
D:/R/LaT File/Vibraciones Rescate de Articulos/Sistemas de un Grado de ... · Sistemas de un Grado...
32
Sistemas de un Grado de Libertad Sujetos a Vibraci´on Forzada. Jos´ e Mar´ ıa Rico Mart´ ınez Departamento de Ingenier´ ıaMec´anica Divisi´ on de Ingenier´ ıas, Campus Irapuato-Salamanca Universidad de Guanajuato Salamanca, Gto. 38730, M´ exico email: [email protected] 1 Introducci´ on En estas notas se presentan los fundamentos te´oricos de los sistemas de un grado de libertad sujetos a vibraci´on forzada. El objetivo de estas notas es su empleo como un auxiliar did´ actico en los cursos de vibraciones mec´ anicas. En esta secci´on, se analizar´a la respuesta de un sistema vibratorio de un grado de libertad sujeto a vibraci´on forzada, se analizar´an tres diferentes casos: 1. La excitaci´ on del sistema est´ a dada por una fuerza arm´ onica de amplitud constante. 2. La excitaci´ on del sistema est´ a dada por una fuerza arm´ onica de amplitud proporcional al cuadrado de la frecuencia de excitaci´ on. 3. La excitaci´ on del sistema est´ a dada por un movimiento arm´ onico de la base del sistema, que en este caso no est´ a fija, adem´ as la amplitud del movimiento es constante. 2 Excitaci´ on constituida por una fuerza arm´onica de amplitud con- stante Considere un sistema vibratorio de un grado de libertad sujeto a vibraci´on forzada, bajo una excitaci´ on representada porlafunci´on F (t)= F 0 Senωt, est´ a excitaci´ on es una fuerza arm´ onica de amplitud constante y frecuencia ω. Vea la figura 1. Figure 1: Sistema Vibratorio de un Grado de Libertad Sujeto a Vibraci´on Forzada. Para obtener la ecuaci´ on de movimiento del sistema. Suponga que a partir de la posici´on de equilibrio del sistema, el sistema se separa de su posici´on de equilibrio una distancia y(t) comprimiendo el resorte y se le da una 1
Transcript of D:/R/LaT File/Vibraciones Rescate de Articulos/Sistemas de un Grado de ... · Sistemas de un Grado...
Sistemas de un Grado de Libertad Sujetos a Vibracion Forzada.
Jose Marıa Rico Martınez
Departamento de Ingenierıa Mecanica
Division de Ingenierıas, Campus Irapuato-Salamanca
Universidad de Guanajuato
Salamanca, Gto. 38730, Mexico
email: [email protected]
1 Introduccion
En estas notas se presentan los fundamentos teoricos de los sistemas de un grado de libertad sujetos a vibracionforzada. El objetivo de estas notas es su empleo como un auxiliar didactico en los cursos de vibraciones mecanicas.
En esta seccion, se analizara la respuesta de un sistema vibratorio de un grado de libertad sujeto a vibracionforzada, se analizaran tres diferentes casos:
1. La excitacion del sistema esta dada por una fuerza armonica de amplitud constante.
2. La excitacion del sistema esta dada por una fuerza armonica de amplitud proporcional al cuadrado de lafrecuencia de excitacion.
3. La excitacion del sistema esta dada por un movimiento armonico de la base del sistema, que en este caso noesta fija, ademas la amplitud del movimiento es constante.
2 Excitacion constituida por una fuerza armonica de amplitud con-
stante
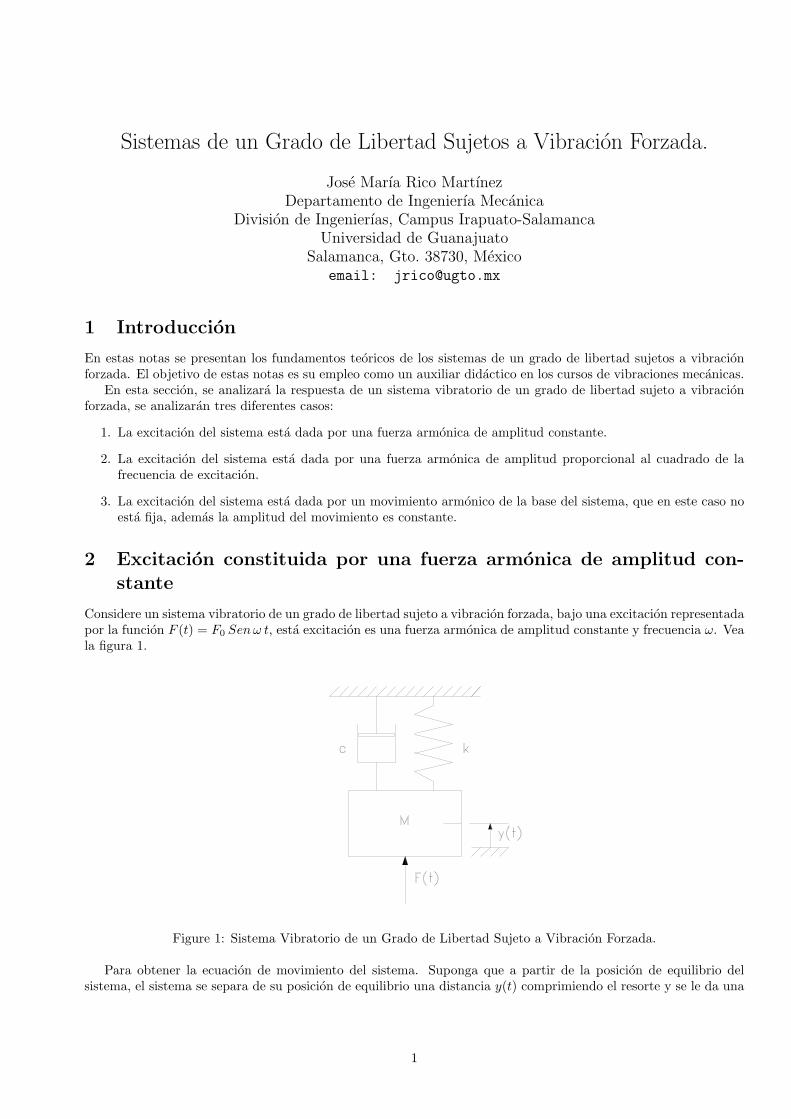
Considere un sistema vibratorio de un grado de libertad sujeto a vibracion forzada, bajo una excitacion representadapor la funcion F (t) = F0 Senω t, esta excitacion es una fuerza armonica de amplitud constante y frecuencia ω. Veala figura 1.
Figure 1: Sistema Vibratorio de un Grado de Libertad Sujeto a Vibracion Forzada.
Para obtener la ecuacion de movimiento del sistema. Suponga que a partir de la posicion de equilibrio delsistema, el sistema se separa de su posicion de equilibrio una distancia y(t) comprimiendo el resorte y se le da una
1

velocidad dada por y(t) en la direccion positiva. Entonces, observando el diagrama de cuerpo libre de la masa, veala figura 2, y aplicando la segunda ley de Newton, se tiene que1
Figure 2: Diagrama de Cuerpo Libre Para un Sistema Vibratorio de un Grado de Libertad Sujeto a una FuerzaArmonica de Amplitud Constante.
ΣFy =Md2 y(t)
d t2; −M g + k (δest − y(t))− c
d y(t)
d t+ F0 Senω t =M
d2 y(t)
d t2,
o
−M g + k δest − k y(t)− cd y(t)
d t+ F0 Senω t =M
d2 y(t)
d t2.
Por lo tanto, sustituyendo la ecuacion (1)
δest =M g
k(1)
que determina la deformacion estatica del resorte, se obtiene la ecuacion de movimiento del sistema vibratorio
Md2y
dt2+ c
dy
dt+ ky = F0 Senω t, (2)
donde, M es la masa del sistema, k es la constante del resorte, c es la constante del amortiguador, y es la variableque representa el movimiento de la masa y t es el tiempo.
La ecuacion (2) es una ecuacion diferencial lineal de segundo orden, pero a diferencia de las secciones anteriores,esta ecuacion diferencial es no homogenea. Nuevamente de la teorıa de las ecuaciones diferenciales ordinarias, sesabe que la solucion general de la ecuacion (2) esta dada por
yG(t) = yH(t) + yP (t), (3)
donde, yH(t) es la solucion de la ecuacion homogenea asociada; es decir, la solucion de la ecuacion diferencial que seobtiene eliminando la excitacion F (t) = F0 Senω t, esta parte de la solucion se denomina respuesta en el estado
transitorio y yP (t) es una solucion de la ecuacion no homogenea, esta parte de la solucion se denomina respuesta
en el estado permanente o estacionario. La solucion de la ecuacion homogenea asociada esta dada por
yH(t) = e−c
2Mt
[
C1 e
√
( c2M )
2−
kM
t + C2 e−
√
( c2M )
2−
kM
t
]
(4)
Evidentemente, es conveniente determinar cual de los tres posibles casos —sobreamortiguado, crıticamente amor-tiguado o subamortiguado— es el aplicable para este caso. Es importante senalar que puesto que en todos lossistemas existe amortiguamiento en mayor o menor grado, esta parte de la solucion desaparece con el tiempo, deallı su denominacion estado transitorio.
1Ademas se supondra que y(t) < δest, de manera que el resorte esta sujeto a tension, la ecuacion de movimiento del sistema esindependiente de esta suposicion, el objetivo es evitar ambigedades en la derivacion de la ecuacion.
2

