GEOMETRÍA +
219
PDF generado usando el kit de herramientas de fuente abierta mwlib. Ver http://code.pediapress.com/ para mayor información. PDF generated at: Mon, 09 Jul 2012 21:54:05 UTC GEOMETRÍA E SEMPRE +
Transcript of GEOMETRÍA +

PDF generado usando el kit de herramientas de fuente abierta mwlib. Ver http://code.pediapress.com/ para mayor información.PDF generated at: Mon, 09 Jul 2012 21:54:05 UTC
GEOMETRÍA E SEMPRE +
ContenidosArtículos
Parábola (matemática) 1Sección cónica 9Generatriz 12Cicloide 13Cálculo de variaciones 15Isoperimetría 18Teorema de Green 20Teorema de Stokes 21Teorema de la divergencia 23Divergencia (matemática) 25Gradiente 27Jacobiano 30Derivada parcial 33Geometría diferencial 36Fibrado 37Fibrado de Seifert 40Teoría de campo de gauge 41Grupo de Lie 46Teoría de categorías 50Análisis complejo 59Clase característica 61Derivada covariante 63Tensor de curvatura 67Teoría de la relatividad 72Álgebra multilineal 83Análisis funcional 85Sistema formal 86Geometría euclídea 88Geometría elíptica 92Ecuación de segundo grado 94Mediatriz 101Simetría axial 103Simetría radial (biología) 105Distancia focal 106
Distancia hiperfocal 107Lugar geométrico 108Paralelismo (matemática) 109Geometría afín 111Espacio afín 112Distancia 115Perpendicularidad 117Ángulo diedro 120Ángulos adyacentes 121Ángulos entre paralelas 122Teorema de Desargues 127Geometría proyectiva (Matemáticas) 128Teorema de Tales 131Geometría absoluta 137János Bolyai 137Congruencia (geometría) 138Ángulos complementarios 140Ángulos suplementarios 140Ángulos conjugados 141Ángulos consecutivos 142Translación 142Isometría 143Grupo uniparamétrico 144Grupo abeliano 145Espacio recubridor 146Teoría de nudos 147Espacio de Hausdorff 150Axiomas de separación 151Grupo de isometría 153Grupo puntual 155Grupo ortogonal 159Matriz ortogonal 160Isometría afín 162Matriz cuadrada 165Matriz invertible 166Matriz traspuesta 169Teoría de campos 170Matriz identidad 173

Paridad (física) 174Ortogonalidad (matemáticas) 179Cuaterniones y rotación en el espacio 181Cuaternión 183Sistema diédrico 190Elipse 194Cono (geometría) 203
ReferenciasFuentes y contribuyentes del artículo 207Fuentes de imagen, Licencias y contribuyentes 211
Licencias de artículosLicencia 215

Parábola (matemática) 1
Parábola (matemática)
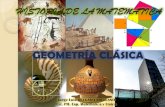
Secciones cónicas.
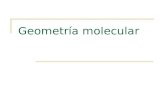
La trayectoria de una pelota que rebota es unasucesión de parábolas.
En matemática, la parábola (del griego παραβολή) es la seccióncónica resultante de cortar un cono recto con un plano paralelo a sugeneratriz.[1] Se define también como el lugar geométrico de lospuntos de un plano que equidistan de una recta (eje o directriz) y unpunto fijo llamado foco. En geometría proyectiva, la parábola se definecomo la curva envolvente de las rectas que unen pares de puntoshomólogos en una proyectividad semejante o semejanza.
La parábola aparece en muchas ramas de las ciencias aplicadas, debidoa que las gráficas de ecuaciones cuadráticas son parábolas. Porejemplo, la trayectoria ideal del movimiento de los cuerpos bajo lainfluencia de la gravedad (ver: movimiento parabólico y trayectoriabalística).
Historia
La tradición reza que las secciones cónicas fueron descubiertas porMenecmo en su estudio del problema de la duplicación del cubo,[2]
donde demuestra la existencia de una solución mediante el corte de unaparábola con una hipérbola, lo cual es confirmado posteriormente porProclo y Eratóstenes.[3]
Sin embargo, el primero en usar el término parábola fue Apolonio dePerge en su tratado Cónicas,[4] considerada obra cumbre sobre el temade las matemáticas griegas, y donde se desarrolla el estudio de las tangentes a secciones cónicas.
Si un cono es cortado por un plano a través de su eje, y también es cortado por otro plano que corte la base delcono en una línea recta perpendicular a la base del triángulo axial, y si adicionalmente el diámetro de lasección es paralelo a un lado del triángulo axial, entonces cualquier línea recta que se dibuje desde la secciónde un cono a su diámetro paralelo a la sección común del plano cortante y una de las bases del cono, será igualen cuadrado al rectángulo contenido por la línea recta cortada por ella en el diámetro que inicia del vértice dela sección y por otra línea recta que está en razón a la línea recta entre el ángulo del cono y el vértice de lasección que el cuadrado en la base del triángulo axial tiene al rectángulo contenido por los dos lados restantesdel triángulo. Y tal sección será llamada una parábola
Apolonio de PergeEs Apolonio quien menciona que un espejo parabólico refleja de forma paralela los rayos emitidos desde su foco,propiedad usada hoy en día en las antenas satelitales. La parábola también fue estudiada por Arquímedes,nuevamente en la búsqueda de una solución para un problema famoso: la cuadratura del círculo, dando comoresultado el libro Sobre la cuadratura de la parábola.
Parábola (matemática) 2
Propiedades geométricas
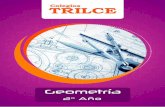
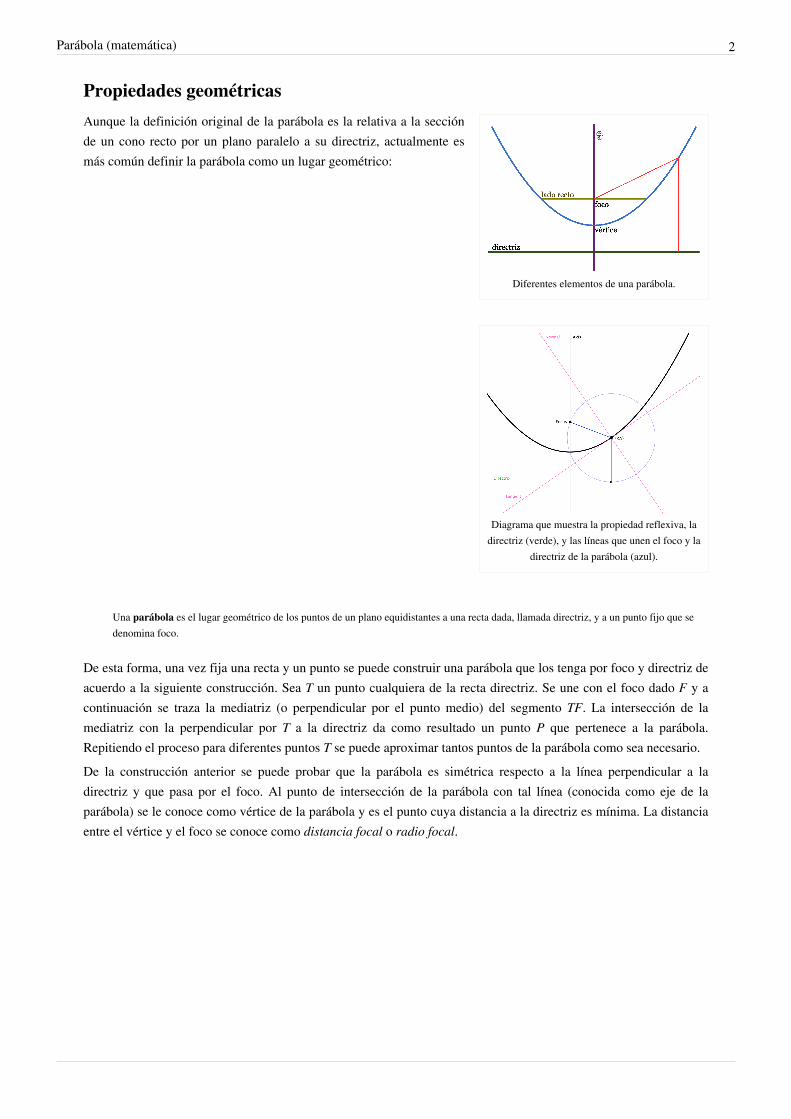
Diferentes elementos de una parábola.
Diagrama que muestra la propiedad reflexiva, ladirectriz (verde), y las líneas que unen el foco y la
directriz de la parábola (azul).
Aunque la definición original de la parábola es la relativa a la secciónde un cono recto por un plano paralelo a su directriz, actualmente esmás común definir la parábola como un lugar geométrico:
Una parábola es el lugar geométrico de los puntos de un plano equidistantes a una recta dada, llamada directriz, y a un punto fijo que sedenomina foco.
De esta forma, una vez fija una recta y un punto se puede construir una parábola que los tenga por foco y directriz deacuerdo a la siguiente construcción. Sea T un punto cualquiera de la recta directriz. Se une con el foco dado F y acontinuación se traza la mediatriz (o perpendicular por el punto medio) del segmento TF. La intersección de lamediatriz con la perpendicular por T a la directriz da como resultado un punto P que pertenece a la parábola.Repitiendo el proceso para diferentes puntos T se puede aproximar tantos puntos de la parábola como sea necesario.De la construcción anterior se puede probar que la parábola es simétrica respecto a la línea perpendicular a ladirectriz y que pasa por el foco. Al punto de intersección de la parábola con tal línea (conocida como eje de laparábola) se le conoce como vértice de la parábola y es el punto cuya distancia a la directriz es mínima. La distanciaentre el vértice y el foco se conoce como distancia focal o radio focal.

Parábola (matemática) 3
Los puntos de la parábola están a la mismadistancia del foco F y de la recta directriz. Construcción de puntos en una parábola.
Lado recto
El lado recto mide 4 veces la distancia focal
Al segmento de recta comprendido por la parábola, que pasa por elfoco y es paralelo a la directriz, se le conoce como lado recto.
La longitud del lado recto es siempre 4 veces la distancia focal.
Siendo D, E los extremos del lado recto y T, U las respectivas proyecciones sobre la directriz, denotando por W laproyección del foco F sobre la directriz, se observa que FEUW y DFWT son cuadrados, y sus lados miden FW=2FV.Por tanto el segmento DE es igual a 4 veces el segmento FV (la distancia focal).Las tangentes a la parábola que pasan por los extremos del lado recto forman ángulos de 45° con el mismo,consecuencia de que FEUW y DFWT sean cuadrados, junto con la construcción mencionada en la sección anterior.Además, tales tangentes se cortan en la directriz de forma perpendicular, precisamente en el punto de proyección Wdel foco, propiedades que pueden ser aprovechadas para construir una aproximación geométrica del foco y ladirectriz cuando éstos son desconocidos.

Parábola (matemática) 4
Semejanza de todas las parábolas
Todas las parábolas son semejantes, esúnicamente la escala la que crea la apariencia de
que tienen formas diferentes.
Dado que la parábola es una sección cónica, también puede describirsecomo la única sección cónica que tiene excentricidad . Launicidad se refiere a que todas las parábolas son semejantes, es decir,tienen la misma forma, salvo su escala.
Desafortunadamente, al estudiar analíticamente las parábolas(basándose en ecuaciones), se suele afirmar erróneamente que losparámetros de la ecuación cambian la forma de la parábola, haciéndolamás ancha o estrecha. La verdad es que todas las parábolas tienen lamisma forma, pero la escala (zoom) crea la ilusión de que hayparábolas de formas diferentes.Un argumento geométrico informal es que al ser la directriz una recta infinita, al tomar cualquier punto y efectuar laconstrucción descrita arriba, se obtiene siempre la misma curva, salvo su escala, que depende de la distancia delpunto a la directriz.
Tangentes a la parábola
La tangente biseca el ángulo entre el foco, elpunto de tangencia y su proyección.
Uso de las propiedades de las tangentes paraconstruir una parábola mediante dobleces en
papel.
Un resultado importante en relación a las tangentes de una parábolaestablece:
La tangente biseca el ángulo entre el foco, el punto de tangencia y su proyección.
En lo sucesivo, F denotará el foco de una parábola, P un punto de la misma y T su proyección sobre la directriz. Retomando la construcción dada para encontrar puntos de una parábola, sea MP la mediatriz del triángulo FPT, el cual es isósceles y por tanto biseca al ángulo FPT. Lo único que hay que verificar ahora es que MP también es la

Parábola (matemática) 5
tangente en el punto P. Sea Q otro punto de la parábola y sea U su proyección en la directriz.Puesto que FQ=QU y QU<QT, entonces FQ<QT. Dado que esto es cierto para cualquier otro punto de la parábola,se concluye que toda la parábola está de un mismo lado de MP, y como la desigualdad es estricta, no hay otro puntode la parábola que toque a la recta MP, esto quiere decir que MP es la tangente de la parábola en P.
Aplicaciones prácticasUna consecuencia de gran importancia es que la tangente refleja los rayos paralelos al eje de la parábola en direcciónal foco. Las aplicaciones prácticas son muchas: las antenas satelitales y radiotelescopios aprovechan el principioconcentrando señales recibidas desde un emisor lejano en un receptor colocado en la posición del foco.La concentración de la radiación solar en un punto, mediante un reflector parabólico tiene su aplicación en pequeñascocinas solares y grandes centrales captadoras de energía solar.Análogamente, una fuente emisora situada en el foco, enviará un haz de rayos paralelos al eje: diversas lámparas yfaros tienen espejos con superficies parabólicas reflectantes para poder enviar haces de luz paralelos emanados deuna fuente en posición focal. Los rayos convergen o divergen si el emisor se desplaza de la posición focal.
La parábola refleja sobre el focolos rayos paralelos al eje.Análogamente, un emisor
situado en el foco, enviará unhaz de rayos paralelos al eje.
Los radiotelescopiosconcentran los haces deseñales en un receptorsituado en el foco. El
mismo principio se aplicaen una antena de radar.
Cocina solar de concentradorparabólico. El mismo método seemplea en las grandes centrales
captadoras de energía solar.
Los faros de los automóvilesenvían haces de luz paralelos, sila bombilla se sitúa en el foco de
una superficie parabólica.
Ecuaciones de la parábola
Parábolas tipo y=ax2, con a=4, 1, 1/4 y 1/10.
Con el advenimiento de la geometría analítica se inició un estudio delas formas geométricas basado en ecuaciones y coordenadas.
Una parábola cuyo vértice está en el origen y su eje coincide con el ejede las ordenadas, tiene una ecuación de la forma y=ax2 donde elparámetro a especifica la escala de la parábola, incorrectamentedescrita como la forma de la parábola, ya que como se dijo antes, todaslas parábolas tienen la misma forma. Cuando el parámetro es positivo,la parábola se abre «hacia arriba» y cuando es negativo se abre «haciaabajo».
Si bien, la expresión en forma de ecuación no fue posible hasta eldesarrollo de la geometría analítica, la relación geométrica expresada en la ecuación anterior ya estaba presente enlos trabajos de Apolonio,[2] y se bosquejará a continuación usando notación moderna.

Parábola (matemática) 6
Prueba geométrica de la relación y=ax2.
Tomando nuevamente la definición de parábola como sección de uncono recto de forma paralela a la directriz, sea V un punto en el eje ysea QV perpendicular al eje. (QV corresponde al valor x en la versiónanalítica y PV al valor y). Considerando la sección circular que pasapor Q y es paralela a la base del cono, obtenemos H, K paralelos a B yC.
Por el teorema de potencia de un punto:
.Al ser PM paralela a AC, los triángulos HVP, HKA y BCA sonsemejantes y así:
.
Usando nuevamente los paralelismos:
.
Despejando HV y VK para sustituir en la fórmula de QV² resulta en
.
Pero el valor de es una constante pues no depende de la posición de V, por lo que haciendo
arroja la expresión moderna y=ax².
Parábolas verticales, con ecuaciones de la formay=ax²+bx+c.
Aplicando una sustitución de coordenadas podemos obtener ahora laecuación de una parábola vertical para cualquier posición de su vértice.
La ecuación de una parábola cuyo eje es vertical y su vértice es (u,v) tiene la forma (y-v)=a(x-u)2,
agrupando los términos y reordenando se obtiene una forma equivalente:

Parábola (matemática) 7
La ecuación de una parábola cuyo eje es vertical es de la forma .
Si la parábola es horizontal, se obtienen ecuaciones similares pero intercambiando y por x y viceversa. Asítendríamos:
La ecuación de una parábola cuyo eje es horizontal es de la forma .
Ecuación involucrando la distancia focal
Ecuación de una parábola vertical.
Pueden haber muchas parábolas que tengan un mismo vértice(variando el parámetro a) en la primera ecuación. Sin embargo, dadosdos puntos fijos, existe sólo una parábola que los tiene por vértice yfoco ya que la directriz queda automáticamente fija como laperpendicular a la línea que une el foco con el vértice y a esa mismadistancia del último.
Consideremos el caso especial en que el vértice es (0,0) y el foco es(0,p). La directriz es por tanto, la recta horizontal que pasa por (0,-p).A la distancia entre el vértice y el foco se le llama distancia focal, demodo que en este caso la distancia focal es igual a p. Con estaconfiguración se tiene:
La ecuación de una parábola con vértice en (0,0) y foco en (0,p) es .
De forma alterna:
La ecuación de una parábola con vértice en (0,0) y foco en (0,p) es .
Es de notar que el coeficiente 4p es precisamente la longitud del lado recto de la parábola.Ambas ecuaciones se refieren a parábolas verticales que se abren «hacia arriba». La ecuación de una parábola que seabre hacia abajo es similar excepto que varía un signo. En este caso, el foco sería (0,-p) y de esta forma:
La ecuación de una parábola con vértice en (0,0) y foco en (0,-p) es .
Cuando la parábola es horizontal «hacia la derecha», se obtiene una ecuación similar intercambiando los roles de x, y:
La ecuación de una parábola con vértice en (0,0) y foco en (p,0) es ,
obteniendo mediante un cambio de signo la ecuación de las parábolas hacia la izquierda.Finalmente, las ecuaciones cuando el vértice no está en el centro se obtienen mediante una traslación. En el casocomún de la parábola vertical hacia arriba se tiene
La ecuación de una parábola con vértice en (h, k) y foco en (h, k+p) es ,
mientras que para la parábola horizontal se intercambia x con y:.
La ecuación de una parábola con vértice en (h, k) y foco en (h+p, k) es .

