FAGOR AUTOMATION S.COOP Accionamientos … · acuedo con las instrucciones, ... Algunos caracteres...
117
FAGOR AUTOMATION S.COOP . Accionamientos Brushless AC ~ Serie MCP Innova ~ Ref.0910
Transcript of FAGOR AUTOMATION S.COOP Accionamientos … · acuedo con las instrucciones, ... Algunos caracteres...
FAGOR AUTOMATION S.COOP.
Accionamientos
Brushless AC
~ Serie MCP Innova ~
Ref.0910
Título Accionamientos Brushless AC. Serie MCPi.
Tipo de documentación Descripción, instalación y puesta en marcha de motores yreguladores posicionadores digitales de pequeñas dimen-siones.
Denominación MAN REGUL MCPi (CAS)
Referencia de manual Ref.0910
Software Versión 01.0xWinDDSSetup Versión 06.2x
Documento electrónico man_mcpi.pdf
Headquarters Fagor Automation S.Coop.Bº San Andrés 19, apdo. 144CP. 20500 - Arrasate - Mondragón
Guipúzcoa (Spain)
www.fagorautomation.com
+34 943 719200
+34 943 771118 (Servicio de Asistencia Técnica)
Exención de responsabilidad
La información descrita en este manual puede estar sujeta avariaciones motivadas por modificaciones técnicas. Fagor Au-tomation S. Coop. se reserva el derecho de modificar el con-tenido del manual, no estando obligado a notificar lasvariaciones.
El contenido de este manual y su validez ha sido contrastadopara el producto descrito. Aún así, no se garantiza la integri-dad, suficiencia o adecuación de la información técnica o deotro tipo facilitada en los manuales o en otra forma de docu-mentación.
Es posible la aparición de algún error involuntario y es por éstoque no se garantiza una coincidencia absoluta. No obstante,la información contenida en manuales y documentos, es com-probada regularmente procediéndose a realizar las correc-ciones necesarias y quedando incluidas en posterioresediciones.
Fagor Automation S. Coop. no se responsabilizará depérdidas o daños, directos, indirectos o fortuitos que puedanresultar de utilizar dicha información, quedando bajo respon-sabilidad del usuario el uso de la misma.
Quedan excluidas las reclamaciones de responsabilidad y ga-rantía por daños de transporte, uso indebido del equipo en en-tornos no adecuados y no conforme a la finalidad para la queha sido diseñado, incumplimiento de indicaciones de adver-tencias y seguridades descritas en este documento y/ó legalesaplicables al lugar de trabajo, modificaciones de software y/ó reparaciones por cuenta propia, catástrofes y daños cau-sados por la influencia próxima de otros aparatos cercanos.
Garantía
Las condiciones de garantía pueden ser solicitadas a su re-presentante de Fagor Automation S. Coop ó a través de lashabituales vías comerciales.
Marcas registradas
Son reconocidas todas las marcas registradas incluso las queno han sido señaladas. Las no señalizadas no son indicativasde que sean libres.
Octubre 2009 / Ref.0910
Reservados todos los derechos. Ninguna parte de esta do-cumentación puede reproducirse, transmitirse, transcribirse,almacenarse en un sistema de recuperación de datos o tra-ducirse a ningún idioma sin permiso expreso de Fagor Auto-mation S. Coop.
MCPi-2/112 Regulación AC Brushless digital - Ref.0910
GARANTÍAGARANTÍA INICIAL
Todo producto fabricado o comercializado por FAGOR tiene una garantía de12 meses para el usuario final.
Para que el tiempo que transcurre entre la salida de un producto desde nuestrosalmacenes hasta la llegada al usuario final no juegue en contra de estos 12 mesesde garantía, el fabricante o intermediario debe comunicar a FAGOR el destino, iden-tificación y fecha de instalación de la máquina a través de la Hoja de Garantía queacompaña a cada producto.
La fecha de comienzo de la garantía para el usuario será la que figura comofecha de instalación de la máquina en la hoja de garantía.
Este sistema nos permite asegurar los 12 meses de garantía al usuario.
FAGOR da un plazo de 12 meses al fabricante o intermediario para la instalación yventa del producto, de forma que la fecha de comienzo de garantía puede ser hastaun año posterior a la salida del producto de nuestros almacenes, siempre y cuandose nos haya remitido la hoja de garantía. Esto supone en la práctica la extensión dela garantía a dos años desde la salida del producto de los almacenes de Fagor. Encaso de que no se haya enviado la citada hoja, el período de garantía finalizará a los15 meses desde la salida del producto de nuestros almacenes.
FAGOR se compromete a la reparación o sustitución de un producto desde su lan-zamiento, y hasta 8 años después de la fecha de su desaparición de catálogo.
Compete exclusivamente a FAGOR determinar si la reparación entra dentro del marcodefinido como garantía.
CLAUSULAS EXCLUYENTES
La reparación se realizará en nuestras dependencias. Por tanto, quedan fuera degarantía todos los gastos de transporte o los ocasionados en el desplazamiento desu personal técnico para realizar la reparación de un equipo, aún estando éste dentrodel período de garantía antes citado.
La citada garantía se aplicará siempre que los equipos hayan sido desinstalados deacuedo con las instrucciones, no hayan sido maltratados o sufrido desperfectos poraccidente o negligencia y no hayan sido intervenidos por personal no autorizado porFAGOR.
Si, una vez realizada la asistencia o reparación, la causa de la avería no es imputablea nuestro producto, el cliente está obligado a cubrir todos los gastos ocasionadosateniéndose a las tarifas vigentes.
No están cubiertas otras garantías implícitas o explícitas y FAGOR AUTOMATIONno se hace responsable bajo ninguna circunstancia de otros daños o perjuicios quepudieran ocasionarse.
CONTRATOS DE ASISTENCIA
Están a disposición del cliente Contratos de Asistencia y Mantenimiento tanto parael período de garantía como fuera de él.
Regulación AC Brushless digital - Ref.0910 MCPi-3/112
DECLARACIÓN DE CONFORMIDAD
Fabricante: Fagor Automation, S. Coop.
Bº San Andrés 19, C.P. 20500, Mondragón - Guipúzcoa - (SPAIN)
Declara: bajo su exclusiva responsabilidad la conformidad del producto:
Sistema de regulación AC Brushless Fagor
compuesto por los módulos reguladores:
MCPi- 07L, MCPi-11L, MCPi-15L
y los servomotores de eje de avance:
FSA01, FSA02, FSA04, FSA08, FSP01, FSP02, FSP04, FSP08
Nota. Algunos caracteres adicionales pueden seguir a las referencias de los modelosindicados arriba. Todos ellos cumplen con las Directivas listadas. No obstante, el cum-plimiento puede verificarse en la etiqueta del propio equipo.
al que se refiere esta declaración, con las normas:
Seguridad
Compatibilidad Electromagnética
De acuerdo con las disposiciones de las Directivas Comunitarias 2006/95/EC de BajaTensión y 2004/108/CE de Compatibilidad Electromagnética.
En Mondragón a 1 de Julio del 2009
PRESENTACIÓN
Fagor le ofrece la gama de accionamientos (motor AC Brushless FS más reguladordigital) para aplicaciones entre 0,318 y 2,39 N·m, a una velocidad nominal de 3.000rev/min.
Este manual ofrece toda la información descriptiva de los elementos y guía paso a pasoen la instalación y ajuste del accionamiento.
Si es la primera vez que realiza la instalación, léase este documento completo.
Ante cualquier duda o necesidad no dude en consultar con nuestros técnicos en cual-quiera de las oficinas subsidiarias.
Gracias por elegir Fagor.
EN 60204 -1:2006
Seguridad de maquinaria. Equipamiento eléctrico de máquinas.Parte 1: Requisitos generales.
EN 61800-3:2004
Norma de EMC para regulación.
MCPi-4/112 Regulación AC Brushless digital - Ref.0910
Índice general
MOTORES BRUSHLESS AC, FS................................................................................7
Introducción..................................................................................................................7Características generales ............................................................................................7Curvas par - velocidad .................................................................................................9Servomotores síncronos AC. Serie FSA......................................................................9Servomotores síncronos AC. Serie FSP......................................................................9Dimensiones ..............................................................................................................10Conectores base de potencia y salida del encóder ...................................................12Características del freno ............................................................................................13Referencia comercial .................................................................................................14
A.C. SERVODRIVE....................................................................................................15
Introducción................................................................................................................15Características generales ..........................................................................................15Características del interfaz hardware.........................................................................15Dimensiones ..............................................................................................................16Datos técnicos............................................................................................................17Conectores.................................................................................................................18Indicadores.................................................................................................................23Pulsadores y conmutadores.......................................................................................24Vista frontal del módulo..............................................................................................25Vista superior del módulo...........................................................................................25Patillaje de los conectores .........................................................................................26Referencia comercial .................................................................................................28
INSTALACIÓN ...........................................................................................................29
Consideraciones generales........................................................................................29Conexiones eléctricas ................................................................................................30Esquema del armario eléctrico...................................................................................40Inicialización y ajuste .................................................................................................43Interfaz software.........................................................................................................46Tipos de posicionamiento ..........................................................................................46Sintaxis del editor de tablas .......................................................................................46Estructura del bloque de posicionamiento .................................................................50Modo de ejecución de una tabla ................................................................................52Variables del estado de posicionamiento...................................................................54Configuración del posicionador..................................................................................55
PARÁMETROS, VARIABLES Y COMANDOS ..........................................................60
Grupo A. Aplicación ...................................................................................................62Grupo B. Entradas - salidas no programables ...........................................................62Grupo C. Corriente.....................................................................................................63Grupo D. Diagnósticos ...............................................................................................67Grupo E. Simulador de encóder.................................................................................69Grupo G. Generales...................................................................................................70Grupo H. Hardware ....................................................................................................72Grupo I. Entradas.......................................................................................................72
Regulación AC Brushless digital - Ref.0910 MCPi-5/112
Grupo K. Monitorización.............................................................................................74Grupo L. Motion Control .............................................................................................75Grupo M. Motor ..........................................................................................................80Grupo N. Configuración del eje lineal ........................................................................81Grupo O. Salidas analógicas y digitales ....................................................................83Grupo P. Lazo de posición.........................................................................................86Grupo Q. Comunicación.............................................................................................92Grupo S. Velocidad ....................................................................................................93Grupo T. Par y potencia .............................................................................................98Grupo W. Generador interno......................................................................................99
REGISTROS DEL PLC DEDICADOS......................................................................101
MENSAJES DE ERROR..........................................................................................102
AVISOS....................................................................................................................107
LISTADO DE PARÁMETROS, VARIABLES Y COMANDOS. IDs MODBUS..........108
MCPi-6/112 Regulación AC Brushless digital - Ref.0910
MOTORES BRUSHLESS AC, FS
Introducción
Características generales
Los servomotores síncronos FS (se-ries FSA y FSP) son del tipo AC Brus-hless, de imanes permanentes.
Son apropiados para cualquier aplica-ción que requiera una gran precisiónen el posicionamiento.
Tienen un par de salida uniforme, unaalta fiabilidad y un bajo mantenimien-to.
Excitación Imanes permanentes
Medidor de temperatura No disponible
Terminación del eje Cilíndrico con chaveta (opcional: sin chaveta)
Montaje Brida frontal
Forma de montaje IM B5, IM V1, IM V3 (según IEC-34-3-72)
Tolerancias mecánicasExcentricidad: 0,02 Concentricidad: 0,04Perpendicularidad: 0,04
Vida de los rodamientos 20000 horas
Resistencia a la vibración Aceleración de vibración: 49 m/s2
Clase de vibración 15 µm o inferior
Aislamiento eléctrico Clase B (130°C / 266°F)
Resistencia de aislamiento 500 V DC, 10 M ó superior
Rigidez dieléctrica Motores a 200 V: 1500 V AC, un minuto
Cuerpo o envolvente Totalmente cerrado y autoventilado
Grado de protección General: IP 55 estándar (excluida la sección del eje)
Tª de almacenamiento De -20°C a 60°C (de -4°F a 140°F)
Tª ambiente permitida De 0°C a 40°C (de 32°F a 104°F)
Humedad ambiente permitida De 20% a 80% (no condensado)
Alimentación del freno 24 V DC - el freno es opcional -
CaptaciónEstándar: Encóder incremental (13 bits: 2048 ppv)Opcional: Encóder absoluto (16 bits:16384 ppv)
Regulación AC Brushless digital - Ref.0910 MCPi-7/112
Pa
r d
e p
ico
(du
rant
e 3s
)
MC
Pi
15 L
Nm
7,1
6
Pa
r d
e p
ico
(du
rant
e 3s
)
MC
Pi
15 L
Nm
7,1
6
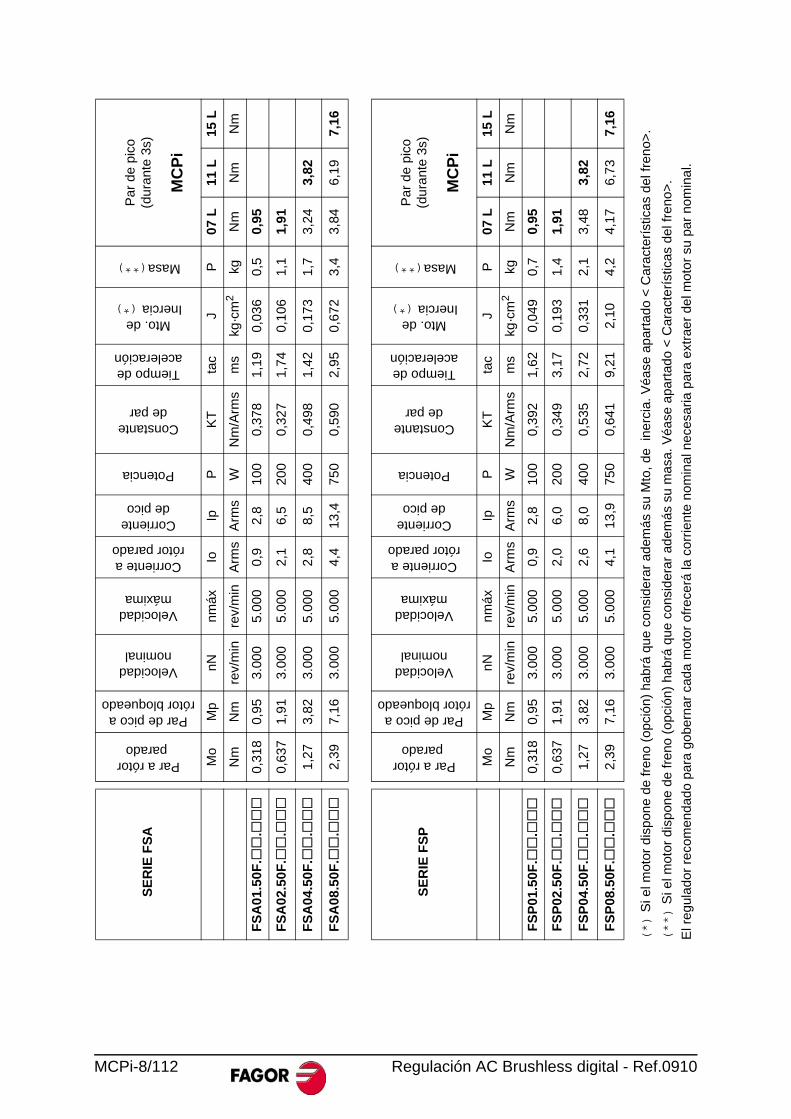
(*)
Si e
l mot
or d
isp
one
de f
reno
(op
ció
n)
ha
brá
que
cons
ide
rar
adem
ás
su M
to,
de
ine
rcia
. V
éas
e ap
arta
do
< C
ara
cter
ístic
as
del
fre
no>
.
(**)
Si e
l mot
or d
isp
one
de f
reno
(op
ció
n) h
abrá
qu
e co
nsid
era
r ad
emá
s su
ma
sa.
Véa
se a
part
ado
< C
ara
cte
ríst
ica
s de
l fre
no>
.
El r
eg
ula
dor
re
com
end
ado
para
go
bern
ar
cad
a m
oto
r of
rece
rá la
co
rrie
nte
no
min
al n
ece
saria
pa
ra e
xtra
er
del m
oto
r su
pa
r no
min
al.
11
L
Nm
3,8
2
6,1
9
11
L
Nm
3,8
2
6,7
3
07
L
Nm
0,95
1,91
3,24
3,84
07
L
Nm
0,95
1,91
3,48
4,17
Masa(**) P kg 0,5
1,1
1,7
3,4 Masa(**) P kg 0,7
1,4
2,1
4,2
Mto. deInercia (*)
J
kg·c
m2
0,0
36
0,1
06
0,1
73
0,6
72
Mto. deInercia (*)
J
kg·c
m2
0,0
49
0,1
93
0,3
31
2,10
Tiempo de aceleración
tac
ms
1,1
9
1,7
4
1,4
2
2,9
5
Tiempo de aceleración
tac
ms
1,6
2
3,1
7
2,7
2
9,2
1
Constantede par
KT
Nm
/Arm
s
0,3
78
0,3
27
0,4
98
0,5
90
Constantede par
KT
Nm
/Arm
s
0,3
92
0,3
49
0,5
35
0,6
41
Potencia P W 10
0
20
0
40
0
75
0 Potencia P W 10
0
20
0
40
0
75
0Corrientede pico
Ip
Arm
s
2,8
6,5
8,5
13,4
Corrientede pico
Ip
Arm
s
2,8
6,0
8,0
13,9
Corriente arótor parado
Io
Arm
s
0,9
2,1
2,8
4,4
Corriente arótor parado
Io
Arm
s
0,9
2,0
2,6
4,1
Velocidadmáxima
nm
áx
rev/
min
5.0
00
5.0
00
5.0
00
5.0
00
Velocidadmáxima
nm
áx
rev/
min
5.0
00
5.0
00
5.0
00
5.0
00
Velocidadnominal
nN
rev/
min
3.00
0
3.00
0
3.00
0
3.00
0
Velocidadnominal
nN
rev/
min
3.00
0
3.00
0
3.00
0
3.00
0
Par de pico arótor bloqueado
Mp
Nm
0,95
1,91
3,82
7,16 Par de pico a
rótor bloqueado
Mp
Nm
0,95
1,91
3,82
7,16
Par a rótor parado
Mo
Nm
0,31
8
0,63
7
1,27
2,39 Par a rótor
parado
Mo
Nm
0,31
8
0,63
7
1,27
2,39
SE
RIE
FS
A
FS
A0
1.50
F.
.
FS
A0
2.50
F.
.
FS
A0
4.50
F.
.
FS
A0
8.50
F.
.
SE
RIE
FS
P
FS
P0
1.5
0F.
.
FS
P0
2.5
0F.
.
FS
P0
4.5
0F.
.
FS
P0
8.5
0F.
.
MCPi-8/112 Regulación AC Brushless digital - Ref.0910
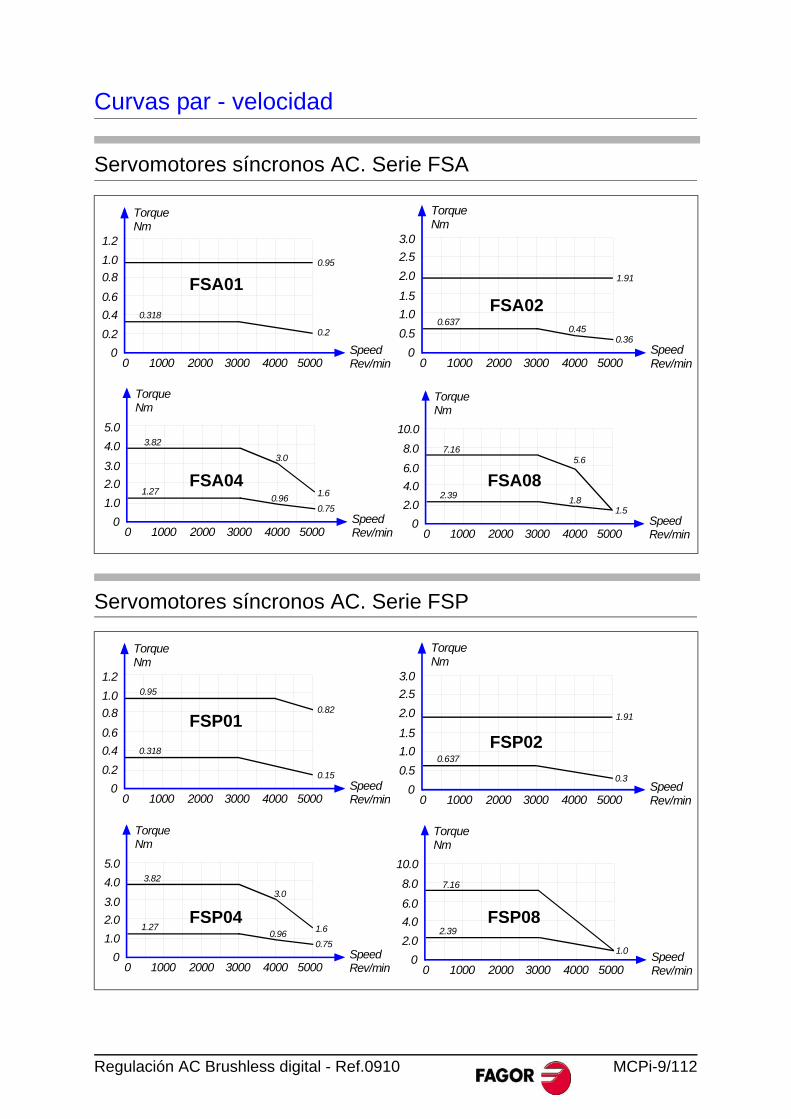
Curvas par - velocidad
Servomotores síncronos AC. Serie FSA
Servomotores síncronos AC. Serie FSP
1000 3000 5000
0.2
TorqueNm
Speed Rev/min2000 40000
0
0.4
0.6
0.8
1.0
1.2
0.318
0.95
0.2
1000 3000 5000
TorqueNm
Speed Rev/min2000 40000
0
1.0
1.5
2.0
2.5
3.0
0.637
1.91
0.5 0.450.36
FSA01FSA02
1000 3000 5000
TorqueNm
Speed Rev/min2000 40000
0
2.0
3.0
4.0
5.0
1.27
3.82
1.0 0.960.75
1.6
3.0
FSA04
1000 3000 5000
TorqueNm
Speed Rev/min2000 40000
0
4.0
6.0
8.0
10.0
2.39
7.16
2.0 1.81.5
5.6
FSA08
1000 3000 5000
TorqueNm
Speed Rev/min2000 40000
0
4.0
6.0
8.0
10.0
2.39
7.16
2.01.0
1000 3000 5000
TorqueNm
Speed Rev/min2000 40000
0
2.0
3.0
4.0
5.0
1.27
3.82
1.0 0.960.75
1.6
3.0
1000 3000 5000
TorqueNm
Speed Rev/min2000 40000
0
1.0
1.5
2.0
2.5
3.0
0.637
1.91
0.50.3
1000 3000 5000
0.2
TorqueNm
Speed Rev/min2000 40000
0
0.4
0.6
0.8
1.0
1.2
0.318
0.82
0.15
0.95
FSP01FSP02
FSP04 FSP08
Regulación AC Brushless digital - Ref.0910 MCPi-9/112
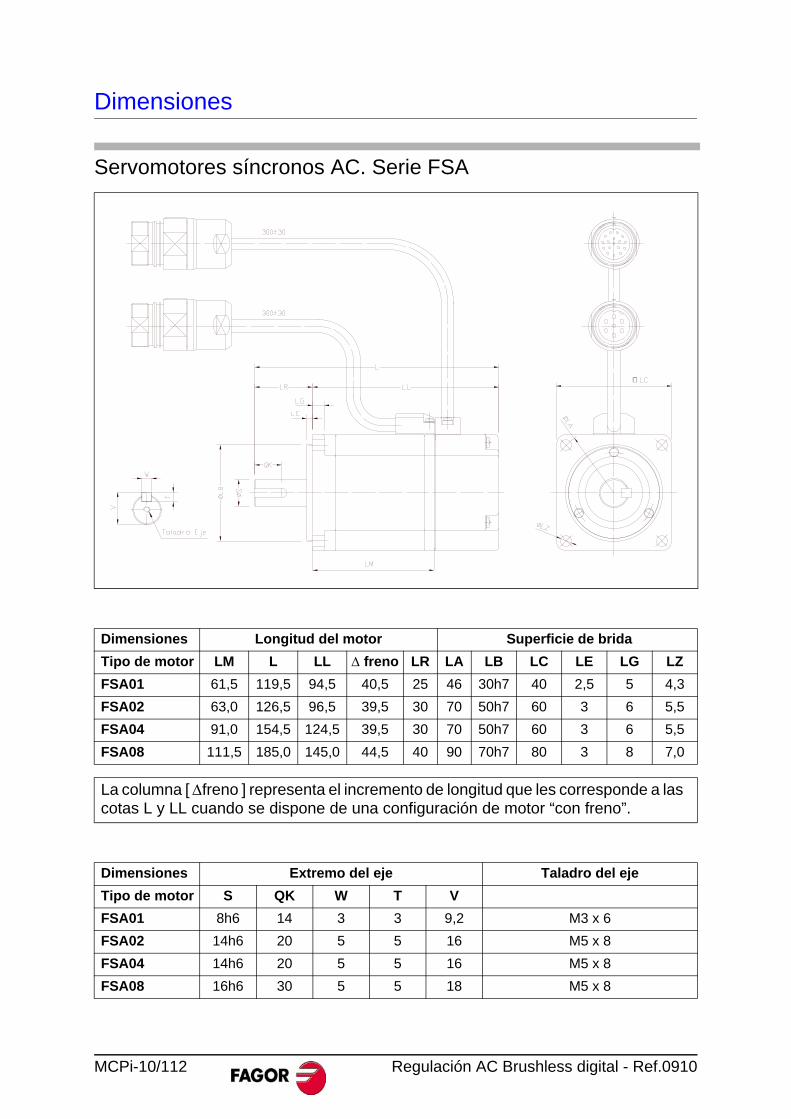
Dimensiones
Servomotores síncronos AC. Serie FSA
Dimensiones Longitud del motor Superficie de brida
Tipo de motor LM L LL freno LR LA LB LC LE LG LZ
FSA01 61,5 119,5 94,5 40,5 25 46 30h7 40 2,5 5 4,3
FSA02 63,0 126,5 96,5 39,5 30 70 50h7 60 3 6 5,5
FSA04 91,0 154,5 124,5 39,5 30 70 50h7 60 3 6 5,5
FSA08 111,5 185,0 145,0 44,5 40 90 70h7 80 3 8 7,0
La columna [freno ] representa el incremento de longitud que les corresponde a lascotas L y LL cuando se dispone de una configuración de motor “con freno”.
Dimensiones Extremo del eje Taladro del eje
Tipo de motor S QK W T V
FSA01 8h6 14 3 3 9,2 M3 x 6
FSA02 14h6 20 5 5 16 M5 x 8
FSA04 14h6 20 5 5 16 M5 x 8
FSA08 16h6 30 5 5 18 M5 x 8
MCPi-10/112 Regulación AC Brushless digital - Ref.0910
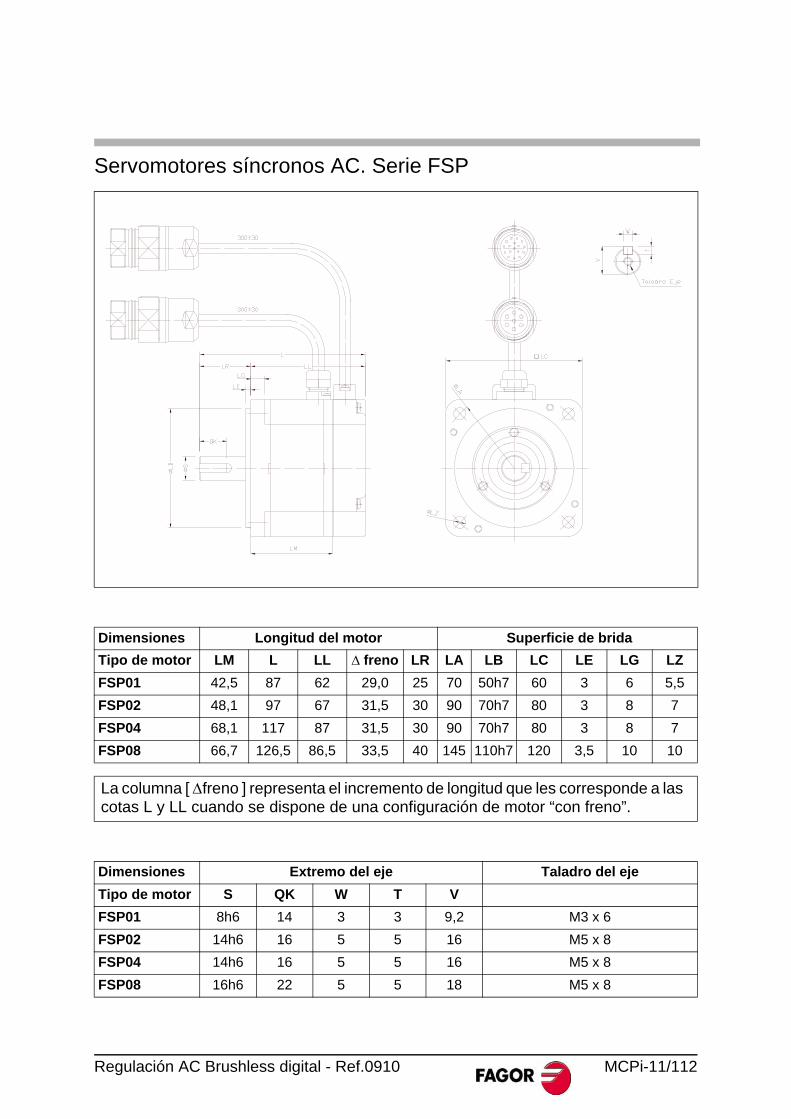
Servomotores síncronos AC. Serie FSP
Dimensiones Longitud del motor Superficie de brida
Tipo de motor LM L LL freno LR LA LB LC LE LG LZ
FSP01 42,5 87 62 29,0 25 70 50h7 60 3 6 5,5
FSP02 48,1 97 67 31,5 30 90 70h7 80 3 8 7
FSP04 68,1 117 87 31,5 30 90 70h7 80 3 8 7
FSP08 66,7 126,5 86,5 33,5 40 145 110h7 120 3,5 10 10
La columna [ freno ] representa el incremento de longitud que les corresponde a lascotas L y LL cuando se dispone de una configuración de motor “con freno”.
Dimensiones Extremo del eje Taladro del eje
Tipo de motor S QK W T V
FSP01 8h6 14 3 3 9,2 M3 x 6
FSP02 14h6 16 5 5 16 M5 x 8
FSP04 14h6 16 5 5 16 M5 x 8
FSP08 16h6 22 5 5 18 M5 x 8
Regulación AC Brushless digital - Ref.0910 MCPi-11/112
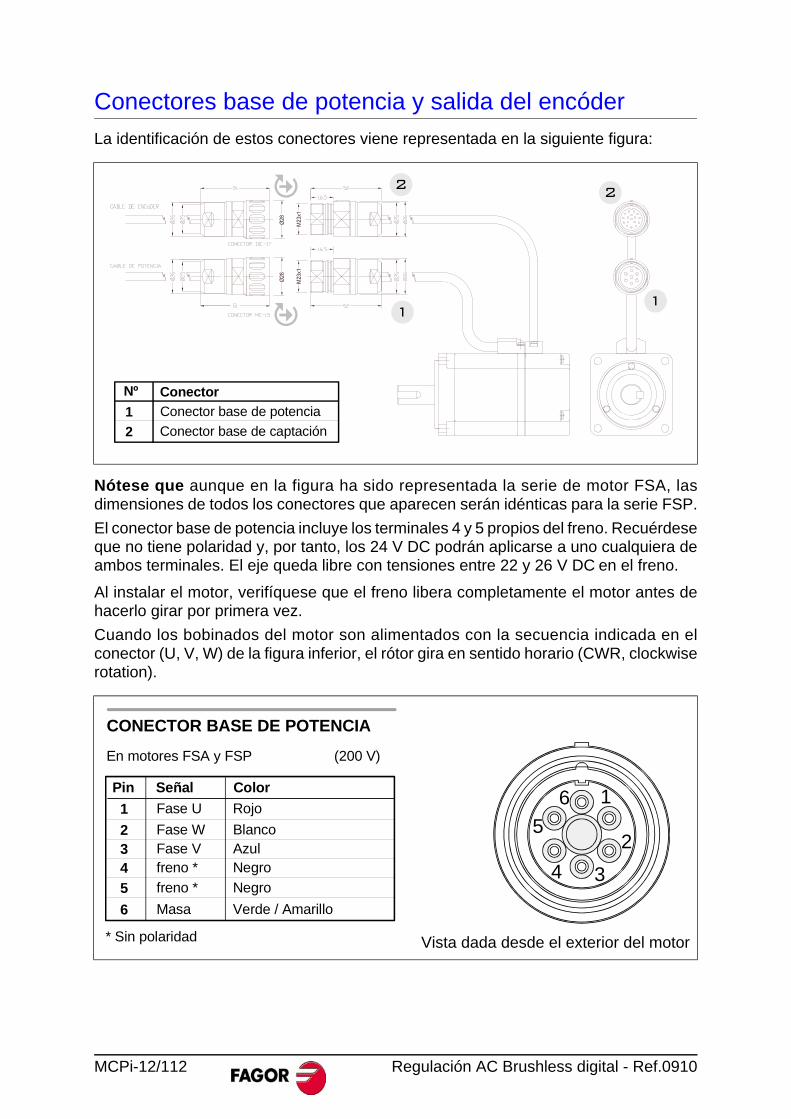
Conectores base de potencia y salida del encóder
La identificación de estos conectores viene representada en la siguiente figura:
Nótese que aunque en la figura ha sido representada la serie de motor FSA, lasdimensiones de todos los conectores que aparecen serán idénticas para la serie FSP.
El conector base de potencia incluye los terminales 4 y 5 propios del freno. Recuérdeseque no tiene polaridad y, por tanto, los 24 V DC podrán aplicarse a uno cualquiera deambos terminales. El eje queda libre con tensiones entre 22 y 26 V DC en el freno.
Al instalar el motor, verifíquese que el freno libera completamente el motor antes dehacerlo girar por primera vez.
Cuando los bobinados del motor son alimentados con la secuencia indicada en elconector (U, V, W) de la figura inferior, el rótor gira en sentido horario (CWR, clockwiserotation).
2
1
2
1
ConectorNº
1 Conector base de potencia
2 Conector base de captación
CONECTOR BASE DE POTENCIA
En motores FSA y FSP (200 V)
* Sin polaridad
Señal
2
16
5
4 3
Pin Color
1 Fase U Rojo
2 Fase W Blanco3 Fase V Azul4 freno * Negro
5 freno * Negro
6 Masa Verde / Amarillo
Vista dada desde el exterior del motor
MCPi-12/112 Regulación AC Brushless digital - Ref.0910
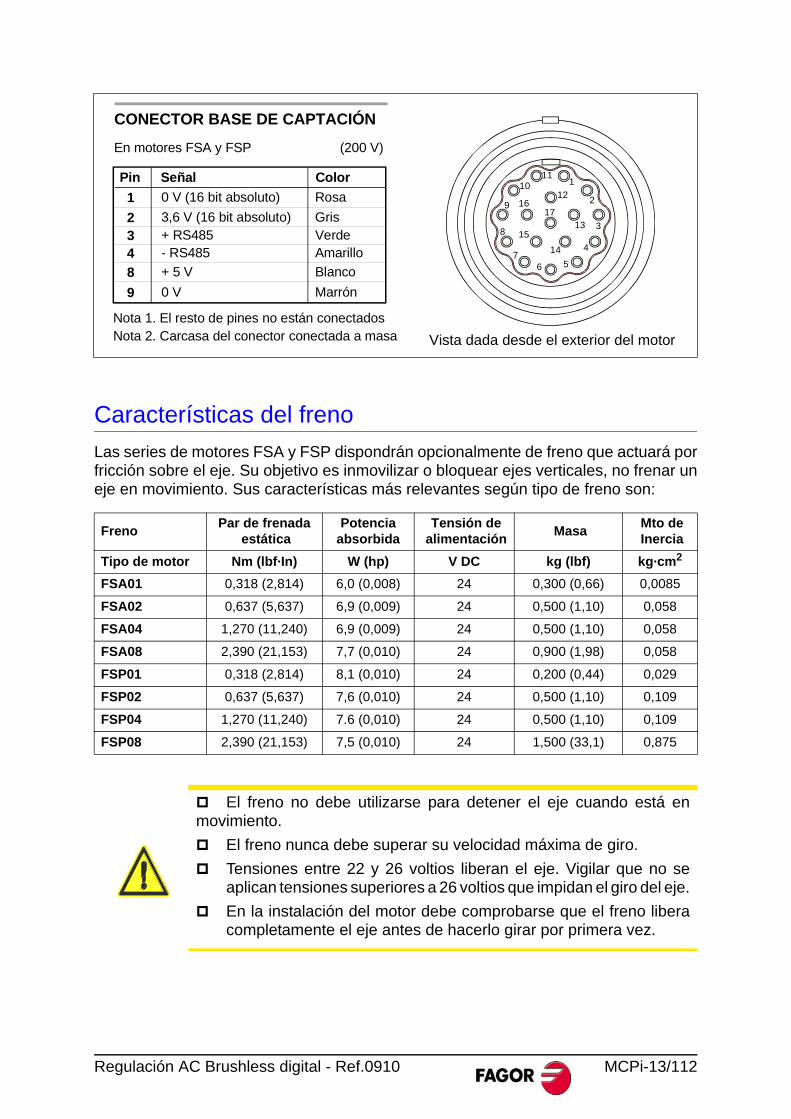
Características del freno
Las series de motores FSA y FSP dispondrán opcionalmente de freno que actuará porfricción sobre el eje. Su objetivo es inmovilizar o bloquear ejes verticales, no frenar uneje en movimiento. Sus características más relevantes según tipo de freno son:
FrenoPar de frenada
estáticaPotencia
absorbidaTensión de
alimentaciónMasa
Mto de Inercia
Tipo de motor Nm (lbf·In) W (hp) V DC kg (lbf) kg·cm2
FSA01 0,318 (2,814) 6,0 (0,008) 24 0,300 (0,66) 0,0085
FSA02 0,637 (5,637) 6,9 (0,009) 24 0,500 (1,10) 0,058
FSA04 1,270 (11,240) 6,9 (0,009) 24 0,500 (1,10) 0,058
FSA08 2,390 (21,153) 7,7 (0,010) 24 0,900 (1,98) 0,058
FSP01 0,318 (2,814) 8,1 (0,010) 24 0,200 (0,44) 0,029
FSP02 0,637 (5,637) 7,6 (0,010) 24 0,500 (1,10) 0,109
FSP04 1,270 (11,240) 7.6 (0,010) 24 0,500 (1,10) 0,109
FSP08 2,390 (21,153) 7,5 (0,010) 24 1,500 (33,1) 0,875
El freno no debe utilizarse para detener el eje cuando está enmovimiento.
El freno nunca debe superar su velocidad máxima de giro.
Tensiones entre 22 y 26 voltios liberan el eje. Vigilar que no seaplican tensiones superiores a 26 voltios que impidan el giro del eje.
En la instalación del motor debe comprobarse que el freno liberacompletamente el eje antes de hacerlo girar por primera vez.
1
2
3
4
567
8
9
1011
12
13
14
15
1617
CONECTOR BASE DE CAPTACIÓN
En motores FSA y FSP (200 V)
Nota 1. El resto de pines no están conectados
SeñalPin Color
1 0 V (16 bit absoluto) Rosa
2 3,6 V (16 bit absoluto) Gris3 + RS485 Verde4 - RS485 Amarillo
8 + 5 V Blanco
9 0 V Marrón
Nota 2. Carcasa del conector conectada a masa Vista dada desde el exterior del motor
Regulación AC Brushless digital - Ref.0910 MCPi-13/112
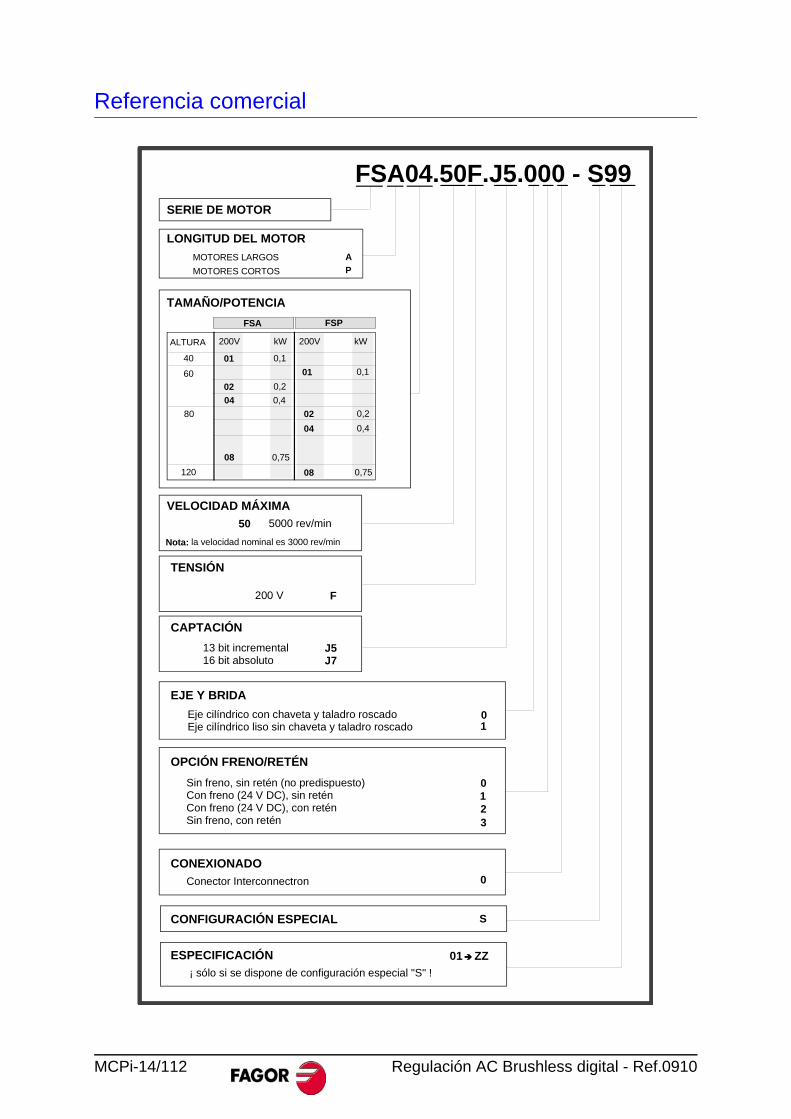
Referencia comercial
LONGITUD DEL MOTOR
SERIE DE MOTOR
MOTORES LARGOS MOTORES CORTOS
VELOCIDAD MÁXIMA
Nota: la velocidad nominal es 3000 rev/min
50 5000 rev/min
TENSIÓN400 V A200 V F
TAMAÑO/POTENCIA
ALTURA
CAPTACIÓN
13 bit incremental J516 bit absoluto J7
EJE Y BRIDA
Eje cilíndrico con chaveta y taladro roscado Eje cilíndrico liso sin chaveta y taladro roscado
OPCIÓN FRENO/RETÉN
Sin freno, sin retén (no predispuesto) Con freno (24 V DC), sin retén Con freno (24 V DC), con retén Sin freno, con retén
CONEXIONADO
Conector Interconnectron
0 1 2 3
0 1
0
CONFIGURACIÓN ESPECIAL S
ESPECIFICACIÓN
¡ sólo si se dispone de configuración especial "S" !
01 ZZ
A
P
200V kW
04 0,4
60
200V kW
02 0,280
04 0,4
08 0,75
08 0,75120
FSA04.50F.J5.000 - S99
FSA FSP
40 01 0,1
02 0,2
01 0,1
MCPi-14/112 Regulación AC Brushless digital - Ref.0910
A.C. SERVODRIVEIntroducción
La familia MCP Innova Servodrive (MCPi) es una variante de la familia de reguladoresmonobloque de velocidad MCS Innova (MCSi) diseñada especialmente para cubrir lasnecesidades en aplicaciones sencillas dentro del entorno de Motion Control.
Incorpora un posicionador (modo tabla) integrado.
Tanto los elementos que conforman la tabla del posicionador como los parámetros delregulador podrán ser modificados desde dos fuentes diferentes; un elemento externoque disponga de un interfaz serie RS485 ó un interfaz USB cuando se trata de un PC,basados ambos en el protocolo de comunicaciones ModBus (RTU ó ASCII). Todos losparámetros del regulador (salvo algunas excepciones) serán modificables on line.
Existen tres módulos de diferentes potencias que ofrecen corrientes de pico de 6,5, 10,5y 15,0 amperios eficaces para una tensión de alimentación de 220 V AC monofásica.
Características generales
Tienen como características principales:
Alimentación monofásica a 220 V AC.
Frenado dinámico en caso de caída de red.
PWM IGBTs
Realimentación por encóder serie de 16 bits absoluto.
Salida simuladora de encóder programable.
Dos entradas lógicas dedicadas para el control del motor. Speed Enable y Drive Enable.
Funciones integradas.
Cambio de parámetros on-line.
Interfaz de comunicación RS485.
Línea de comunicación de servicio USB.
Protocolos de comunicación posibles: ModBus (RTU y ASCII).
Características del interfaz hardware
El regulador posicionador MCPi dispone de las mismas entradas y salidas que elregulador de velocidad MCSi, si bien el primero incorpora además:
Una salida digital optoacoplada con varias funciones. Por defecto: IN POSITION.
Una entrada de captación directa para un encóder incremental externo TTL ó paraun encóder senoidal de señales Vpp.
Una salida simuladora de encóder por la que pueden obtenerse hasta el mismonúmero de pulsos del encóder de la captación motor (encóder serie absoluto de 16bits) donde se consiguen 16384 pulsos por revolución.
Regulación AC Brushless digital - Ref.0910 MCPi-15/112
Un conector doble de comunicaciones capaz de conectarse a una línea serie RS485,ModBus.
Un display de estado de 4 dígitos
16 entradas y 8 salidas que pueden ser configuradas como IOs genéricas o con sufunción preprogramada.
8 salidas optoacopladas a 24 V.
16 entradas dedicadas activas a 24 V:
Entrada final de carrera derecha <FW LIMIT>.
Entrada final de carrera izquierda <REV LIMIT>.
Entrada automático/manual <AUTOM/MAN>.
Entrada Start <START>.
Entrada Stop <STOP>.
Entrada de pulsador de velocidad manual + <JOG +>.
Entrada de pulsador de velocidad manual - <JOG ->.
Entrada de Reset <RESET>.
Entrada External Fast IN <FAST INPUT>.
Entrada de leva de búsqueda de I0 <HOMING SW>.
Entrada de comando de búsqueda de I0 <HOMING>.
Entradas de selección del número de bloque de Start del programa <S0, S1, S2, S3, S4>.
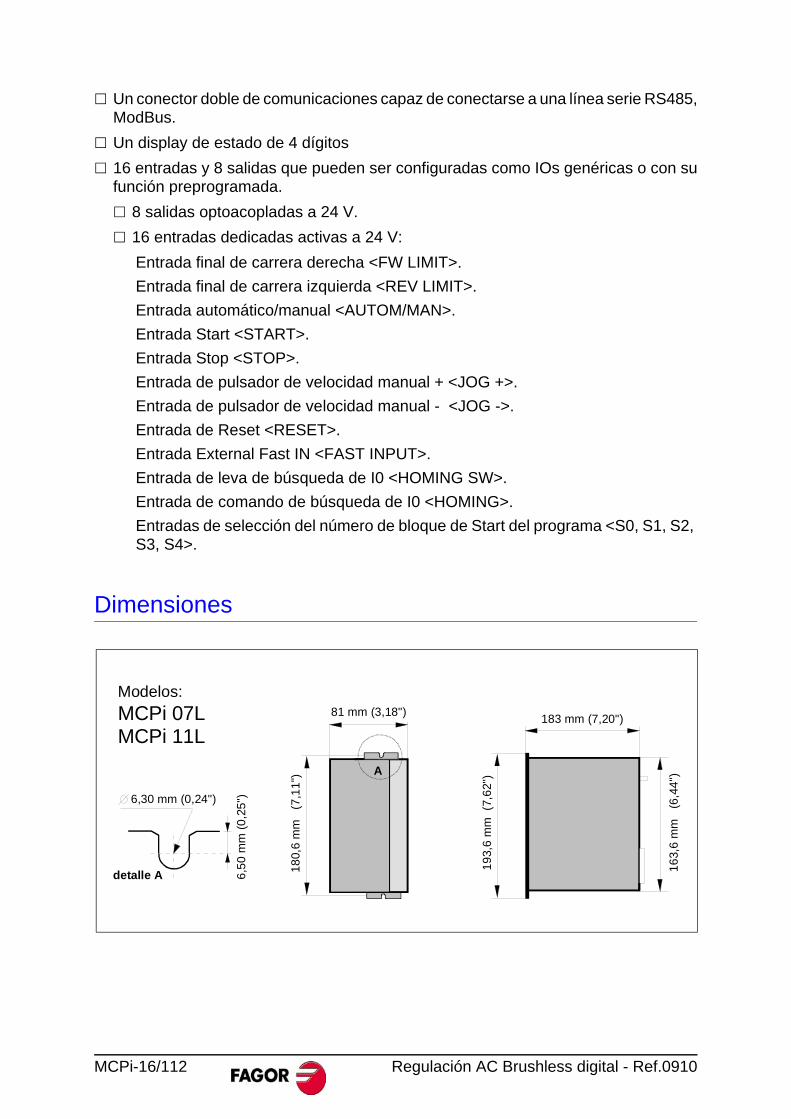
Dimensiones
81 mm (3,18")
18
0,6
mm
(
7,1
1")
19
3,6
mm
(7
,62"
)
183 mm (7,20")
16
3,6
mm
(
6,4
4")
A
Modelos: MCPi 07LMCPi 11L
6,30 mm (0,24")
6,5
0 m
m (
0,2
5")
detalle A
MCPi-16/112 Regulación AC Brushless digital - Ref.0910
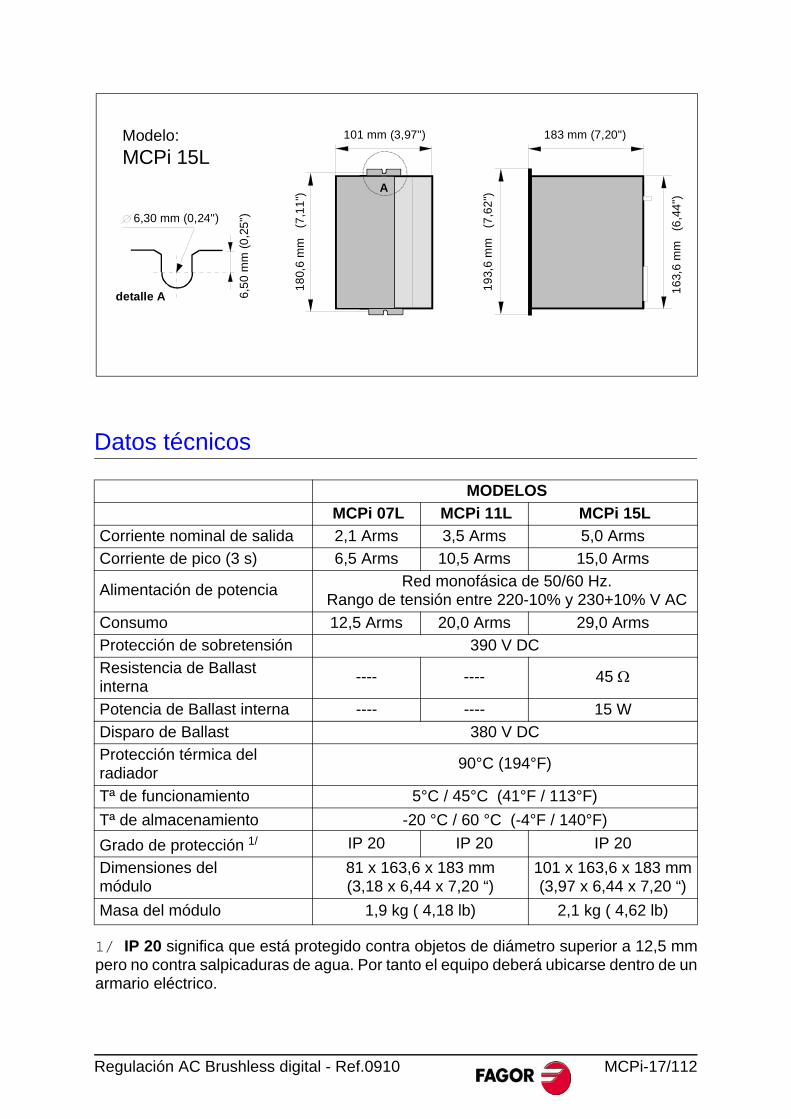
Datos técnicos
Modelo:
MCPi 15L183 mm (7,20")
16
3,6
mm
(
6,4
4")
101 mm (3,97")
18
0,6
mm
(
7,1
1")
19
3,6
mm
(
7,6
2")
6,30 mm (0,24")
6,5
0 m
m (
0,2
5")
detalle A
A
MODELOS
MCPi 07L MCPi 11L MCPi 15L
Corriente nominal de salida 2,1 Arms 3,5 Arms 5,0 Arms
Corriente de pico (3 s) 6,5 Arms 10,5 Arms 15,0 Arms
Alimentación de potencia Red monofásica de 50/60 Hz. Rango de tensión entre 220-10% y 230+10% V AC
Consumo 12,5 Arms 20,0 Arms 29,0 Arms
Protección de sobretensión 390 V DC
Resistencia de Ballast interna
---- ---- 45
Potencia de Ballast interna ---- ---- 15 W
Disparo de Ballast 380 V DC
Protección térmica del radiador
90°C (194°F)
Tª de funcionamiento 5°C / 45°C (41°F / 113°F)
Tª de almacenamiento -20 °C / 60 °C (-4°F / 140°F)
Grado de protección 1/ IP 20 IP 20 IP 20
Dimensiones del módulo
81 x 163,6 x 183 mm(3,18 x 6,44 x 7,20 “)
101 x 163,6 x 183 mm(3,97 x 6,44 x 7,20 “)
Masa del módulo 1,9 kg ( 4,18 lb) 2,1 kg ( 4,62 lb)
1/ IP 20 significa que está protegido contra objetos de diámetro superior a 12,5 mmpero no contra salpicaduras de agua. Por tanto el equipo deberá ubicarse dentro de unarmario eléctrico.