La parte importante de este analisis es la determinacion de la respuesta en el estado estacionario o permanente.El procedimiento para obtener esta parte de la solucion se fundamenta en que el espacio generado por el conjuntode funciones {Cosω t, Senω t} es un espacio invariante respecto a las derivadas con respecto a t de cualquier orden.De manera que se propone como solucion
yP (t) = ACosω t+B Senω t. (5)
Derivando la solucion propuesta con respecto al tiempo dos veces, se tiene que
d yP (t)
d t= −Aω Senω t+B ωCosω t,
d2 yP (t)
d t2= −Aω2 Cosω t−B ω2 Senω t, (6)
Sustituyendo las ecauciones (5, 6) en la ecuacion (2), se tiene que
M(
−Aω2 Cosω t−B ω2 Senω t)
+ c (−Aω Senω t+B ωCosω t)
+k (ACosω t+B Senω t) = F0 Senω t.
Puesto que el conjunto {Cosω t, Senω t} es linealmente independiente, es posible separar la ecuacion en un sistemade ecuaciones lineales en las incognitas A y B,
A(
k −M ω2)
+B (c ω) = 0
A (−c ω) +B(
k −M ω2)
= F0,
Es importante senalar que, de manera semejante a la solucion de sistemas vibratorios sujetos a vibracion libre, estemetodo permite transformar una ecuacion diferencial en un sistema de ecuaciones lineales, un problema muchomas simple.
El determinante de la matriz de coeficientes del sistema lineal, denotado por ∆, esta dado por
∆ =(
k −M ω2)2
+ (c ω)2= k2
[
(
1− M ω2
k
)2
+(c ω
k
)2
]
Recordando la definicion del amortiguamiento crıtico, ecuacion (7),
c2c − 4M k = 0 o cc = 2√M k = 2M
√
k
M= 2M ωn, (7)
y de la frecuencia natural del sistema no amortiguado asociado, se tiene que
∆ = k2
[
1−(
ω
ωn
)2]2
+
(
2c
cc
ω
ωn
)2
(8)
De aquı que, las soluciones para los coeficientes A y B estan dadas por
A =−F0 (c ω)
k2
{
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
} B =F0
(
k −M ω2)
k2
{
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
} (9)
Por lo tanto, la solucion particular de la ecuacion diferencial esta dada por
yP (t) =−F0 (c ω) Cosω t+ F0
(
k −M ω2)
Senω t
k2
{
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
}
= δ0
−2 ccc
ωωnCosω t+
[
1−(
ωωn
)2]
Senω t
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
=δ0
√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
[
1−(
ωωn
)2]
Senω t− 2 ccc
ωωnCosω t
√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
=δ0 Sen (ω t− φ)
√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
, (10)
3
donde δ0 es la deformacion que sufrirıa el resorte si la fuerza F (t) = F0 Senω t no fuera armonica sino estatica, esdecir
δ0 =F0
k, (11)
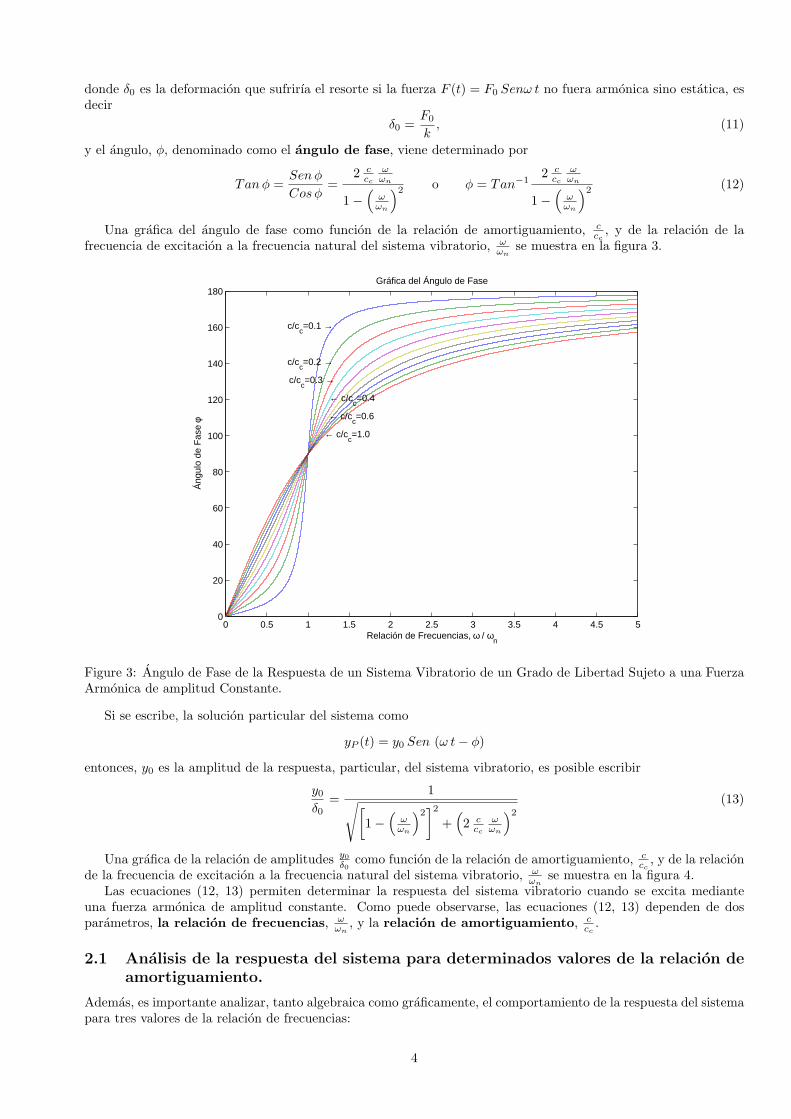
y el angulo, φ, denominado como el angulo de fase, viene determinado por
Tanφ =Senφ
Cos φ=
2 ccc
ωωn
1−(
ωωn
)2o φ = Tan−1
2 ccc
ωωn
1−(
ωωn
)2(12)
Una grafica del angulo de fase como funcion de la relacion de amortiguamiento, ccc, y de la relacion de la
frecuencia de excitacion a la frecuencia natural del sistema vibratorio, ωωn
se muestra en la figura 3.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
20
40
60
80
100
120
140
160
180
Relación de Frecuencias, ω / ωn
Áng
ulo
de F
ase
φ
Gráfica del Ángulo de Fase
c/cc=0.1 →
c/cc=0.2 →
c/cc=0.3 →
← c/cc=0.4
← c/cc=0.6
← c/cc=1.0
Figure 3: Angulo de Fase de la Respuesta de un Sistema Vibratorio de un Grado de Libertad Sujeto a una FuerzaArmonica de amplitud Constante.
Si se escribe, la solucion particular del sistema como
yP (t) = y0 Sen (ω t− φ)
entonces, y0 es la amplitud de la respuesta, particular, del sistema vibratorio, es posible escribir
y0δ0
=1
√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
(13)
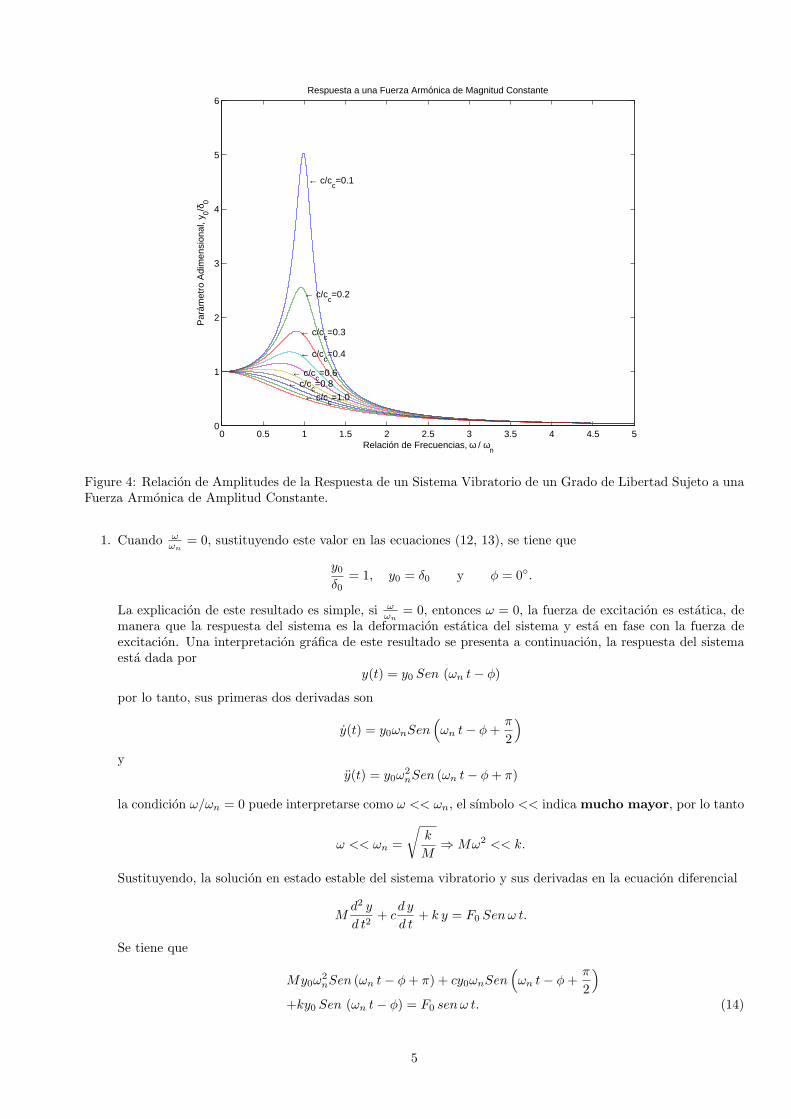
Una grafica de la relacion de amplitudes y0
δ0como funcion de la relacion de amortiguamiento, c
cc, y de la relacion
de la frecuencia de excitacion a la frecuencia natural del sistema vibratorio, ωωn
se muestra en la figura 4.Las ecuaciones (12, 13) permiten determinar la respuesta del sistema vibratorio cuando se excita mediante
una fuerza armonica de amplitud constante. Como puede observarse, las ecuaciones (12, 13) dependen de dosparametros, la relacion de frecuencias, ω
ωn, y la relacion de amortiguamiento, c
cc.
2.1 Analisis de la respuesta del sistema para determinados valores de la relacion de
amortiguamiento.
Ademas, es importante analizar, tanto algebraica como graficamente, el comportamiento de la respuesta del sistemapara tres valores de la relacion de frecuencias:
4
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
1
2
3
4
5
6
Relación de Frecuencias, ω / ωn
Par
ámet
ro A
dim
ensi
onal
, y0/δ
0
Respuesta a una Fuerza Armónica de Magnitud Constante
← c/cc=0.1
← c/cc=0.2
← c/cc=0.3
← c/cc=0.4
← c/cc=1.0
← c/cc=0.6
← c/cc=0.8
Figure 4: Relacion de Amplitudes de la Respuesta de un Sistema Vibratorio de un Grado de Libertad Sujeto a unaFuerza Armonica de Amplitud Constante.
1. Cuando ωωn
= 0, sustituyendo este valor en las ecuaciones (12, 13), se tiene que
y0δ0
= 1, y0 = δ0 y φ = 0◦.
La explicacion de este resultado es simple, si ωωn
= 0, entonces ω = 0, la fuerza de excitacion es estatica, demanera que la respuesta del sistema es la deformacion estatica del sistema y esta en fase con la fuerza deexcitacion. Una interpretacion grafica de este resultado se presenta a continuacion, la respuesta del sistemaesta dada por
y(t) = y0 Sen (ωn t− φ)
por lo tanto, sus primeras dos derivadas son
y(t) = y0ωnSen(
ωn t− φ+π
2
)
yy(t) = y0ω
2
nSen (ωn t− φ+ π)
la condicion ω/ωn = 0 puede interpretarse como ω << ωn, el sımbolo << indica mucho mayor, por lo tanto
ω << ωn =
√
k
M⇒Mω2 << k.
Sustituyendo, la solucion en estado estable del sistema vibratorio y sus derivadas en la ecuacion diferencial
Md2 y
d t2+ c
d y
d t+ k y = F0 Senω t.
Se tiene que
My0ω2
nSen (ωn t− φ+ π) + cy0ωnSen(
ωn t− φ+π
2
)
+ky0 Sen (ωn t− φ) = F0 senω t. (14)
5

Figure 5: Interpretacion Grafica de la Respuesta del Sistema Vibratorio Para Cuando ωωn
= 0.
Recurriendo a la interpretacion de funciones armonicas como fasores, una representacion grafica de estaecuacion esta dada por la figura 5.
Debe notarse que las fuerzas del resorte, del amortiguador y la de inercia se han orientado, para simplificarel problema, a lo largo de los ejes coordenados. Evidentemente, a medida que ω
ωn→ 0, el vector de magnitud
k y0 es mucho mayor que los restantes de manera que
φ = 0◦ y F0 = k y0
Por lo tanto
y0 =F0
k= δ0 y
y0δ0
= 1.
2. Cuando ωωn
→ ∞, sustituyendo este valor en las ecuaciones (12, 13) y evaluando el lımite de manera apropiadapues la sustitucion simple conduce a una indeterminacion, se tiene que
y0δ0
= 0, y0 = 0 y φ = 180◦.
Nuevamente la explicacion es simple, si ωωn
→ ∞, entonces ω → ∞ la frecuencia de la excitacion es tanelevada que el sistema, la masa, es incapaz de seguir la excitacion.
La interpretacion grafica de este resultado se fundamenta, como en el caso anterior, en la representaciongrafica de funciones armonicas como fasores. Sin embargo, en este caso, se tiene que la condicion ω/ωn → ∞puede interpretarse como ω << ωn, el sımbolo << indica mucho mayor, por lo tanto
ω << ωn =
√
k
M⇒ k << Mω2
Sustituyendo, la solucion en estado estable del sistema vibratorio y sus derivadas en la ecuacion diferencial
Md2 y
d t2+ c
d y
d t+ k y = F0 Senω t.
Se tiene que
My0ω2
nSen (ωn t− φ+ π) + cy0ωnSen(
ωn t− φ+π
2
)
+ky0 Sen (ωn t− φ) = F0 senω t. (15)
Recurriendo a la interpretacion de funciones armonicas como fasores, una representacion grafica de estaecuacion esta dada por la figura 6.
6

Figure 6: Interpretacion Grafica de la Respuesta del Sistema Vibratorio Para Cuando ωωn
→ ∞.
Debe notarse que las fuerzas del resorte, del amortiguador y la de inercia se han orientado, para simplificar elproblema, a lo largo de los ejes coordenados. Evidentemente, a medida que ω
ωn→ ∞, el vector de magnitud
M ω2y0 es mucho mayor que los restantes de manera que
φ = 180◦ y F0 =M ω2y0
Por lo tanto
y0 =F0
M ω2= 0 o y0 =
F0
kMkω2
=δ0
(
ωωn
)2y
y0δ0
= 0.
Pues ωωn
→ ∞.
3. Cuando ωωn
= 1 sustituyendo este valor en las ecuaciones (12, 13), se tiene que
y0δ0
=1
2 ccc
, y0 =δ02 ccc
y φ = 90◦.
Es importante senalar que en los dos primeros casos, el resultado es independiende del valor de la relacion de amor-tiguamiento c
cc. Ademas, el tercer caso representa el valor para el cual se presenta el fenomeno de resonancia.
En este fenomeno una fuerza relativamente pequena puede producir vibraciones de amplitud elevada, pues cuandoωωn
= 1,
y0 =δ02 ccc
(16)
y usualmente los valores de la relacion de amortiguamento es, usualmente pequena, menor a 0.1. Recurriendo a lainterpretacion de funciones armonicas como fasores, una representacion grafica de esta ecuacion esta dada por lafigura 7.
Debe notarse que las fuerzas del resorte, del amortiguador y la de inercia se han orientado, para simplificar elproblema, a lo largo de los ejes coordenados. Evidentemente, si ω
ωn= 1, se tiene que
ω = ωn =
√
k
Mo ω2 =
k
Mo M ω2 = k
De aquı que, los vectores de magnitud M ω2y0 y k y0 son iguales. Por lo tanto, los restantes vectores tambiendeben ser iguales; es decir
F0 = c ωy0 y φ = 90◦
Ademas, recordando que cc = 2√kM = 2 k
ωny ω = ωn se tiene que
y0 =F0
c ω=
F0
c ωn
=F0
c 2 kcc
=F0
k
2 ccc
=δ02 ccc
.
7