Parábola (matemática) 8
Ecuación general de una parábolaHasta ahora se han descrito parábolas con sus ejes paralelos a alguno de los ejes de coordenadas. De esta forma lasfórmulas son funciones de x ó de y. Pero una parábola puede tener su eje inclinado con respecto a un par de ejes decoordenadas ortogonales.
La expresión algebraica que describe una parábola que ocupe cualquier posición en un plano es:
si y sólo si
y los coeficientes a y c no pueden ser simultáneamente nulos
Mediante traslaciones y rotaciones es posible hallar un sistema de referencia en el que la ecuación anterior se expresemediante una fórmula algebraica de la forma
, donde a es distinto de cero.
Referencias[1] Si el ángulo que forma el plano de intersección con el eje de revolución (o directriz), es mayor que el comprendido entre dicho eje y la
generatriz, entonces la intersección será una elipse. Será una hipérbola si dicho ángulo es menor al citado, y una circunferencia si el plano esperpendicular a la directriz o eje del cono.
[2] Heath, Sir Thomas (1921) (en inglés). A history of Greek Mathematics vol. 1. Londres, Inglaterra: Oxford University Press. OCLC 2014918(http:/ / worldcat. org/ oclc/ 2014918).
[3] Ken Schmarge. « Conic Sections in Ancient Greece (http:/ / www. math. rutgers. edu/ ~cherlin/ History/ Papers1999/ schmarge. html)» (eninglés). Consultado el 02-06-2008 de 2008.
[4] J. J. O'Connor y E. F. Robertson. « Apollonius of Perga (http:/ / www-history. mcs. st-andrews. ac. uk/ Biographies/ Apollonius. html)» (eninglés). Consultado el 02-06-2008.
Enlaces externos• Wikimedia Commons alberga contenido multimedia sobre Parábola. Commons• Wikisource en inglés contiene el artículo de la Encyclopædia Britannica de 1911 sobre Parabola.Wikisource• Animación de un plan seccionando un cono y determinando la curva cónica parábola. (http:/ / www. stefanelli.
eng. br/ webpage/ es_parabola. html)• Apollonius' Derivation of the Parabola (http:/ / mathdl. maa. org/ convergence/ 1/ ?pa=content&
sa=viewDocument& nodeId=196& bodyId=202) at Convergence (http:/ / mathdl. maa. org/ convergence/ 1/ )• Weisstein, Eric W. « Parábola (http:/ / mathworld. wolfram. com/ Parabola. html)» (en inglés). MathWorld.
Wolfram Research.• Interactive parabola-drag focus, see axis of symmetry, directrix, standard and vertex forms (http:/ / www.
mathwarehouse. com/ quadratic/ parabola/ interactive-parabola. php)• Archimedes Triangle and Squaring of Parabola (http:/ / www. cut-the-knot. org/ Curriculum/ Geometry/
ArchimedesTriangle. shtml) at Cut-the-Knot• Two Tangents to Parabola (http:/ / www. cut-the-knot. org/ Curriculum/ Geometry/ ParabolaLambert. shtml) at
Cut-the-Knot• Parabola As Envelope of Straight Lines (http:/ / www. cut-the-knot. org/ Curriculum/ Geometry/
ParabolaEnvelope. shtml) at Cut-the-Knot• Parabolic Mirror (http:/ / www. cut-the-knot. org/ Curriculum/ Geometry/ ParabolaMirror. shtml) at Cut-the-Knot• Three Parabola Tangents (http:/ / www. cut-the-knot. org/ Curriculum/ Geometry/ ThreeParabolaTangents. shtml)
at Cut-the-Knot• Module for the Tangent Parabola (http:/ / math. fullerton. edu/ mathews/ n2003/ TangentParabolaMod. html)

Parábola (matemática) 9
• Focal Properties of Parabola (http:/ / www. cut-the-knot. org/ Curriculum/ Geometry/ ParabolaFocal. shtml) atCut-the-Knot
• Parabola As Envelope II (http:/ / www. cut-the-knot. org/ Curriculum/ Geometry/ ParabolaMesh. shtml) atCut-the-Knot
• The similarity of parabola (http:/ / math. kennesaw. edu/ ~mdevilli/ similarparabola. html) at Dynamic GeometrySketches (http:/ / math. kennesaw. edu/ ~mdevilli/ JavaGSPLinks. htm)
• Un método para dibujar una parábola con una cuerda y tachuelas (http:/ / www. maverickexperiments. com/DrawConicSections/ parabola. html)
Sección cónica
Los cuatro ejemplos de intersección de un plano con uncono: parábola (1), elipse y circunferencia (2) e hiperbola
(3).
Se denomina sección cónica (o simplemente cónica) a todaslas curvas intersección entre un cono y un plano; si dichoplano no pasa por el vértice, se obtienen las cónicaspropiamente dichas. Se clasifican en tres tipos: elipse,parábola e hipérbola. un cono circular recto de dos hojas conun plano que no pasa por su vértice.
Etimología
La primera definición conocida de sección cónica surge en laAntigua Grecia, cerca del año 1000 (Menæchmus) donde lasdefinieron como secciones «de un cono circular recto».[1] Losnombres de hipérbola, parábola y elipse se deben a Apoloniode Perge. Actualmente, las secciones cónicas pueden definirse de varias maneras; estas definiciones provienen de lasdiversas ramas de la matemática: como la geometría analítica, la geometría proyectiva, etc.
Tipos
Perspectiva de las secciones cónicas.
En función de la relación existente entre el ángulo de conicidad (α) y lainclinación del plano respecto del eje del cono (β), pueden obtenersediferentes secciones cónicas, a saber:• β < α : Hipérbola (naranja)• β = α : Parábola (azulado)• β > α : Elipse (verde)• β = 90º: Circunferencia (un caso particular de elipse) (rojo)Si el plano pasa por el vértice del cono, se puede comprobar que:• Cuando β > α la intersección es un único punto (el vértice).• Cuando β = α la intersección es una recta generatriz del cono (el
plano será tangente al cono).• Cuando β < α la intersección vendrá dada por dos rectas que se cortan en el vértice.•• cuando β = 90º El ángulo formado por las rectas irá aumentando a medida β disminuye, hasta alcanzar el máximo
(α) cuando el plano contenga al eje del cono (β = 0).

Sección cónica 10
Las cuatro secciones cónicas en el plano.
Expresión algebraica
Partiendo de una circunferencia (e=0), al aumentar laexcentricidad se obtienen elipses, parábolas e hipérbolas.
En coordenadas cartesianas, las cónicas se expresan en formaalgebraica mediante ecuaciones cuadráticas de dos variables(x,y) de la forma:
en la que, en función de los valores de los parámetros, setendrá:
h² > ab: hipérbola.h² = ab: parábola.h² < ab: elipse.a = b y h = 0: circunferencia.
Características
La elipse es el lugar geométrico de los puntos del plano talesque la suma de las distancias a dos puntos fijos llamados focoses constante.
Además de los focos F y F´, en una elipse destacan los siguientes elementos:•• Centro, O•• Eje mayor, AA´•• Eje menor, BB´•• Distancia focal, OF
La elipse con centro (0, 0) tiene la siguiente expresión algebraica:
La hipérbola es el lugar geométrico de los puntos del plano cuya diferencia de distancias a dos puntos fijos,llamados focos, es constante y menor que la distancia entre los focos.Tiene dos asíntotas (rectas cuyas distancias a la curva tienden a cero cuando la curva se aleja hacia el infinito). Lashipérbolas cuyas asíntotas son perpendiculares se llaman hipérbolas equiláteras.Además de los focos y de las asíntotas, en la hipérbola destacan los siguientes elementos:•• Centro, O•• Vértices, A y A

Sección cónica 11
•• Distancia entre los vértices•• Distancia entre los focos
La ecuación de una hipérbola con centro (0, 0), es:
La parábola es el lugar geométrico de los puntos del plano que equidistan de un punto fijo llamado foco, y de unarecta llamada directriz.Además del foco, F, y de la directriz, d, en una parábola destacan los siguientes elementos:•• Eje, e•• Vértice, V•• Distancia de F a d, p.Una parábola, cuyo vértice está en el origen y su eje coincide con el de ordenadas, tiene la siguiente ecuación:
AplicacionesLas curvas cónicas son importantes en astronomía: dos cuerpos masivos que interactúan según la ley de gravitaciónuniversal, sus trayectorias describen secciones cónicas si su centro de masa se considera en reposo. Si estánrelativamente próximas describirán elipses, si se alejan demasiado describirán hipérbolas o parábolas.También son importantes en aerodinámica y en su aplicación industrial, ya que permiten ser repetidas por mediosmecánicos con gran exactitud, logrando superficies, formas y curvas perfectas.
Notas[1] Oswald Veblen, John Wesley Young, Proyective Geometry, vol I, Ginn & Co. Ed. (1910)
Enlaces externos• Curvas cónicas en laslaminas.es (http:/ / www. laslaminas. es/ geometria-plana/ curvas-conicas) (14/5/12)
• Wikimedia Commons alberga contenido multimedia sobre secciones cónicas. Commons• Cónicas en wmatem.eis.uva.es (http:/ / wmatem. eis. uva. es/ ~matpag/ CONTENIDOS/ Conicas/ marco_conicas.
htm)

Generatriz 12
GeneratrizLa generatriz[1] es una línea que a causa de su movimiento conforma una figura geométrica, que a su vez dependede la directriz. La generatriz puede ser una línea recta o curva.[2]
Si la generatriz es una línea recta que gira respecto de otra recta directriz, llamada eje de rotación, conformará unasuperficie cónica, cilíndrica, etc. Si la generatriz es una curva, genera esferas, elipsoides, etc. Si se desplaza sobreuna o más directrices, genera una superficie reglada.La generatriz puede ser una línea curva, por ejemplo, una circunferencia que rueda sobre otra circunferenciadirectriz, tangencialmente. Un punto vinculado a ella describe una trayectora curva que se denomina ruleta cicloidal.
En la figura, la circunferencia de color azul es la directriz, y lacircunferencia de color negro es la generatriz. Un punto vinculado aella describe una forma llamada epitrocoide: la curva de color rojo.
Curvas conformadas porcircunferencias generatrices
• Cicloide, la curva plana generada por un punto deuna circunferencia generatriz al rodar sobre unalínea recta, sin deslizarse.
• Epicicloide, la curva que describe un puntovinculado a una circunferencia generatriz querueda –sin deslizamiento– sobre una circunferenciadirectriz, tangencialmente.
• Hipocicloide, la curva que describe la trayectoriaun punto situado sobre una circunferenciageneratriz que rueda por el interior de otracircunferencia directriz, sin deslizamiento.
• Trocoide, la curva plana que describe un punto,vinculado a una circunferencia generatriz, querueda sobre una línea recta directriz,tangencialmente, sin deslizamiento.
• Epitrocoide, la curva que describe un puntovinculado a una circunferencia generatriz que rueda –sin deslizamiento– sobre una circunferencia directriz,tangencialmente.
• Hipotrocoide, la curva plana que describe un punto vinculado a una circunferencia generatriz que rueda dentrode una circunferencia directriz, tangencialmente, sin deslizamiento.
Generatriz del cilindroEl cilindro es un cuerpo de revolución engendrado por un rectángulo al girar en torno a uno de sus lados. La alturadel cilindro coincide con la longitud del lado sobre el que gira el cilindro. El otro lado opuesto al contenido en el eleje de giro, se llama línea generatriz y su longitud coincide con la de la altura del cilindro.
Generatriz del conoEl cono es un cuerpo de revolución engendrado por un triángulo rectángulo al girar en torno a uno de sus catetos,que será la altura del cono y la hipotenusa será la generatriz. Por el teorema de Pitágoras la longitud de la generatrizg del cono será igual a:

Generatriz 13
donde h es la altura del cono y r el radio de su base.
Generatriz del tronco de conoEl tronco de cono es un cuerpo de revolución se ha engendrado por un trapecio rectángulo al girar en torno al ladoperpendicular a las bases, que será la altura del cono y el otro lado será la generatriz.Obtenemos la generatriz del tronco de cono aplicando el teorema de Pitágoras en el triángulo sombreado:g²=h²+(R-r)²
Referencias[1][1] Diccionario de la lengua española, de la Real Academia Española - Vigésima segunda edición.[2] Taibo Fernández, Ángel. Geometría descriptiva y sus aplicaciones. Publicado por Editorial Tebar (1983).
CicloideUna cicloide es una curva generada por un punto perteneciente a unacircunferencia generatriz al rodar sobre una línea recta directriz, sindeslizarse.
Historia
La cicloide fue estudiada por primera vez por Nicolás de Cusa y, posteriormente, por Mersenne (monje, amigo deDescartes). Galileo en el año 1599 estudió la curva y fue el primero en darle el nombre con la que la conocemos.Galileo intentó averiguar el área de esta curva sumando diferentes segmentos rectos situados sobre la misma,mediante aproximación. Algunos años después, en 1634, G.P. de Roberval mostró que el área de la región de unbucle de cicloide era tres veces el área correspondiente a la circunferencia que la genera. En 1658, Christopher Wrendemostró que la longitud de la cicloide es igual a cuatro veces el diámetro de la circunferencia generatriz.
En 1696 el matemático Johann Bernoulli anunció a la comunidad matemática la solución al problema de labraquistocrona (curva que sigue el descenso más rápido cuando existe gravedad y que es objeto de estudio en elcálculo de variaciones), mostrando que la solución era una cicloide. Leibniz, Newton, Jakob Bernoulli y Guillaumede l'Hôpital, encontraron la solución del problema enunciado por Bernoulli. La cicloide se emplea para resolver elproblema tautocrono (Descubierto por Christian Huygens), en el que si despreciamos el rozamiento y siinvirtiésemos una cicloide dejando caer un objeto por la misma, por ejemplo una bola, ésta llegará a la parte másbaja de la curva en un intervalo de tiempo que no depende del punto de partida.Entre las demostraciones acerca de sus propiedades se encuentra el matemático René Descartes que obtuvo mediantedemostraciones efectivas y elegantes la fórmula de la recta tangente en un punto cualquiera del arco de la cicloide,empleando técnicas que después desarrollaría como la ciencia de la geometría diferencial.A causa de las continuas disputas entre los matemáticos del siglo XVII la cicloide ha sido denominada "La Elena delos Geómetras", aunque existen opiniones que mencionan esta denominación poética hacia las bellas propiedades deesta curva. Sus propiedades atraen a los matemáticos de la época. En el año 1658 Blaise Pascal lanza un desafío a losmatemáticos proponiendo determinar la longitud de un arco de la cicloide así como su centro de gravedad y lasuperficie del volumen de revolución que engendra el área plana que barre el arco de cicloide al girar, ya sea en tornoal eje de las abcisas, o en torno al eje de las ordenadas, o bien, en torno al eje de simetría del arco de cicloide. Fueronmuchos los esfuerzos realizados en el siglo XVII para tratar de comprender esta curva y sus propiedades, tantogeométricas como físicas, que han permitido desarrollar un gran número de aplicaciones industriales.

Cicloide 14
Ecuaciones
Ecuación paramétricaSi la cicloide se genera mediante una circunferencia de radio a que se apoya sobre el eje de abscisas en el origen, sudescripción en forma paramétrica viene dada por:
donde t es un parámetro real. Siendo la variable y función de la variable x, esta cicloide tiene un período de 2a , yuna altura de 2a.
Ecuación cartesianaSi se despeja la variable t en la ecuación paramétrica, se obtendrá la forma cartesiana:
,
donde el único parámetro de forma es el radio a de la circunferencia generatriz. Esta fórmula es válida para lavariable y en el intervalo [0,2a], y proporciona sólo la mitad del primer bucle de la cicloide.Si se desea emplear el n-ésimo semi-bucle de la cicliode, se puede utilizar la siguiente ecuación:
Ecuación intrínsecaLa ecuación en forma intrínseca es:
Donde igualmente representa el radio de la curva es la abscisa curvilínea.
Tipos de cicloideDependiendo de donde se encuentra P respecto de la circunferencia generatriz, se denomina:• cicloide acortada, si P se encuentra dentro de la circunferencia generatriz, (b < a),•• cicloide común, si P pertenece a la circunferencia generatriz, (a = b),• cicloide alargada, si P está fuera de la circunferencia generatriz, (b > a).Donde la circunferencia tiene radio a, y la distancia del centro al punto P es b.
UsosEn el diseño de los dientes de los engranajes se emplean curvas cicloides (así lo propuso Gérard Desargues en el año1630). En Física se puede ver que un péndulo que tenga por límites una curva cicloide es isócrono y el centro degravedad del péndulo describe a su vez una cicloide.Un uso practico es el diseño de ciertos toboganes. Los hechos con forma de cicloide se utilizaron en la industriaaeronaútica, pues se requería una forma apropiada de salir deslizándose desde un avión en caso de emergencia.

Cicloide 15
Referencias• Curvas en la Historia, Volumen I, José Manuel Álvarez, Ed. Nivola ciencia abierta 12, 2006.• A Catalog of Special Plane Curces, J. Dennis Lawrence, with 98 Ilustrations, Dover Publications, New York.
1972. (Capítulo 7 Trascendental Curves).
Enlaces externos=• Curvas Técnicas y Cíclicas por Jose Antonio Cuadrado (http:/ / palmera. pntic. mec. es/ ~jcuadr2/ ciclicas/ index.
html) (15/5/12)
• Weisstein, Eric W. « Cycloid (http:/ / mathworld. wolfram. com/ Cycloid. html)» (en inglés). MathWorld.Wolfram Research.
• "La garra del león": pormenorizado relato de la resolución de la braquistócrona por Newton (http:/ / axxon. com.ar/ rev/ 127/ c-127Divulgacion. htm)
• Cicloides y trocoides, en temasmatematicos (http:/ / temasmatematicos. uniandes. edu. co/ Trocoides/ paginas/introduccion. htm)
• Cicloides y trocoides, en cfnavarra (http:/ / docentes. educacion. navarra. es/ ~msadaall/ geogebra/ trocoides. htm)
Cálculo de variacionesEl cálculo de variaciones es un problema matemático consistente en buscar máximos y mínimos (o másgeneralmente extremos relativos) de funcionales continuos definidos sobre algún espacio funcional. Constituyen unageneralización del cálculo elemental de máximos y mínimos de funciones reales de una variable.
HistoriaEl cálculo de variaciones se desarrolló a partir del problema de la curva braquistócrona, planteado inicialmente porJohann Bernoulli (1696). Inmediatamente este problema captó la atención de Jakob Bernoulli y el Marqués deL'Hôpital, aunque fue Leonhard Euler el primero que elaboró una teoría del cálculo variacional. Las contribucionesde Euler se iniciaron en 1733 con su Elementa Calculi Variationum ('Elementos del cálculo de variaciones') que danombre a la disciplina.Lagrange contribuyó extensamente a la teoría y Legendre (1786) asentó un método, no enteramente satisfactorio paradistinguir entre máximos y mínimos. Isaac Newton y Gottfried Leibniz también prestaron atención a este asunto.[1]
Otros trabajos destacados fueron los de Vincenzo Brunacci (1810), Carl Friedrich Gauss (1829), Siméon Poisson(1831), Mijaíl Ostrogradski (1834) y Carl Jacobi (1837). Un trabajo general particularmente importante es el deSarrus (1842) que fue resumido por Cauchy (1844). Otros trabajos destacados posteriores son los de Strauch (1849),Jellett (1850), Otto Hesse (1857), Alfred Clebsch (1858) y Carll (1885), aunque quizá el más importante de lostrabajos durante el siglo XIX es el de Weierstrass. Este importante trabajo fue una referencia estándar y es el primeroque trata el cálculo de variaciones sobre una base firme y rigurosa. Los problema 20 y 23 de Hilbert planteados en1900 estimularon algunos desarrollos posteriores.[1] Durante el siglo XX, David Hilbert, Emmy Noether, LeonidaTonelli, Henri Lebesgue y Jacques Hadamard, entre otros, hicieron contribuciones notables.[1] Marston Morse aplicóel cálculo de variaciones a lo que actualmente se conoce como teoría de Morse[2]. Lev Pontryagin, Ralph Rockafellary Clarke desarrollaron nuevas herramientas matemáticas dentro de la teoría del control óptimo, generalizando elcálculo de variaciones.[2]

Cálculo de variaciones 16
Problema Isoperimétrico¿Cuál es el área máxima A que puede rodearse con una curva de longitud L dada? Si no existen restriccionesadicionales, pudiendo la solución resulta ser:
Que es el valor que se obitiene para un círculo de radio R = L/2π.Si se imponen restricciones adicionales la solución es diferente por ejemplo, si se considera que L se considera sobreuna función f(x) y los extremos de las curva están sobre los puntos donde la distanciaentre ellos está dada. Es decir . El problema de hallar una curva que maximice el área entre ella y el eje xsería, hallar una función de modo que:
con las restricciones:
BraquistócronaEl problema de la curva braquistócrona se remonta a J. Bernoulli (1696). Se refiere a encontrar una curva en el planocartesiano que vaya del punto al origen de modo que un punto material que se desliza sin fricciónsobre ella tarda el menor tiempo posible en ir de al origen. Usando principios de mecánica clásica el problemapuede formularse como,
donde g es la gravedad y las restricciones son, , . Hay que notar que en existe unasingularidad.
Formulación generalUno de los problemas típicos en cálculo diferencial es el de encontrar el valor de para el cual la función alcanza un valor extremo (máximo o mínimo). En el cálculo de variaciones el problema es encontrar una función
para la cual un funcional alcance un valor extremo. El funcional está compuesto por una integralque depende de , de la función y algunas de sus derivadas.
(1a)
Donde la función pertenece a algún espacio de funciones (espacio de Banach, espacio de Hilbert), y tanto ellacomo sus derivadas pueden tener restricciones. Esta fórmula integral puede ser más complicada permitiendo a serun vector, y por lo tanto incluyendo derivadas parciales para :
(1b)