Regulación AC Brushless digital - Ref.0910 MCPi-17/112
Conectores
Terminales de potencia
Conector X4
POWER INPUTS (L1, L2): Bornes de entrada de la tensión de alimenta-ción desde la red eléctrica.
POWER OUTPUTS (U, V, W): Bornes de salida de la tensión aplicada almotor. Control de corriente mediante PWM sobre una frecuencia portadorade 8 kHz. En la conexión al motor deberá vigilarse la correspondencia entrefases U-U, V-V y W-W.
Conector X9
L+, Ri, Re: Bornes de configuración y conexión de la resistencia de Ballastexterna.
Conector X5
CONTROL POWER INPUTS (L1, L2, GROUND): Bornes de entrada dela tensión de alimentación de los circuitos de control del regulador desdela red eléctrica. La sección máxima de los cables en estos terminales depotencia es de 2,5 mm2.
ACTIVACIÓN DEL VENTILADOR INTERNO: El ventilador interno querefrigera los elementos de potencia del regulador se pone en marcha conla habilitación de la señal Drive_Enable (sólo en modelos con ventiladorintegrado). Se detendrá cuando la temperatura del refrigerador sea inferiora 70°C desde la deshabilitación del Drive_Enable. Este sistema reduce eltiempo de funcionamiento del ventilador aumentando su vida útil.
MCPi-18/112 Regulación AC Brushless digital - Ref.0910
Señales de control
Conector X3
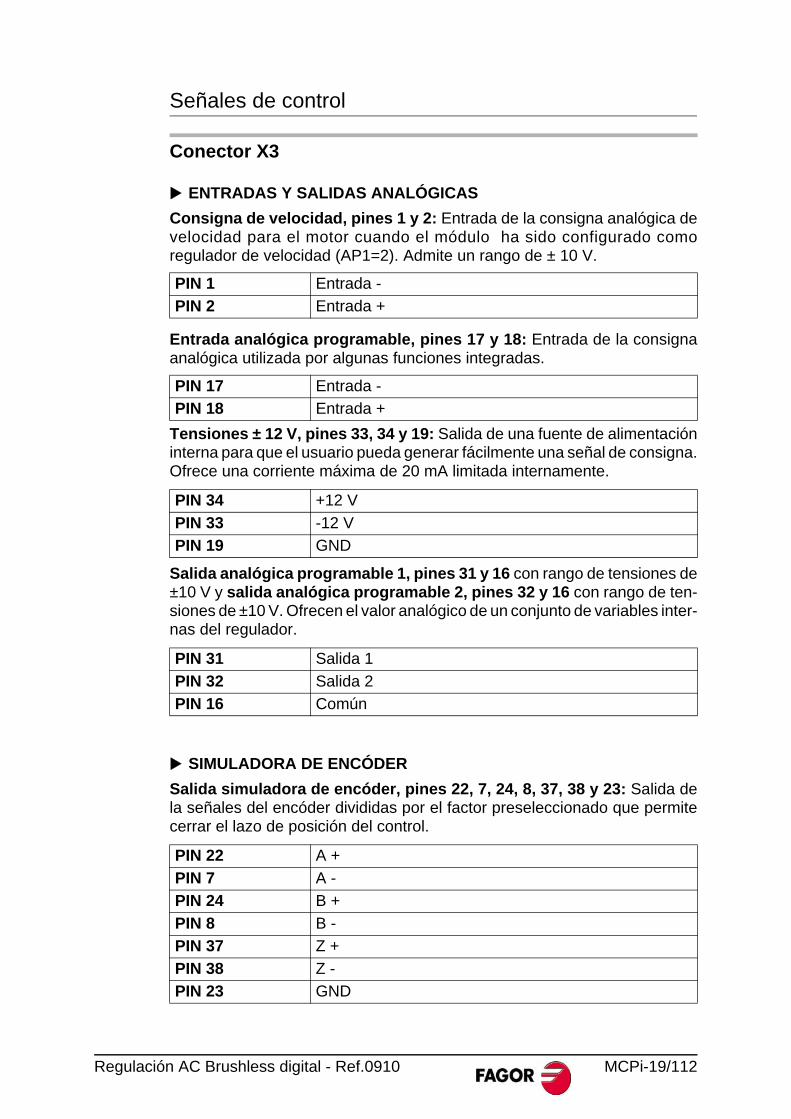
ENTRADAS Y SALIDAS ANALÓGICAS
Consigna de velocidad, pines 1 y 2: Entrada de la consigna analógica develocidad para el motor cuando el módulo ha sido configurado comoregulador de velocidad (AP1=2). Admite un rango de ± 10 V.
Entrada analógica programable, pines 17 y 18: Entrada de la consignaanalógica utilizada por algunas funciones integradas.
Tensiones ± 12 V, pines 33, 34 y 19: Salida de una fuente de alimentacióninterna para que el usuario pueda generar fácilmente una señal de consigna.Ofrece una corriente máxima de 20 mA limitada internamente.
Salida analógica programable 1, pines 31 y 16 con rango de tensiones de±10 V y salida analógica programable 2, pines 32 y 16 con rango de ten-siones de ±10 V. Ofrecen el valor analógico de un conjunto de variables inter-nas del regulador.
SIMULADORA DE ENCÓDER
Salida simuladora de encóder, pines 22, 7, 24, 8, 37, 38 y 23: Salida dela señales del encóder divididas por el factor preseleccionado que permitecerrar el lazo de posición del control.
PIN 1 Entrada -
PIN 2 Entrada +
PIN 17 Entrada -
PIN 18 Entrada +
PIN 34 +12 V
PIN 33 -12 V
PIN 19 GND
PIN 31 Salida 1
PIN 32 Salida 2
PIN 16 Común
PIN 22 A +
PIN 7 A -
PIN 24 B +
PIN 8 B -
PIN 37 Z +
PIN 38 Z -
PIN 23 GND
Regulación AC Brushless digital - Ref.0910 MCPi-19/112
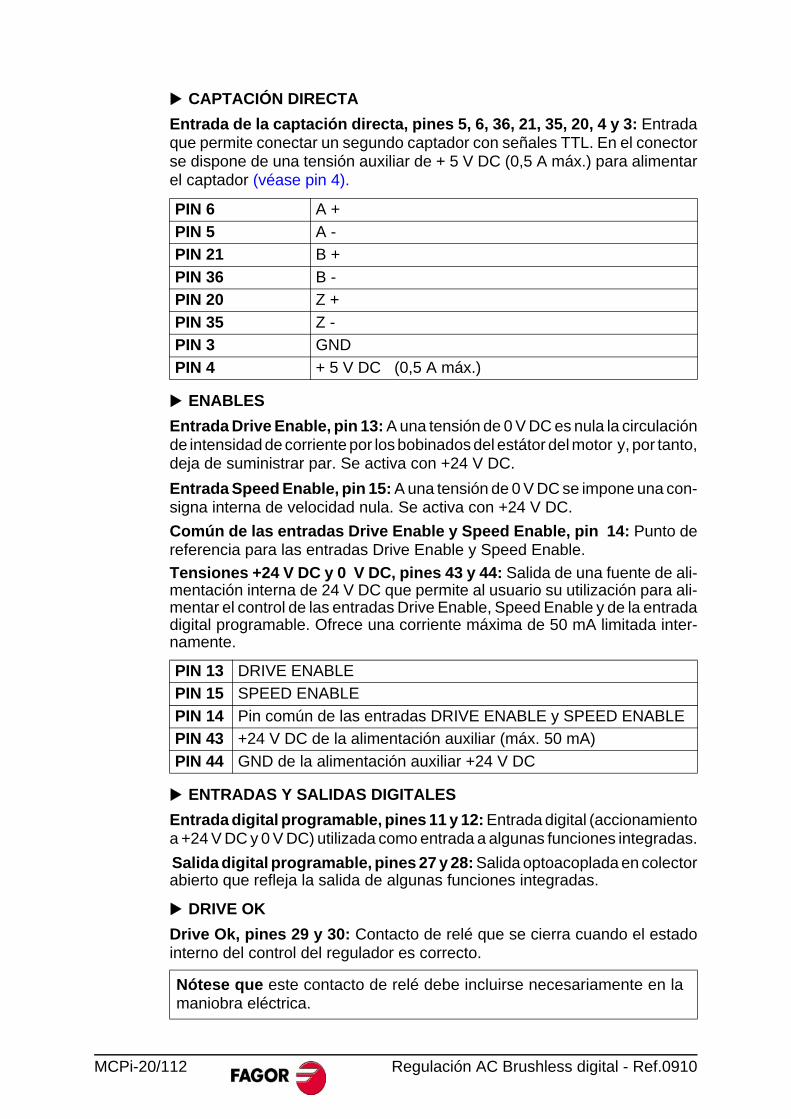
CAPTACIÓN DIRECTA
Entrada de la captación directa, pines 5, 6, 36, 21, 35, 20, 4 y 3: Entradaque permite conectar un segundo captador con señales TTL. En el conectorse dispone de una tensión auxiliar de + 5 V DC (0,5 A máx.) para alimentarel captador (véase pin 4).
ENABLES
Entrada Drive Enable, pin 13: A una tensión de 0 V DC es nula la circulaciónde intensidad de corriente por los bobinados del estátor del motor y, por tanto,deja de suministrar par. Se activa con +24 V DC.
Entrada Speed Enable, pin 15: A una tensión de 0 V DC se impone una con-signa interna de velocidad nula. Se activa con +24 V DC.
Común de las entradas Drive Enable y Speed Enable, pin 14: Punto dereferencia para las entradas Drive Enable y Speed Enable.
Tensiones +24 V DC y 0 V DC, pines 43 y 44: Salida de una fuente de ali-mentación interna de 24 V DC que permite al usuario su utilización para ali-mentar el control de las entradas Drive Enable, Speed Enable y de la entradadigital programable. Ofrece una corriente máxima de 50 mA limitada inter-namente.
ENTRADAS Y SALIDAS DIGITALES
Entrada digital programable, pines 11 y 12: Entrada digital (accionamientoa +24 V DC y 0 V DC) utilizada como entrada a algunas funciones integradas.
Salida digital programable, pines 27 y 28: Salida optoacoplada en colectorabierto que refleja la salida de algunas funciones integradas.
DRIVE OK
Drive Ok, pines 29 y 30: Contacto de relé que se cierra cuando el estadointerno del control del regulador es correcto.
PIN 6 A +
PIN 5 A -
PIN 21 B +
PIN 36 B -
PIN 20 Z +
PIN 35 Z -
PIN 3 GND
PIN 4 + 5 V DC (0,5 A máx.)
PIN 13 DRIVE ENABLE
PIN 15 SPEED ENABLE
PIN 14 Pin común de las entradas DRIVE ENABLE y SPEED ENABLE
PIN 43 +24 V DC de la alimentación auxiliar (máx. 50 mA)
PIN 44 GND de la alimentación auxiliar +24 V DC
Nótese que este contacto de relé debe incluirse necesariamente en lamaniobra eléctrica.
MCPi-20/112 Regulación AC Brushless digital - Ref.0910
RELÉ DE SEGURIDAD INTEGRADA
Relé de deshabilitación segura, pines 41 y 42: Segundo contactonormalmente cerrado (NC) que se utiliza como reconocimiento externo delestado del relé de seguridad integrada.
CHASIS
Carcasa metálica del conector: Punto de conexión de chasis del regulador.
Conector X1
COMUNICACIONES
Conector paralelo doble USB - tipo A que permite establecer una rápidainterconexión entre distintos equipos (protocolo ModBus) vía línea serieRS485. Dispone de selector de resistencia terminadora de línea donde suestado queda determinado así:
Conector X2
ENTRADA DE CAPTACIÓN MOTOR (Feedback Input)
Conector estándar del tipo IEEE 1394 que permite recibir la entrada de lasseñales del encóder serie, instalado en el propio motor, para la captación deposición + velocidad.
Conector X6
PUERTO DE SERVICIO
Conector estándar tipo USB mini AB que permite establecer conexión con unPC para realizar tareas de parametrización y monitorización de variables delsistema y de actualización del firmware del equipo mediante la aplicaciónWinDDSSetup para PC. Cualquier cable USB estándar con conector miniAó miniB puede ser conectado en el lado del regulador.
Conector X10
ENTRADAS (IOs)
GND, pin 1: Pin de GND. Referencia de todas las señales de este conector.
S0, S1, S2, S3 y S4, pines 2, 3, 4, 5 y 6, respectivamente: Entradas parala selección del nº de bloque de comienzo de programa. Permiten seleccionarel nº de bloque que se ejecutará cuando se active START. Activas a +24 Vdeterminando el nº de bloque en binario. Marca reflejo REG1.
Nótese que este contacto de relé debe incluirse necesariamente en lamaniobra eléctrica.
ON Resistencia conectada
OFF Resistencia no conectada
Regulación AC Brushless digital - Ref.0910 MCPi-21/112
Entrada START, pin 7: En modo de operación automático, un pulso de +24V con una duración superior a 1 ms en esta entrada inicia el bloque deposicionamiento automático. Marca reflejo LV15.
Entrada STOP, pin 8: Un pulso de 0 V con una duración superior a 1 ms enesta entrada detiene el bloque de posicionamiento, el comando de Homingy las funciones JOG. En modo bloque de posicionamiento, activandonuevamente la entrada START, seguirá ejecutándose el bloque deposicionamiento tal y como estaba previsto. En Homing y funciones de JOGsimplemente es anulado el comando. Marca reflejo LV16.
Entrada RESET, pin 9: En modo de funcionamiento automático y bloque deposicionamiento en ejecución, un pulso de +24 V con una duración superiora 1 ms en esta entrada aborta el posicionamiento. Si se reanuda la ejecucióndel bloque de posicionamiento, éste será ejecutado nuevamente desde elinicio. Marca reflejo LV17.
Entrada AUTO/MAN, pin 10: En esta entrada se conecta un conmutador quepermite seleccionar entre el modo automático y el modo manual. Marca reflejoLV13.
Entrada JOG+, pin 11: Entrada de pulsador de velocidad manual en sentidopositivo. Una vez seleccionado el modo de operación manual, alimentandoesta entrada con +24 V será ejecutado el movimiento en modo manual depen-diendo del valor prefijado en la variable LV19 - KernelManMode - (modo deoperación manual). LV19 = 0 prefija el modo de operación a manual continuo.El valor almacenado en el parámetro LP22 - JogVelocity - (mm/min ó grados/min) indica el valor del avance en sentido positivo al que se desplazará el ejecuando esta entrada está activada. LV19 = 1 prefija el modo de operacióna manual incremental. Esto significa que cada vez que sea activada estaentrada se producirá el avance en posición en sentido positivo determinadopor el parámetro LP23 - JogIncrementalPosition -. Marca reflejo LV20.
Entrada JOG-, pin 12: Entrada de pulsador de velocidad manual en sentidonegativo. Su funcionalidad es idéntica a la entrada anterior pero el sentidode los avances se producirá en sentido negativo. Marca reflejo LV21.
Entrada FW LIMIT, pin 13: Entrada de final de carrera (derecha). La acti-vación de esta entrada evita que el eje se desplace más allá de donde seencuentra ubicado este fin de carrera siendo posible el movimiento en el sen-tido opuesto.
Entrada REV FW. LIMIT, pin 14: Entrada de final de carrera (izquierda). Laactivación de esta entrada evita que el eje se desplace más allá de dondese encuentra ubicado este fin de carrera siendo posible el movimiento en elsentido opuesto.
0 V Modo automático+24 V Modo manual
0 V Activado+24 V Desactivado
0 V Activado+24 V Desactivado
MCPi-22/112 Regulación AC Brushless digital - Ref.0910
Entrada HOMING, pin 15: Entrada de comando de búsqueda de I0 en la quepuede ser conectado un conmutador de órden de búsqueda de I0. Estaentrada se activa a +24 V. Comando reflejo PC148.
Entrada HOMING SW, pin 16: Entrada de leva de búsqueda de I0 a la quese conecta el final de carrera de búsqueda de I0. La activación de esta entradadepende de PP147.1.
Entrada FAST INPUT, pin 17: Entrada “External Fast IN”. Ante la apariciónde un pulso de +24 V con una duración superior a 1 ms en esta entrada esactivada la marca de INIFAST interpretada en la tabla de posicionamiento.
Conector X11
SALIDAS (IOs)
EXT. +24V, pin 1: Entrada de la tensión de +24 V externa utilizada para llevara cabo la activación de las salidas OUT1, ... OUT8.
EXT. GND, pin 2: Entrada de GND externa utilizada para activar las salidasOUT1, ... OUT8.
OUT1, ... OUT8, pines 3, 4, 5, 6, 7, 8, 9 y 10, respectivamente: Salidas enemisor abierto activas a +24 V y protegidas contra cortocircuitos. Corrientede carga: 250 mA. Su estado viene definido por le valor contenido en el campoPROGOUT de la tabla de posicionamiento.
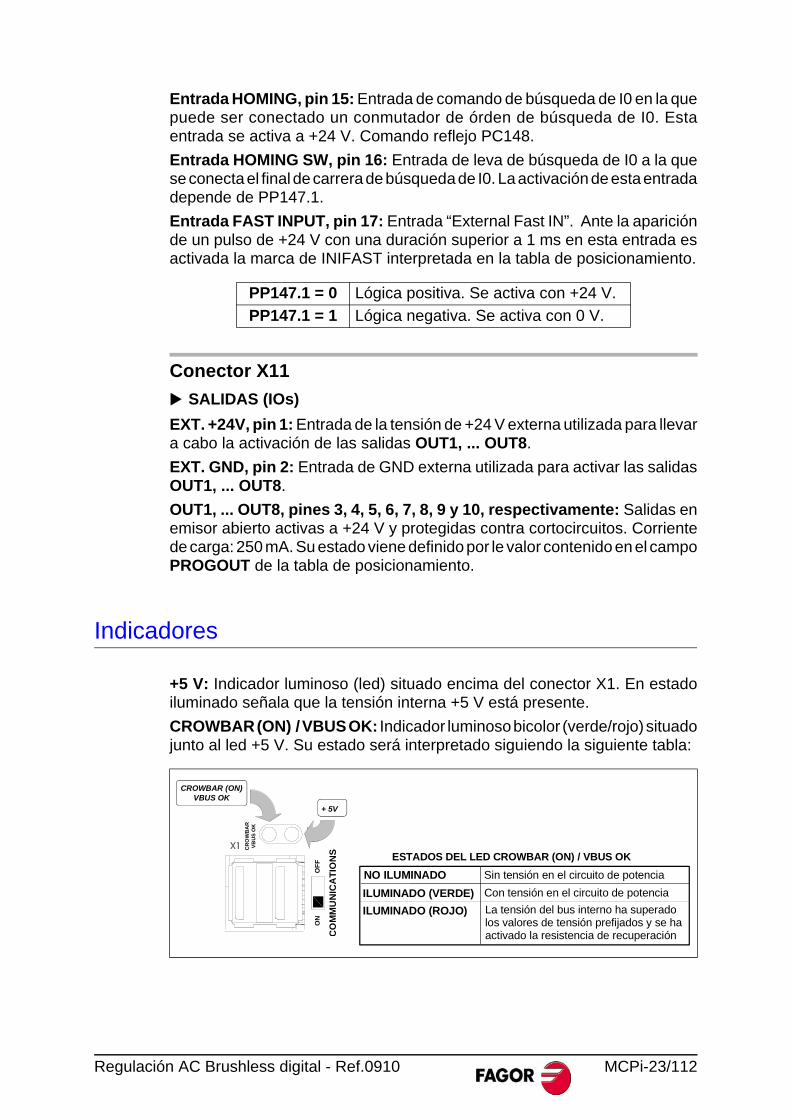
Indicadores
+5 V: Indicador luminoso (led) situado encima del conector X1. En estadoiluminado señala que la tensión interna +5 V está presente.
CROWBAR (ON) / VBUS OK: Indicador luminoso bicolor (verde/rojo) situadojunto al led +5 V. Su estado será interpretado siguiendo la siguiente tabla:
PP147.1 = 0 Lógica positiva. Se activa con +24 V.
PP147.1 = 1 Lógica negativa. Se activa con 0 V.
ESTADOS DEL LED CROWBAR (ON) / VBUS OK
NO ILUMINADO Sin tensión en el circuito de potencia
ILUMINADO (ROJO) La tensión del bus interno ha superadolos valores de tensión prefijados y se haactivado la resistencia de recuperación
ILUMINADO (VERDE) Con tensión en el circuito de potencia
CO
MM
UN
ICA
TIO
NS
+ 5
V
CR
OW
BA
R
VB
US
OK
ON
OF
F
+ 5V
CROWBAR (ON)VBUS OK
Regulación AC Brushless digital - Ref.0910 MCPi-23/112
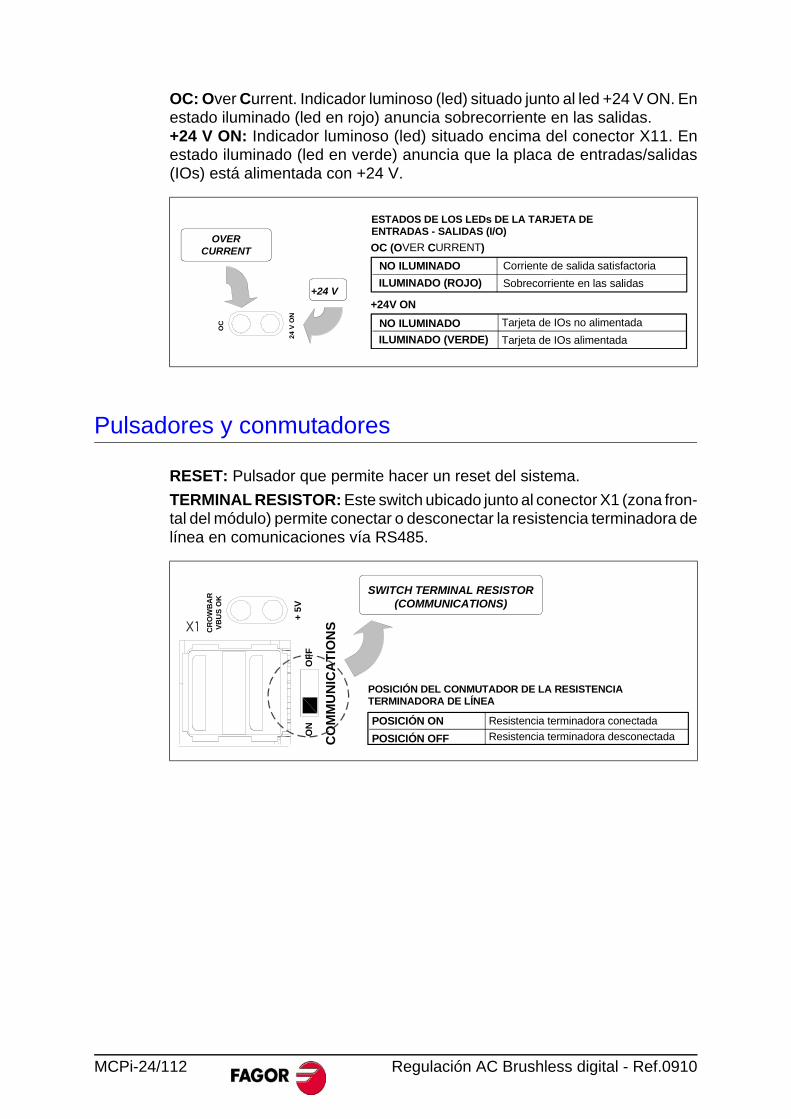
OC: Over Current. Indicador luminoso (led) situado junto al led +24 V ON. Enestado iluminado (led en rojo) anuncia sobrecorriente en las salidas.+24 V ON: Indicador luminoso (led) situado encima del conector X11. Enestado iluminado (led en verde) anuncia que la placa de entradas/salidas(IOs) está alimentada con +24 V.
Pulsadores y conmutadores
RESET: Pulsador que permite hacer un reset del sistema.
TERMINAL RESISTOR: Este switch ubicado junto al conector X1 (zona fron-tal del módulo) permite conectar o desconectar la resistencia terminadora delínea en comunicaciones vía RS485.
ESTADOS DE LOS LEDs DE LA TARJETA DE ENTRADAS - SALIDAS (I/O)
Corriente de salida satisfactoria
Sobrecorriente en las salidas
OC (OVER CURRENT)
Tarjeta de IOs no alimentada
Tarjeta de IOs alimentada
+24V ON
NO ILUMINADO
ILUMINADO (ROJO)
NO ILUMINADO
ILUMINADO (VERDE)
OC
+24 V
OVER CURRENT
24
V O
N
CO
MM
UN
ICA
TIO
NS
+ 5
V
CR
OW
BA
R
VB
US
OK
ON
OF
F
SWITCH TERMINAL RESISTOR (COMMUNICATIONS)
POSICIÓN DEL CONMUTADOR DE LA RESISTENCIA TERMINADORA DE LÍNEA
POSICIÓN ON Resistencia terminadora conectada
POSICIÓN OFF Resistencia terminadora desconectada
MCPi-24/112 Regulación AC Brushless digital - Ref.0910
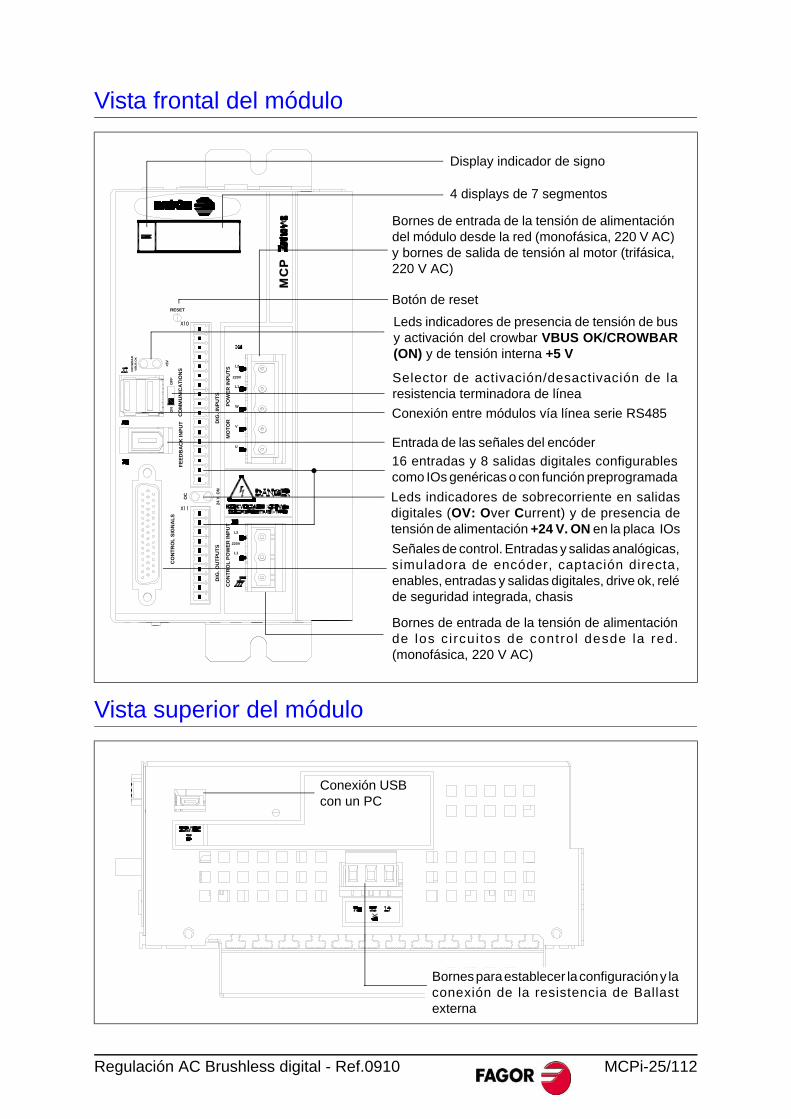
Vista frontal del módulo
Vista superior del módulo
CO
MM
UN
ICA
TIO
NS
FE
ED
BA
CK
IN
PU
T
+5V
CR
OW
BA
R
VB
US
OK
RESET
CO
NT
RO
L S
IGN
AL
S
CO
NT
RO
L P
OW
ER
INP
UT
L1
220V
L2
MO
TO
RP
OW
ER
INP
UT
S
L1
220V
L2
W
V
U
ON
OF
F
MC
P
DIG
. OU
TP
UT
SD
IG. I
NP
UT
S2
4 V
. ON
OC
X10
X11
4 displays de 7 segmentos
Display indicador de signo
Bornes de entrada de la tensión de alimentaciónde los c i rcui tos de control desde la red.(monofásica, 220 V AC)
Bornes de entrada de la tensión de alimentacióndel módulo desde la red (monofásica, 220 V AC)y bornes de salida de tensión al motor (trifásica,220 V AC)
Señales de control. Entradas y salidas analógicas,simuladora de encóder, captación directa,enables, entradas y salidas digitales, drive ok, reléde seguridad integrada, chasis
Entrada de las señales del encóder
Selector de activación/desactivación de laresistencia terminadora de línea
Conexión entre módulos vía línea serie RS485
Leds indicadores de presencia de tensión de busy activación del crowbar VBUS OK/CROWBAR(ON) y de tensión interna +5 V
Botón de reset
Leds indicadores de sobrecorriente en salidasdigitales (OV: Over Current) y de presencia detensión de alimentación +24 V. ON en la placa IOs
16 entradas y 8 salidas digitales configurablescomo IOs genéricas o con función preprogramada
Bornes para establecer la configuración y laconexión de la resistencia de Ballastexterna
Conexión USB con un PC
Regulación AC Brushless digital - Ref.0910 MCPi-25/112
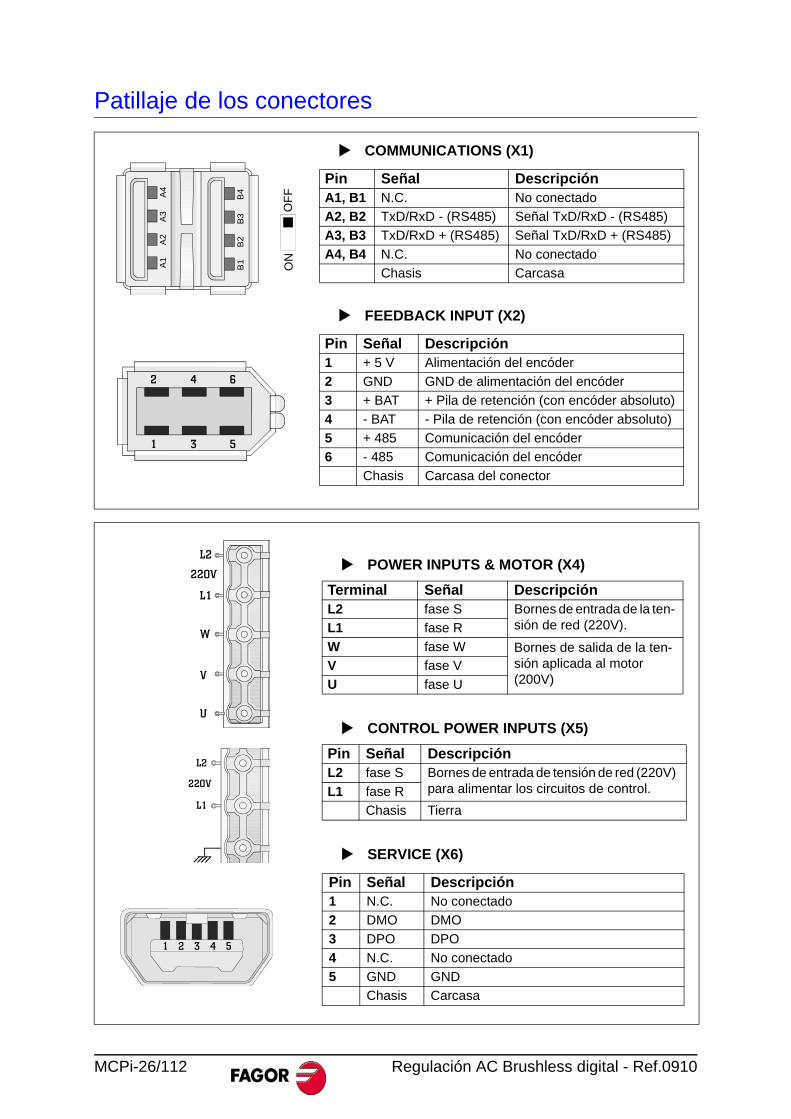
Patillaje de los conectores
COMMUNICATIONS (X1)
FEEDBACK INPUT (X2)
Pin Señal DescripciónA1, B1 N.C. No conectado
A2, B2 TxD/RxD - (RS485) Señal TxD/RxD - (RS485)
A3, B3 TxD/RxD + (RS485) Señal TxD/RxD + (RS485)
A4, B4 N.C. No conectado
Chasis Carcasa
Pin Señal Descripción1 + 5 V Alimentación del encóder
2 GND GND de alimentación del encóder
3 + BAT + Pila de retención (con encóder absoluto)
4 - BAT - Pila de retención (con encóder absoluto)
5 + 485 Comunicación del encóder
6 - 485 Comunicación del encóder
Chasis Carcasa del conector
A2
A1
A3
A4
B2
B1
B3
B4
OF
FO
N
2 4 6
1 3 5
POWER INPUTS & MOTOR (X4)
CONTROL POWER INPUTS (X5)
SERVICE (X6)
Terminal Señal DescripciónL2 fase S Bornes de entrada de la ten-
sión de red (220V).L1 fase R
W fase W Bornes de salida de la ten-sión aplicada al motor (200V)
V fase V
U fase U
Pin Señal DescripciónL2 fase S Bornes de entrada de tensión de red (220V)
para alimentar los circuitos de control.L1 fase R
Chasis Tierra
Pin Señal Descripción1 N.C. No conectado
2 DMO DMO
3 DPO DPO
4 N.C. No conectado
5 GND GND
Chasis Carcasa
1 2 3 4 5
L2
L1
220V
L2
L1
220V
W
V
U
MCPi-26/112 Regulación AC Brushless digital - Ref.0910
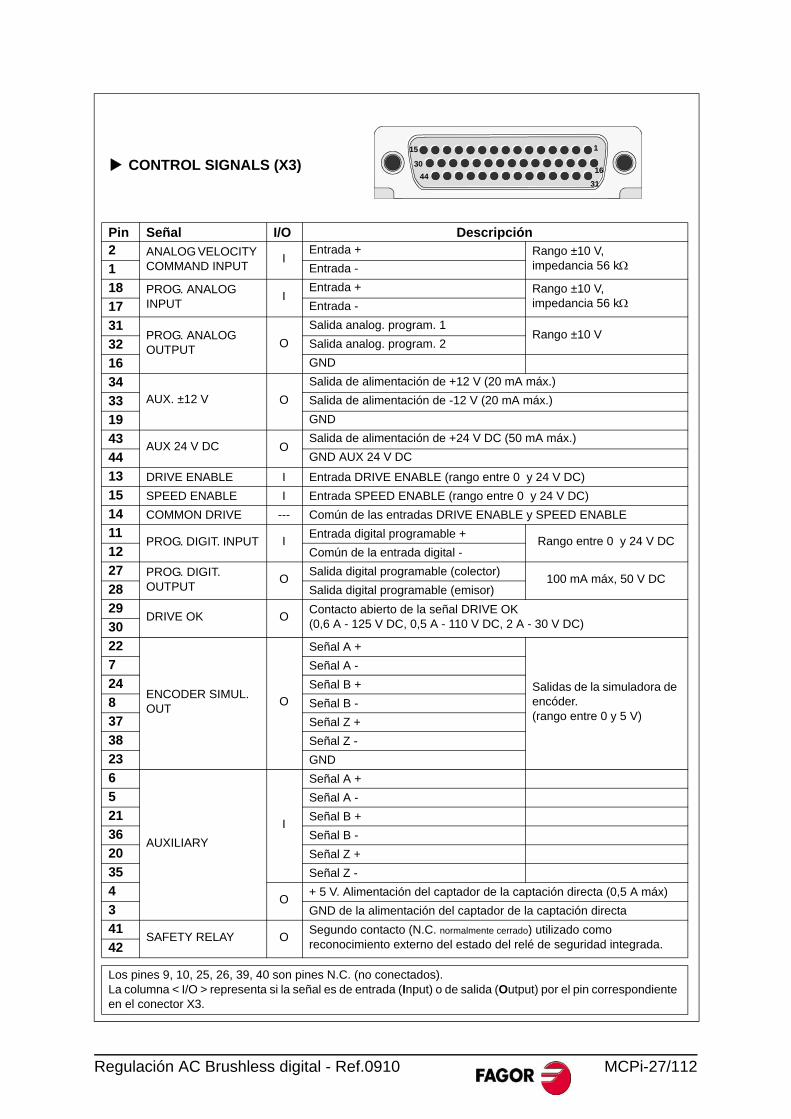
CONTROL SIGNALS (X3)
Pin Señal I/O Descripción2 ANALOG VELOCITY
COMMAND INPUTI
Entrada + Rango ±10 V, impedancia 56 k1 Entrada -
18 PROG. ANALOG INPUT
IEntrada + Rango ±10 V,
impedancia 56 k17 Entrada -
31PROG. ANALOG OUTPUT O
Salida analog. program. 1Rango ±10 V
32 Salida analog. program. 2
16 GND
34AUX. ±12 V O
Salida de alimentación de +12 V (20 mA máx.)
33 Salida de alimentación de -12 V (20 mA máx.)
19 GND
43AUX 24 V DC O
Salida de alimentación de +24 V DC (50 mA máx.)
44 GND AUX 24 V DC
13 DRIVE ENABLE I Entrada DRIVE ENABLE (rango entre 0 y 24 V DC)
15 SPEED ENABLE I Entrada SPEED ENABLE (rango entre 0 y 24 V DC)
14 COMMON DRIVE --- Común de las entradas DRIVE ENABLE y SPEED ENABLE
11PROG. DIGIT. INPUT I
Entrada digital programable +Rango entre 0 y 24 V DC
12 Común de la entrada digital -
27 PROG. DIGIT. OUTPUT
OSalida digital programable (colector)
100 mA máx, 50 V DC28 Salida digital programable (emisor)
29DRIVE OK O
Contacto abierto de la señal DRIVE OK(0,6 A - 125 V DC, 0,5 A - 110 V DC, 2 A - 30 V DC)30
22
ENCODER SIMUL. OUT
O
Señal A +
Salidas de la simuladora de encóder.(rango entre 0 y 5 V)
7 Señal A -
24 Señal B +
8 Señal B -
37 Señal Z +
38 Señal Z -
23 GND
6
AUXILIARY
I
Señal A +
5 Señal A -
21 Señal B +
36 Señal B -
20 Señal Z +
35 Señal Z -
4O
+ 5 V. Alimentación del captador de la captación directa (0,5 A máx)
3 GND de la alimentación del captador de la captación directa
41SAFETY RELAY O
Segundo contacto (N.C. normalmente cerrado) utilizado como reconocimiento externo del estado del relé de seguridad integrada.42
Los pines 9, 10, 25, 26, 39, 40 son pines N.C. (no conectados).La columna < I/O > representa si la señal es de entrada (Input) o de salida (Output) por el pin correspondiente en el conector X3.
1
16
3144
30
15
Regulación AC Brushless digital - Ref.0910 MCPi-27/112
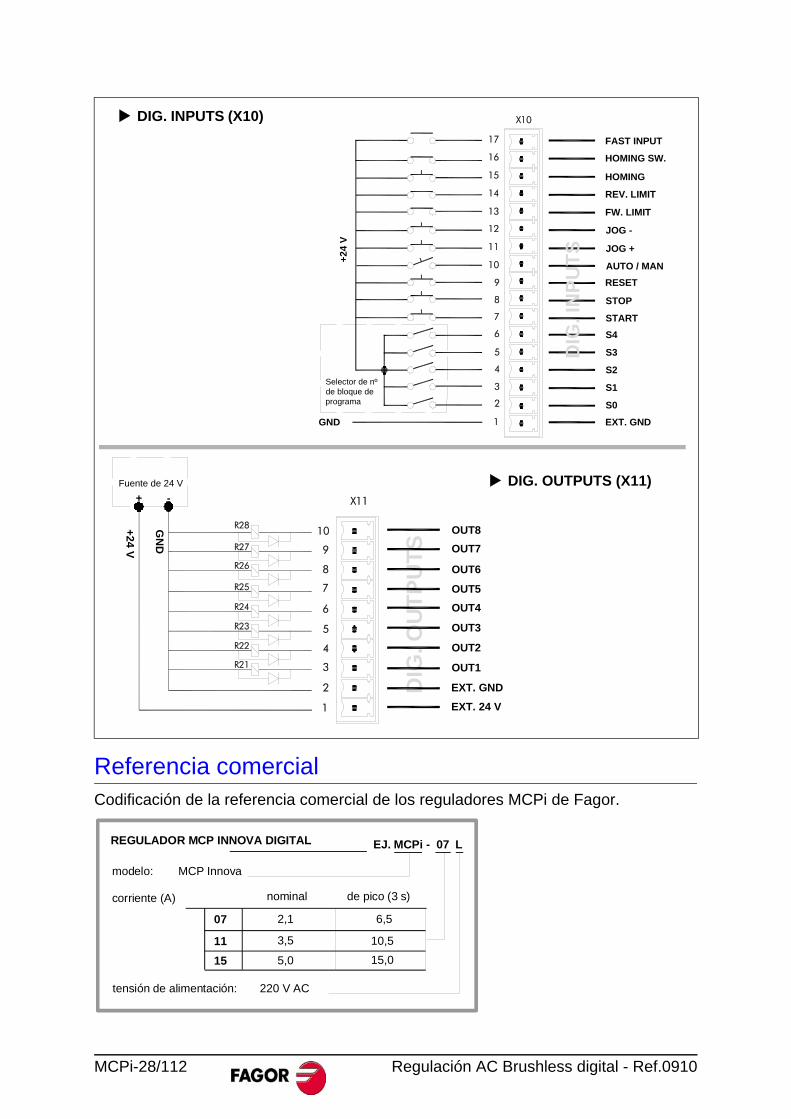
Referencia comercialCodificación de la referencia comercial de los reguladores MCPi de Fagor.
X10
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
EXT. GND
S0
S1
S2
S3
S4
START
STOP
RESET
AUTO / MAN
JOG +
JOG -
FW. LIMIT
REV. LIMIT
HOMING
HOMING SW.
FAST INPUT
GND
+2
4 V
Selector de nº de bloque de programa
DIG
. IN
PU
TS
X11
1
10
2
3
4
5
6
7
8
9
DIG
. O
UT
PU
TS
EXT. 24 V
EXT. GND
OUT1
OUT2
OUT3
OUT4
OUT5
OUT6
OUT7
OUT8+24
V
GN
D
+ -
Fuente de 24 V
R28
R27
R26
R25
R24
R23
R22
R21
DIG. INPUTS (X10)
DIG. OUTPUTS (X11)
REGULADOR MCP INNOVA DIGITAL
modelo:
corriente (A)
tensión de alimentación: 220 V AC
MCP Innova
nominal de pico (3 s)
EJ. MCPi - 07 L
07
11
15
2,1
3,5
5,0
6,5
10,5
15,0
MCPi-28/112 Regulación AC Brushless digital - Ref.0910
INSTALACIÓNConsideraciones generales
En el motor
Elimínese la pintura antioxidante del rotor y la brida antes de la instalación del motor enmáquina.
El motor admitirá las formas de montaje brida: IM B5 e IM V1.
Vigilar las condiciones ambientales señaladas en el apartado de característicasgenerales y además:
Ubicar el motor en un lugar seco, limpio y accesible para facilitar labores demantenimiento.
Facilitar su refrigeración.
Evitar ambientes corrosivos e inflamables.
Proteger el motor con una cubierta ante salpicaduras.
Utilizar acoplamientos flexibles para transmisión directa.
Evitar cargas radiales y axiales en el eje del motor.
En el regulador
El módulo debe ser instalado en un armario eléctrico, limpio y seco, libre de polvo,aceites u otros contaminantes.
Nunca debe instalarse en entornos con presencia de gases inflamables. Evitar elexceso de calor y de humedad. La temperatura ambiente no debe superar nunca los45°C (113°F). Instalar los módulos en forma vertical, evitar vibraciones y respetar losespacios libres para facilitar la circulación del aire. Véase figura.
Recuérdese que el grado de protección es IP 55 (estándar), excluida la seccióndel eje.
ATENCIÓN: ¡ Asegúrese de no golpear sobre el eje en la instalaciónde poleas o engranajes para la transmisión !
Empléese alguna herramienta que se apoye enel agujero roscado del eje para la inserción de lapolea o engranaje.
Recuérdese que el grado de protección es IP 20.
Regulación AC Brushless digital - Ref.0910 MCPi-29/112
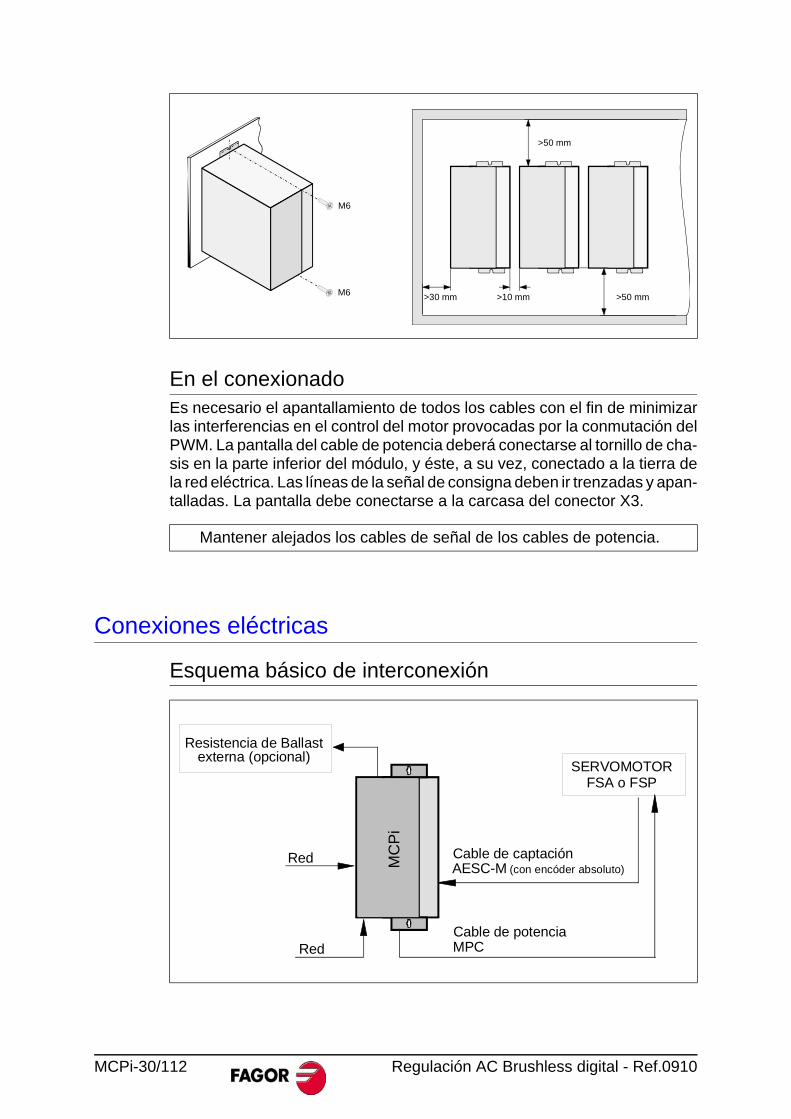
En el conexionadoEs necesario el apantallamiento de todos los cables con el fin de minimizarlas interferencias en el control del motor provocadas por la conmutación delPWM. La pantalla del cable de potencia deberá conectarse al tornillo de cha-sis en la parte inferior del módulo, y éste, a su vez, conectado a la tierra dela red eléctrica. Las líneas de la señal de consigna deben ir trenzadas y apan-talladas. La pantalla debe conectarse a la carcasa del conector X3.
Conexiones eléctricas
Esquema básico de interconexión
M6
M6
>50 mm
>50 mm>10 mm>30 mm
Mantener alejados los cables de señal de los cables de potencia.