Figure 7: Interpretacion Grafica de la Respuesta del Sistema Vibratorio Para Cuando ωωn
= 1.
2.2 Analisis de un Sistema Vibratorio No Amortiguado en Condiciones de Resonan-
cia.
Existe un caso especial que merece atencion adicional. Considere un sistema no amortiguado sujeto a una fuerza
armonica de amplitud constante cuya frecuencia ω es igual a la frecuencia natural del sistema ωn =√
kM, de modo
que la ecuacion diferencial esta dada por
Md2 y
d t2+ k y = F0 Senω t donde ω = ωn =
√
k
M. (17)
Se sabe que la ecuacion de la solucion general de la ecuacion homogenea asociada esta dada por
yH(t) = ACos (ωn t) +B Sen (ωn t) (18)
Entonces, debe notarse que en este caso no es posible que la solucion particular de la ecuacion no homogeneaeste dada por
yP (t) = C1 Cos (ωn t) + C2 Sen (ωn t) ,
pues esta es precisamente la solucion de la ecuacion homogenea asociada. De la teoria de ecuaciones diferenciales,se propone como solucion
yP (t) = C1 t Cos (ωn t) + C2 t Sen (ωn t) (19)
Derivando esta expresion respecto al tiempo dos veces, se tiene que
d yP (t)
d t= C1 Cos (ωn t)− C1 t ωn Sen (ωn t) + C2 Sen (ωn t) + C2 t ωn Cos (ωn t) .
y
d2 yP (t)
d t2= −C1 ωn Sen (ωn t)− C1 ωn Sen (ωn t)− C1 t ω
2
n Cos (ωn t)
+C2 ωn Cos (ωn t) + C2 ωn Cos (ωn t)− C2 t ω2
n Sen (ωn t)
= −2C1 ωn Sen (ωn t)− C1 t ω2
n Cos (ωn t) + 2C2 ωn Cos (ωn t)
−C2 t ω2
n Sen (ωn t) . (20)
Sustituyendo las ecuaciones (19) y (20) en la ecuacion (17), se tiene que
M[
− 2C1 ωn Sen (ωn t)− C1 t ω2
n Cos (ωn t) + 2C2 ωn Cos (ωn t)
−C2 t ω2
n Sen (ωn t)]
+ k[
C1 t Cos (ωn t) + C2 t Sen (ωn t)]
= F0 Senω t (21)
8

o, puesto que el conjunto de funciones {Sen (ωn t) , t Sen (ωn t) , Cos (ωn t) ,t Cos (ωn t)}, la ecuacion vectorial
0 = Sen (ωn t)[
− 2C1M ωn − F0
]
+ Cos (ωn t)[
2C2M ωn
]
+t Sen (ωn t)[
−M C2 ω2
n + k C2
]
+ t Cos (ωn t)[
−M C1 ω2
n + k C1
]
(22)
conduce a 4 ecuaciones escalares
−2C1M ωn − F0 = 0 −M C1 ω2
n + k C1 = 0
2C2M ωn = 0 −M C2 ω2
n + k C2 = 0
Para C2 la solucion esta dada porC2 = 0.
Para C1 se tiene que de la primera ecuacion
C1 = − F0
2M= −
F0
k
2Mk
= − δ02
ω2n
= −1
2δ0 ω
2
n (23)
Mientras que sustituyendo ω2
n = kM, se tiene que
−M C1
k
M+ k C1 = C1 [−k + k] = 0.
De manera que esta ecuacion es redundante, por lo tanto, la solucion particular para esta excitacion esta dada por
yP (t) = −1
2δ0 ω
2
n t Cos (ωn t) (24)
Por lo tanto, la solucion general de la ecuacion diferencial esta dada por
yG(t) = yH(t) + yP (t) = ACos (ωn t) +B Sen (ωn t)−1
2δ0 ω
2
n t Cos (ωn t) (25)
Si las condiciones iniciales para este sistema son para t = 0, yG(0) = 0 y yG(0) = 0, por lo tanto
yG(t) = −AωnSen (ωn t) +B ωnCos (ωn t)−1
2δ0 ω
2
n Cos (ωn t) +1
2δ0 t ω
3
n Sen (ωn t) (26)
Sustituyendo los condiciones iniciales, se tiene que
ACos (0) +B Sen (0)− 1
2δ0 ω
2
n 0Cos (0) = 0 ⇒ A = 0.
y
−AωnSen (0) +B ωnCos (0)−1
2δ0 ω
2
n Cos (0) +1
2δ0 0ω
3
n Sen (0) = 0 ⇒ B =1
2δ0 ωn
Por lo tanto, la solucion particular esta dado por
yG(t) =1
2δ0 ωn Sen (ωn t)−
1
2δ0 ω
2
n t Cos (ωn t) (27)
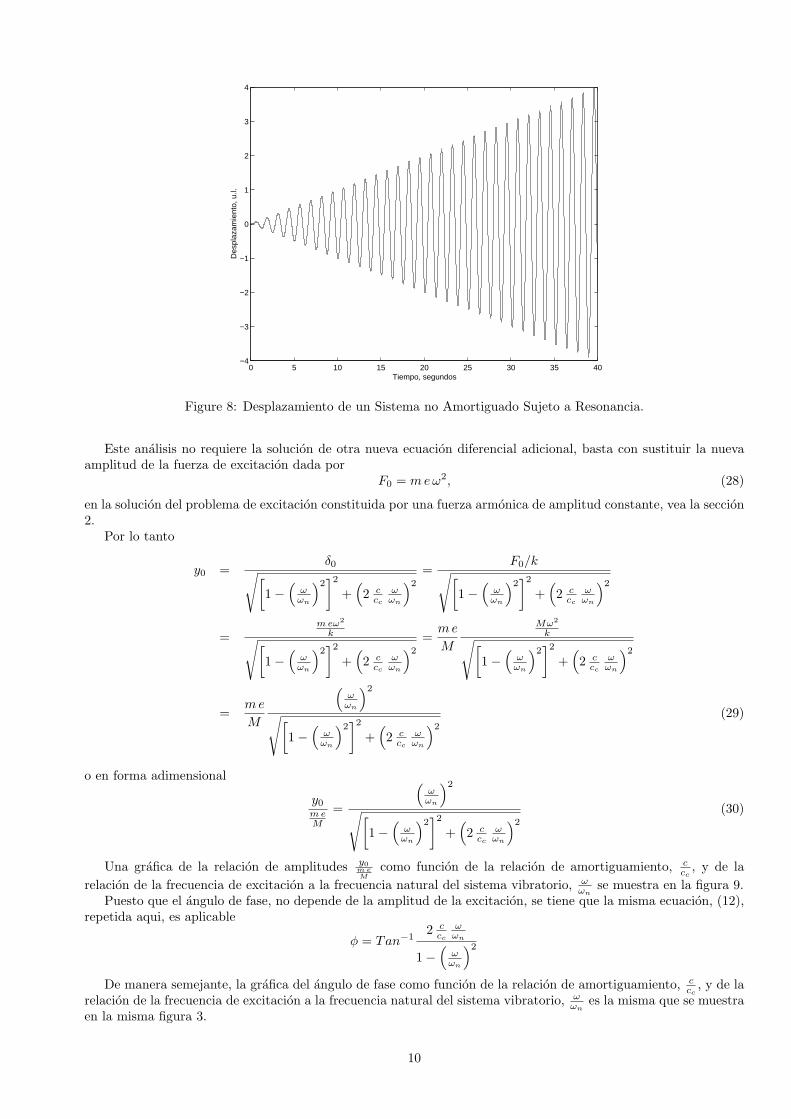
La figura 8 muestra el comportamiento de un sistema no amortiguado sujeto a resonancia.
3 Excitacion constituida por una fuerza armonica de amplitud pro-
porcional al cuadrado de la frecuencia de la excitacion
Considere un sistema vibratorio de un grado de libertad sujeto a vibracion forzada, bajo una excitacion representadapor la funcion F (t) = meω2 Senω t. Esta excitacion es una fuerza armonica de amplitud proporcional al cuadradode la frecuencia, dada por ω. Este tipo de excitacion se presenta cuando un eje o rotor desbalanceado gira a unavelocidad angular dada por ω, entonces, me es el desbalance del rotor.
9
0 5 10 15 20 25 30 35 40−4
−3
−2
−1
0
1
2
3
4
Tiempo, segundos
Des
plaz
amie
nto,
u.l.
Figure 8: Desplazamiento de un Sistema no Amortiguado Sujeto a Resonancia.
Este analisis no requiere la solucion de otra nueva ecuacion diferencial adicional, basta con sustituir la nuevaamplitud de la fuerza de excitacion dada por
F0 = meω2, (28)
en la solucion del problema de excitacion constituida por una fuerza armonica de amplitud constante, vea la seccion2.
Por lo tanto
y0 =δ0
√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
=F0/k
√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
=meω2
k√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
=me
M
Mω2
k√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
=me
M
(
ωωn
)2
√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
(29)
o en forma adimensional
y0meM
=
(
ωωn
)2
√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
(30)
Una grafica de la relacion de amplitudes y0meM
como funcion de la relacion de amortiguamiento, ccc, y de la
relacion de la frecuencia de excitacion a la frecuencia natural del sistema vibratorio, ωωn
se muestra en la figura 9.Puesto que el angulo de fase, no depende de la amplitud de la excitacion, se tiene que la misma ecuacion, (12),
repetida aqui, es aplicable
φ = Tan−12 c
cc
ωωn
1−(
ωωn
)2
De manera semejante, la grafica del angulo de fase como funcion de la relacion de amortiguamiento, ccc, y de la
relacion de la frecuencia de excitacion a la frecuencia natural del sistema vibratorio, ωωn
es la misma que se muestraen la misma figura 3.
10
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
1
2
3
4
5
6
Relación de Frecuencias, ω / ωn
Par
ámet
ro A
dim
ensi
onal
, y0 M
/m e
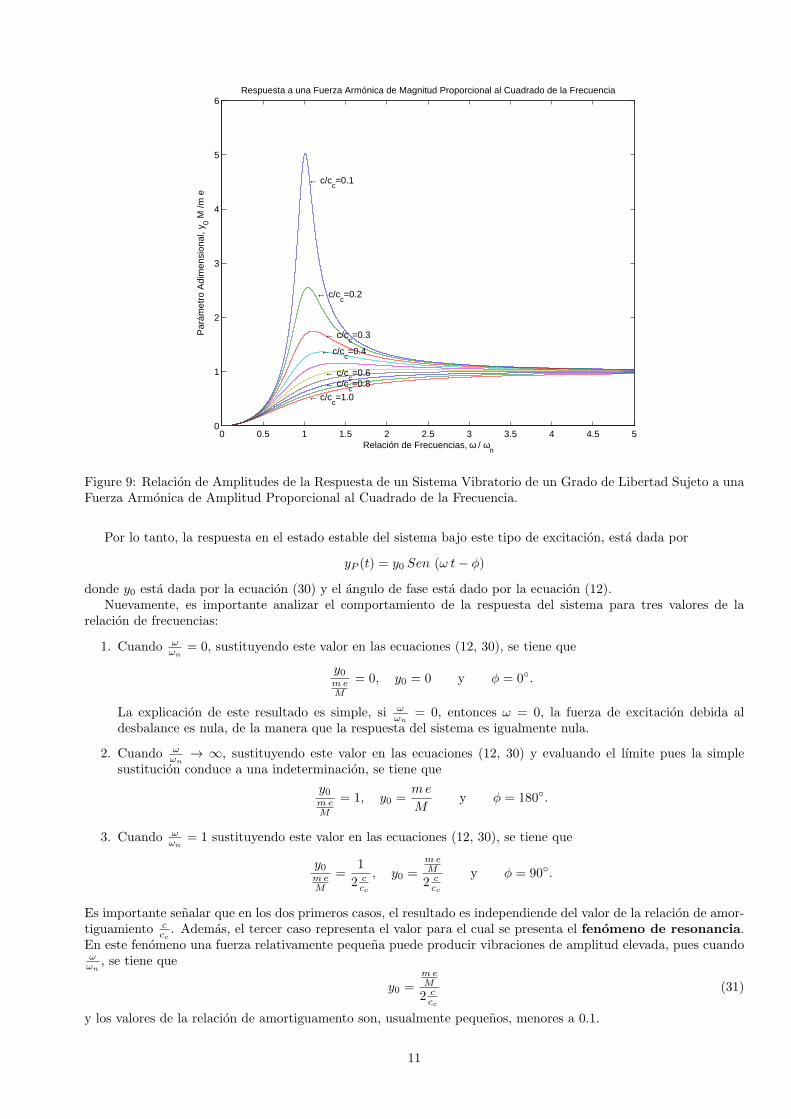
Respuesta a una Fuerza Armónica de Magnitud Proporcional al Cuadrado de la Frecuencia
← c/cc=0.1
← c/cc=0.2
← c/cc=0.3
← c/cc=0.4
← c/cc=0.8
← c/cc=1.0
← c/cc=0.6
Figure 9: Relacion de Amplitudes de la Respuesta de un Sistema Vibratorio de un Grado de Libertad Sujeto a unaFuerza Armonica de Amplitud Proporcional al Cuadrado de la Frecuencia.
Por lo tanto, la respuesta en el estado estable del sistema bajo este tipo de excitacion, esta dada por
yP (t) = y0 Sen (ω t− φ)
donde y0 esta dada por la ecuacion (30) y el angulo de fase esta dado por la ecuacion (12).Nuevamente, es importante analizar el comportamiento de la respuesta del sistema para tres valores de la
relacion de frecuencias:
1. Cuando ωωn
= 0, sustituyendo este valor en las ecuaciones (12, 30), se tiene que
y0meM
= 0, y0 = 0 y φ = 0◦.
La explicacion de este resultado es simple, si ωωn
= 0, entonces ω = 0, la fuerza de excitacion debida aldesbalance es nula, de la manera que la respuesta del sistema es igualmente nula.
2. Cuando ωωn
→ ∞, sustituyendo este valor en las ecuaciones (12, 30) y evaluando el lımite pues la simplesustitucion conduce a una indeterminacion, se tiene que
y0meM
= 1, y0 =me
My φ = 180◦.
3. Cuando ωωn
= 1 sustituyendo este valor en las ecuaciones (12, 30), se tiene que
y0meM
=1
2 ccc
, y0 =meM
2 ccc
y φ = 90◦.
Es importante senalar que en los dos primeros casos, el resultado es independiende del valor de la relacion de amor-tiguamiento c
cc. Ademas, el tercer caso representa el valor para el cual se presenta el fenomeno de resonancia.
En este fenomeno una fuerza relativamente pequena puede producir vibraciones de amplitud elevada, pues cuandoωωn
, se tiene que
y0 =meM
2 ccc
(31)
y los valores de la relacion de amortiguamento son, usualmente pequenos, menores a 0.1.
11