Cálculo de variaciones 17
Espacios funcionalesLa fundamentación rigurosa del cálculo de variaciones requiere considerar variedades diferenciales lineales dedimensión infinita. De hecho el punto de partida del cálculo de variaciones es un teorema de análisis funcional queprueba que es posible considerar una curva en un espacio funcional (e.g. trayectoria en el espacio fásico)simplemente como una función con una variable adicional, concretamente:[3]
La categoría formada por espacios vectoriales convenientes y funciones suaves entre ellos es cerrada por el producto cartesiano, de talmanera que se tiene la siguiente biyección natural:
donde son espacios vectoriles convenientes y la biyección anterior es un difeomorfismo.
El teorema anterior puede aplicarse por ejemplo al principio de mínima acción donde trata de encontrarse latrayectoria posible en el espacio de fases que hace mínima la integral de acción. Dicha trayectoria es una curva suaveen el espacio de trayectorias E, considerando ahora:
Se tiene que el problema de minimización puede reducirse a minimizar una cierta función real f de variable real:
Extremos relativos débiles y fuertesUn problema variacional requiere que el funcional esté definido sobre un espacio de Banach adecuado.La norma vectorial de dicho espacio es lo que permite definir rigurosamente si una solución es un mínimo o unmáximo relativo. Por ejemplo una función es un mínimo relativo si existe un cierto tal que, para todafunción se cumpla que:
Referencias[1] The Calculus of Variations. Springer. 2004. ISBN 0-387-40247-0.[2] [ |Ferguson, James (http:/ / arxiv. org/ find/ math/ 1/ au:+ Ferguson_J/ 0/ 1/ 0/ all/ 0/ 1)] (2004). «Brief Survey of the History of the Calculus
of Variations and its Applications». arXiv: arXiv:math/0402357 (http:/ / arxiv. org/ abs/ arXiv:math/ 0402357).[3][3] A. Kriegl y P. Michor, 1989, p. 3
Bibilografía• A. Kriegl y P. W. Michor: "Aspects of the theory of inifinite dimensional manifolds" (http:/ / www. mat. univie.
ac. at/ ~michor/ aspects. pdf), Differential Geometry and its Applications, 1, 1991, pp. 159-176.
Isoperimetría 18
IsoperimetríaIsoperimetría significa literalmente "con un perímetro igual". En matemática, la isoperimetría es el estudio generalde las figuras geométricas que tienen contornos iguales.
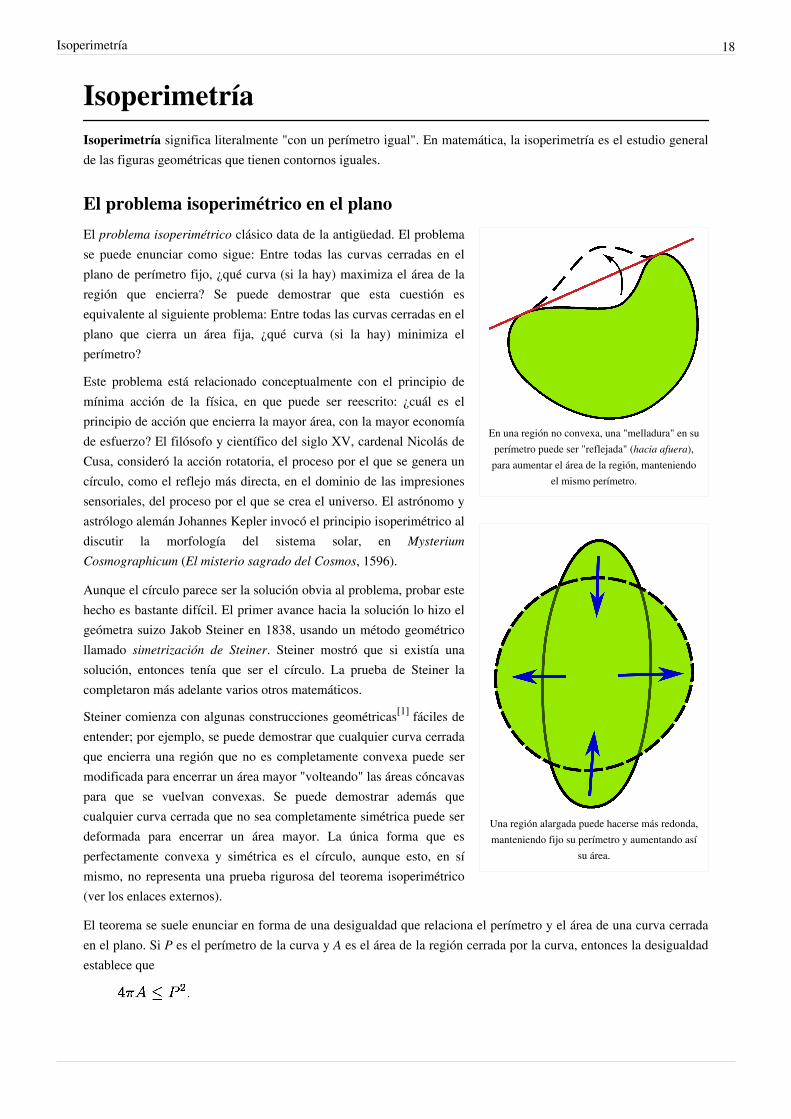
El problema isoperimétrico en el plano
En una región no convexa, una "melladura" en superímetro puede ser "reflejada" (hacia afuera),para aumentar el área de la región, manteniendo
el mismo perímetro.
Una región alargada puede hacerse más redonda,manteniendo fijo su perímetro y aumentando así
su área.
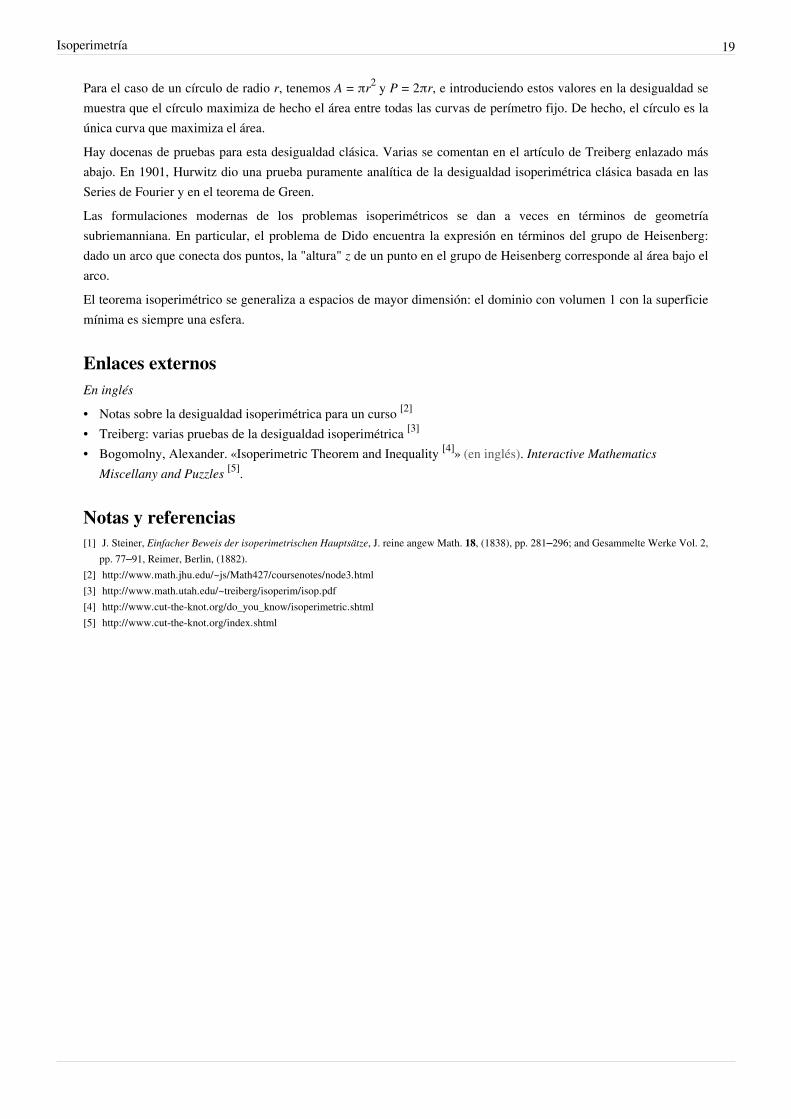
El problema isoperimétrico clásico data de la antigüedad. El problemase puede enunciar como sigue: Entre todas las curvas cerradas en elplano de perímetro fijo, ¿qué curva (si la hay) maximiza el área de laregión que encierra? Se puede demostrar que esta cuestión esequivalente al siguiente problema: Entre todas las curvas cerradas en elplano que cierra un área fija, ¿qué curva (si la hay) minimiza elperímetro?
Este problema está relacionado conceptualmente con el principio demínima acción de la física, en que puede ser reescrito: ¿cuál es elprincipio de acción que encierra la mayor área, con la mayor economíade esfuerzo? El filósofo y científico del siglo XV, cardenal Nicolás deCusa, consideró la acción rotatoria, el proceso por el que se genera uncírculo, como el reflejo más directa, en el dominio de las impresionessensoriales, del proceso por el que se crea el universo. El astrónomo yastrólogo alemán Johannes Kepler invocó el principio isoperimétrico aldiscutir la morfología del sistema solar, en MysteriumCosmographicum (El misterio sagrado del Cosmos, 1596).
Aunque el círculo parece ser la solución obvia al problema, probar estehecho es bastante difícil. El primer avance hacia la solución lo hizo elgeómetra suizo Jakob Steiner en 1838, usando un método geométricollamado simetrización de Steiner. Steiner mostró que si existía unasolución, entonces tenía que ser el círculo. La prueba de Steiner lacompletaron más adelante varios otros matemáticos.
Steiner comienza con algunas construcciones geométricas[1] fáciles deentender; por ejemplo, se puede demostrar que cualquier curva cerradaque encierra una región que no es completamente convexa puede sermodificada para encerrar un área mayor "volteando" las áreas cóncavaspara que se vuelvan convexas. Se puede demostrar además quecualquier curva cerrada que no sea completamente simétrica puede serdeformada para encerrar un área mayor. La única forma que esperfectamente convexa y simétrica es el círculo, aunque esto, en símismo, no representa una prueba rigurosa del teorema isoperimétrico(ver los enlaces externos).
El teorema se suele enunciar en forma de una desigualdad que relaciona el perímetro y el área de una curva cerradaen el plano. Si P es el perímetro de la curva y A es el área de la región cerrada por la curva, entonces la desigualdadestablece que
Isoperimetría 19
Para el caso de un círculo de radio r, tenemos A = πr2 y P = 2πr, e introduciendo estos valores en la desigualdad semuestra que el círculo maximiza de hecho el área entre todas las curvas de perímetro fijo. De hecho, el círculo es laúnica curva que maximiza el área.Hay docenas de pruebas para esta desigualdad clásica. Varias se comentan en el artículo de Treiberg enlazado másabajo. En 1901, Hurwitz dio una prueba puramente analítica de la desigualdad isoperimétrica clásica basada en lasSeries de Fourier y en el teorema de Green.Las formulaciones modernas de los problemas isoperimétricos se dan a veces en términos de geometríasubriemanniana. En particular, el problema de Dido encuentra la expresión en términos del grupo de Heisenberg:dado un arco que conecta dos puntos, la "altura" z de un punto en el grupo de Heisenberg corresponde al área bajo elarco.El teorema isoperimétrico se generaliza a espacios de mayor dimensión: el dominio con volumen 1 con la superficiemínima es siempre una esfera.
Enlaces externosEn inglés
• Notas sobre la desigualdad isoperimétrica para un curso [2]
• Treiberg: varias pruebas de la desigualdad isoperimétrica [3]
• Bogomolny, Alexander. «Isoperimetric Theorem and Inequality [4]» (en inglés). Interactive MathematicsMiscellany and Puzzles [5].
Notas y referencias[1] J. Steiner, Einfacher Beweis der isoperimetrischen Hauptsätze, J. reine angew Math. 18, (1838), pp. 281–296; and Gesammelte Werke Vol. 2,
pp. 77–91, Reimer, Berlin, (1882).[2] http:/ / www. math. jhu. edu/ ~js/ Math427/ coursenotes/ node3. html[3] http:/ / www. math. utah. edu/ ~treiberg/ isoperim/ isop. pdf[4] http:/ / www. cut-the-knot. org/ do_you_know/ isoperimetric. shtml[5] http:/ / www. cut-the-knot. org/ index. shtml
Teorema de Green 20
Teorema de GreenEn física y matemáticas, el teorema de Green da la relación entre una integral de línea alrededor de una curvacerrada simple C y una integral doble sobre la región plana D limitada por C. El teorema de Green se llama así por elcientífico británico George Green y es un caso especial del más general teorema de Stokes. El teorema afirma:
Sea C una curva cerrada simple positivamente orientada, diferenciable por trozos, en el plano y sea D la regiónlimitada por C. Si L y M tienen derivadas parciales continuas en una región abierta que contiene D,
A veces la notación
se utiliza para establecer que la integral de línea está calculada usando la orientación positiva (antihoraria) de lacurva cerrada C.
Relación con el teorema de la divergenciaEl teorema de Green es equivalente a la siguiente analogía bidimensional del teorema de Stokes:
donde es el vector normal saliente en la frontera.
Para ver esto, considere la unidad normal en la parte derecha de la ecuación. Como es un vectorapuntando tangencialmente a través de una curva, y la curva C está orientada de manera positiva (es decir, en contradel sentido de las agujas del reloj) a través de la frontera, un vector normal saliente sería aquel que apunta en 90ºhacia la derecha, el cual podría ser . El módulo de este vector es . Por lo tanto
.Tomando los componentes de , el lado derecho se convierte en
que por medio del teorema de Green resulta:
Enlaces externos• Teorema de Green en Mathworld [1] (en inglés)• Una demostración en flash del Teorema de Green [2] (en inglés)Libros recomendadosCalculo multivariable [cuarta edicion] autor:James Stewart
Referencias[1] http:/ / mathworld. wolfram. com/ GreensTheorem. html[2] http:/ / www. mechanisms101. com/ greens_theorem_demo. html

Teorema de Stokes 21
Teorema de StokesEl teorema de Stokes en geometría diferencial es una proposición sobre la integración de formas diferenciales quegeneraliza varios teoremas del cálculo vectorial. Se nombra así por George Gabriel Stokes (1819-1903), a pesar deque la primera formulación conocida del teorema fue realizada por William Thomson y aparece en unacorrespondencia que él mantuvo con Stokes.
IntroducciónEl teorema fundamental del cálculo establece que la integral de una función f en el intervalo [a, b] puede sercalculada por medio de una antiderivada F de f:
El teorema de Stokes es una generalización de este teorema en el siguiente sentido:
• Para la F elegida, . En el lenguaje de las formas diferenciales es decir que f(x) dx es la derivada
exterior de la 0-forma (como por ejemplo una función) F: dF = f dx. El teorema general de Stokes aplica paraformas diferenciales mayores en vez de F.
• En un lenguaje matemático, el intervalo abierto (a, b) es una variedad matemática unidimensional. Su frontera esel conjunto que consiste en los dos puntos a y b. Integrar f en ese intervalo puede ser generalizado como integrarformas en una variedad matemática de mayor orden. Para esto se necesitan dos condiciones técnicas: la variedadmatemática debe ser orientable, y la forma tiene que ser compacta de manera que otorgue una integral biendefinida.
• Los dos puntos a y b forman parte de la frontera del intervalo abierto. Más genéricamente, el teorema de Stokes seaplica a variedades orientadas M con frontera. La frontera ∂M de M es una variedad en sí misma y hereda laorientación natural de M. Por ejemplo, la orientación natural del intervalo da una orientación de los dos puntosfrontera. Intuitivamente a hereda la orientación opuesta a b, al ser extremos opuestos del intervalo. Entonces,integrando F en los dos puntos frontera a, b es equivalente a tomar la diferencia F(b) − F(a).
Por lo que el teorema fundamental relaciona la integral de una función sobre un intervalo, con una integral o suma dela primitiva de la función en los límites que encierran dicho intervalo:
Por otro lado el teorema de Green hace algo similar en dos dimensiones, relaciona la integral a lo largo de una curvasimple con la integral de una combinación de derivadas sobre un área limitada por la curva simple:
Similarmente el teorema de la divergencia relaciona la integral de una función sobre una superficie con la integral deuna combinación de derivadas sobre el interior del conjunto:
El teorema de Stokes generaliza todos estos resultados, relacionando la integral sobre una frontera con la integral deuna función "derivada" sobre el interior de la región limitada por la frontera.
Teorema de Stokes 22
Formulación generalSea M una variedad de dimensión n diferenciable por trozos orientada compacta y sea ω una forma diferencial en Mde grado n-1 y de clase C¹. Si ∂ M denota el límite de M con su orientación inducida, entonces
aquí d es la derivada exterior, que se define usando solamente la estructura de variedad. El teorema debe serconsiderado como generalización del teorema fundamental del cálculo y, de hecho, se prueba fácilmente usando esteteorema.El teorema se utiliza a menudo en situaciones donde M es una subvariedad orientada sumergida en una variedad másgrande en la cual la forma ω se define.El teorema se extiende fácilmente a las combinaciones lineales de las subvariedades diferenciables por trozos, las,así llamadas, cadenas. El teorema de Stokes demuestra entonces que las formas cerradas definidas módulo una formaexacta se pueden integrar sobre las cadenas definidas módulo borde. Ésta es la base para el apareamiento entre losgrupos de homología y la cohomología de de Rham.El clásico teorema de Kelvin-Stokes
que relaciona la integral de superficie del rotacional del campo vectorial sobre una superficie Σ en el 3-espacioeuclidiano a la integral de línea del campo vectorial sobre su borde, es un caso especial del teorema de Stokesgeneralizado (con n = 2) una vez que identifiquemos el campo vectorial con una 1-forma usando la métrica en el3-espacio euclidiano.Asimismo el teorema de Ostrogradsky-Gauss o Teorema de la divergencia:
es un caso especial si identificamos un campo vectorial con la n-1 forma obtenida contrayendo el campo vectorialcon la forma de volumen euclidiano.El teorema fundamental del cálculo y el teorema de Green son también casos especiales del teorema de Stokesgeneralizado.La forma general del teorema de Stokes que usa formas diferenciales es de más alcance que los casos especiales, porsupuesto, aunque los últimos son más accesibles y a menudo son considerados más convenientes por físicos eingenieros.Otra forma de escribir el mismo teorema es la siguiente:
Donde es un campo vectorial cualquiera.Establece que la integral de superficie del rotacional de un campo vectorial sobre una superficie abierta es igual a laintegral (curvilínea) cerrada del campo vectorial a lo largo del contorno que limita la superficie.

Teorema de Stokes 23
Enlaces externos• Artículo donde se aplica el teorema de Stoke en el estudio de las pastillas de una guitarra eléctrica [1]
Referencias[1] http:/ / www. lpi. tel. uva. es/ ~nacho/ docencia/ ing_ond_1/ trabajos_02_03/ Guitarra/ Web/ electromag. htm
Teorema de la divergenciaEn cálculo vectorial, el teorema de la divergencia, también llamado teorema de Gauss o teorema deGauss-Ostrogradsky, teorema que relaciona el flujo de un campo vectorial a través de una superficie cerrada con laintegral de su divergencia en el volumen delimitado por dicha superficie. Intuitivamente se puede concebir como lasuma de todas las fuentes menos la suma de todos los sumideros de el flujo de salida neto de una región. Es unresultado importante en física, sobre todo en electrostática y en dinámica de fluidos. Desde el punto de vistamatemático es un caso particular del teorema de Stokes.
HistoriaEl teorema fue descubierto originariamente por Joseph Louis Lagrange en 1762, e independientemente por CarlFriedrich Gauss en 1813, por George Green en 1825 y en 1831 por Mikhail Vasilievich Ostrogradsky, que tambiéndio la primera demostracion del teorema. Posteriormente, variaciones del teorema de divergencia se conocen comoteorema de Gauss, el teorema de Green, y teorema de Ostrogradsky.
EnunciadoSean y dos subconjuntos abiertos en donde es simplemente conexo y el borde de ,
es una superficie regular o regular a trozos y cerrada.Sea , un campo vectorial de clase , es decir, cuenta con derivadas parciales de primer ordencontinuas.Entonces:
donde el vector normal a la superficie apunta hacia el exterior del volumen .Este resultado es una consecuencia natural del Teorema de Stokes, el cual generaliza el Teorema fundamental delcálculo. El teorema fue enunciado por el matemático alemán Carl Friedrich Gauss en 1835, pero no fue publicadohasta 1867. Debido a la similitud matemática que tiene el campo eléctrico con otras leyes físicas, el teorema deGauss puede utilizarse en diferentes problemas de física gobernados por leyes inversamente proporcionales alcuadrado de la distancia, como la gravitación o la intensidad de la radiación. Este teorema recibe el nombre de ley deGauss y constituye también la primera de las ecuaciones de Maxwell.

