Generación de Modelos de Elevación Digital a Partir de...
10
ISTAR - CIS1510AP03 Abstract—The article that follows is the result of a Graduation Project, which is developing a new method for the production of Digital Elevation Models (DEM) from capturing aerial photographs using Unmanned Aerial Vehicles (UAV), which through the generated model can be displayed altimetry land values chosen as a case study. Palabras Clave— Fotografía Aérea, Modelos de Elevación Digital, Nubes de Puntos, Vehículos Aéreos no Tripulados. I. INTRODUCCIÓN Los Modelos de Elevación Digital (DEM), son estructuras numéricas que describen las características morfológicas de un terreno, también catalogado como una representación de la distribución espacial de la altitud de la superficie del terreno. El presente artículo presenta el resultado obtenido en la realización del Trabajo de Grado que propone un nuevo método para la obtención DEM a partir de la captura de fotografía aérea haciendo uso de Vehículos aéreos no Tripulados (UAV), para su obtención se realiza la adquisición de la nube de puntos asociada al terreno a partir de la fotografía aérea donde se obtienen los valores altimétricos haciendo uso de algoritmos de visión estéreo múltiple. Posteriormente, se propone una herramienta de software que concluye con la implementación del método para la obtención del modelo de elevación digital. El presente artículo se encuentra compuesto por la sección del marco teórico que contextualiza al lector acerca de Los trabajos que se han realizado con UAVs para la obtención DEM, así como los conceptos relacionados con la temática. La sección de análisis se compone por el desarrollo del método propuesto para el desarrollo del Trabajo de Grado, así como la descripción del proceso de levantamiento de requerimientos y diseño arquitectural de la herramienta de software propuesta para la obtención de modelos de elevación digital. La sección de desarrollo de la solución y resultados, se compone de la descripción del proceso de implementación de la herramienta de software basado en la metodología de desarrollo de software elegida, así como la ejecución de pruebas que validan la solución propuesta con su respecto análisis de resultados. Finalmente, se presentan las conclusiones, análisis de impacto y trabajo futuro a desarrollar para dar continuidad al desarrollo de la temática tratada en el presente Trabajo de Grado. II. OPORTUNIDAD Durante los últimos años, los vehículos aéreos no tripulados, han ido tomando cada vez más fuerza en diferentes campos del conocimiento, constituyéndose como una seria alternativa a la aviación tripulada en determinado tipo de misiones y aplicaciones. Dentro de las ventajas y beneficios que ofrecen se encuentra: • Fácil y rápido despliegue en misión. • Adaptabilidad gracias a sus cargas útiles modulares. • Gran maniobrabilidad y poder de acceso a sitios inaccesibles para vehículos tripulados. • Menor peso, menor consumo de energía. • Menor impacto ambiental (menos emisiones de CO 2) como de ruido. • Menor coste de mantenimiento y elevada relación coste/eficiencia. [1] En la actualidad una de las técnicas más empleadas es la fotogrametría [2] la cual nos permite realizar mediciones en el tamaño, forma y posición en base a fotografías, es por esto que se ha querido dar uso al equipamiento integrado en los Generación de Modelos de Elevación Digital a Partir de Imágenes Obtenidas Desde Vehículos Aéreos no Tripulados (UAVs) Erick Julián Coral Crespo Departamento de Ingeniería de Sistemas Pontificia Universidad Javeriana Bogotá, Colombia [email protected]
Transcript of Generación de Modelos de Elevación Digital a Partir de...

ISTAR - CIS1510AP03
Abstract—The article that follows is the result of a Graduation
Project, which is developing a new method for the production of
Digital Elevation Models (DEM) from capturing aerial
photographs using Unmanned Aerial Vehicles (UAV), which
through the generated model can be displayed altimetry land
values chosen as a case study.
Palabras Clave— Fotografía Aérea, Modelos de Elevación
Digital, Nubes de Puntos, Vehículos Aéreos no Tripulados.
I. INTRODUCCIÓN
Los Modelos de Elevación Digital (DEM), son estructuras
numéricas que describen las características morfológicas de un
terreno, también catalogado como una representación de la
distribución espacial de la altitud de la superficie del terreno.
El presente artículo presenta el resultado obtenido en la
realización del Trabajo de Grado que propone un nuevo
método para la obtención DEM a partir de la captura de
fotografía aérea haciendo uso de Vehículos aéreos no
Tripulados (UAV), para su obtención se realiza la adquisición
de la nube de puntos asociada al terreno a partir de la fotografía
aérea donde se obtienen los valores altimétricos haciendo uso
de algoritmos de visión estéreo múltiple. Posteriormente, se
propone una herramienta de software que concluye con la
implementación del método para la obtención del modelo de
elevación digital.
El presente artículo se encuentra compuesto por la
sección del marco teórico que contextualiza al lector acerca de
Los trabajos que se han realizado con UAVs para la obtención
DEM, así como los conceptos relacionados con la temática. La
sección de análisis se compone por el desarrollo del método
propuesto para el desarrollo del Trabajo de Grado, así como la
descripción del proceso de levantamiento de requerimientos y
diseño arquitectural de la herramienta de software propuesta
para la obtención de modelos de elevación digital.
La sección de desarrollo de la solución y resultados, se
compone de la descripción del proceso de implementación de
la herramienta de software basado en la metodología de
desarrollo de software elegida, así como la ejecución de
pruebas que validan la solución propuesta con su respecto
análisis de resultados.
Finalmente, se presentan las conclusiones, análisis de impacto
y trabajo futuro a desarrollar para dar continuidad al desarrollo
de la temática tratada en el presente Trabajo de Grado.