4 Excitacion constituida por un movimiento armonico de la base
Considere un sistema vibratorio de un grado de libertad sujeto a vibracion forzada. Sin embargo, a diferencia delos dos casos anteriores, la excitacion esta producida por el movimiento de la base como muestra la figura 10, dondex(t) y y(t) representan los movimientos absolutos del cuerpo y la base respectivamente.
Figure 10: Sistema Vibratorio de un Grado de Libertad Sujeto a Vibracion Forzada Debido a Movimiento en laBase.
Se supondra que en la posicion mostrada en la figura, el sistema esta en reposo. Entonces, es posible recurrir alas ecuaciones de la estatica para determinar la deformacion estatica del resorte, δest, para tal fin
ΣFy = 0 −M g + k δest = 0,
por lo tanto,
δest =M g
k(32)
La longitud del resorte en esta posicion, esta dada por l0−δest, donde l0 es la longitud libre del resorte. Supongaahora que el movimiento absoluto de la base y(t) esta dado por
y(t) = y0 Senω t. (33)
Para obtener la ecuacion de movimiento del sistema. Suponga que x(t) > y(t) y que x(t) − y(t) > δest.2
Entonces, observando el diagrama de cuerpo libre de la masa, vea la figura 11, y aplicando la segunda ley deNewton, se tiene que
ΣFy =Md2 x(t)
d t2; −M g − k (x(t)− y(t)− δest)− c
(
d x(t)
d t− d y(t)
d t
)
=Md2 x(t)
d t2,
o
−M g + k δest − k (x(t)− y(t))− c
(
d x(t)
d t− d y(t)
d t
)
=Md2 x(t)
d t2.
Por lo tanto, sustituyendo la ecuacion (1) que determina la deformacion estatica del resorte, se obtiene laecuacion de movimiento del sistema vibratorio
Md2x
dt2+ c
(
dx
dt− dy
dt
)
+ k (x− y) = 0, (34)
donde, M es la masa del sistema, k es la constante del resorte, c es la constante del amortiguador y t es el tiempo.Definiendo la variable
z(t) ≡ x(t)− y(t), (35)
2La ecuacion de movimiento es independiente de estas suposiciones, pero estas suposiciones permiten eliminar ambiguedades en lasuma de fuerzas necesaria para obtener la ecuacion.
12

Figure 11: Diagrama de Cuerpo Libre Para un Sistema Vibratorio de un Grado de Libertad Sujeto a VibracionForzada Debida a un Movimiento de la Base.
el significado fısico de esta variable es el movimiento relativo de la masa respecto a la base. Ademas,
dz
dt=dx
dt− dy
dty M
d2z
dt2=M
d2x
dt2−M
d2y
dt2(36)
Por lo tanto
Md2x
dt2=M
d2z
dt2+M
d2y
dt2=M
d2z
dt2−M y0 ω
2 Senω t. (37)
Sustituyendo ecuaciones (36, 37) en la ecuacion (34), se tiene que
Md2z
dt2+ c
dz
dt+ k z =M y0 ω
2 Senω t. (38)
Nuevamente, este analisis no requiere la solucion de otra nueva ecuacion diferencial adicional, basta con sustituirla nueva amplitud de la fuerza de excitacion dada por
F0 =M y0 ω2, (39)
en la solucion del problema de excitacion constituida por una fuerza armonica de amplitud constante, vea la seccion2.
Por lo tanto
z0 =δ0
√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
=F0/k
√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
=M y0 ω2
k√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
= y0
(
ωωn
)2
√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
(40)
De manera que la solucion del movimiento relativa de la masa respecto a la base, z(t), esta dada por
z(t) = z0 Sen (ω t− φ) (41)
donde z0 esta dado por la ecuacion (40) y el angulo de fase φ, esta dado por
φ = Tan−12 c
cc
ωωn
1−(
ωωn
)2(42)
13

Una vez determinado el movimiento relativo entre la masa y la base, es posible determinar el movimientoabsoluto de la base, x(t), que de acuerdo de la definicion dada por la ecuacion (35), esta dada por3
x(t) = z(y) + y(t) = z0 Sen (ω t− φ) + y0 Senω t (43)
Para tal fin, se sustituyen los valores de las funciones coseno y seno del angulo φ, dadas por
Cosφ =1−
(
ωωn
)2
√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
Senφ =2 c
cc
ωωn
√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
.
Por lo tanto
x(t) = y0
(
ωωn
)2
Sen (ω t− φ)√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
+ y0 Senω t
= y0
(
ωωn
)2
[Senω tCos φ− Cosω t Senφ]√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
+ y0 Senω t
= y0
(
ωωn
)2[
1−(
ωωn
)2]
Senω t−[
2 ccc
(
ωωn
)3]
Cosω t
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
+ y0 Senω t
= y0
{
(
ωωn
)2[
1−(
ωωn
)2]
+
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
}
Senω t−[
2 ccc
(
ωωn
)3]
Cosω t
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
= y0
{[
1−(
ωωn
)2] [
(
ωωn
)2
+ 1−(
ωωn
)2]
+(
2 ccc
ωωn
)2}
Senω t−[
2 ccc
(
ωωn
)3]
Cosω t
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
= y0
{[
1−(
ωωn
)2]
+(
2 ccc
ωωn
)2}
Senω t−[
2 ccc
(
ωωn
)3]
Cosω t
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
(44)
Por lo tanto, el movimiento absoluto de la base, x(t) esta dada por
x(t) = x0 Sen (ω t− ψ) , (45)
donde, el angulo de fase ψ esta dado por
Tanψ =2 c
cc
(
ωωn
)3
[
1−(
ωωn
)2]
+(
2 ccc
ωωn
)2. (46)
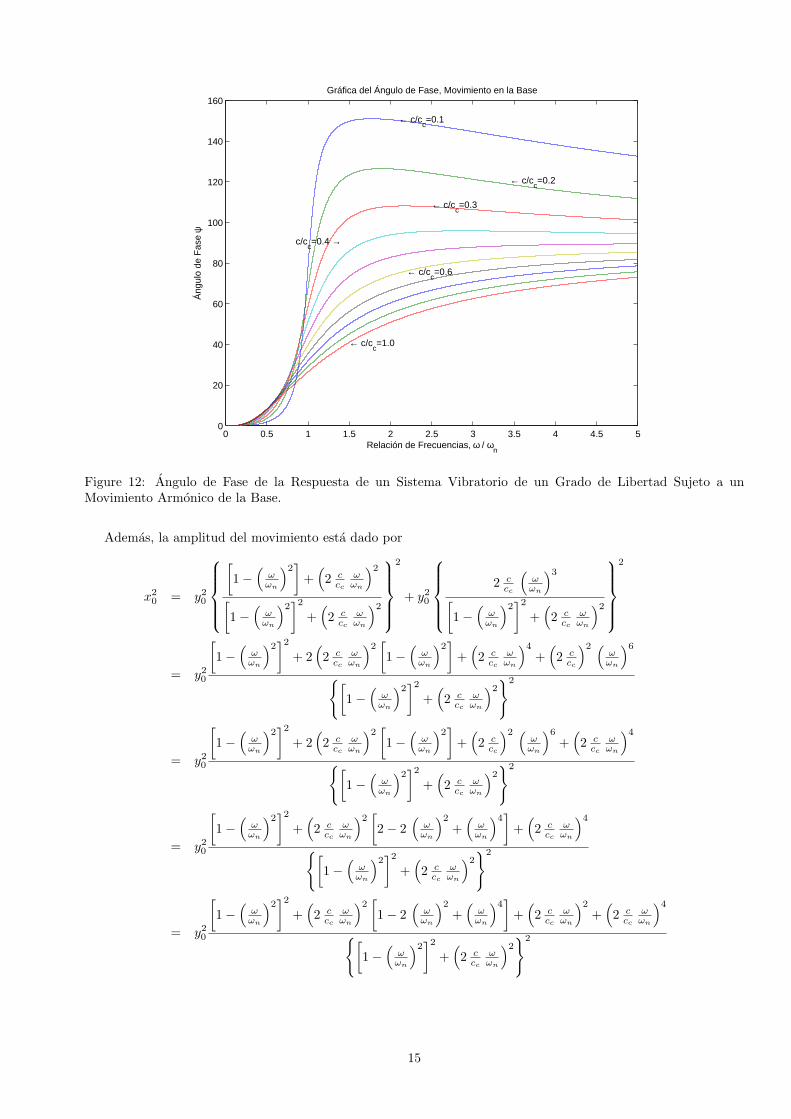
Una grafica del angulo de fase, ψ, como funcion de la relacion de amortiguamiento, ccc, y de la relacion de la
frecuencia de excitacion a la frecuencia natural del sistema vibratorio, ωωn
se muestra en la figura 12.
3La determinacion del movimiento absoluto x(t), requiere la adicion de dos funciones armonicas de la misma frecuencia, los detallesde este procedimiento se presentan en el Apendice C.
14
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
20
40
60
80
100
120
140
160
Relación de Frecuencias, ω / ωn
Áng
ulo
de F
ase
ψ
Gráfica del Ángulo de Fase, Movimiento en la Base
← c/cc=0.1
← c/cc=0.2
← c/cc=0.3
c/cc=0.4 →
← c/cc=0.6
← c/cc=1.0
Figure 12: Angulo de Fase de la Respuesta de un Sistema Vibratorio de un Grado de Libertad Sujeto a unMovimiento Armonico de la Base.
Ademas, la amplitud del movimiento esta dado por
x20
= y20
[
1−(
ωωn
)2]
+(
2 ccc
ωωn
)2
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
2
+ y20
2 ccc
(
ωωn
)3
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
2
= y20
[
1−(
ωωn
)2]2
+ 2(
2 ccc
ωωn
)2[
1−(
ωωn
)2]
+(
2 ccc
ωωn
)4
+(
2 ccc
)2 (
ωωn
)6
{
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
}2
= y20
[
1−(
ωωn
)2]2
+ 2(
2 ccc
ωωn
)2[
1−(
ωωn
)2]
+(
2 ccc
)2 (
ωωn
)6
+(
2 ccc
ωωn
)4
{
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
}2
= y20
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2[
2− 2(
ωωn
)2
+(
ωωn
)4]
+(
2 ccc
ωωn
)4
{
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
}2
= y20
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2[
1− 2(
ωωn
)2
+(
ωωn
)4]
+(
2 ccc
ωωn
)2
+(
2 ccc
ωωn
)4
{
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
}2
15