Teorema de la divergencia 24
Ejemplo de aplicación
Esfera de radio 2.
Calcular el flujo del campo vectoriala través de la superficie esférica
Resolución. A partir de la ecuación de la esfera se sabe que el radio es . Entonces:
Aplicando el teorema de la divergencia tenemos:
Enlaces externos• Differential Operators and the Divergence Theorem [1] at MathPages• The Divergence (Gauss) Theorem [2] by Nick Bykov, Wolfram Demonstrations Project.• Weisstein, Eric W. «Divergence Theorem [3]» (en inglés). MathWorld. Wolfram Research.
Referencias[1] http:/ / www. mathpages. com/ home/ kmath330/ kmath330. htm[2] http:/ / demonstrations. wolfram. com/ TheDivergenceGaussTheorem/[3] http:/ / mathworld. wolfram. com/ DivergenceTheorem. html

Divergencia (matemática) 25
Divergencia (matemática)La divergencia de un campo vectorial mide la diferencia entre el flujo entrante y el flujo saliente de un campovectorial sobre la superficie que rodea a un volumen de control, por tanto, si el campo tiene "fuentes" o "sumideros"la divergencia de dicho campo será diferente de cero.
Divergencia de un campo vectorialLa divergencia de un campo vectorial en un punto es un campo escalar, y se define como el flujo del campo vectorialpor unidad de volumen conforme el volumen alrededor del punto tiende a cero:
donde es una superficie cerrada que se reduce a un punto en el límite. El símbolo representa el operadornabla.Esta definición está directamente relacionada con el concepto de flujo del campo. Como en el caso del flujo, si ladivergencia en un punto es positiva, se dice que el campo posee fuentes. Si la divergencia es negativa, se dice quetiene sumideros. El ejemplo más característico lo dan las cargas eléctricas, que dan la divergencia del campoeléctrico, siendo las cargas positivas manantiales y las negativas sumideros del campo eléctrico.
Se llaman fuentes escalares del campo al campo escalar que se obtiene a partir de la divergencia de
La divergencia de un campo vectorial se relaciona con el flujo a través del teorema de Gauss o teorema de ladivergencia.
Coordenadas cartesianasCuando la definición de divergencia se aplica al caso de un campo expresado en coordenadas cartesianas,
el resultado es sencillo:
Coordenadas ortogonalesSin embargo, para un caso más general de coordenadas ortogonales curvilíneas, como las cilíndricas o las esféricas,la expresión se complica debido a la dependencia de los vectores de la base con la posición. La expresión para unsistema de coordenadas ortogonales es:
Donde los son los factores de escala del sistema de coordenadas, relacionados con la forma del tensor métrico endicho sistema de coordenadas. Esta fórmula general, para el caso de coordenadas cartesianas ( ) se reduce a la expresión anterior.Para coordenadas cilíndricas ( ) resulta:
Para coordenadas esféricas ( ) resulta

Divergencia (matemática) 26
Coordenadas generalesEn sistemas de coordenadas generales, no necesariamente ortogonales, la divergencia de un vector puede expresarseen términos de las derivadas parciales respecto a las coordenadas y el determinante del tensor métrico:
Divergencia de un campo tensorialEl concepto de divergencia puede extenderse a un campo tensorial de orden superior. En una variedad de Riemann ladivergencia de un tensor T completamente simétrico
Se define como:
Por ejemplo, en teoría de la relatividad especial la energía de un sistema se representa por un tensor simétrico desegundo orden, cuya divergencia es cero. De hecho el principio de conservación de la energía relativista toma laforma:
Teorema de la divergenciaEl teorema de la divergencia, frecuentemente llamado teorema de Gauss, relaciona el flujo de un campo vectorial através de una superficie cerrada con la integral de la divergencia de dicho campo en el interior del volumenencerrado por una superficie. Ese resultado lo hace interesante en aplicaciones relacionadas con la electrostáticacomo en la mecánica de fluidos.
El teorema se enuncia así: Sea una función vectorial diferenciable definida sobre un conjunto y seaun conjunto cerrado limitado por una frontera o superficie de contorno (que sea una variedad
diferenciable) y sea el vector normal en cada punto de la superficie, entonces se cumple que:

Gradiente 27
GradienteEn cálculo vectorial, el gradiente de un campo escalar es un campo vectorial. El vector gradiente de evaluado en un punto genérico del dominio de , ( ), indica la dirección en la cual el campo varíamás rápidamente y su módulo representa el ritmo de variación de en la dirección de dicho vector gradiente. Elgradiente se representa con el operador diferencial nabla seguido de la función (cuidado de no confundir elgradiente con la divergencia, ésta última se denota con un punto de producto escalar entre el operador nabla y elcampo). También puede representarse mediante , o usando la notación . La generalización delconcepto de gradiente a campos vectoriales es el concepto de matriz Jacobiana.
DefiniciónSi se toma como campo escalar el que se asigna a cada punto del espacio una presión P (campo escalar de 3variables), entonces el vector gradiente en un punto genérico del espacio indicará la dirección en la cual la presióncambiará más rápidamente. Otro ejemplo es el de considerar el mapa de líneas de nivel de una montaña como campoescalar que asigna a cada pareja de coordenadas latitud/longitud un escalar altitud (campo escalar de 2 variables). Eneste caso el vector gradiente en un punto genérico indicará la dirección de máxima inclinación de la montaña. Nóteseque el vector gradiente será perpendicular a las líneas de contorno (líneas "equiescalares") del mapa. El gradiente sedefine como el campo vectorial cuyas funciones coordenadas son las derivadas parciales del campo escalar, esto es:
Esta definición se basa en que el gradiente permite calcular fácilmente las derivadas direccionales. Definiendo enprimer lugar la derivada direccional según un vector:
Una forma equivalente de definir el gradiente es como el único vector que, multiplicado por el vector unitario, da laderivada direccional del campo escalar:
Con la definición anterior, el gradiente está caracterizado de forma unívoca. El gradiente se expresa alternativamentemediante el uso del operador nabla:
Interpretación del gradienteDe forma geométrica el gradiente es un vector que se encuentra normal (perpendicular) a la curva de nivel en elpunto que se está estudiando, llámese (x,y), (x,y,z), (tiempo, temperatura), etcétera. Algunos ejemplos son:• Considere una habitación en la cual la temperatura se define a través de un campo escalar, de tal manera que en
cualquier punto , la temperatura es . Asumiremos que la temperatura no varia con respectoal tiempo. Siendo esto así, para cada punto de la habitación, el gradiente en ese punto nos dará la dirección en lacual se calienta más rápido. La magnitud del gradiente nos dirá cuán rápido se calienta en esa dirección.
• Considere una montaña en la cual su altura en el punto (x,y) se define como H(x, y). El gradiente de H en esepunto estará en la dirección para la que hay un mayor grado de inclinación. La magnitud del gradiente nosmostrará cuán empinada se encuentra la pendiente.

Gradiente 28
PropiedadesEl gradiente verifica que:
• Es ortogonal a las superficies equiescalares, definidas por =cte.• Apunta en la dirección en que la derivada direccional es máxima.•• Su módulo es igual a esta derivada direccional máxima.• Se anula en los puntos estacionarios (máximos, mínimos y puntos de silla).•• El campo formado por el gradiente en cada punto es siempre irrotacional, esto es,
Demostración
(1) Sea M el conjunto de puntos que verifican , sea una curva en M,y sea un vector tangente ,
entonces:
de modo que es ortogonal a todo vector tangente (2) La derivada direccional en la dirección de un vector unitario viene dada por:
que es máxima cuando apunta en la dirección de (3) Por lo expuesto en (2)(4) El incremento infinitesimal en una dirección de viene dado por la derivada direccional en esa dirección, y dado queen un punto estacionario tal incremento ha de ser nulo para cualquier dirección el gradiente ha de anularse.(5) La componente k-ésima del rotacional puede calcularse empleando el símbolo de Levi-Civita y si las derivadas cruzadasson iguales se tiene:
Expresión en diferentes sistemas de coordenadasA partir de su definición puede hallarse su expresión en diferentes sistemas de coordenadas. En coordenadascartesianas, su expresión es simplemente
En un sistema de coordenadas ortogonales, el gradiente requiere los factores de escala, mediante la expresión
Para coordenadas cilíndricas ( , ) resulta
y para coordenadas esféricas ( , , )
En un sistema de coordenadas curvilíneo general el gradiente tiene la forma:
donde en la expresión anterior se usado el convenio de sumación de Einstein.

Gradiente 29
Gradiente de un campo vectorialVer también Tensor_deformación#Tensores_finitos_de_deformación
En un espacio euclídeo tridimensional, el concepto de gradiente también puede extenderse al caso de un campovectorial, siendo el gradiente de un tensor que da el diferencial del campo al realizar un desplazamiento:
Fijada una base vectorial, este tensor podrá representarse por una matriz 3x3, que en coordenadas cartesianas estáformada por las tres derivadas parciales de las tres componentes del campo vectorial. El gradiente de deformaciónestará bien definido sólo si el límite anterior existe para todo y es una función continua de dicho vector.Técnicamente el gradiente de deformación no es otra cosa que la aplicación lineal de la que la matriz jacobiana es suexpresión explícita en coordenadas.
EjemploDada la función su vector gradiente es el siguiente:
Aplicaciones
Aproximación lineal de una función
El gradiente de una función definida de Rn → R caracteriza la mejor aproximación lineal de la función en unpunto particular en Rn. Se expresa así:
donde es el gradiente evaluado en
Aplicaciones en físicaLa interpretación física del gradiente es la siguiente: mide la rapidez de variación de una magnitud física aldesplazarse una cierta distancia. Un gradiente alto significa que de un punto a otro cercano la magnitud puedepresentar variaciones importantes (aquí se entiende por gradiente alto o grande uno tal que su módulo es grande). Ungradiente de una magnitud pequeño o nulo implica que dicha magnitud apenas varía de un punto a otro.El gradiente de una magnitud física posee innumerables aplicaciones en física, especialmente enelectromagnetismo y mecánica de fluidos. En particular, existen muchos campos vectoriales que puede escribirsecomo el gradiente de un potencial escalar.• Uno de ellos es el campo electrostático, que deriva del potencial eléctrico:
• Todo campo que pueda escribirse como el gradiente de un campo escalar, se denomina potencial, conservativo oirrotacional. Así, una fuerza conservativa deriva de la energía potencial como:
• Los gradientes también aparecen en los procesos de difusión que verifican la ley de Fick o la ley de Fourier parala temperatura. Así, por ejemplo, el flujo de calor en un material es directamente proporcional al gradiente detemperaturas
siendo la conductividad térmica.

Jacobiano 30
JacobianoEn cálculo vectorial, se llama jacobiano o determinante jacobiano al determinante de la matriz jacobiana. Tantola matriz jacobiana como el determinante jacobiano reciben su nombre en honor al matemático Carl Gustav Jacobi.En geometría algebraica, el jacobiano de una curva hace referencia a la variedad jacobiana, un grupo y variedadalgebraica asociada a la curva, donde la curva puede ser embebida.
Matriz jacobianaLa matriz jacobiana es una matriz formada por las derivadas parciales de primer orden de una función. Una de lasaplicaciones más interesantes de esta matriz es la posibilidad de aproximar linealmente a la función en un punto. Eneste sentido, el jacobiano representa la derivada de una función multivariable.Propiamente deberíamos hablar más que de matriz jacobiana de diferencial jacobiana o aplicación linealjacobiana ya que la forma de la matriz dependerá de la base o coordenadas elegidas. Es decir, dadas dos basesdiferentes la aplicación lineal jacobiana tendrá componentes diferentes aún tratándose del mismo objeto matemático.La propiedad básica de la "matriz" jacobiana es la siguiente, dada una aplicación cualquiera continua es decir se dirá que es diferenciable si existe una aplicación lineal
tal que:(1)
Función escalarEmpecemos con el caso más sencillo de una función escalar en este caso la matriz jacobiana será unamatriz formada por un vector fila que coincide con el gradiente. Si la función admite derivadas parciales para cadavariable puede verse que basta definir la "matriz" jacobiana como:
Ya que entonces se cumplirá la relación (1) automáticamente, por lo que en este caso la "matriz jacobiana" esprecisamente el gradiente.
Función vectorialSupongamos es una función que va del espacio euclídeo n-dimensional a otro espacio euclídeom-dimensional. Esta función está determinada por m funciones escalares reales:
Cuando la función anterior es diferenciable, entonces las derivadas parciales de estas m funciones pueden serorganizadas en una matriz m por n, la matriz jacobiana de F:
Esta matriz es notada de diversas maneras:

Jacobiano 31
Nótese que la fila, i-ésima fila coincidirá dada con el gradiente de la función yi, para i = 1,...,m.Si p es un punto de Rn y F es diferenciable en p, entonces su derivada está dada por JF(p). En este caso, la aplicaciónlineal descrita por JF(p) es la mejor aproximación lineal de F cerca del punto p, de esta manera:
para x cerca de p. O con mayor precisión:
EjemplosEjemplo 1. La matriz jacobiana de la función F : R3 → R3 definida como:
es:
No siempre la matriz jacobiana es cuadrada. Véase el siguiente ejemplo.Ejemplo 2. Supóngase la función F : R3 → R4, cuyas componentes son:
Aplicando la definición de matriz jacobiana:
Determinante jacobianoSi m = n, entonces F es una función que va de un espacio n-dimensional a otro. En este caso la matriz jacobiana escuadrada y podemos calcular su determinante, conocido como el determinante jacobiano o simplemente jacobiano.El determinante jacobiano en un punto dado nos da información importante sobre el comportamiento de F cerca deese punto. Para empezar, una función F es invertible cerca de p si el determinante jacobiano en p es no nulo. Másaún, el valor absoluto del determinante en p nos da el factor con el cual F expande o contrae su volumen cerca de p.

Jacobiano 32
EjemplosEjemplo 1. El determinante jacobiano de la función F : R3 → R3 definida como:
es:
El teorema de la función inversa garantiza que la función es localmente invertible en todo el dominio excepto quizádonde ó (es decir, los valores para los que el determinante se hace cero). Si imaginamos un objetopequeño centrado en el punto (1,1,1) y le aplicamos F, tendremos un objeto aproximadamente 40 veces másvoluminoso que el original.Ejemplo 2. Cambiando un poco la función anterior por ésta:
El determinante jacobiano quedará:
En este caso existen más valores que anulan al determinante. Por un lado , y por otro:
con
Invertibilidad y jacobianoUna propiedad interesante del jacobiano es que cuando éste es diferente de cero en el entorno de un punto dado,entonces el teorema de la función inversa garantiza que la función admite una función inversa alrededor de dichopunto.El teorema anterior expresa una condición suficiente aunque no necesaria, ya que por ejemplo la función tiene por jacobiano que se anula en el punto , aunque alrededor de ese punto la función sigue teniendoinversa aún cuando el jacobiano es nulo en el origen.

Derivada parcial 33
Derivada parcialEn matemática, una derivada parcial de una función de diversas variables, es su derivada respecto a una de esasvariables manteniendo las otras como constantes. Las derivadas parciales son útiles en cálculo vectorial y geometríadiferencial.La derivada parcial de una función f respecto a la variable x se representa con cualquiera de las siguientes notacionesequivalentes:
Donde es la letra 'd' redondeada, conocida como la 'd de Jacobi'.Cuando una magnitud es función de diversas variables ( , , , ), es decir:
Al realizar esta derivada obtenemos la expresión que nos permite obtener la pendiente de la recta tangente a dichafunción en un punto dado. Esta recta es paralela al plano formado por el eje de la incógnita respecto a la cual seha hecho la derivada y el eje z.Analíticamente el gradiente de una función es la máxima pendiente de dicha función en la dirección que se elija.Mientras visto desde el álgebra lineal, la dirección del gradiente nos indica hacia donde hay mayor variación en lafunción.
IntroducciónSupongamos que es una función de más de una variable, es decir una función real de variable vectorial. Para elcaso,
Un gráfico de z = x2 + xy + y2. Queremos encontrar la derivada parcial en (1, 1, 3)que deja a y constante; la correspondiente línea tangente es paralela al eje x.
Es difícil describir la derivada de talfunción, ya que existe un número infinito delíneas tangentes en cada punto de susuperficie. La derivación parcial es el actode elegir una de esas líneas y encontrar supendiente. Generalmente, las líneas que masinteresan son aquellas que son paralelas aleje x, y aquellas que son paralelas al eje y.

Derivada parcial 34
Este es un corte del gráfico a la derecha de y = 1.
Una buena manera de encontrar los valorespara esas líneas paralelas es la de tratar lasotras variables como constantes mientras sedeja a variar sólo una. Por ejemplo, paraencontrar la línea tangente de la función dearriba en (1, 1, 3) que es paralela el eje x,tratamos a la variable y como constante. Elgráfico de la función y el plano y = 1 semuestran a la derecha. A la izquierda,vemos cómo se ve la función, en el planoy = 1. Encontrando la línea tangente en estegráfico, descubrimos que la pendiente de lalínea tangente de ƒ en (1, 1, 3) que esparalela al eje x es tres. Que escribimos:
en el punto (1, 1, 3),o como "La derivada parcial de z con respecto a x en (1, 1, 3) es 3."
Ejemplos
El volumen de un cono depende de la altura (h) yel radio (r)
• Considera el volumen V de un cono, este depende de la altura h delcono y su radio r de acuerdo con la fórmula
Las derivadas parciales de V respecto a r y h son:
• Otro ejemplo, dada la función tal que:
la derivada parcial de respecto de es:
mientras que con respecto de es:

Derivada parcial 35
Definición formalComo las derivadas en una variable, las derivadas parciales están definidas como el límite. Donde U es unsubconjunto abierto de Rn y f : U → R una función. Definimos derivada parcial de f en el punto a = (a1,..., an) ∈ Ucon respecto a la i-ésima variable xi como:
O visto respecto a la derivada direccional:
donde es el vector unitario del eje respecto al que se deriva ( ). ||left Incluso si todas las derivadas parcialesexisten en el punto a, la función no necesariamente es continua en ese punto. Sin embargo, si todas las derivadasparciales existen alrededor de a y son continuas, entonces la función no sólo es continua sino además diferenciablecerca de a. En este caso, f es una función C1.
NotaciónPara el siguiente ejemplo, f será una función de x e y.•• Derivadas parciales de primer orden:
Derivadas parciales (dobles) de segundo orden:
Derivadas cruzadas de segundo orden:
TermodinámicaEn termodinámica y otras áreas de la física se emplea la siguiente notación:
Que significa que y entonces:
Esta notación se usa porque frecuentemente una magnitud puede expresarse como función de diferentes variables porlo que en general:
Ya que la forma precisa de las funciones y es diferente, es decir, se trata de funcionesdiferentes.