II. OPORTUNIDAD
Durante los últimos años, los vehículos aéreos no tripulados,
han ido tomando cada vez más fuerza en diferentes campos del
conocimiento, constituyéndose como una seria alternativa a la
aviación tripulada en determinado tipo de misiones y
aplicaciones. Dentro de las ventajas y beneficios que ofrecen se
encuentra:
• Fácil y rápido despliegue en misión.
• Adaptabilidad gracias a sus cargas útiles modulares.
• Gran maniobrabilidad y poder de acceso a sitios
inaccesibles para vehículos tripulados.
• Menor peso, menor consumo de energía.
• Menor impacto ambiental (menos emisiones de CO 2)
como de ruido.
• Menor coste de mantenimiento y elevada relación
coste/eficiencia. [1]
En la actualidad una de las técnicas más empleadas es la
fotogrametría [2] la cual nos permite realizar mediciones en el
tamaño, forma y posición en base a fotografías, es por esto que
se ha querido dar uso al equipamiento integrado en los
Generación de Modelos de Elevación Digital a
Partir de Imágenes Obtenidas Desde Vehículos
Aéreos no Tripulados (UAVs)
Erick Julián Coral Crespo
Departamento de Ingeniería de Sistemas
Pontificia Universidad Javeriana
Bogotá, Colombia

ISTAR - CIS1510AP03
vehículos aéreos no tripulados para la captura de imágenes
aéreas.
Por consiguiente, se observó la oportunidad para proponer
un método alternativo para la obtención de modelos de
elevación digital haciendo uso de esta tecnología emergente,
dado que actualmente los métodos de captura de datos (directos,
indirectos) de las características topográficas de un terreno
tienen un alto costo, existe incertidumbre sobre algunos
parámetros en la generación del DEM, así como problemas
asociados a las fotografías capturadas por vuelos de gran
escala. [3]
Dentro de las ventajas que ofrecen los UAV se encuentran:
bajo costo, flexibles, obtención de imágenes de alta resolución,
capaces de volar a baja altura, fácil de despegar y aterrizar.
Otras ventajas son la reducción de los costos, así como la
finalización del proyecto mucho más rápido, posibilidad de
inspeccionar objetos y áreas remotamente muy complejas,
inaccesibles y peligrosas, donde el uso de las técnicas
convencionales no funciona.
Haciendo uso del equipamiento del UAV y apoyados con
los vuelos de baja escala se realizan tomas aéreas de alta
calidad, donde se logra obtener con detalle las características
que definen los terrenos a modelar.
Una vez obtenidas estas imágenes se procede a extraer la nube
de puntos asociada, donde se identifican las características en
común que comparten las imágenes obteniendo de cada
coordenada (x, y) su altura correspondiente. Posteriormente, se
realiza el procesamiento adecuado hasta la obtención del
Modelo de Elevación Digital.
III. ANÁLISIS DE LA SOLUCIÓN
En a presente sección se realiza una descripción del análisis
a partir de la división por fases del método propuesto, donde
cada una de una de estas fases reúne los conceptos
concernientes a: captura de las imágenes por medio del uso de
UAVs, obtención nube de puntos a partir de las imágenes
capturadas y finalmente el procesamiento realizado a la nube
de puntos para la obtención de un Modelo de Elevación Digital.
Dentro del análisis del método propuesto se presentaran:
• Variables relacionadas, que intervienen en el desarrollo de
la solución.
• Método Generación Modelos de Elevación Digital a partir
de fotografías capturadas por UAV.
• Análisis de herramientas para la implementación del
Software de apoyo al método.
VARIABLES RELACIONADAS
A. Captura de fotografías aéreas haciendo uso del UAV
1) Cámara
Existen diferentes tipos de cámaras, las cuales pueden ser
integradas al UAV dependiendo de las características
correspondientes a las cargas soportadas por el vehículo. Sin
embargo, todas las cámaras proporcionan diferentes
especificaciones que intervienen en la calidad de las fotografías
aéreas, correspondiente a du resolución en Megapíxeles así
como su FPS. Para el desarrollo de este método es importante
conocer que para obtener el producto deseado se recomienda el
uso de cámaras digitales sin lente angular, debido a que esta
característica especial de ciertas cámaras fotográficas
distorsiona las medidas en las fotografías resultantes.
2) Solape
En el contexto de la fotogrametría aérea se debe tener en
cuenta que el solape longitudinal mínimo necesario para que
cualquier zona del terreno a restituir aparezca en dos
fotogramas consecutivos sería del 50% de la superficie de cada
fotograma, pero por seguridad, en la práctica es habitual
emplear un recubrimiento a partir del 60%, así se tiene la
garantía de que los pequeños errores de alineación de la cámara
no van a provocar que algunas zonas del terreno sean cubiertas
por una fotografía individual y no puedan, en consecuencia, ser
restituidas. Habitualmente la zona a cubrir por el vuelo es de
una extensión tal que no puede ser cubierta de una sola vez en
el vuelo, por lo que se hace necesario realizar varias pasadas
con trayectorias paralelas entre sí; lo cual hace necesario que se
produzca un solape transversal, habitualmente superior al 20%.
[4]
B. Generación nube de puntos a partir de las imágenes
capturadas
1) Cantidad Fotografías
Corresponde a la cantidad de fotografías capturadas del
terreno a modelar mediante el uso de vehículos aéreos no
tripulados es posible obtener fotografías individuales para la
posterior obtención de ortomosaicos, curvas de nivel, nubes de
puntos entre otros productos.
Dependiendo de la dimensión del terreno a modelar es
directamente proporcional la cantidad de fotografías que deben
ser capturadas con un solape entre el 50% - 60%, que cubran
en su totalidad el terreno para la obtención de nubes de puntos
que lo representen de manera completa y correcta.
