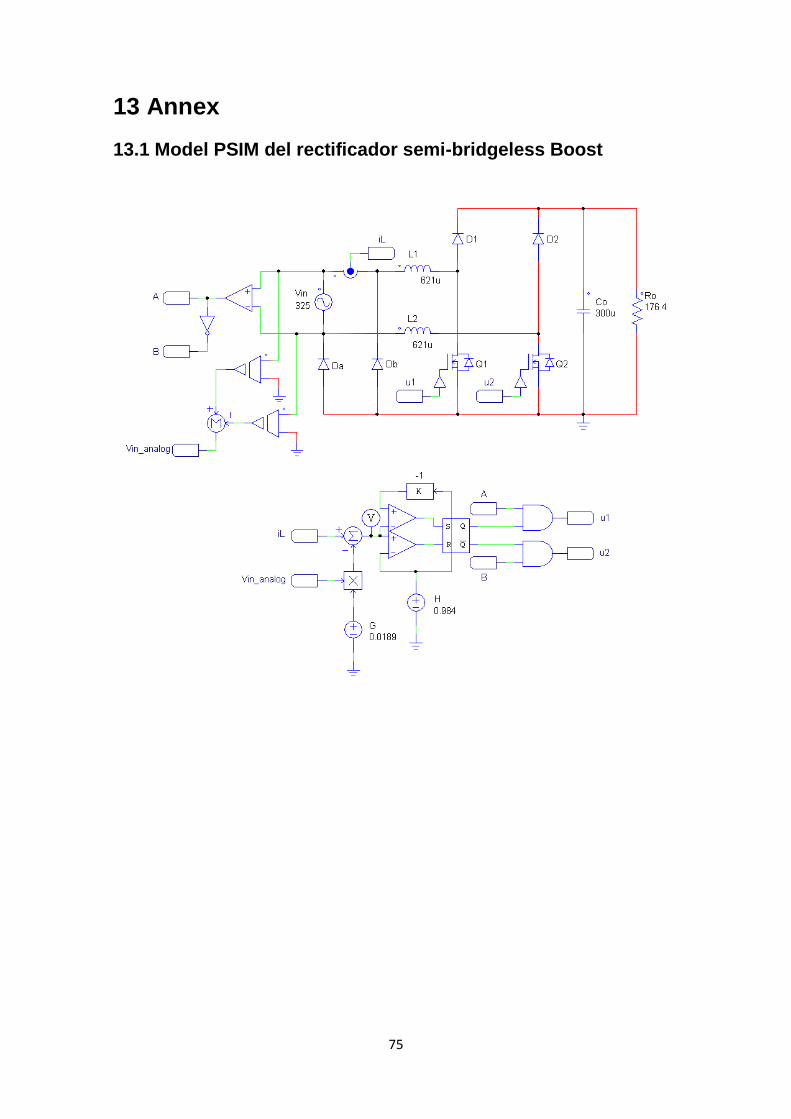
13 Annex
13.1 Model PSIM del rectificador semi-bridgeless Boost

76
13.2 Esquemàtic Fase 1 i Fase 2

77
13.3 Esquemàtic Interconnexió

78
13.4 Esquemàtic Sensat del corrent

79
13.5 Esquemàtic Lògica de control

80
13.6 Rectificador semi-bridgeless Boost

81