Derivada parcial 36
Derivadas parciales de orden superiorA su vez, la derivada parcial puede verse como otra función definida en U y derivarse parcialmente. Si todassus derivadas parciales existen y son continuas, llamamos a f una función C2; en este caso, las derivadas parciales(llamadas parciales) pueden ser intercambiadas por el teorema de Clairaut también conocido como teorema deSchwartz.
En R2, si se cumple lo ya dicho, se asegura que:
Geometría diferencialEn matemáticas, la geometría diferencial es el estudio de la geometría usando las herramientas del análisismatemático. Los objetos de estudio de este campo son las variedades diferenciables (tal y como la topologíadiferencial) tanto como las nociones de conexión y curvatura (que no se estudia en la topología diferencial).Las aplicaciones modernas de la geometría diferencial han dado el estado del arte que goza la física.
Enlaces externos• Curso avanzado de geometría diferencial [1], por Álvaro Tejero Cantero y Marta Balbás Gambra (con licencia
libre)
Referencias[1] http:/ / forja. rediris. es/ frs/ download. php/ 1923/ VTF-1_1_0. pdf

Fibrado 37
FibradoEn topología, un fibrado (o haz fibrado) es una función continua sobreyectiva π, de un espacio topológico E a otroespacio topológico B, satisfaciendo otra condición que lo hace de una forma particularmente simple localmente.Introduciendo otro espacio topológico F, utilizamos la función de proyección de B x F → B como modelo. Porejemplo en el caso de un fibrado vectorial, F es un espacio vectorial.
DefiniciónUn fibrado consiste en una cuaterna , donde , y son espacios topológicos y
es una aplicación continua y sobreyectiva, de manera que para cualquier existe un entornode en , y un homeomorfismo tal que , con
, . Equivalentemente, para todo punto de B existe un entorno y unhomeomorfismo tal que el siguiente diagrama conmuta:
La aplicación es abierta por ser una proyección en un producto cartesiano y B tiene la topología cociente. Elespacio se llama el espacio de base del fibrado, el espacio total, para cualquier , se llamala fibra en y la función se llama la proyección. Se denota y se dice que es localmente
trivial y el par es una trivialización local. Es habitual escribir en vez de si y sepueden entender por contexto y decir que E es un fibrado sobre B.
EjemplosEl primer ejemplo es el fibrado producto o fibrado trivial dado por .Un ejemplo de fibrado no (globalmente) trivial es la Banda de Möbius como espacio total E, base uncírculo y fibra F=(0,1) un segmento de línea. La rotación de los segmentos F a lo largo de la cinta es apreciable sóloglobalmente ya que localmente la estructura de la banda es homeomorfa a un producto . Unadescripción analítica explícita es
y la aplicación es la proyección en la primera coordenada.
Un fibrado vectorial es en particular un fibrado. El fibrado vectorial se llama real o complejo si lafibra F es un espacio vectorial real o complejo respectivamente. El fibrado tangente y el fibrado cotangente sonejemplos de fibrados vectoriales.Un espacio recubridor o cubierta es un fibrado, aquí la F es un conjunto discreto.Existen en la literatura una amplia cantidad de ejemplos con variedades específicas o fibras prescritas. Un par deejemplos recurrentes en topología algebraica son la fibración de Hopf de sobre con fibra y lafibración del espacio de caminos de un espacio topológico con punto base , con fibraisomorfa al espacio de lazos de .

Fibrado 38
MorfismosUn morfismo entre dos fibrados y consiste en un par de aplicaciones contínuas ,
y , tales que . Nótese que la aplicación determina la aplicación . Para cada punto seinduce una aplicación .Los morfismos entre fibrados se puede componer mediante . En particular tenemos la noción de isomorfismo defibrados: un morfismo entre dos fibrados y es un isomorfismo si existe unmorfismo entre y tal que y . Observemos que unacondición necesaria para que los fibrados sean isomorfos es que las fibras sean isomorfas.Un morfismo vertical en un fibrado es un morfismo con . Un primer paso en laclasificación de fibrados es fijar el espacio base B y clasificar los fibrados con base B salvo isomorfismo.
OperacionesEn esta sección introducimos posibles operaciones en la categoría de fibrados en espacios topológicos. Para fibradosparticulares es posible desarrollar operaciones específicas, por ejemplo las operaciones de álgebra lineal como elespacio dual, el determinante, el producto tensorial y el producto exterior extienden a las correspondientes nocionespara fibrados vectoriales. Las operaciones aquí descritas son generales.
El pull-back de fibrados es una de las operaciones de cambio de base. Sea un fibrado yuna aplicación contínua. El fibrado pull-back de E a través de f tiene por espacio total
con aplicación proyección , . Entonces es sencillo demostrar quees un fibrado. Nótese que las fibras de y son isomorfas y que existe un morfismo
natural de y . Esta operación es functorial contravariante con respecto a la composición de morfismos, esdecir, y . El fibrado pull-back depende en general de E y de la aplicación fpero si E es un fibrado trivial también.La restricción de fibrados. Sea un subespacio, la inclusión y E un fibrado sobre B. Elfibrado restricción de E al subespacio A es el fibrado .
El producto (cartesiano) de dos fibrados y es el fibrado.
Si E y E' son fibrados sobre la misma base B, el producto fibrado sobre B se define como
Las fibras son por tanto isomorfas a . Nótese que el fibrado no es más que la restricción delfibrado producto cartesiano a la diagonal con la identificación .
Propiedades homotópicasEn esta sección se mencionan propiedades de los fibrados en relación a las homotopías. Las demostraciones sonejercicios y se pueden encontrar en cualquier texto de referencia.El resultado fundamental para entender el compartamiento de los fibrados por homotopía es el siguiente: Sea
un fibrado y la proyección al primer factor, entonces. En particular
.
Del enunciado anterior se siguen dos corolarios:
Fibrado 39
(1) Sean aplicaciones contínuas y homotópicas y E un fibrado sobre B. Entonces
(2) Sea un retracto de deformación y E un fibrado sobre B. Entonces, Se deduce del segundo resultado que si el espacio base B es contráctil cualquier fibrado es isomorfoal fibrado trivial .
SeccionesUna sección de un fibrado es una función continua, f: B → E tal que π(f(x))=x, para x en B. En general un fibrado notiene secciones, uno de los propósitos de la teoría es explicar la existencia de estas así como su cuantificación.Nótese que los fibrados vectoriales siempre tienen una secció, la sección cero.La obstrucción a la existencia de una sección se puede codificar en elementos de una teoría de cohomología de labase; en el caso de que el espacio base sea un CW-complejo, hallar obstrucciones en la cohomología celular conducea la teoría de las clases características en topología algebraica. Una aplicación sencilla de esta teoría es demostrarque las esferas de dimensión par no tienen campos tangentes no nulos, luego no son paralelizables.
Grupo estructuralExiste, a veces, un grupo topológico G de transformaciones de E, tal que si ρ denota la acción, π(ρ(g)[e])= π(e) parag en G y e en E. La condición indica que cada G-órbita reside dentro de una sola fibra. En ese caso, G se llama grupoestructural del fibrado. Para calificar como G-fibrado, las condiciones que emparejan entre las vecindadestrivializable locales tendrían que ser los intertwiners de G-acciones también.Si, además, actúa G libremente, transitivamente y continuamente sobre cada fibra, entonces llamamos al fibradofibrado principal. Un ejemplo de un fibrado principal que ocurre naturalmente en geometría es el fibrado de todaslas bases de los espacios tangentes a una variedad, con G grupo general lineal; la restricción en geometría deRiemann a las bases ortonormales, limitaría G al grupo ortogonal. Vea vierbein para más detalles.Hacer G explícito es esencial para las operaciones de crear un fibrado asociado, y hacer precisa la reducción delgrupo estructural de un fibrado.
AplicacionesEl lenguaje de la teoría de fibrados permite la expresión de situaciones físicas en términos matemáticos. Unainstancia de ello son las teorías gauge donde los fibrados principales codifican las nociones físicas de simetrías,potenciales y fuerza en términos del grupo de estructura, las conexiones y la curvatura.
References• Steenrod, Norman (1951), The Topology of Fibre Bundles, Princeton University Press, ISBN 0-691-00548-6.• Bleecker, David (1981), Gauge Theory and Variational Principles, Reading, Mass: Addison-Wesley publishing,
ISBN 0-201-10096-7.• Ehresmann, C. «Les connexions infinitésimales dans un espace fibré différentiable». Colloque de Topologie
(Espaces fibrés), Bruxelles, 1950. Georges Thone, Liège; Masson et Cie., Paris, 1951. pp. 29–55.• Husemöller, Dale (1994), Fibre Bundles, Springer Verlag, ISBN 0-387-94087-1
• Michor, Peter W. (2008), Topics in Differential Geometry, Graduate Studies in Mathematics, Vol. 93, Providence:American Mathematical Society (to appear).
• Voitsekhovskii, M.I. (2001), «Fibre space [1]», en Hazewinkel, Michiel (en inglés), Encyclopaedia ofMathematics, Springer, ISBN 978-1556080104

Fibrado 40
Enlaces externos• PlanetMath: Fiber Bundle [2]
• MathWorld: Fiber Bundle [3]
Referencias[1] http:/ / eom. springer. de/ F/ f040060. htm[2] http:/ / planetmath. org/ encyclopedia/ FiberBundle. html[3] http:/ / mathworld. wolfram. com/ FiberBundle. html
Fibrado de SeifertUn fibrado de Seifert es una 3-variedad que se obtiene construyendo un fibrado del tipo
donde es un orbifold que admite conos pero no líneas reflectoras (reflector lines). Esto último significa que es localmente un producto donde es un conjunto abierto de salvo en una cantidad finita de puntosexcepcionales para los cuales hay discos (vecindades) , uno para cada ,disjuntos, tales que la fibración por ya no es trivial igual a (fibraciones no triviales de toros sólidos).Para obtener una fibración no trivial en un toro sólido, primero cortamos este en un disco meridional. Luego en estecilindro sólido damos un giro de y después pegamos los extremos obteniendo un toro sólido fibrado por
círculos -veces más largos salvo el círculo determinado por el centro del disco.
ClasificaciónLa siguiente tabla es un diccionario bilingüe entre la primera clasificación original de H. Seifert en 1933 y la1968-moderna de P. Orlik-F. Raymond
He aquí los once primeros SFS cuya caractéristica de Euler del orbifold es χ>0:
1. : los cuales son (Oo,0|0)= , (Oo,0|1)= . Y si b>1 entonces (Oo,0|b)=L(b,1) sonespacios lentes no triviales.
2.3.4.5.6.7. es la esfera de Poincaré8. : son dos; y el fibrado por la esfera no trivial sobre el círculo: .9. : son; cuando es par, y cuando es
impar.

Fibrado de Seifert 41
10. : es una prisma-variedad.11. : también.
Ahora los siguientes 11 que cumplen χ=0:
1.2.3.4.5. : con b=1 esto es el producto trivial 6.7.8. : son dos K-fibrados sobre el círculo. Para b=0 es . Y para b=1 es , donde t
es el único giro de Dehn de K.9.10.11. : son dos K-fibrados sobre el círculo con las respectivas monodromías el
y-homeomorfismo y el y-homeomorfismo compuesto con el único giro de Dehn en la botella de Klein K.
Enlace externoPara un tratado más técnico favor de dirigirse a:ftp:/ / ftp. math. binghamton. edu/ pub/ matt/ seifert. pdf
Teoría de campo de gauge
Cromodinámica cuántica como teoría gauge,basada en el grupo SU(3). Cada tipo de quark (uo d en la imagen) posee tres «copias» de distinto
«color». Los gluones actúan como bosónintermediario entre partículas con color (como un
fotón entre partículas con carga eléctrica).
En física, una teoría de campo gauge (o teoría de gauge o teoría de"recalibración") es un tipo de teoría cuántica de campos que se basaen el hecho de que la interacción entre fermiones puede ser vista comoel resultado de introducir transformaciones "locales" pertenecientes algrupo de simetría interna en el que se base la teoría gauge. Las teoríasde gauge se discuten generalmente en el lenguaje matemático de lageometría diferencial e involucran el uso de transformaciones degauge. Una transformación de gauge es una transformación de algúngrado de libertad interno, que no modifica ninguna propiedadobservable física.
Un campo gauge es un campo de Yang-Mills asociado a lastransformaciones de gauge asociadas a la teoría y que describe lainteracción física entre diferentes campos fermiónicos. Por ejemplo elcampo electromagnético es un campo de gauge que describe el modode interactuar de fermiones dotados con carga eléctrica.
IntroducciónEn física, las teorías extensamente aceptadas del modelo estándar son teorías de campo de gauge. Esto significa que los campos en el modelo estándar exhiben alguna simetría interna abstracta conocida como invariancia de gauge. La invariancia gauge significa que el lagrangiano que describe el campo es invariante bajo la acción de un grupo de Lie que se aplica sobre las componentes de los campos. Cuando se aplica la misma transformación a todos los puntos del

Teoría de campo de gauge 42
espacio, se dice que la teoría tiene invariancia gauge global. Las teorías de gauge usan lagrangianos, tales que encada punto del espacio es posible aplicar transformaciones o "rotaciones" ligeramente diferentes en cada punto delespacio y aun así el lagrangiano es invariante, en ese caso se dice que el lagrangiano presenta también invariancia degauge local. Es decir, un lagrangiano con simetría gauge local permite escoger ciertos grados de libertad internos deuna manera en una región del espacio y de otra en otra región del espacio suficientemente alejada sin afectar a laprimera región. La posibilidad de que un lagrangiano admita esta transformación más general puede ser visto comouna versión generalizada del principio de equivalencia de la teoría de la relatividad general.Desde el punto de vista físico, los campos de gauge se manifiestan físicamente en forma de partículas bosónicas sinmasa (bosones gauge), por lo que se dice que todos los campos de gauge son mediados por el grupo de bosones degauge sin masa de la teoría.
Formulación matemáticaPara formular una teoría de campo gauge es necesario que la dinámica de los campos fermiónicos de la teoría vengadescrita por un lagrangiano que tenga alguna simetría interna "local" dada por un grupo de Lie, llamado grupo detransformaciones de gauge. Así pues, al "rotar" algo en cierta región, no se determina cómo los objetos rotan enotras regiones (se usa el término "rotar" porque los grupos de gauge más frecuentes son SU(2) y SU(3) que songeneralizaciones del grupo de rotaciones ordinarias). Físicamente una transformación de gauge es unatransformación de algún grado de libertad que no modifica ninguna propiedad física observable. Las doscaracterísticas formales que hacen de un campo un campo gauge son:1. Los campos gauge aparecen en el lagrangiano que rige la dinámica del campo en forma de conexión, por tanto,
matemáticamente están asociadas a 1-formas que toman valores sobre una cierta álgebra de Lie.2.2. El campo de gauge puede ser visto como el resultado de aplicar a diferentes puntos del espacio diferentes
transformaciones dentro del grupo de simetría asociado a los campos fermiónicos de la teoría.
Mecanismo de HiggsAunque en el modelo estándar todas las interacciones o fuerzas básicas exhiben algún tipo de simetría de gauge, estasimetría no es siempre obvia en los estados observados. A veces, especialmente cuando la temperatura disminuye, lasimetría se rompe espontáneamente, es decir, ocurre el fenómeno conocido como ruptura espontánea de la simetría.Un ejemplo básico de la simetría rota que se da a menudo es una de estado sólido imán. Se compone de muchosátomos, cada uno de las cuales tiene un momento magnético dipolar. Sin embargo, las leyes del magnetismo sonrotacionalmente simétricas, y es así que en las altas temperaturas, los átomos estarán alineados aleatoriamente, y lasimetría rotatoria será restaurada. Semejantemente, se puede, con las condiciones apropiadas, enfriar agua bajo latemperatura de solidificación. Cuando un cristal de hielo se tira en el líquido, la simetría es rota y el agua solidificainmediatamente.Para dar cuenta de estos hechos de ruptura de la simetría, se ha propuesto el mecanismo de Higgs. Si en ellagrangiano de la interacción o "campo de fuerzas" concreto que está siendo estudiado se introducen cierto tipo decampos escalares que interactúan consigo mismo, en el límite de bajas energías los bosones gauge se comportancomo si estuvieran dotados de masa; este efecto es precisamente el mecanismo de Higgs. En otras palabras elmecanismo de Higgs puede ser interpretado pensando que la interacción entre el campo escalar introducido o campode Higgs y los bosones gauge, hace que estos "adquieran" masa, es decir, presenten interacciones como las quepresentarían genuinas partículas con masa.

Teoría de campo de gauge 43
Formulación matemáticaEn una teoría de campo de gauge, una transformación de gauge es una aplicación diferenciable:
(*)
Donde:, es espacio-tiempo, o variedad diferenciable, donde aparece el campo.
, es un grupo de Lie o grupo de simetría del campo, es decir, es un grupo de transformaciones que dejaninvariable el lagrangiano que define la dinámica del campo. Este grupo se suele llamar grupo detransformaciones de gauge del campo.
Matemáticamente podemos tratar convenientemente una teoría de gauge como una conexión definida sobre unfibrado principal definido sobre el espacio-tiempo , más precisamente el fibrado puede definirse como el espaciotopológico cociente de cartas locales:
Donde:
es una carta locales otra carta local
es el espacio vectorial que hace de fibra, para las teorías gauge más comunes k = 2 ó 3 (y en algunasteorías de gran unificación k puede llegar a ser 9 o 10).
son aplicaciones que para cada solape entre cartas locales dan el cambio decoordenadas sobre las fibras.
En la construcción anterior de fibrado principal el espacio base será el espacio-tiempo será y la "fibra" será elespacio vectorial . El grupo de gauge de la teoría es un grupo de Lie . Hecha estaconstrucción una transformación de gauge es precisamente una sección diferenciable del anterior fibrado principal.Es decir una aplicación como (*) que a cada punto del espacio le asigna un elemento del grupo de Lie que representala simetría gauge. Una transformación de gauge global sería una aplicación como esa que a todos los puntos delespacio-tiempo les asignara la misma transformación, mientras que un lagrangiano con invariancia gauge local esuno tal que si en cada punto del espacio se elige una transformación diferente, y por tanto (*) es lo más generalposible, entonces el lagrangiano no cambia.Físicamente una transformación de gauge es una transformación de algún grado de libertad interno que nomodifica ninguna propiedad observable física. El número de grados de libertad internos es el mismo k que aparece enla definición anterior.
ConexionesTécnicamente el campo de gauge asociado a una teoría gauge, aparece en el modelo matemático como una conexiónsobre el fibrado principal anteriormente definido. Concretamente a partir las componentes de la 1-forma quetoma valores en el álgebra de Lie asociada al grupo de gauge, pueden calcularse el conjunto de componentes físicasque caracterizan el campo de gauge. Propiamente el campo de gauge es un campo de Yang-Mills obtenido a partir dela 2-forma dada por:
Donde d es la derivada exterior y es producto exterior (o producto cuña).

Teoría de campo de gauge 44
Transformaciones infinitesimalesUna transformación de gauge infinitesimal es similar a una transformación de gauge ordinaria, pero en la definiciónse substituye el grupo de gauge por su álgebra de Lie asociada:
Donde:, es espacio-tiempo, o variedad diferenciable, donde aparece el campo.
, es el álgebra de Lie correspondiente al grupo de gauge . Esta definición puede extenderse acualquier elemento sobre un fibrado tangente al espacio-tiempo, de tal modo que están definidas lastransformaciones de gauge infinitesiamales de cualquier tipo de campo espinorial o tensorial.
Las transformaciones de gauge inifinitesimales definen el número de campos bosónicos de la teoría y la forma enque estos intereactúan. El conjunto de todas las transformaciones de gauge infinitesimales forman un álgebra de Lie,que se caracterizada por un escalar diferenciable a valores en un álgebra de Lie, ε. Bajo tal transformación de gaugeinfinitesimal:
Donde [·,·] es el corchete de Lie. Estas tansformaciones infinitesimales tienen varias propiedades interesantes:• Las transformaciones de gauge infinitesimales conmutan con la derivada covariante definida por la conexión:
, donde es la derivada covariante.• También, , que significa que se transforma covariantemente.• No todas las transformaciones de gauge pueden ser generadas por transformaciones infinitesimales de gauge en
general; por ejemplo, cuando la variedad de base es una variedad compacta sin borde tal que la clase dehomotopía de funciones de esa variedad al grupo de Lie es no trivial, un ejemplo de ello son los instatones.
Lagrangiano de una teoría gaugeLa integral de acción calculada a partir del lagrangiano del campo de Yang-Mills está dada por:
Donde designa el operador dual de Hodge y la integral se define como la integral de un n-forma proporcional alelemento de volumen de la variedad de Riemann que define el espacio-tiempo.
Bucle de WilsonUna cantidad que es invariante bajo transformaciones de gauge es el bucle de Wilson, que se define sobre cualquiertrayectoria cerrada, γ, como sigue:
donde ρ es un carácter de una representación compleja; y representa al operador de trayectoria ordenada. En lasteorías de las interacciones electrodébil y fuerte del modelo estándar de la física de partículas, Lagrangianos debosones, que medían interacciones entre los fermiones, son invariantes bajo transformaciones de gauge. Esta es larazón por la cual estos bosones se llaman bosones de gauge.