= y20
[
1−(
ωωn
)2]2 [
1 +(
2 ccc
ωωn
)2]
+(
2 ccc
ωωn
)2[
1 +(
2 ccc
ωωn
)2]
{
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
}2
= y20
{
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
}
[
1 +(
2 ccc
ωωn
)2]
{
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
}2= y2
0
1 +(
2 ccc
ωωn
)2
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
(47)
Por lo que, finalmente, se tiene que
x0 = y0
√
√
√
√
√
√
√
1 +(
2 ccc
ωωn
)2
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
(48)
Es importante senalar que evaluando la primera y segunda derivada, con respecto al tiempo, del movimientode la base, vea la ecuacion (33), se tiene que
d y(t)
d t= y0 ω Cos(ω t) y
d2 y(t)
d t2= −y0 ω2 Sen(ω t). (49)
De manera semejante, si se evaluan la primera y segunda derivada, con respecto al tiempo, del movimientoabsoluto de la masa M , vea la ecuacion (45), se tiene que
d x(t)
d t= x0 ω Cos (ω t− ψ) y
d2 x(t)
d t2= −x0 ω2 Sen (ω t− ψ) (50)
De manera que las relaciones entre las magnitudes del desplazamiento, velocidad y aceleracion del movimientoabsoluto de la masa respecto a las magnitudes del desplazamiento, velocidad y aceleracion del movimiento de labase, estan dadas por
x0y0
=x0 ω
y0 ω=x0 ω
2
y0 ω2=
√
√
√
√
√
√
√
1 +(
2 ccc
ωωn
)2
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
(51)
Una grafica de la relacion de amplitudes x0
y0
como funcion de la relacion de amortiguamiento, ccc, y de la relacion
de la frecuencia de excitacion a la frecuencia natural del sistema vibratorio, ωωn
se muestra en la figura 13.
5 Transmisibilidad
En esta seccion, se mostrara la definicion del concepto de transmisibilidad, denotado por TR, uno de los conceptosmas importantes para la practica del aislamiento pasivo de vibraciones. Este concepto tiene una definicion dual, enuna primera version, la transmisibilidad se define como la relacion entre la amplitud del movimiento de un sistemavibratorio, x0, respecto a la amplitud del movimiento de la base que excita el sistema, y0. Es decir
TR ≡ x0y0. (52)
Sin embargo, por los resultados de la seccion 4, vea la ecuacion (51), esta definicion puede extenderse a la relacionentre las magnitudes de las velocidades o a la relacion entre las magnitudes de las aceleraciones correspondentes yesta dada por
TR ≡ x0y0
=x0 ω
y0 ω=x0 ω
2
y0 ω2=
√
√
√
√
√
√
√
1 +(
2 ccc
ωωn
)2
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
. (53)
16
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
1
2
3
4
5
6
Relación de Frecuencias, ω / ωn
Tra
nsm
isib
ilida
d T r =
Ft/F
0 = x
0/y0
Gráfica de la Transmisibilidad
← c/cc=0.1
← c/cc=0.2
← c/cc=0.3
← c/cc=0.4
← c/cc=1.0
← c/cc=0.6
← c/cc=0.8
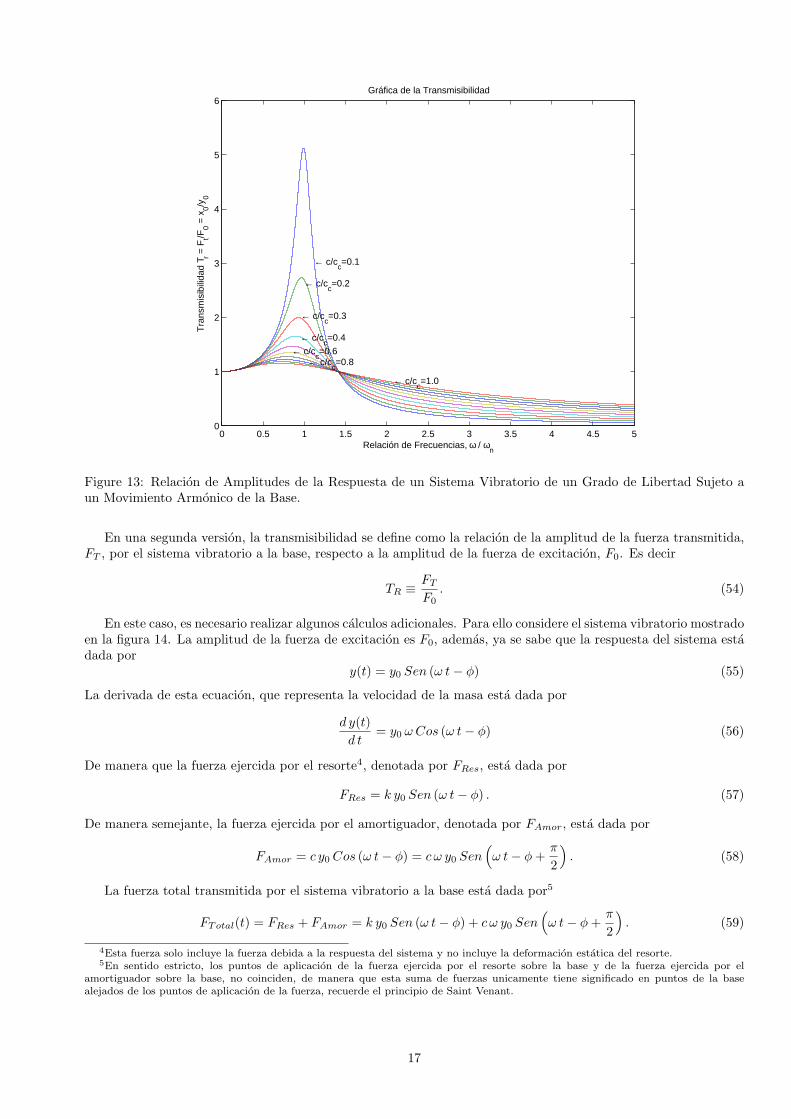
Figure 13: Relacion de Amplitudes de la Respuesta de un Sistema Vibratorio de un Grado de Libertad Sujeto aun Movimiento Armonico de la Base.
En una segunda version, la transmisibilidad se define como la relacion de la amplitud de la fuerza transmitida,FT , por el sistema vibratorio a la base, respecto a la amplitud de la fuerza de excitacion, F0. Es decir
TR ≡ FT
F0
. (54)
En este caso, es necesario realizar algunos calculos adicionales. Para ello considere el sistema vibratorio mostradoen la figura 14. La amplitud de la fuerza de excitacion es F0, ademas, ya se sabe que la respuesta del sistema estadada por
y(t) = y0 Sen (ω t− φ) (55)
La derivada de esta ecuacion, que representa la velocidad de la masa esta dada por
d y(t)
d t= y0 ω Cos (ω t− φ) (56)
De manera que la fuerza ejercida por el resorte4, denotada por FRes, esta dada por
FRes = k y0 Sen (ω t− φ) . (57)
De manera semejante, la fuerza ejercida por el amortiguador, denotada por FAmor, esta dada por
FAmor = c y0 Cos (ω t− φ) = c ω y0 Sen(
ω t− φ+π
2
)
. (58)
La fuerza total transmitida por el sistema vibratorio a la base esta dada por5
FTotal(t) = FRes + FAmor = k y0 Sen (ω t− φ) + c ω y0 Sen(
ω t− φ+π
2
)
. (59)
4Esta fuerza solo incluye la fuerza debida a la respuesta del sistema y no incluye la deformacion estatica del resorte.5En sentido estricto, los puntos de aplicacion de la fuerza ejercida por el resorte sobre la base y de la fuerza ejercida por el
amortiguador sobre la base, no coinciden, de manera que esta suma de fuerzas unicamente tiene significado en puntos de la basealejados de los puntos de aplicacion de la fuerza, recuerde el principio de Saint Venant.
17

Figure 14: Sistema Vibratorio de un Grado de Libertad Sujeto a Vibracion Forzada con una Fuerza de Excitacionde Amplitud Constante.
Debe notarse que las componentes del lado derecho de la ecuacion estan desfasadas 90◦; por lo tanto, del apendiceC, se tiene que la amplitud de la fuerza total transmitida, denotada por FT , esta dada por
FT =
√
(k y0)2+ (c y0 ω)
2= y0
√
(k)2+ (c ω)
2= y0 k
√
1 +(c ω
k
)2
= y0 k
√
1 +
(
2c
cc
ω
ωn
)2
Sustituyendo el valor de y0, la amplitud del estado permanente o estacionario, de la respuesta del sistemavibratorio, ecuacion (13), reproducida a continuacion
y0δ0
=1
√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
o
y0 =δ0
√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
=F0
k√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
Por lo tanto, la fuerza transmitida esta dada por
FT =F0
k√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
k
√
1 +
(
2c
cc
ω
ωn
)2
= F0
√
√
√
√
√
√
√
1 +(
2 ccc
ωωn
)2
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
(60)
Por lo tanto, la primera version de la transmisibilidad esta dada por
TR =FT
F0
=
√
√
√
√
√
√
√
1 +(
2 ccc
ωωn
)2
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
. (61)
Concluyendo, la transmisibilidad tiene multiples interpretaciones y una misma ecuacion, dadas por
TR =x0y0
=x0 ω
y0 ω=x0 ω
2
y0 ω2=FT
F0
=
√
√
√
√
√
√
√
1 +(
2 ccc
ωωn
)2
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
. (62)
Esta ecuacion de la transmisibilidad es la misma dada por la ecuacion (51) y la grafica de la transmisibilidadcomo funcion de la relacion de amortiguamiento, c
cc, y de la relacion de la frecuencia de excitacion a la frecuencia
natural del sistema vibratorio, ωωn
se muestra en la figura 13.
18
6 Simulacion de sistemas vibratorios de un grado de libertad sujetos
a vibracion forzada
Para propositos de simulacion, conviene escribir la ecuacion de movimiento del sistema como
d2y
dt2= − c
M
dy
dt− k
My +
F0
MSenωt.
Es bien sabido que la solucion general, yG(t), de la ecuacion diferencial esta dada por
yG(t) = yH(t) + yP (t),
donde, yH(t) es la solucion general de la ecuacion homogenea asociada. Fisicamente, yH(t) representa una vibraciontransitoria que desaparece con una velocidad proporcional al amortiguamiento del sistema. Por otro lado, yP (t)es una solucion particular de la ecuacion no homogenea. Fisicamente, yP (t) representa una vibracion permamenteque, usualmente, es el objetivo principal del analisis. Esta vibracion permanente esta dada por
yP (t) = y0Sen(ωt+ φ),
donde, y0 es la amplitud de la vibracion forzada y φ es el angulo de fase de esta vibracion respecto a la fuerza deexcitacion.
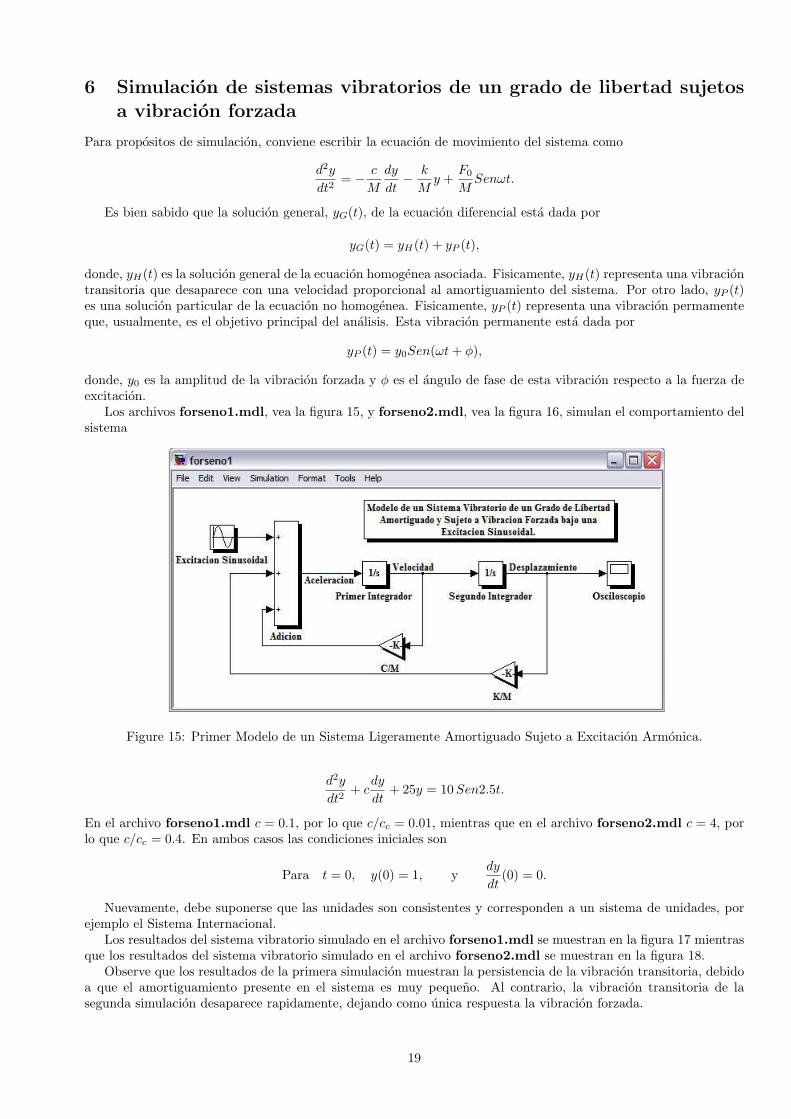
Los archivos forseno1.mdl, vea la figura 15, y forseno2.mdl, vea la figura 16, simulan el comportamiento delsistema
Figure 15: Primer Modelo de un Sistema Ligeramente Amortiguado Sujeto a Excitacion Armonica.
d2y
dt2+ c
dy
dt+ 25y = 10Sen2.5t.
En el archivo forseno1.mdl c = 0.1, por lo que c/cc = 0.01, mientras que en el archivo forseno2.mdl c = 4, porlo que c/cc = 0.4. En ambos casos las condiciones iniciales son
Para t = 0, y(0) = 1, ydy
dt(0) = 0.
Nuevamente, debe suponerse que las unidades son consistentes y corresponden a un sistema de unidades, porejemplo el Sistema Internacional.
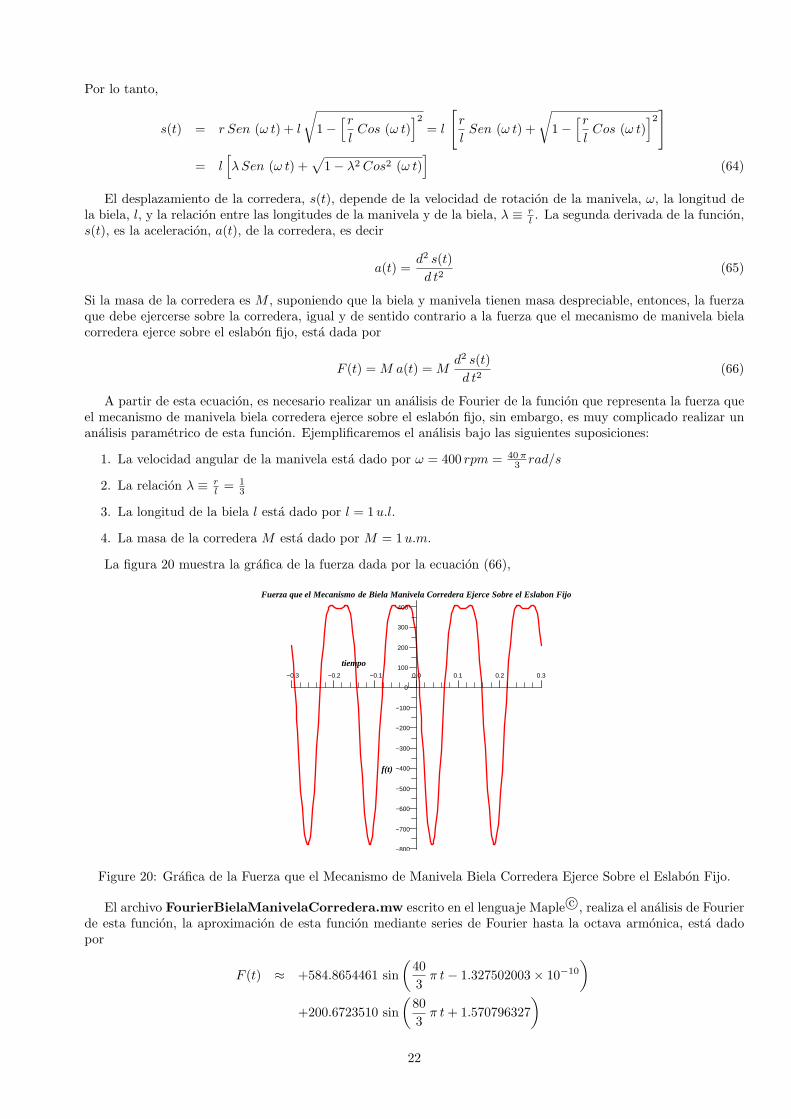
Los resultados del sistema vibratorio simulado en el archivo forseno1.mdl se muestran en la figura 17 mientrasque los resultados del sistema vibratorio simulado en el archivo forseno2.mdl se muestran en la figura 18.
Observe que los resultados de la primera simulacion muestran la persistencia de la vibracion transitoria, debidoa que el amortiguamiento presente en el sistema es muy pequeno. Al contrario, la vibracion transitoria de lasegunda simulacion desaparece rapidamente, dejando como unica respuesta la vibracion forzada.
19
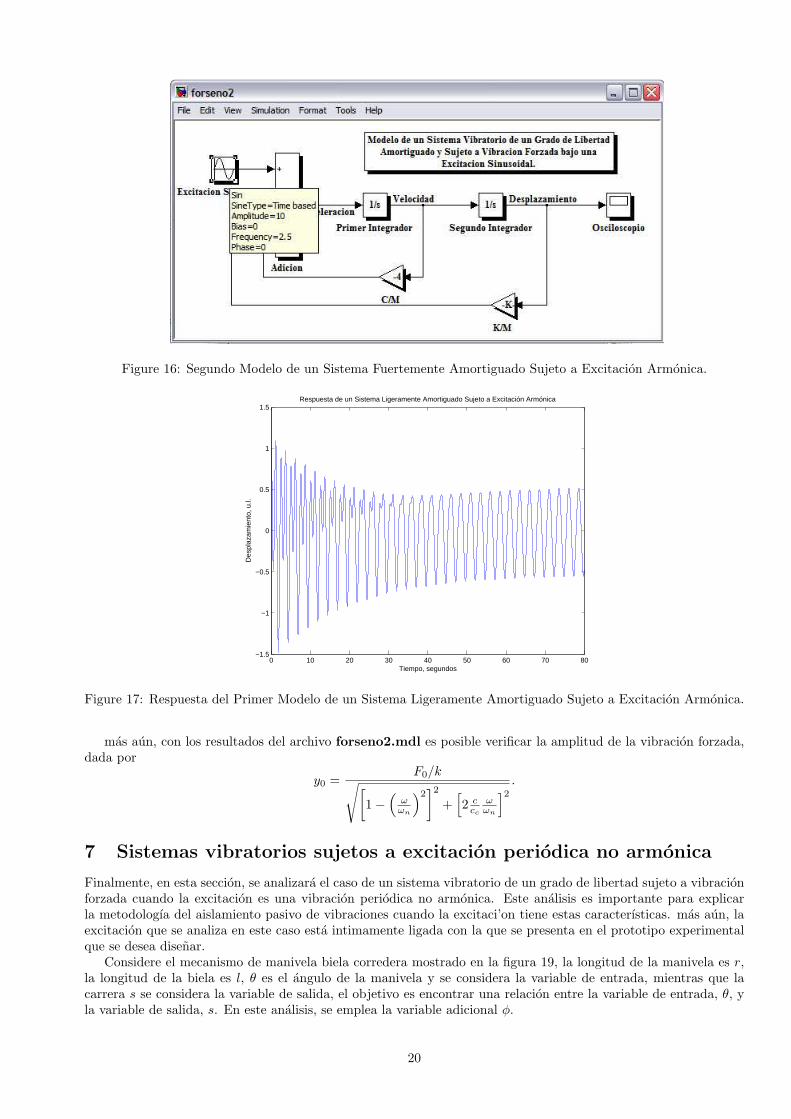
Figure 16: Segundo Modelo de un Sistema Fuertemente Amortiguado Sujeto a Excitacion Armonica.
0 10 20 30 40 50 60 70 80−1.5
−1
−0.5
0
0.5
1
1.5
Tiempo, segundos
Des
plaz
amie
nto,
u.l.
Respuesta de un Sistema Ligeramente Amortiguado Sujeto a Excitación Armónica
Figure 17: Respuesta del Primer Modelo de un Sistema Ligeramente Amortiguado Sujeto a Excitacion Armonica.
mas aun, con los resultados del archivo forseno2.mdl es posible verificar la amplitud de la vibracion forzada,dada por
y0 =F0/k
√
[
1−(
ωωn
)2]2
+[
2 ccc
ωωn
]2
.
7 Sistemas vibratorios sujetos a excitacion periodica no armonica
Finalmente, en esta seccion, se analizara el caso de un sistema vibratorio de un grado de libertad sujeto a vibracionforzada cuando la excitacion es una vibracion periodica no armonica. Este analisis es importante para explicarla metodologıa del aislamiento pasivo de vibraciones cuando la excitaci’on tiene estas caracterısticas. mas aun, laexcitacion que se analiza en este caso esta intimamente ligada con la que se presenta en el prototipo experimentalque se desea disenar.
Considere el mecanismo de manivela biela corredera mostrado en la figura 19, la longitud de la manivela es r,la longitud de la biela es l, θ es el angulo de la manivela y se considera la variable de entrada, mientras que lacarrera s se considera la variable de salida, el objetivo es encontrar una relacion entre la variable de entrada, θ, yla variable de salida, s. En este analisis, se emplea la variable adicional φ.
20