Resistencia de Ballast externa (opcional)
MC
Pi
Cable de captaciónRed
Red
SERVOMOTORFSA o FSP
Cable de potenciaMPC
AESC-M (con encóder absoluto)
MCPi-30/112 Regulación AC Brushless digital - Ref.0910
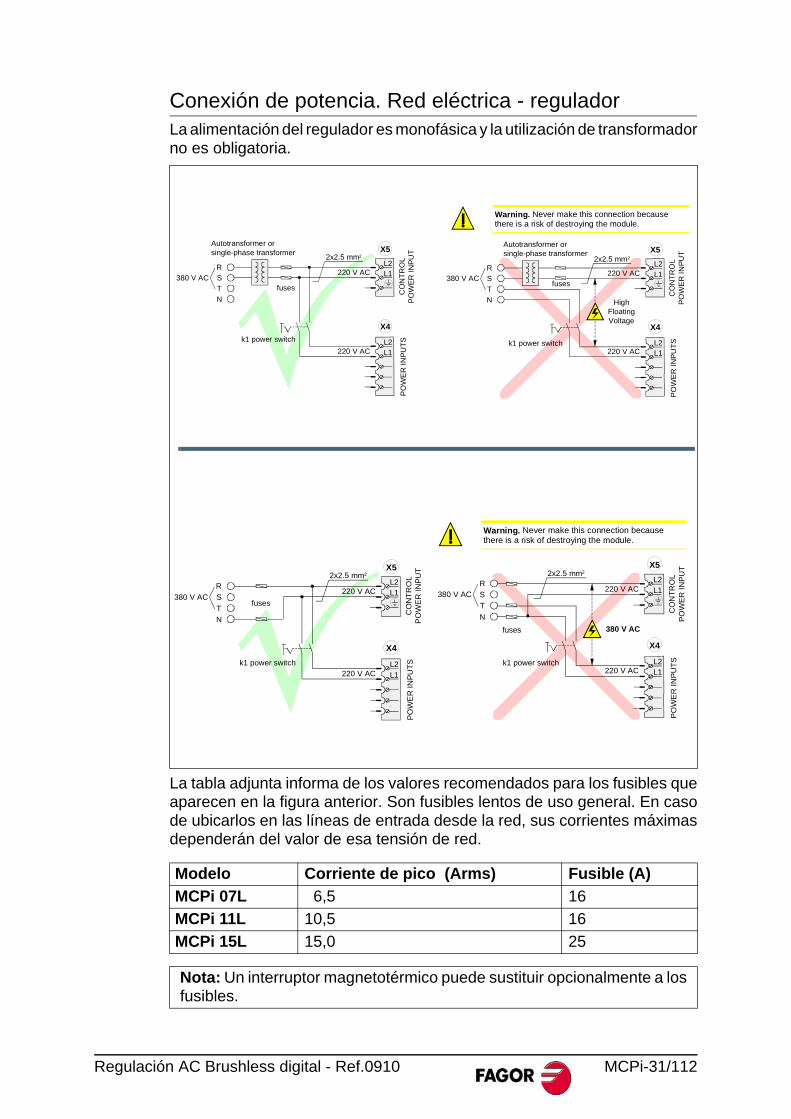
Conexión de potencia. Red eléctrica - reguladorLa alimentación del regulador es monofásica y la utilización de transformadorno es obligatoria.
La tabla adjunta informa de los valores recomendados para los fusibles queaparecen en la figura anterior. Son fusibles lentos de uso general. En casode ubicarlos en las líneas de entrada desde la red, sus corrientes máximasdependerán del valor de esa tensión de red.
Modelo Corriente de pico (Arms) Fusible (A)
MCPi 07L 6,5 16
MCPi 11L 10,5 16
MCPi 15L 15,0 25
Nota: Un interruptor magnetotérmico puede sustituir opcionalmente a losfusibles.
X5
L2L1
L2L1
X4
220 V ACR
S
T
N
380 V AC
CO
NT
RO
LP
OW
ER
IN
PU
TP
OW
ER
IN
PU
TS
X5
L2L1
L2L1
X4
220 V AC
220 V AC
R
S
T
N
380 V AC
High FloatingVoltage
CO
NT
RO
LP
OW
ER
IN
PU
TP
OW
ER
IN
PU
TS
220 V AC
Autotransformer orsingle-phase transformer
Autotransformer orsingle-phase transformer
Warning. Never make this connection because there is a risk of destroying the module.
k1 power switch
fuses
2x2.5 mm2
k1 power switch
fuses
2x2.5 mm2
X5
L2L1
L2L1
X4
220 V ACR
S
T
N
380 V AC
CO
NT
RO
LP
OW
ER
INP
UT
PO
WE
R I
NP
UT
S
X5
L2L1
L2L1
X4
220 V AC
220 V AC
R
S
T
N
380 V AC
380 V AC
CO
NT
RO
LP
OW
ER
IN
PU
TP
OW
ER
IN
PU
TS
220 V AC
Warning. Never make this connection because there is a risk of destroying the module.
k1 power switch k1 power switch
2x2.5 mm2 2x2.5 mm2
fuses
fuses
Regulación AC Brushless digital - Ref.0910 MCPi-31/112
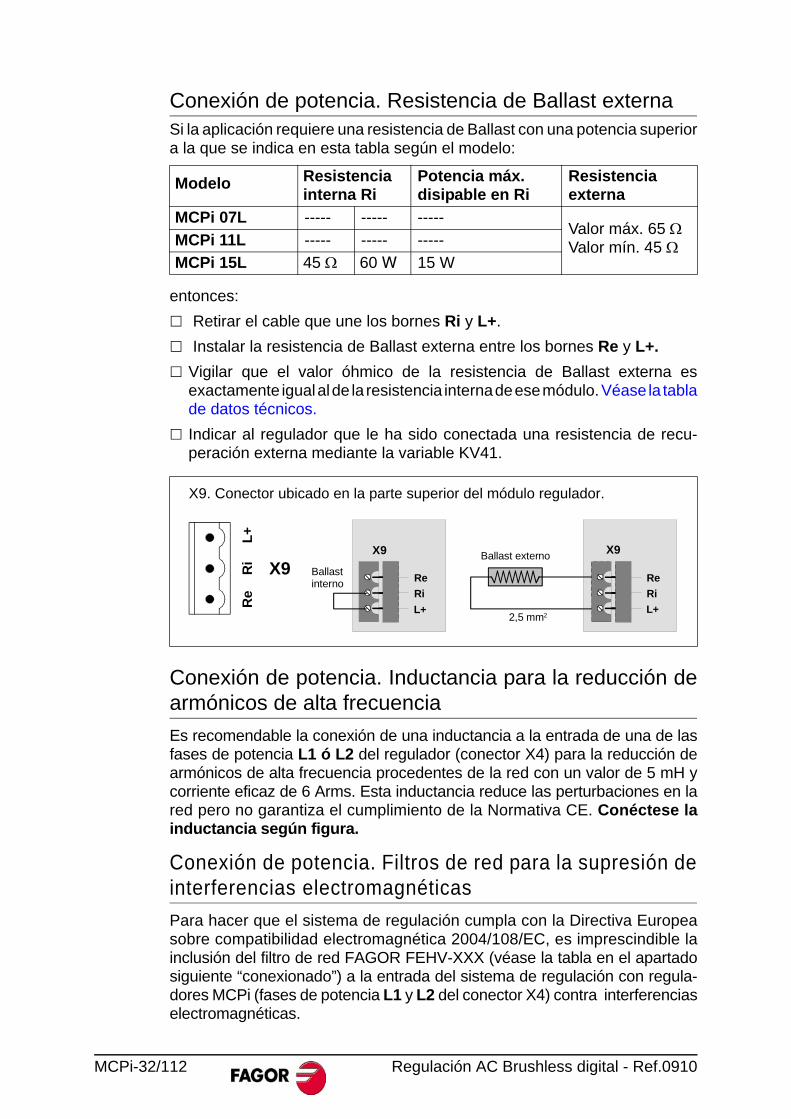
Conexión de potencia. Resistencia de Ballast externaSi la aplicación requiere una resistencia de Ballast con una potencia superiora la que se indica en esta tabla según el modelo:
entonces:
Retirar el cable que une los bornes Ri y L+.
Instalar la resistencia de Ballast externa entre los bornes Re y L+.
Vigilar que el valor óhmico de la resistencia de Ballast externa esexactamente igual al de la resistencia interna de ese módulo. Véase la tablade datos técnicos.
Indicar al regulador que le ha sido conectada una resistencia de recu-peración externa mediante la variable KV41.
Conexión de potencia. Inductancia para la reducción dearmónicos de alta frecuencia
Es recomendable la conexión de una inductancia a la entrada de una de lasfases de potencia L1 ó L2 del regulador (conector X4) para la reducción dearmónicos de alta frecuencia procedentes de la red con un valor de 5 mH ycorriente eficaz de 6 Arms. Esta inductancia reduce las perturbaciones en lared pero no garantiza el cumplimiento de la Normativa CE. Conéctese lainductancia según figura.
Conexión de potencia. Filtros de red para la supresión deinterferencias electromagnéticas
Para hacer que el sistema de regulación cumpla con la Directiva Europeasobre compatibilidad electromagnética 2004/108/EC, es imprescindible lainclusión del filtro de red FAGOR FEHV-XXX (véase la tabla en el apartadosiguiente “conexionado”) a la entrada del sistema de regulación con regula-dores MCPi (fases de potencia L1 y L2 del conector X4) contra interferenciaselectromagnéticas.
Modelo Resistencia interna Ri
Potencia máx. disipable en Ri
Resistencia externa
MCPi 07L ----- ----- -----Valor máx. 65 Valor mín. 45 MCPi 11L ----- ----- -----
MCPi 15L 45 60 W 15 W R
eR
iL
+
X9
L+
Re
Ri
2,5 mm2
Ballast externo
L+
Re
Ri
X9
Ballastinterno
X9
X9. Conector ubicado en la parte superior del módulo regulador.
MCPi-32/112 Regulación AC Brushless digital - Ref.0910
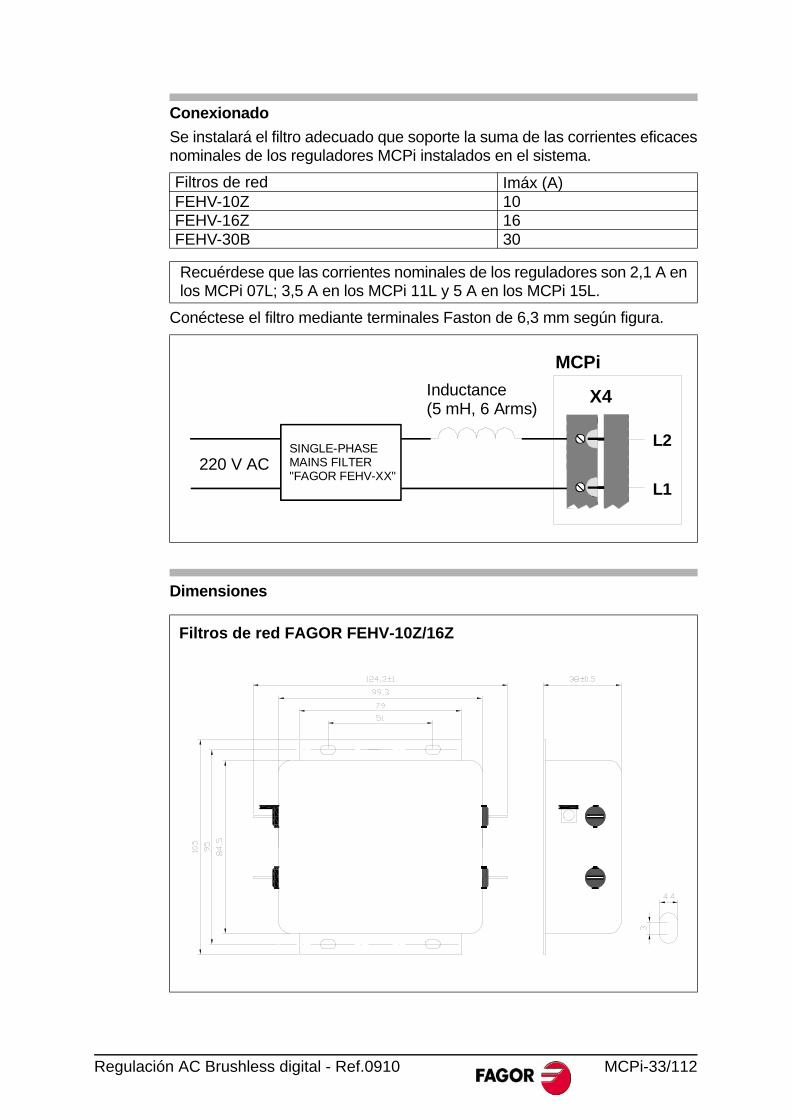
Conexionado
Se instalará el filtro adecuado que soporte la suma de las corrientes eficacesnominales de los reguladores MCPi instalados en el sistema.
Conéctese el filtro mediante terminales Faston de 6,3 mm según figura.
Dimensiones
Filtros de red Imáx (A)FEHV-10Z 10FEHV-16Z 16FEHV-30B 30
Recuérdese que las corrientes nominales de los reguladores son 2,1 A enlos MCPi 07L; 3,5 A en los MCPi 11L y 5 A en los MCPi 15L.
L1
L2
Inductance(5 mH, 6 Arms)
X4
220 V ACSINGLE-PHASEMAINS FILTER"FAGOR FEHV-XX"
MCPi
Filtros de red FAGOR FEHV-10Z/16Z
Regulación AC Brushless digital - Ref.0910 MCPi-33/112
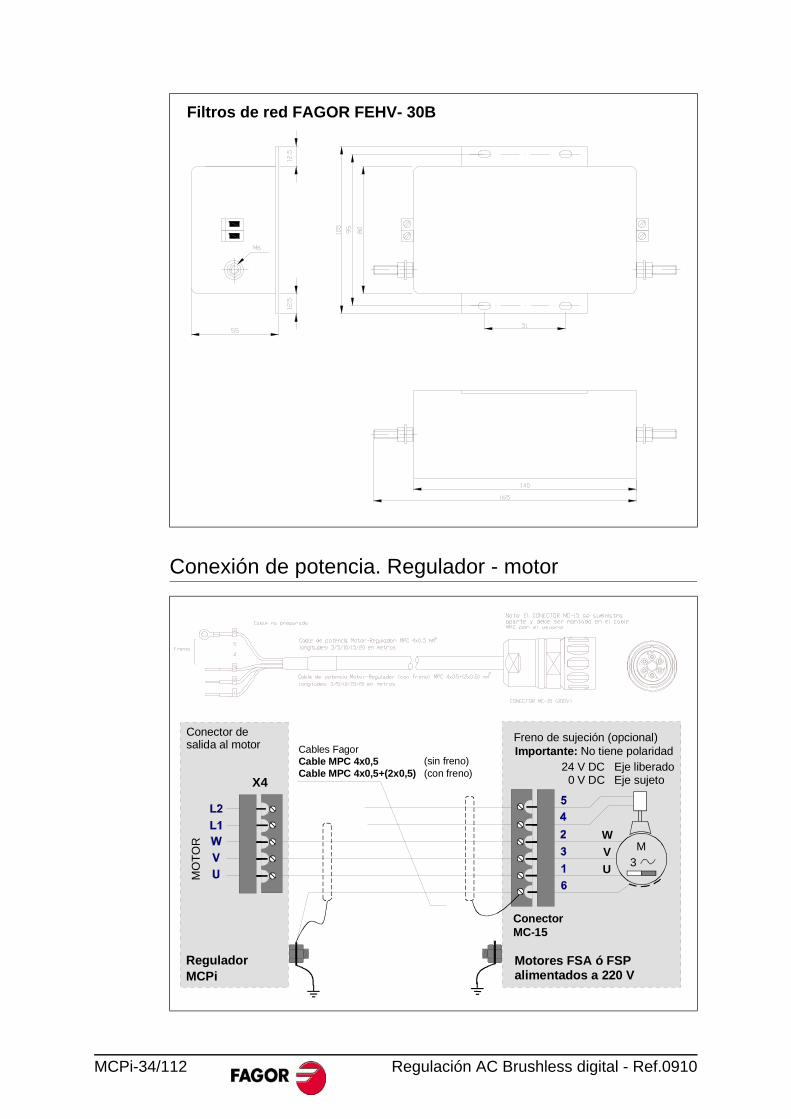
Conexión de potencia. Regulador - motor
Filtros de red FAGOR FEHV- 30B
Cables FagorCable MPC 4x0,5Cable MPC 4x0,5+(2x0,5)
M3
Freno de sujeción (opcional)
24 V DC Eje liberado 0 V DC Eje sujeto
U
W
V
X4
MCPi
MO
TO
R
Motores FSA ó FSPalimentados a 220 V
Regulador
Importante: No tiene polaridad
Conector de salida al motor
(con freno)(sin freno)
ConectorMC-15
MCPi-34/112 Regulación AC Brushless digital - Ref.0910
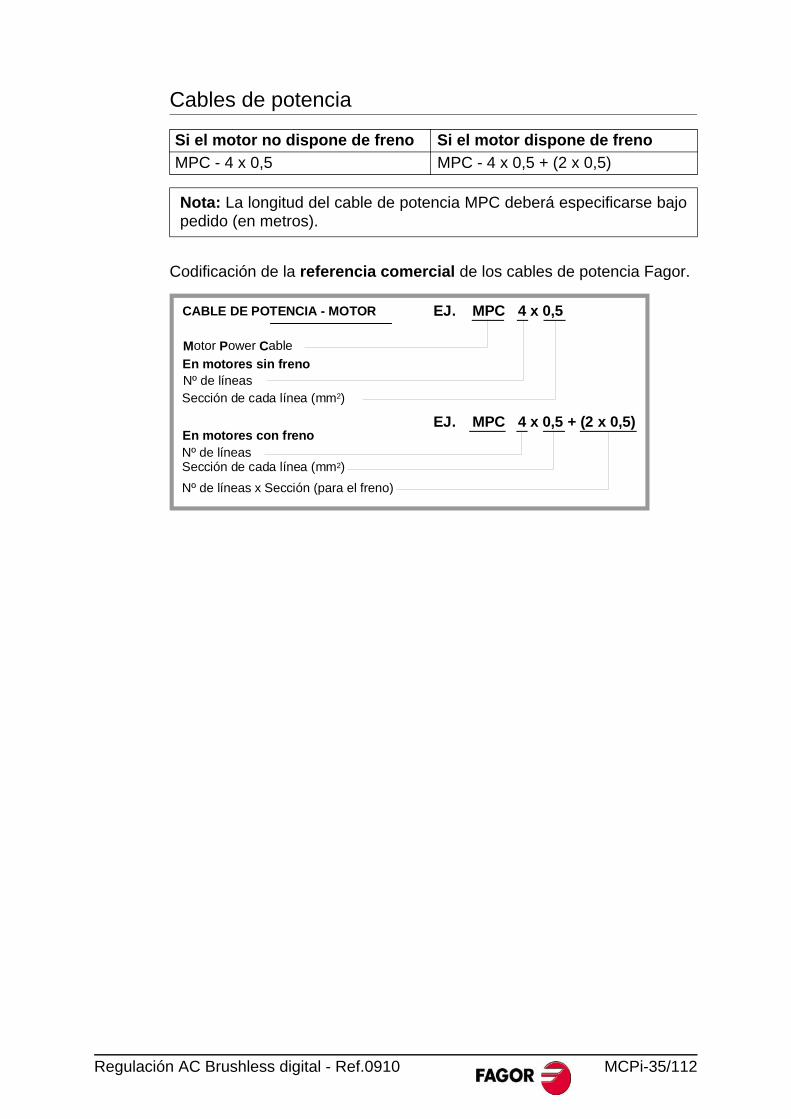
Cables de potencia
Codificación de la referencia comercial de los cables de potencia Fagor.
Si el motor no dispone de freno Si el motor dispone de freno
MPC - 4 x 0,5 MPC - 4 x 0,5 + (2 x 0,5)
Nota: La longitud del cable de potencia MPC deberá especificarse bajopedido (en metros).
CABLE DE POTENCIA - MOTOR
Nº de líneas
Motor Power Cable
EJ. MPC 4 x 0,5
Sección de cada línea (mm2)
EJ. MPC 4 x 0,5 + (2 x 0,5)
En motores sin freno
En motores con frenoNº de líneasSección de cada línea (mm2)
Nº de líneas x Sección (para el freno)
Regulación AC Brushless digital - Ref.0910 MCPi-35/112
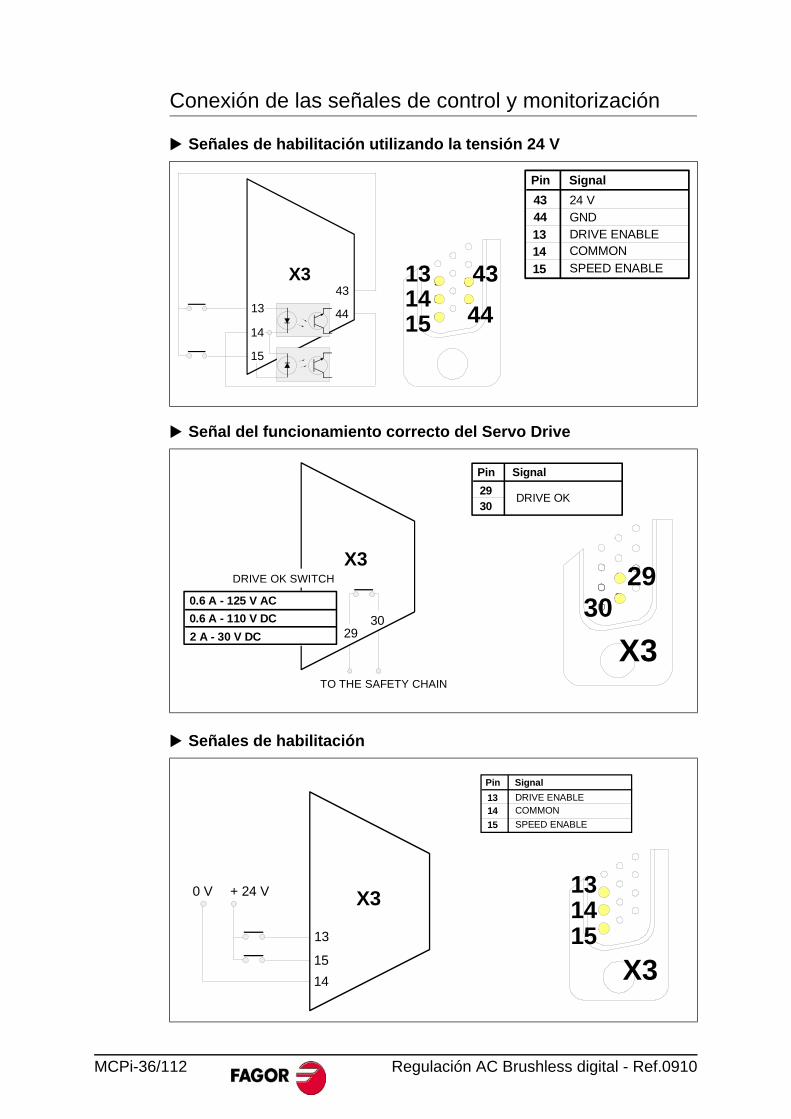
Conexión de las señales de control y monitorización
Señales de habilitación utilizando la tensión 24 V
Señal del funcionamiento correcto del Servo Drive
Señales de habilitación
44
43131415
X3
44
43
14
15
13
SignalPin
43 24 VGND
13 DRIVE ENABLECOMMON
SPEED ENABLE
44
14
15
X3
3029
DRIVE OK SWITCH 2930
X3TO THE SAFETY CHAIN
SignalPin
29DRIVE OK
30
0.6 A - 125 V AC
0.6 A - 110 V DC
2 A - 30 V DC
X3
15
13
131415
X3
+ 24 V
14
0 V
SignalPin
13 DRIVE ENABLE
14
15
COMMON
SPEED ENABLE
MCPi-36/112 Regulación AC Brushless digital - Ref.0910
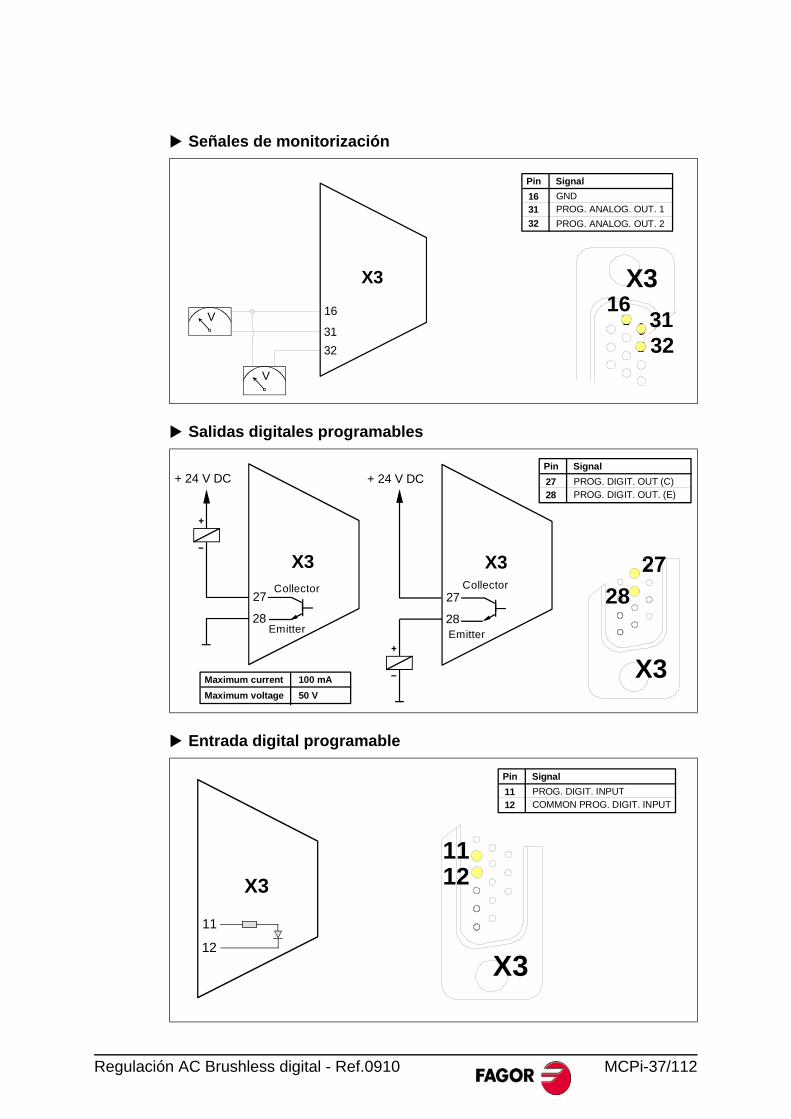
Señales de monitorización
Salidas digitales programables
Entrada digital programable
16X3
3132
X3
31
16
32
V
V
SignalPin
16 GND
31
32
PROG. ANALOG. OUT. 1
PROG. ANALOG. OUT. 2
X3
28
27
+ 24 V DC
Collector
Emitter
28
X3
X3
28
27
+ 24 V DC
Collector
Emitter
SignalPin
27 PROG. DIGIT. OUT (C)
28 PROG. DIGIT. OUT. (E)
100 mAMaximum current
Maximum voltage 50 V
X3
12
11
1112
X3
SignalPin
11 PROG. DIGIT. INPUT
12 COMMON PROG. DIGIT. INPUT
Regulación AC Brushless digital - Ref.0910 MCPi-37/112
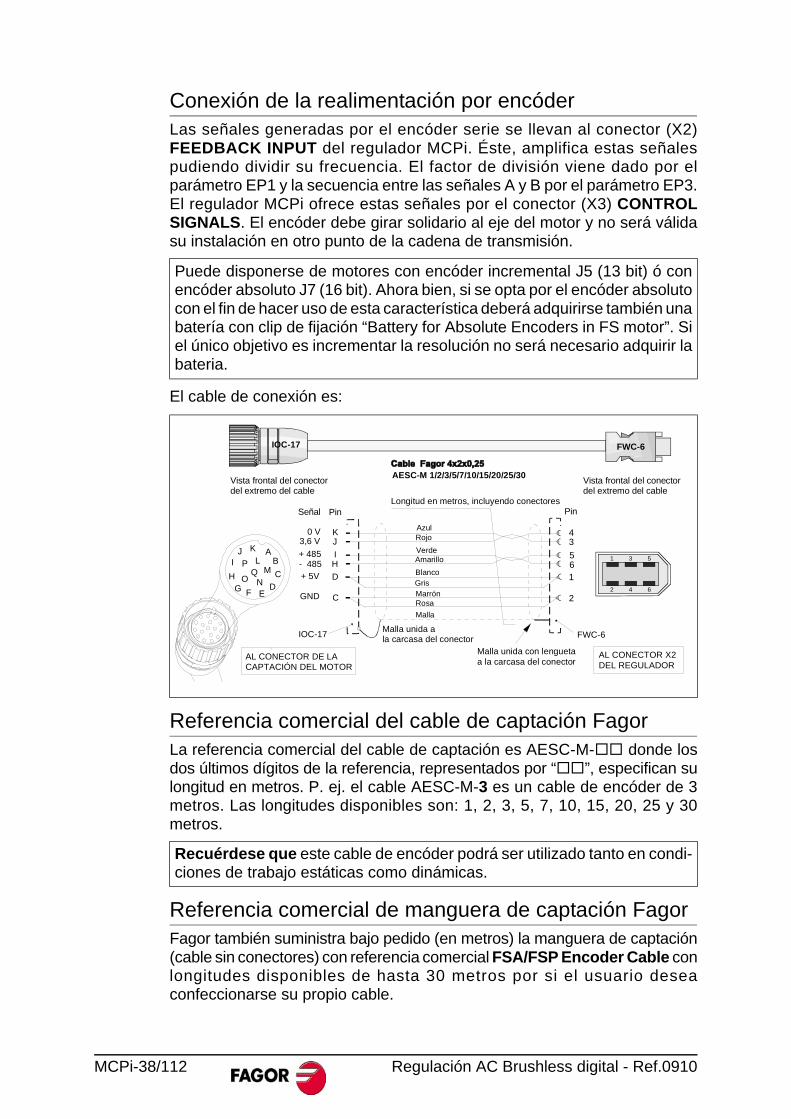
Conexión de la realimentación por encóderLas señales generadas por el encóder serie se llevan al conector (X2)FEEDBACK INPUT del regulador MCPi. Éste, amplifica estas señalespudiendo dividir su frecuencia. El factor de división viene dado por elparámetro EP1 y la secuencia entre las señales A y B por el parámetro EP3.El regulador MCPi ofrece estas señales por el conector (X3) CONTROLSIGNALS. El encóder debe girar solidario al eje del motor y no será válidasu instalación en otro punto de la cadena de transmisión.
El cable de conexión es:
Referencia comercial del cable de captación FagorLa referencia comercial del cable de captación es AESC-M- donde losdos últimos dígitos de la referencia, representados por “”, especifican sulongitud en metros. P. ej. el cable AESC-M-3 es un cable de encóder de 3metros. Las longitudes disponibles son: 1, 2, 3, 5, 7, 10, 15, 20, 25 y 30metros.
Referencia comercial de manguera de captación FagorFagor también suministra bajo pedido (en metros) la manguera de captación(cable sin conectores) con referencia comercial FSA/FSP Encoder Cable conlongitudes disponibles de hasta 30 metros por si el usuario deseaconfeccionarse su propio cable.
Puede disponerse de motores con encóder incremental J5 (13 bit) ó conencóder absoluto J7 (16 bit). Ahora bien, si se opta por el encóder absolutocon el fin de hacer uso de esta característica deberá adquirirse también unabatería con clip de fijación “Battery for Absolute Encoders in FS motor”. Siel único objetivo es incrementar la resolución no será necesario adquirir labateria.
Recuérdese que este cable de encóder podrá ser utilizado tanto en condi-ciones de trabajo estáticas como dinámicas.
Vista frontal del conector del extremo del cable
65+ 485 I
H
Verde
AL CONECTOR X2 DEL REGULADOR
AL CONECTOR DE LACAPTACIÓN DEL MOTOR
Longitud en metros, incluyendo conectoresPinPinSeñal
Amarillo
Blanco
Marrón
Malla
- 485+ 5V D
CGND
Malla unida ala carcasa del conector
2
1
AESC-M 1/2/3/5/7/10/15/20/25/30
Malla unida con lengueta a la carcasa del conector
ML
AK
IJ
HG F E
D
C
BP
NQ
O
Vista frontal del conector del extremo del cable
1 3 5
2 4 6
FWC-6IOC-17
0 V KJ3,6 V
AzulRojo 3
4
Gris
Rosa
FWC-6IOC-17
MCPi-38/112 Regulación AC Brushless digital - Ref.0910
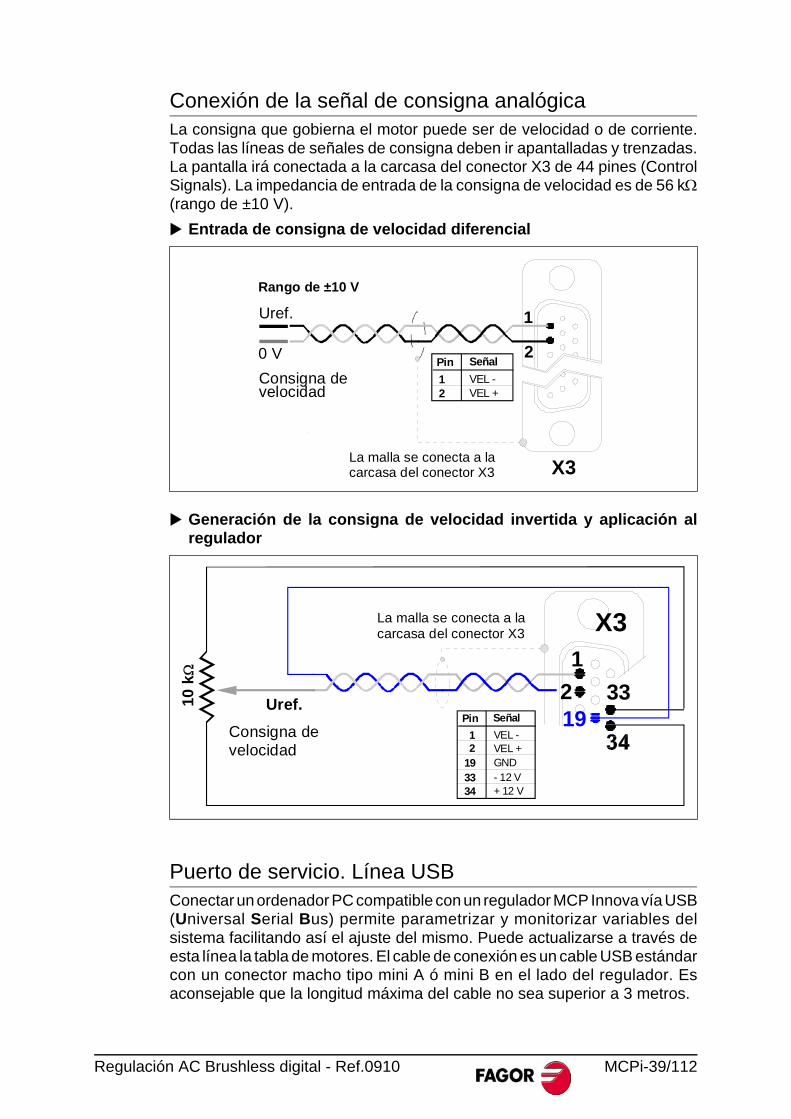
Conexión de la señal de consigna analógicaLa consigna que gobierna el motor puede ser de velocidad o de corriente.Todas las líneas de señales de consigna deben ir apantalladas y trenzadas.La pantalla irá conectada a la carcasa del conector X3 de 44 pines (ControlSignals). La impedancia de entrada de la consigna de velocidad es de 56 k(rango de ±10 V).
Entrada de consigna de velocidad diferencial
Generación de la consigna de velocidad invertida y aplicación alregulador
Puerto de servicio. Línea USBConectar un ordenador PC compatible con un regulador MCP Innova vía USB(Universal Serial Bus) permite parametrizar y monitorizar variables delsistema facilitando así el ajuste del mismo. Puede actualizarse a través deesta línea la tabla de motores. El cable de conexión es un cable USB estándarcon un conector macho tipo mini A ó mini B en el lado del regulador. Esaconsejable que la longitud máxima del cable no sea superior a 3 metros.
1Uref.
2
Rango de ±10 V
Consigna develocidad
X3
0 V
La malla se conecta a lacarcasa del conector X3
SeñalPin
1 VEL -2 VEL +
1
2
X3
1933
Uref.
La malla se conecta a lacarcasa del conector X3
10 k
SeñalPin
1 VEL -2 VEL +
19 GND33 - 12 V34 + 12 V
Consigna develocidad
Regulación AC Brushless digital - Ref.0910 MCPi-39/112
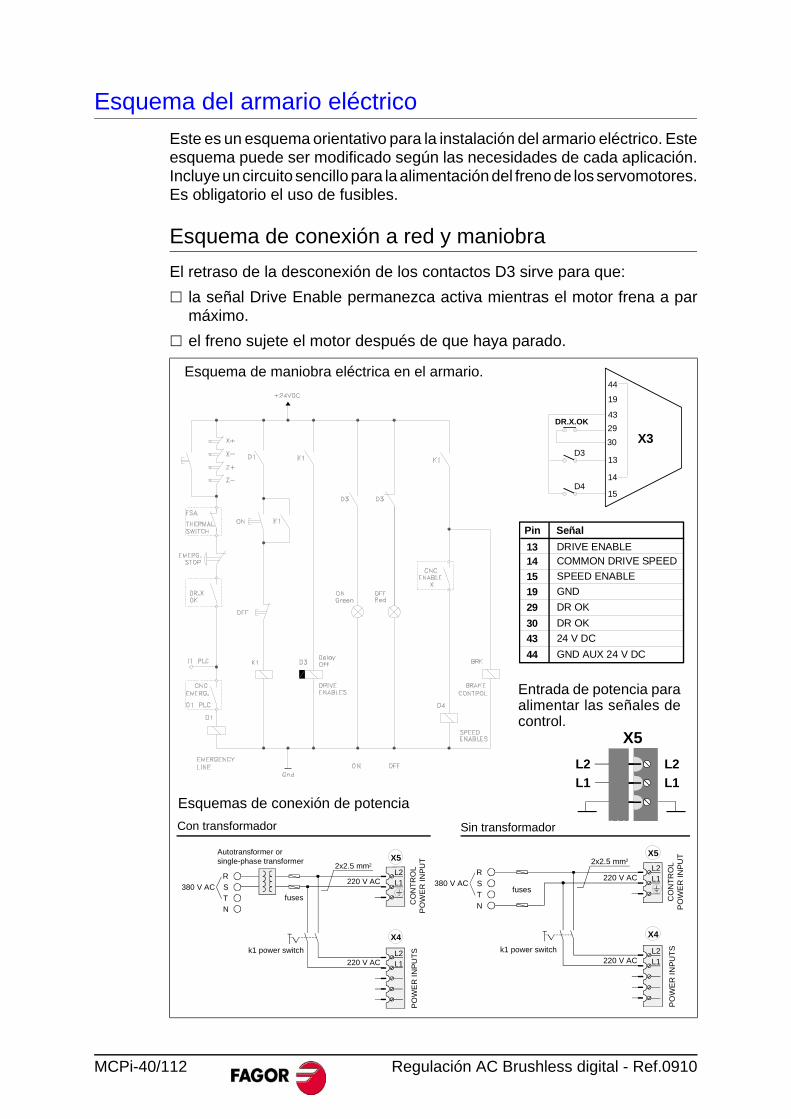
Esquema del armario eléctrico
Este es un esquema orientativo para la instalación del armario eléctrico. Esteesquema puede ser modificado según las necesidades de cada aplicación.Incluye un circuito sencillo para la alimentación del freno de los servomotores.Es obligatorio el uso de fusibles.
Esquema de conexión a red y maniobra
El retraso de la desconexión de los contactos D3 sirve para que:
la señal Drive Enable permanezca activa mientras el motor frena a parmáximo.
el freno sujete el motor después de que haya parado.
SeñalPin
13 DRIVE ENABLE
14
15
COMMON DRIVE SPEED
SPEED ENABLE
19 GND
29 DR OK
30 DR OK
43 24 V DC
44 GND AUX 24 V DC
X3
14
15
13
44
19
43
29
30D3
D4
L2
L1
L2
L1
X5
Entrada de potencia paraalimentar las señales decontrol.
Esquemas de conexión de potencia
Esquema de maniobra eléctrica en el armario.
DR.X.OK
Con transformador
X5
L2L1
L2L1
X4
220 V ACR
S
T
N
380 V AC
CO
NT
RO
LP
OW
ER
INP
UT
PO
WE
R IN
PU
TS
220 V AC
Autotransformer orsingle-phase transformer
k1 power switch
fuses
2x2.5 mm2
Sin transformador
X5
L2L1
L2L1
X4
220 V ACR
S
T
N
380 V AC
CO
NT
RO
LP
OW
ER
IN
PU
TP
OW
ER
INP
UT
S
220 V ACk1 power switch
2x2.5 mm2
fuses
MCPi-40/112 Regulación AC Brushless digital - Ref.0910
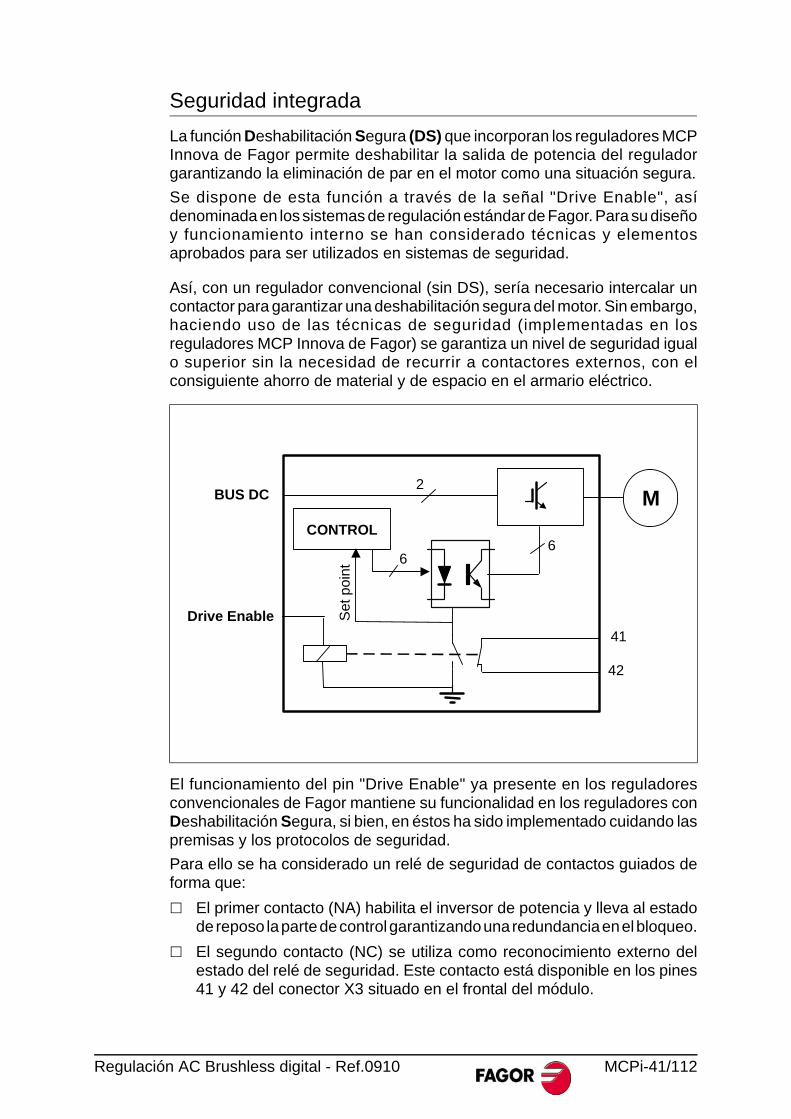
Seguridad integrada
La función Deshabilitación Segura (DS) que incorporan los reguladores MCPInnova de Fagor permite deshabilitar la salida de potencia del reguladorgarantizando la eliminación de par en el motor como una situación segura.
Se dispone de esta función a través de la señal "Drive Enable", asídenominada en los sistemas de regulación estándar de Fagor. Para su diseñoy funcionamiento interno se han considerado técnicas y elementosaprobados para ser utilizados en sistemas de seguridad.
Así, con un regulador convencional (sin DS), sería necesario intercalar uncontactor para garantizar una deshabilitación segura del motor. Sin embargo,haciendo uso de las técnicas de seguridad (implementadas en losreguladores MCP Innova de Fagor) se garantiza un nivel de seguridad igualo superior sin la necesidad de recurrir a contactores externos, con elconsiguiente ahorro de material y de espacio en el armario eléctrico.
El funcionamiento del pin "Drive Enable" ya presente en los reguladoresconvencionales de Fagor mantiene su funcionalidad en los reguladores conDeshabilitación Segura, si bien, en éstos ha sido implementado cuidando laspremisas y los protocolos de seguridad.
Para ello se ha considerado un relé de seguridad de contactos guiados deforma que:
El primer contacto (NA) habilita el inversor de potencia y lleva al estadode reposo la parte de control garantizando una redundancia en el bloqueo.
El segundo contacto (NC) se utiliza como reconocimiento externo delestado del relé de seguridad. Este contacto está disponible en los pines41 y 42 del conector X3 situado en el frontal del módulo.
6
2
6
BUS DC
Drive Enable
CONTROL
Set
poi
nt
M
41
42
Regulación AC Brushless digital - Ref.0910 MCPi-41/112
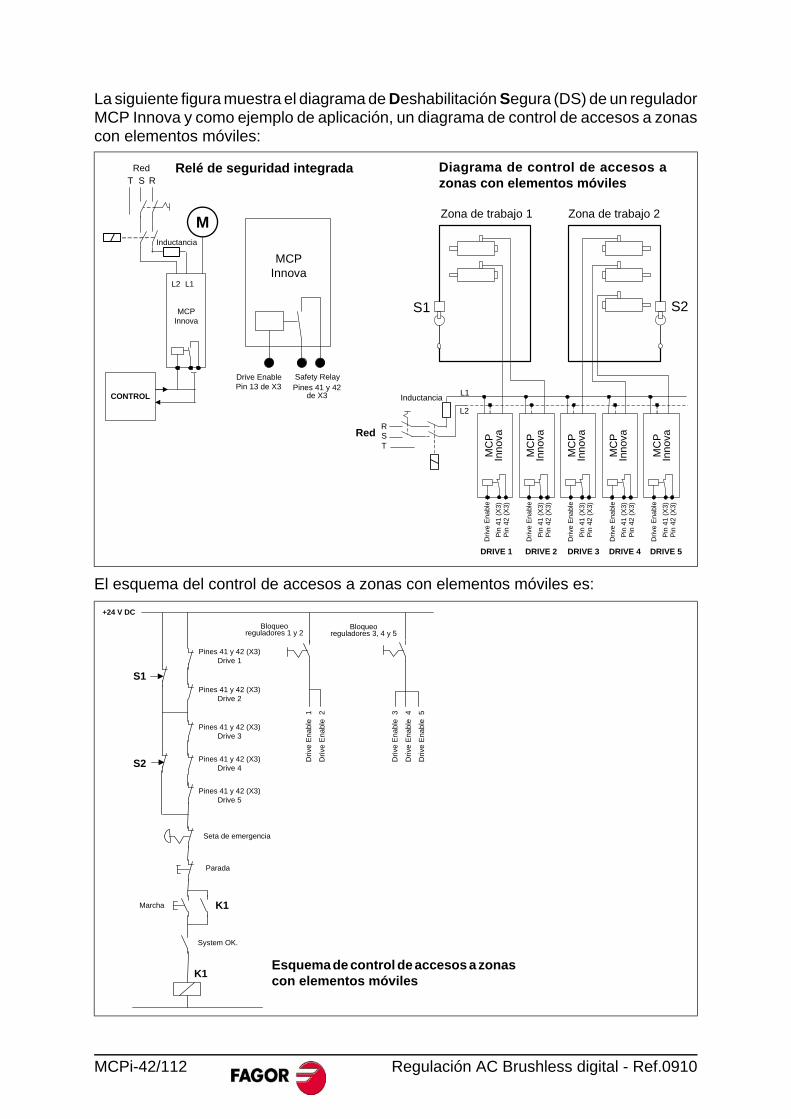
La siguiente figura muestra el diagrama de Deshabilitación Segura (DS) de un reguladorMCP Innova y como ejemplo de aplicación, un diagrama de control de accesos a zonascon elementos móviles:
El esquema del control de accesos a zonas con elementos móviles es:
DRIVE 1
Zona de trabajo 1 Zona de trabajo 2
S1
MC
P
Inno
va
DRIVE 2 DRIVE 3 DRIVE 4 DRIVE 5
MC
P
Inno
va
MC
P
Inno
va
MC
P
Inno
va
MC
P
Inno
vaRed
L2
L1
RST
S2
Inductancia
Driv
e E
nabl
e
Pin
41
(X3)
Pin
42
(X3)
Driv
e E
nabl
e
Pin
41
(X3)
Pin
42
(X3)
Driv
e E
nabl
e
Pin
41
(X3)
Pin
42
(X3)
Driv
e E
nabl
e
Pin
41
(X3)
Pin
42
(X3)
Driv
e E
nabl
e
Pin
41
(X3)
Pin
42
(X3)
{
M
Red
CONTROL
MCPInnova
L2 L1
RST
Pines 41 y 42 de X3
Drive EnablePin 13 de X3
Safety Relay
MCPInnova
Inductancia
Relé de seguridad integrada Diagrama de control de accesos azonas con elementos móviles
S1
K1
Pines 41 y 42 (X3) Drive 1
+24 V DC
Seta de emergencia
Bloqueo reguladores 1 y 2
Bloqueo reguladores 3, 4 y 5
Driv
e E
nab
le 1
Driv
e E
nab
le 2
Driv
e E
nab
le 3
Driv
e E
nab
le 4
Driv
e E
nab
le 5
Parada
Marcha
System OK.
K1
Pines 41 y 42 (X3) Drive 2
Pines 41 y 42 (X3) Drive 3
Pines 41 y 42 (X3) Drive 4
Pines 41 y 42 (X3) Drive 5
S2
Esquema de control de accesos a zonascon elementos móviles
MCPi-42/112 Regulación AC Brushless digital - Ref.0910
Inicialización y ajuste
Conexión al PC vía USB. WinDDSSetup
El WinDDSSetup es una aplicación para PC de Fagor. El usuario, desde lainterfaz que ofrece la aplicación, podrá leer, modificar, almacenar en archivoPC y volcar desde archivo PC todos los parámetros y variables del reguladorademás de conocer el estado del conjunto regulador-motor, facilitando asíla labor de ajuste final del sistema de regulación de una manera cómoda yrápida. A su vez, facilita la fabricación en serie de máquinas que disponende equipos MCP Innova. Al mismo tiempo que se instala el softwareWinDDSSetup también son instalados los drivers USB. Estos drivers generanun puerto virtual COM adicional que se suma a los que ya están siendoutilizados por el PC y estará presente siempre y cuando el equipo estéconectado y disponga de tensión de control ó de potencia. Por esta razón,es conveniente primero conectar el equipo y después ejecutar laaplicación WinDDSSetup.
Nótese que cuando el equipo es conectado por primera vez al PC, el sistemaoperativo mostrará dos veces el mensaje <nuevo hardware detectado> enla pantalla del monitor.
Al iniciar la aplicación WinDDSSetup hay que seleccionar el puerto virtualCOM para poder establecer comunicación con el equipo.
Para obtener información sobre el puerto COM generado, procédase delsiguiente modo:
Hacer click con el botón derecho del ratón sobre el icono <Mi PC>.
Seleccionar la opción <Propiedades> y después la etiqueta <Hardware>en la siguiente ventana emergente.
Seleccionar ahora <Administrador de dispositivos>.
En la ventana que se muestra aparecerán como:
Adaptadores serie de puertos múltiple, la referencia MOTION CON-TROL INNOVA
Puertos (COM & LPT), la referencia USB-Serial Port (COMx). Nóteseque el dígito que aparece en la posición x hace referencia al nuevo puertovirtual COM para el PC.
Realícese la instalación recomendada por el sistema seleccionando laopción <por defecto> e ignórese el mensaje que aparece en pantalla duranteel proceso de instalación referente a las pruebas de incompatibilidad delsoftware con el sistema operativo Windows® XP. Siga adelante pulsandoel botón <Continuar>. Este mensaje hace referencia a los drivers aún nocertificados. No obstante, éstos son totalmente funcionales.