C. Procesamiento nube de puntos y generación DEM
1) Cantidad de Puntos
La cantidad de puntos generados post- procesamiento de las
imágenes obtenidas por el UAV, es una variable importante al
momento de la visualización de la nube de puntos y el proceso
previo a la obtención del Modelo de Elevación Digital, debido

ISTAR - CIS1510AP03
a que está ligado directamente con el tiempo que se utiliza
dependiendo a lo que se desee realizar. Es por esto, que el
procesamiento de grandes cantidades de puntos puede tomar un
tiempo considerable y el gasto de recursos de la maquina donde
se esté realizando el proceso.
D. Método Generación Modelos de Elevación Digital a
partir de fotografías capturadas por UAV
A continuación se realizara la descripción del método
propuesto para la generación modelos de elevación digital a
partir de imágenes obtenidas desde vehículos aéreos no
tripulados (UAVs), de igual manera se clasificaron las
variables que intervienen en el desarrollo de la solución
propuesta realizando una división en 3 fases representadas en
la Figura 1 para la generación DEM, así como los resultados
esperados en cada fase a realizar.
Fig. 1. Fases Método Generación Modelos de Elevación Digital a partir de
Fotografías capturas por UAV
1) Fase I
En el desarrollo de esta fase se aborda la captura de las
imágenes por medio del uso de UAVs, así como una
descripción del vehículo aéreo y las características asociadas
para tener en cuenta, descripción de la planeación del vuelo
para el UAV y las condiciones a tener en cuenta al momento
de la obtención de las imágenes del terreno.
a) Características UAV
Para el proceso de captura de imágenes aéreas a partir de
vehículos aéreos no tripula-dos, con la finalidad de asegurar el
desarrollo adecuado del método propuesto es necesario tener en
cuenta:
• El modelo del UAV a utilizar para la captura de las
imágenes puede ser de tipo Avión o Multicoptero.
• El UAV debe tener equipado una cámara fotográfica
digital, que permita realizar la captura de las imágenes por
medio de algún método de obturación automática, como
recomendación de cámaras que permitan está funcionalidad se
encuentran: Cámaras Canon S100, S110, ELPH 110 HS y
SX230HS
• Cada drone varía en tamaño y peso, y la duración del vuelo
oscila de horas a minutos. El tamaño del aparato influye en el
peso que puede soportar, es decir, el tipo de cámara de
fotográfica que puede sustentar. Ciertamente, cuanto mejor sea
la cámara fotográfica, mejores resultados fotogramétricos se
obtendrán. [5]
b) Planeamiento de la Misión
Previo a la realización del vuelo, hay que hacer una pequeña
planificación. Esto es, la comprobación del tiempo atmosférico
y de la velocidad del aire. El día ideal sería aquel que estuviera
un poco nublado para que la iluminación fuera uniforme, sin
sombras y que no hubiera ráfagas de aire. [5]
En apoyo al planeamiento de la misión se puede hacer uso
del software Misión Planner como se muestra en la Figura 2
que representa una estación de control de tierra. Es compatible
sólo con Windows. Misión Planner se puede utilizar como una
utilidad de configuración o como complemento de control
dinámico del vehículo autónomo. Algunas de las
funcionalidades ofrecidas por el software son
• Piloto automático que controla su vehículo (dispositivos
equipados al UAV como giróscopo, acelerómetro,
magnetómetro, barómetro y GPS).
• Planificar, guardar y cargar misiones autónomas.
• Interfaz con un simulador de vuelo PC para crear un
simulador completo UAV.
• Supervisar el estado de su UAV mientras está en
funcionamiento.
Fig. 2. Mission Planner Software
La Figura 2 presenta el software de Mission Planner, en el
cual se configuran los parámetros correspondientes, según el
UAV a utilizar y los requerimientos del solape requerido entre
imágenes.
En busca de generar un producto de calidad se debe tener
entre 50 -100 fotografías del terreno con una superposición del
70%-80% entre pistas párelas y entre 50-65% entre pistas

ISTAR - CIS1510AP03
Adyacentes. La altura oscila en promedio entre los 40 -80mts.
2) Fase II
En el desarrollo de esta fase se aborda la obtención de la
nube de puntos a partir de las imágenes capturadas por medio
del uso de UAVs, en el cual se menciona las herramientas
utilizadas para su generación así como las salidas intermedias
esperadas en su realización. Como documentación anexa para
la fase II del método se realizó el manual de obtención de la
nube de puntos donde se explica el paso a paso para su
generación
a) 2.1 Generación Nube de Puntos
Para generar la nube de puntos correspondiente a las
imágenes obtenidas por el UAV del terreno a modelar se
utilizara software existente que nos permita su generación y
posterior manera de exportar para su procesamiento, haciendo
uso de la herramienta de software a implementar para el
desarrollo del método (Software propuesto generación modelos
de elevación digital).
La elección del software a utilizar en esta fase se realizó de
acuerdo a las funcionalidades necesarias para el correcto
desarrollo del método planteado (Análisis de Herramientas). De
esta manera la herramienta a utilizar para la generación de la
nube de puntos es Agisoft Photoscan producto de software que
realiza procesamiento fotogramétrico de imágenes digitales y
genera datos espaciales 3D. [6]
El proceso a llevar a cabo una vez se haya realizado la
captura de las imágenes y en colaboración de Agisoft
Photoscan, se ha documentado en su totalidad en el anexo
(Manual Obtención Nube de Puntos) del trabajo de grado, el
cual describe la secuencia de pasos en su totalidad para la
obtención del archivo que contiene la nube de puntos asociada
al terreno de estudio.