Teoría de campo de gauge 45
Formas de Chern-SimonsVer Chern-Simons.
Ejemplos de teorías de campo de gauge•• Electrodinámica cuántica•• Modelo electrodébil•• Modelo estándar
Referencias
BibliografíaLibros• Bromley, D.A. (2000). Gauge Theory of Weak Interactions. Springer. ISBN 3-540-67672-4.• Cheng; Li, L.-F. (1983). Gauge Theory of Elementary Particle Physics. Oxford University Press. ISBN
0-19-851961-3.• Frampton, P. (2008). Gauge Field Theories (3rd edición). Wiley-VCH.• Kane, G.L. (1987). Modern Elementary Particle Physics. Perseus Books. ISBN 0-201-11749-5.• Schumm, Bruce (2004) Deep Down Things. Johns Hopkins University Press. Esp. chpt. 8. A serious attempt by a
physicist to explain gauge theory and the Standard Model with little formal mathematics.Artículos• Introduction to Gauge Theories. 1997. Bibcode: 1997hep.ph....5211B (http:/ / adsabs. harvard. edu/ abs/ 1997hep. ph. .
. . 5211B).• Gross, D. (1992). « Gauge theory – Past, Present and Future (http:/ / psroc. phys. ntu. edu. tw/ cjp/ v30/ 955.
pdf)». Consultado el 23-04-2009.• «From Lorenz to Coulomb and other explicit gauge transformations». Am.J.Phys 70: pp. 917–928. 2002. doi:
10.1119/1.1491265 (http:/ / dx. doi. org/ 10. 1119/ 1. 1491265). Bibcode: 2002AmJPh..70..917J (http:/ / adsabs. harvard.edu/ abs/ 2002AmJPh. . 70. . 917J).
• Preparation for Gauge Theory. 1999. Bibcode: 1999math.ph...2027S (http:/ / adsabs. harvard. edu/ abs/ 1999math. ph. .. 2027S).
Enlaces externos• George Svetlichny (http:/ / xxx. lanl. gov/ abs/ math-ph/ 9902027)

Grupo de Lie 46
Grupo de Lie
El toro es un ejemplo de grupo de Lie homeomorfo a .
En matemática, un grupo de Lie (nombradoasí por Sophus Lie) es una variedaddiferenciable real o compleja que es tambiénun grupo tal que las operaciones de grupo(multiplicación e inversión) son funcionesdiferenciables o analíticas, según el caso.Los grupos de Lie son importantes enanálisis matemático, física y geometríaporque sirven para describir la simetría deestructuras analíticas. Fueron introducidospor Sophus Lie en 1870 para estudiarsimetrías de ecuaciones diferenciales.
Mientras que el espacio euclídeo Rn es un grupo de Lie real (con la adición ordinaria de vectores como operación degrupo), ejemplos más típicos son grupos de matrices inversibles (multiplicación de matrices), por ejemplo el grupoSO(3) de todas las rotaciones en el espacio de 3 dimensiones. Véase abajo para una lista más completa de ejemplos.
Tipos de grupos de LieSe clasifican los grupos de Lie con respecto a sus propiedades algebraicas (simple, semisimple, resoluble, nilpotente,abeliano), su conexidad (conexo o no conexo) y su compacidad.
Homomorfismos e isomorfismosSi G y H son grupos de Lie (reales o complejos ambos), entonces un morfismo de grupos de Lie f: G → H es unhomomorfismo de grupo que es también una función diferenciable o analítica. (Se puede demostrar que esequivalente a requerir solamente que sea función continua.) La composición de dos tales homomorfismos es otra vezun homomorfismo, y la clase de todos los grupos de Lie (reales o complejos), junto con estos morfismos, forma unacategoría. Dos grupos de Lie se dicen isomorfos si existe un homomorfismo biyectivo entre ellos cuyo inverso estambién un homomorfismo. Los grupos de Lie isomorfos no necesitan, para cualquier propósito práctico, serdistinguidos; se diferencian solamente en la notación de sus elementos.
El álgebra de Lie asociada a un grupo de LieA cada grupo de Lie, podemos asociar un álgebra de Lie que captura totalmente la estructura local del grupo. Esto sehace como sigue. Un campo vectorial en un grupo de Lie G se dice invariante por la izquierda si conmuta con latraslación izquierda, que significa lo siguiente. Defina Lg[f](x) = f(gx) para cualquier función diferenciable o analíticaf: G → F y todo g, x en G (aquí F es el cuerpo R o C). entonces el campo vectorial X es invariante por la izquierda siX Lg = Lg X para todo g en G.El conjunto de todos los campos vectoriales en una variedad diferenciable es un álgebra de Lie sobre F. En un grupode Lie, los campos vectoriales invariantes por la izquierda forman una subálgebra, el álgebra de Lie asociada a G,denotado generalmente por una g gótica ( ). Esta álgebra de Lie g es finito-dimensional (tiene la misma dimensiónque la variedad G) lo que la hace susceptible a las tentativas de clasificación. Clasificando g, uno puede tambiénconseguir un acercamiento al grupo de Lie G. La teoría de representación de los grupos simples de Lie son el mejory más importante ejemplo.

Grupo de Lie 47
Cada elemento v del espacio tangente TeG en el elemento identidad e de G determina un campo vectorial invariantepor la izquierda único cuyo valor en el elemento x de G es denotado xv; el espacio vectorial subyacente a g se puedepor lo tanto identificar con TeG. la estructura del álgebra de Lie en TeG puede también ser descrita como sigue: laoperación del conmutador
en G x G envía (e, e) a e, así que su derivada da una operación bilineal en TeG. resulta que esta operación bilinealsatisface los axiomas de un corchete de Lie, y es igual al que es definido a través de campos vectoriales invariantespor la izquierda.Cada vector v en g determina una función c: R → G cuya derivada en todo punto viene dado por el campo vectorialinvariante por la izquierda correspondiente
y que tiene la propiedad
para todo s y t. La operación en el lado derecho es la multiplicación de grupo en G. La semejanza formal de estafórmula con la que es válida para la función exponencial justifica la definición
esto se llama la función exponencial, y mapea el álgebra de Lie g en el grupo de Lie G. Proporciona undifeomorfismo entre una vecindad de 0 en g y una vecindad de e en G. Esta función exponencial es unageneralización de la función exponencial para los números reales (puesto que R es el álgebra de Lie del grupo de Liede números reales positivos con la multiplicación usual), para los números complejos (puesto que C es el álgebra deLie del grupo de Lie de números complejos diferentes a cero con la multiplicación usual) y para las matrices (puestoque M(n, R) con el conmutador regular es el álgebra de Lie del grupo de Lie GL(n, R) de todas las matricesinversibles).Porque la función exponencial es suryectiva en alguna vecindad N de e, es común llamar a los elementos del álgebrade Lie generadores infinitesimales del grupo G. De hecho, el subgrupo de G generado por N será el grupo entero Gsolamente cuando G sea conexo.La función exponencial y el álgebra de Lie determinan la estructura de grupo local de cada grupo de Lie conexo,debido a la fórmula de Campbell-Hausdorff: existe una vecindad U del elemento cero de g, tal que para u, v en U setiene
donde los términos omitidos son conocidos e implican los corchetes de Lie de cuatro o más elementos. En caso deque u y v conmuten, esta fórmula se reduce a la ley exponencial familiar exp(v) exp(u) = exp(u + v).Cada homomorfismo f: G → H de los grupos de Lie induce un homomorfismo entre las álgebra de Liecorrespondientes g y h. la asociación G|- > g es un funtor. La estructura global de un grupo de Lie no está totalmentedeterminada, en general, por su álgebra de Lie; vea la tabla abajo para los ejemplos de grupos de Lie diversos quecomparten la misma álgebra de Lie. Podemos decir sin embargo que un grupo de Lie conexo es simple, semisimple,resoluble, nilpotente, o abeliano si y solamente si su álgebra de Lie tiene la propiedad correspondiente.Si requerimos que el grupo de Lie sea simplemente conexo, entonces la estructura global está determinada por suálgebra de Lie: para cada álgebra de Lie g finito dimensional sobre F hay un único (módulo un isomorfismo) grupode Lie G simplemente conexo con g como álgebra de Lie. Por otra parte cada homomorfismo entre las álgebras deLie se eleva a un homomorfismo único entre los correspondientes grupos de Lie simplemente conexos.

Grupo de Lie 48
Lista de algunos grupos de Lie reales y de sus álgebras de Lie
grupo de Lie descripción Comentarios álgebra deLie
descripción dim/R
espacio euclídeo conadición
abeliano, simplementeconexo, no compacto
el corchete de Lie es cero n
números reales no nuloscon la multiplicación
abeliano, no conexo, nocompacto
el corchete de Lie es cero 1
números reales positivoscon la multiplicación
abeliano, simplementeconexo, no compacto
el corchete de Lie es cero 1
números complejos devalor absoluto 1 con lamultiplicación
abeliano, conexo, nosimplemente conexo,compacto
el corchete de Lie es cero 1
cuaterniones no nulos conla multiplicación
conexo, simplemente conexo,no compacto
cuaterniones, con el corchete de Lie dadopor el conmutador
4
cuaterniones de módulo 1con la multiplicación, una3-esfera
simplemente conexo,compacto, simple ysemi-simple, isomorfo a
y a
3-vectores reales, con el corchete de Lie elproducto vectorial; isomorfo a loscuaterniones con parte real cero, con elcorchete de Lie dado por el conmutadortambién isomorfo a y a
3
grupo general lineal:matrices reales n-por-ninvertibles
no conexo, no compacto matrices reales n-por-n, con el corchete deLie dado por el conmutador
matrices reales n-por-ncon determinante positivo
conexo, no compacto M(n, R) matrices reales n-por-n, con el corchete deLie dado por el conmutador
grupo especial lineal:matrices reales n-por-ncon determinante 1
conexo, no compacto y simplesi n>1
matrices reales n-por-n, con traza 0, con elcorchete de Lie dado por el conmutador
n²-1
grupo ortogonal: matricesreales n-por-n ortogonales
no conexo, compacto matrices reales n-por-n, antisimétricas, conel corchete de Lie dado por el conmutador;
es isomorfo a y acon el producto vectorial
n(n-1)/2
grupo especial ortogonal:matrices reales n-por-nortogonales condeterminante 1
conexo, compacto, nosimplemente conexo si n>1,semisimple, si n=3 o n ≥5simple
matrices reales n-por-n, antisimétricas, conel corchete de Lie dado por el conmutador
n(n-1)/2
grupo de espinores simplemente conexo,compacto, semisimple, si n=3o n ≥5 simple
matrices reales n-por-n, antisimétricas, conel corchete de Lie dado por el conmutador
n(n-1)/2
grupo simplécticoreal:matrices simplécticasreales
no compacto, simple ysemisimple
matrices reales que satisfacen JA + ATJ = 0donde J es la matriz anti-simétricaestándar
n(2n +1)
grupo simpléctico:matrices unitarias n-por-ncuaterniónicas
compacto, simplementeconexo, simple y semisimplesi n>0
sp(n) matrices cuaterniónicas cuadradas Asatisfaciendo A = −A*, con el corchete deLie dado por el conmutador
n(2n +1)
grupo unitario: matricescomplejas n-por-nunitarias
isomorfo a S¹ para n=1, nosimplemente conexo paran>0, compacto. Nota: este noes un grupo/álgebra de Liecomplejo
matrices complejas n-por-n, que cumplenA = -A*, con el corchete de Lie dado por elconmutador
n(n-1)/2 n²

Grupo de Lie 49
grupo especial unitario:matrices complejasn-por-n unitarias condeterminante 1
simplemente conexo,compacto y si n ≥2, simple ysemisimple. Nota: este no esun grupo/álgebra de Liecomplejo
matrices complejas , que cumplenA = -A* con traza 0, con el corchete de Liedado por el conmutador
n²-1
Lista de algunos grupos de Lie complejos y de sus álgebras de Lie
grupode Lie
descripción Comentarios álgebrade Lie
descripción dim/C
Cn espacio euclídeo con adición abeliano, simplemente conexo, nocompacto
Cn el corchete de Lie es cero n
C× números complejos no nulos con lamultiplicación
abeliano, conexo, no simplementeconexo, no compacto
C el corchete de Lie es cero 1
GL(n,C)
grupo general lineal: matricescomplejas n-por-n inversibles
simplemente conexo, no compacto M(n, C) matrices complejas n-por-n, con elcorchete de Lie dado por elconmutador
n²
SL(n,C)
grupo especial lineal complejo:matrices complejas n-por-n condeterminante 1
simple y semisimple, simplementeconexo si n>1, no compacto
sl(n, C) matrices complejas n-por-n, con traza0, con el corchete de Lie dado por elconmutador
n²-1
O(n, C) grupo ortogonal: matricescomplejas n-por-n ortogonales
no conexo n>1, compacto so(n, C) matrices complejas n-por-n,antisimétricas, con el corchete de Liedado por el conmutador
n(n-1)/2
SO(n,C)
grupo especial ortogonal: matricescomplejas n-por-n ortogonales condeterminante 1
conexo, no compacto, nosimplemente conexo si n>1, si n=3 on ≥5 simple y semisimple
so(n, C) matrices complejas n-por-n,antisimétricas, con el corchete de Liedado por el conmutador
n(n-1)/2
Sp(2n,C)
grupo simpléctico: matricessimplécticas complejas
no compacto, simple y semisimple sp(2n, C) matrices complejas que satisfacen JA+ ATJ = 0 donde J es la matrizanti-simétrica estándar
n(2n +1)
Lista de algunos grupos de Lie de dimensión infinita
grupo de Lie descripción Comentarios álgebra de Lie descripción dim/R
Difeomorfismos de no abelianode en relatividad general
Campos vectoriales sobre
Difeomorfismos de que conservan el volumen
no abelianode utilidad en hidrodinámica
Campos vectoriales sobre con divergencia nula

Grupo de Lie 50
Referencias• Adams, John Frank (1969), Lectures on Lie Groups, Chicago Lectures in Mathematics, Chicago: Univ. of
Chicago Press, ISBN 0-226-00527-5.• Hall, Brian C. (2003), Lie Groups, Lie Algebras, and Representations: An Elementary Introduction, Springer,
ISBN 0-387-40122-9.• Serre, Jean-Pierre (1965), Lie Algebras and Lie Groups: 1964 Lectures given at Harvard University, Lecture
notes in mathematics, 1500, Springer, ISBN 3-540-55008-9.
Teoría de categorías
Ejemplo de diagrama conmutativo.
La teoría de categorías es un estudio matemático que trata de axiomatizarde forma abstracta diversas estructuras matemáticas, como una sola,mediante el uso de objetos y morfismos.
Historia
La teoría de las categorías fue introducida en Topología algebraica, porSamuel Eilenberg y Saunders MacLane en 1942, en un importante paso parala transición desde homología a Teoría de la homología. Stanislaw Ulamafirma que existían ideas parecidas en la escuela polaca de los años 30 (verStanislaw Ulam). [1]
Los desarrollos subsiguientes de la teoría fueron impulsados por las necesidades computacionales del Álgebrahomológica y más tarde por las necesidad de axiomáticas en Geometría algebraica.[2] La teoría general -ciertaactualización del Álgebra universal con muchas características nuevas que daban pie a una cierta flexibilidad ensemántica y lógicas de orden superior- vino más tarde.
Estas aplicaciones de categorías en el campo de los fundamentos están siendo trabajadas en bastante detalle y nosolamente en matemáticas. Existen matemáticos como William Lawvere que trabajan en la física, existen físicostrabajando en n-categorías, John Baez, e incluso hay filósofos como Alain Badiou en Francia o Corfield en Inglaterraque se han visto obligados a poner sus "indagaciones" bajo las condiciones de la matemática contemporánea.La Lógica Categórica es ahora un campo bien definido basado en la teoría de tipos para la Lógica intuicionista, conaplicaciones a la teoría de la programación funcional y la teoría de dominios, todas enmarcadas en una categoríacartesianamente cerrada como descripciones no sintácticas del cálculo lambda. El uso del lenguaje de la teoría de lascategorías le permite a uno aclarar qué tienen exactamente en común todas estas áreas.
Relación FilosóficaSe elige el término categoría de Aristóteles pero en el sentido de Kant con la intención de asociarlo a una formapura pero en el contexto exclusivamente matemático, es decir, sin efectos fuera de las matemáticas.
CategoríasCon el concepto de categoría se pretende capturar -poniendo el énfasis en el concepto de relación, de aplicación, más que de elemento y pertenencia- la esencia de una clase de objetos matemáticos, que se relacionan mediante aplicaciones, los morfismos en la categoría en cuestión. Por ejemplo, la clase de los grupos. En vez de estudiar los objetos individuales (cada grupo) como se vino haciendo, se enfatizan dichos morfismos entre ellos, que no son otra cosa que las aplicaciones que "conservan su estructura". En el ejemplo de los grupos, dichos morfismos son los

Teoría de categorías 51
homomorfismos de grupos. Entonces, una vez que tenemos nuestro "universo categorial" definido -esto es, unacategoría- es posible relacionarla con otras categorías mediante funtores, que son cierta generalización del conceptode función para categorías: un funtor asocia a cada objeto de una categoría un objeto de la otra, y a cada aplicaciónde la primera una aplicación de la segunda. De cierto modo nos "plasma", nos lleva una imagen de la categoría haciala otra categoría y con ciertos grados de "afinamiento". Ciertas "construcciones naturales", como el grupofundamental de un espacio topológico, pueden ser expresadas como funtores. Además, dichos funtores están muy amenudo naturalmente relacionados y esto lleva al concepto de transformación natural.Categorías especiales, como los topos, están sirviendo también como alternativa "generalizadora" y conceptualmentemás rica de la teoría de conjuntos como fundamento de las matemáticas [cita requerida].
Aproximación de la teoría de clasesPara eliminar los problemas surgidos de las paradojas como la paradoja de Russell se planteó el siguiente parche a laTeoría de conjuntos:Llamaremos "clase" a una agrupación de objetos.Llamaremos "conjunto" a las clases capaces de ser, ellas mismas, objetos de otras clases.Llamaremos "clase propia" a las clases incapaces de ser objetos de otra clase.
Definición de categoríaes una categoría si tiene:
1) una clase de objetos de , llamado .2) , para todo , un conjunto de morfismos de en , llamado , sus
elementos se escriben como o también .3) , para todo , y para todo , se cumplelas siguientes propiedades:
a) existe tal que , es decir, tenemos la aplicación
b) propiedad asociativa en la composición, es decir , para todo .c) existencia del morfismo identidad tal que y .
NotaSi las clases de objetos son solamente conjuntos, se dice que la categoría es "pequeña" (small category).Existen importantes categorías que no lo son.

Teoría de categorías 52
Definición de subcategoríaDadas dos categorías y , diremos que es una subcategoría de si:
i) es subclase de ii) iii)
iv) .nota
Diremos que la subcategoría es llena si
Ejemplos básicosDe cada categoría se da el nombre, objetos que forman la clase y morfismos propios entre dichos objetosrespectivamente:• La categoría Con, de todos los conjuntos y aplicaciones entre estos.
• La categoría Top, de todos los espacios topológicos y las aplicaciones continuas entre éstos.
y • La categoría G, de todos los grupos y los homomorfismos entre éstos.
y • La categoría Gab, de todos los grupos abelianos y los homomorfismos entre éstos.
y • La categoría VecK, de todos los espacios vectoriales sobre un cuerpo K y las aplicaciones lineales entre
éstos.
y • La categoría An, de todos los anillos y las aplicaciones entre estos.
y • La categoría Anc, de todos los anillos conmutativos y las aplicaciones entre estos.
y • Dado un conjunto parcialmente ordenado, , hay una categoría , de todos los elementos de , y,
, el conjunto de morfismos viene dado por:
• Dada una categoría , hay una categoría llamada dual o opuesta , con la misma clase de objetos y,
• Dadas dos categorías y , hay la categoría producto , de clasey de morfismos
• La categoría ModR de todos los módulos por la derecha sobre el anillo R con unidad, junto con sushomomorfismos de módulos. Análogamente, la categoría de los módulos por la izquierda.
• La categoría Met de todos los espacios métricos junto a las funciones cortas.• La categoría Uni de todos los espacios uniformes junto a los unimorfismos.
• La categoría Ord de todos los conjuntos preordenados junto a las funciones crecientes.