Regulación AC Brushless digital - Ref.0910 MCPi-43/112
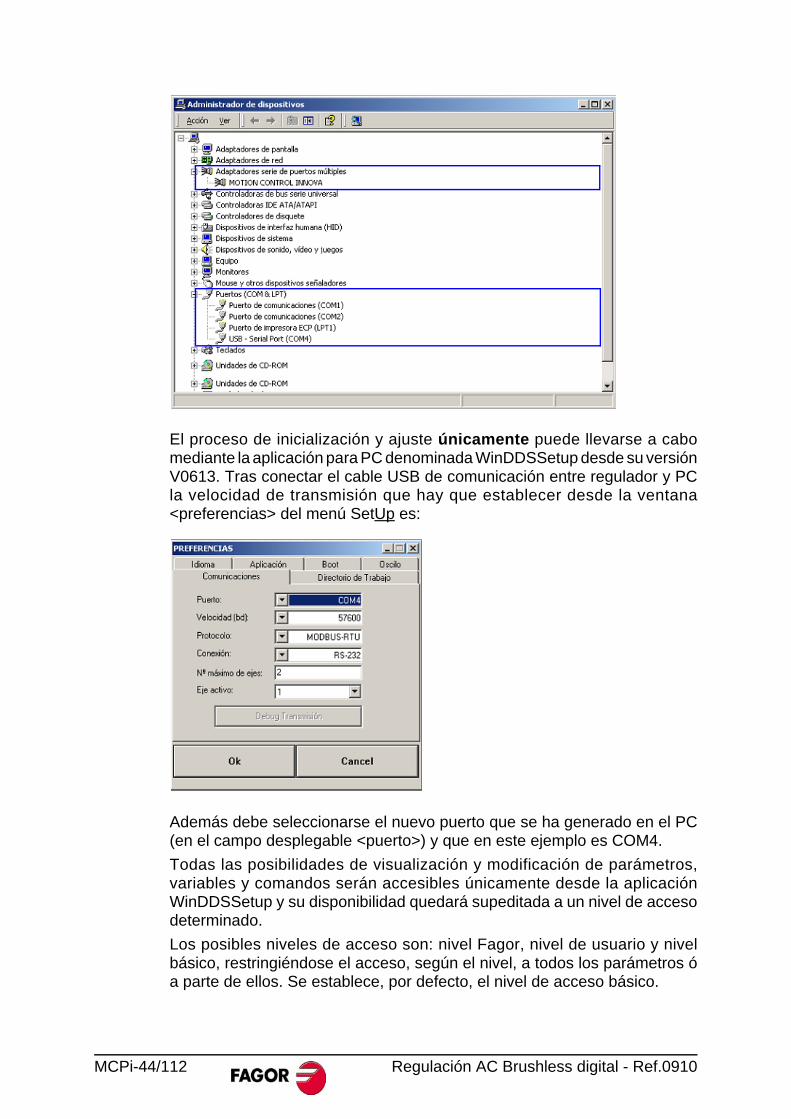
El proceso de inicialización y ajuste únicamente puede llevarse a cabomediante la aplicación para PC denominada WinDDSSetup desde su versiónV0613. Tras conectar el cable USB de comunicación entre regulador y PCla velocidad de transmisión que hay que establecer desde la ventana<preferencias> del menú SetUp es:
Además debe seleccionarse el nuevo puerto que se ha generado en el PC(en el campo desplegable <puerto>) y que en este ejemplo es COM4.
Todas las posibilidades de visualización y modificación de parámetros,variables y comandos serán accesibles únicamente desde la aplicaciónWinDDSSetup y su disponibilidad quedará supeditada a un nivel de accesodeterminado.
Los posibles niveles de acceso son: nivel Fagor, nivel de usuario y nivelbásico, restringiéndose el acceso, según el nivel, a todos los parámetros óa parte de ellos. Se establece, por defecto, el nivel de acceso básico.
MCPi-44/112 Regulación AC Brushless digital - Ref.0910
Para cambiar el nivel de acceso deberá introducirse el códigocorrespondiente en el campo que se despliega tras activar las etiquetasSetUp > Acces level desde la ventana principal del WinDDSSetup.
Seguidamente, si el sistema está formado por la conexión de un reguladorMCPi con un motor de la serie FS, su encóder informará al regulador del tipode motor que le ha sido conectado, ajustando sus parámetrosautomáticamente con los valores establecidos por defecto.
No obstante, cabe la posibilidad de que, finalmente, sea necesario realizarun ajuste de la ganancia del PI de velocidad en la aplicación mediante losparámetros SP1 (k proporcional) y SP2 (k integral) hasta conseguir el com-portamiento deseado por el sistema.
Cualquier modificación llevada a cabo para realizar el ajuste anterior habrásido almacenada en la memoria RAM del regulador pero no de forma per-manente, de tal manera que si por la razón que fuese se efectúa un reset enel equipo, no se tendrían en cuenta las modificaciones realizadas ya que elregulador vuelve a establecer la configuración dispuesta en su E2PROM enel nuevo arranque.
Por tanto, para almacenar de forma permanente cualquier modificación, esnecesario trasladar la información almacenada en la memoria RAM a lamemoria E2PROM ejecutando el comando GC1. Realícese un SoftReset(GV11) una vez haya finalizado la ejecución del comando anterior.
Para obtener información sobre el regulador coherente con el motor selec-cionado (información no manipulable) localícese la variable GV9. Si poralguna razón debe utilizarse un cambio de nivel de acceso, edite el nuevocódigo de acceso en el campo que se despliega tras seleccionar SetUp >Acces level.
Ejecútese ahora el comando GC1 y finalícese el proceso con un reset delequipo.
Nota: Para volver a restablecer los parámetros a la situación inicial <pordefecto> ejecútese el comando GC10 y posteriormente GC1 paramemorizar la parametrización de forma permanente.
Regulación AC Brushless digital - Ref.0910 MCPi-45/112
Interfaz software
El método de programación del sistema se realiza en modo tabla (estructuraen forma tabulada). En este modo de programación, tanto el programa dePLC como el de posicionamiento y el de Motion Control se integran en unaúnica línea de comando utilizando una sintaxis especial haciendo laprogramación más sencilla. Esta sintaxis ha sido diseñada de tal manera quetodas las aplicaciones previstas para ser llevadas a cabo por este equipoqueden cubiertas.
Tipos de posicionamiento
Los tipos de posicionamiento para los que se ha diseñado el regulador MCPInnova son para:
Ejes lineales con captación motor.
Ejes lineales con captación directa.
Ejes lineales con captación motor y captación directa.
Ejes rotativos con captación motor.
Ejes rotativos con captación directa.
Ejes rotativos con captación motor y captación directa.
Sintaxis del editor de tablas
La tabla consta de los siguientes campos:
Nº_BLOQUE
POS_MODE
POS_VAL
VELPOS
EVENT_TYPE
FAST INPUT
TIME
PROGOUT
LOOP
NEXT
INCR - CNT
CNDTNL_JMP
MCPi-46/112 Regulación AC Brushless digital - Ref.0910
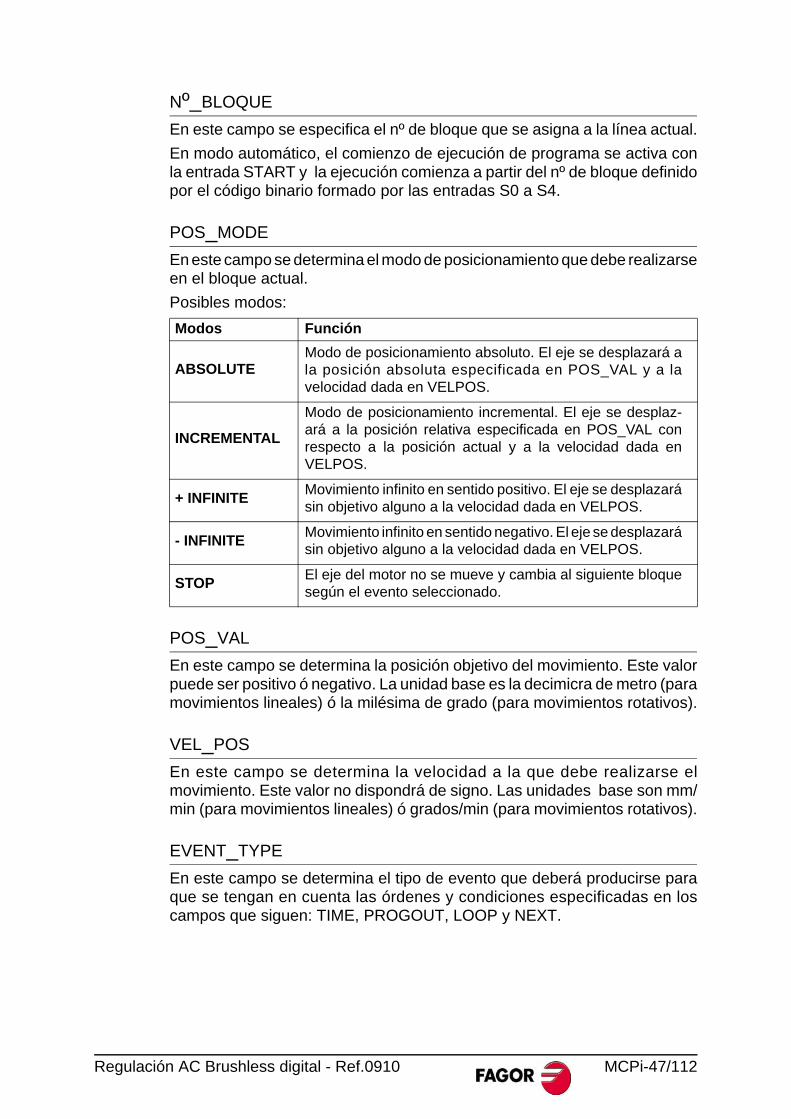
Nº_BLOQUE
En este campo se especifica el nº de bloque que se asigna a la línea actual.
En modo automático, el comienzo de ejecución de programa se activa conla entrada START y la ejecución comienza a partir del nº de bloque definidopor el código binario formado por las entradas S0 a S4.
POS_MODE
En este campo se determina el modo de posicionamiento que debe realizarseen el bloque actual.
Posibles modos:
POS_VAL
En este campo se determina la posición objetivo del movimiento. Este valorpuede ser positivo ó negativo. La unidad base es la decimicra de metro (paramovimientos lineales) ó la milésima de grado (para movimientos rotativos).
VEL_POS
En este campo se determina la velocidad a la que debe realizarse elmovimiento. Este valor no dispondrá de signo. Las unidades base son mm/min (para movimientos lineales) ó grados/min (para movimientos rotativos).
EVENT_TYPE
En este campo se determina el tipo de evento que deberá producirse paraque se tengan en cuenta las órdenes y condiciones especificadas en loscampos que siguen: TIME, PROGOUT, LOOP y NEXT.
Modos Función
ABSOLUTEModo de posicionamiento absoluto. El eje se desplazará ala posición absoluta especificada en POS_VAL y a lavelocidad dada en VELPOS.
INCREMENTAL
Modo de posicionamiento incremental. El eje se desplaz-ará a la posición relativa especificada en POS_VAL conrespecto a la posición actual y a la velocidad dada enVELPOS.
+ INFINITEMovimiento infinito en sentido positivo. El eje se desplazarásin objetivo alguno a la velocidad dada en VELPOS.
- INFINITEMovimiento infinito en sentido negativo. El eje se desplazarásin objetivo alguno a la velocidad dada en VELPOS.
STOPEl eje del motor no se mueve y cambia al siguiente bloquesegún el evento seleccionado.
Regulación AC Brushless digital - Ref.0910 MCPi-47/112
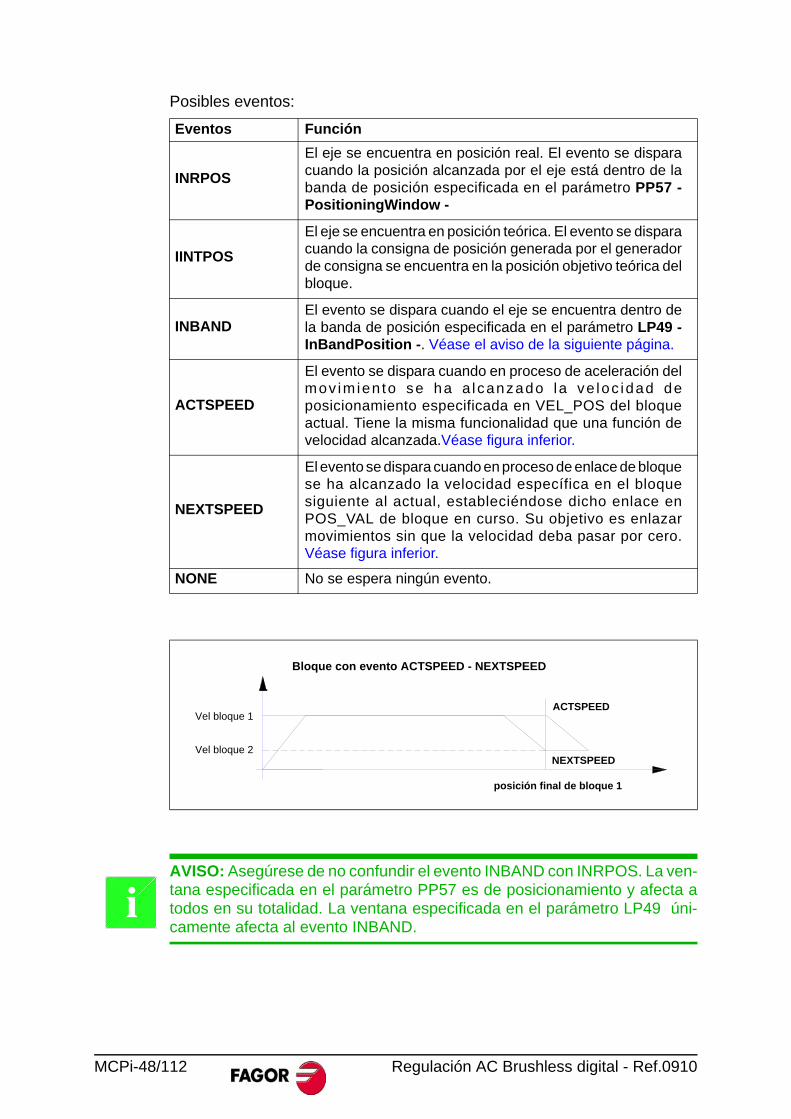
Posibles eventos:
Eventos Función
INRPOS
El eje se encuentra en posición real. El evento se disparacuando la posición alcanzada por el eje está dentro de labanda de posición especificada en el parámetro PP57 -PositioningWindow -
IINTPOS
El eje se encuentra en posición teórica. El evento se disparacuando la consigna de posición generada por el generadorde consigna se encuentra en la posición objetivo teórica delbloque.
INBANDEl evento se dispara cuando el eje se encuentra dentro dela banda de posición especificada en el parámetro LP49 -InBandPosition -. Véase el aviso de la siguiente página.
ACTSPEED
El evento se dispara cuando en proceso de aceleración delmov im ien to se ha a l canzado la ve loc idad deposicionamiento especificada en VEL_POS del bloqueactual. Tiene la misma funcionalidad que una función develocidad alcanzada.Véase figura inferior.
NEXTSPEED
El evento se dispara cuando en proceso de enlace de bloquese ha alcanzado la velocidad específica en el bloquesiguiente al actual, estableciéndose dicho enlace enPOS_VAL de bloque en curso. Su objetivo es enlazarmovimientos sin que la velocidad deba pasar por cero.Véase figura inferior.
NONE No se espera ningún evento.
Bloque con evento ACTSPEED - NEXTSPEED
posición final de bloque 1
Vel bloque 1
Vel bloque 2
ACTSPEED
NEXTSPEED
AVISO: Asegúrese de no confundir el evento INBAND con INRPOS. La ven-tana especificada en el parámetro PP57 es de posicionamiento y afecta atodos en su totalidad. La ventana especificada en el parámetro LP49 úni-camente afecta al evento INBAND.
i
MCPi-48/112 Regulación AC Brushless digital - Ref.0910
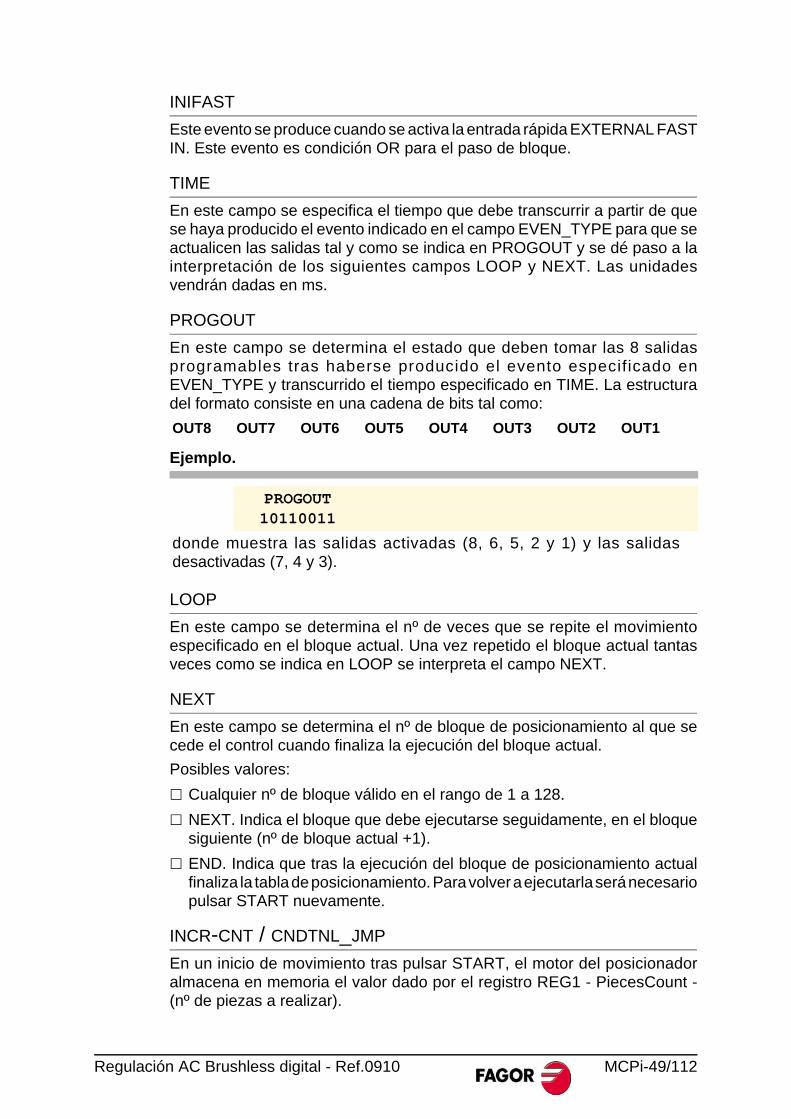
INIFAST
Este evento se produce cuando se activa la entrada rápida EXTERNAL FASTIN. Este evento es condición OR para el paso de bloque.
TIME
En este campo se especifica el tiempo que debe transcurrir a partir de quese haya producido el evento indicado en el campo EVEN_TYPE para que seactualicen las salidas tal y como se indica en PROGOUT y se dé paso a lainterpretación de los siguientes campos LOOP y NEXT. Las unidadesvendrán dadas en ms.
PROGOUT
En este campo se determina el estado que deben tomar las 8 salidasprogramables tras haberse producido el evento especificado enEVEN_TYPE y transcurrido el tiempo especificado en TIME. La estructuradel formato consiste en una cadena de bits tal como:
LOOP
En este campo se determina el nº de veces que se repite el movimientoespecificado en el bloque actual. Una vez repetido el bloque actual tantasveces como se indica en LOOP se interpreta el campo NEXT.
NEXT
En este campo se determina el nº de bloque de posicionamiento al que secede el control cuando finaliza la ejecución del bloque actual.
Posibles valores:
Cualquier nº de bloque válido en el rango de 1 a 128.
NEXT. Indica el bloque que debe ejecutarse seguidamente, en el bloquesiguiente (nº de bloque actual +1).
END. Indica que tras la ejecución del bloque de posicionamiento actualfinaliza la tabla de posicionamiento. Para volver a ejecutarla será necesariopulsar START nuevamente.
INCR-CNT / CNDTNL_JMP
En un inicio de movimiento tras pulsar START, el motor del posicionadoralmacena en memoria el valor dado por el registro REG1 - PiecesCount -(nº de piezas a realizar).
OUT8 OUT7 OUT6 OUT5 OUT4 OUT3 OUT2 OUT1
Ejemplo.
PROGOUT10110011
donde muestra las salidas activadas (8, 6, 5, 2 y 1) y las salidasdesactivadas (7, 4 y 3).
Regulación AC Brushless digital - Ref.0910 MCPi-49/112
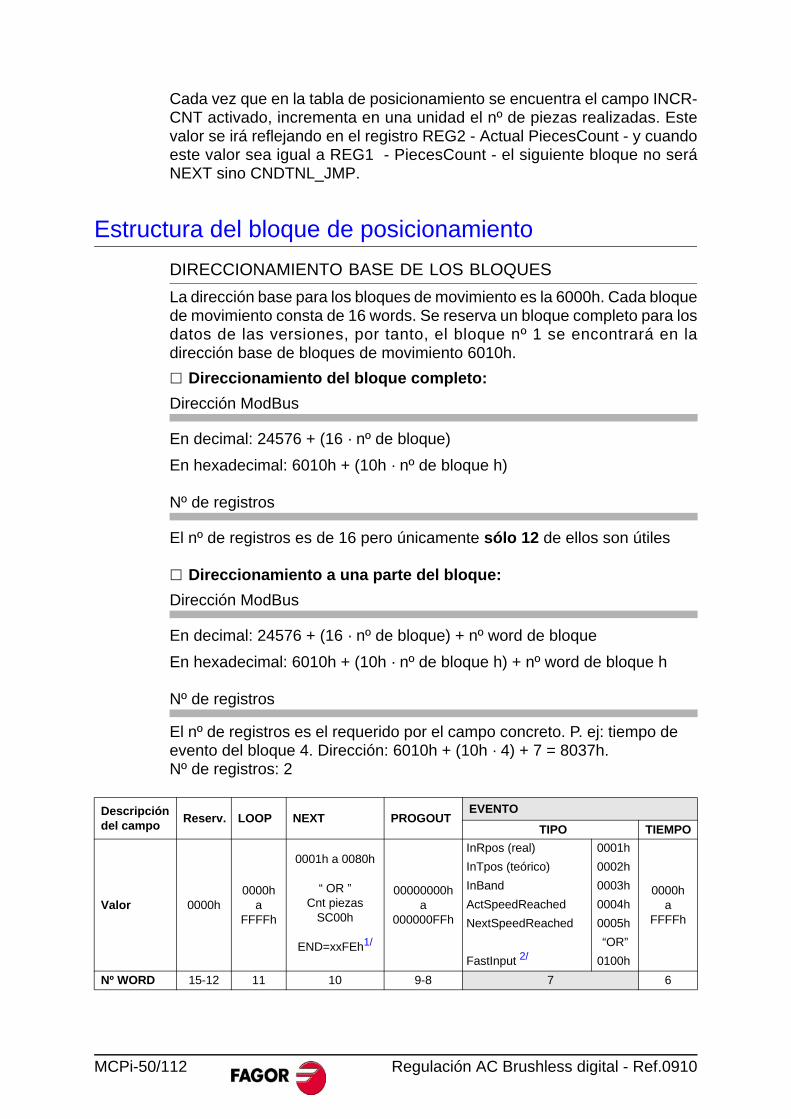
Cada vez que en la tabla de posicionamiento se encuentra el campo INCR-CNT activado, incrementa en una unidad el nº de piezas realizadas. Estevalor se irá reflejando en el registro REG2 - Actual PiecesCount - y cuandoeste valor sea igual a REG1 - PiecesCount - el siguiente bloque no seráNEXT sino CNDTNL_JMP.
Estructura del bloque de posicionamiento
DIRECCIONAMIENTO BASE DE LOS BLOQUES
La dirección base para los bloques de movimiento es la 6000h. Cada bloquede movimiento consta de 16 words. Se reserva un bloque completo para losdatos de las versiones, por tanto, el bloque nº 1 se encontrará en ladirección base de bloques de movimiento 6010h.
Direccionamiento del bloque completo:
Dirección ModBus
Nº de registros
Direccionamiento a una parte del bloque:
Dirección ModBus
Nº de registros
En decimal: 24576 + (16 · nº de bloque)
En hexadecimal: 6010h + (10h · nº de bloque h)
El nº de registros es de 16 pero únicamente sólo 12 de ellos son útiles
En decimal: 24576 + (16 · nº de bloque) + nº word de bloque
En hexadecimal: 6010h + (10h · nº de bloque h) + nº word de bloque h
El nº de registros es el requerido por el campo concreto. P. ej: tiempo deevento del bloque 4. Dirección: 6010h + (10h · 4) + 7 = 8037h. Nº de registros: 2
Descripción del campo
Reserv. LOOP NEXT PROGOUTEVENTO
TIPO TIEMPO
Valor 0000h0000h
aFFFFh
0001h a 0080h
“ OR ”Cnt piezas
SC00h
END=xxFEh1/
00000000h a
000000FFh
InRpos (real) 0001h
0000h a
FFFFh
InTpos (teórico) 0002h
InBand 0003h
ActSpeedReached 0004h
NextSpeedReached 0005h
“OR”
FastInput 2/ 0100h
Nº WORD 15-12 11 10 9-8 7 6
MCPi-50/112 Regulación AC Brushless digital - Ref.0910
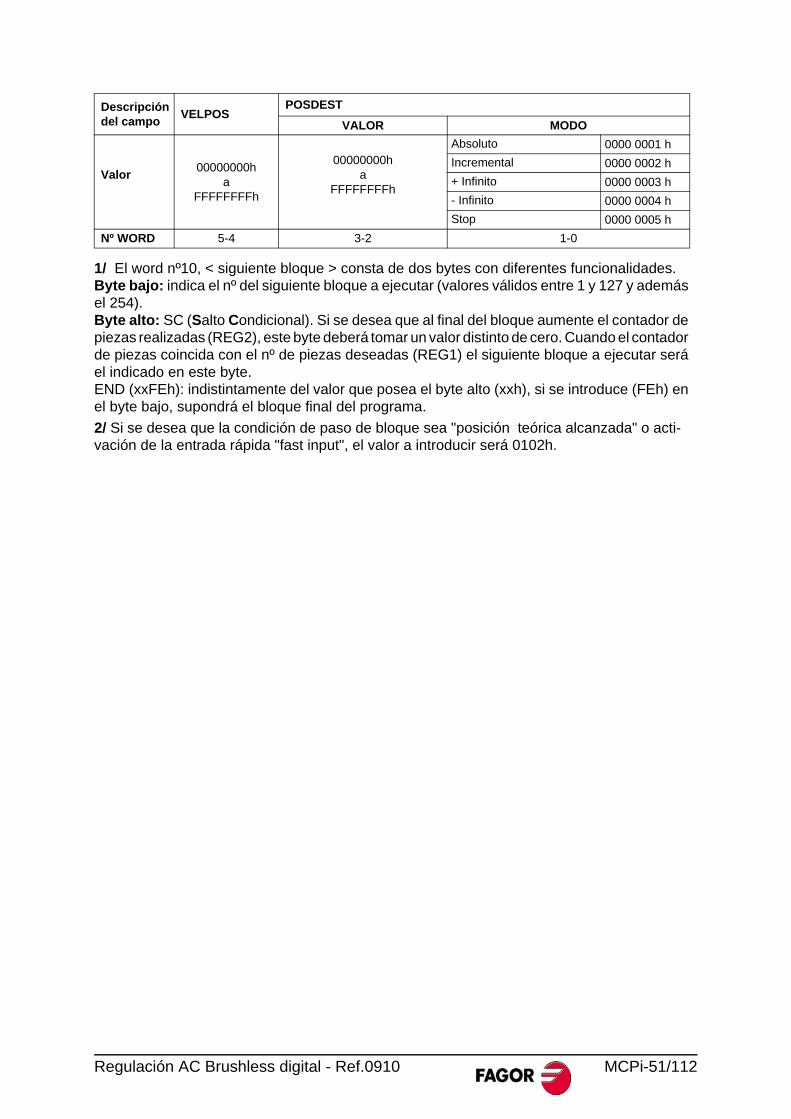
Descripción del campo
VELPOSPOSDEST
VALOR MODO
Valor00000000h
aFFFFFFFFh
00000000ha
FFFFFFFFh
Absoluto 0000 0001 h
Incremental 0000 0002 h
+ Infinito 0000 0003 h
- Infinito 0000 0004 h
Stop 0000 0005 h
Nº WORD 5-4 3-2 1-0
1/ El word nº10, < siguiente bloque > consta de dos bytes con diferentes funcionalidades.Byte bajo: indica el nº del siguiente bloque a ejecutar (valores válidos entre 1 y 127 y ademásel 254).Byte alto: SC (Salto Condicional). Si se desea que al final del bloque aumente el contador depiezas realizadas (REG2), este byte deberá tomar un valor distinto de cero. Cuando el contadorde piezas coincida con el nº de piezas deseadas (REG1) el siguiente bloque a ejecutar seráel indicado en este byte.END (xxFEh): indistintamente del valor que posea el byte alto (xxh), si se introduce (FEh) enel byte bajo, supondrá el bloque final del programa.
2/ Si se desea que la condición de paso de bloque sea "posición teórica alcanzada" o acti-vación de la entrada rápida "fast input", el valor a introducir será 0102h.
Regulación AC Brushless digital - Ref.0910 MCPi-51/112
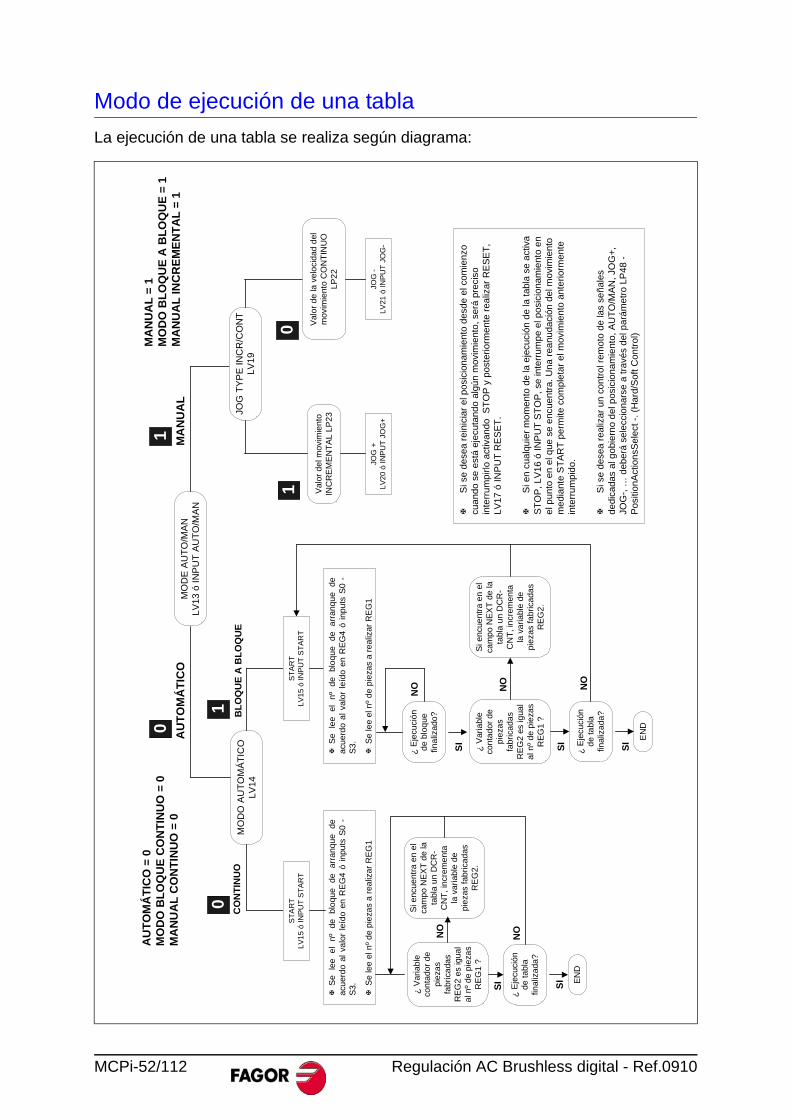
Modo de ejecución de una tabla
La ejecución de una tabla se realiza según diagrama:
MO
DE
AU
TO
/MA
NL
V1
3 ó
INP
UT
AU
TO
/MA
N
AU
TO
MÁ
TIC
O
CO
NT
INU
O
MA
NU
AL
MO
DO
AU
TO
MÁ
TIC
OLV
14
BL
OQ
UE
A B
LO
QU
E
ST
AR
TLV
15 ó
IN
PU
T S
TA
RT
ST
AR
TLV
15 ó
INP
UT
ST
AR
T
S
e le
e e
l nº
de
bl
oqu
e d
e
arr
anq
ue
de
acu
erd
o al
va
lor
leíd
o en
RE
G4
ó i
npu
ts S
0 -
S3.
S
e le
e el
nº
de
pie
zas
a r
ealiz
ar
RE
G1
S
e
lee
el
nº
de
blo
qu
e d
e
arr
anq
ue
de
a
cue
rdo
al
valo
r le
ído
en
RE
G4
ó i
npu
ts S
0 -
S3
.
S
e le
e el
nº
de p
ieza
s a
re
aliz
ar
RE
G1
¿ V
aria
ble
con
tado
r d
e p
ieza
s fa
bric
ada
s R
EG
2 es
igua
l a
l nº
de
pie
zas
RE
G1
?
Si e
ncu
ent
ra e
n e
l ca
mpo
NE
XT
de
la
tab
la u
n D
CR
-C
NT
, in
crem
ent
a la
va
riab
le d
e pi
eza
s fa
bric
ad
as
RE
G2.
¿ E
jecu
ció
n d
e ta
bla
fin
aliz
ada
?
EN
D
SI
NO
SI
NO
¿ V
aria
ble
con
tad
or d
e p
ieza
s fa
bric
ad
as
RE
G2
es ig
ual
al n
º d
e pi
eza
s R
EG
1 ?
Si e
ncu
en
tra
en e
l ca
mp
o N
EX
T d
e la
ta
bla
un
DC
R-
CN
T,
incr
em
enta
la
var
iabl
e de
pi
eza
s fa
bric
ada
s R
EG
2.
¿ E
jecu
ció
n
de
tab
la
fina
lizad
a?
EN
D
SI
NO
SI
NO
¿ E
jecu
ció
n d
e b
loq
ue
fina
lizad
o?
NO
SI
JOG
TY
PE
INC
R/C
ON
TL
V19
Val
or
del
mo
vim
ien
to
INC
RE
ME
NT
AL
LP
23
JOG
+LV
20 ó
IN
PU
T J
OG
+
Val
or
de
la v
elo
cid
ad d
el
mo
vim
ient
o C
ON
TIN
UO
L
P2
2
JOG
-LV
21 ó
IN
PU
T J
OG
-
S
i se
dese
a re
inic
iar
el p
osic
iona
mie
nto
desd
e el
com
ienz
o cu
and
o se
est
á ej
ecut
ando
alg
ún
mov
imie
nto
, ser
á pr
ecis
o in
terr
um
pirlo
act
ivan
do S
TO
P y
pos
terio
rmen
te r
ealiz
ar R
ES
ET
, LV
17 ó
INP
UT
RE
SE
T.
S
i en
cual
quie
r m
om
ento
de
la e
jecu
ció
n de
la ta
bla
se a
ctiv
a S
TO
P, L
V16
ó IN
PU
T S
TO
P,
se in
terr
ump
e el
pos
icio
nam
ient
o en
el
pun
to e
n el
que
se
encu
entr
a. U
na r
eanu
daci
ón d
el m
ovim
ient
o m
edia
nte
ST
AR
T p
erm
ite c
ompl
etar
el m
ovim
ient
o an
terio
rmen
te
inte
rru
mpi
do.
S
i se
dese
a re
aliz
ar u
n c
ont
rol r
emot
o de
las
seña
les
dedi
cada
s al
gob
iern
o d
el p
osic
ion
amie
nto,
AU
TO
/MA
N, J
OG
+,
JOG
-, …
deb
erá
sele
ccio
nars
e a
trav
és d
el p
arám
etr
o LP
48 -
P
ositi
onA
ctio
nsS
elec
t -. (
Har
d/S
oft C
ontr
ol)
AU
TO
MÁ
TIC
O =
0M
OD
O B
LO
QU
E C
ON
TIN
UO
= 0
MA
NU
AL
CO
NT
INU
O =
0
MA
NU
AL
= 1
MO
DO
BL
OQ
UE
A B
LO
QU
E =
1M
AN
UA
L IN
CR
EM
EN
TA
L =
10
1
01
10
MCPi-52/112 Regulación AC Brushless digital - Ref.0910
DESCRIPCIÓN DEL PROCESO
Es posible gobernar el regulador posicionador MCPi de forma remota a travésde ModBus mediante la línea serie del regulador. Configúrese el parámetroLP48 - PositionActionsSelect -.
La selección “ hardware/software ” se realiza de modo total ó individual. Véaseel parámetro LP48 - PositionActionsSelect -.
Hardware(0), el estado de las “entradas hardware” dedicadas al kernelqueda reflejado en su variable correspondiente.
Software(1), el estado de las “entradas hardware” no tendrá efecto algunosobre su variable y el control de la funcionalidad de tal variable sera totalmentevía software.
Los comandos kernel afectados por el parámetro LP48 son:
REG4. PositionBlockIni.
LV15. KernelStartSignal.
LV16. KernelStopSignal.
LV17. KernelResetSignal.
LV13. KernelOperationMode.
LV20. JogPositiveSignal.
LV21. JogNegativeSignal.
PC148. DriveControlledHoming.
PC150. ChangePosFB12.
El proceso varía dependiendo del modo de operación seleccionado en lavariable LV13 - KernelOperationMode - (automático ó manual).
Los límites “hardware” de recorrido están siempre activos y los límites“software” de recorrido definidos en los parámetros: PP49 - PositivePositionLimit - y PP50 - NegativePositionLimit - lo estaránsi se activan mediante el parámetro:PP55 - PositionPolarity Parameters -.
MODO DE OPERACIÓN MANUAL
Este modo se selecciona con (LV13=1. KernelOperationMode).
En modo manual puede realizarse el movimiento según submodo:
En submodo continuo se establece un movimiento continuo con unavelocidad prefijada por el parámetro LP22 - JogVelocity - mientras semantiene pulsado JOG + ó JOG.
En submodo incremental se establece un movimiento incremental con unincremento de posición para cada pulsación de JOG + ó JOG- dado por elparámetro LP23 - JogIncrementalPosition -.
Las variables asociadas a las entradas JOG+ y JOG- en movimiento manualson LV20 - JogPositiveSignal - y LV21 - JogNegativeSignal - respectiva-mente.
Continuo LV19=0 - KernelManMode -Incremental LV19=1 - KernelManMode -
Regulación AC Brushless digital - Ref.0910 MCPi-53/112
MODO DE OPERACIÓN AUTOMÁTICO
Este modo se selecciona con (LV13=0. KernelOperationMode).
En modo automático puede determinarse la manera de recorrer la tabla deposicionamiento editada:
Modo bloque a bloque (LV14=1. KernelAutoMode)
Trás realizar una pulsación sobre la entrada START, el bloque inicial se reflejaen el registro de PLC, REG4 - PositionBlockIni - .
Este valor estará definido por las entradas “ hardware ”, S0 a S4, siempre queel parámetro LP48 - PositionActions Select - esté a 0.
Simultáneamente carga el valor de REG1 - PiecesCount - (contador del nºde piezas a fabricar).
Seguidamente comienza la ejecución del bloque indicado, finalizándose elposicionamiento cuando acaba de ejecutarse el bloque.
Si se desea que el posicionamiento continúe en el nº de bloque dado por elcampo NEXT de la tabla de posicionamiento debe nuevamente activarse laentrada START y así, bloque a bloque hasta que finalice la tabla (cuando enel campo NEXT se lea un END ó cuando el contador de piezas fabricadasdado por REG2 sea igual al nº de piezas a fabricar dado por REG1).
Modo continuo (LV14=0. KernelAutoMode)
Proceso idéntico al anterior, salvo que para que se establezca el paso debloque a bloque no será necesario activar la entrada START, siendocontinuo hasta la finalización del programa editado.
Si mientras se está ejecutando una determinada tabla de posicionamiento seactiva la señal LV16 - KernelStopSignal - se interrumpe el posicionamiento.Activando la entrada START se reanuda el movimiento justamente desde elpunto de parada.
Si en cualquier punto, durante el proceso de ejecución del programa, se deseareiniciar el movimiento desde el principio de la tabla, se detendrá la ejecuciónpulsando STOP y a continuación la entrada RESET, LV17 - KernelResetSignal - ó Input RESET.
Variables del estado de posicionamiento
Todas las variables del posicionador están disponibles para ser visualizadaso utilizadas por otras aplicaciones a través de ModBus. Este grupo devariables dan una visión de la situación del posicionamiento en curso.
Las variables disponibles son:
REG3 RunningBlockRefleja el nº de bloque que se está ejecutando actualmente.
LV35 BlockTravelDistanceRefleja la posición objetivo del bloque actual.
LV158 TargetPositionPosición objetivo final en el eje absoluto del posicionador.
MCPi-54/112 Regulación AC Brushless digital - Ref.0910
Configuración del posicionador
Existe un grupo de parámetros que determinan la configuración delposicionador que se desea implementar.
Se recomienda introducir los valores de estos parámetros según el orden conel que se describen a continuación. Se agrupan así:
GRUPO GENERAL
Set de parámetros que configuran el posicionador de modo general. Son:
Modo de operación del regulador. Su valor define una de las siguientes con-figuraciones como regulador de:
VELOCIDAD (0-1-2): Equivalente al funcionamiento del regulador MCSi.
POSICIÓN CON CAPTACIÓN MOTOR (3): El elemento de medida de laposición de la aplicación es la captación integrada en el propio motor (encó-der TTL incremental de 2500 ppv ó encóder SinCosTM ó SinCoderTM).
POSICIÓN CON CAPTACIÓN DIRECTA (4): El elemento de medida dela posición de la aplicación es un elemento de captación externo (encóderTTL incremental de 2500 ppv ó encóder SinCosTM ó SinCoderTM).
POSICIÓN CON CAPTACIÓN MOTOR ó DIRECTA (5): El elemento demedida de la posición de la aplicación se establece desde cualquiera delas dos captaciones. El cambio de captación puede realizarse en modoONLINE por software ó hardware. Los movimientos en este modo seránexclusivamente incrementales. Los cambios de captación deberán reali-zarse siempre con el motor parado. Si la orden de cambio se da cuandoel motor aún no se ha detenido, no será efectiva hasta que finalice el movi-miento.
Cambio de captación (por software)
Comando PC150 (ChangePosFB12), con IP14 (DigitalInput FunctionSe-lector) distinto de cero y LP48 (PositionActions Select) como control decambio de captación por software individual (bit 8) ó total.
LV36 BlockCoveredDistanceIntervalo de distancia recorrido hasta ese momento en el bloque actual.
PV51 PositionFeedback1Posición absoluta recorrida hasta el momento (captación motor).
PV53 PositionFeedback2Posición absoluta recorrida hasta el momento (captación directa).
LV159 PositioningVelocityVelocidad a la que se está produciendo el posicionamiento en el bloque actual.
PV189 FollowingErrorError de seguimiento del lazo de posición.
REG2 ActualPiecesCount Nº de piezas fabricadas hasta elmomento.
AP1 PrimaryOperationMode
Regulación AC Brushless digital - Ref.0910 MCPi-55/112

Cambio de captación (por hardware)
Seleccionable desde la entrada digital de X1 con IP14 (DigitalInput Func-tionSelector) igual a cero y LP48 (PositionActionsSelect) como control decambio de captación por hardware individual (bit 8) ó total.
Determina si la configuración del sistema mecánico es para eje lineal ó rota-tivo. Para el caso rotativo también especifica si la configuración es en formatomódulo ó absoluto.
Ventana de posicionamiento. Determina la banda de posición consideradaválida para admitir que se está en la posición.
Ventana de error de seguimiento. Determina la banda máxima de error deseguimiento permitido para que no se dé error de seguimiento.
Ventana que determina el rango de posición para el que se considera quepuede dispararse el evento INBAND en la tabla de posicionamiento.
Los bits de este parámetro determinan aspectos de la puesta en marcha delsistema, y son:
Límites activados/desactivados “vía software“ (PP49 y PP50).
Interpretación de la consigna de posición invertida. Tiene efecto en el lazo.
Valor del límite absoluto máximo de posición “software” positivo.
Valor del límite absoluto máximo de posición “software” negativo.
GRUPO DE CONFIGURACIÓN DEL EJE
Parámetro común tanto para eje lineal como rotativo. Véase - GRUPOGENERAL - expuesto anteriormente para más detalles.
Valor del módulo de un eje rotativo.
PP76 PositionDataScalingType
PP57 PositionWindow
PP159 MonitoringWindow
LP49 InBandPosition
PP55 PositionPolarityParameters
PP49 PositivePositionLimit
PP50 NegativePositionLimit
PP76 PositionDataScalingType
PP103 ModuleValue
MCPi-56/112 Regulación AC Brushless digital - Ref.0910
Modo de búsqueda de cota para ejes rotativos. Puede indicar que la busquedade posición se realiza en:
sentido de giro horario.
sentido de giro antihorario.
sentido de giro más corto.
CAPTACIÓN MOTOR
Estos parámetros determinan la relación mecánica existente entre el eje delmotor y el eje final del movimiento.
Avance lineal por cada vuelta de husillo, es decir, paso del husillo.
CAPTACIÓN DIRECTA
Set de parámetros que permiten configurar diversos aspectos relacionadoscon la captación directa. Son:
Estos parámetros determinan la reducción mecánica existente entre el puntode medida y la entrada al regulador.
Paso de la regla. Para regla de tipo lineal el valor del paso será especificadoen dµm (decimicras).
Resolución de la captación directa en el caso de encóder de tipo rotativo. Suvalor será especificado en pulsos por vuelta.
Resolución de la captación directa en el caso de regla. Su valor será espe-cificado en dµm (decimicras).
Configuración de la instalación. Este parámetro permite seleccionar una reglalineal ó un encóder rotativo como captación directa . Además uno de sus bitsindica al regulador si la captación de posición generada por la captacióndirecta debe invertirse o no en el lazo de posición.
LP143 ModuleCommandMode
NP121 InputRevolutions
NP122 OutputRevolutions
NP123 FeedConstant
NP131 InputRevolutions2
NP132 OutputRevolutions2
NP133 FeedConstant2
NP117 ResolutionOfFeedback2
NP118 ResolutionOfLinearFeedback
PP115 PositionFeedback2Type
Regulación AC Brushless digital - Ref.0910 MCPi-57/112
GRUPO DE AJUSTE DEL LAZO DE POSICIÓN
Ganancia proporcional del lazo de posición.
Ganancia proporcional del lazo de posición con captación directa.
Ajuste del feedforward del lazo de posición.
Feedforward del lazo de posición con captación directa.
Aceleración del posicionamiento. Determina cuál será la aceleración con lasque se realizan los posicionamientos.
Aceleración del posicionamiento con captación directa.
GRUPO DE BÚSQUEDA DE CERO
Set de parámetros que permiten configurar la búsqueda de cero. Son:
Velocidad lenta de la búsqueda de cero. Determina la velocidad a la que serealiza la búsqueda de cero en su etapa de acercamiento final (después dehaber pulsado el home-switch).
Velocidad rápida de la búsqueda de cero. Determina la velocidad de labúsqueda de cero en su etapa de acercamiento (hasta que pulsa el home-switch).
Valor de la aceleración durante el proceso de la búsqueda de cero.
Distancia de referencia. Valor de la posición suministrado al lazo de posicióncuando ha sido detectado el I0.
Distancia de referencia con captación directa. Valor asignado al contador deposición cuando ha sido detectado el I0 en una búsqueda de cero concaptación directa.
PP104 PositionKvGain
PP105 PositionKvGain2
PP216 VelocityFeedForwardPercentage
PP218 VelocityFeedForwardPercentage2
LV160 PositioningAcceleration
LV161 PositioningAcceleration2
PP1 HomingVelocitySlow
PP41 HomingVelocityFast
PP42 HomingAcceleration
PP52 ReferenceDistance1
PP54 ReferenceDistance2
MCPi-58/112 Regulación AC Brushless digital - Ref.0910
Configuración de la búsqueda de I0. Determina ciertos aspectos en lamaniobra de búsqueda de I0 como si:
se considera ó no el Home-Switch.
se realiza con la captación motor ó con la captación directa.
se considera ó no invertida la señal de Home-Switch.
el sentido de la búsqueda es siempre horario ó antihorario.
se considera ó no el I0 del captador del motor.
COMANDOS
Comando de inicio de búsqueda de cero. Al ejecutar este comando se iniciala búsqueda de cero. IMPORTANTE: con el control soft del Kernel (parámetroLP48 activado), la entrada dedicada a este comando no tiene ningún efecto.
Comando de cambio de captación. Si se parametriza con valor 3, la regulaciónse lleva a cabo con la captación directa y con valor 0 con captación motor.
El control de las entradas digitales seleccionado es totalmente por hard-ware (véase parámetro LP48) pero IP14 es distinto de cero (función 0).
El control de las entradas digitales seleccionado es totalmente porsoftware (véase el parámetro LP48).
El control de las entradas digitales seleccionado es individual (véase elparámetro LP48) pero el bit 8 se pone a 1 (control de software)
PP147 HomingParameter
PC148 DriveControlledHoming
PC150 ChangePosFB12
Regulación AC Brushless digital - Ref.0910 MCPi-59/112
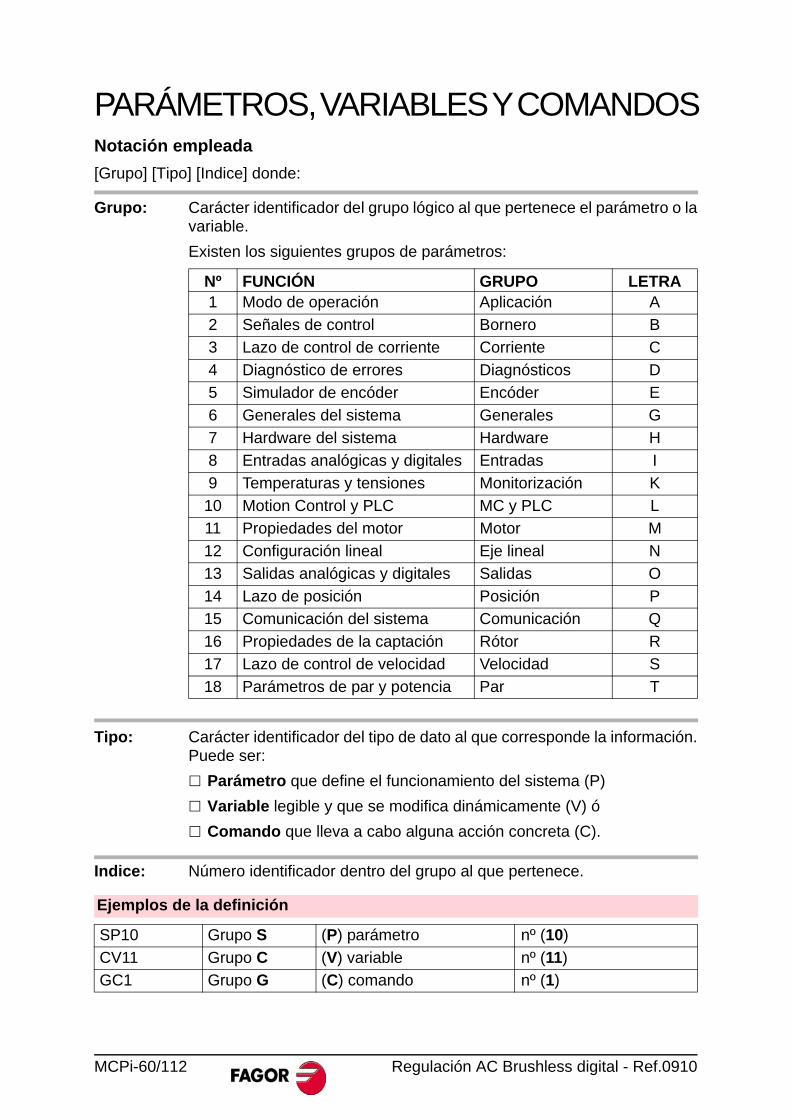
PARÁMETROS, VARIABLES Y COMANDOSNotación empleada
[Grupo] [Tipo] [Indice] donde:
Grupo: Carácter identificador del grupo lógico al que pertenece el parámetro o lavariable.