3) Fase III
En el desarrollo de esta fase se aborda el procesamiento
realizado en la nube de puntos para la obtención de un Modelo
de Elevación Digital, a partir de las imágenes captura-das por
medio del uso de UAVs.
a) Archivo Nube de Puntos
Para la lectura del archivo que contiene la información
correspondiente a la nube de puntos del terreno es necesario
conocer la estructura que maneja los archivos correspondientes
a la extensión (.PLY). Un archivo de PLY consta de una
cabecera seguida de una lista de vértices y, a continuación una
lista de polígonos. La cabecera especifica cuántos vértices y
polígonos están en el archivo, y también indica qué propiedades
se asocian con cada vértice, tales como (x, y, z) coordenadas,
normales y color (RGB). [7]
Es necesario aclarar que siguiendo los lineamientos del
método el archivo de salida correspondiente se genera el
archivo con extensión (.PLY) cumpliendo con las estructura
que corresponde como lo representa la Figura 3, sin embargo al
exportarse una nube de puntos esta no contiene información
correspondiente a los polígonos ya que no se ha generado una
reconstrucción de la superficie, el archivo se conforma de las
coordenadas de cada punto, normal asociada y color del punto.
Fig. 3. Estructura Archivo .PLY
b) Generación Malla de Puntos
Para la generación de la malla de puntos se aplicará el
algoritmo de Delaunay, que permite la triangulación de la nube
de puntos siguiendo los criterios establecidos para su uso. Una
vez se realice la lectura del archivo (.PLY), se procederá a
almacenar la información concerniente a los puntos como lo es
coordenadas (X, Y, Z) y las normales asociadas a cada punto.
A continuación se realizara una descripción de la
triangulación de Delaunay propuesto para la construcción de la
malla a partir de la nube de puntos generada del terreno.
c) Triangulación Delaunay
Con la aplicación del algoritmo de Delaunay se obtiene una
malla de puntos a partir de un conjunto de puntos de entrada no
estructurados que se encuentran representados en el plano xy,
con una altura z particular para cada punto cumplimiento:
El algoritmo de Delaunay como lo muestra la Figura 4 dado
un conjunto de pun-tos en el plano, tres puntos definen un
triángulo de Delaunay si el circulo que circunscribe a dicho
triangulo no contiene ningún otro punto del conjunto de datos.
[8]
Fig. 2. Triangulación de Delaunay

ISTAR - CIS1510AP03
d) Generación Superficie
Una vez se haya realizado correctamente la generación de la
malla triangular a partir del conjunto de puntos de entrada, se
debe aplicar una textura para poder visualizar una superficie
que represente el modelo de elevación digital obtenido, para
efectos de la aplicación del método en su totalidad se propone
utilizar una textura de un solo color que permita visualizar la
altimetría del terreno, para trabajos futuros se espera poder
aplicar la visualización de la textura real de la nube de puntos.
La salida esperada para este momento es la obtención del DEM.
E. Análisis de Herramientas
En esta sección se realiza un análisis de las herramientas que se
utilizaran para la implementación de un método para generar
modelos de elevación digital a partir de imágenes capturadas
desde vehículos aéreos no tripulados (UAV).
A partir del planteamiento de las fases para el desarrollo del
método se han identificado dos fases en las que interviene el
uso y la implementación de software, por tal razón se realizara
una descripción y especificación de los criterios por los cuales
se ha determinado el uso de estas herramientas.
a) Herramientas Implementación Fase II
Para el desarrollo de la Fase II se ha realizado una búsqueda y
selección de herramientas, acorde a las funcionalidades
necesarias para la generación de nubes de puntos a partir de
fotografía aérea.
A continuación se realizará una descripción de cada una de las
herramientas propuestas, así como la respectiva evaluación a
partir de los criterios específicos para su elección.
VisualSFM
Es una aplicación con interfaz gráfica para la reconstrucción 3D
usando la estructura de movimiento (SFM). El sistema de
reconstrucción integra varios proyectos anteriores de su autor:
SIFT en la GPU (SiftGPU), Paquete Multiprocesador de Ajuste,
y Aumento de tiempo lineal en Estructura incremental de
movimiento. VisualSFM corre rápido explotando el
paralelismo multinúcleo para la detección de características, la
función de adaptación y ajuste de paquete. [9]
Pix4D
Es un software que procesa automáticamente las imágenes
terrestres y aéreas adquiridas por UAVs ligeros o aeronaves que
utilizan su tecnología innovadora basada pura-mente en el
contenido de la imagen. Este software de escritorio convierte
imágenes en resultados altamente precisos, oportunos y
personalizables para una amplia gama de aplicaciones GIS y
CAD. [10]
Agisoft Photoscan
Agisoft Photoscan es un producto de software Stand-Alone que
realiza el procesamiento fotogramétrico de imágenes digitales
y genera datos espaciales 3D para ser utilizado en aplicaciones
de SIG, documentación patrimonio cultural, y la producción de
efectos visuales, así como para mediciones indirectas de objetos
de diferentes escalas. [6]
Autopano
Detrás de la simplicidad Autopano y facilidad de uso se esconde
un motor de stitching basado en algoritmos avanzados. La
tecnología de stitching en imágenes (SIFT) incluido en
Autopano fue desarrollado como parte de un proyecto de
investigación en la Universidad de British Columbia en
Vancouver (Canadá). Se ha demostrado matemáticamente ser
la mejor tecnología en el mundo en reconocer similitudes entre
imágenes. [11]
b) Criterios de Selección
Para la selección de la herramienta de software acorde a las
funcionalidades necesarias para la obtención de una nube de
puntos a partir de fotografías capturadas con UAV, se han
tenido en cuenta los siguientes criterios:
• Facilidad de Adquisición: Se clasifica con un valor de
ALTO/MEDIO/BAJO, dependiendo de la facilidad con la se
puede adquirir el software para realizar la generación del
producto deseado.
• Recibe como entrada fotografías: Si el software cumple con
el parámetro de recibir fotografías para la obtención de la nube
de puntos.
• Genera nube de puntos: Si el software tiene como
funcionalidad la generación de una nube de puntos a partir de
las fotografías que se le den como entradas.