Teoría de categorías 53
• Una categoría monoidal es una categoría con una operación asociativa y un único elemento neutral con éstaoperación. Los ejemplos prototípicos son la categoría de conjuntos con la operación: unión disjunta y elconjunto vacío como elemento neutro, y la categoría de espacios vectoriales sobre un cuerpo con el productotensorial de espacios vectoriales y el mismo cuerpo como el único elemento neutral.
• Un grafo se puede considerar como una categoría pequeña: los objetos serían los vértices del grafo y losmorfismos los caminos en el grafo. La composición de morfismos es la concatenación de caminos.
• Si I es un conjunto, la categoría: categoría discreta sobre I es la categoría pequeña que tiene como objetos a loselementos de I y como morfismos únicamente a los morfismos identidad (que hay en toda categoría, comorecordaréis).
• La categoría Mag de todos los magmas junto con sus homomorfismos.• La categoría Med de todos los magmas mediales junto con sus homomorfismos.
• La cat Mon, de los monoides y sus monoide-morfismos. Usadas en TQFT, álgebras de Frobenius, cobordismo.
Definiciones para tipos de morfismosDada una categoría y objetos , diremos que un morfismo es :• monomorfismo si y tales que siempre sucede que o implica
que .• epimorfismo si y tales que siempre sucede que o implica
que .• isomorfismo si y .• endomorfismo si • automorfismo si es un isomorfismo y
Proposición
Dada una categoría , objetos y se cumplen:• y tal que es un monomorfismo, implica que es un monomorfismo.• y tal que es un epimorfismo, implica que es un epimorfismo.• isomorfismo, implica que es monomorfismo y epiporfismo.
Demostración
Para el primero, ver que es un monomorfismo:Tomando tales que , entonces también , por 3)b) de ladefinición de categoría, tenemos que y como es monomorfismo, implica que ytenemos por definición que es un monomorfismo.
Lo mismo para el segundo, ver que es epimorfismo:Tomando tales que , entonces también , por 3)b) de ladefinición de categoría, tenemos que y como es un epimorfismo, implica que ytenemos por definición que es un epimorfismo.
Para el tercero, si tal que y Tomando tales que , entonces tambíen , por 3)b) de ladefinición de categoría, tenemos que y como , implica que , implicaque , e implica que es un monomorfismo..Tomando tales que , entonces tambíen , por 3)b) de ladefinición de categoría, tenemos que y como , implica que , implicaque , e implica que es un epimorfismo.
Nota

Teoría de categorías 54
Existen morfismos que son monomorfismos y epimorfismos que no son isomorfismos.
Definiciones para tipos de objetosDada una categoría , diremos que un objeto es:• inicial si • final, si • cero, si es inicial y terminal a la vez.
Ejemplos• En la categoría Con, el Conjunto vacío es un objeto inicial, y todo conjunto formado con un único elemento es un
objeto final en la categoría de conjuntos.
ProposiciónDada una categoría , entre sus objetos iniciales/finales hay un único isomorfismo.
Demostración
Dados y objetos iniciales/finales, entonces los siguientes conjuntos de morfismos solo tienen un elemento:
como entonces y como entonces , por tanto entre y hay unúnico isomorfismo.
Definición de funtorDadas dos categorías y , diremos que es:• funtor covariante si:
1), , tenemos que .2), , tenemos que talque:
a), , tenemos que .b), ,
.• funtor contravariante si:
1), , tenemos que .3), , tenemos que talque:
a), , tenemos que .b), ,
.Nota

Teoría de categorías 55
Dadas tres categorías , y dos funtores covariantes y , la composiciónes el funtor covariante tal que:
• , • , .
Ejemplos• Dada una categoría , diremos que es el funtor identidad a si deja todo igual, claramente
es un funtor covariante recurriendo a la definición.• Dadas una categoría y una subcategoría de , diremos que es funtor inclusión si deja
todo igual, claramente es funtor covariante recurriendo a la definición.
Definiciones para tipos de funtoresDadas dos categorías y , diremos que un funtor covariante es:
• pleno si, es exhaustivo.• fiel si, es inyectivo.• plenamente fiel si, es biyectivo.• denso si, es isomorfo a .Dado un funtor covariante , diremos que es un isomorfismo de categorías, si
y .
Definición de transformación naturalDadas dos categorías , , y dos funtores covariantes y , hay unatransformación natural entre y si tiene:
• , , un morfismo • , , es decir, el siguiente diagrama es conmutativo:
Diremos que un morfismo es una equivalencia si es un isomorfismo.Diremos que un funtor es una equivalencia si existe un funtor tal que y
, donde diremos que las dos categorías son equivalentes.
EjemplosEspacio vectorial dual: un ejemplo de un funtor contravariante desde la categoría de todos los espacios vectorialesreales a la categoría de todos los espacios vectoriales reales está dado por la asignación a cada objeto (cada espaciovectorial real) un objeto llamado espacio dual y a cada morfismo (esto es, a cada aplicación lineal), su dual otraspuesta.Álgebra de las funciones continuas: un funtor contravariante desde la categoría de los espacios topológicos (cuyosmorfismos son las aplicaciones continuas) a la categoría de las álgebras asociativas reales, es dado asignando a cadaespacio topológicoX el álgebra C(X) de todas las funciones reales continuas sobre tal espacio. Cada aplicacióncontinua f : X → Y (morfismo en la categoría de espacios topológicos) induce un homomorfismo de álgebras C(f) :C(Y) → C(X) mediante la regla C(f)(φ) = φ o f para todo φ en C(Y).
Teoría de categorías 56
Homomorfismo de grupos: a cada par A, B de grupos abelianos se puede asignar el grupo abeliano Hom(A,B) queconsiste en todos homomorfismos de grupos desde A a B. Esto es un funtor que es contravariante en el primerargumento y covariante en el segundo, esto es, es un funtor Abop x Ab → Ab (donde Ab denota la categoría de losgrupos abelianos con los homomorfismos de grupos). Si f : A1 → A2 and g : B1 → B2 son morfismos en Ab, entoncesse tiene este homomorfismo Hom(f,g) : Hom(A2,B1) → Hom(A1,B2) dado por φ |→ g o φ o f.Funtores 'Olvido', o 'Forgetful': el funtor F : Ring → Ab que aplica un anillo hacia su grupo subyacente abelianoes un funtor que olvida ("forgetful"), que nos crea una imagen de algo más "rico" en un objeto más pobre, con menosestructura. Los morfismos en la categoría de Anillos (homomorfismos de anillos) se convierten en morfismos en Ab(la categoría de grupos abelianos y sus homomorfismos).Productos tensoriales: Si C denota la categoría de los espacios vectoriales sobre un cuerpo fijado, con lasaplicaciones lineales como morfismos, entonces el producto tensorial V [símbolo] W define un funtor C × C → Cque es covariante en ambos argumentos.Álgebras de Lie: A cada grupo de Lie real o complejo se le asigna su real (o compleja) Álgebra de Lie, con lo quese define un funtor.Grupo fundamental: Considera la categoría de los espacios topológicos con "puntos base", con "puntosdistinguidos". Los objetos son los pares (X,x), donde X es un espacio topológico y x es un elemento de X. Unmorfismo desde (X,x) hacia (Y,y) viene dado por una aplicación continua f : X → Y tal que f(x) = y.Para cada espacio topológico con punto base (X,x), definiremos un grupo fundamental. El cual va a ser un funtordesde la categoría de los espacios topológicos con puntos base hacia la categoría de los grupos.Sea f una función continua desde el intervalo unidad [0,1] hacia X tal que f(0) = f(1) = x. (Esto es equivalente a que, fsea una aplicación continua desde el círculo unidad en el plano complejo tal que f(1) = x.) Llamamos a tal función unlazo en X. Si f y g son lazos en X, podemos pegarlos uno a continuación del otro definiendo h(t) = f(2t) cuando trecorra [0,0.5] y h(t) = g(2(t - 0.5)) cuando t recorra [0.5,1]. Es fácil comprobar que este h también es un lazo. Siexiste una aplicación continua F(x,t) desde [0,1] × [0,1] a X tal que f(t) = F(0,t) es un lazo y g(t) = F(1,t) es tambiénun lazo entonces se dice que f y g son equivalentes. Se puede probar que esto define una relación de equivalencia.Nuestra regla de composición asegura que todo vaya bien. Ahora, además, podemos ver que se tiene un elementoneutro e(t) = x (una aplicación constante) y que cada lazo tiene un lazo inverso. De hecho, si f(t) es un lazo entoncesf(1 - t) es su inverso. El conjunto de clases de equivalencia de lazos forma entonces un grupo (el grupo fundamentalde X). Se puede comprobar que la aplicación desde la categoría de espacios topológicos con punto base a la categoríade grupos es funtorial: un (homo/iso)morfismo topológico se hará corresponder naturalmente a un(homo/iso)morfismo de grupos.Teoría de haces: prehaces. Si X es un espacio topológico, entonces los conjuntos abiertos en X pueden serconsiderados como los objetos de una categoría CX; existiendo un morfismo de U a V si y sólo si U es unsubconjunto de V. En sí misma, esta categoría no es muy excitante, pero los funtores desde CX
op hacia otrascategorías, llamados pre-haces sobre X, son interesantes. Por ejemplo, asignando a cada conjunto abierto U elálgebra asociativa de las funciones reales sobre U, se obtiene un pre-haz de álgebras sobre X.Este ejemplo de motivación se generaliza mediante la consideración de pre-haces sobre categorías arbitrarias: unpre-haz sobre C es un funtor definido sobre Cop. El Lema de Yoneda da cuenta de que a menudo una categoría Cpuede extenderse mediante la consideración de la categoría de pre-haces sobre C.La Categoría de las categorías pequeñas: La categoría Cat posee como objetos a todas las categorías pequeñas, ycomo morfismos a los funtores entre ellas.

Teoría de categorías 57
Construcciones universalesLos funtores son a menudo definidos por medio de propiedades universales; como ejemplos tenemos los productostensoriales de arriba, la suma directa y el producto directo de grupos o de espacios vectoriales, la construcción de losgrupos libres módulos, y límites directos e inversos. Los conceptos de límite y colímite generalizan múltiplesconceptos. Las construcciones universales a menudo dan lugar a pares de funtores adjuntos.
Producto
Dada una categoría y una familia de objetos , llamaremos producto de al pardonde y es una familia de morfismos donde , y tal
que satisface la condición de que para cada familia , donde , existe un únicomorfismo tal que
El producto se nota por y en particular tambien si
Coproducto
Dada una categoría y una familia de objetos , llamaremos coproducto de al pardonde y es una familia de morfismos donde , y tal
que satisface la condición de que para cada familia , donde , existe un únicomorfismo tal que
El producto se nota por

Teoría de categorías 58
Otros conceptos y resultadosLas definiciones de categorías y funtores nos proveen sólo de la base inicial del álgebra categorial. Los tópicoslistados abajo son muy importantes. Aunque hay fuertes interrelaciones entre todos ellos, el orden en que los damospuede ser considerado una guía para posteriores lecturas.• transformación natural: Mientras los funtores dan un camino para pasar, imprimir una categoría en otra, las
transformaciones naturales nos proveen de una relación similar entre funtores.• El Lema de Yoneda es uno de los resultados más famosos de la teoría de categorías.• Límites y colímites: Para introducir ciertas construcciones como los productos (de conjuntos, de topologías, de
órdenes parciales, ...), en la teoría, los límites y los colímites son de ayuda.• funtores adjuntos: Un funtor puede ser el adjunto por la izquierda (o por la derecha) de otro funtor que vaya en la
dirección opuesta. Sin embargo, cuando los comparamos con las relaciones clásicas de las aplicaciones quepreservan las estructuras (inversas...), el concepto de adjunción de funtores aparenta ser bastante abstracto ygeneral. Es de gran utilidad aún y tiene relación con muchos otros conceptos importantes, como ocurre en laconstrucción de límites.
• equivalencia de categorías: Para obtener un criterio adecuado para discernir si dos categorías pueden o no serconsideradas similares, es necesario encontrar una noción más general que el concepto clásico de isomorfismo.Las equivalencias de categorías están muy relacionadas con dualidad de categorías.
• diagramas conmutativos: Ya que la teoría de categorías trata usualmente con objetos y flechas es convenienteexpresar las identidades mediante diagramas.
Referencias[1][1] .[2][2] .
BibliografíaLos dos textos de Lawvere son las introducciones más sencillas que existen. El de Mac Lane es uno "clásico" en estamateria, y el Borceaux es una pequeña enciclopedia.• William Lawvere & Steve Schanuel, Matemáticas Conceptuales: Una primera introducción a categorías, Siglo
XXI, 2002 (traducción de Marmolejo Rivas, Francisco a partir de Conceptual Mathematics: A First Introductionto Categories, Cambridge University Press, Cambridge, 1997).
• William Lawvere & Steve Schanuel, Sets for mathematics, Cambridge University Press, 2003.• Saunders Mac Lane (1998): Categories for the Working Mathematician, Graduate Texts in Mathematics 5,
Springer; ISBN 0-387-98403-8• Francis Borceux. Handbook of Categorical Algebra, volumes 50-52 of Encyclopedia of Mathematics and its
Applications. Cambridge University Press, 1994.• Juan Francísco Escamilla Castillo. Introducción al Álgebra Abstracta, Lulu.• A. J. Berrick & M. E. Keating. Categories and Modules. Cambridge University Press. 2000.

Teoría de categorías 59
Enlaces externos• Primera presentación: http:/ / www. jstor. org/ pss/
1990284?searchUrl=%2Faction%2FdoBasicSearch%3FQuery%3Dcategory%2BSaunders%2BMacLane%2BSamuel%2BEilenberg%26gw%3Djtx%26prq%3Dcategory%2BSaunders%2BMacLane%26hp%3D25%26wc%3Don•• Un proyecto en castellano que pretende comenzar la divulgación en castellano es el de:http:/ / arrows. ourproject. org/• "Category Theory" artículo en inglés de Jean-Pierre Marquis en la Stanford Encyclopedia of Philosophy (http:/ /
plato. stanford. edu/ entries/ category-theory/ ).• Category Theory. (http:/ / planetmath. org/ ?op=getobj& amp;from=objects& amp;id=) en PlanetMath
Análisis complejo
Gráfico de la función f(z)=(z2-1)(z-2-i)2/(z2+2+2i). La coloraciónrepresenta el argumento de la función, mientas que el brillo
representa el módulo.
El análisis complejo es la rama de las matemáticas queen parte investiga las funciones holomorfas, tambiénllamadas funciones analíticas. Una función esholomorfa en una región abierta del plano complejo siestá definida en esta región, toma valores complejos ypor último es diferenciable en cada punto de esta regiónabierta con derivadas continuas.
El que una función compleja, sea diferenciable en elsentido complejo tiene consecuencias mucho másfuertes que la diferenciabilidad usual en los reales. Porejemplo, toda función holomorfa se puede representarcomo una serie de potencias en algún disco abiertodonde la serie converge a la función. Si la serie depotencias converge en todo el plano complejo se diceque la función es entera. Una definición equivalentepara función holomorfa es: una función compleja sobrelos complejos que puede ser representada como unaserie de potencias. Esta definición es la más comúnpara funciones holomorfas de varias variables. Enparticular, las funciones holomorfas son infinitamente diferenciables, un hecho que es marcadamente diferente de loque ocurre en las funciones reales diferenciables. La mayoría de las funciones elementales como lo son, por ejemplo,algunos polinomios, la función exponencial y las funciones trigonométricas, son holomorfas.

Análisis complejo 60
Historia
Augustin Louis Cauchy, uno de losgrandes precursores del análisis
complejo.
El análisis complejo es una de las ramas clásicas de las matemáticas que tienesus raíces más allá del siglo XIX. Los nombres destacados en su desarrolloson Euler, Gauss, Riemann, Cauchy, Weierstrass y muchos más en el sigloXX. Tradicionalmente, el análisis complejo, en particular la teoría de lasaplicaciones conformes, tiene muchas aplicaciones en ingeniería, pero esampliamente usada también en teoría de números analítica. En tiemposmodernos se convirtió en popular gracias al empuje de la dinámica complejay los dibujos de fractales, producidos por la iteración de funcionesholomorfas, de los cuales el más popular es el conjunto de Mandelbrot. Otrasaplicaciones importantes del análisis complejo son las de la teoría de cuerdas,una teoría de campos cuánticos conforme-invariante.
Resultados principales
Integrales de contorno
Una herramienta de central importancia en el análisis complejo es la integral de contorno. La integral de una funciónque sea holomorfa sobre y en el interior de un camino cerrado es siempre cero. Esto es el Teorema integral deCauchy. Los valores de una función holomorfa dentro de un disco pueden ser hallados mediante una integral decontorno sobre la frontera del disco (fórmula integral de Cauchy). Las integrales de contorno en el plano complejo seusan a menudo para encontrar integrales reales complicadas, y para esto es útil la teoría de los residuos. Si unafunción tiene un una singularidad en algún punto (o número finitos de ellos), que quiere decir que sus valores"estallan", que no tiene un valor finito en tales puntos, entonces se puede definir el residuo de la función en dichasingularidad, y estos residuos pueden ser usados para calcular integrales aparentemente difíciles de una manerasencilla, este es el contenido del poderoso teorema de los residuos. El curioso comportamiento de las funcionesholomorfas cerca de las singularidades esenciales es descrito por el teorema de Weierstrass-Casorati. Las funcionesque tienen sólo polos (un tipo de singularidad de funciones racionales donde el polinomio denominador tiene unnúmero finito de ceros) y no singularidades esenciales se dicen meromorfas.
Series de LaurentLas series de Laurent son similares a las series de Taylor pero pueden ser usadas para estudiar el comportamiento delas funciones cerca de las singularidades.
Teorema de LiouvilleUna función acotada que sea holomorfa en el plano complejo debe ser constante; esto es el Teorema de Liouville,que puede usarse para dar una prueba natural y breve del Teorema fundamental del álgebra, que dice que el cuerpode los números complejos es un cuerpo algebraicamente cerrado.
Continuación analíticaUna propiedad importante de las funciones holomorfas es que si una función lo es en un dominio simplemente conexo entonces sus valores están completamente determinados por sus valores sobre cualquier subdominio más pequeño. La función sobre el dominio más grande se diría que está analíticamente continuada, que es la continuación desde sus valores en el dominio más pequeño. Esto permite extender, a casi todo el plano, la definición de funciones como la función ζ de Riemann que están inicialmente definidas en términos de sumas infinitas que convergen sólo

Análisis complejo 61
sobre dominios limitados. Algunas veces, como en el caso del logaritmo natural, es imposible continuaranalíticamente una función holomorfa a un dominio conexo no simple en el plano complejo, pero es posibleextenderla a una función holomorfa sobre una superficie íntimamente relacionada conocida como superficie deRiemann.
OtrosExiste también una rica teoría en el caso de más de una dimensión compleja, donde las propiedades analíticas comolas de expansión en series de potencias permanece aún cierta pero que sin embargo la mayoría de las propiedadesgeométricas de las funciones en una dimensión compleja (como la de transformación conforme) ya no lo son. Elteorema de representación conforme de Riemann sobre las relaciones conformes de ciertos dominios en el planocomplejo, que puede ser el resultado más importante en la teoría unidimensional, falla totalmente en dimensionesmayores.
Enlaces externos• Weisstein, Eric W. «Complex Analysis [1]» (en inglés). MathWorld. Wolfram Research.
Referencias[1] http:/ / mathworld. wolfram. com/ ComplexAnalysis. html
Clase característicaEn matemáticas, una clase característica es un elemento del módulo de cohomología de un espacio topológico yque satisfacen ciertos axiomas considerando varias de ellas. Son un concepto unificador entre la topologíaalgebraica, geometría diferencial y geometría algebraica. La teoría explica, en términos muy generales, por qué losfibrados no siempre pueden tener secciones. Es decir las clases características son invariantes globales que miden ladesviación de una estructura de producto local de una estructura de producto global.
DefiniciónSea G un grupo, y para un espacio topológico X, escríbase bG(x) para el conjunto de las clases de isomorfismo deG-fibrados principales. Esto es un funtor de Top a Set, enviando una función f a la operación f* del pullback. Unaclase característica c de G-fibrados principales es entonces una transformación natural de bG a un funtor H* decohomología, visto también como funtor a Set.Es decir deseamos asociar a cualquier G-fibrado principal P → X un elemento c(P) en H *(X) tal que, si f: Y → X esuna función continua, entonces c(f* P) = f* c(P). A la izquierda está la clase del pullback de P a Y; a la derecha está laimagen de la clase de P bajo la función inducida en cohomología.