Existen los siguientes grupos de parámetros:
Tipo: Carácter identificador del tipo de dato al que corresponde la información.Puede ser:
Parámetro que define el funcionamiento del sistema (P)
Variable legible y que se modifica dinámicamente (V) ó
Comando que lleva a cabo alguna acción concreta (C).
Indice: Número identificador dentro del grupo al que pertenece.
Nº FUNCIÓN GRUPO LETRA1 Modo de operación Aplicación A
2 Señales de control Bornero B
3 Lazo de control de corriente Corriente C
4 Diagnóstico de errores Diagnósticos D
5 Simulador de encóder Encóder E
6 Generales del sistema Generales G
7 Hardware del sistema Hardware H
8 Entradas analógicas y digitales Entradas I
9 Temperaturas y tensiones Monitorización K
10 Motion Control y PLC MC y PLC L
11 Propiedades del motor Motor M
12 Configuración lineal Eje lineal N
13 Salidas analógicas y digitales Salidas O
14 Lazo de posición Posición P
15 Comunicación del sistema Comunicación Q
16 Propiedades de la captación Rótor R
17 Lazo de control de velocidad Velocidad S
18 Parámetros de par y potencia Par T
Ejemplos de la definición
SP10 Grupo S (P) parámetro nº (10)
CV11 Grupo C (V) variable nº (11)
GC1 Grupo G (C) comando nº (1)
MCPi-60/112 Regulación AC Brushless digital - Ref.0910
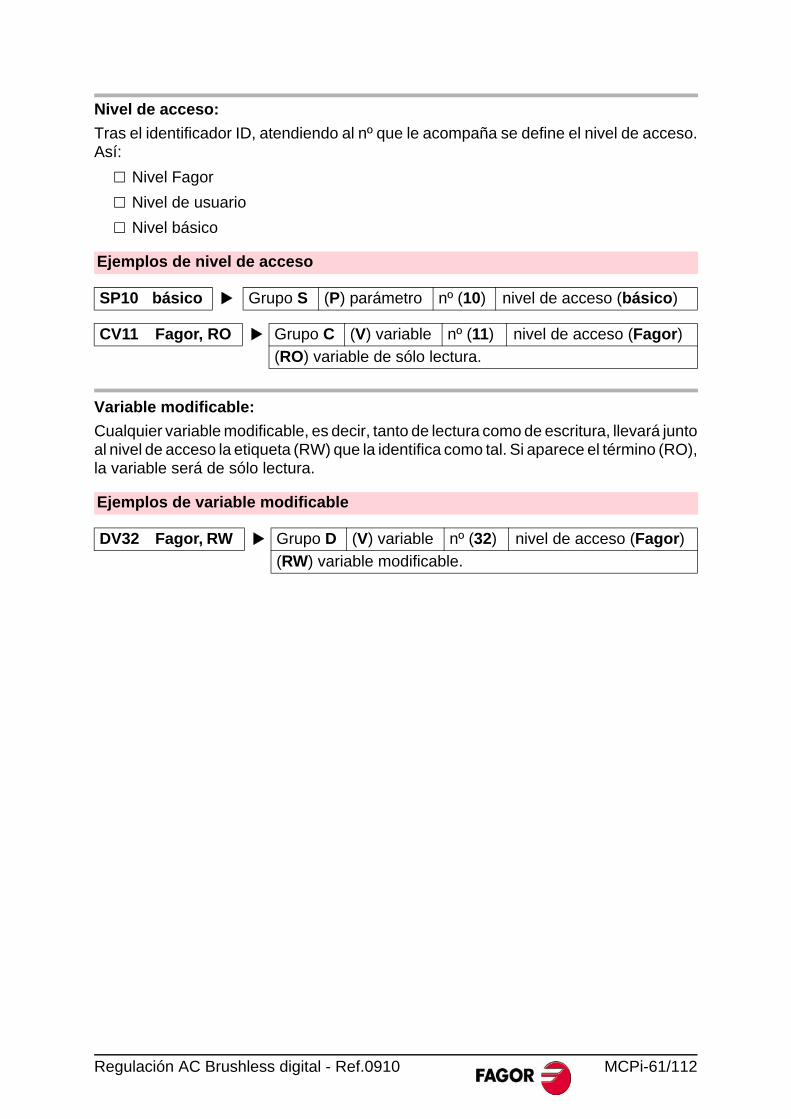
Nivel de acceso:
Tras el identificador ID, atendiendo al nº que le acompaña se define el nivel de acceso.Así:
Nivel Fagor
Nivel de usuario
Nivel básico
Variable modificable:
Cualquier variable modificable, es decir, tanto de lectura como de escritura, llevará juntoal nivel de acceso la etiqueta (RW) que la identifica como tal. Si aparece el término (RO),la variable será de sólo lectura.
Ejemplos de nivel de acceso
SP10 básico Grupo S (P) parámetro nº (10) nivel de acceso (básico)
CV11 Fagor, RO Grupo C (V) variable nº (11) nivel de acceso (Fagor)
(RO) variable de sólo lectura.
Ejemplos de variable modificable
DV32 Fagor, RW Grupo D (V) variable nº (32) nivel de acceso (Fagor)
(RW) variable modificable.
Regulación AC Brushless digital - Ref.0910 MCPi-61/112
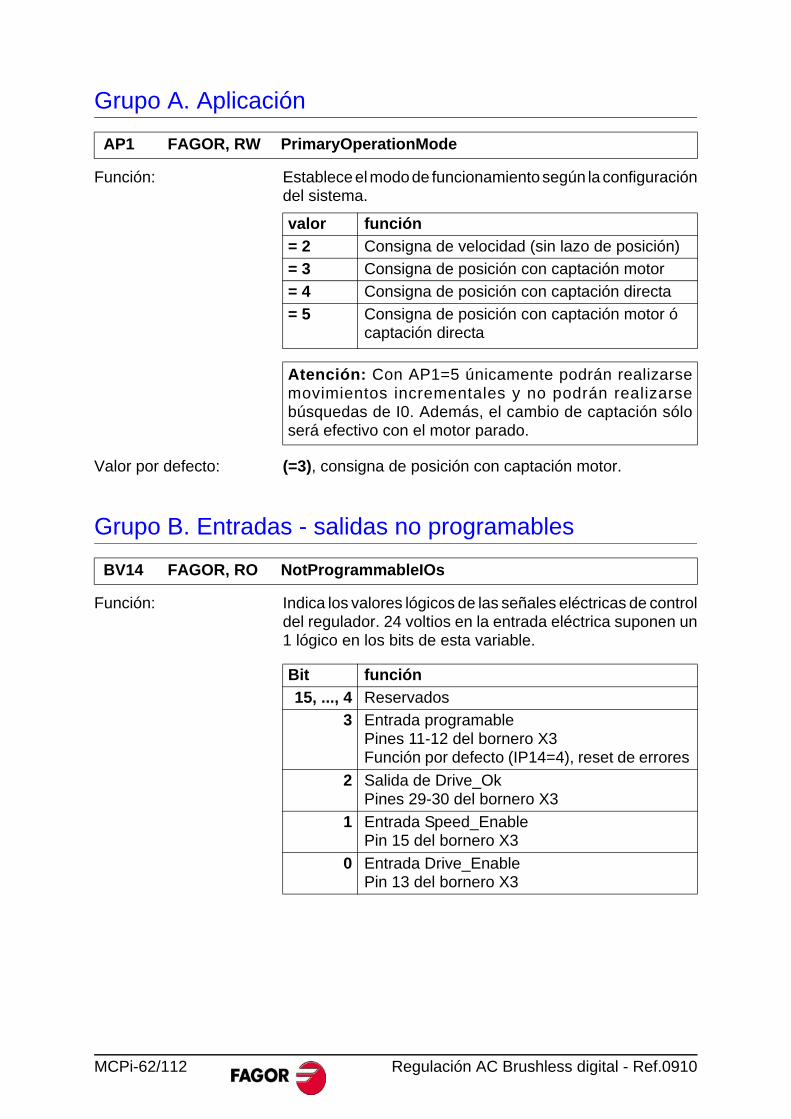
Grupo A. Aplicación
Función: Establece el modo de funcionamiento según la configuracióndel sistema.
Valor por defecto: (=3), consigna de posición con captación motor.
Grupo B. Entradas - salidas no programables
Función: Indica los valores lógicos de las señales eléctricas de controldel regulador. 24 voltios en la entrada eléctrica suponen un1 lógico en los bits de esta variable.
AP1 FAGOR, RW PrimaryOperationMode
valor función
= 2 Consigna de velocidad (sin lazo de posición)
= 3 Consigna de posición con captación motor
= 4 Consigna de posición con captación directa
= 5 Consigna de posición con captación motor ó captación directa
Atención: Con AP1=5 únicamente podrán realizarsemovimientos incrementales y no podrán realizarsebúsquedas de I0. Además, el cambio de captación sóloserá efectivo con el motor parado.
BV14 FAGOR, RO NotProgrammableIOs
Bit función
15, ..., 4 Reservados
3 Entrada programablePines 11-12 del bornero X3Función por defecto (IP14=4), reset de errores
2 Salida de Drive_OkPines 29-30 del bornero X3
1 Entrada Speed_EnablePin 15 del bornero X3
0 Entrada Drive_EnablePin 13 del bornero X3
MCPi-62/112 Regulación AC Brushless digital - Ref.0910
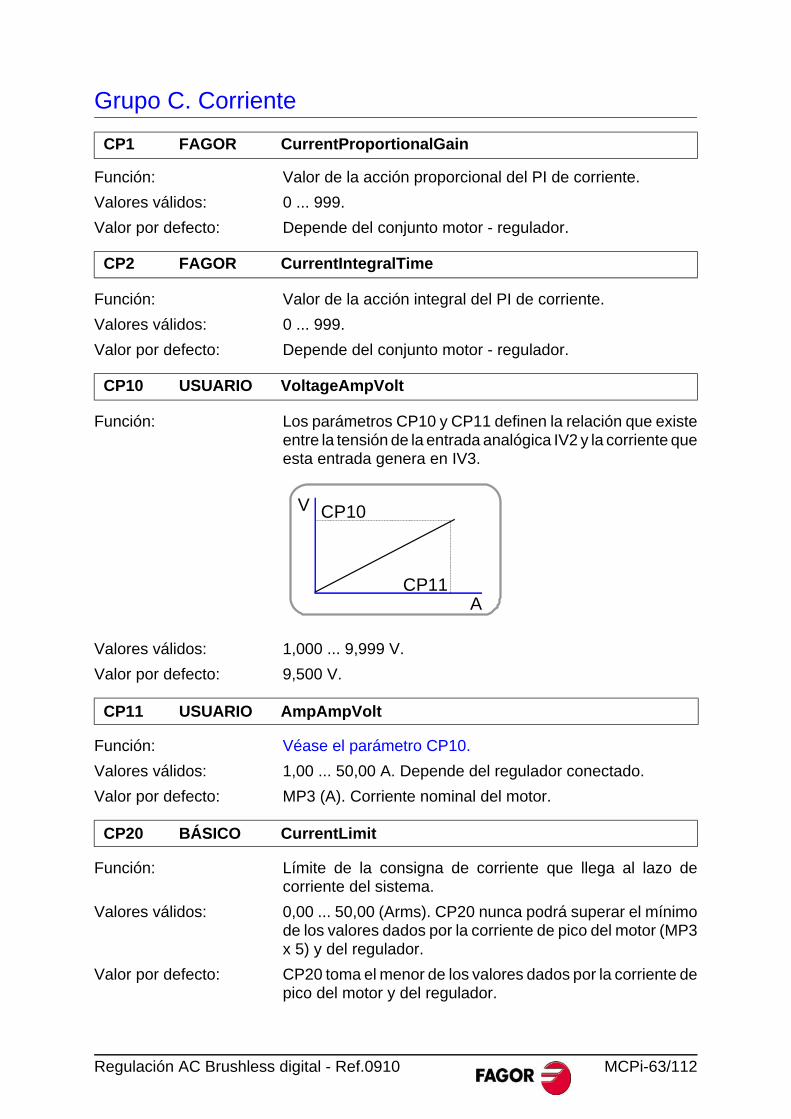
Grupo C. Corriente
Función: Valor de la acción proporcional del PI de corriente.
Valores válidos: 0 ... 999.
Valor por defecto: Depende del conjunto motor - regulador.
Función: Valor de la acción integral del PI de corriente.
Valores válidos: 0 ... 999.
Valor por defecto: Depende del conjunto motor - regulador.
Función: Los parámetros CP10 y CP11 definen la relación que existeentre la tensión de la entrada analógica IV2 y la corriente queesta entrada genera en IV3.
Valores válidos: 1,000 ... 9,999 V.
Valor por defecto: 9,500 V.
Función: Véase el parámetro CP10.
Valores válidos: 1,00 ... 50,00 A. Depende del regulador conectado.
Valor por defecto: MP3 (A). Corriente nominal del motor.
Función: Límite de la consigna de corriente que llega al lazo decorriente del sistema.
Valores válidos: 0,00 ... 50,00 (Arms). CP20 nunca podrá superar el mínimode los valores dados por la corriente de pico del motor (MP3x 5) y del regulador.
Valor por defecto: CP20 toma el menor de los valores dados por la corriente depico del motor y del regulador.
CP1 FAGOR CurrentProportionalGain
CP2 FAGOR CurrentIntegralTime
CP10 USUARIO VoltageAmpVolt
CP11 USUARIO AmpAmpVolt
CP20 BÁSICO CurrentLimit
CP10V
CP11A
Regulación AC Brushless digital - Ref.0910 MCPi-63/112
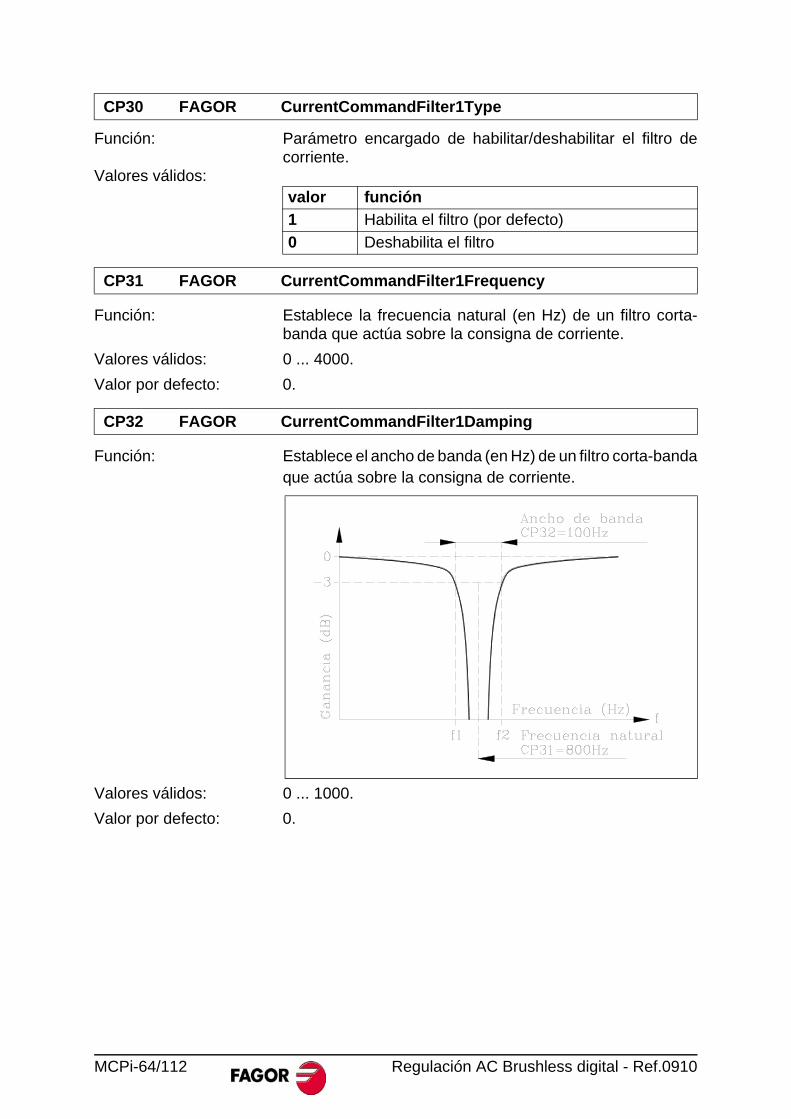
Función: Parámetro encargado de habilitar/deshabilitar el filtro decorriente.
Valores válidos:
Función: Establece la frecuencia natural (en Hz) de un filtro corta-banda que actúa sobre la consigna de corriente.
Valores válidos: 0 ... 4000.
Valor por defecto: 0.
Función: Establece el ancho de banda (en Hz) de un filtro corta-bandaque actúa sobre la consigna de corriente.
Valores válidos: 0 ... 1000.
Valor por defecto: 0.
CP30 FAGOR CurrentCommandFilter1Type
valor función
1 Habilita el filtro (por defecto)
0 Deshabilita el filtro
CP31 FAGOR CurrentCommandFilter1Frequency
CP32 FAGOR CurrentCommandFilter1Damping
MCPi-64/112 Regulación AC Brushless digital - Ref.0910
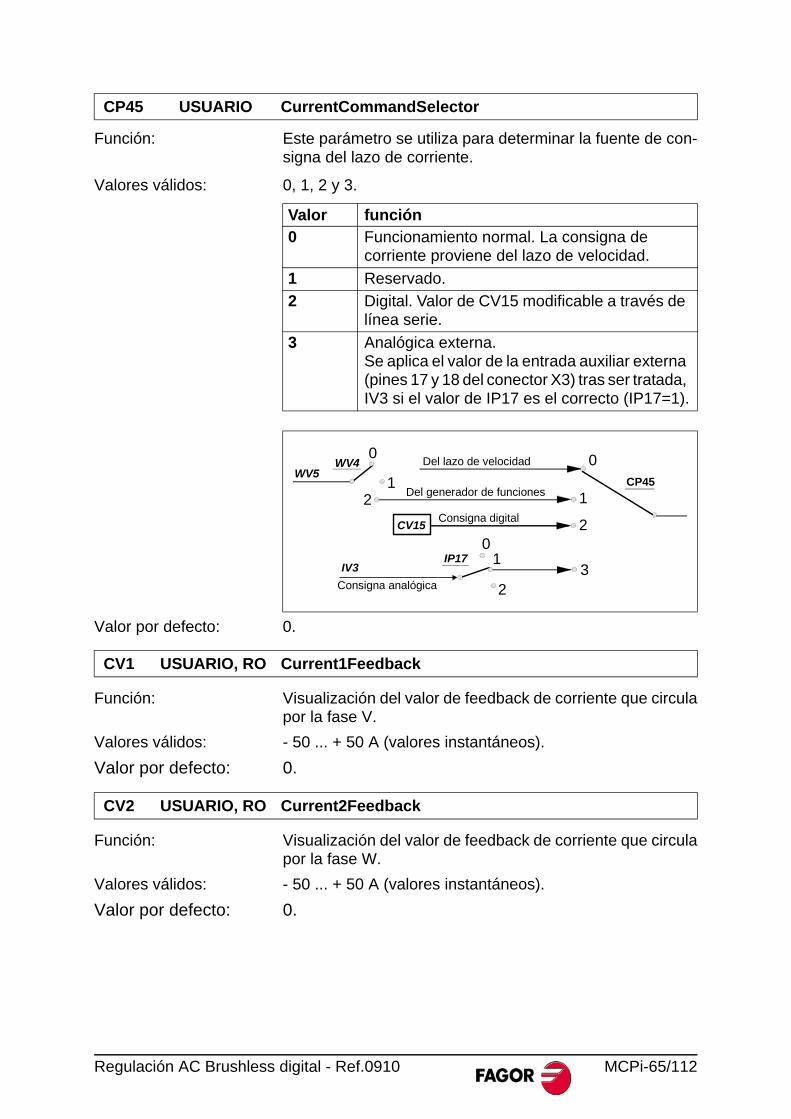
Función: Este parámetro se utiliza para determinar la fuente de con-signa del lazo de corriente.
Valores válidos: 0, 1, 2 y 3.
Valor por defecto: 0.
Función: Visualización del valor de feedback de corriente que circulapor la fase V.
Valores válidos: - 50 ... + 50 A (valores instantáneos).
Valor por defecto: 0.
Función: Visualización del valor de feedback de corriente que circulapor la fase W.
Valores válidos: - 50 ... + 50 A (valores instantáneos).
Valor por defecto: 0.
CP45 USUARIO CurrentCommandSelector
Valor función0 Funcionamiento normal. La consigna de
corriente proviene del lazo de velocidad.
1 Reservado.
2 Digital. Valor de CV15 modificable a través de línea serie.
3 Analógica externa.Se aplica el valor de la entrada auxiliar externa (pines 17 y 18 del conector X3) tras ser tratada, IV3 si el valor de IP17 es el correcto (IP17=1).
CV1 USUARIO, RO Current1Feedback
CV2 USUARIO, RO Current2Feedback
CP45
Del lazo de velocidad
Del generador de funciones
Consigna digital
IV3
Consigna analógica
IP17
0
12
WV5
CV15
WV4
1
2
3
01
2
0
Regulación AC Brushless digital - Ref.0910 MCPi-65/112
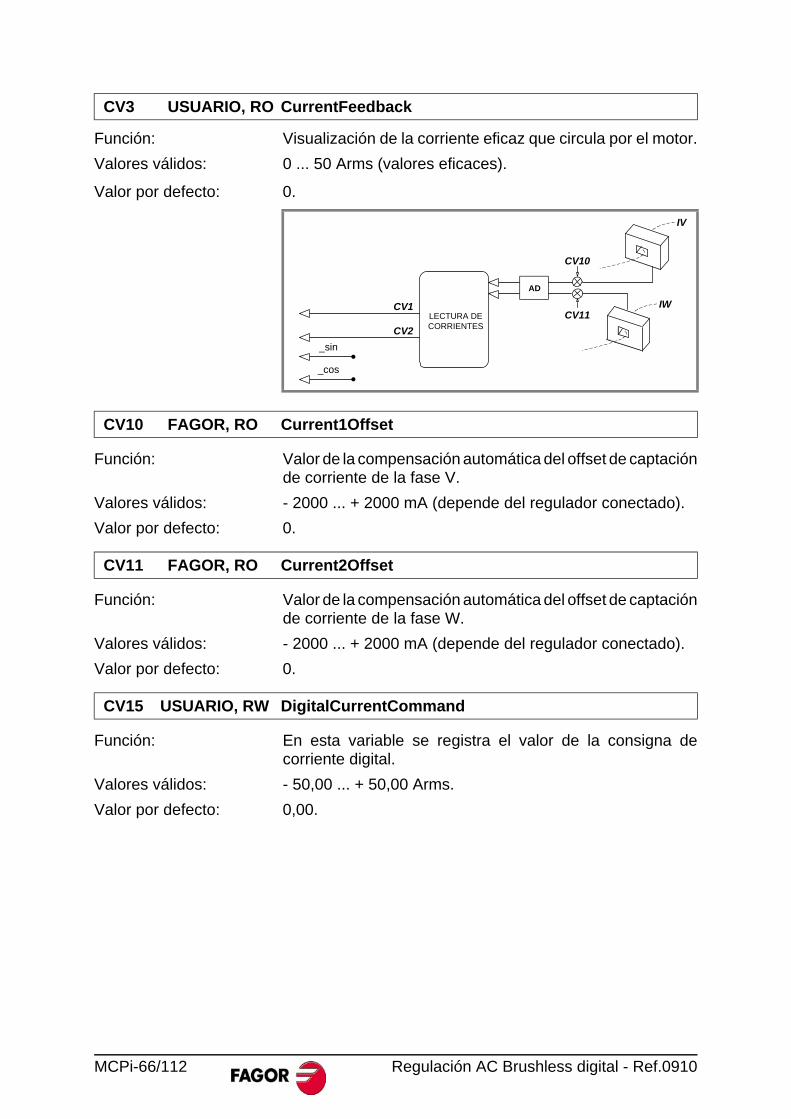
Función: Visualización de la corriente eficaz que circula por el motor.
Valores válidos: 0 ... 50 Arms (valores eficaces).
Valor por defecto: 0.
Función: Valor de la compensación automática del offset de captaciónde corriente de la fase V.
Valores válidos: - 2000 ... + 2000 mA (depende del regulador conectado).
Valor por defecto: 0.
Función: Valor de la compensación automática del offset de captaciónde corriente de la fase W.
Valores válidos: - 2000 ... + 2000 mA (depende del regulador conectado).
Valor por defecto: 0.
Función: En esta variable se registra el valor de la consigna decorriente digital.
Valores válidos: - 50,00 ... + 50,00 Arms.
Valor por defecto: 0,00.
CV3 USUARIO, RO CurrentFeedback
CV10 FAGOR, RO Current1Offset
CV11 FAGOR, RO Current2Offset
CV15 USUARIO, RW DigitalCurrentCommand
LECTURA DE CORRIENTES
CV1
AD
_sin
CV2
CV10
CV11IW
IV
_cos
MCPi-66/112 Regulación AC Brushless digital - Ref.0910
Grupo D. Diagnósticos
Función: Almacena los últimos 5 errores producidos en el regulador.Se trata de un registro de 5 Words que guardan los númerosde los 5 últimos errores originados en el regulador.
Valores válidos: Todos los números de los errores posibles de la versión desoftware cargada. El código 0 significa no error.
Valor por defecto: 0.
Función: La variable DV31 contiene un dato numérico que codificadoen 16 bits del sistema binario representa la situación delsistema en varios aspectos según la tabla adjunta. Bits (demás a menos significativo).
Función: La variable DV32 contiene un dato numérico que codificadoen 16 bits del sistema binario representa las señales de con-trol que actúan sobre el regulador vía línea serie.
DV17 USUARIO, RO HistoricOfErrors
DV31 FAGOR, RO DriveStatusWord
bit función
15, 14 Power & Torque Status.(0,0) DoingInternalTest (DRVSTS_INITIALIZATING)
(0,1) ReadyForPower (DRVSTS_LBUS)
(1,0) PowerOn (DRSTS_POWER_ON)
(1,1) TorqueOn (DRSTS_TORQUE_ON)
13 Error bit.
12 Warning.
11 OperationStatusChangeBit.
10...7 Reservados
6 ReferenceMarkerPulseRegistered
5 ChangeCommandsBit
4...1 Reservados
0 DriveStatusWordToggleBit.
DV32 FAGOR, RW MasterControlWord
bit función
15 Speed Enable
14 Drive Enable
13...7 Reservados
6 Homing Enable
5...1 Reservados
0 MasterControlWordToggleBit
Regulación AC Brushless digital - Ref.0910 MCPi-67/112
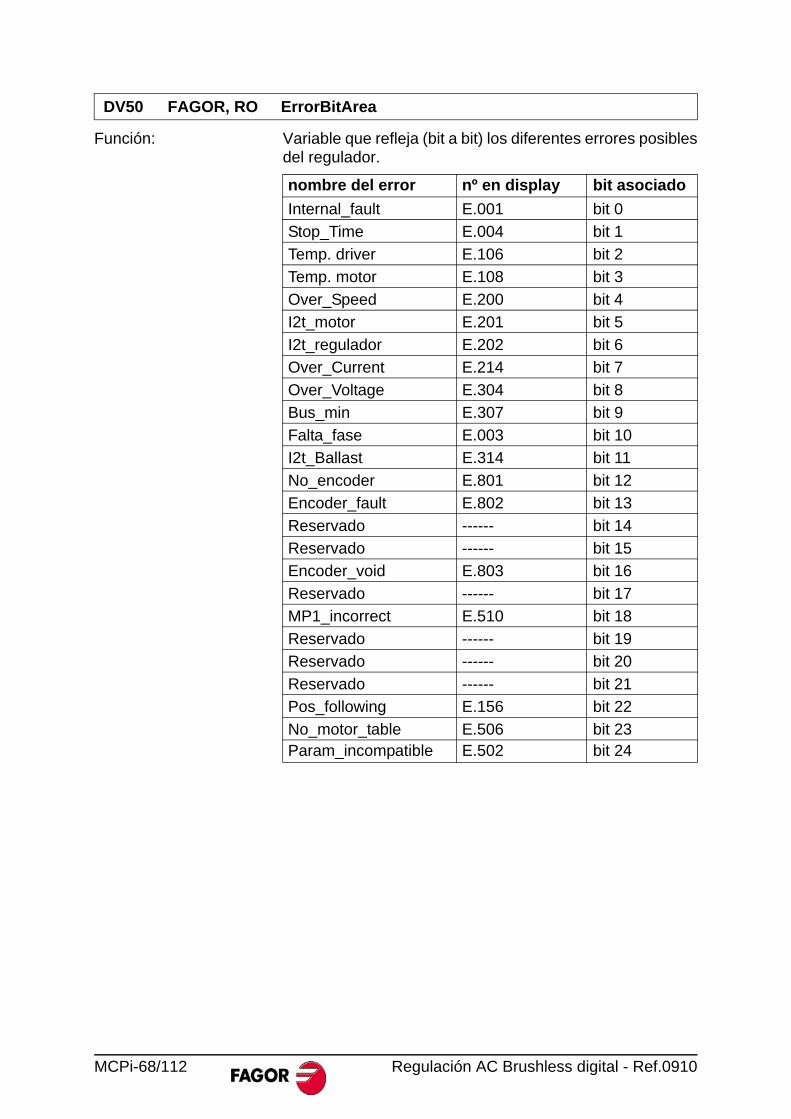
Función: Variable que refleja (bit a bit) los diferentes errores posiblesdel regulador.
DV50 FAGOR, RO ErrorBitArea
nombre del error nº en display bit asociado
Internal_fault E.001 bit 0
Stop_Time E.004 bit 1
Temp. driver E.106 bit 2
Temp. motor E.108 bit 3
Over_Speed E.200 bit 4
I2t_motor E.201 bit 5
I2t_regulador E.202 bit 6
Over_Current E.214 bit 7
Over_Voltage E.304 bit 8
Bus_min E.307 bit 9
Falta_fase E.003 bit 10
I2t_Ballast E.314 bit 11
No_encoder E.801 bit 12
Encoder_fault E.802 bit 13
Reservado ------ bit 14
Reservado ------ bit 15
Encoder_void E.803 bit 16
Reservado ------ bit 17
MP1_incorrect E.510 bit 18
Reservado ------ bit 19
Reservado ------ bit 20
Reservado ------ bit 21
Pos_following E.156 bit 22
No_motor_table E.506 bit 23Param_incompatible E.502 bit 24
MCPi-68/112 Regulación AC Brushless digital - Ref.0910
Función: Variable que refleja (bit a bit) los diferentes avisos (warnings)posibles del regulador.
Función: Reset de los errores del equipo. En el caso de que seproduzca un error, este comando permite resetearlo y rear-mar el equipo, actualizando primero el bit de error de DV31(DriveStatusWord) y posteriormente poniendo el reguladoren estado de ReadyForPower. Nótese su diferencia con elreset del equipo ya que la acción llevada a cabo por estecomando mantiene intacta la memoria RAM y por tanto laparametrización del equipo.
Función: Reset de la variable DV17 HistoricOfErrors (array). Medianteeste comando se pone a 0.
Grupo E. Simulador de encóder
Función: Nº de pulsos que genera el simulador de encóder por cadavuelta del rótor.
Valores válidos: 1 ... Nº de pulsos del captador seleccionado.
Valor por defecto: Nº de pulsos del captador seleccionado.
Función: Selección del sentido de giro del encóder simulado.
Valores válidos: 0/1, giro horario (por defecto) / giro antihorario.
DV51 FAGOR, RO WarningBitArea
nombre del error nº en display bit asociado
I2t_motor E.201 bit 0I2t_regulador E.202 bit 1I2t_Ballast E.314 bit 2No_Ballast E.003 bit 3Absmov_without_homing E.911 bit 4Positive_pos_limit E.917 bit 5Negative_pos_limit E.917 bit 6Pos_block_ini E.157 bit 7
DC1 USUARIO ResetClassDiagnostics
DC2 USUARIO ResetHistoricOfErrors
EP1 BÁSICO EncoderSimulatorPulsesPerTurn
EP3 BÁSICO EncoderSimulatorDirection
Regulación AC Brushless digital - Ref.0910 MCPi-69/112
Grupo G. Generales
Función: Tras la desactivación del Speed_Enable y cumplido untiempo GP3, si el motor no se ha detenido, se desactiva elpar automáticamente y se genera el error E004. Si el motorse detiene dentro del tiempo GP3, también se desactiva elpar aunque sin generar error. Para hacer este tiempo infinito(nunca se genera error E004) debe introducirse en esteparámetro el valor 0.
Valores válidos: 1... 9999 ms, 0 (infinito).
Valor por defecto: 500 ms.
Función: Este parámetro representa la versión de la tabla deparámetros que hay cargada en el regulador.
Función: Tras la parada del motor como consecuencia de ladeshabilitación de la función Speed Enable, la deshabilitaciónde la función Drive Enable (que implica PWM-OFF) se retrasael tiempo indicado por GP9. Resulta de utilidad en ejes nocompensados con freno blocante. Para hacer este tiempoinfinito debe introducirse el valor 0 y para eliminarlo el valor 1.
Valores válidos: 1 ... 9999 ms, 0 (infinito).
Valor por defecto: 50 ms.
Función: Valor del tiempo que se utiliza en las funciones OutFunc1 yOutFunc2.
Valores válidos: 0 ... 9999 ms.
Valor por defecto: 2000 ms.
Función: Visualiza la versión de software en uso.
Función: Registra el valor del checksum de la versión de software car-gada en el regulador.
Valores válidos: - 32768 ... 32767. Si GV5 = 27234, el display muestra 7234.
GP3 BÁSICO StoppingTimeout
GP5 BÁSICO ParameterVersion
GP9 BÁSICO DriveOffDelayTime
GP11 USUARIO IOFunctionsTime
GV2 BÁSICO, RO ManufacturerVersion
GV5 BÁSICO, RO CodeChecksum
MCPi-70/112 Regulación AC Brushless digital - Ref.0910
Función: Variable en la cual se introduce la contraseña para cambiarel nivel de acceso. El sistema cambiará de nivel de accesocorrespondiente a la contraseña introducida.
Valores válidos: 0 ... 9999.
Valor por defecto: 0.
Función: Esta variable informa de la denominación comercial delregulador. Véase apartado “ inicialización y ajuste “ deeste manual.
Función: Variable que realiza un reset del equipo por software.
Valores válidos: 0 y 1 (con 1 se realiza el reset).
Valor por defecto: 0.
Función: Versión de la tabla de motores.
Función: Listado de los números de error activos en el equipo.
Valores válidos: 0 ... 999.
Valor por defecto: 0.
Función: Comando de ejecución de paso de parámetros de RAM aE2PROM.
Función: Comando de inicialización de parámetros. Este comandorealiza la carga de parámetros del regulador, por defecto,para el motor cuya matrícula se almacena en el parámetroMP1. Véase el apartado “ inicialización y ajuste “ de estemanual.
GV7 BÁSICO, RW Password
GV9 BÁSICO, RO DriveType
GV11 BÁSICO, RW SoftReset
GV16 USUARIO, RO MotorTableVersion
GV75 FAGOR, RO ErrorList
GC1 BÁSICO BackupWorkingMemoryCommand
GC10 BÁSICO LoadDefaultsCommand
Regulación AC Brushless digital - Ref.0910 MCPi-71/112
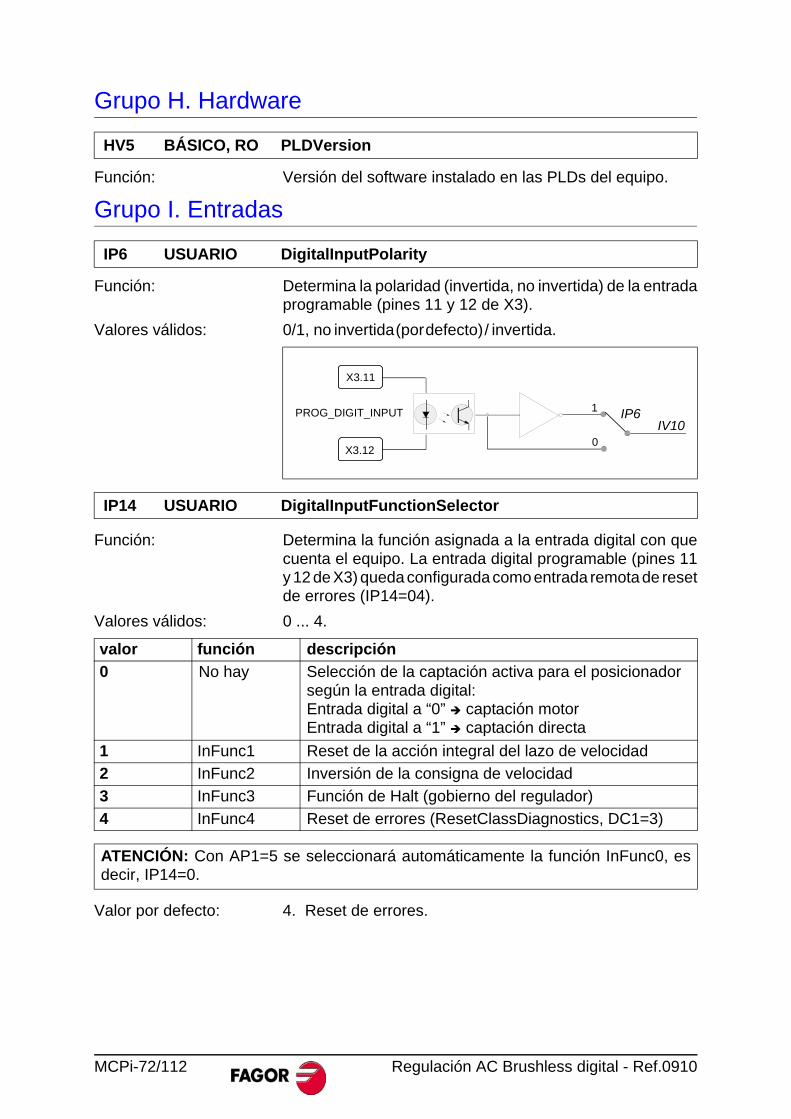
Grupo H. Hardware
Función: Versión del software instalado en las PLDs del equipo.
Grupo I. Entradas
Función: Determina la polaridad (invertida, no invertida) de la entradaprogramable (pines 11 y 12 de X3).
Valores válidos: 0/1, no invertida (por defecto) / invertida.
Función: Determina la función asignada a la entrada digital con quecuenta el equipo. La entrada digital programable (pines 11y 12 de X3) queda configurada como entrada remota de resetde errores (IP14=04).
Valores válidos: 0 ... 4.
Valor por defecto: 4. Reset de errores.
HV5 BÁSICO, RO PLDVersion
IP6 USUARIO DigitalInputPolarity
IP14 USUARIO DigitalInputFunctionSelector
valor función descripción
0 No hay Selección de la captación activa para el posicionador según la entrada digital:Entrada digital a “0” captación motorEntrada digital a “1” captación directa
1 InFunc1 Reset de la acción integral del lazo de velocidad
2 InFunc2 Inversión de la consigna de velocidad
3 InFunc3 Función de Halt (gobierno del regulador)
4 InFunc4 Reset de errores (ResetClassDiagnostics, DC1=3)
ATENCIÓN: Con AP1=5 se seleccionará automáticamente la función InFunc0, esdecir, IP14=0.
X3.12
X3.11
PROG_DIGIT_INPUT IP6IV10
0
1
MCPi-72/112 Regulación AC Brushless digital - Ref.0910
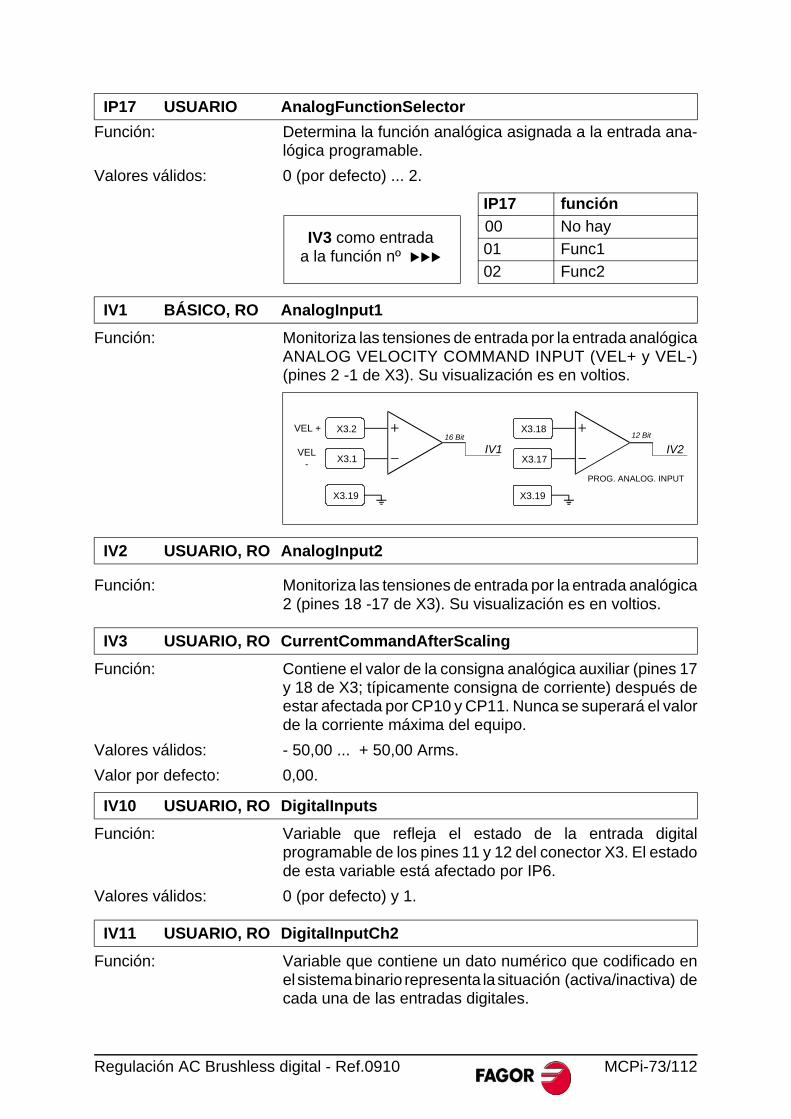
Función: Determina la función analógica asignada a la entrada ana-lógica programable.
Valores válidos: 0 (por defecto) ... 2.
Función: Monitoriza las tensiones de entrada por la entrada analógicaANALOG VELOCITY COMMAND INPUT (VEL+ y VEL-)(pines 2 -1 de X3). Su visualización es en voltios.
Función: Monitoriza las tensiones de entrada por la entrada analógica2 (pines 18 -17 de X3). Su visualización es en voltios.
Función: Contiene el valor de la consigna analógica auxiliar (pines 17y 18 de X3; típicamente consigna de corriente) después deestar afectada por CP10 y CP11. Nunca se superará el valorde la corriente máxima del equipo.
Valores válidos: - 50,00 ... + 50,00 Arms.
Valor por defecto: 0,00.
Función: Variable que refleja el estado de la entrada digitalprogramable de los pines 11 y 12 del conector X3. El estadode esta variable está afectado por IP6.
Valores válidos: 0 (por defecto) y 1.
Función: Variable que contiene un dato numérico que codificado enel sistema binario representa la situación (activa/inactiva) decada una de las entradas digitales.
IP17 USUARIO AnalogFunctionSelector
IP17 función
IV3 como entrada a la función nº
00 No hay
01 Func1
02 Func2
IV1 BÁSICO, RO AnalogInput1
IV2 USUARIO, RO AnalogInput2
IV3 USUARIO, RO CurrentCommandAfterScaling
IV10 USUARIO, RO DigitalInputs
IV11 USUARIO, RO DigitalInputCh2
VEL + X3.2
VEL - X3.1
IV116 Bit
X3.18
X3.17IV2
12 Bit
X3.19
PROG. ANALOG. INPUT
X3.19
Regulación AC Brushless digital - Ref.0910 MCPi-73/112
Grupo K. Monitorización
Función: Contiene el valor de la potencia de la resistencia de Ballastexterna.
Valores válidos: 200 ... 2000 W.
Valor por defecto: 200 W.
Función: Contiene el valor del pulso de energía disipable por laresistencia de Ballast externa.
Valores válidos: 200 ... 2000 J.
Valor por defecto: 200 J.
Función: Visualiza la temperatura a la que se encuentra el refrigeradorde la etapa de potencia.
Valores válidos: 0 ... 200 ° C.
Función: Variable de utilidad interna al sistema. Mide el nivel de cargainterna del cálculo i2t en el regulador en forma de porcentajeutilizado sobre el máximo.
Valores válidos: 0 ... 100 %.
Valor por defecto: 0 %.
Función: Variable de utilidad interna al sistema. Mide el nivel de cargainterna del cálculo i2t en el motor en forma de porcentaje uti-lizado sobre el máximo.
Valores válidos: 0, ..., 100 %.
Valor por defecto: 0 %.
Función: Muestra el porcentaje de carga sobre la resistencia de Ballasten un regulador. Útil para la protección i2t de dicharesistencia. Un valor superior a 100 % en esta variable harásaltar el error E314.
Valores válidos: 0 ... 100 %.
Valor por defecto: 0 %.
KP3 USUARIO ExtBallastPower
KP4 USUARIO ExtBallastEnergyPulse
KV10 USUARIO, RO CoolingTemperature
KV32 USUARIO, RO I2tDrive
KV36 USUARIO, RO I2tMotor
KV40 USUARIO, RO IntBallastOverload
MCPi-74/112 Regulación AC Brushless digital - Ref.0910
Función: Selector que determina si la resistencia de recuperación esexterna o interna.
Valores válidos: 0/1 Externa / Interna (por defecto).
Grupo L. Motion Control
Función: Se emplea como valor asignado al parámetro V (VELOCITY)dentro de la aplicación de MC (*. mc) en el módulo JOG.Velocidad para todos los movimientos en modo manual(JOG).
Valores válidos: 0 ... 6000 rev/min.
Valor por defecto: 1000 rev/min.
Función: Desplazamiento realizado por cada movimiento en modomanual incremental con cada flanco de subida de las señalesde JOG. Se emplea como valor asignado al parámetro D(DISTANCE) en los movimientos de JOG incremental pro-gramados en el módulo manual del programa de Motion Con-trol.
Valores válidos: 0 ... 214748 mm.
Valor por defecto: 1 mm.
Función: Mediante este parámetro se puede gobernar el kernel delposicionador de forma remota a través de ModBus utilizandola línea serie del regulador. La selección “hardware/software”se realiza de modo total ó individual. Si el control seleccio-nado es:
KV41 USUARIO, RW BallastSelect
LP22 FAGOR JogVelocity
LP23 FAGOR JogIncrementalPosition
LP48 FAGOR PositionActionsSelect
Valores válidos: 0. (hardware), el estado de las “entradas hardware” dedi-cadas al kernel queda reflejado en su variable corre-spondiente.
1. (software), el estado de las “entradas hardware” notiene efecto sobre su variable asociada y el control dela funcionalidad de la variable es totalmente por soft-ware.
Véase apartado: Descripción del proceso
Regulación AC Brushless digital - Ref.0910 MCPi-75/112
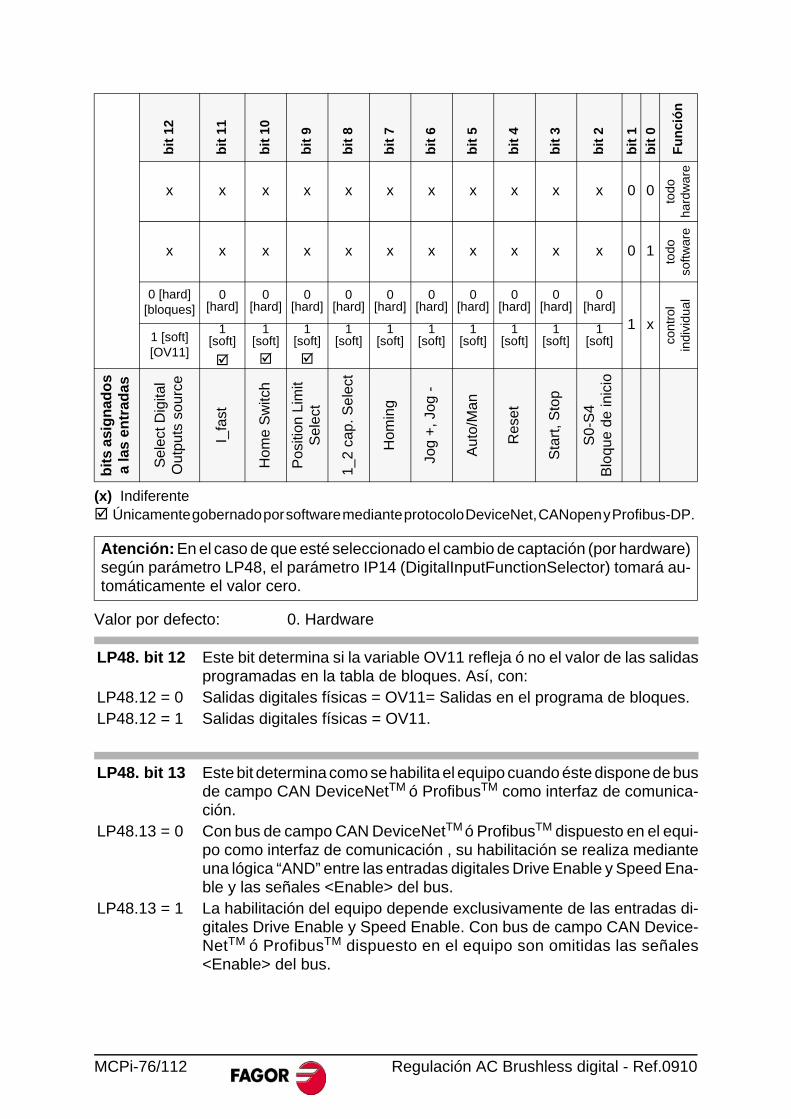
Valor por defecto: 0. Hardware
bit
12
bit
11
bit
10
bit
9
bit
8
bit
7
bit
6
bit
5
bit
4
bit
3
bit
2
bit
1
bit
0
Fu
nci
ón
x x x x x x x x x x x 0 0
todo
ha
rdw
are
x x x x x x x x x x x 0 1
todo
so
ftwar
e
0 [hard] [bloques]
0 [hard]
0 [hard]
0 [hard]
0 [hard]
0 [hard]
0 [hard]
0 [hard]
0 [hard]
0 [hard]
0 [hard]
1 x
cont
rol
indi
vidu
al
1 [soft][OV11]
1 [soft]
1 [soft]
1 [soft]
1 [soft]
1 [soft]
1 [soft]
1 [soft]
1 [soft]
1 [soft]
1 [soft]
bit
s as
ign
ado
s a
las
entr
adas
Sel
ect D
igita
l O
utpu
ts s
ourc
e
I_fa
st
Hom
e S
witc
h
Pos
ition
Lim
it S
elec
t
1_2
cap.
Sel
ect
Hom
ing
Jog
+, J
og -
Aut
o/M
an
Res
et
Sta
rt, S
top
S0-
S4
Blo
que
de in
icio
(x) Indiferente Únicamente gobernado por software mediante protocolo DeviceNet, CANopen y Profibus-DP.
Atención: En el caso de que esté seleccionado el cambio de captación (por hardware)según parámetro LP48, el parámetro IP14 (DigitalInputFunctionSelector) tomará au-tomáticamente el valor cero.
LP48. bit 12 Este bit determina si la variable OV11 refleja ó no el valor de las salidasprogramadas en la tabla de bloques. Así, con:
LP48.12 = 0 Salidas digitales físicas = OV11= Salidas en el programa de bloques. LP48.12 = 1 Salidas digitales físicas = OV11.