• Exporta nube de puntos: Se da un valor de x o vacío, si el
software permite ex-portar la nube de puntos en el formato
necesario para su posterior procesamiento.
• Calidad nube de puntos: Se clasifica con un valor de
ALTO/MEDIO/BAJO, de-pendiendo de la calidad con la cual
se generó la nube de puntos y si se cumple con un producto
acorde a lo esperado.
Tabla 1- Criterios Selección Herramientas Fase II
De acuerdo al análisis obtenido en la Tabla 1, la herramienta
elegida para el desarrollo de la Fase II del método es Agisoft
Photoscan, cumpliendo con los criterios establecidos para su
elección en busca de la obtención de un producto de calidad.
ISTAR - CIS1510AP03
F. Herramientas Implementación Fase III
Para el desarrollo de la Fase III se ha realizado una búsqueda y
selección de herramientas, acorde a las funcionalidades
necesarias para la visualización de nubes de Puntos, generación
y visualización mallas de puntos, finalmente la generación y
visualización de Modelos de Elevación Digital a partir del
método propuesto desde la Fase I.
A continuación se realizara una descripción de cada una de las
herramientas propuestas, así como la respectiva evaluación a
partir de los criterios específicos para su elección.
a) Criterios de Selección
Para la selección de la herramienta de software o librería acorde
a las funcionalidades necesarias para la generación y
visualización de los productos previos al modelo de elevación
digital a partir de fotografías capturadas con UAV, se han
tenido en cuenta los siguientes criterios:
• Facilidad de Adquisición: Se clasifica con un valor de
ALTO/MEDIO/BAJO, dependiendo de la facilidad con la se
puede adquirir el software o librería para realizar la generación
del producto deseado.
• Librerías Manejo Nube de Puntos: Si las librerías elegidas
manejan funciones específicas para el manejo y posterior
procesamiento de una nube de puntos.
• Herramientas de Visualización: S las librerías elegidas
manejan funciones correspondientes a la visualización de
productos intermedios a la generación del modelo de elevación
digital.
• Intuitivas/Facilidad de Uso: Se da un valor de x o vacío, si
las herramientas a utilizar abordan funcionalidades que
permitan al programador tener un trabajo eficiente y de calidad,
así como documentación clara de las clases que contienen
ejemplificando posibles usos que se puedan dar al momento del
desarrollo de un producto de software.
• Producto de Calidad: Se clasifica con un valor de
ALTO/MEDIO/BAJO de-pendiendo las salidas, para el método
específicamente visualizaciones de gráficos de calidad.
Tabla 2- Criterios de Selección Herramientas Fase III
De acuerdo al análisis obtenido en la Tabla 2, la herramienta
elegida para el desarrollo de la Fase III del método es QT/VTK,
cumpliendo con los criterios establecidos para su elección en
busca de la obtención de un producto de calidad.
IV. DISEÑO DE LA SOLUCIÓN
En la presente sección, se realiza una descripción del diseño
correspondiente a la herramienta de software propuesta para la
implementación de la Fase III del método, donde se encuentran
respectivamente la descripción del diseño.
1. Metodología de desarrollo de software
El desarrollo del software se encuentra orientado en apoyo al
método de generación de modelos de elevación digital a partir
de fotografía aérea obtenida por UAVs, que genera como
producto intermedio una nube de puntos asociada a las
fotografías de un terreno para la obtención del DEM.
El software cuenta con una interfaz gráfica para el usuario
(GUI), donde se le desplegara un menú con las funcionalidades
relacionadas al procesamiento de la nube de pun-tos para la
obtención de un Modelo de Elevación Digital asociado a la
fotografías obtenidas por el UAV, así mismo la GUI cuenta con
ventanas de visualización de los pro-ductos intermedios previos
a la generación del DEM buscando que el usuario final pueda
apreciar con mayor detalle las visualizaciones relacionadas con
las funcionalidades del software.
El ciclo de vida correspondiente a la metodología de desarrollo
de software corresponde a una variación del Modelo de Espiral
como se presenta en la Figura 4 [12], donde se propone el uso
de prototipos evolutivos en la fase de desarrollo y validación,
en busca de un prototipo que esté acorde a las necesidades
propuestas para el desarrollo del método propuesto para la
obtención de un Modelo de Elevación Digital.
Fig. 5. Metodología de desarrollo Espiral
Las fases consideradas para la realización del software, fueron
las siguientes:
1. Análisis.
2. Diseño.
3. Implementación.
3.1 Ejecución de pruebas funcionales y ajustes.
En la fase de análisis el objetivo es la elaboración del
documento SRS con los requerimientos asociados al software,
en la fase de diseño se abarca la selección de herramientas y la
elaboración del presente documento SDD, en la fase final se
abarca el desarrollo del software apoyado en una fase conjunta
de realización de pruebas y ajustes en busca de la obtención de
un producto acorde al método propuesto para la obtención de
modelos de elevación digital a partir de una nube de puntos
obtenida por foto-grafías desde UAV y las necesidades del
usuario.

ISTAR - CIS1510AP03
V. RESULTADOS
En esta sección de resultados se presentan la realización del
Plan de Pruebas, con el propósito de evaluar la funcionalidad
tanto del método propuesto así como del software
implementado en apoyo para la obtención de Modelos de
Elevación Digital.
1. Prueba I – Terreno sin Vegetación, Obtención
Modelo de Elevación Digital a partir de nube de
puntos obtenida por fotografía aérea con UAV
1) Propósito
Aplicación directa del método en apoyo con la herramienta
de software a desarrollar, a partir de fotografía aérea haciendo
uso de UAV para la obtención del respectivo modelo de
elevación digital correspondiente al terreno de análisis.
2) Fase I
La captura de las imágenes se realizó con un cuadricóptero
fabricado por Advector S.A.S como lo presenta Figura 6,
compuesto por 4 multirotores, permite realizar vuelos entre
15-16 minutos y cumple las siguientes características:
• Peso: 1700gr sin carga.