0 10 20 30 40 50 60 70 80−0.5
0
0.5
1
Tiempo, segundos
Des
plaz
amie
nto,
u.l.
Respuesta de un Sistema Fuertemente Amortiguado Sujeto a Excitación Armónica
Figure 18: Respuesta del Segundo Modelo de un Sistema Fuertemente Amortiguado Sujeto a Excitacion Armonica.
Figure 19: Mecanismo de Manivela Biela Corredera.
De la figura, es facil observar que la carrera s esta dada por
s(θ) = r Sen θ + l Cos φ.
sin embargo, los angulos θ y φ estan relacionados por la ecuacion
r Cos θ = l Senφ, por lo que Senφ =r
lCos θ
Sustituyendo este resultado y aplicando la identidad trigonometrica correspondiente, se tiene que
s(θ) = r Sen θ + l
√
1−(r
lCos θ
)2
(63)
En general, el angulo de entrada θ es una funcion del tiempo, donde
d θ
d t= ω y
d2 θ
d t2= ω = α.
mas aun, se supondra que la manivela gira a velocidad angular constante, de manera que
d2 θ
d t2= ω = α = 0.
21
Por lo tanto,
s(t) = r Sen (ω t) + l
√
1−[r
lCos (ω t)
]2
= l
[
r
lSen (ω t) +
√
1−[r
lCos (ω t)
]2
]
= l[
λSen (ω t) +√
1− λ2 Cos2 (ω t)]
(64)
El desplazamiento de la corredera, s(t), depende de la velocidad de rotacion de la manivela, ω, la longitud dela biela, l, y la relacion entre las longitudes de la manivela y de la biela, λ ≡ r
l. La segunda derivada de la funcion,
s(t), es la aceleracion, a(t), de la corredera, es decir
a(t) =d2 s(t)
d t2(65)
Si la masa de la corredera es M , suponiendo que la biela y manivela tienen masa despreciable, entonces, la fuerzaque debe ejercerse sobre la corredera, igual y de sentido contrario a la fuerza que el mecanismo de manivela bielacorredera ejerce sobre el eslabon fijo, esta dada por
F (t) =M a(t) =Md2 s(t)
d t2(66)
A partir de esta ecuacion, es necesario realizar un analisis de Fourier de la funcion que representa la fuerza queel mecanismo de manivela biela corredera ejerce sobre el eslabon fijo, sin embargo, es muy complicado realizar unanalisis parametrico de esta funcion. Ejemplificaremos el analisis bajo las siguientes suposiciones:
1. La velocidad angular de la manivela esta dado por ω = 400 rpm = 40π3rad/s
2. La relacion λ ≡ rl= 1
3
3. La longitud de la biela l esta dado por l = 1u.l.
4. La masa de la corredera M esta dado por M = 1u.m.
La figura 20 muestra la grafica de la fuerza dada por la ecuacion (66),
400
200
0
f(t) −400
−600
−800
300
100
−100
−200
−300
−500
−700
0.30.20.10.0−0.1−0.2−0.3
tiempo
Fuerza que el Mecanismo de Biela Manivela Corredera Ejerce Sobre el Eslabon Fijo
Figure 20: Grafica de la Fuerza que el Mecanismo de Manivela Biela Corredera Ejerce Sobre el Eslabon Fijo.
El archivo FourierBielaManivelaCorredera.mw escrito en el lenguaje Maple c©, realiza el analisis de Fourierde esta funcion, la aproximacion de esta funcion mediante series de Fourier hasta la octava armonica, esta dadopor
F (t) ≈ +584.8654461 sin
(
40
3π t− 1.327502003× 10−10
)
+200.6723510 sin
(
80
3π t+ 1.570796327
)
22

+2.025883675× 10−7 sin (40π t− 1.218977492)
+5.906602484 sin
(
160
3π t+ 1.570796317
)
+7.764105558× 10−8 sin
(
200
3π t− 1.570795993
)
+0.1955976576 sin (80π t+ 1.570796167)
+4.797051567× 10−8 sin
(
280
3π t− 1.325796371
)
+0.006397312193 sin
(
320
3π t+ 1.570794943
)
(67)
Es importante notar que la relacion entre la amplitud de la segunda armonica respecto a la amplitud de laprimera armonica esta dado por
200.6723510
584.8654461= 0.343
y las restantes relaciones entre las magnitudes del resto de las armonicas respecto a la amplitud de la primeraarmonica son despreciables. Ademas, la frecuencia de las armonicas superiores es el multiplo correspon-
diente de la primera armonica. La figura 21 muestra el espectro de Fourier de la funcion desplazamiento dela corredera de un mecanismo de manivela biela corredera. Es importante senalar que unicamente la primera,segunda y cuarta armonica se alcanzan a distinguir.
400
200
0
Armónica
108642 119
cn
7531
Espectro de Fourier
Figure 21: Espectro de Fourier de la Fuerza que el Mecanismo de Manivela Biela Corredera Ejerce Sobre el EslabonFijo.
8 Aplicaciones
En esta seccion se presentaran las aplicaciones mas comunes de los analisis de sistemas de un grado de libertadsujeto a vibraciones forzadas. Esas dos aplicaciones son: Aislamiento de vibraciones e instrumentos de medicionde vibraciones.
8.1 Aislamiento de vibraciones
En esta seccion se presentaran los fundamentos necesarios para el diseno de sistemas de aislamiento de vibraciones.Existen dos tareas en el aislamiento de vibraciones
1. Aislamiento de la fuerza transmitida por una maquina que produce fuerzas vibratorias a su base.
23
2. Aislamiento del movimiento que aparece en un medio ambiente a los instrumentos o dispositivos conectadosde alguna manera al medio ambiente.
El fundamento del diseno de sistemas de aislamiento de vibraciones es comun y se basa en el concepto detransmisibilidad, dada por la ecuacion (62) y repetida aquı
TR =x0y0
=x0 ω
y0 ω=x0 ω
2
y0 ω2=FT
F0
=
√
√
√
√
√
√
√
1 +(
2 ccc
ωωn
)2
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
.
La ecuacion (62) muestra la multiplicidad de interpretaciones que puede tener el concepto de transmisibilidad.Puede representar la relacion entre las amplitudes de la aceleracion, x0 ω
2, velocidad, x0 ω, y del movimiento, x0,sufrido por un dispositivo con respecto a las amplitudes de la aceleracion, y0 ω
2, velocidad, y0 ω, y del movimiento,y0, que experimenta la base; similarmente puede representar la relacion entre las magnitudes de la fuerza, armonica,transmitida a la base, FT con respecto a la fuerza, igualmente armonica, producida por la maquina, F0. Esa relaciondepende de la relacion de amortiguamiento, ξ = c
cc, y la relacion de velocidades angulares, ω
ωn.
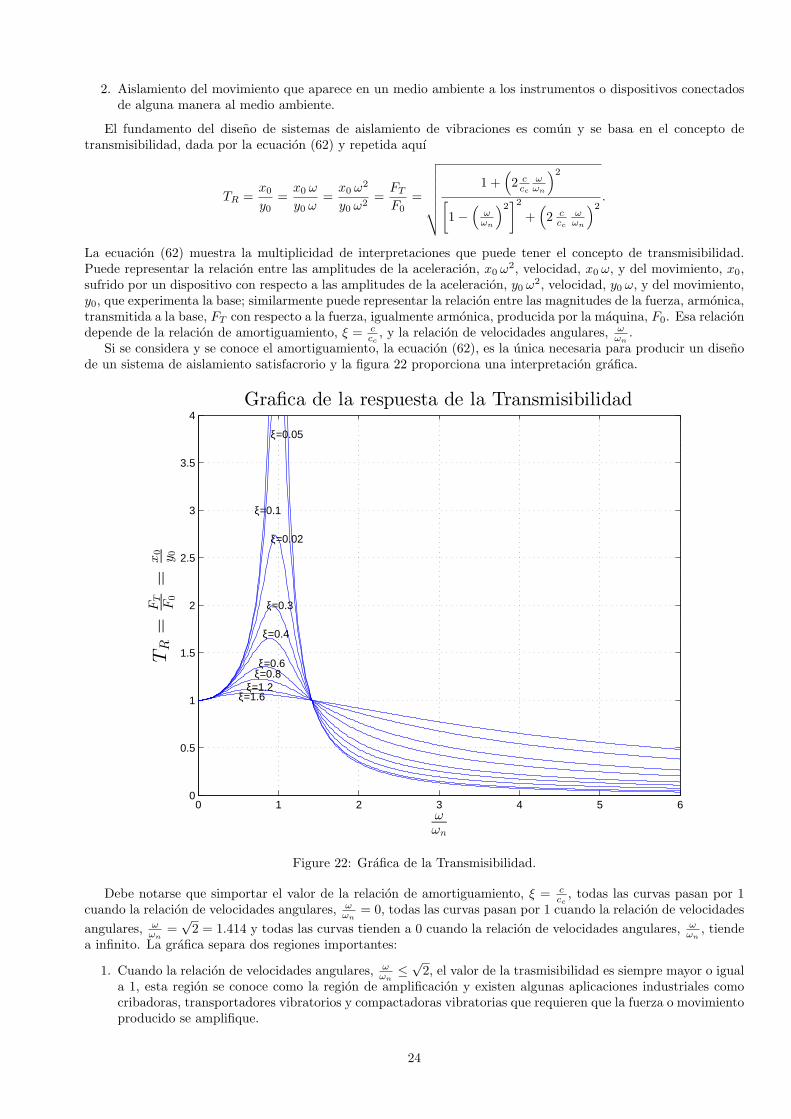
Si se considera y se conoce el amortiguamiento, la ecuacion (62), es la unica necesaria para producir un disenode un sistema de aislamiento satisfacrorio y la figura 22 proporciona una interpretacion grafica.
0 1 2 3 4 5 60
0.5
1
1.5
2
2.5
3
3.5
4
TR=
FT
F0=
x0
y0
ωωn
Grafica de la respuesta de la Transmisibilidad
ξ=0.05
ξ=0.1
ξ=0.02
ξ=0.3
ξ=0.4
ξ=0.6ξ=0.8
ξ=1.2ξ=1.6
Figure 22: Grafica de la Transmisibilidad.
Debe notarse que simportar el valor de la relacion de amortiguamiento, ξ = ccc, todas las curvas pasan por 1
cuando la relacion de velocidades angulares, ωωn
= 0, todas las curvas pasan por 1 cuando la relacion de velocidades
angulares, ωωn
=√2 = 1.414 y todas las curvas tienden a 0 cuando la relacion de velocidades angulares, ω
ωn, tiende
a infinito. La grafica separa dos regiones importantes:
1. Cuando la relacion de velocidades angulares, ωωn
≤√2, el valor de la trasmisibilidad es siempre mayor o igual
a 1, esta region se conoce como la region de amplificacion y existen algunas aplicaciones industriales comocribadoras, transportadores vibratorios y compactadoras vibratorias que requieren que la fuerza o movimientoproducido se amplifique.
24