LP48. bit 13 Este bit determina como se habilita el equipo cuando éste dispone de busde campo CAN DeviceNetTM ó ProfibusTM como interfaz de comunica-ción.
LP48.13 = 0 Con bus de campo CAN DeviceNetTM ó ProfibusTM dispuesto en el equi-po como interfaz de comunicación , su habilitación se realiza medianteuna lógica “AND” entre las entradas digitales Drive Enable y Speed Ena-ble y las señales <Enable> del bus.
LP48.13 = 1 La habilitación del equipo depende exclusivamente de las entradas di-gitales Drive Enable y Speed Enable. Con bus de campo CAN Device-NetTM ó ProfibusTM dispuesto en el equipo son omitidas las señales<Enable> del bus.
MCPi-76/112 Regulación AC Brushless digital - Ref.0910
Función: Ventana que determina el rango de posición para el que seconsidera que ya puede producirse el evento INBAND en latabla de posicionamiento.
Función: A través de este parámetro se activa ó desactiva la super-visión del estado de carga de la pila en aplicaciones enlas que se dispone de encóders absolutos con pila.
Ver aviso E.820.
Función: En ejes rotativos y seleccionado el formato módulo (véasebit 7 de PP76), la interpretación de la consigna de posicióndepende de este parámetro.
Valores válidos: 0, 1 y 2.
Valor por defecto: 2.
Función: Indica cual es el modo de operación del kernel.
Función: Indica cual es el modo de ejecución del kernel tanto para elmodo automático como para el modo manual.
LP49 FAGOR InBandPosition
Valores válidos: 0 ... 214748
Valor por defecto: 0
LP115 USUARIO EnableBatteryLowWarning
Valores válidos: 0/1. supervisión deshabilitada / supervisión habilitada.Valor por defecto: 0. supervisión deshabilitada.
LP143 FAGOR ModuleCommandMode
bit función
15 (MSB), ..., 2 (reservados)
1, 0 (LSB)
(0,0) Giro horario(0,1) Giro antihorario(1,0) Giro por el camino más corto (por defecto)(1,1) Reservado
LV13 FAGOR, RW KernelOperationMode
Valores válidos: 0. Modo automático (por defecto) tras el arranque del regulador.
1. Modo manual.
LV14 FAGOR, RW KernelAutoMode
Valores válidos: 0. Continuo (por defecto).1. Bloque a bloque.
Regulación AC Brushless digital - Ref.0910 MCPi-77/112
Función: Señal digital que establece con su flanco de subida (paso de0 a 1) el arranque de la ejecución del programa de MC enmodo automático ó manual. El inicio de la ejecución a travésde esta señal de START es necesario siempre tras el encen-dido del sistema, ó bien tras la activación de las señales deSTOP ó RESET. También es necesario generar un flanco desubida en esta señal para continuar con la ejecución cuandose está en modo “ bloque a bloque ” ó “instrucción a instruc-ción“.
Función: Señal digital que establece con su flanco de subida (paso de0 a 1) la suspensión momentánea del bloque de movimientoy detiene el giro del motor. Esta señal no da el bloque porfinalizado, sólamente lo interrumpe, de forma que cuando seactive la señal START, LV15 - KernelStartSignal -continuará con la parte pendiente.
Función: Señal digital que establece con su flanco de subida (paso de0 a 1) el reinicio (reset) de la ejecución del programa deMotion Control. Esta señal detiene la ejecución, restaura lascondiciones iniciales y el regulador se queda en espera deuna nueva señal de arranque LV15 - KernelStartSignal -.
Función: Indica cual es el submodo de funcionamiento dentro delmodo manual (LV13 = 1).
Función: Señal digital empleada dentro de la aplicación de MC (*.mc)en el módulo JOG para activar el movimiento de jog en sen-tido positivo.
Función: Señal digital empleada dentro de la aplicación de MC (*.mc)en el módulo JOG para activar el movimiento de jog en sen-tido negativo.
LV15 FAGOR, RW KernelStartSignal
Valores válidos: 0. Continuo (por defecto).
1. Bloque a bloque.
LV16 FAGOR, RW KernelStopSignal
LV17 FAGOR, RW KernelResetSignal
LV19 FAGOR, RW KernelManMode
Valores válidos: 0. Submodo continuo (por defecto).1. Submodo incremental.
LV20 FAGOR, RW JogPositiveSignal
LV21 FAGOR, RW JogNegativeSignal
MCPi-78/112 Regulación AC Brushless digital - Ref.0910
Función: Variable que devuelve el valor de la distancia total a recorrerdel bloque de posicionamiento actual, o del último que sehaya ejecutado de no haber ninguno en marcha. Su valor seactualiza cada vez que se lanza un nuevo bloque de posi-cionamiento.
Valores válidos: - 214748 ... 214748 mm.
Función: Variable que devuelve para un instante dado la distanciarecorrida en el bloque de posicionamiento actual o del últimoque se haya ejecutado de no haber ninguno en marcha. Suvalor se actualiza por el interpolador en cada ciclo de inter-polación.
Valores válidos: - 214748 ... 214748 mm.
Función: Posición final para el bloque de posicionamiento en curso.Nótese que en el modo de funcionamiento actual la posiciónfinal especificada en la sentencia MOVE en ejecución secopia a la variable LV158 - TargetPosition - .
Valores válidos: - 214748 ... 214748 (mm ó grados).
Unidades: Para ejes rotativos (grados) y para ejes lineales (mm).
Función: Velocidad de posicionamiento máxima para el bloque deposicionamiento en curso (en módulo). Nótese que en elmodo de funcionamiento actual la velocidad de posiciona-miento especificada en la sentencia MOVE en ejecución secopia la variable LV159 - PositioningVelocity - .
Valores válidos: 0 ... 214748 m/min.
Valor por defecto: 0.
Función: Aceleración máxima aplicada a todos los bloques de posi-cionamiento (en módulo).
Valores válidos: 0 ... 65535 mm/s2.
Valor por defecto: 20 mm/s2.
Función: Aceleración máxima aplicada a todos los bloques de posi-cionamiento cuando se realimenta con captación directa.
Valores válidos: 0 ... 65535 mm/s2.
Valor por defecto: 20 mm/s2.
LV35 FAGOR, RO BlockTravelDistance
LV36 FAGOR, RO BlockCoveredDistance
LV158 FAGOR, RO TargetPosition
LV159 FAGOR, RO PositioningVelocity
LV160 FAGOR, RW PositioningAcceleration
LV161 FAGOR, RW PositioningAcceleration2
Regulación AC Brushless digital - Ref.0910 MCPi-79/112
Función: Marca indicativa de que el interpolador ha alcanzado laposición final; es decir, se activa cuando la consigna deposición PV47 - PositionCommand - alcanza LV158 -Tar-getPosition -.
Valores válidos: 0 y 1.
Grupo M. Motor
Función: Identificación del motor. Del valor que tome MP1 dependentanto los límites de algunos parámetros (p. ej: el límite supe-rior de SP10 es el 110 % de la velocidad nominal del motor)como la propia inicialización de los parámetros por defectode él a través de GC10. Véase el comando GC10.
Función: Contiene la constante de par del motor síncrono (el par motoren función de la corriente eficaz).
Valores válidos: 0,0 ... 10,0 Nm/Arms.
Valor por defecto: Depende del motor conectado.
Función: Contiene la corriente nominal del motor. Si se manipula MP3puede afectar directamente al parámetro CP20.Véase el parámetro CP20.
Valores válidos: 0,00 ... 50,00 Arms. Depende del motor conectado.
Valor por defecto: Depende del motor conectado.
Función: Corriente de pico del motor. Este valor de corriente no debesuperarse nunca en el motor. Véase el parámetro CP20.
Valores válidos: 0,00 ... 50,00 Arms. Depende del motor conectado.
Valor por defecto: Depende del motor conectado.
LV242 FAGOR, RO TargetPositionAttained
MP1 BÁSICO MotorType
MP2 FAGOR MotorTorqueConstant
MP3 FAGOR MotorContinuousStallCurrent
MP4 FAGOR MotorPeakCurrent
MCPi-80/112 Regulación AC Brushless digital - Ref.0910
Grupo N. Configuración del eje lineal
Función: Indica cual es la resolución del captador en la captacióndirecta.
Unidades: Si el captador es lineal (una regla), el período de la señal decaptación se da en micras (µm). Para reglas FAGOR (cristalgrabado) la resolución es de 20 micras. es decir:
Si el captador es rotativo (un encóder), la resolución de laseñal de captación se da en pulsos por vuelta.
Valores válidos: 0... 65535.
Valor por defecto: 4096 pulsos por vuelta (ppv) del captador rotativo.
Función: Indica cual es la resolución del captador lineal empleadocomo captación directa. Para un captador rotativo esteparámetro no tiene ningún efecto. Si la señal de captaciónes modificada por un multiplicador externo, el valor de esteparámetro debe reflejar su efecto.
Unidades: El período de la señal de captación se da en micras (µm).Para reglas FAGOR (cristal grabado) la resolución es de 20µm. es decir:
En el caso de reglas Fagor (fleje metálico) la resolución esde 100 mµ, es decir:
Si se aplica un multiplicador (x5) a una regla Fagor COVX (20mµ), entonces: NP118=4.
Valores válidos: 0,0 ... 6553,5 µm.
Valor por defecto: 20,0 µm.
Función: Definen la relación de transmisión entre el eje del motor y eleje final que mueve la máquina.
NP117 FAGOR ResolutionOfFeedback2
NP117=20
NP118 FAGOR ResolutionOfLinearFeedback
NP118=20
NP118=100
NP121 FAGOR InputRevolutions
NP122 FAGOR OutputRevolutions
Regulación AC Brushless digital - Ref.0910 MCPi-81/112
Por ejemplo, si 5 vueltas del eje del motor suponen 3 vueltasde husillo de la máquina, el valor de estos parámetros es:
Valores válidos: 1... 65535 vueltas
Valor por defecto: 1 vuelta en ambos parámetros (acoplo directo).
Función: Definen la relación entre el desplazamiento lineal de lamáquina y el eje que la mueve. Por ejemplo, si cada vueltade husillo supone un desplazamiento de 4 mm de la mesa,el valor para este parámetro es:
Valores válidos: 0 ... 214748 mm.
Valor por defecto: 5000 µm (5 mm por vuelta).
Función: Definen la relación de transmisión entre la captación directay el movimiento de la carga. Por ejemplo, si 5 vueltas del ejedel encóder de la captación directa son debidas a 3 vueltasde husillo de la máquina, el valor de estos parámetros deberáser:
Valores válidos: 1... 65535 vueltas.
Valor por defecto: 1 vuelta en ambos parámetros (acoplamiento directo).
Función: Define el desplazamiento lineal de la máquina por vuelta delencóder de la captación directa. Para máquina rotativa:
Para máquina lineal con captación directa lineal:
NP121=5NP122=3
NP123 FAGOR FeedConstant
NP123=4
Si el eje es rotativo: NP123=360 (360° por vuelta)
NP131 FAGOR InputRevolutions2
NP132 FAGOR OutputRevolutions2
NP131=5NP132=3
NP133 FAGOR FeedConstant2
NP133=0 (no tiene sentido en esta aplicación).
NP133=0 (no tiene sentido en esta aplicación).
MCPi-82/112 Regulación AC Brushless digital - Ref.0910
Para máquina lineal con captación directa rotativa:
Valores válidos: 0 ... 214768 mm.
Valor por defecto: 5 mm.
Grupo O. Salidas analógicas y digitales
Función: Identifican a las variables analógicas internas del reguladorque serán plasmadas en las salidas eléctricas y serán afecta-das por la ganancia OP3 y OP4 respectivamente. Canal 1(pin 31 de X3) y canal 2 (pin 32 de X3).
Valores válidos: Nombre de cualquier parámetro o variable de la tabla.
Valor por defecto: 04 en el caso de OP1 y 07 en el de OP2.
- Si R1= R2; NP133 = 0.El desplazamiento lineal frente al nº de vueltas de ambosencóders es el mismo.- Si R1 R2; NP133 0.Debe parametrizarse este valor para que la captación directaquede bien definida.- Si NP133 se pone a valor cero.Se toma como paso de husillo el valor dado en NP123.
Ejemplo 1.
Ataque del motor con correa dentada con una relación de transmisión 1: 2, paso dehusillo de 10 mm y encóder externo solidario al husillo.
NP121=1, NP122=2, NP123=10 mmNP131=1, NP132=1, NP133=10 mm (puede dejarse a cero).
Ejemplo 2.
Aplicación de Motion Control (rodillos cíclicos) con rueda de medida.Desarrollo de los rodillos: NP121=5, NP122=2, NP123=100 mmDesarrollo de la rueda: NP131=1, NP132=1, NP133=314,15 mmCAPTACIÓN MOTOR y HUSILLO MESA.
OP1 USUARIO DA1IDN
OP2 USUARIO DA2IDN
OP1 VAR. NOMBRE OP2 VAR. UNID.
00 SV15 DigitalVelocityCommand 00 SV15
rev/min01 SV1 VelocityCommand 01 SV1
02 SV6 VelocityCommandAfterFil- 02 SV6
03 SV7 VelocityCommandFinal 03 SV7
04 SV2 VelocityFeedback 04 SV2
Regulación AC Brushless digital - Ref.0910 MCPi-83/112
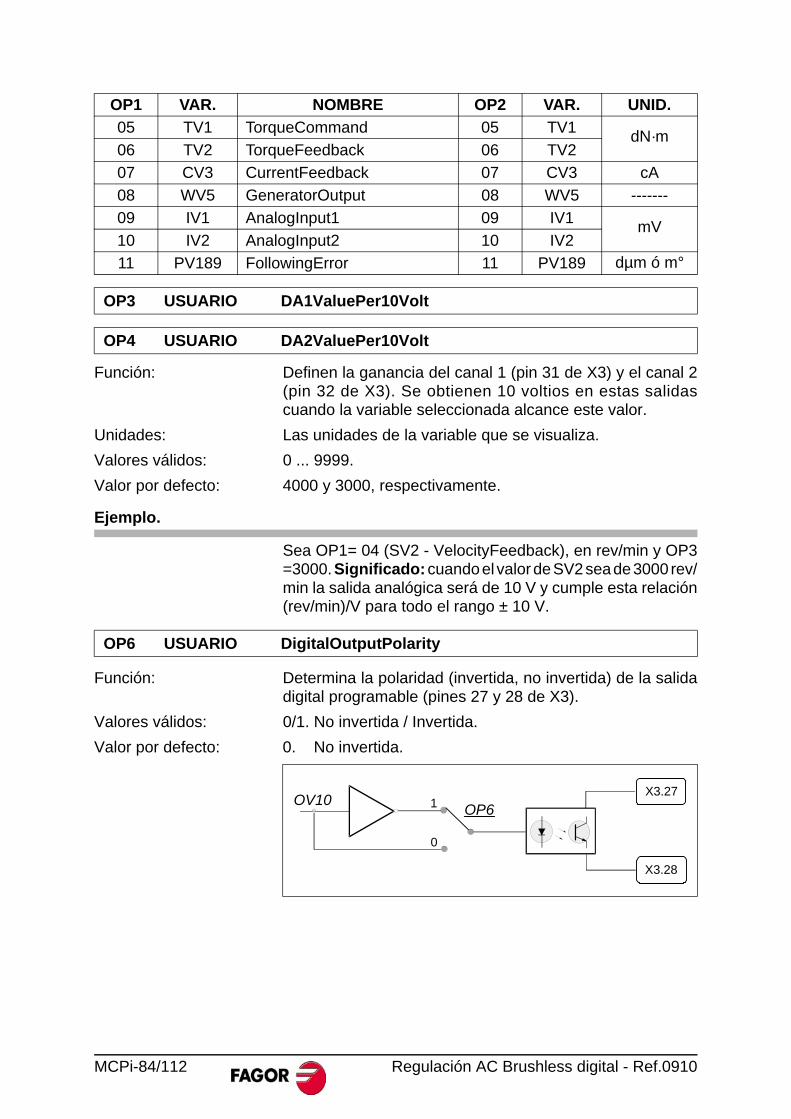
Función: Definen la ganancia del canal 1 (pin 31 de X3) y el canal 2(pin 32 de X3). Se obtienen 10 voltios en estas salidascuando la variable seleccionada alcance este valor.
Unidades: Las unidades de la variable que se visualiza.
Valores válidos: 0 ... 9999.
Valor por defecto: 4000 y 3000, respectivamente.
Sea OP1= 04 (SV2 - VelocityFeedback), en rev/min y OP3=3000. Significado: cuando el valor de SV2 sea de 3000 rev/min la salida analógica será de 10 V y cumple esta relación(rev/min)/V para todo el rango ± 10 V.
Función: Determina la polaridad (invertida, no invertida) de la salidadigital programable (pines 27 y 28 de X3).
Valores válidos: 0/1. No invertida / Invertida.
Valor por defecto: 0. No invertida.
05 TV1 TorqueCommand 05 TV1dN·m
06 TV2 TorqueFeedback 06 TV2
07 CV3 CurrentFeedback 07 CV3 cA
08 WV5 GeneratorOutput 08 WV5 -------
09 IV1 AnalogInput1 09 IV1mV
10 IV2 AnalogInput2 10 IV2
11 PV189 FollowingError 11 PV189 dµm ó m°
OP3 USUARIO DA1ValuePer10Volt
OP4 USUARIO DA2ValuePer10Volt
Ejemplo.
OP1 VAR. NOMBRE OP2 VAR. UNID.
OP6 USUARIO DigitalOutputPolarity
OV10
0
1X3.27
X3.28
OP6
MCPi-84/112 Regulación AC Brushless digital - Ref.0910
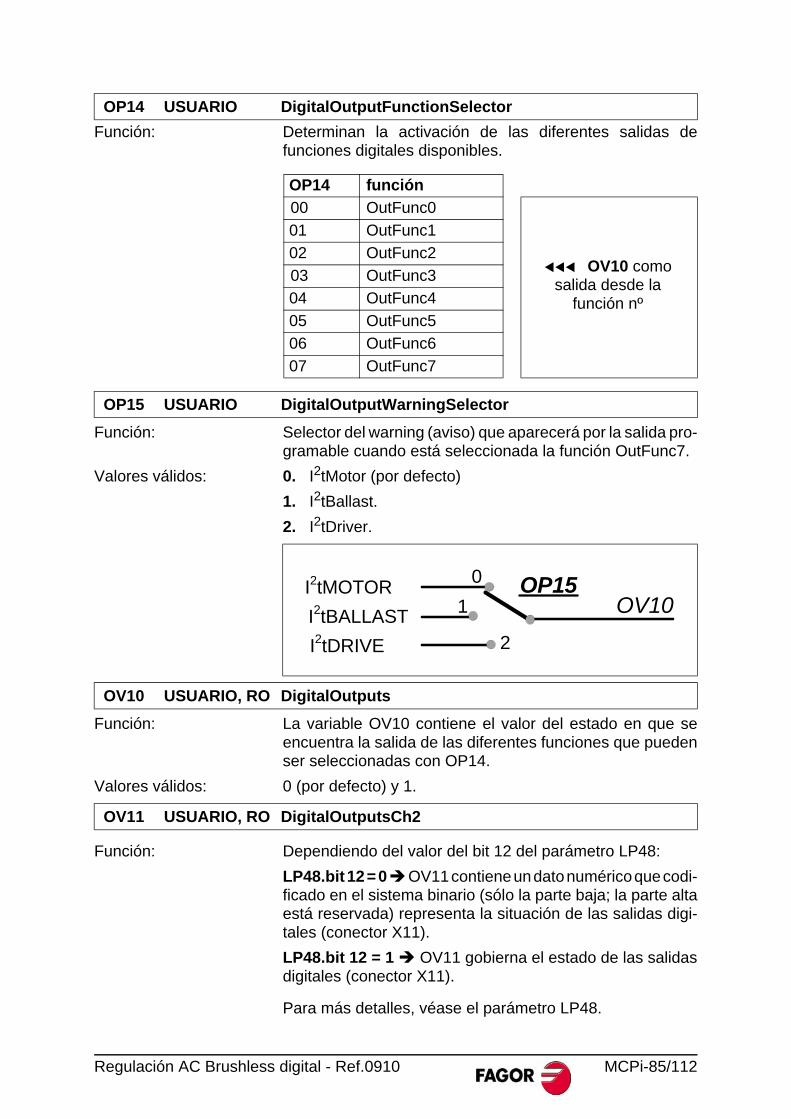
Función: Determinan la activación de las diferentes salidas defunciones digitales disponibles.
Función: Selector del warning (aviso) que aparecerá por la salida pro-gramable cuando está seleccionada la función OutFunc7.
Valores válidos: 0. I2tMotor (por defecto)
1. I2tBallast.
2. I2tDriver.
Función: La variable OV10 contiene el valor del estado en que seencuentra la salida de las diferentes funciones que puedenser seleccionadas con OP14.
Valores válidos: 0 (por defecto) y 1.
Función: Dependiendo del valor del bit 12 del parámetro LP48:
LP48.bit 12 = 0 OV11 contiene un dato numérico que codi-ficado en el sistema binario (sólo la parte baja; la parte altaestá reservada) representa la situación de las salidas digi-tales (conector X11).
LP48.bit 12 = 1 OV11 gobierna el estado de las salidasdigitales (conector X11).
Para más detalles, véase el parámetro LP48.
OP14 USUARIO DigitalOutputFunctionSelector
OP14 función
00 OutFunc0
OV10 como salida desde la
función nº
01 OutFunc1
02 OutFunc2
03 OutFunc3
04 OutFunc4
05 OutFunc5
06 OutFunc6
07 OutFunc7
OP15 USUARIO DigitalOutputWarningSelector
OV10 USUARIO, RO DigitalOutputs
OV11 USUARIO, RO DigitalOutputsCh2
OV10I2tMOTOR
I2tBALLAST
I2tDRIVE
OP15
2
0
1
Regulación AC Brushless digital - Ref.0910 MCPi-85/112
Grupo P. Lazo de posición
Función: Velocidad lenta en el proceso de búsqueda de cero contro-lado desde el propio regulador. Este parámetro es necesariocuando se realiza la búsqueda de cero controlada desde elregulador: PC148 - DriveControlledHoming - activo.
Valores válidos: 0 ... 6000 rev/min del motor.
Valor por defecto: 100 rev/min del motor.
Función: Velocidad rápida en el proceso de búsqueda de cero con-trolado desde el propio regulador. Este parámetro es nece-sario cuando se realiza la búsqueda de cero controlada desdeel regulador: PC148 - DriveControlledHoming - activo.
Valores válidos: 0 ... 6000 rev/min del motor.
Valor por defecto: 200 rev/min del motor.
Función: Aceleración aplicada en el proceso de búsqueda de cerocontrolado desde el propio regulador. Este parámetro esnecesario al realizar una búsqueda de cero controlada desdeel regulador: PC148 - DriveControlled Homing - activo.
Valores válidos: 0 ... 65535 rad/s2.
Valor por defecto: 20 rad/s2.
Función: Delimitan la zona permitida para los movimientos del eje.Estos límites son considerados sólo si previamente se harealizado una búsqueda de I0, es decir, el bit 0 de PV203 - PositionFeedbackStatus - vale 1 (se ha ejecutado elcomando PC148 - DriveControlledHoming -.
Si la variable PV47 - PositionCommand - genera unmovimiento del eje que lo aleja de la zona permitida seactivarán los avisos (warnings) 500 (si límite positivo) ó 501(si límite negativo).
Si la variable LV158 - TargetPosition - sobrepasa los límitesde posición, el regulador activa el bit 13 (TargetPositionOutsideTheTravelZone) de DV158 - Class2Diagnostics(Warnings) - .
PP1 FAGOR HomingVelocitySlow
PP41 FAGOR HomingVelocityFast
PP42 FAGOR HomingAcceleration
PP49 FAGOR PositivePositionLimit
PP50 FAGOR NegativePositionLimit
MCPi-86/112 Regulación AC Brushless digital - Ref.0910
Valores válidos: - 214748 ... 214748 mm.
Función: Con captación motor, este parámetro describe la distanciaentre el cero máquina y el punto de referencia de la máquina.Es similar al parámetro REFVALUE (P53) de los ejes delCNC 8055/55i.
Valores válidos: - 214748 ... 214748 mm.
Valor por defecto: 0.
Función: Con captación directa, este parámetro describe la distanciaentre el cero máquina y el punto de referencia de la máquina.Es similar al parámetro REFVALUE (P53) de los ejes delCNC 8055/55i.
Valores válidos: - 214748 ... 214748 mm.
Valor por defecto: 0.
Función: Registro de 16 bits utilizable para activar o desactivar loslímites de posición e invertir o no el signo del valor de la con-signa de posición. Considérese en motores rotativos que siel signo de la variación de la consigna de posición es positivo,el giro será en sentido horario.
Valores por defecto: Para ejes lineales:PP49=214748 mm y PP50 = - 214748 mm Para ejes rotativos:PP49=214748° y PP50= - 214748°
PP52 FAGOR ReferenceDistance1
PP54 FAGOR ReferenceDistance2
PP55 FAGOR PositionPolarityParameters
Nº bit Significado
15 (MSB), 14, 13, 12, 11, 10, 9, 8, 7, 6, 5 - reservados
4 Límites de posición.= 0 Desactiva los límites de posición= 1 Activa los límites de posición (por defecto).
Véanse los parámetros PP49 y PP50.
3, 2, 1 Reservados
0 (LSB) Signo del valor de la consigna de posición.= 0 No invertido= 1 Invertido (por defecto)
Regulación AC Brushless digital - Ref.0910 MCPi-87/112
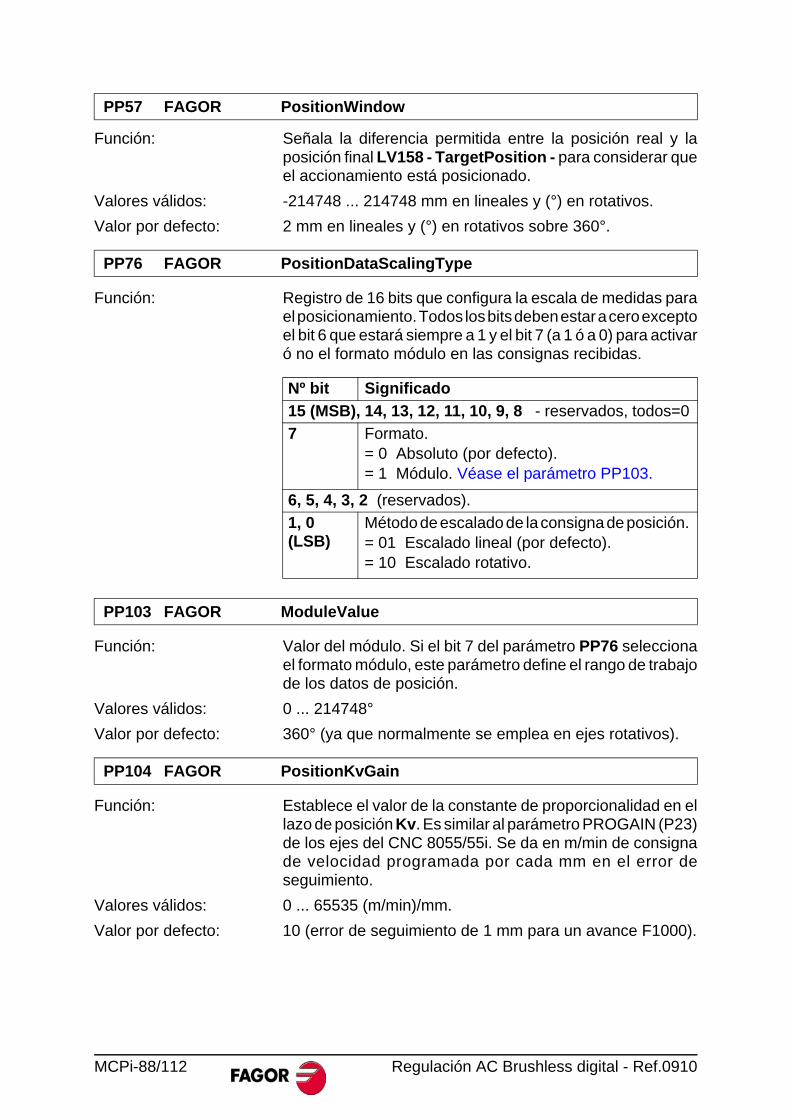
Función: Señala la diferencia permitida entre la posición real y laposición final LV158 - TargetPosition - para considerar queel accionamiento está posicionado.
Valores válidos: -214748 ... 214748 mm en lineales y (°) en rotativos.
Valor por defecto: 2 mm en lineales y (°) en rotativos sobre 360°.
Función: Registro de 16 bits que configura la escala de medidas parael posicionamiento. Todos los bits deben estar a cero exceptoel bit 6 que estará siempre a 1 y el bit 7 (a 1 ó a 0) para activaró no el formato módulo en las consignas recibidas.
Función: Valor del módulo. Si el bit 7 del parámetro PP76 seleccionael formato módulo, este parámetro define el rango de trabajode los datos de posición.
Valores válidos: 0 ... 214748°
Valor por defecto: 360° (ya que normalmente se emplea en ejes rotativos).
Función: Establece el valor de la constante de proporcionalidad en ellazo de posición Kv. Es similar al parámetro PROGAIN (P23)de los ejes del CNC 8055/55i. Se da en m/min de consignade velocidad programada por cada mm en el error deseguimiento.
Valores válidos: 0 ... 65535 (m/min)/mm.
Valor por defecto: 10 (error de seguimiento de 1 mm para un avance F1000).
PP57 FAGOR PositionWindow
PP76 FAGOR PositionDataScalingType
Nº bit Significado
15 (MSB), 14, 13, 12, 11, 10, 9, 8 - reservados, todos=0
7 Formato.= 0 Absoluto (por defecto).= 1 Módulo. Véase el parámetro PP103.
6, 5, 4, 3, 2 (reservados).
1, 0 (LSB)
Método de escalado de la consigna de posición.= 01 Escalado lineal (por defecto).= 10 Escalado rotativo.
PP103 FAGOR ModuleValue
PP104 FAGOR PositionKvGain
MCPi-88/112 Regulación AC Brushless digital - Ref.0910
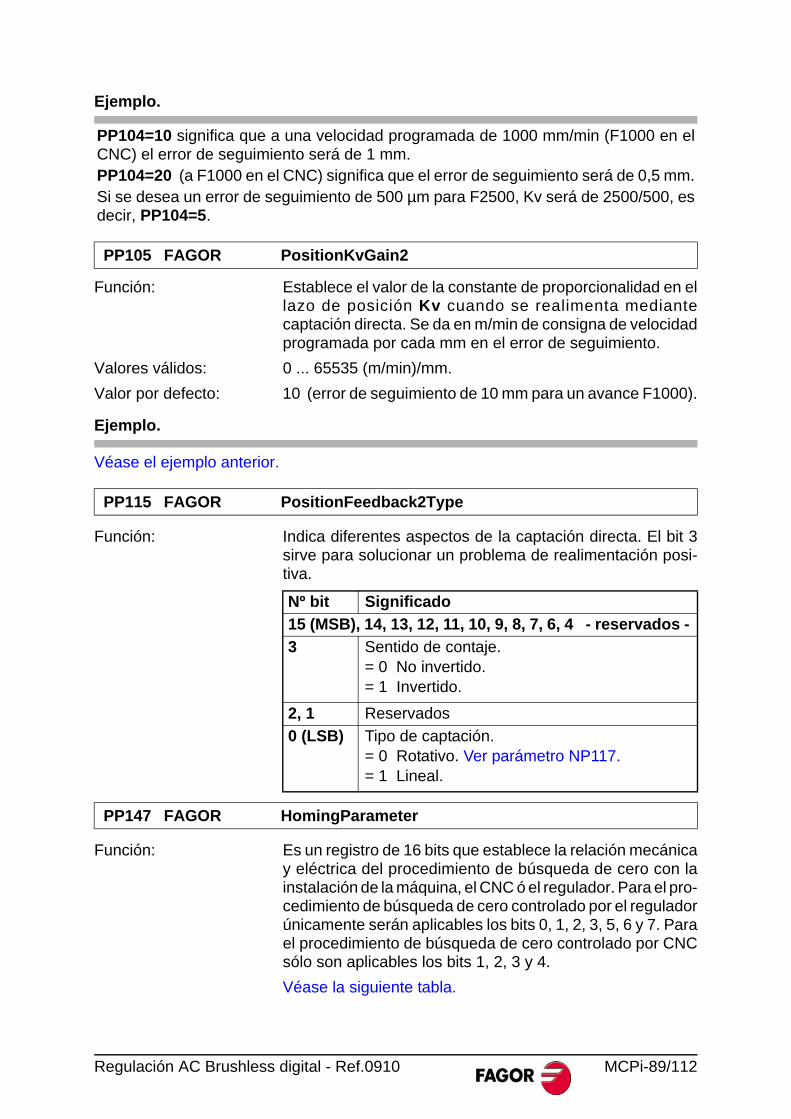
Función: Establece el valor de la constante de proporcionalidad en ellazo de posición Kv cuando se realimenta mediantecaptación directa. Se da en m/min de consigna de velocidadprogramada por cada mm en el error de seguimiento.
Valores válidos: 0 ... 65535 (m/min)/mm.
Valor por defecto: 10 (error de seguimiento de 10 mm para un avance F1000).
Función: Indica diferentes aspectos de la captación directa. El bit 3sirve para solucionar un problema de realimentación posi-tiva.
Función: Es un registro de 16 bits que establece la relación mecánicay eléctrica del procedimiento de búsqueda de cero con lainstalación de la máquina, el CNC ó el regulador. Para el pro-cedimiento de búsqueda de cero controlado por el reguladorúnicamente serán aplicables los bits 0, 1, 2, 3, 5, 6 y 7. Parael procedimiento de búsqueda de cero controlado por CNCsólo son aplicables los bits 1, 2, 3 y 4.
Véase la siguiente tabla.
Ejemplo.
PP104=10 significa que a una velocidad programada de 1000 mm/min (F1000 en elCNC) el error de seguimiento será de 1 mm.PP104=20 (a F1000 en el CNC) significa que el error de seguimiento será de 0,5 mm.Si se desea un error de seguimiento de 500 µm para F2500, Kv será de 2500/500, esdecir, PP104=5.
PP105 FAGOR PositionKvGain2
Ejemplo.
Véase el ejemplo anterior.
PP115 FAGOR PositionFeedback2Type
Nº bit Significado
15 (MSB), 14, 13, 12, 11, 10, 9, 8, 7, 6, 4 - reservados -
3 Sentido de contaje.= 0 No invertido.= 1 Invertido.
2, 1 Reservados
0 (LSB) Tipo de captación.= 0 Rotativo. Ver parámetro NP117. = 1 Lineal.
PP147 FAGOR HomingParameter
Regulación AC Brushless digital - Ref.0910 MCPi-89/112

Función: Establece el rango permitido para el error de seguimiento. Siéste excede el valor dado por PP159, el regulador comunicael E156 (error de seguimiento excesivo). Si este parámetroestá a 0 no habrá vigilancia en el error de seguimiento. Es importante que adquiera un valor distinto de cero para evi-tar que se lancen los ejes incontroladamente. En el CNC tam-bién se vigila el máximo error de seguimiento permitidoindicado en su parámetro correspondiente en las tablas deparámetros de cada eje en el CNC.
Valores válidos: 0 ... 214748 mm en movimientos lineales
0 ... 214748 grados en movimientos rotativos
Si PP159=0 no habrá vigilancia en el error de seguimiento.
Valor por defecto: 3 mm (en movimientos lineales).
3° (en movimientos rotativos).
Función: Define el grado en el que se aplica el feedforward develocidad. Es similar al parámetro FFGAIN (P25) de los ejesdel CNC 8055/55i. Indica el % de consigna de velocidad quese anticipa al movimiento, que no depende del error deseguimiento (lazo abierto).
Valores válidos: 0 ... 120 %
Valor por defecto: 0 % (no se aplica el efecto de feedforward).
Nº bit Significado
15 (MSB), 14, 13, 12, 11, 10, 9, 8 - reservados -
7 Posición tras el procedimiento controlado por el regulador. (reservado).
6 Evaluación de la marca de I0. (reservado)= 0 El I0 del captador del motor es evaluado. (por defecto).= 1 El I0 del captador del motor no es evaluado.
5 Evaluación del Home-Switch= 0 El Home-Switch es evaluado. (por defecto).= 1 El Home-Switch no es evaluado.
4 Interpretación en el regulador. (reservado).
3 Captación empleada= 0 Captación motor. (por defecto).= 1 Captación directa.
2 Conexión del Home-Switch. (reservado).
1 Lógica de la señal eléctrica del Home-Switch (notación H-S).= 0 La pulsación del H-S lleva un 1 a la entrada del PLC. Lógica + (por defecto).= 1 La pulsación del H-S lleva un 0 a la entrada del PLC.
0 (LSB) Dirección del movimiento.= 0 Positivo. El eje del motor gira en sentido horario. (por defecto).= 1 Negativo. El eje del motor gira en sentido antihorario.
PP159 FAGOR MonitoringWindow
PP216 FAGOR VelocityFeedForwardPercentage
MCPi-90/112 Regulación AC Brushless digital - Ref.0910
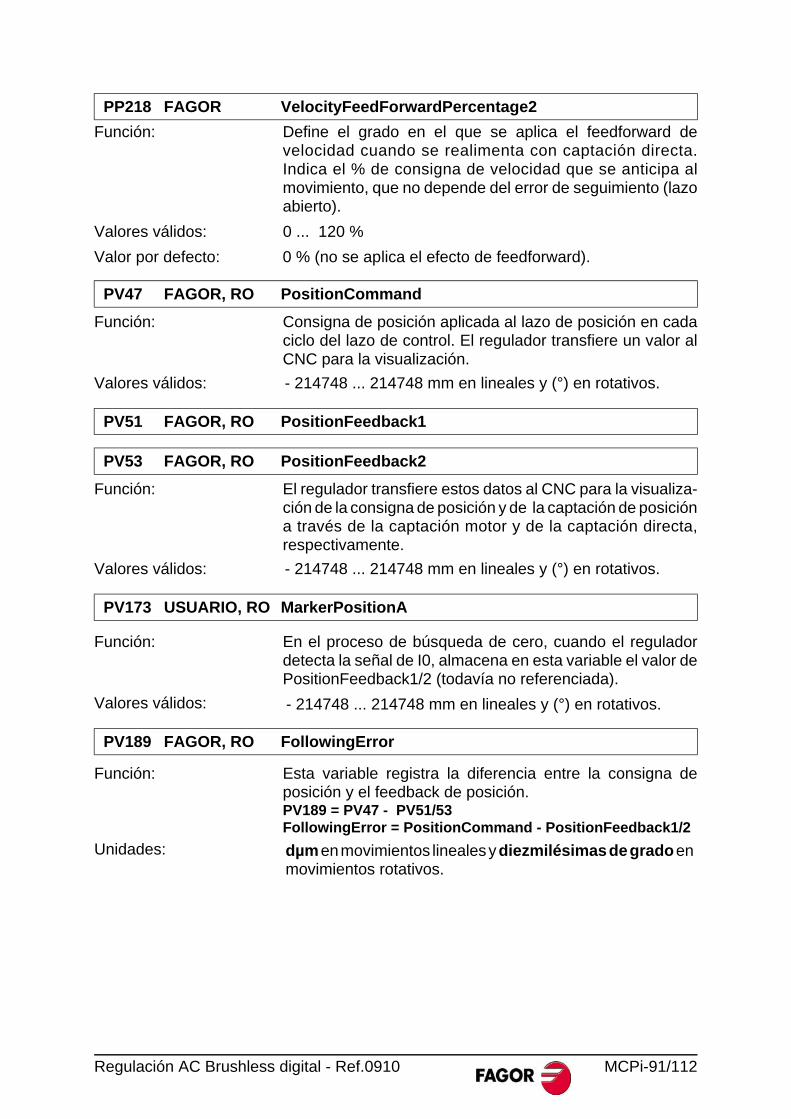
Función: Define el grado en el que se aplica el feedforward develocidad cuando se realimenta con captación directa.Indica el % de consigna de velocidad que se anticipa almovimiento, que no depende del error de seguimiento (lazoabierto).
Valores válidos: 0 ... 120 %
Valor por defecto: 0 % (no se aplica el efecto de feedforward).
Función: Consigna de posición aplicada al lazo de posición en cadaciclo del lazo de control. El regulador transfiere un valor alCNC para la visualización.
Función: El regulador transfiere estos datos al CNC para la visualiza-ción de la consigna de posición y de la captación de posicióna través de la captación motor y de la captación directa,respectivamente.
Función: En el proceso de búsqueda de cero, cuando el reguladordetecta la señal de I0, almacena en esta variable el valor dePositionFeedback1/2 (todavía no referenciada).
Función: Esta variable registra la diferencia entre la consigna deposición y el feedback de posición. PV189 = PV47 - PV51/53FollowingError = PositionCommand - PositionFeedback1/2
PP218 FAGOR VelocityFeedForwardPercentage2
PV47 FAGOR, RO PositionCommand
Valores válidos: - 214748 ... 214748 mm en lineales y (°) en rotativos.
PV51 FAGOR, RO PositionFeedback1
PV53 FAGOR, RO PositionFeedback2
Valores válidos: - 214748 ... 214748 mm en lineales y (°) en rotativos.
PV173 USUARIO, RO MarkerPositionA
Valores válidos: - 214748 ... 214748 mm en lineales y (°) en rotativos.
PV189 FAGOR, RO FollowingError
Unidades: dµm en movimientos lineales y diezmilésimas de grado en movimientos rotativos.
Regulación AC Brushless digital - Ref.0910 MCPi-91/112
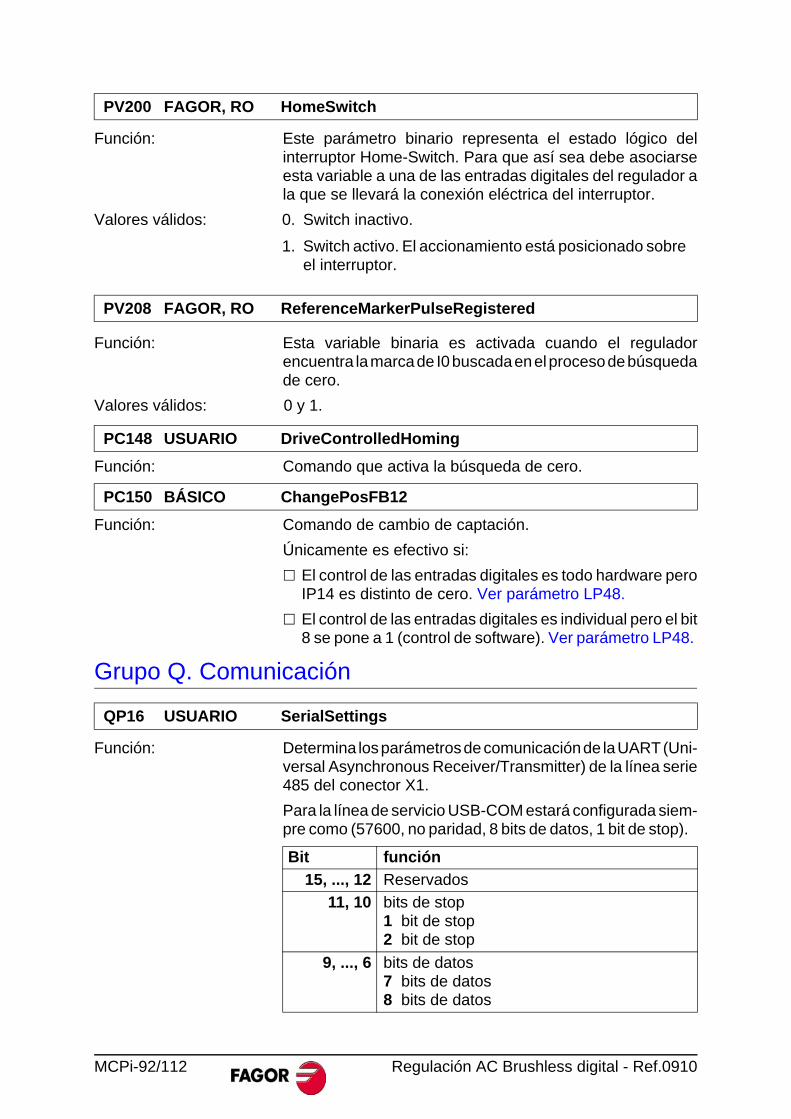
Función: Este parámetro binario representa el estado lógico delinterruptor Home-Switch. Para que así sea debe asociarseesta variable a una de las entradas digitales del regulador ala que se llevará la conexión eléctrica del interruptor.
Función: Esta variable binaria es activada cuando el reguladorencuentra la marca de I0 buscada en el proceso de búsquedade cero.
Función: Comando que activa la búsqueda de cero.
Función: Comando de cambio de captación.
Únicamente es efectivo si:
El control de las entradas digitales es todo hardware peroIP14 es distinto de cero. Ver parámetro LP48.
El control de las entradas digitales es individual pero el bit8 se pone a 1 (control de software). Ver parámetro LP48.
Grupo Q. Comunicación
Función: Determina los parámetros de comunicación de la UART (Uni-versal Asynchronous Receiver/Transmitter) de la línea serie485 del conector X1.
Para la línea de servicio USB-COM estará configurada siem-pre como (57600, no paridad, 8 bits de datos, 1 bit de stop).
PV200 FAGOR, RO HomeSwitch
Valores válidos: 0. Switch inactivo.
1. Switch activo. El accionamiento está posicionado sobreel interruptor.
PV208 FAGOR, RO ReferenceMarkerPulseRegistered
Valores válidos: 0 y 1.
PC148 USUARIO DriveControlledHoming
PC150 BÁSICO ChangePosFB12
QP16 USUARIO SerialSettings
Bit función
15, ..., 12 Reservados
11, 10 bits de stop1 bit de stop2 bit de stop
9, ..., 6 bits de datos7 bits de datos8 bits de datos
MCPi-92/112 Regulación AC Brushless digital - Ref.0910
Valor por defecto: 1540 (9600, no paridad, 8 bits de datos, 1 bit de stop).
Función: Variable donde se reflejan los parámetros que son reajus-tados por el regulador cuando éste da el error E.502(parámetros incompatibles). Los parámetros se listan por suidentificador de bus (el WinDDSSetup muestra los nombresde los parámetros directamente).
Valores válidos: Cualquier identificador de bus de los parámetros.
Valor por defecto: 0.
Función: Esta variable contiene el número de nodo asignado alregulador para establecer comunicación.
Valores válidos: 0 ... 127.
Valor por defecto: 0.
Grupo S. Velocidad
Función: Valor de la acción proporcional / integral del PI de velocidad.
Valores válidos: SP1: 0 ... 999.9 mArms/(rev/min).
SP2: 0,1 ... 999,9 ms.
5, 4 bits de paridad0 no hay paridad1 paridad par2 paridad impar
3, ..., 0 velocidad de comunicación (en baudios)0 2400 Bd 5 19200 Bd1 3600 Bd 6 38400 Bd2 4800 Bd 7 57600 Bd3 7200 Bd 8 115200 Bd4 9600 Bd
QV22 FAGOR, RO IDNListOfInvalidOperationDataForCP3
QV96 USUARIO, RW SlaveArrangement
Valor Protocolo ModBus
0 Nº de nodo 0 (no utilizado habitualmente)
1, ..., 127 Nº de nodo asignado al equipo en una comunicación tipo bus.
SP1 BÁSICO VelocityProportionalGain
SP2 BÁSICO VelocityIntegralGain
Regulación AC Brushless digital - Ref.0910 MCPi-93/112
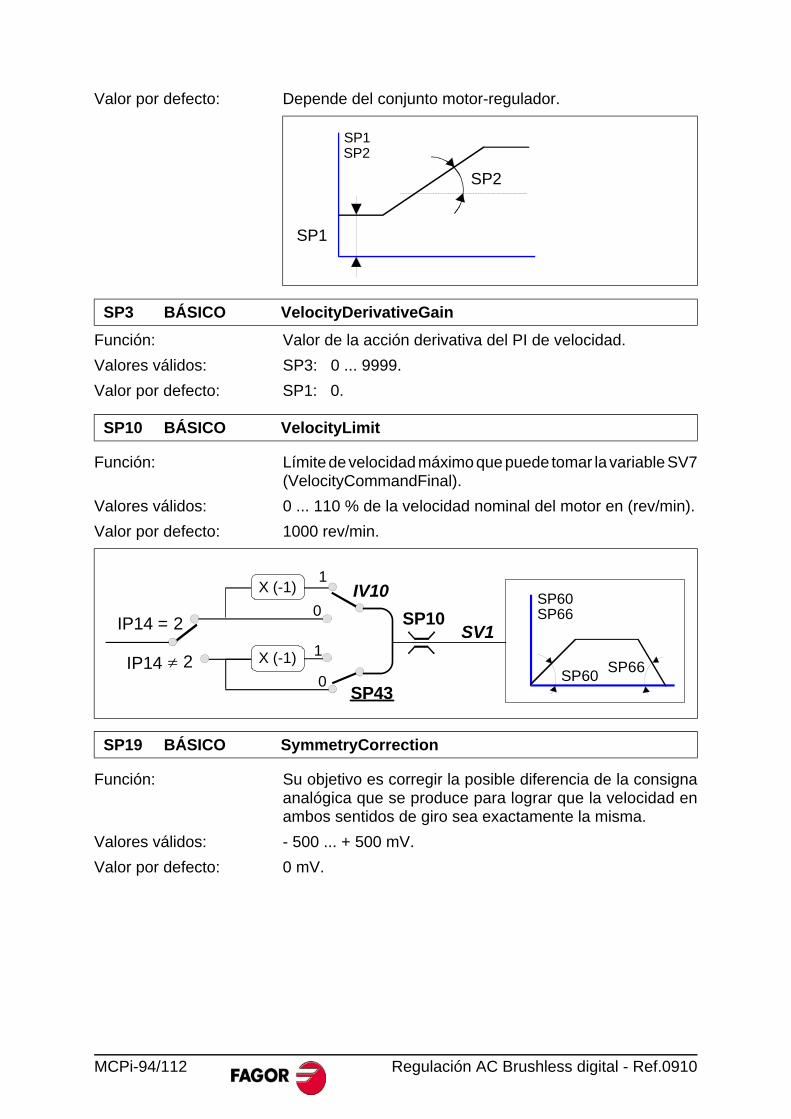
Valor por defecto: Depende del conjunto motor-regulador.
Función: Valor de la acción derivativa del PI de velocidad.
Valores válidos: SP3: 0 ... 9999.
Valor por defecto: SP1: 0.
Función: Límite de velocidad máximo que puede tomar la variable SV7(VelocityCommandFinal).
Valores válidos: 0 ... 110 % de la velocidad nominal del motor en (rev/min).
Valor por defecto: 1000 rev/min.
Función: Su objetivo es corregir la posible diferencia de la consignaanalógica que se produce para lograr que la velocidad enambos sentidos de giro sea exactamente la misma.
Valores válidos: - 500 ... + 500 mV.
Valor por defecto: 0 mV.