• Peso Máximo: 2500 gr al despegue.
• Alimentación eléctrica (LiPo).
• Vuelo completamente autónomo.
Fig. 6. UAV Advector S.A.S Prueba I
La cámara incorporada en el UAV es de referencia Canon
s110, con las siguientes características:
• Sensor CMOS de 12,1 MP; HS System con DIGIC 5
• Objetivo de 24 mm, f/2,0, con zoom 5x
• IS Inteligente
• Wi-Fi y GPS a través del móvil
• Anillo de Control del objetivo, Control totalmente Manual
y RAW
• Pantalla táctil de 7,5 cm (3,0")
• Vídeos Full HD, HDMI-CEC
• Ráfaga de alta velocidad y Alta Calidad (HQ)
• Smart Auto
La autonomía de vuelo del cuadricóptero es proporcionada por
ArduPilot (Piloto auto-mático), que integra sensores como
giróscopo, acelerómetro, magnetómetro, barómetro, GPS entre
otros. Para la captura de las fotografías se realiza el
planeamiento de la misión a través del software Mission
Planner, donde se configuran los parámetros correspondientes.
3) Fase II
El procesamiento realizado a las fotografías obtenidas por
UAV, se realizó haciendo uso de la herramienta de Agisoft
Photoscan donde se dio generación al archivo Te-
rreno_PlanoNB.ply, que contiene la nube de puntos asociada al
terreno, compuesta por:
• 1’429.854 Puntos.
• Normales asociadas.
• Atributo RGB.
3) Fase III
Se realiza la lectura del archivo correspondiente a la nube de
puntos generada, del cultivo obteniendo su visualización, sin
tener en cuenta el atributo RGB. El usuario puede interactuar
con la visualización realizando zoom o con ayuda del mouse
desplazándose por el gráfico, como se presenta en las Figuras
7y 8.
Fig. 7. Visualización Nube de Puntos 1, Prueba I
Fig. 8. Visualización Nube de Puntos 2, Prueba I
• Siguiendo la secuencia de pasos se aplica el algoritmo
encargado de triangular los puntos de la nube generando la
siguiente visualización, como se presenta en la Figuras 9:

ISTAR - CIS1510AP03
Fig. 9. Visualización Malla de Puntos 1, Prueba I
• Finalmente, se genera el modelo de elevación digital
correspondiente al terreno fotografiado obteniendo su
visualización, el resultado de la cantidad de puntos procesados
y el tiempo que se tardó en generarlo, como se presenta en la
Figura 10, Figura 11.
Fig. 10. Resultado cantidad de puntos procesados, Prueba I
Fig. 11. Visualización Modelo de Elevación Digital 1, Prueba I
5) Prueba I
a) Análisis de Resultados
A partir del Modelo de Elevación Digital obtenido en la
realización de la prueba, se procede a realizar su respectivo
análisis apoyado en los métodos tradicionalmente utilizados
para su validación. Para lo cual se validara a partir del siguiente
Test:
• “Debe hacerse un análisis estadístico del DEM, un simple
histograma de las elevaciones permitirá descubrir anomalías no
detectables con la simple visualización, como el que los valores
de las curvas de nivel aparezcan con excesiva frecuencia. “ [13]
Para realizar el respectivo análisis del Modelo de Elevación
Digital se ha aplicado un trabajo estadístico de la nube de
puntos insumo base del cual fue obtenido el DEM, donde se
evalúa:
• Cantidad de Curvas de Nivel Obtenidas: 23.087
• Valor Altimétrico de la Curva de Nivel.
• Frecuencia de aparición de la curva de Nivel.
La Figura 12, presenta el histograma obtenido posterior
análisis de los resultados.
Fig. 12. Histograma DEM
A partir del histograma presentado en la Figura 41 se puede
apreciar que las curvas de nivel que tienen mayor frecuencia de
aparición en el Modelo de Elevación Digital obtenido son:
• Nivel altimétrico: 218.405 y 218.684.
• Frecuencia de aparición: 163 puntos.
De esta manera se puede llegar a la conclusión que en
proporción a la cantidad de pun-tos que componen la nube que
son 1’429.854, la frecuencia de aparición máxima de las
curvas de nivel es del 0,011% valor no representativo escala de
error considerado como bajo.
En cuanto al tiempo de procesamiento y generación del
Modelo de Elevación digital del terreno haciendo uso de
equipo de cómputo de las siguientes características:
• DELL Inspiron N Series.
• Intel Core i5
• Disco Duro de 500 GB
• Memoria RAM 4GB
El software desarrollado en apoyo al método propuesto lo
genero en un tiempo de 96, 18 Segundos.
ISTAR - CIS1510AP03
2. Prueba II – Terreno con Vegetación, Obtención
Modelo de Elevación Digital a partir de nube de
puntos obtenida por fotografía aérea con UAV.
1) Propósito
Aplicación directa del método en apoyo con la herramienta
de software a desarrollar, a partir de fotografía aérea haciendo
uso de UAV para la obtención del respectivo modelo de
elevación digital correspondiente al terreno de análisis. En
búsqueda de posibles variaciones del DEM obtenido al contar
con puntos que representan vegetación en la zona.
2) Fase II
El procesamiento realizado a las fotografías obtenidas por
UAV, se realizó haciendo uso de la herramienta de Agisoft
Photoscan donde se dio generación al archivo Murmu-llo-
puntos-2.ply, que contiene la nube de puntos asociada al
terreno, compuesta por:
• 6’130.399 Puntos.
• Normales asociadas.
• Atributo RGB.
3) Fase I
La captura de las imágenes se realizó con un cuadricóptero
fabricado por Advector S.A.S, compuesto por 4 multirotores
presentado en la Figura 42.