2. Cuando la relacion de velocidades angulares, ωωn
>√2, el valor de la trasmisibilidad es siempre menor a
1, esta es la region en la que se lleva a cabo el aislamiento de vibraciones. Es importante senalar que unaislamiento efectivo requiere usualmente que ω
ωn> 4
Debe notarse que mientras mas pequena sea la relacion de amortiguamientom, ξ = ccc, mas rapida es la
convergencia del valor de la transmisibilidad TR a cero, cuando la relacion de velocidades angulares, ωωn
, tiende ainfinito. Este resultado puede llevar a la erronea conclusion de que el amortiguamiento es indeseable, esta conclusionno es correcta pues para llegar a la region de operacion de un diseno de aislamiento de vibraciones, la relacionde velocidades angulares, ω
ωn>
√2, por lo que debe pasar por la region de resonancia ω
ωn= 1 y en esa region se
requiere de una relacion de amortiguamiento pequena para evitar que las amplitudes sean muy elevadas.En la practica de diseno de aislamiento de vibraciones frecuentemente se desprecia el amortiguamiento presente
en el sistema —recuerde que el amortiguamiento es una variable muy difıcil de modelar y cuantificar— y se realizanlos calculos bajo la suposicion de que ξ = c
cc= 0, en este caso la ecuacion (62) se reduce a
TR =x0y0
=x0 ω
y0 ω=x0 ω
2
y0 ω2=FT
F0
=
√
√
√
√
√
√
√
1 +(
2 ccc
ωωn
)2
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
=
√
√
√
√
√
1 + 02[
1−(
ωωn
)2]2
+ 02
=1
∣
∣
∣
∣
1−(
ωωn
)2∣
∣
∣
∣
(68)
Es importante reconocer que la raiz cuadrada de un termino elevado al cuadrado es el valor absoluto
del termino. De manera que la ecuacion de diseno es ahora
TR =x0y0
=x0 ω
y0 ω=x0 ω
2
y0 ω2=FT
F0
=1
∣
∣
∣
∣
1−(
ωωn
)2∣
∣
∣
∣
Mas aun, si el objetivo es el diseno de aislamiento de vibraciones, entonces se tiene que forzosamente ωωn
>√2 y
por lo tanto(
ωωn
)2
> 1 de manera que, en todos los casos de amortiguamiento —si se desea amplificar la fuerza o
la vibracion existen siempre dos soluciones tales que(
ωωn
)2
<√2 — se tiene que
TR =x0y0
=x0 ω
y0 ω=x0 ω
2
y0 ω2=FT
F0
=1
(
ωωn
)2
− 1
8.2 Instrumentos de medicion de vibraciones.
Existen tres importantes tipos de instrumentos de medicion de vibraciones:
1. Frecuencımetro. Este instrumento determina la frecuencia de la vibracion, el tipo mas conocido como elfrecuencımetro de lenguetas o de Frahm. Este instrumento consiste en un conjunto de lenguetas o canas delmismo material y de diferente longitud y, por lo tanto, de diferente frecuencia natural, calibrada para cadauna de las lenguetas, de manera que la lengueta o lenguetas que estan en resonancia, son las que determinanla frecuencia de la vibracion que se desea medir. Una imagen de este tipo de instrumentos se muestra en lafigura 23.
2. Vibrometro, velocımetro o sismometro. Este es un instrumento de muy baja frecuencia natural, desafortu-nadamente la masa es usualmente grande, de manera que su rango de aplicacion es limitado, sin embargo suuso fue muy generalizado entre 1940 y 1980. Una imagen de este instrumento se muestra en la figura 24
En el interior de la carcaza se encuentra una masa, de material ferromagnetico, soportada por un resorte y,en su caso un amortiguador de manera que la relacion de amortiguamiento c
cces pequena —menor a 0.2.
Unida a la carcaza del sismometro se colocan bobinas que al moverse en relacion a la masa producen unvoltaje proporcional a la velocidad relativa de la masa respecto a su carcaza y por lo tanto proporcional a lavelocidad del movimiento de la superficie sobre la que se monta rıgidamente el sismometro.
25
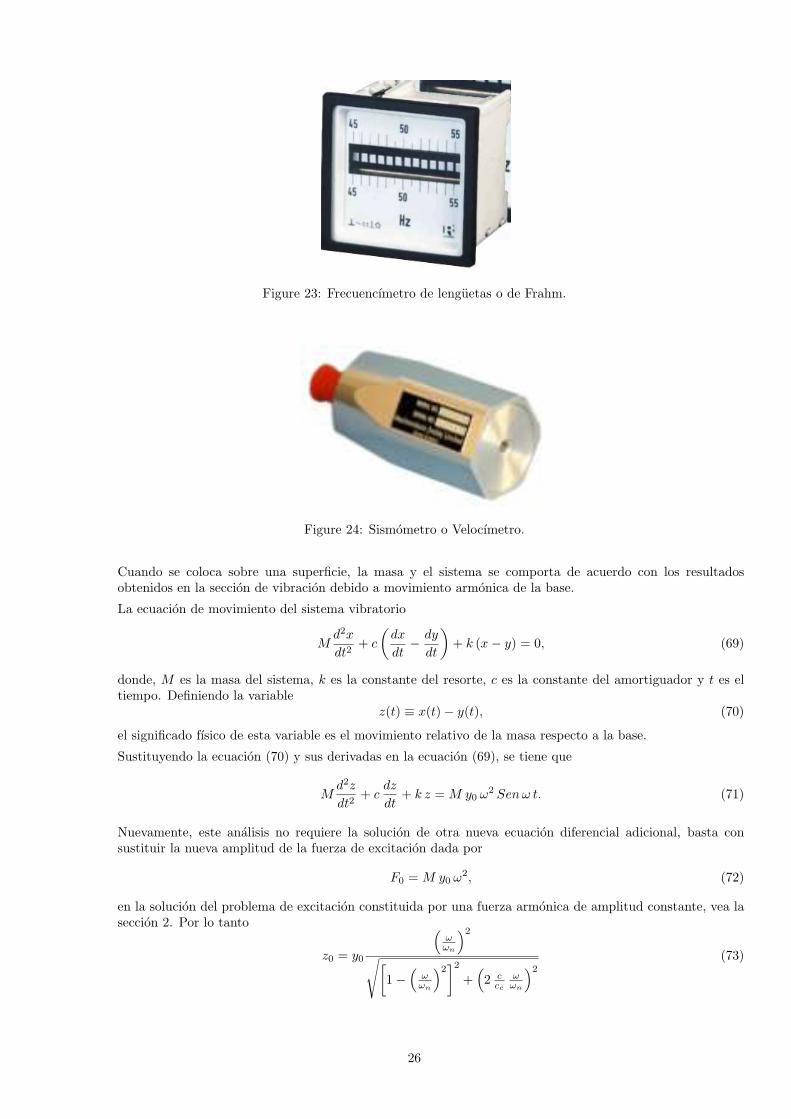
Figure 23: Frecuencımetro de lenguetas o de Frahm.
Figure 24: Sismometro o Velocımetro.
Cuando se coloca sobre una superficie, la masa y el sistema se comporta de acuerdo con los resultadosobtenidos en la seccion de vibracion debido a movimiento armonica de la base.
La ecuacion de movimiento del sistema vibratorio
Md2x
dt2+ c
(
dx
dt− dy
dt
)
+ k (x− y) = 0, (69)
donde, M es la masa del sistema, k es la constante del resorte, c es la constante del amortiguador y t es eltiempo. Definiendo la variable
z(t) ≡ x(t)− y(t), (70)
el significado fısico de esta variable es el movimiento relativo de la masa respecto a la base.
Sustituyendo la ecuacion (70) y sus derivadas en la ecuacion (69), se tiene que
Md2z
dt2+ c
dz
dt+ k z =M y0 ω
2 Senω t. (71)
Nuevamente, este analisis no requiere la solucion de otra nueva ecuacion diferencial adicional, basta consustituir la nueva amplitud de la fuerza de excitacion dada por
F0 =M y0 ω2, (72)
en la solucion del problema de excitacion constituida por una fuerza armonica de amplitud constante, vea laseccion 2. Por lo tanto
z0 = y0
(
ωωn
)2
√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
(73)
26
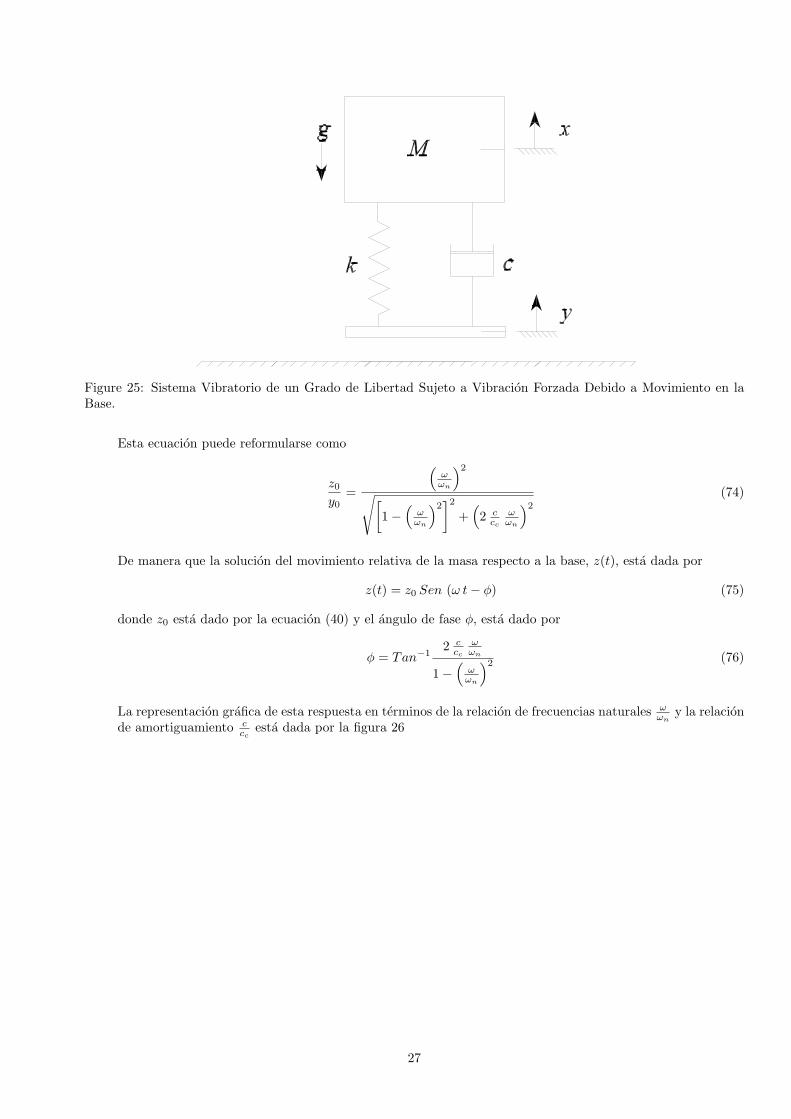
Figure 25: Sistema Vibratorio de un Grado de Libertad Sujeto a Vibracion Forzada Debido a Movimiento en laBase.
Esta ecuacion puede reformularse como
z0y0
=
(
ωωn
)2
√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
(74)
De manera que la solucion del movimiento relativa de la masa respecto a la base, z(t), esta dada por
z(t) = z0 Sen (ω t− φ) (75)
donde z0 esta dado por la ecuacion (40) y el angulo de fase φ, esta dado por
φ = Tan−12 c
cc
ωωn
1−(
ωωn
)2(76)
La representacion grafica de esta respuesta en terminos de la relacion de frecuencias naturales ωωn
y la relacionde amortiguamiento c
ccesta dada por la figura 26
27