SP3 BÁSICO VelocityDerivativeGain
SP10 BÁSICO VelocityLimit
SP19 BÁSICO SymmetryCorrection
SP1SP2
SP1
SP2
SP60SP66SP10
SV1
SP66
0
X (-1)
1X (-1)SP60
IV101
0SP43
IP14 = 2
IP14 2
MCPi-94/112 Regulación AC Brushless digital - Ref.0910
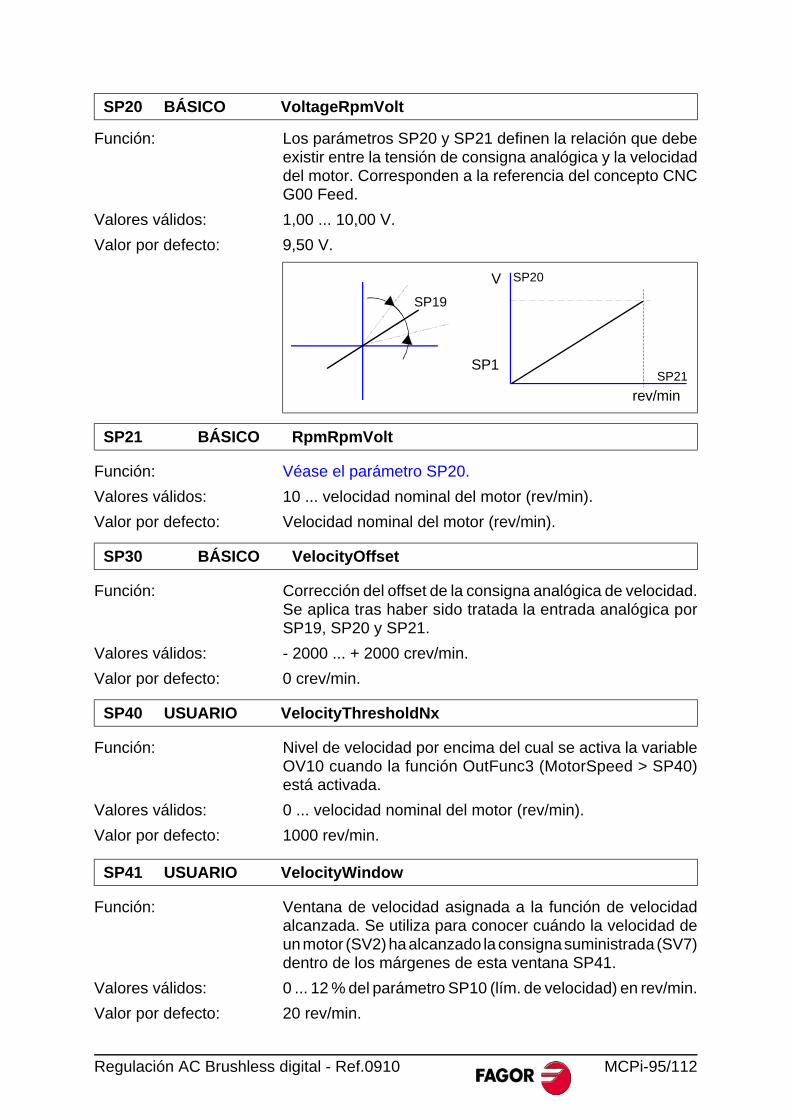
Función: Los parámetros SP20 y SP21 definen la relación que debeexistir entre la tensión de consigna analógica y la velocidaddel motor. Corresponden a la referencia del concepto CNCG00 Feed.
Valores válidos: 1,00 ... 10,00 V.
Valor por defecto: 9,50 V.
Función: Véase el parámetro SP20.
Valores válidos: 10 ... velocidad nominal del motor (rev/min).
Valor por defecto: Velocidad nominal del motor (rev/min).
Función: Corrección del offset de la consigna analógica de velocidad.Se aplica tras haber sido tratada la entrada analógica porSP19, SP20 y SP21.
Valores válidos: - 2000 ... + 2000 crev/min.
Valor por defecto: 0 crev/min.
Función: Nivel de velocidad por encima del cual se activa la variableOV10 cuando la función OutFunc3 (MotorSpeed > SP40)está activada.
Valores válidos: 0 ... velocidad nominal del motor (rev/min).
Valor por defecto: 1000 rev/min.
Función: Ventana de velocidad asignada a la función de velocidadalcanzada. Se utiliza para conocer cuándo la velocidad deun motor (SV2) ha alcanzado la consigna suministrada (SV7)dentro de los márgenes de esta ventana SP41.
Valores válidos: 0 ... 12 % del parámetro SP10 (lím. de velocidad) en rev/min.
Valor por defecto: 20 rev/min.
SP20 BÁSICO VoltageRpmVolt
SP21 BÁSICO RpmRpmVolt
SP30 BÁSICO VelocityOffset
SP40 USUARIO VelocityThresholdNx
SP41 USUARIO VelocityWindow
SP20
SP1
V
SP21
rev/min
SP19
Regulación AC Brushless digital - Ref.0910 MCPi-95/112
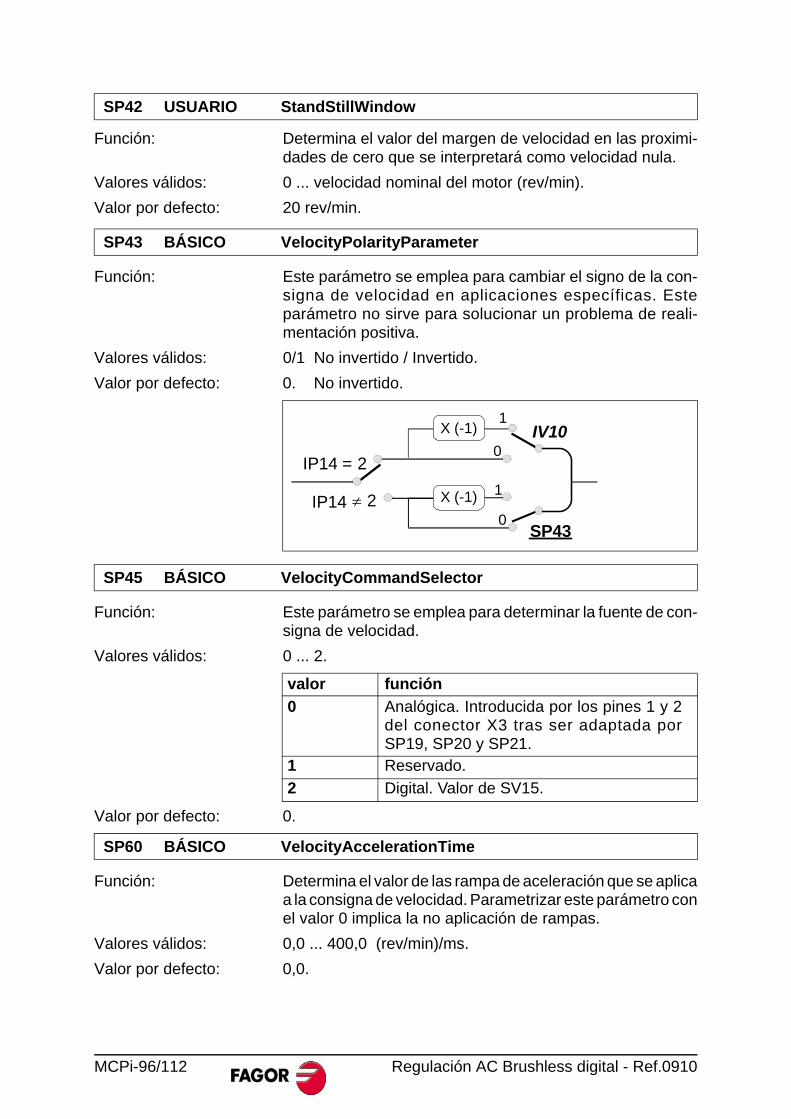
Función: Determina el valor del margen de velocidad en las proximi-dades de cero que se interpretará como velocidad nula.
Valores válidos: 0 ... velocidad nominal del motor (rev/min).
Valor por defecto: 20 rev/min.
Función: Este parámetro se emplea para cambiar el signo de la con-signa de velocidad en aplicaciones específicas. Esteparámetro no sirve para solucionar un problema de reali-mentación positiva.
Valores válidos: 0/1 No invertido / Invertido.
Valor por defecto: 0. No invertido.
Función: Este parámetro se emplea para determinar la fuente de con-signa de velocidad.
Valores válidos: 0 ... 2.
Valor por defecto: 0.
Función: Determina el valor de las rampa de aceleración que se aplicaa la consigna de velocidad. Parametrizar este parámetro conel valor 0 implica la no aplicación de rampas.
Valores válidos: 0,0 ... 400,0 (rev/min)/ms.
Valor por defecto: 0,0.
SP42 USUARIO StandStillWindow
SP43 BÁSICO VelocityPolarityParameter
SP45 BÁSICO VelocityCommandSelector
valor función
0 Analógica. Introducida por los pines 1 y 2del conector X3 tras ser adaptada porSP19, SP20 y SP21.
1 Reservado.
2 Digital. Valor de SV15.
SP60 BÁSICO VelocityAccelerationTime
0
X (-1)
1X (-1)
IV101
0SP43
IP14 = 2
IP14 2
MCPi-96/112 Regulación AC Brushless digital - Ref.0910
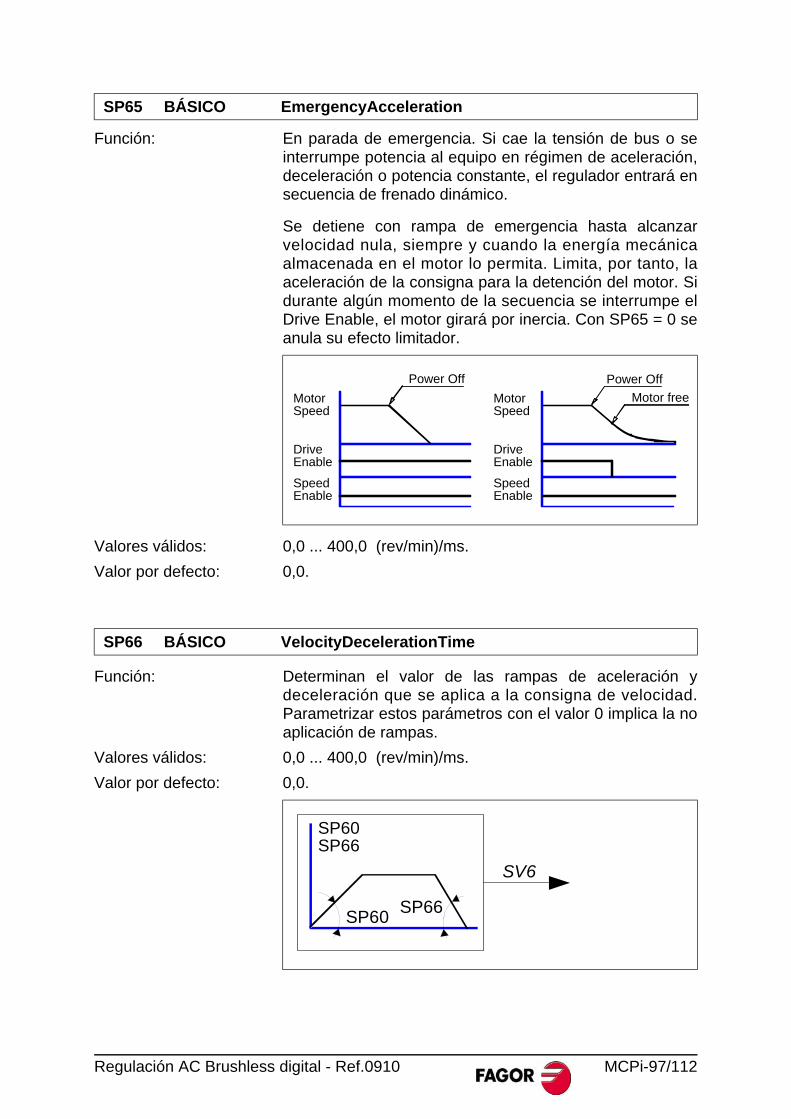
Función: En parada de emergencia. Si cae la tensión de bus o seinterrumpe potencia al equipo en régimen de aceleración,deceleración o potencia constante, el regulador entrará ensecuencia de frenado dinámico.
Se detiene con rampa de emergencia hasta alcanzarvelocidad nula, siempre y cuando la energía mecánicaalmacenada en el motor lo permita. Limita, por tanto, laaceleración de la consigna para la detención del motor. Sidurante algún momento de la secuencia se interrumpe elDrive Enable, el motor girará por inercia. Con SP65 = 0 seanula su efecto limitador.
Valores válidos: 0,0 ... 400,0 (rev/min)/ms.
Valor por defecto: 0,0.
Función: Determinan el valor de las rampas de aceleración ydeceleración que se aplica a la consigna de velocidad.Parametrizar estos parámetros con el valor 0 implica la noaplicación de rampas.
Valores válidos: 0,0 ... 400,0 (rev/min)/ms.
Valor por defecto: 0,0.
SP65 BÁSICO EmergencyAcceleration
SP66 BÁSICO VelocityDecelerationTime
Motor free
Power Off
Drive Enable
Power Off
Speed Enable
Motor Speed
Drive Enable
Speed Enable
Motor Speed
SP60SP66
SP66SP60
SV6
Regulación AC Brushless digital - Ref.0910 MCPi-97/112
Función: Consigna de velocidad después del selector SP45.
Valores válidos: - 6000 ... 6000 rev/min.
Valor por defecto: 0.
Función: Realimentación de velocidad.
Valores válidos: - 9999 ... + 9999 rev/min.
Función: Consigna de velocidad después de la aplicación de limita-ciones, rampas, ...
Valores válidos: - 9999 ... + 9999 rev/min.
Función: Consigna final de velocidad que se aplica al lazo.
Valores válidos: - 9999 ... + 9999 rev/min.
Función: Consigna digital de velocidad.
Valores válidos: - 6000 ... 6000 rev/min.
Valor por defecto: 0.
Grupo T. Par y potencia
Función: Parámetro que determina el umbral de par a partir del cualse activa OV10 cuando la función OutFunc2 (TorqueLimitModeZeroSearch) está activada.
Unidades: Fracción del valor nominal del par del motor.
Valores válidos: 0 ... 100 %.
Valor por defecto: 5 %.
SV1 BÁSICO, RW VelocityCommand
SV2 BÁSICO, RO VelocityFeedback
SV6 BÁSICO, RO VelocityCommandAfterFilters
SV7 BÁSICO, RO VelocityCommandFinal
SV15 USUARIO, RW DigitalVelocityCommand
TP1 USUARIO TorqueThresholdTx
MCPi-98/112 Regulación AC Brushless digital - Ref.0910
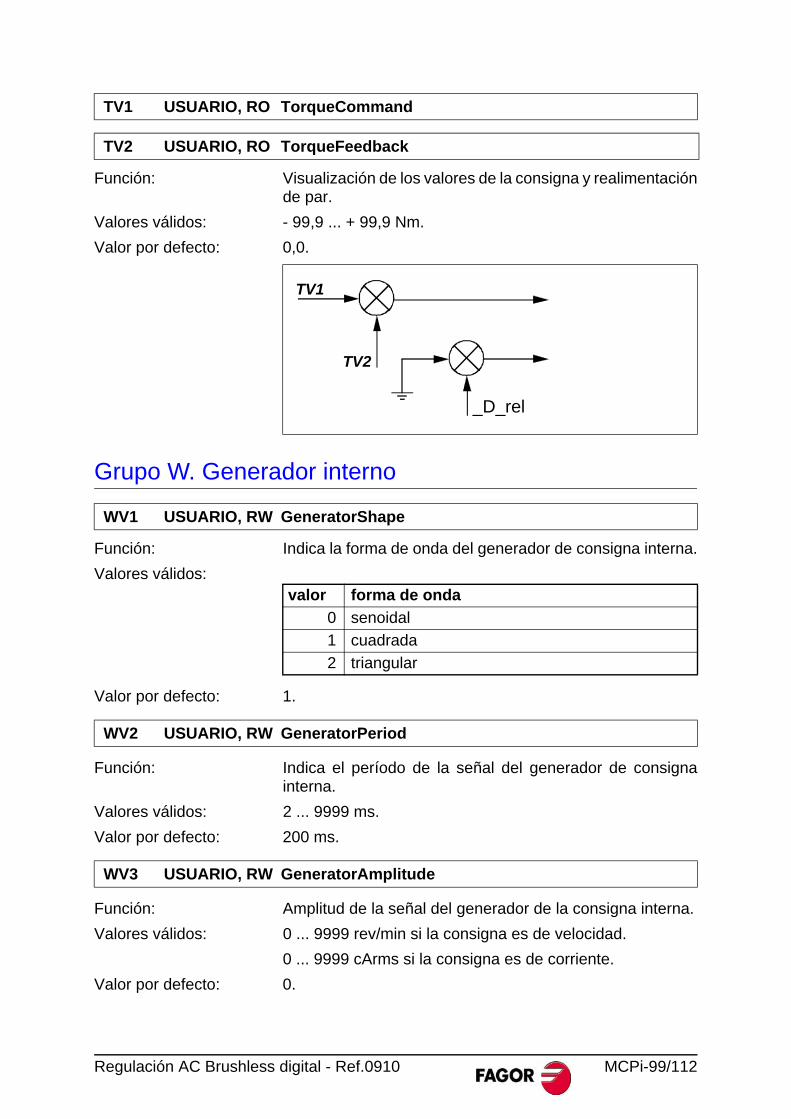
Función: Visualización de los valores de la consigna y realimentaciónde par.
Valores válidos: - 99,9 ... + 99,9 Nm.
Valor por defecto: 0,0.
Grupo W. Generador interno
Función: Indica la forma de onda del generador de consigna interna.
Valores válidos:
Valor por defecto: 1.
Función: Indica el período de la señal del generador de consignainterna.
Valores válidos: 2 ... 9999 ms.
Valor por defecto: 200 ms.
Función: Amplitud de la señal del generador de la consigna interna.
Valores válidos: 0 ... 9999 rev/min si la consigna es de velocidad.
0 ... 9999 cArms si la consigna es de corriente.
Valor por defecto: 0.
TV1 USUARIO, RO TorqueCommand
TV2 USUARIO, RO TorqueFeedback
WV1 USUARIO, RW GeneratorShape
valor forma de onda
0 senoidal
1 cuadrada
2 triangular
WV2 USUARIO, RW GeneratorPeriod
WV3 USUARIO, RW GeneratorAmplitude
TV1
_D_rel
TV2
Regulación AC Brushless digital - Ref.0910 MCPi-99/112
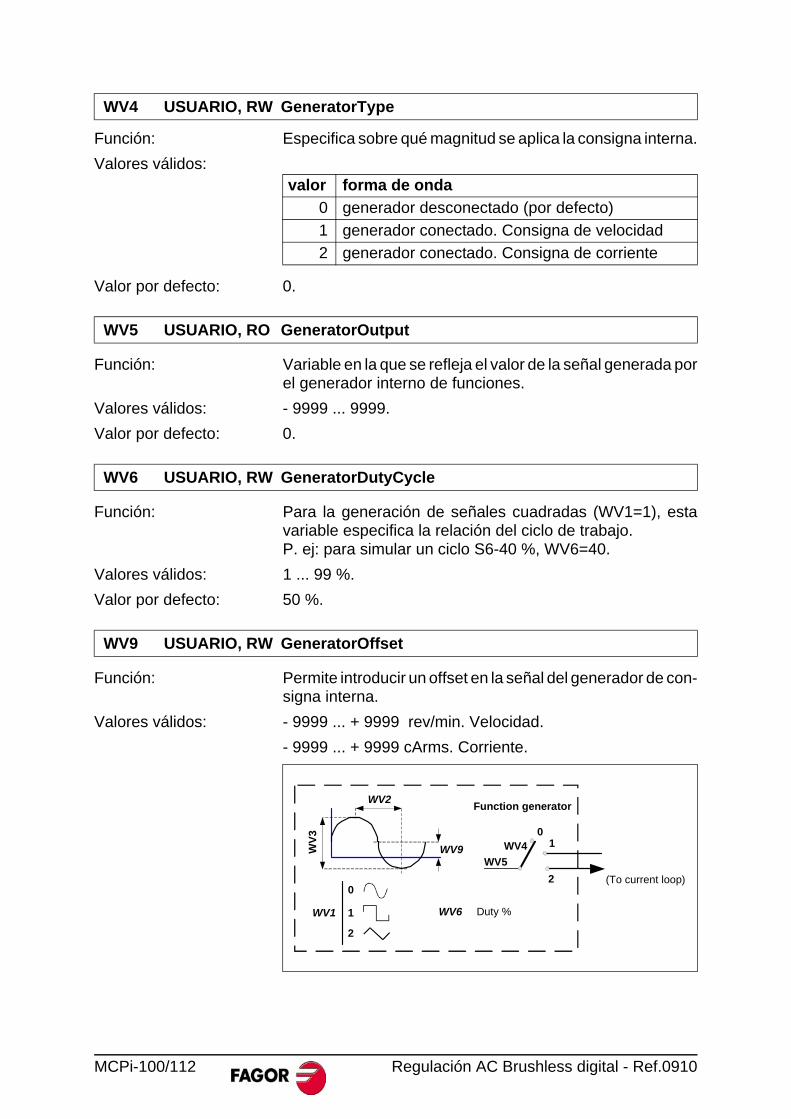
Función: Especifica sobre qué magnitud se aplica la consigna interna.
Valores válidos:
Valor por defecto: 0.
Función: Variable en la que se refleja el valor de la señal generada porel generador interno de funciones.
Valores válidos: - 9999 ... 9999.
Valor por defecto: 0.
Función: Para la generación de señales cuadradas (WV1=1), estavariable especifica la relación del ciclo de trabajo. P. ej: para simular un ciclo S6-40 %, WV6=40.
Valores válidos: 1 ... 99 %.
Valor por defecto: 50 %.
Función: Permite introducir un offset en la señal del generador de con-signa interna.
Valores válidos: - 9999 ... + 9999 rev/min. Velocidad.
- 9999 ... + 9999 cArms. Corriente.
WV4 USUARIO, RW GeneratorType
valor forma de onda
0 generador desconectado (por defecto)
1 generador conectado. Consigna de velocidad
2 generador conectado. Consigna de corriente
WV5 USUARIO, RO GeneratorOutput
WV6 USUARIO, RW GeneratorDutyCycle
WV9 USUARIO, RW GeneratorOffset
WV6 Duty %WV1
0
1
2
WV9WV
3
WV2Function generator
01
2
WV5
WV4
(To current loop)
MCPi-100/112 Regulación AC Brushless digital - Ref.0910
REGISTROS DEL PLC DEDICADOSNOTACIÓN EMPLEADA
[REG] [Indice] donde:
REG: Carácter identificador de registro de PLC dedicado.
Índice: Nº identificador del registro.
Existen los siguientes registros:
Función: Contador del nº de piezas que se desean fabricar.
Valores válidos: 0 ... 65535 (nº de piezas).
Valor por defecto: 0.
Función: Contador del nº de piezas que se han fabricado hasta elmomento.
Valores válidos: 0 ... 65535. (nº de piezas).
Valor por defecto: 0.
Función: Registro que refleja el nº de bloque que se está ejecutando.
Valores válidos: 1 ... 127.
Valor por defecto: 1.
Función: Registro que refleja el nº de bloque a ejecutar tras ser acti-vada la entrada START.
Valores válidos: 1 ... 127.
Valor por defecto: 1.
REG1 USUARIO, RW PiecesCount
REG2 USUARIO, RW ActualPiecesCount
REG3 USUARIO, RW RunningBlock
REG4 USUARIO, RW PositionBlockIni
Adviértase que será posible acceder a cualquier registro o bloque deposicionamiento de la tabla mediante comunicación línea serie RS485 conprotocolo ModBus con cualquier dispositivo que realice la labor de MASTER(maestro), como p. ej. un Video terminal ESA.
i
Regulación AC Brushless digital - Ref.0910 MCPi-101/112
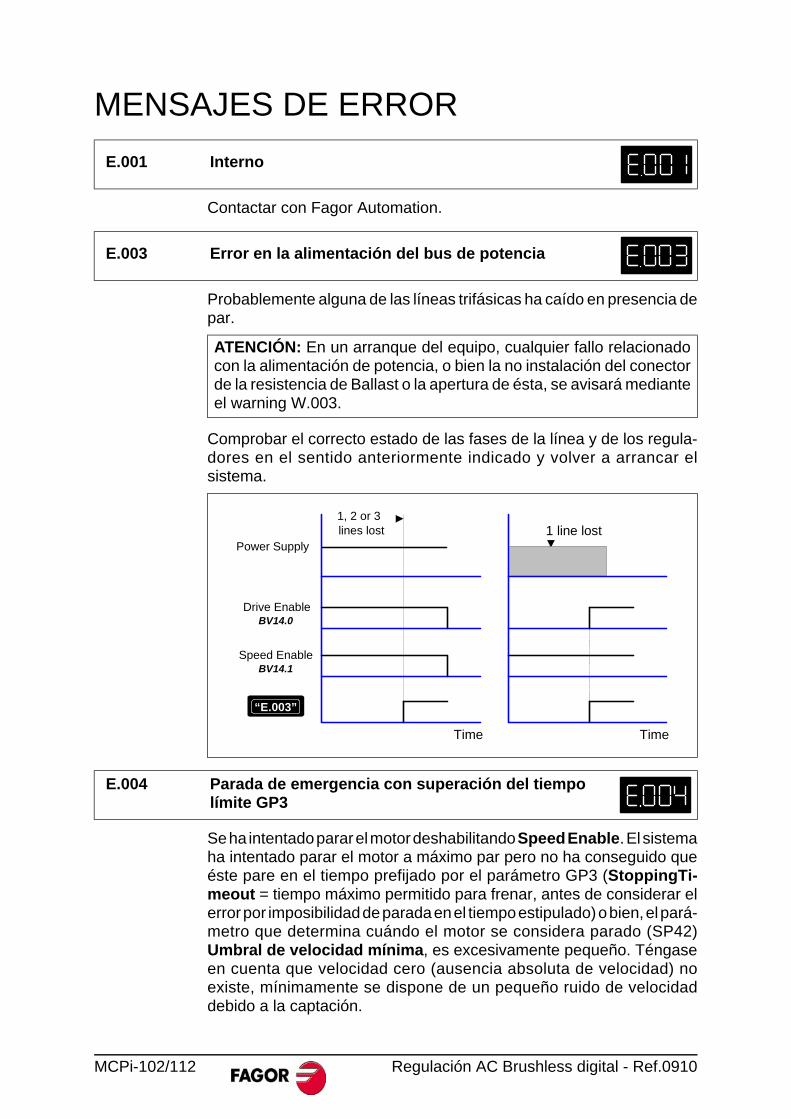
MENSAJES DE ERROR
Contactar con Fagor Automation.
Probablemente alguna de las líneas trifásicas ha caído en presencia depar.
Comprobar el correcto estado de las fases de la línea y de los regula-dores en el sentido anteriormente indicado y volver a arrancar elsistema.
Se ha intentado parar el motor deshabilitando Speed Enable. El sistemaha intentado parar el motor a máximo par pero no ha conseguido queéste pare en el tiempo prefijado por el parámetro GP3 (StoppingTi-meout = tiempo máximo permitido para frenar, antes de considerar elerror por imposibilidad de parada en el tiempo estipulado) o bien, el pará-metro que determina cuándo el motor se considera parado (SP42)Umbral de velocidad mínima, es excesivamente pequeño. Téngaseen cuenta que velocidad cero (ausencia absoluta de velocidad) noexiste, mínimamente se dispone de un pequeño ruido de velocidaddebido a la captación.
E.001 Interno
E.003 Error en la alimentación del bus de potencia
ATENCIÓN: En un arranque del equipo, cualquier fallo relacionadocon la alimentación de potencia, o bien la no instalación del conectorde la resistencia de Ballast o la apertura de ésta, se avisará medianteel warning W.003.
E.004 Parada de emergencia con superación del tiempo límite GP3
Time
“E.003”
Power Supply
BV14.0Drive Enable
Speed EnableBV14.1
1, 2 or 3 1 line lost
Time
lines lost
MCPi-102/112 Regulación AC Brushless digital - Ref.0910
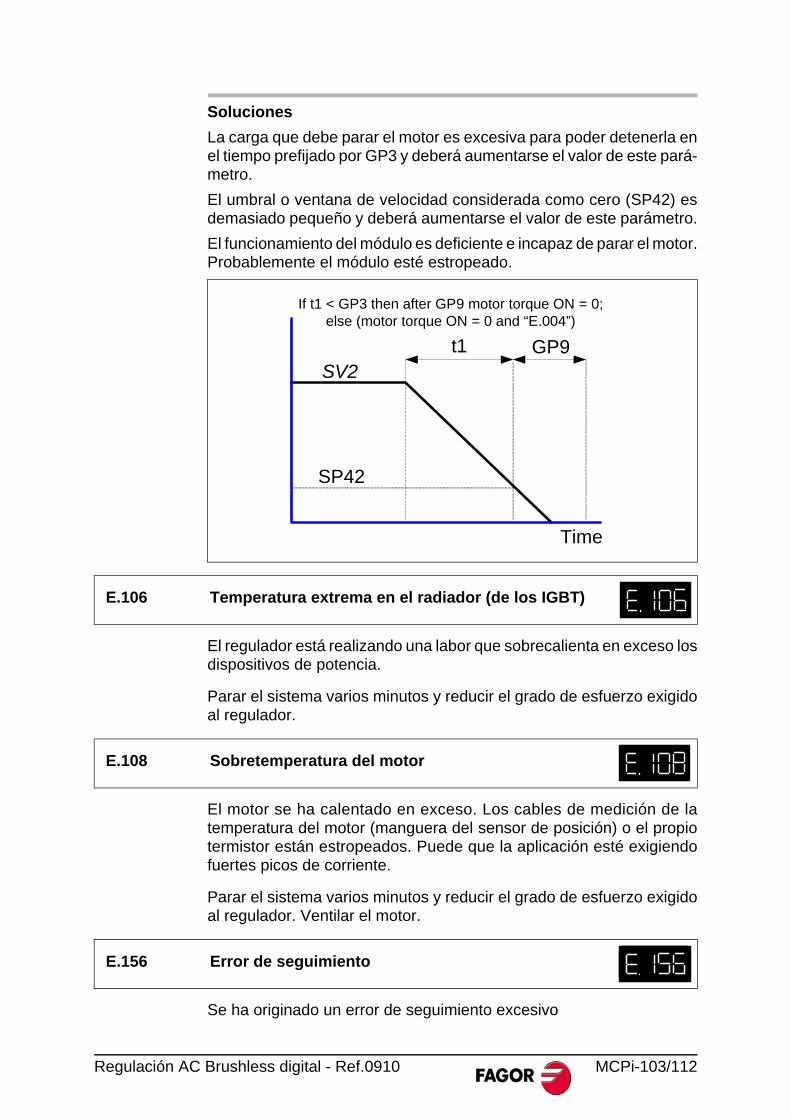
Soluciones
La carga que debe parar el motor es excesiva para poder detenerla enel tiempo prefijado por GP3 y deberá aumentarse el valor de este pará-metro.
El umbral o ventana de velocidad considerada como cero (SP42) esdemasiado pequeño y deberá aumentarse el valor de este parámetro.
El funcionamiento del módulo es deficiente e incapaz de parar el motor.Probablemente el módulo esté estropeado.
El regulador está realizando una labor que sobrecalienta en exceso losdispositivos de potencia.
Parar el sistema varios minutos y reducir el grado de esfuerzo exigidoal regulador.
El motor se ha calentado en exceso. Los cables de medición de latemperatura del motor (manguera del sensor de posición) o el propiotermistor están estropeados. Puede que la aplicación esté exigiendofuertes picos de corriente.
Parar el sistema varios minutos y reducir el grado de esfuerzo exigidoal regulador. Ventilar el motor.
Se ha originado un error de seguimiento excesivo
E.106 Temperatura extrema en el radiador (de los IGBT)
E.108 Sobretemperatura del motor
E.156 Error de seguimiento
If t1 < GP3 then after GP9 motor torque ON = 0;else (motor torque ON = 0 and “E.004”)
Time
SV2GP9t1
SP42
Regulación AC Brushless digital - Ref.0910 MCPi-103/112
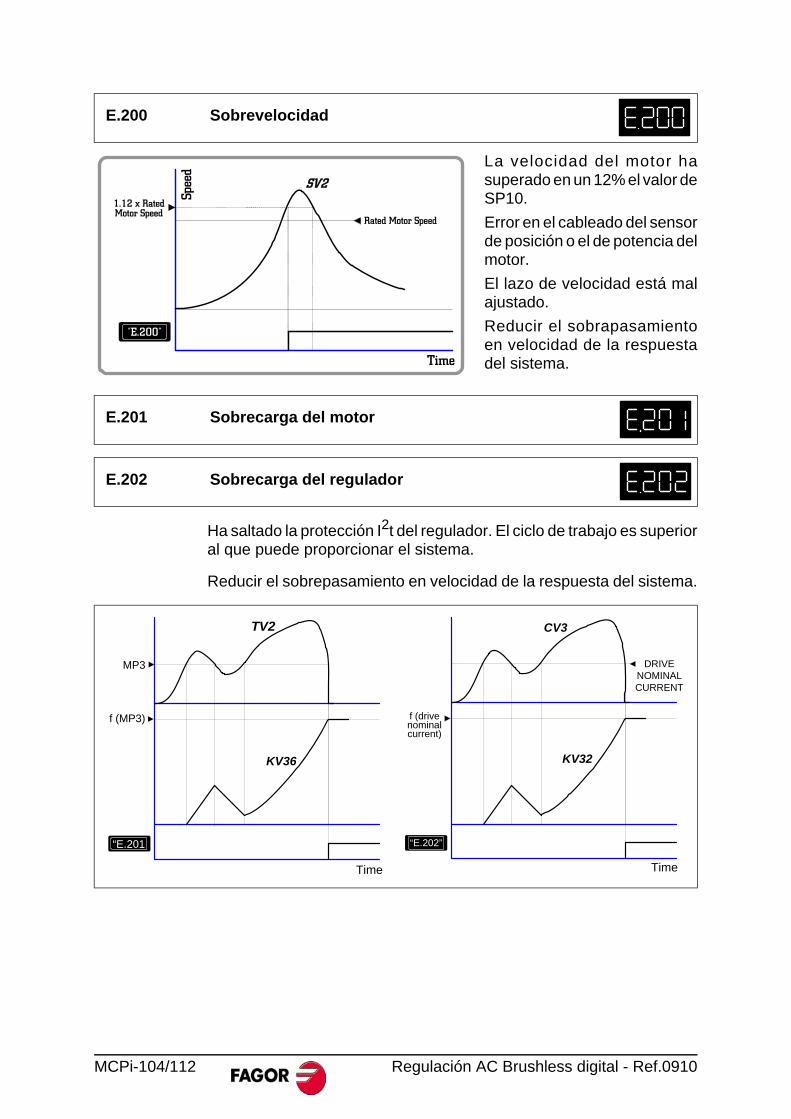
Ha saltado la protección I2t del regulador. El ciclo de trabajo es superioral que puede proporcionar el sistema.
Reducir el sobrepasamiento en velocidad de la respuesta del sistema.
E.200 Sobrevelocidad
La velocidad del motor hasuperado en un 12% el valor deSP10.
Error en el cableado del sensorde posición o el de potencia delmotor.
El lazo de velocidad está malajustado.
Reducir el sobrapasamientoen velocidad de la respuestadel sistema.
E.201 Sobrecarga del motor
E.202 Sobrecarga del regulador
Time
Rated Motor Speed
1.12 x RatedMotor Speed
Spe
edSV2
“E.200”
Time
CV3
“E.202”
DRIVE NOMINAL CURRENT
f (drive nominal current)
KV32
Time
TV2
“E.201”
MP3
f (MP3)
KV36
MCPi-104/112 Regulación AC Brushless digital - Ref.0910
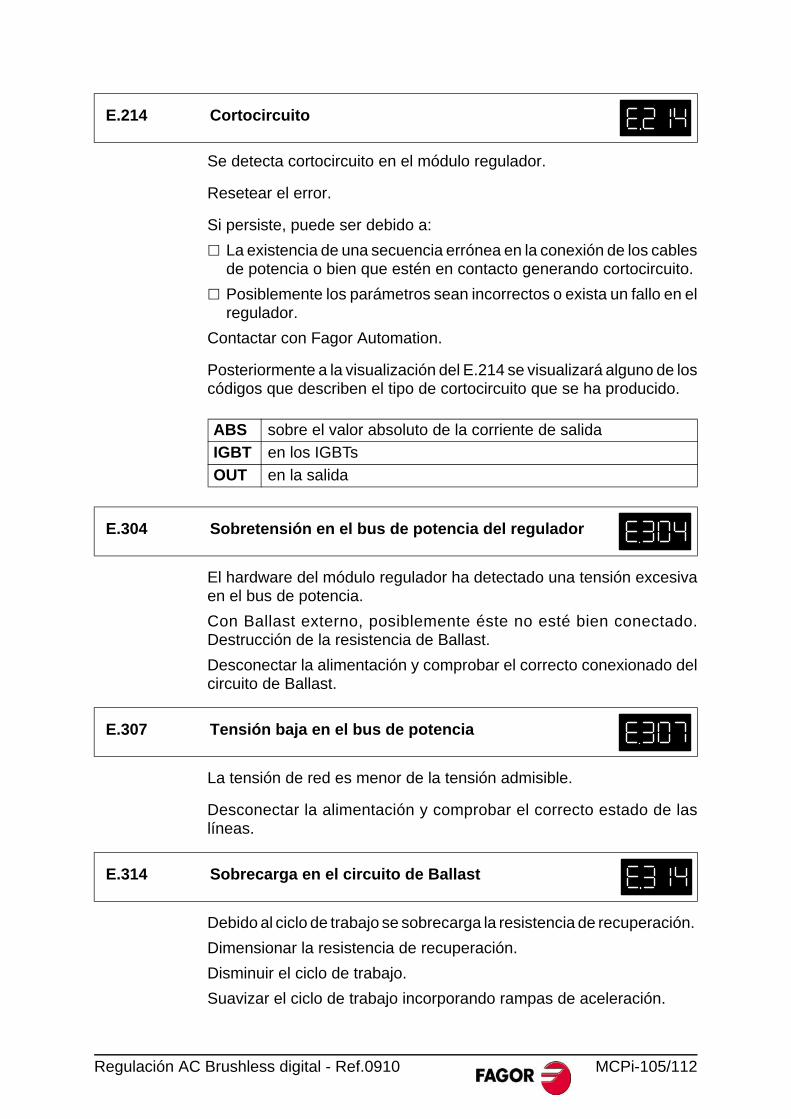
Se detecta cortocircuito en el módulo regulador.
Resetear el error.
Si persiste, puede ser debido a:
La existencia de una secuencia errónea en la conexión de los cablesde potencia o bien que estén en contacto generando cortocircuito.
Posiblemente los parámetros sean incorrectos o exista un fallo en elregulador.
Contactar con Fagor Automation.
Posteriormente a la visualización del E.214 se visualizará alguno de loscódigos que describen el tipo de cortocircuito que se ha producido.
El hardware del módulo regulador ha detectado una tensión excesivaen el bus de potencia.
Con Ballast externo, posiblemente éste no esté bien conectado.Destrucción de la resistencia de Ballast.
Desconectar la alimentación y comprobar el correcto conexionado delcircuito de Ballast.
La tensión de red es menor de la tensión admisible.
Desconectar la alimentación y comprobar el correcto estado de laslíneas.
Debido al ciclo de trabajo se sobrecarga la resistencia de recuperación.
Dimensionar la resistencia de recuperación.
Disminuir el ciclo de trabajo.
Suavizar el ciclo de trabajo incorporando rampas de aceleración.
E.214 Cortocircuito
ABS sobre el valor absoluto de la corriente de salida
IGBT en los IGBTs
OUT en la salida
E.304 Sobretensión en el bus de potencia del regulador
E.307 Tensión baja en el bus de potencia
E.314 Sobrecarga en el circuito de Ballast
Regulación AC Brushless digital - Ref.0910 MCPi-105/112
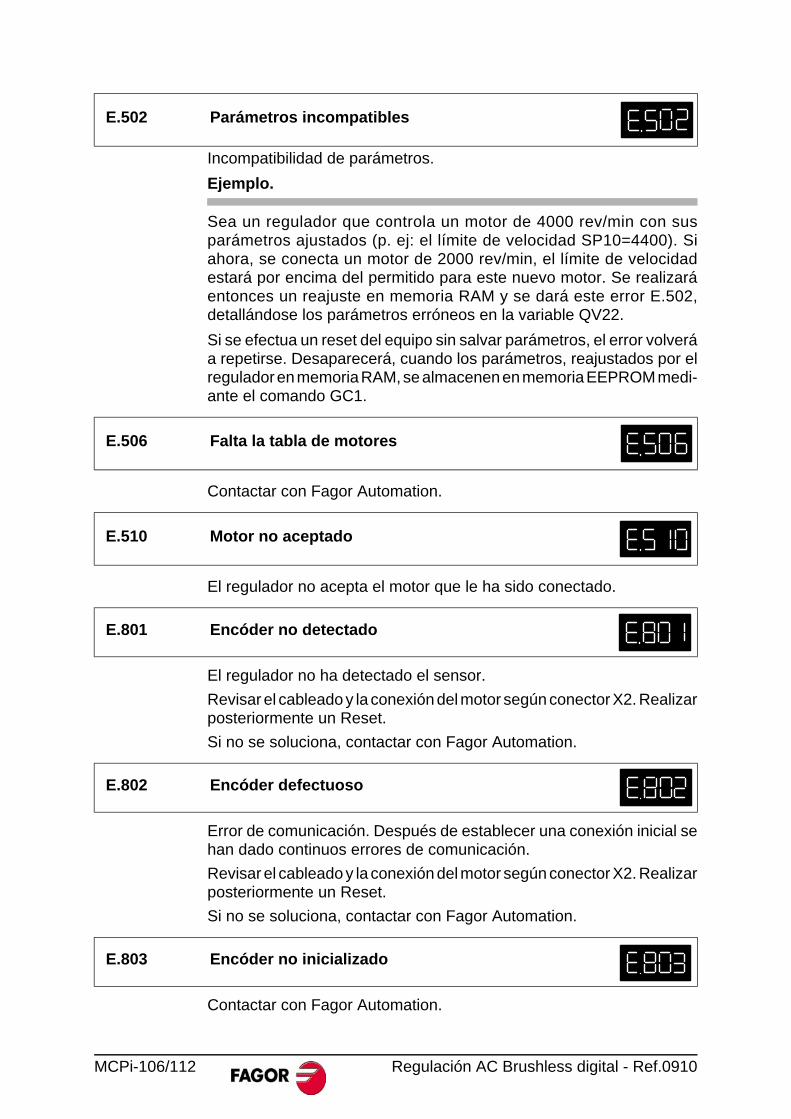
Incompatibilidad de parámetros.
Ejemplo.
Sea un regulador que controla un motor de 4000 rev/min con susparámetros ajustados (p. ej: el límite de velocidad SP10=4400). Siahora, se conecta un motor de 2000 rev/min, el límite de velocidadestará por encima del permitido para este nuevo motor. Se realizaráentonces un reajuste en memoria RAM y se dará este error E.502,detallándose los parámetros erróneos en la variable QV22.
Si se efectua un reset del equipo sin salvar parámetros, el error volveráa repetirse. Desaparecerá, cuando los parámetros, reajustados por elregulador en memoria RAM, se almacenen en memoria EEPROM medi-ante el comando GC1.
Contactar con Fagor Automation.
El regulador no acepta el motor que le ha sido conectado.
El regulador no ha detectado el sensor.
Revisar el cableado y la conexión del motor según conector X2. Realizarposteriormente un Reset.
Si no se soluciona, contactar con Fagor Automation.
Error de comunicación. Después de establecer una conexión inicial sehan dado continuos errores de comunicación.
Revisar el cableado y la conexión del motor según conector X2. Realizarposteriormente un Reset.
Si no se soluciona, contactar con Fagor Automation.
Contactar con Fagor Automation.
E.502 Parámetros incompatibles
E.506 Falta la tabla de motores
E.510 Motor no aceptado
E.801 Encóder no detectado
E.802 Encóder defectuoso
E.803 Encóder no inicializado
MCPi-106/112 Regulación AC Brushless digital - Ref.0910

AVISOSLos avisos (warnings) indican que el regulador se está aproximando aun límite de error. Así y antes de visualizar en el display del reguladoralguno de estos errores (E.201, E.202 y E.314) se generará un aviso(warning) mediante un parpadeo rápido (0,5 s) en el indicador BUSACTIVITY. Si este comportamiento continúa durante un tiempo superiora 5 s entonces será mostrado en el display uno de los erroresanteriormente mencionados.
Warning E.003. Aviso ante cualquier fallo que se origine durante el pro-ceso de alimentación de potencia del regulador. Aparecerá en lassiguientes circunstancias. Si se alimenta un equipo y:
No ha sido instalado el conector de la resistencia de Crowbar.
La resistencia de Crowbar está abierta.
Warning E.157. Bloque de inicio nulo o incorrecto. Este aviso se pro-duce cuando se activa la señal START para ejecutar un inicio de bloquey los interruptores (switches) están direccionados a un nº de bloquevacío. Se hace extensible a cualquier bloque.
Warning E.820. Estado de carga excesivamente bajo en la pila delencóder absoluto. Sustituir la pila.
Warning E.911. Bloque de movimiento absoluto a ejecutar sin haceruna búsqueda de I0, o bien, bloque de movimiento incremental con loslímites activados (por software).
Warning E.917. Aviso de aproximación (por software) al límite de posi-ción. Esta indicación señala que se está próximo a sobrepasar dicholímite.
ATENCIÓN: Si los límites no están activados (por software) aunqueno se haya realizado una búsqueda de I0, podrá ejecutarse el bloque.
Regulación AC Brushless digital - Ref.0910 MCPi-107/112
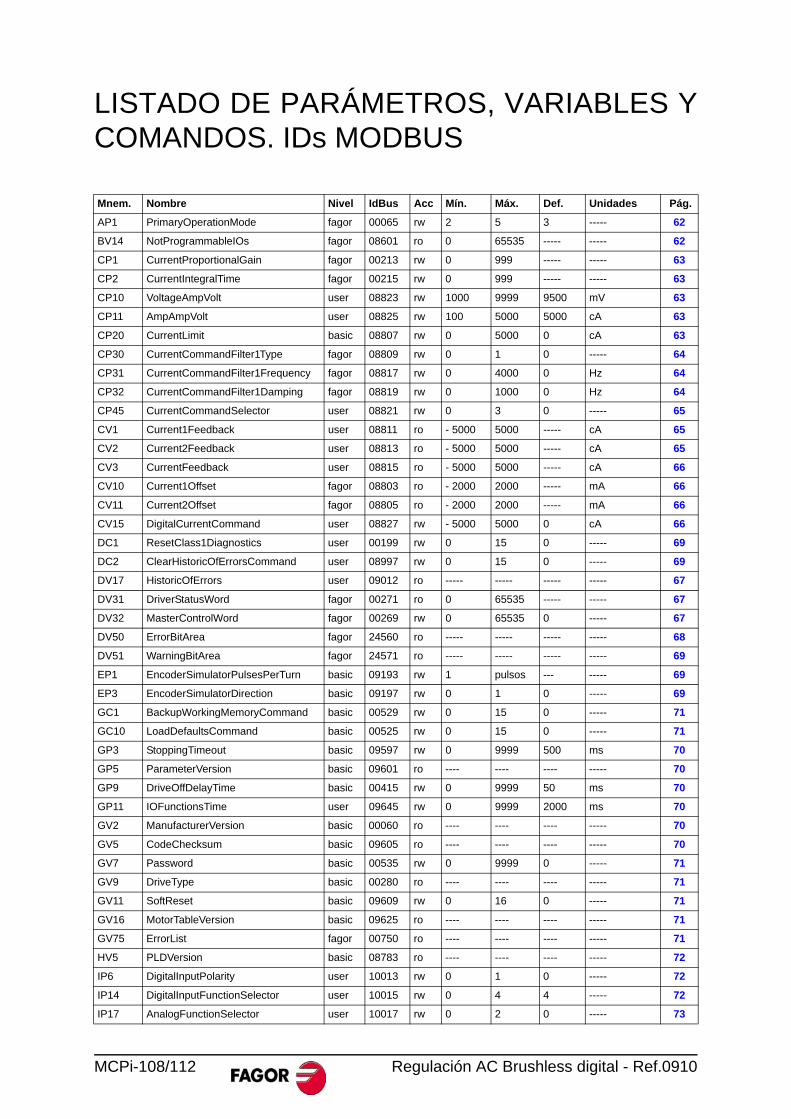
LISTADO DE PARÁMETROS, VARIABLES YCOMANDOS. IDs MODBUS
Mnem. Nombre Nivel IdBus Acc Mín. Máx. Def. Unidades Pág.
AP1 PrimaryOperationMode fagor 00065 rw 2 5 3 ----- 62
BV14 NotProgrammableIOs fagor 08601 ro 0 65535 ----- ----- 62
CP1 CurrentProportionalGain fagor 00213 rw 0 999 ----- ----- 63
CP2 CurrentIntegralTime fagor 00215 rw 0 999 ----- ----- 63
CP10 VoltageAmpVolt user 08823 rw 1000 9999 9500 mV 63
CP11 AmpAmpVolt user 08825 rw 100 5000 5000 cA 63
CP20 CurrentLimit basic 08807 rw 0 5000 0 cA 63
CP30 CurrentCommandFilter1Type fagor 08809 rw 0 1 0 ----- 64
CP31 CurrentCommandFilter1Frequency fagor 08817 rw 0 4000 0 Hz 64
CP32 CurrentCommandFilter1Damping fagor 08819 rw 0 1000 0 Hz 64
CP45 CurrentCommandSelector user 08821 rw 0 3 0 ----- 65
CV1 Current1Feedback user 08811 ro - 5000 5000 ----- cA 65
CV2 Current2Feedback user 08813 ro - 5000 5000 ----- cA 65
CV3 CurrentFeedback user 08815 ro - 5000 5000 ----- cA 66
CV10 Current1Offset fagor 08803 ro - 2000 2000 ----- mA 66
CV11 Current2Offset fagor 08805 ro - 2000 2000 ----- mA 66
CV15 DigitalCurrentCommand user 08827 rw - 5000 5000 0 cA 66
DC1 ResetClass1Diagnostics user 00199 rw 0 15 0 ----- 69
DC2 ClearHistoricOfErrorsCommand user 08997 rw 0 15 0 ----- 69
DV17 HistoricOfErrors user 09012 ro ----- ----- ----- ----- 67
DV31 DriverStatusWord fagor 00271 ro 0 65535 ----- ----- 67
DV32 MasterControlWord fagor 00269 rw 0 65535 0 ----- 67
DV50 ErrorBitArea fagor 24560 ro ----- ----- ----- ----- 68
DV51 WarningBitArea fagor 24571 ro ----- ----- ----- ----- 69
EP1 EncoderSimulatorPulsesPerTurn basic 09193 rw 1 pulsos --- ----- 69
EP3 EncoderSimulatorDirection basic 09197 rw 0 1 0 ----- 69
GC1 BackupWorkingMemoryCommand basic 00529 rw 0 15 0 ----- 71
GC10 LoadDefaultsCommand basic 00525 rw 0 15 0 ----- 71
GP3 StoppingTimeout basic 09597 rw 0 9999 500 ms 70
GP5 ParameterVersion basic 09601 ro ---- ---- ---- ----- 70
GP9 DriveOffDelayTime basic 00415 rw 0 9999 50 ms 70
GP11 IOFunctionsTime user 09645 rw 0 9999 2000 ms 70
GV2 ManufacturerVersion basic 00060 ro ---- ---- ---- ----- 70
GV5 CodeChecksum basic 09605 ro ---- ---- ---- ----- 70
GV7 Password basic 00535 rw 0 9999 0 ----- 71
GV9 DriveType basic 00280 ro ---- ---- ---- ----- 71
GV11 SoftReset basic 09609 rw 0 16 0 ----- 71
GV16 MotorTableVersion basic 09625 ro ---- ---- ---- ----- 71
GV75 ErrorList fagor 00750 ro ---- ---- ---- ----- 71
HV5 PLDVersion basic 08783 ro ---- ---- ---- ----- 72
IP6 DigitalInputPolarity user 10013 rw 0 1 0 ----- 72
IP14 DigitalInputFunctionSelector user 10015 rw 0 4 4 ----- 72
IP17 AnalogFunctionSelector user 10017 rw 0 2 0 ----- 73
MCPi-108/112 Regulación AC Brushless digital - Ref.0910
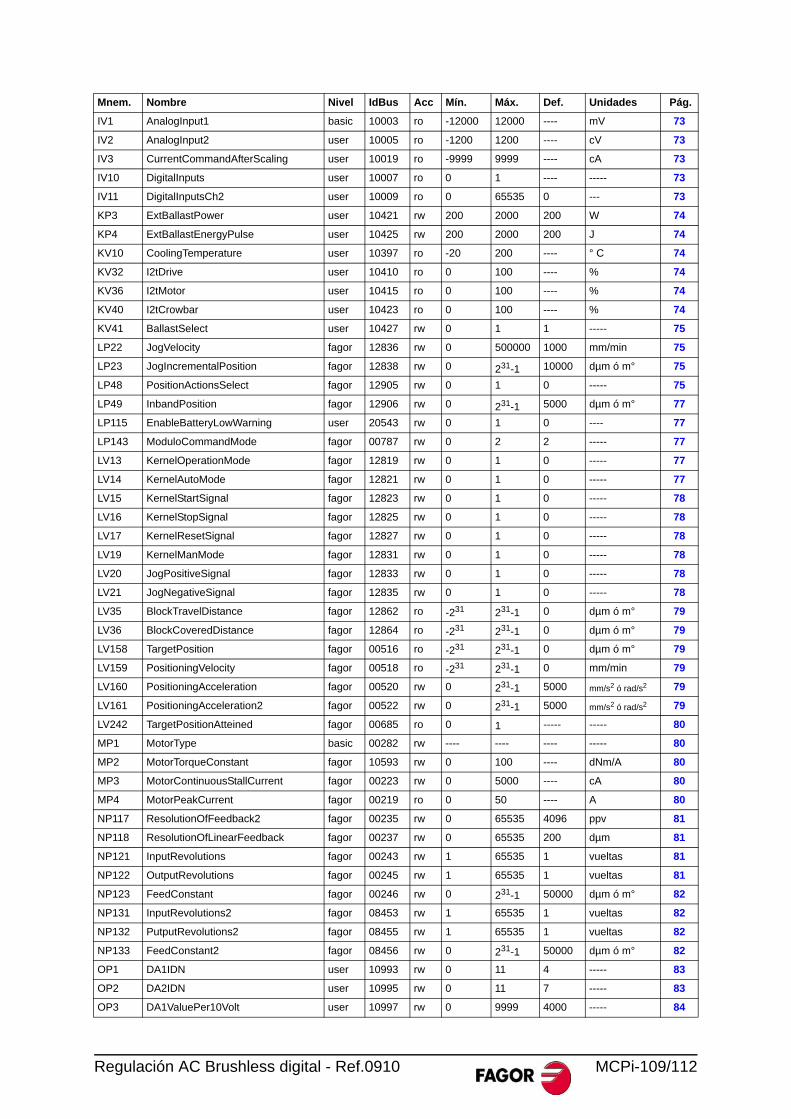
Mnem. Nombre Nivel IdBus Acc Mín. Máx. Def. Unidades Pág.