.
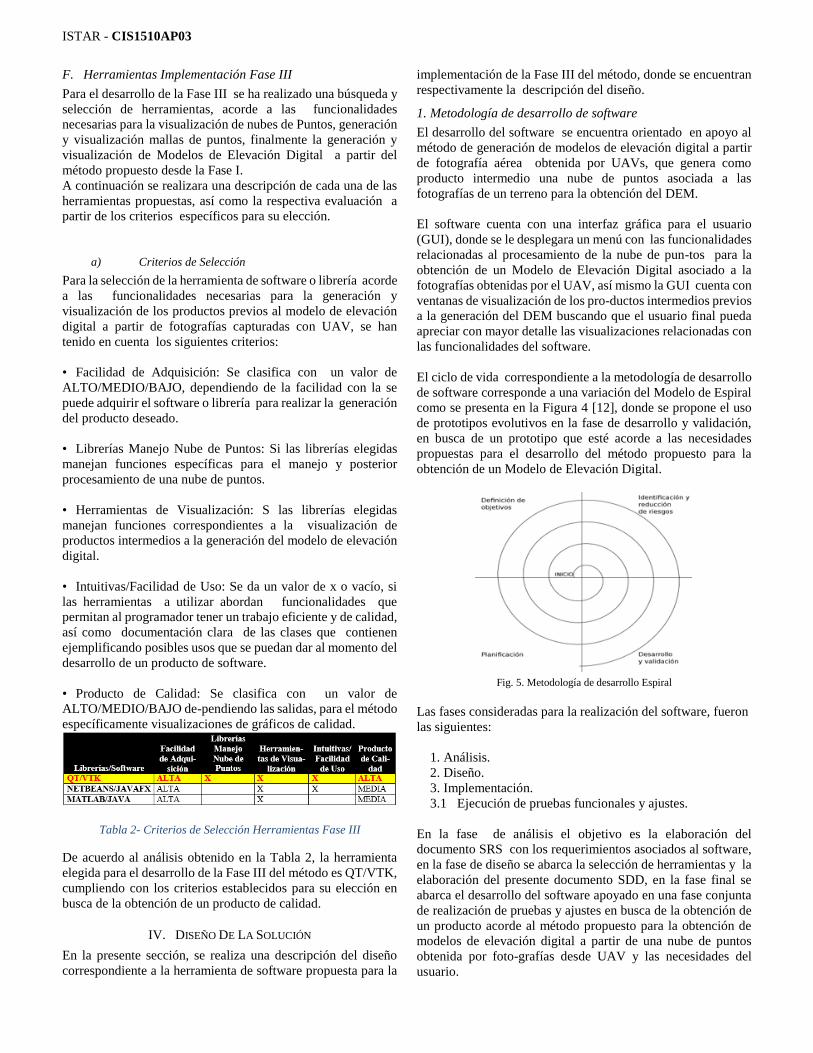
4) Fase III
• Se realizó la lectura del archivo correspondiente a la nube
de puntos generada, de la finca el murmullo obteniendo su
visualización, sin tener en cuenta el atributo RGB. El usuario
puede interactuar con la visualización realizando zoom o con
ayuda del mouse desplazándose por el gráfico, como se
muestra en la Figura 13.
Fig. 13. Visualización Nube de Puntos 1, Prueba II
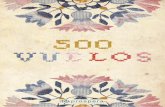
• Siguiendo la secuencia de pasos se aplica el algoritmo
encargado de triangular los puntos de la nube generando la
siguiente visualización, como se muestra en la Figura 14:
Fig. 14. Visualización Malla de Puntos 1, Prueba II
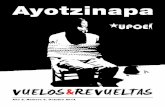
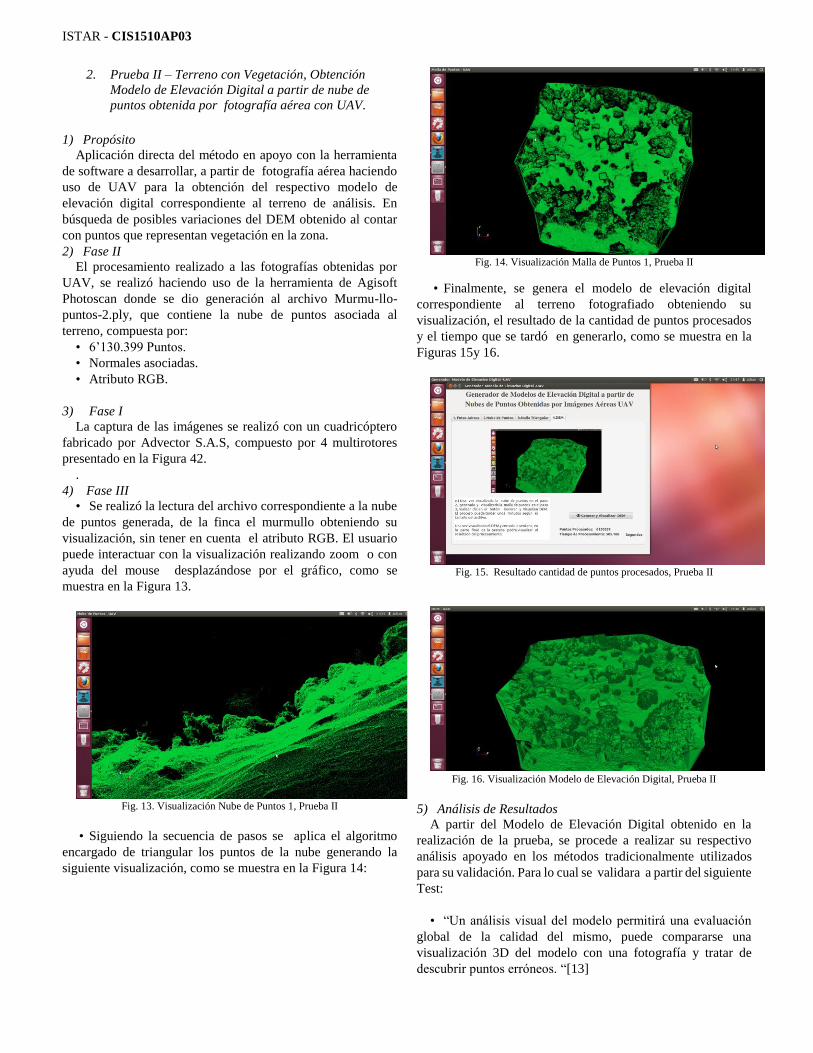
• Finalmente, se genera el modelo de elevación digital
correspondiente al terreno fotografiado obteniendo su
visualización, el resultado de la cantidad de puntos procesados
y el tiempo que se tardó en generarlo, como se muestra en la
Figuras 15y 16.