0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
1
2
3
4
5
6
Relación de Frecuencias, ω / ωn
Par
ámet
ro A
dim
ensi
onal
, y0 M
/m e
Respuesta a una Fuerza Armónica de Magnitud Proporcional al Cuadrado de la Frecuencia
← c/cc=0.1
← c/cc=0.2
← c/cc=0.3
← c/cc=0.4
← c/cc=0.8
← c/cc=1.0
← c/cc=0.6
Figure 26: Relacion de amplitudes de la respuesta del movimiento relativo entre la masa y la base sujeta a unmovimiento armonico.
De manera semejante, la respuesta del angulo de fase en terminos de la relacion de frecuencias ωωn
y la relacionde amortiguamiento c
ccesta dada por la figura 27
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
20
40
60
80
100
120
140
160
180
Relación de Frecuencias, ω / ωn
Áng
ulo
de F
ase
φ
Gráfica del Ángulo de Fase
c/cc=0.1 →
c/cc=0.2 →
c/cc=0.3 →
← c/cc=0.4
← c/cc=0.6
← c/cc=1.0
Figure 27: Angulo de fase de la respuesta del movimiento relativo entre la masa y la base sujeta a un movimientoarmonico.
Primero se mostrara que, sin importar el valor de la relacion de amortiguamiento ccc, la relacion z0
y0
tiende auno cuando la relacion de frecuencias ω
ωntiende a infinito.
limωωn
→∞
z0y0
= limωωn
→∞
(
ωωn
)2
√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
= limωωn
→∞
1√
[
1
( ωωn
)2 − 1
]2
+(
2cccωωn
)2
=1
√
(0− 1)2+ 02
= 1 (77)
28
De manera semejante, es facil observando la figura 27, que sin importar el valor de la relacion de amor-tiguamiento c
cc, cuando ω
ωntiende a infinito, y mas rapidamente si la relacion de amortiguamiento c
cces
pequena, el angulo de fase φ tiende a 180◦ = π.
Por lo tanto, cuando ωωn
tiende a infinito,
z(t) = z0 Sen (ω t− φ) = y0 Sen (ω t− π)
Ademas, el movimiento absoluto de la masa, dentro del sismometro, esta dado por
x(t) = z(t)− y(t) = y0 Sen (ω t− π) + y0 Senω t = −y0 Senω t+ y0 Senω t = 0
La conclusion es que cuando ωωn
tiende a infinito la masa dentro del sismometro permanece estacionaria.
2.5 3 3.5 4 4.5 5 5.5 6 6.5 70.98
0.985
0.99
0.995
1
1.005
1.01
1.015
1.02
1.025
1.03
z0
y0
ωωn
Grafica de la respuesta de un sismometro
ξ=0.62
ξ=0.63
ξ=0.64
ξ=0.65
ξ=0.66
ξ=0.67
ξ=0.68
ξ=0.69
ξ=0.70
ξ=0.71
ξ=0.72
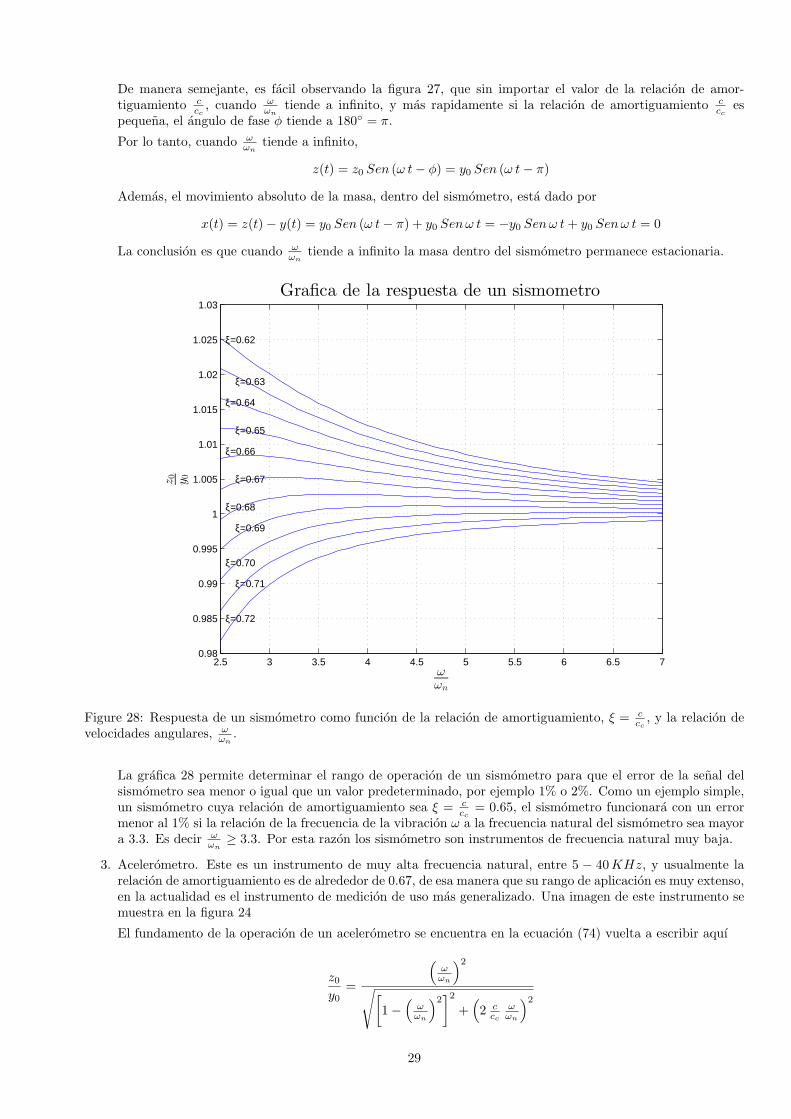
Figure 28: Respuesta de un sismometro como funcion de la relacion de amortiguamiento, ξ = ccc, y la relacion de
velocidades angulares, ωωn
.
La grafica 28 permite determinar el rango de operacion de un sismometro para que el error de la senal delsismometro sea menor o igual que un valor predeterminado, por ejemplo 1% o 2%. Como un ejemplo simple,un sismometro cuya relacion de amortiguamiento sea ξ = c
cc= 0.65, el sismometro funcionara con un error
menor al 1% si la relacion de la frecuencia de la vibracion ω a la frecuencia natural del sismometro sea mayora 3.3. Es decir ω
ωn≥ 3.3. Por esta razon los sismometro son instrumentos de frecuencia natural muy baja.
3. Acelerometro. Este es un instrumento de muy alta frecuencia natural, entre 5 − 40KHz, y usualmente larelacion de amortiguamiento es de alrededor de 0.67, de esa manera que su rango de aplicacion es muy extenso,en la actualidad es el instrumento de medicion de uso mas generalizado. Una imagen de este instrumento semuestra en la figura 24
El fundamento de la operacion de un acelerometro se encuentra en la ecuacion (74) vuelta a escribir aquı
z0y0
=
(
ωωn
)2
√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
29
Figure 29: Acelerometro.
La ecuacion puede reformularse como
z0 ω2
n
y0 ω2=
1√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
(78)
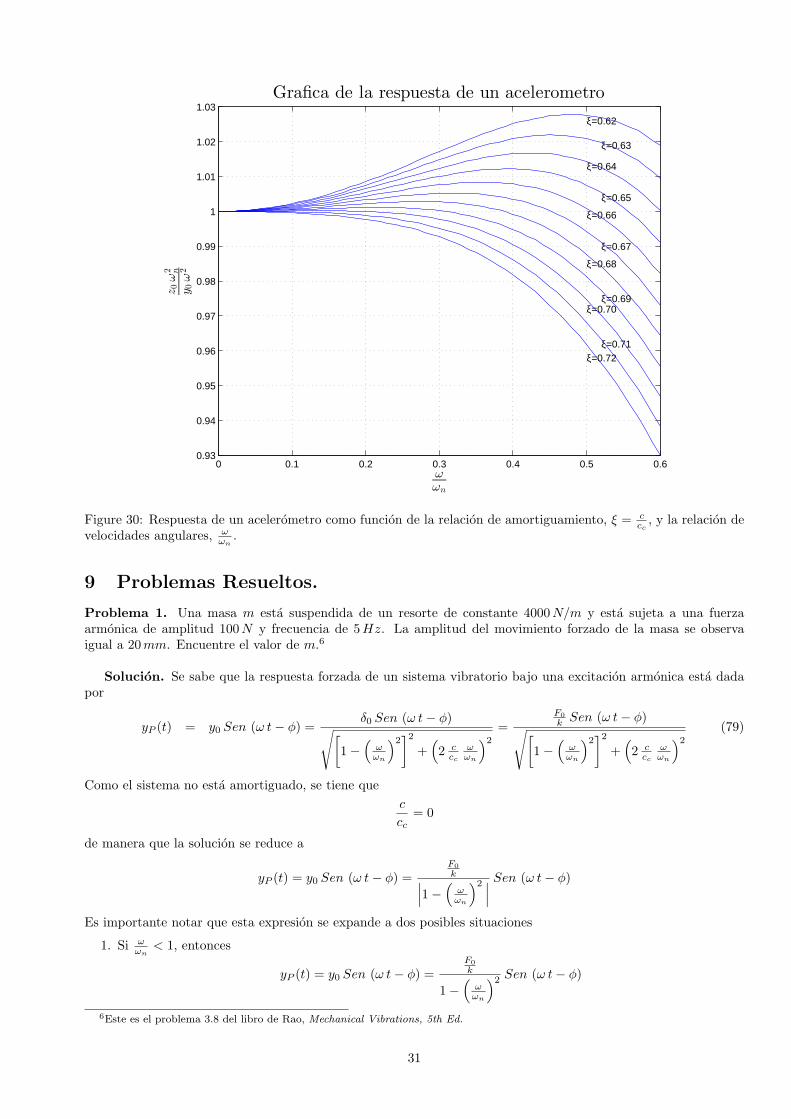
Debe notarse que y0 ω2 representa la aceleracion que se desea medir, mientras que ω2
n es una propiedad delacelerometro de manera que la respuesta del acelerometro depende del comportamiento del termino localizadoen el lado derecho de la ecuacion (78). Una grafica parcial de los resultados de la ecuacion (78) se presentaen la grafica 30. Esta grafica permite determinar el rango de operacion de un acelerometro para que el errorde la senal del acelerometro sea menor o igual que un valor predeterminado, por ejemplo 1% o 2%. Comoun ejemplo simple, un acelerometro cuya relacion de amortiguamiento sea ξ = c
cc= 0.66, el acelerometro
funcionara con un error menor al 1% si la relacion de la frecuencia de la vibracion ω a la frecuencia naturaldel sismometro sea menor a 0.57. Es decir ω
ωn≤ 0.57. Por esta razon los acelerometros son instrumentos de
frecuencia natural muy elevada.
30
0 0.1 0.2 0.3 0.4 0.5 0.60.93
0.94
0.95
0.96
0.97
0.98
0.99
1
1.01
1.02
1.03
z0ω2 n
y0ω2
ωωn
Grafica de la respuesta de un acelerometro
ξ=0.62
ξ=0.63
ξ=0.64
ξ=0.65
ξ=0.66
ξ=0.67
ξ=0.68
ξ=0.69ξ=0.70
ξ=0.71ξ=0.72
Figure 30: Respuesta de un acelerometro como funcion de la relacion de amortiguamiento, ξ = ccc, y la relacion de
velocidades angulares, ωωn
.
9 Problemas Resueltos.
Problema 1. Una masa m esta suspendida de un resorte de constante 4000N/m y esta sujeta a una fuerzaarmonica de amplitud 100N y frecuencia de 5Hz. La amplitud del movimiento forzado de la masa se observaigual a 20mm. Encuentre el valor de m.6
Solucion. Se sabe que la respuesta forzada de un sistema vibratorio bajo una excitacion armonica esta dadapor
yP (t) = y0 Sen (ω t− φ) =δ0 Sen (ω t− φ)
√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
=F0
kSen (ω t− φ)
√
[
1−(
ωωn
)2]2
+(
2 ccc
ωωn
)2
(79)
Como el sistema no esta amortiguado, se tiene que
c
cc= 0
de manera que la solucion se reduce a
yP (t) = y0 Sen (ω t− φ) =F0
k∣
∣
∣1−
(
ωωn
)2∣
∣
∣
Sen (ω t− φ)
Es importante notar que esta expresion se expande a dos posibles situaciones
1. Si ωωn
< 1, entonces
yP (t) = y0 Sen (ω t− φ) =F0
k
1−(
ωωn
)2Sen (ω t− φ)
6Este es el problema 3.8 del libro de Rao, Mechanical Vibrations, 5th Ed.
31

en cuyo caso φ = 0◦.
2. Si ωωn
> 1, entonces
yP (t) = y0 Sen (ω t− φ) =F0
k(
ωωn
)2
− 1Sen (ω t− φ)
en cuyo caso φ = 180◦.
Es importante senalar que en este problema, solamente la amplitud es importante; sin embargo, se presenta elangulo de fase para desarrollar completamente la solucion de la respuesta. Entonces, es necesario determinar encual de los dos posibles casos opera el sistema o en su caso analizar los dos posibles casos, sin embargo hay algunosdatos en comun
δ0 =F0
k=
100N
4000N/m= 0.025m = 25mm
Pero se sabe quey0 = 20mm
Por lo tantoy0δ0
=20mm
25mm= 0.8
Este resultado, indica que la respuesta del sistema es amortiguada y por lo tanto ωωn
> 1. Por lo tanto, se analizaraexclusivamente el segundo caso
y0δ0
=1
(
ωωn
)2
− 1
(
ω
ωn
)2
− 1 =1y0
δ0
ω
ωn
=
√
1 +1y0
δ0
ωn =ω
√
1 + 1y0δ0
Puesto queω = 5Hz = 31.4159 rad/s
se tiene que
ωn =31.4159 rad/s√
1 + 1
0.8
= 20.94393 rad/s
Finalmente, se sabe que
ωn =
√
k
mpor lo tanto m =
k
ω2n
y finalmente
m =4000N/m
(20.94393 rad/s)2=
4000 kgm/s2
438.6481/s2= 9.1189 kgm.
32


