IV1 AnalogInput1 basic 10003 ro -12000 12000 ---- mV 73
IV2 AnalogInput2 user 10005 ro -1200 1200 ---- cV 73
IV3 CurrentCommandAfterScaling user 10019 ro -9999 9999 ---- cA 73
IV10 DigitalInputs user 10007 ro 0 1 ---- ----- 73
IV11 DigitalInputsCh2 user 10009 ro 0 65535 0 --- 73
KP3 ExtBallastPower user 10421 rw 200 2000 200 W 74
KP4 ExtBallastEnergyPulse user 10425 rw 200 2000 200 J 74
KV10 CoolingTemperature user 10397 ro -20 200 ---- ° C 74
KV32 I2tDrive user 10410 ro 0 100 ---- % 74
KV36 I2tMotor user 10415 ro 0 100 ---- % 74
KV40 I2tCrowbar user 10423 ro 0 100 ---- % 74
KV41 BallastSelect user 10427 rw 0 1 1 ----- 75
LP22 JogVelocity fagor 12836 rw 0 500000 1000 mm/min 75
LP23 JogIncrementalPosition fagor 12838 rw 0 231-1 10000 dµm ó m° 75
LP48 PositionActionsSelect fagor 12905 rw 0 1 0 ----- 75
LP49 InbandPosition fagor 12906 rw 0 231-1 5000 dµm ó m° 77
LP115 EnableBatteryLowWarning user 20543 rw 0 1 0 ---- 77
LP143 ModuloCommandMode fagor 00787 rw 0 2 2 ----- 77
LV13 KernelOperationMode fagor 12819 rw 0 1 0 ----- 77
LV14 KernelAutoMode fagor 12821 rw 0 1 0 ----- 77
LV15 KernelStartSignal fagor 12823 rw 0 1 0 ----- 78
LV16 KernelStopSignal fagor 12825 rw 0 1 0 ----- 78
LV17 KernelResetSignal fagor 12827 rw 0 1 0 ----- 78
LV19 KernelManMode fagor 12831 rw 0 1 0 ----- 78
LV20 JogPositiveSignal fagor 12833 rw 0 1 0 ----- 78
LV21 JogNegativeSignal fagor 12835 rw 0 1 0 ----- 78
LV35 BlockTravelDistance fagor 12862 ro -231 231-1 0 dµm ó m° 79
LV36 BlockCoveredDistance fagor 12864 ro -231 231-1 0 dµm ó m° 79
LV158 TargetPosition fagor 00516 ro -231 231-1 0 dµm ó m° 79
LV159 PositioningVelocity fagor 00518 ro -231 231-1 0 mm/min 79
LV160 PositioningAcceleration fagor 00520 rw 0 231-1 5000 mm/s2 ó rad/s2 79
LV161 PositioningAcceleration2 fagor 00522 rw 0 231-1 5000 mm/s2 ó rad/s2 79
LV242 TargetPositionAtteined fagor 00685 ro 0 1 ----- ----- 80
MP1 MotorType basic 00282 rw ---- ---- ---- ----- 80
MP2 MotorTorqueConstant fagor 10593 rw 0 100 ---- dNm/A 80
MP3 MotorContinuousStallCurrent fagor 00223 rw 0 5000 ---- cA 80
MP4 MotorPeakCurrent fagor 00219 ro 0 50 ---- A 80
NP117 ResolutionOfFeedback2 fagor 00235 rw 0 65535 4096 ppv 81
NP118 ResolutionOfLinearFeedback fagor 00237 rw 0 65535 200 dµm 81
NP121 InputRevolutions fagor 00243 rw 1 65535 1 vueltas 81
NP122 OutputRevolutions fagor 00245 rw 1 65535 1 vueltas 81
NP123 FeedConstant fagor 00246 rw 0 231-1 50000 dµm ó m° 82
NP131 InputRevolutions2 fagor 08453 rw 1 65535 1 vueltas 82
NP132 PutputRevolutions2 fagor 08455 rw 1 65535 1 vueltas 82
NP133 FeedConstant2 fagor 08456 rw 0 231-1 50000 dµm ó m° 82
OP1 DA1IDN user 10993 rw 0 11 4 ----- 83
OP2 DA2IDN user 10995 rw 0 11 7 ----- 83
OP3 DA1ValuePer10Volt user 10997 rw 0 9999 4000 ----- 84
Regulación AC Brushless digital - Ref.0910 MCPi-109/112
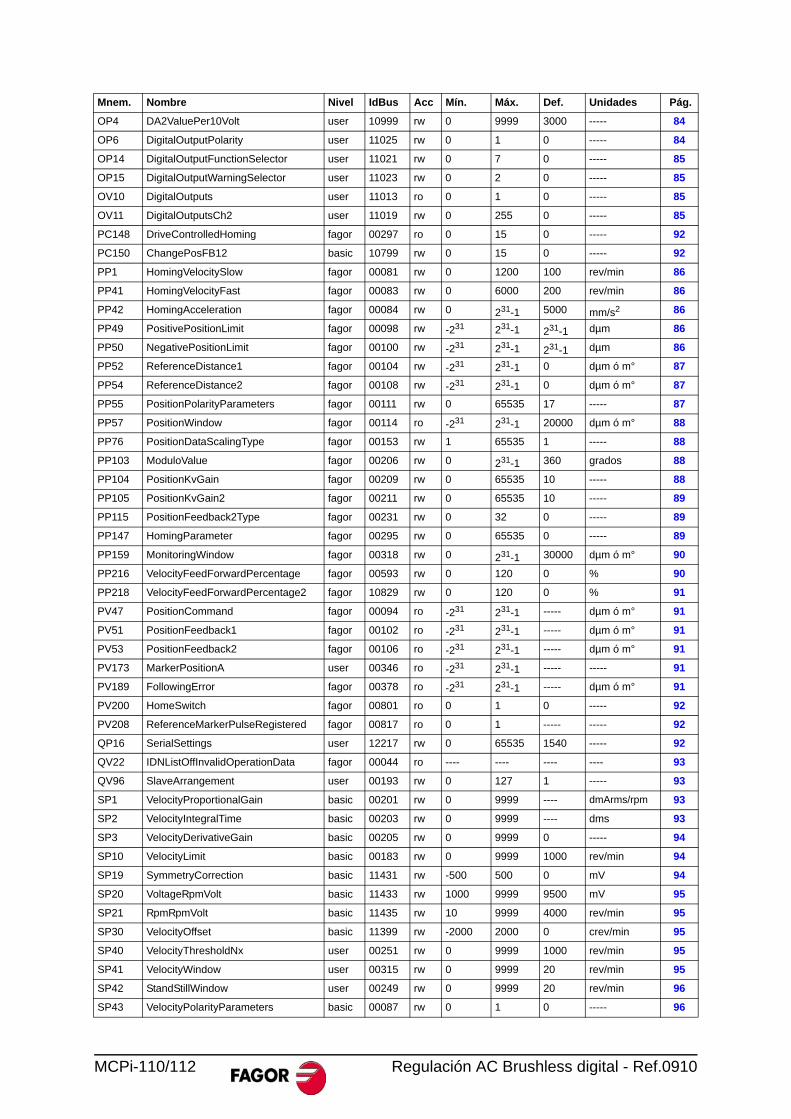
Mnem. Nombre Nivel IdBus Acc Mín. Máx. Def. Unidades Pág.
OP4 DA2ValuePer10Volt user 10999 rw 0 9999 3000 ----- 84
OP6 DigitalOutputPolarity user 11025 rw 0 1 0 ----- 84
OP14 DigitalOutputFunctionSelector user 11021 rw 0 7 0 ----- 85
OP15 DigitalOutputWarningSelector user 11023 rw 0 2 0 ----- 85
OV10 DigitalOutputs user 11013 ro 0 1 0 ----- 85
OV11 DigitalOutputsCh2 user 11019 rw 0 255 0 ----- 85
PC148 DriveControlledHoming fagor 00297 ro 0 15 0 ----- 92
PC150 ChangePosFB12 basic 10799 rw 0 15 0 ----- 92
PP1 HomingVelocitySlow fagor 00081 rw 0 1200 100 rev/min 86
PP41 HomingVelocityFast fagor 00083 rw 0 6000 200 rev/min 86
PP42 HomingAcceleration fagor 00084 rw 0 231-1 5000 mm/s2 86
PP49 PositivePositionLimit fagor 00098 rw -231 231-1 231-1 dµm 86
PP50 NegativePositionLimit fagor 00100 rw -231 231-1 231-1 dµm 86
PP52 ReferenceDistance1 fagor 00104 rw -231 231-1 0 dµm ó m° 87
PP54 ReferenceDistance2 fagor 00108 rw -231 231-1 0 dµm ó m° 87
PP55 PositionPolarityParameters fagor 00111 rw 0 65535 17 ----- 87
PP57 PositionWindow fagor 00114 ro -231 231-1 20000 dµm ó m° 88
PP76 PositionDataScalingType fagor 00153 rw 1 65535 1 ----- 88
PP103 ModuloValue fagor 00206 rw 0 231-1 360 grados 88
PP104 PositionKvGain fagor 00209 rw 0 65535 10 ----- 88
PP105 PositionKvGain2 fagor 00211 rw 0 65535 10 ----- 89
PP115 PositionFeedback2Type fagor 00231 rw 0 32 0 ----- 89
PP147 HomingParameter fagor 00295 rw 0 65535 0 ----- 89
PP159 MonitoringWindow fagor 00318 rw 0 231-1 30000 dµm ó m° 90
PP216 VelocityFeedForwardPercentage fagor 00593 rw 0 120 0 % 90
PP218 VelocityFeedForwardPercentage2 fagor 10829 rw 0 120 0 % 91
PV47 PositionCommand fagor 00094 ro -231 231-1 ----- dµm ó m° 91
PV51 PositionFeedback1 fagor 00102 ro -231 231-1 ----- dµm ó m° 91
PV53 PositionFeedback2 fagor 00106 ro -231 231-1 ----- dµm ó m° 91
PV173 MarkerPositionA user 00346 ro -231 231-1 ----- ----- 91
PV189 FollowingError fagor 00378 ro -231 231-1 ----- dµm ó m° 91
PV200 HomeSwitch fagor 00801 ro 0 1 0 ----- 92
PV208 ReferenceMarkerPulseRegistered fagor 00817 ro 0 1 ----- ----- 92
QP16 SerialSettings user 12217 rw 0 65535 1540 ----- 92
QV22 IDNListOffInvalidOperationData fagor 00044 ro ---- ---- ---- ---- 93
QV96 SlaveArrangement user 00193 rw 0 127 1 ----- 93
SP1 VelocityProportionalGain basic 00201 rw 0 9999 ---- dmArms/rpm 93
SP2 VelocityIntegralTime basic 00203 rw 0 9999 ---- dms 93
SP3 VelocityDerivativeGain basic 00205 rw 0 9999 0 ----- 94
SP10 VelocityLimit basic 00183 rw 0 9999 1000 rev/min 94
SP19 SymmetryCorrection basic 11431 rw -500 500 0 mV 94
SP20 VoltageRpmVolt basic 11433 rw 1000 9999 9500 mV 95
SP21 RpmRpmVolt basic 11435 rw 10 9999 4000 rev/min 95
SP30 VelocityOffset basic 11399 rw -2000 2000 0 crev/min 95
SP40 VelocityThresholdNx user 00251 rw 0 9999 1000 rev/min 95
SP41 VelocityWindow user 00315 rw 0 9999 20 rev/min 95
SP42 StandStillWindow user 00249 rw 0 9999 20 rev/min 96
SP43 VelocityPolarityParameters basic 00087 rw 0 1 0 ----- 96
MCPi-110/112 Regulación AC Brushless digital - Ref.0910
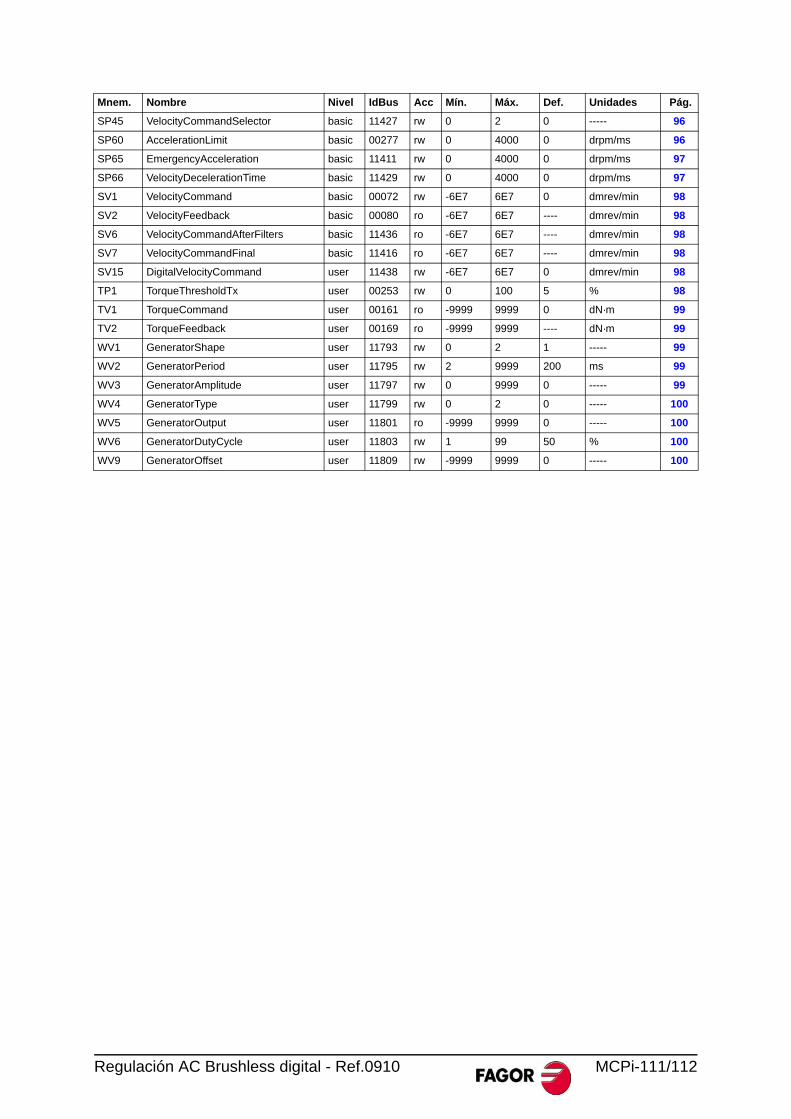
Mnem. Nombre Nivel IdBus Acc Mín. Máx. Def. Unidades Pág.
SP45 VelocityCommandSelector basic 11427 rw 0 2 0 ----- 96
SP60 AccelerationLimit basic 00277 rw 0 4000 0 drpm/ms 96
SP65 EmergencyAcceleration basic 11411 rw 0 4000 0 drpm/ms 97
SP66 VelocityDecelerationTime basic 11429 rw 0 4000 0 drpm/ms 97
SV1 VelocityCommand basic 00072 rw -6E7 6E7 0 dmrev/min 98
SV2 VelocityFeedback basic 00080 ro -6E7 6E7 ---- dmrev/min 98
SV6 VelocityCommandAfterFilters basic 11436 ro -6E7 6E7 ---- dmrev/min 98
SV7 VelocityCommandFinal basic 11416 ro -6E7 6E7 ---- dmrev/min 98
SV15 DigitalVelocityCommand user 11438 rw -6E7 6E7 0 dmrev/min 98
TP1 TorqueThresholdTx user 00253 rw 0 100 5 % 98
TV1 TorqueCommand user 00161 ro -9999 9999 0 dN·m 99
TV2 TorqueFeedback user 00169 ro -9999 9999 ---- dN·m 99
WV1 GeneratorShape user 11793 rw 0 2 1 ----- 99
WV2 GeneratorPeriod user 11795 rw 2 9999 200 ms 99
WV3 GeneratorAmplitude user 11797 rw 0 9999 0 ----- 99
WV4 GeneratorType user 11799 rw 0 2 0 ----- 100
WV5 GeneratorOutput user 11801 ro -9999 9999 0 ----- 100
WV6 GeneratorDutyCycle user 11803 rw 1 99 50 % 100
WV9 GeneratorOffset user 11809 rw -9999 9999 0 ----- 100
Regulación AC Brushless digital - Ref.0910 MCPi-111/112
MCPi-112/112 Regulación AC Brushless digital - Ref.0910
Oficinas subsidiarias de FAGOR.
SPAIN
Sede Central:FAGOR AUTOMATION S.COOP.
Bº San Andrés 19, Apdo. 144E-20500 ARRASATE-MONDRAGONwww.fagorautomation.comE-mail: [email protected]: 34-943-719200 / 34-943-039800Fax: 34-943-791712 34-943-771118 (Service Dept.)
Usurbil:FAGOR AUTOMATION S.COOP.Planta de UsurbilSan Esteban s/n Txoko-AldeE-20170 USURBILTel: 34-943-000690Fax: 34-943-360527E-mail: [email protected]
Eskoriatza:FAGOR AUTOMATION S.COOP.Planta de EskoriatzaTorrebaso Pasealekua, 4, Apdo. 50E-20540 ESKORIATZATel: 34-943-719200Fax: 34-943-039783
Barcelona:FAGOR AUTOMATION, CatalunyaParc Tecnològic del Vallès,Tecnoparc IIEdificio I Módulo AbC/Argenters, 508290 Cerdanyola del VallèsTel.: 34-93-4744375Fax: 34-93-4744327E-mail: [email protected]
FRANCEFAGOR AUTOMATION FRANCE SàrlParc Technologique de La Pardieu16 Rue Patrick Depailler63000 CLERMONT FERRANDTel.: 33-473277916Fax: [email protected]
GERMANYFAGOR AUTOMATION GmbHPostfach 604 D-73006 GÖPPINGENNördliche Ringstrasse, 100Tel.: 49-7161 15685-0Fax: 49-7161 1568579E-mail: [email protected]
ITALYFAGOR ITALIA S.R.L.Pal. CD3 P.T. - Via Roma, 10820060 CASSINA DE PECCHI (MI)Tel.: 39-0295301290Fax: 39-0295301298E-mail: [email protected]
UNITED KINGDOMFAGOR AUTOMATION UK Ltd.2 A Brunel CloseDrayton Field Industrial EstateDaventry NorthamptonshireNN11 8RBTel: 44-1327 300067Fax: 44-1327 300880E-mail: [email protected]
PORTUGAL
FAGOR AUTOMATION LTDA.Sucursal PortuguesaRua Gonçalves Zarco nº 1129-B-2ºSalas 210/2124450 LEÇA DA PALMEIRATel: 351 22 996 88 65Fax: 351 22 996 07 19E-mail: [email protected]
USAChicago:FAGOR AUTOMATION CORP.2250 Estes AvenueELK GROVE VILLAGE, IL 60007Tel: 1-847-9811500
1-847-9811595 (Service)Fax:1-847-9811311E-mail: [email protected]
California:FAGOR AUTOMATION West Coast3176 Pullman Ave., Unit 110COSTA MESA, CA 92626Tel: 1-714-9579885Fax: 1-714-9579891E-mail: [email protected]
New Jersey:FAGOR AUTOMATION East CoastTel: 1-973-7733525Fax: 1-973-7733526E-mail: [email protected]
South East:FAGOR AUTOMATION SOUTH EAST4234 Amber Ridge Ln- VALRICO, FL 33594Tel: 813 654 4599E-mail: [email protected]
Ohio:FAGOR AUTOMATION OHIO BRANCHWesterville OH 43081Tel: 1 614-855-5720Fax: 1 614-855-5928E-mail: [email protected]
CANADAOntario:FAGOR AUTOMATION ONTARIOUnit 3, 6380 Tomken RoadMISSISSAUGA L5T 1Y4Tel: 1-905-6707448Fax: 1-905-6707449 E-mail: [email protected]
Montreal:FAGOR AUTOMATION QUEBECTel.: 1-450-2270588Fax: 1-450-2276132E-mail: [email protected]
Windsor:FAGOR AUTOMATION WINDSORTel.: 1-519 944-5674Fax: 1-519 944-2369
BRAZILFAGOR AUTOMATION DO BRASILCOM.IMP. E EXPORTAÇAO LTDA.Rua Homero Baz do Amaral, 331CEP 04774-030 SAO PAULO-SPTel.: 55-11-56940822Fax: 55-11-56816271E-mail: [email protected]
CHINABeijing:BEIJIN FAGOR AUTOMATION EQUIPMENT Co.,LTD.C-1 Yandong Building, No.2 Wanhong Xijie, XibajianfangChaoyang DistrictBEIJING, Zip Code: 100015Tel: 86-10-84505858Fax: 86-10-84505860E-mail: [email protected]
Nanjing:
FAGOR AUTOMATION EQUIPMENT LTD. NANJING OFFICERoom 803, Holiday Inn (Nanjing) 45 Zhongshan Beilu, 210008 NANJING, P.R. CHINATel: 86-25-83328259Fax: 86-25-83328260E-mail: [email protected]
Guangzhou:
Beijin FAGOR AUTOMATION Equipment Ltd. Guangzhou OfficeRoom 915 Lihao Plaza No. 18 Jichanglu Baiyun District510405 GUANGZHOU, P.R CHINA.Tel: 86-20-86553124Fax: 86-20-86553125E-mail: [email protected]
Shanghai:
Beijing FAGOR AUTOMATION equipment Ltd. SHANGHAI BRANCHRoom No.547 Tianmu Xilu20070 SHANGHAI, P.R CHINA.Tel: 86-21-63539007/63538919Fax: 86-21-63538840E-mail: [email protected]
Chengdu:
Beijing FAGOR AUTOMATION equipment Ltd. Chengdu OfficeRoom 912, No. 16 Dayelu610100 CHENGDU, P.R CHINA.Tel: 86-28-66132081Fax: 86-28-66132082E-mail: [email protected]
HONG KONGFAGOR AUTOMATION (ASIA) LTD.Room 628. Tower II, Grand Central Plaza138 Shatin Rural Committee RoadShatin, HONG KONGTel: 852-23891663Fax: 852-23895086 E-mail: [email protected]
KOREA, Republic ofFAGOR AUTOMATION KOREA, LTD.Room No. 707 Byucksan Digital Valley 2nd
481-10 Gasan-dong. Geumcheon-guSeoul 153-803, KoreaTel: 82 2 2113 0341Fax: 82 2 2113 0343E-mail: [email protected]
TAIWAN, R.C.O.FAGOR AUTOMATION TAIWAN CO., LTD.Nº 24 Ta-Kuang St. Nan-Tun Dist. 408Taichung, TAIWAN R.O.C.Tel: 886-4-2 3271282Fax: 886-4-2 3271283
SINGAPOREFAGOR AUTOMATION (S) PTE.LTD.240 MacPherson Road06-05 Pines Industrial BuildingSINGAPORE 348574Tel: 65-68417345 / 68417346Fax: 65-86417348E-mail: [email protected]
MALAYSIAFAGOR AUTOMATION (M) SDN.BHD. (638038-H)No.39, Jalan Utama 1/7Taman Perindustrian Puchong Utama47100 Puchong, Selangor Darul EhsanTel: +60 3 8062 2858Fax: +60 3 8062 3858E-mail: [email protected]
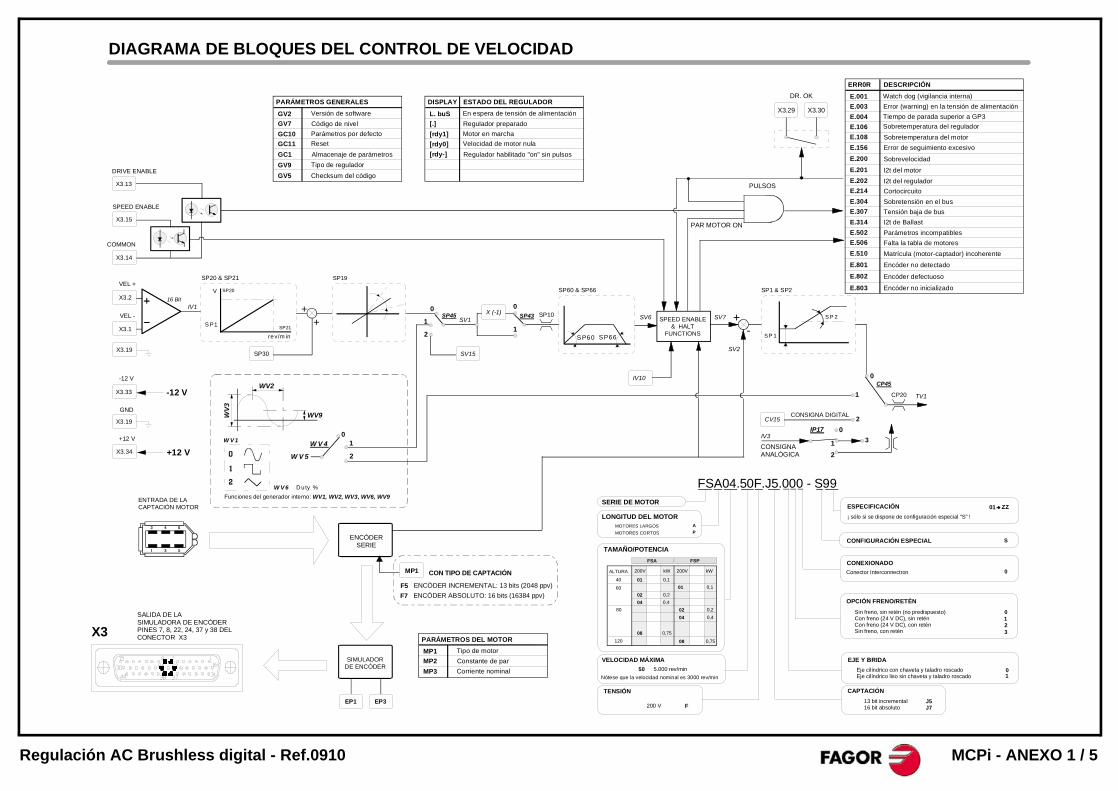
Regulación AC Brushless digital - Ref.0910 MCPi - ANEXO 1 / 5
DIAGRAMA DE BLOQUES DEL CONTROL DE VELOCIDAD
DRIVE ENABLE
SPEED ENABLE
COMMON
X3.13
X3.15
X3.14
X3.2
X3.1
VEL +
VEL -
X3.19
16 BitIV1
SP20
S P1
V
SP21
rev/m in
SP20 & SP21
+
SP30
SP19
0
1
2
WV9WV
3
WV2
Funciones del generador interno: WV1, WV2, WV3, WV6, WV9
0W V 1
W V 6 D uty %
W V 5
W V 4 1
2
SP60 SP66
SP60 & SP66
SV60
1
2
SV15
SP45SV1
SP43X (-1) SP10
0
1
SPEED ENABLE & HALT
FUNCTIONS
+SP 1
S P 2
SP1 & SP2
-SV7
+
CP45
CP20
0
ENCÓDERSERIE
ENTRADA DE LA CAPTACIÓN MOTOR
2 4 6
1 3 5
SIMULADOR DE ENCÓDER
SALIDA DE LASIMULADORA DE ENCÓDERPINES 7, 8, 22, 24, 37 y 38 DELCONECTOR X3
EP1 EP3
MP1
X3.33
X3.19
-12 V
GND
X3.34
-12 V
+12 V
+12 V
TV1
0
1
2
IV3
1
2CV15CONSIGNA DIGITAL
SV2
IV10
IP17
CONSIGNA ANALÓGICA
3
PAR MOTOR ON
DR. OK
X3.29 X3.30
PULSOS
F5 ENCÓDER INCREMENTAL: 13 bits (2048 ppv)
F7 ENCÓDER ABSOLUTO: 16 bits (16384 ppv)
CON TIPO DE CAPTACIÓN
LONGITUD DEL MOTOR
SERIE DE MOTOR
MOTORES LARGOS MOTORES CORTOS
VELOCIDAD MÁXIMA
Nótese que la velocidad nominal es 3000 rev/min
50 5.000 rev/min
TENSIÓN400 V A200 V F
TAMAÑO/POTENCIA
CAPTACIÓN
13 bit incremental J516 bit absoluto J7
EJE Y BRIDA
Eje cilíndrico con chaveta y taladro roscado Eje cilíndrico liso sin chaveta y taladro roscado
CONEXIONADO
Conector Interconnectron
0 1
0
CONFIGURACIÓN ESPECIAL S
ESPECIFICACIÓN 01 ZZ
A
P
FSA04.50F.J5.000 - S99
OPCIÓN FRENO/RETÉN
Sin freno, sin retén (no predispuesto) Con freno (24 V DC), sin retén Con freno (24 V DC), con retén Sin freno, con retén
0 1 2 3
¡ sólo si se dispone de configuración especial "S" !
Checksum del código
Tipo de regulador
Almacenaje de parámetros
Reset
Parámetros por defecto
Código de nivel
Versión de softwareGV2
PARÁMETROS GENERALES
GV7
GC10
GC11
GC1
GV9
GV5
Regulador habilitado "on" sin pulsos
Velocidad de motor nula
Motor en marcha
Regulador preparado
En espera de tensión de alimentaciónL. buS
ESTADO DEL REGULADOR
[.]
[rdy1]
DISPLAY
[rdy0]
[rdy-]
Sobretemperatura del motor
Sobretemperatura del regulador
Tiempo de parada superior a GP3
Error (warning) en la tensión de alimentación
Watch dog (vigilancia interna)E.001
DESCRIPCIÓN
E.003
E.004
ERR0R
E.106
E.108
Error de seguimiento excesivoE.156
SobrevelocidadE.200
I2t del motorE.201
I2t del reguladorE.202
CortocircuitoE.214
Sobretensión en el busE.304
Tensión baja de busE.307
I2t de BallastE.314
Parámetros incompatiblesE.502
Falta la tabla de motoresE.506
Matrícula (motor-captador) incoherenteE.510
Encóder no detectadoE.801
Encóder defectuosoE.802
Encóder no inicializadoE.803
X3
ALTURA 200V kW
04 0,4
60
200V kW
02 0,280
04 0,4
08 0,75
08 0,75120
FSA FSP
40 01 0,1
02 0,2
01 0,1
Corriente nominal
Constante de par
Tipo de motorMP1
PARÁMETROS DEL MOTOR
MP2
MP3
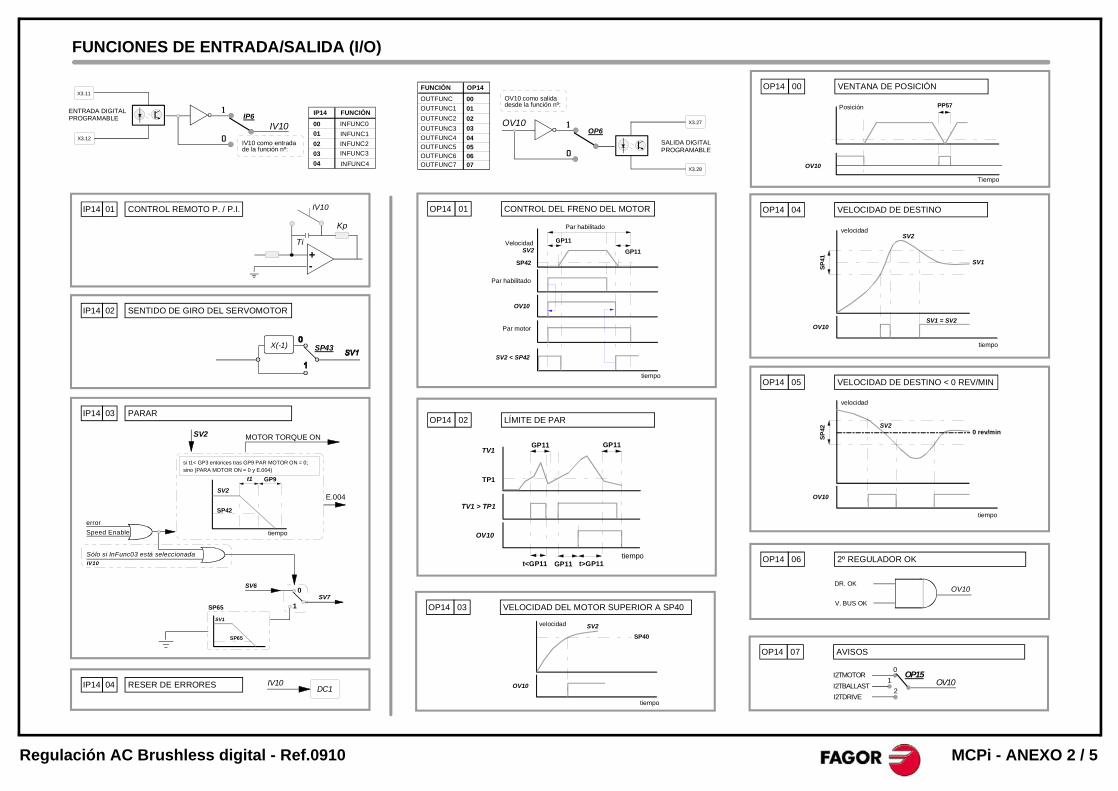
MCPi - ANEXO 2 / 5
Posición
Tiempo
OV10
PP57
OV10I2TMOTOR
I2TBALLAST
I2TDRIVE
OP15
2
0
1
OV10DR. OK
V. BUS OK
OV10
SV2
SV1
SV1 = SV2
SP
41
OP14 04 VELOCIDAD DE DESTINO
OP14 05 VELOCIDAD DE DESTINO < 0 REV/MIN
OP14 06 2º REGULADOR OK
tiempo
velocidad
OV10
SV20 rev/min
SP
42
velocidad
tiempo
OP14 07 AVISOS
OP14 00 VENTANA DE POSICIÓN
Regulación AC Brushless digital - Ref.0910
FUNCIONES DE ENTRADA/SALIDA (I/O)
IV10 como entrada de la función nº:
ENTRADA DIGITAL PROGRAMABLE
X3.11
X3.12
IV100
1IP6
SALIDA DIGITAL PROGRAMABLE
X3.27
X3.28
OV10
0
1OP6
SP42
Velocidad SV2
GP11
tiempo
GP11
SV2 < SP42
OV10
Par habilitado
TP1
TV1GP11
OV10
TV1 > TP1
GP11
t<GP11 GP11 t>GP11
SP40
OV10
SV2
INFUNC4
INFUNC3
INFUNC2
INFUNC1
INFUNC000
FUNCIÓN
01
02
IP14
03
04
00OUTFUNC
OP14FUNCIÓN
01OUTFUNC1
02OUTFUNC2
03OUTFUNC3
04OUTFUNC4
05OUTFUNC5
06OUTFUNC607OUTFUNC7
OV10 como salida desde la función nº:
+-
Kp
Ti
IV10
SP42
SV2
t1 GP9
tiempo
si t1< GP3 entonces tras GP9 PAR MOTOR ON = 0;sino (PARA MOTOR ON = 0 y E.004)
E.004
SV2 MOTOR TORQUE ON
0
1
SV6
SV7
SV1
SP65
SP65
IV10
error
Sólo si InFunc03 está seleccionada
SP43X(-1)
DC1IV10
IP14 01 CONTROL REMOTO P. / P.I.
IP14 02 SENTIDO DE GIRO DEL SERVOMOTOR
IP14 03 PARAR
IP14 04 RESER DE ERRORES
OP14 01 CONTROL DEL FRENO DEL MOTOR
Par motor
Par habilitado
OP14 02 LÍMITE DE PAR
tiempo
OP14 03 VELOCIDAD DEL MOTOR SUPERIOR A SP40
tiempo
velocidad
Speed Enable
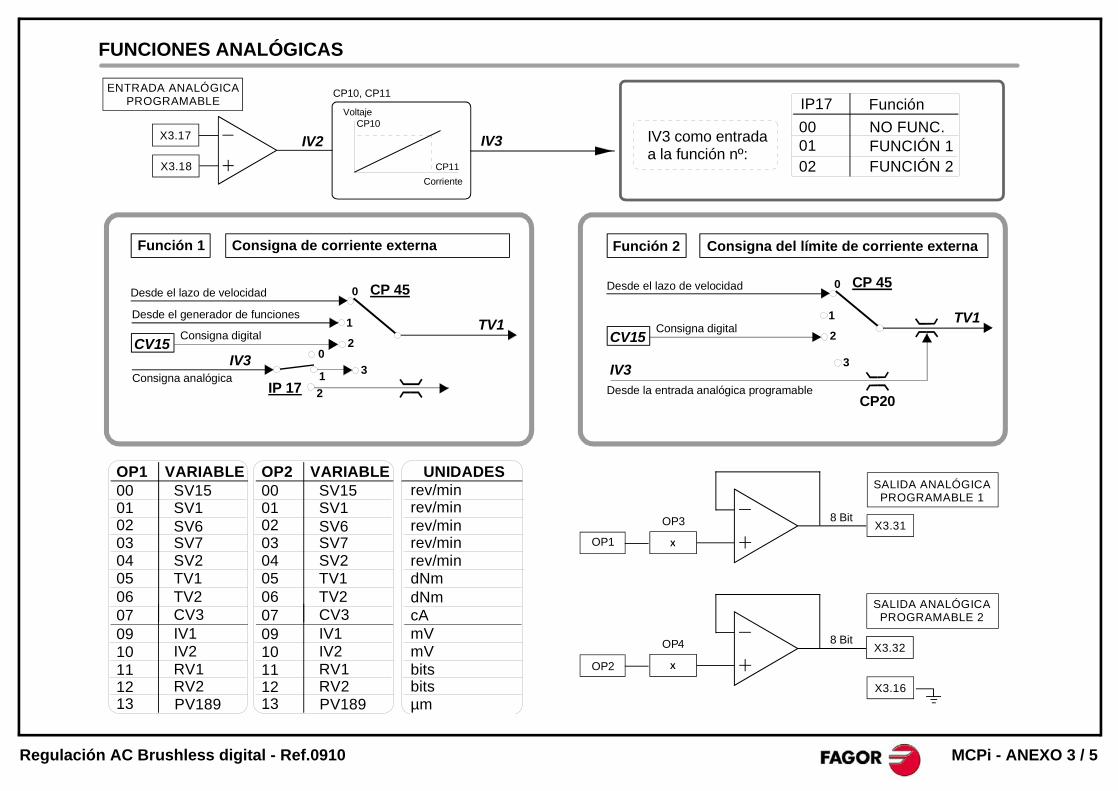
MCPi - ANEXO 3 / 5
8 Bit
SALIDA ANALÓGICAPROGRAMABLE 1
00
IP17 Función
0102
NO FUNC.FUNCIÓN 1FUNCIÓN 2
da
TV1
programableCP20
X3.32
X3.31
SALIDA ANALÓGICAPROGRAMABLE 2
X3.16
8 Bit
na del límite de corriente externa
2
CP 450
1
3
Regulación AC Brushless digital - Ref.0910
ENTRADA ANALÓGICAPROGRAMABLE
Corriente
Voltaje
CP11
CP10
2
CP 450
TV1
IV3
X
OP3
XOP2
OP4
CP10, CP11
Desde el lazo de velocidad
CV15
Consigna analógica
1
3
Desde el generador de funciones
1
0
2IP 17
Consigna digital
FUNCIONES ANALÓGICAS
IV3 como entraa la función nº:
Función 1
UNIDADESrev/minrev/minrev/minrev/minrev/mindNmdNmcAmVmVbitsbitsµm
VARIABLEOP100 SV15010203040506070910111213
SV1SV6SV7SV2TV1TV2CV3IV1IV2RV1RV2PV189
VARIABLEOP200 SV15010203040506070910111213
SV1SV6SV7SV2TV1TV2CV3IV1IV2RV1RV2PV189
Desde el lazo de velocidad
CV15Consigna digital
IV3Desde la entrada analógica
IV3IV2
OP1
X3.17
X3.18
Consigna de corriente externa Función 2 Consig
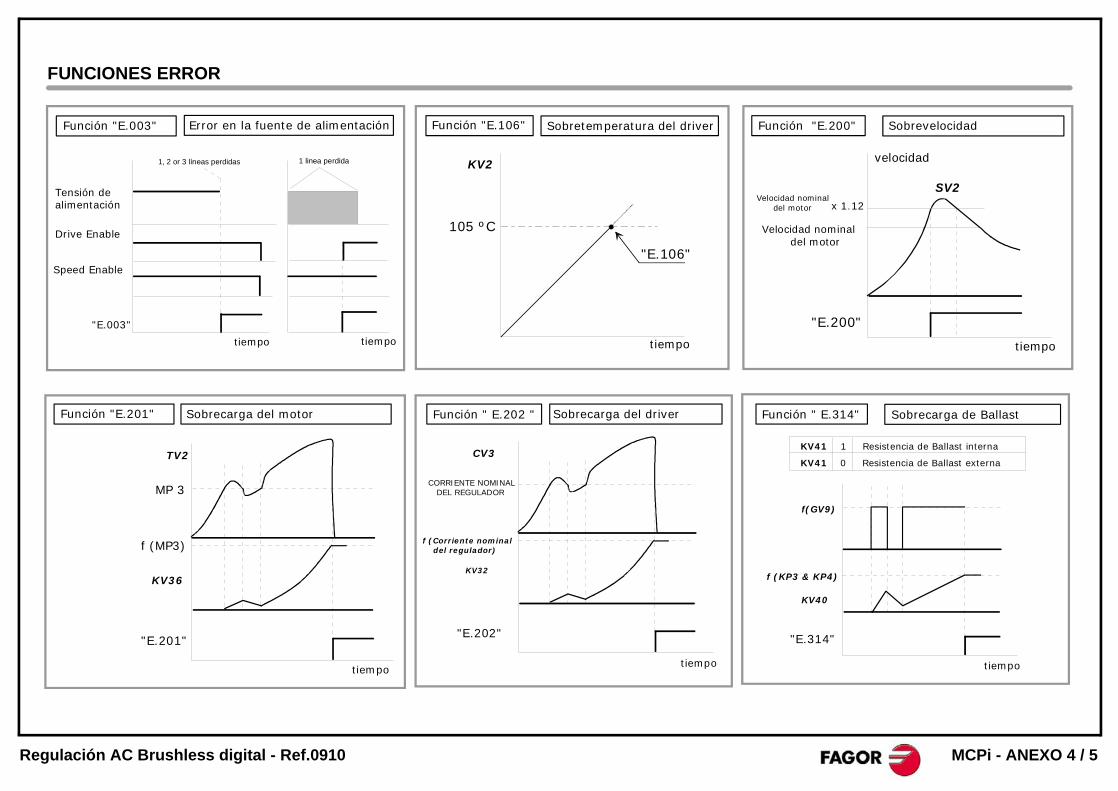
Regulación AC Brushless digital - Ref.0910 MCPi - ANEXO 4 / 5
tiempo tiempo
Drive Enable
Speed Enable
"E.003"
1, 2 or 3 líneas perdidas 1 linea perdida
tiempo
SV2Velocidad nominal del motor x 1.12
"E.200"
tiempo
KV32
"E.202"
CV3
CORRIENTE NOMINAL DEL REGULADOR
f (Corriente nominal del regulador)
tiempo
KV36
f (MP3)
"E.201"
TV2
MP 3
KV40
"E.314"
f (KP3 & KP4)
Función "E.200" Sobrevelocidad
Función "E.201" Sobrecarga del motor Función " E.202 " Sobrecarga del driver Función " E.314" Sobrecarga de Ballast
tiempo
KV2
"E.106"
Función "E.106" Sobretemperatura del driver
f(GV9)
KV41 1 Resistencia de Ballast interna
KV41 0 Resistencia de Ballast externa
105 ºC Velocidad nominal del motor
tiempo
FUNCIONES ERROR
Tensión dealimentación
Función "E.003" Error en la fuente de alimentación
velocidad
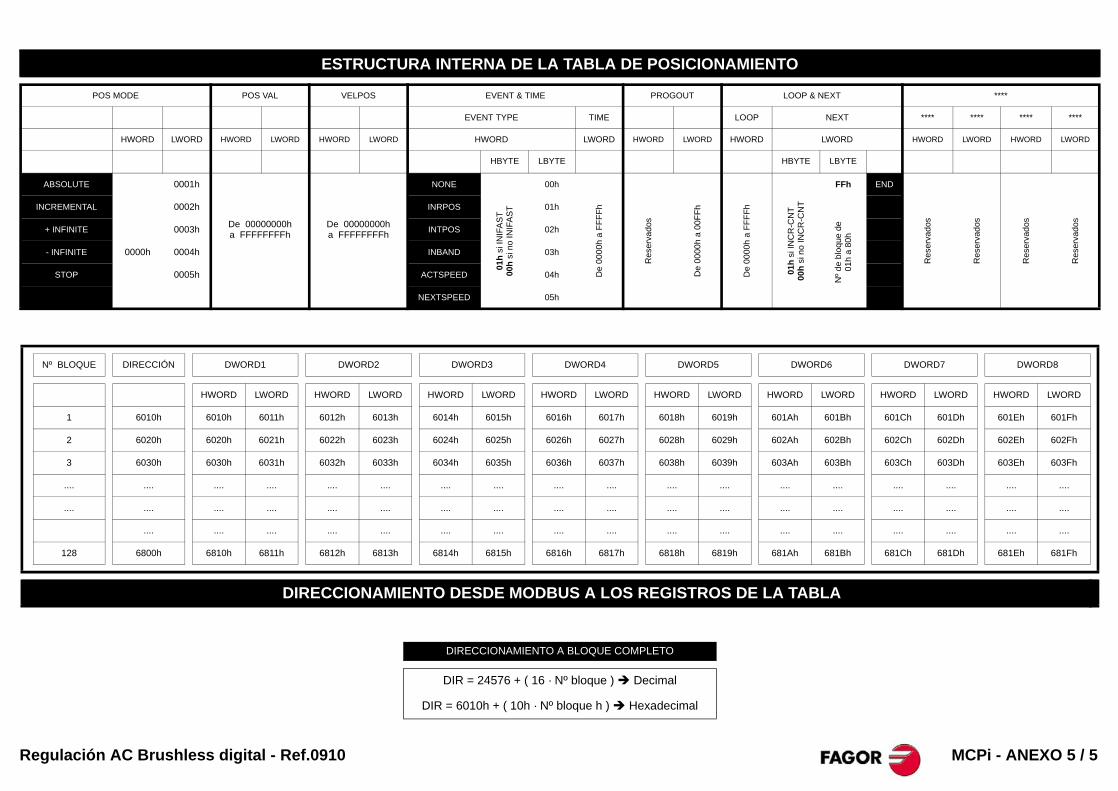
Regulación AC Brushless digital - Ref.0910 MCPi - ANEXO 5 / 5
ESTRUCTURA INTERNA DE LA TABLA DE POSICIONAMIENTO
POS MODE POS VAL VELPOS EVENT & TIME PROGOUT LOOP & NEXT ****
EVENT TYPE TIME LOOP NEXT **** **** **** ****
HWORD LWORD HWORD LWORD HWORD LWORD HWORD LWORD HWORD LWORD HWORD LWORD HWORD LWORD HWORD LWORD
HBYTE LBYTE HBYTE LBYTE
ABSOLUTE 0001h
De 00000000h a FFFFFFFFh
De 00000000h a FFFFFFFFh
NONE
01h
si I
NIF
AS
T00
h s
i no
INIF
AS
T
00h
De
000
0h a
FF
FF
h
Res
erva
dos
De
0000
h a
00F
Fh
De
000
0h a
FF
FF
h
01h
si I
NC
R-C
NT
00h
si n
o IN
CR
-CN
T
FFh END
Res
erva
dos
Res
erva
dos
Res
erva
dos
Res
erva
dos
INCREMENTAL 0002h INRPOS 01h
Nº
de
bloq
ue d
e 01
h a
80h
+ INFINITE 0003h INTPOS 02h
- INFINITE 0000h 0004h INBAND 03h
STOP 0005h ACTSPEED 04h
NEXTSPEED 05h
Nº BLOQUE DIRECCIÓN DWORD1 DWORD2 DWORD3 DWORD4 DWORD5 DWORD6 DWORD7 DWORD8
HWORD LWORD HWORD LWORD HWORD LWORD HWORD LWORD HWORD LWORD HWORD LWORD HWORD LWORD HWORD LWORD
1 6010h 6010h 6011h 6012h 6013h 6014h 6015h 6016h 6017h 6018h 6019h 601Ah 601Bh 601Ch 601Dh 601Eh 601Fh
2 6020h 6020h 6021h 6022h 6023h 6024h 6025h 6026h 6027h 6028h 6029h 602Ah 602Bh 602Ch 602Dh 602Eh 602Fh
3 6030h 6030h 6031h 6032h 6033h 6034h 6035h 6036h 6037h 6038h 6039h 603Ah 603Bh 603Ch 603Dh 603Eh 603Fh
.... .... .... .... .... .... .... .... .... .... .... .... .... .... .... .... .... ....
.... .... .... .... .... .... .... .... .... .... .... .... .... .... .... .... .... ....
.... .... .... .... .... .... .... .... .... .... .... .... .... .... .... .... ....
128 6800h 6810h 6811h 6812h 6813h 6814h 6815h 6816h 6817h 6818h 6819h 681Ah 681Bh 681Ch 681Dh 681Eh 681Fh
DIRECCIONAMIENTO DESDE MODBUS A LOS REGISTROS DE LA TABLA
DIRECCIONAMIENTO A BLOQUE COMPLETO
DIR = 24576 + ( 16 · Nº bloque ) Decimal
DIR = 6010h + ( 10h · Nº bloque h ) Hexadecimal