Fig. 15. Resultado cantidad de puntos procesados, Prueba II
Fig. 16. Visualización Modelo de Elevación Digital, Prueba II
5) Análisis de Resultados
A partir del Modelo de Elevación Digital obtenido en la
realización de la prueba, se procede a realizar su respectivo
análisis apoyado en los métodos tradicionalmente utilizados
para su validación. Para lo cual se validara a partir del siguiente
Test:
• “Un análisis visual del modelo permitirá una evaluación
global de la calidad del mismo, puede compararse una
visualización 3D del modelo con una fotografía y tratar de
descubrir puntos erróneos. “[13]

ISTAR - CIS1510AP03
Para el análisis visual del modelo de elevación digital
generado se ha realizado el anexo ( Plan de Pruebas), donde se
encuentra la comparación con las fotografías aéreas obtenidas
en el cual se observa con mayor detalle el análisis de los
resultados obtenidos.
VI. CONCLUSIONES
Las conclusiones generadas a partir del desarrollo de este
trabajo de grado y dando cumplimiento a los objetivos
planteados son los siguientes:
• Con el presente Trabajo de Grado se demostró que a partir
del uso de vehículos aéreos no tripulados existe una nueva
oportunidad para obtener información acerca de las
características topográficas de un terreno con mayor detalle a
partir de las fotografías de alta resolución obtenidas,
adicionando las ventajas que nos ofrecen estos equipos como lo
es el bajo costo de adquisición y la posibilidad de estudio en
zonas de difícil acceso.
• El desarrollo del Trabajo de Grado dando cumplimiento con
el objetivo general ha permitido diseñar un método para
generar modelos de elevación digital a partir de imágenes
capturadas desde vehículos aéreos no tripulados (UAV). En la
realización de las pruebas diseñadas se ha logrado la
representación de los valores altimétricos que describen la
topología de los terrenos de estudio.
• En el desarrollo del método propuesto en el Trabajo de
Grado, se ha demostrado que a partir del uso de cámaras
convencionales de alta resolución equipadas en UAVs se puede
obtener los valores altimétricos de un terreno generando la nube
de puntos asociada a las fotografías obtenidas, no solamente
con métodos tradicionales tales como estereoscopía, obtención
de curvas de nivel o fotografía aérea haciendo uso de vehículos
aéreos transportados.
• En el desarrollo del método propuesto para generar Modelos
de Elevación Digital a partir de imágenes capturadas desde
vehículos aéreos no tripulados (UAV), se ha implementado una
herramienta de software que permite la generación y
visualización del DEM, así como los productos intermedios
previos manejando criterios de usabilidad para el usuario final.
• Actualmente, los modelos de elevación digital que se
obtienen a partir de diferentes técnicas no aseguran la exactitud
de la topografía real del terreno, sin embargo se siguen
proponiendo diferentes alternativas que posibiliten la reducción
del error en la obtención de estos modelos.
VII. REFERENCIAS
[1] José Luis Asensio. Fernando Pérez, P. M. (2008). UAV Beneficios
& Límites.
[2] GARFEI. (2012). Producción Cartográfica con UAV's. Obtenido
de http://www.aeroproduccions.com/wp-
content/uploads/Produccion-cartografica-con-UAVs-
Aeroproduccions.pdf
[3] VTP. (2003). Digital Elevatión Data. Obtenido de
http://vterrain.org/Elevation
[4] I. Otero . (2001). Fotogrametría I.
[5] Zaira Peinado Checa, A. F. (2014). Combination of low cost terrestria
and aerial photogrammetry: three-dimensional survey of the church
of San Miguel in Ágreda (Soria) . VAR.
[6] Agisoft. (2015). Agisoft PhotoScan. Obtenido de
http://www.agisoft.com/
[7] Computing, G. C. (2015). Obtenido de http://www.cc.gatech.edu/
[8] Modelos matemáticos en ingeniería moderna. (2000) (p. 526). CDCH
UCV. Obtenido de https://books.google.com/books?id=ZrI_GumvqtQC&pgis=1
[9] Wu, C. (2003). VisualSFM : A Visual Structure from Motion System.
Obtenido de http://ccwu.me/vsfm/
[10] SA, P. (2015). Pix4D Simply Powerful. Obtenido de
https://pix4d.com
[11] Kolor. (2015). Obtenido de http://www.kolor.com/
[12] Sommerville, I. (2005). Ingeniería del software. Pearson.
[13] 2 Validación de un Modelo Digital de Elevaciones (2010). Obtenido de http://www.um.es/geograf/sigmur/temariohtml/node50_mn.html
Erick Julián Coral Crespo. Estudiante
de Ingeniería de Sistemas de la Pontificia
Universidad Javeriana, decimo semestre,
Bogotá, Colombia. Durante el pregrado
apoyo a la Facultad en la labor de monitor
de Pensamiento Algorítmico.