Clase característica 62
MotivaciónLas clases características son un medio para medir que tan lejos un fibrado discrepa del trivial. También sonfenómenos de la teoría cohomológica de modo en que para una sección (matemática) y para decidir su existencia,necesitamos esa variancia.Las clases características desde su infancia en los años 30 (como parte de teoría de la obstrucción) era una razónimportante por la que una teoría 'dual' a la homología fue buscada: La cohomología. El enfoque de clasescaracterísticas a los invariantes de la curvatura era una razón particular para hacer una teoría, también probar unteorema de Gauss-Bonnet generalizado.Cuando la teoría fue puesta en una base organizada alrededor de 1950 (con las definiciones reducidas a la teoríahomotópica) llegó a estar claro que las clases características más fundamentales conocidas en aquella época (la clasede Stiefel-Whitney, la clase de Chern, y las clases de Pontryagin) eran reflejos de los grupos lineales clásicos y laestructura de su toro maximal. Lo que es más, la clase de Chern misma no era tan nueva, siendo reflejada en elcálculo de Schubert en Grassmannianas, y en el trabajo de la escuela italiana de geometría algebraica. Por otra parteahora había un marco que producía familias de clases, siempre que hubiera un fibrado vectorial implicado.El mecanismo primordial entonces parecía ser éste: dado un espacio X que llevaba un fibrado vectorial, elloimplicaba en la categoría homotópica una función de X a un espacio clasificante BG, para el grupo lineal relevanteG, Para la teoría de homotopía la información relevante está en subgrupos compactos tales como los gruposortogonales y grupos unitarios como G. Ésta sigue siendo la explicación clásica, aunque en una teoría geométricadada es provechoso tomar la estructura adicional en cuenta. Cuando la cohomología llegó a ser 'extraordinaria' con lallegada de la K-teoría y de la teoría del cobordismo de 1955 en adelante, solamente era necesario cambiar la letra Hpor todas partes para determinar las clases características.Las clases características se determinaron más adelante para las foliaciones de variedades; tienen (en un sentidomodificado, para las foliaciones con algunas singularidades permitidas) una teoría del espacio clasificante en lateoría de homotopía.En un trabajo posterior al rapprochement de las matemáticas y la física, nuevas clases características fueronencontradas por Simon Donaldson y Dieter Kotschick en la teoría del instantón. El trabajo y el punto de vista deChern también se han mostrado importantes: véase las Formas de Chern-Simons.

Derivada covariante 63
Derivada covariante
El transporte paralelo de un vector a lo largo deuna curva cerrada sobre la esfera, que al igual queel concepto de derivada covariante se basa en lanoción de conexión matemática. El ángulo
después de recorrer una vez la curva esproporcional al área dentro de la curva.
La derivada covariante ( ) es una generalización del concepto dederivada parcial ( ) que permite extender el cálculo diferencial sobre
con coordenadas cartesianas al caso de coordenadas curvilíneas en(y también al caso todavía más general de variedades
diferenciables).
IntroducciónIntroduciremos primero el caso de . Supongamos que tenemos n campos vectoriales que en cada punto formanuna base vectorial y un campo vectorial contravariante adicional de tal manera que este campo puedeexpresarse en términos de la base anterior:
Donde son las componentes del vector en dicha base. Si se usan coordenadas curvilíneas , los vectorestangentes a las curvas coordenadas cambian de punto a punto. Eso implica que aún cuando el campo vectorial seaconstantes en general sus coordenadas en la base elegida no serán constantes y en general sucederá que la derivadacovariante ( ):
Ya que también es necesario considerar la variación de orientación de la base vectorial al pasar de un punto a otro, esdecir, para evaluar la derivada (covariante) anterior necesitamos evaluar:
(1)
Donde el término segundo adicional da cuenta de como cambia la base vectorial al recorrer una línea coordenada curvilínea. Es decir cuando se usan coordenadas cartesianas en las líneas coordenadas son líneas rectas paralelas a los ejes coordenados, y de alguna manera en cada punto la base vectorial escogida para medir las coordenadas de un campo vectorial en todos los puntos están "sincronizadas". Pero en coordenadas curvilíneas al pasar de un punto a otro, los vectores tangentes a las líneas coordenadas usados como base no coindirán de un punto a otro y es necesario

Derivada covariante 64
computar su variación al cambiar de punto. En general los vectores no sólo dependen del punto es necesarioespecificar como se "conectan" los vectores en diferentes puntos y para ello se define una conexión que en el caso de puede representarse como un conjunto de coeficientes:
(2)
Los coeficientes se llaman símbolos de Christoffel y definen localmente la conexión. Juntanto los resultados de(1) y (2) la derivada covariante parcial de un campo vectorial puede expresarse mediante:
(3a)
Usando el convenio de sumación de Einstein y renombrando los índices la expresión anterior puede escribirsesimplemente como:
(3b)
La expresión entre paréntesis representa las componentes de la derivada covariante del vector contravariante .Análogamente dada una curva se define la derivada covariante temporal a lo largo de dicha curvacomo:
Caso euclídeoLa necesidad de la generalización de la derivada ordinaria en se aprecia cuando su usan coordandas curvilíneascomo se ha dicho. Basta el movimiento de una partícula expresado en coordenadas cartesianas y luego el mismomovimiento expresado en coordenadas polares, por ejemplo, consideremos una masa puntual que se mueve a lolargo de la trayectoria recta por:
Es decir, el punto se mueve con una velocidad uniforme a lo largo de una recta, esto puede verse de manerasencilla, si se calculan las velocidades y las aceleraciones de la partícula:
Donde se ha usado la notación y .Ahora consideramos el cálculo de la aceleración en coordenadas polares. Como la partícula se mueve sobre una rectala partícula la distancia al origen y el ángulo polar estarán relacionados mediante la relación:

Derivada covariante 65
Las coordenadas de la velocidad de la partícula en estas coordenadas pueden determinarse mediante cálculo directo ocambiando de base a partir de la componentes cartesianas:
Puesto que la partícula se mueve a velocidad constante el vector aceleración debería resultar nulo. De acuerdo a lodiscutido anteriormente, las componentes del vector aceleración pueden obtenerse mediante las coordenadascovariantes:
Es importante notar como en este caso las derivadas parciales ordinarias no coinciden con las componentes de laaceleración:
Ya que en coordenadas polares los vectores de la base varían de punto a punto, y es por ello que sólo usando laderivada covariante se obtiene un vector de aceleración nulo tal como cabía esperar a partir del cálculo encoordenadas cartesianas.
Caso generalEn una variedad diferenciable o una hipersuperficie de , por otra parte, el concepto de derivada direccional sedefine a partir del espacio tangente a cada punto. En el caso general al presentar la variedad o la hipersuperficiecurvatura, los espacios tangentes de cada punto difiere del de los puntos cercanos y por tanto se necesita algunamanera de "conectar" o identificar vectores de diferentes espacios vectoriales, mediante una conexión sobre lavariedad.En una variedad riemanniana comúnmente se escoge una conexión (sin torsion) que sea compatible con la métrica,expresada por las componentes del tensor métrico , en el sentido de que:

Derivada covariante 66
Derivada covariante de un tensorEn las secciones anteriores la discusión de la derivada covariante se ha limitado a un campo vectorial contravariante.Pero la derivada covariante puede extenderse a otros tipos de campos tensoriales definidos sobre una variedad deRiemann. Para extender la definición usa el hecho de que la derivada parcial de un escalar coincide con la derivadacovariante parcial de dicho escalar, es decir:
Así para calcular la derivada covariante parcial de una 1-forma se considera su contracción con un campovectorial contravariante y teniendo en cuenta que la derivada covariante en una derivación para la cual vale la regladel producto:
Esto lleva a la siguiente relación entre componentes:
Para un tensor de tipo (p,q) general se tendrá:
PropiedadesEn lo anterior se ha considerado la noción de derivada covariante de manera naturalista extendiendo a coordenadascurvilíneas la noción de derivada parcial, ese enfoque conduce a un operador de derivación covariante con lassiguientes propiedades:
1. Linealidad: Para todo A y B de y cualesquiera :
2. Regla de Leibniz:3.3. Comutatividad con la contracción:4. Consistencia con la noción de vector tangente:Otra posibilidad es definir una derivada covariante más formalmente es construir un operador que satisfaga porconstrucción las propiedades anteriores.
Referencia
Bibliografía• Robert M. Wald, General Relativity, Chicago University Press, ISBN 0-226-87033-2.
Tensor de curvatura 67
Tensor de curvaturaEn geometría diferencial, el tensor de curvatura de Riemann , o simplemente tensor de curvatura o tensor deRiemann, supone una generalización del concepto de curvatura de Gauss, definido para superficies, a variedades dedimensiones arbitrarias. Representa una medida de la separación de la métrica de la variedad respecto de la métricaeuclídea.Fue introducido en 1862 por Riemann y desarrollado en 1869 por Christoffel como una forma de describircompletamente la curvatura en cualquier número de dimensiones mediante un "pequeño monstruo": un tensor de tipo(1,3) representado generalmente por el símbolo . El valor de cualquier otra entidad que describa la curvatura
de una variedad puede deducirse de este tensor. Tal es el caso del tensor de Ricci (un tensor de tipo (0,2)), de lacurvatura escalar o de la curvatura seccional.Aunque en 2 dimensiones la curvatura puede representarse por un escalar en cada punto (o tensor de orden cero), talcomo hacía la curvatura de Gauss, la geometría de variedades de Riemann con dimensión mayor o igual que 3 esdemasiado compleja como para describirla totalmente por un número en un punto dado. Así, en 3 dimensiones lacurvatura puede representarse por un tensor de segundo orden (el tensor de Ricci). Sin embargo, para dimensionessuperiores necesitaremos al menos un tensor de cuarto orden (el tensor de Riemann).El tensor de curvatura tiene una influencia notable en la evolución de la separación de un conjunto de geodésicasinicialmente próximas, vía la ecuación de Jacobi. Da lugar a efectos observables de la curvatura en las fuerzas demarea que aparecen en relatividad general.
DefiniciónFormalmente, el tensor de curvatura está definido para toda variedad de Riemann, y, más generalmente, en todavariedad dotada de una conexión afín con o sin torsión, por la fórmula siguiente:
donde [ , ] nota el corchete de Lie.Esta definición nos lleva a representar la curvatura es como un tensor (1,3)-valente. En geometría de Riemann, lavalencia de este tensor se puede alterar: a menudo usaremos una representación equivalente como tensor (0,4).Aunque sea la definición que aparece con más frecuencia, el operador , históricamente no apareció hasta 1954.Entre tanto, se desarrolló el formalismo de Cartan, en que la conexión se expresa como una matriz de 1-formas y lacurvatura como una matriz Ω de 2-formas.
Expresión en coordenadas
Dada una base cualquiera , definida como una sección del fibrado tangente, y su base dual
las coordenadas del tensor de curvatura vienen dadas por:
En un sistema de coordenadas asociada a una carta local las componentes del tensor de curvatura de Riemannvienen dadas por:
(*)
Donde son los campos vectoriales asociados a cada una de las coordenadas y que juntos constituyenuna base natural. La expresión (*) puede reescribirse en términos de de los símbolos de Christoffel de la siguientemanera, usando el convenio de sumación de Einstein:

Tensor de curvatura 68
Forma covariante del tensor de curvaturaSi es una variedad riemanniana, el tensor de curvatura vendrá definido a partir de la conexión de Levi-Civita. Eltensor métrico podrá utilizarse para subir o bajar índices del tensor de curvatura. En particular, la versióncompletamente covariante del tensor es un tensor de tipo (0,4) dado por
Existen distintas definiciones de este tensor, equivalentes salvo en signo, lo que nos obliga a tener que determinar encada caso la convención de signo del autor. En contraste, el resto de definiciones de todos los autores se ajustan paraque las nociones de curvatura seccional, de Ricci o escalar permanezcan inalteradas.[1]
Expresión como conjunto de 2-formasLa conexión matemática de una variedad diferenciable y fijada una base del espacio tangente en cada punto
cualquier puede expresarse mediante una matriz de 1-formas que satisfacen la siguiene relación conla derivada covariante:
Donde:
son campos vectoriales definidos sobre la variedad:Puede probarse además que si es la base dual de la anterior la diferencial exterior de los elementos de estabase dual satisfacen:
Donde:es el conjunto de n 2-formas de torsión
que son nulas si se usa la conexión riemanniana asociada a la métrica de Riemann de la variedad. Las 2-formas decurvatura vienen dadas simplemente por:
En general, el procedimiento de cálculo mediante las 1-formas de la conexión y 2-formas de curvatura resulta máseficiente y rápido que el cálculo directo mediante la expresión en coordenadas.
Significado del tensor de curvatura en una variedad de Riemann
Como medida de la separación de la métrica respecto de la métrica euclídeaUna relación interesante que aclara el significado del tensor de curvatura es que si se consideran coordenadasnormales centradas en un punto p en un entorno de dicho punto la métrica de toda variedad riemanninapuede escribirse como:
Es decir el tensor de Riemann da las desviaciones de la métrica respecto a la métrica euclídea plana hasta segundoorden. En una variedad lorentziana la relación es similar:

Tensor de curvatura 69
Como transformación lineal de 2-formasPara ver R como transformación lineal de 2-formas, considere la curvatura seccional, es decir la curvatura de unasuperficie geodésica de dos dimensiones que pasa a través de un punto - una sección, que es la imagen de un planotangente bajo la función exponencial. El correspondiente plano tangente se puede representar por 2-formas. El tensorde curvatura da información equivalente a especificar todas las curvaturas seccionales. La norma cuadrada de una2-forma por la curvatura seccional correspondiente de hecho da una nueva forma cuadrática en un espacio de2-formas, y es dada exactamente por el operador lineal simétrico R. es decir (R(s), s) = k(s)(s, s).El operador R puede ser entendido de otra manera. Cada 2-forma se puede representar por un lazo rectangularpequeño (de muchas maneras, pero de la forma correspondiente es lo qué importa aquí). Entonces el transporteparalelo alrededor de este lazo da lugar a una transformación del espacio tangente. Ésta es una transformacióninfinitesimal del espacio tangente, que se puede representar por un elemento del álgebra de Lie correspondiente algrupo de Lie de todas las transformaciones lineales del espacio tangente. Pero esta álgebra de Lie es nuevamente unálgebra de 2-formas, y R(s) es precisamente este generador. El álgebra de Lie de todas las transformaciones del lazoes el álgebra de Lie de la holonomía correspondiente a la curvatura.
Simetrías del tensor de curvatura en una variedad de RiemannFijado un sistema de coordenadas en un punto de una variedad diferenciable, las identidades que satisface el tensor,pueden ser escritas en términos de las componentes sencillamente como:•• Antisimetría frente al intercambio entre los dos primeros o los dos últimos índices:
•• Simetría respecto al intercambio del bloque formado por los dos primeros índices con el bloque formado por losúltimos:
•• Primera identidad de Bianchi: la suma en tres entradas del tensor de curvatura (las tres últimas con nuestraconvención de signos) bajo permutación circular se anula
que también aparece en forma más compacta como , donde el corchete [ ] denotaantisimetrización sobre las componentes seleccionadas. Los 6 términos que aparecen se reducen a tres usandola primera de las simetrías.
•• Segunda identidad de Bianchi
,o de modo equivalente:
Aunque el tensor de curvatura tenga componentes, donde es la dimensión de la variedad donde está definido,
las tres primeras relaciones reducen el número de componentes independientes a . En dimensiones
2, 3 y 4, el número de componentes independientes será 1, 6, 20. En caso de trabajar en una variedad con unaconexión arbitraria, las identidades de Bianchi adoptan una forma que generaliza a las anteriores e involucra al tensorde torsión de la conexión.

Tensor de curvatura 70
Descomposición del tensor de curvaturaDada la complejidad del tensor de curvatura, a menudo es conveniente resumir parte de la información de este tensoren elementos más simples, como pueden ser las curvaturas seccionales, o las combinaciones de las mismas queforman el tensor de Ricci o la misma curvatura escalar.
Curvatura seccionalDel mismo modo que para hacer más tratable una función bilineal la estudiamos al aplicarla a dos vectores iguales(su forma cuadrática asociada), para estudiar un tensor de cuarto orden como el de curvatura podemos intentaraplicarlo sobre el mínimo número de vectores distintos. Por antisimetría, con solo un vector obtendríamos resultadosnulos. Debemos usar, pues, dos vectores diferentes.
Dado un plano , y una base del mismo, se demuestra que la cantidad[2]
no depende de la base escogida. Así, podemos decir que K sólo depende de y recibe el nombre de curvaturaseccional del plano . Si escogemos una base ortonormal , su cálculo puede simplificarse, de modo que:
El conocimiento de todas las curvaturas seccionales determina unívocamente al tensor de curvatura. Podemos pensaren ellas como unidades de información a la hora de analizar el tensor de curvatura.
Curvaturas escalar y de RicciSe llama tensor de Ricci al tensor de tipo (0, 2) cuyas componentes son la contracción en un índice covariante y otrocontravariante del tensor de curvatura.
Los elementos diagonales del tensor de Ricci pueden expresarse fácilmente como combinación de curvaturas
seccionales. Por ejemplo, dada una base ortonormal , (suma de las
curvaturas seccionales de los n-1 planos ortogonales que contengan a ).Además, se llama curvatura escalar, que suele designarse con las letras R o s, a la función que se obtiene porcontracción métrica de los dos índices del tensor de Ricci:
.Si calculamos la contracción usando una base ortonormal , obtendremos su desarrollo como suma decurvaturas seccionales:
En dos dimensiones, el tensor de curvatura está determinado por la curvatura escalar. En tres dimensiones, el tensorde curvatura está especificado por la curvatura de Ricci. Esto tiene que ver con el hecho de que el espacio de2-formas es tridimensional: la misma razón por la que podemos definir el producto vectorial para 3 dimensiones (elproducto vectorial es precisamente el producto cuña de dos 1-formas compuesto con la estrella de Hodge, sirepresentamos vectores con su 1-formas correspondientes).En más dimensiones, el tensor pleno de curvatura contiene más información que la curvatura de Ricci. Eso significa que, para un número de dimensiones n < 4, el tensor de curvatura queda completamente especificado si se conoce el tensor de Ricci, no ocurriendo así para n > 3. Eso tiene una importante consecuencia en la Teoría general de la relatividad puesto que el espacio-tiempo de n = 4 dimensiones, pero en donde las ecuaciones del campo gravitatorio sólo determinan el tensor de Ricci. Por tanto, las ecuaciones de Einstein para el campo gravitatorio no determinan

Tensor de curvatura 71
completamente el tensor de curvatura total: La parte de la curvatura no especificada por las ecuaciones de Einstein,coincide precisamente con el tensor de Weyl que se definie a continuación.
La curvatura de WeylPara dimensión n>3, el tensor de curvatura se puede descomponer en la parte que depende de la curvatura de Ricci, yel tensor de Weyl. Si R es el tensor (0, 4)-valente de curvatura de Riemann, entonces
donde Ric es la versión (0, 2)-valente de la curvatura de Ricci, s es la curvatura escalar y g es el tensor métrico (0,2)-valente y
es el llamado producto de Kulkarni-Nomizu de los dos (0, 2)-tensores.Las componentes del tensor de Weyl pueden ser calculadas explícitamente a partir del tensor de curvatura deRiemann, el tensor de curvatrua de Ricci y la curvatura escalar:
Donde:son las componentes del tensor de Riemann.
son las componentes del tensor de Ricci.es la curvatura escalar de Ricci.
se refiere a la parte antisimétrica de un tensor.Si g'=fg para una cierta función escalar - el cambio conforme de la métrica - entonces W'=fW. Para curvaturaconstante, el tensor de Weyl es cero. Por otra parte, W=0 si y solamente si la métrica es conforme a la métricaeuclidiana estándar (igual a fg, donde g es la métrica estándar en un cierto marco coordinado y f es una cierta funciónescalar). La curvatura es constante si y solamente si W=0 y Ric=s/n
Referencias[1][1] O Neill Semiriemaniann geometry. Academic Press, 1983. ISBN 0-12-526740-1 (tratamiento de curvatura en variedades semiriemanianas)[2] Berger, M. A panoramic view of riemannian Geometry. Springer, 2003. ISBN 3-540-65317-1
Bibliografía• Lee, J.M. Riemannian manifolds: an introduction to curvature. GTM 176. ISBN 0-387-98271-X• Spivak, Michael (1999), A Comprehensive introduction to differential geometry, Volumen 2, Publish or Perish,
ISBN 0-914098-71-3
• Portal:Matemática. Contenido relacionado con Matemática.
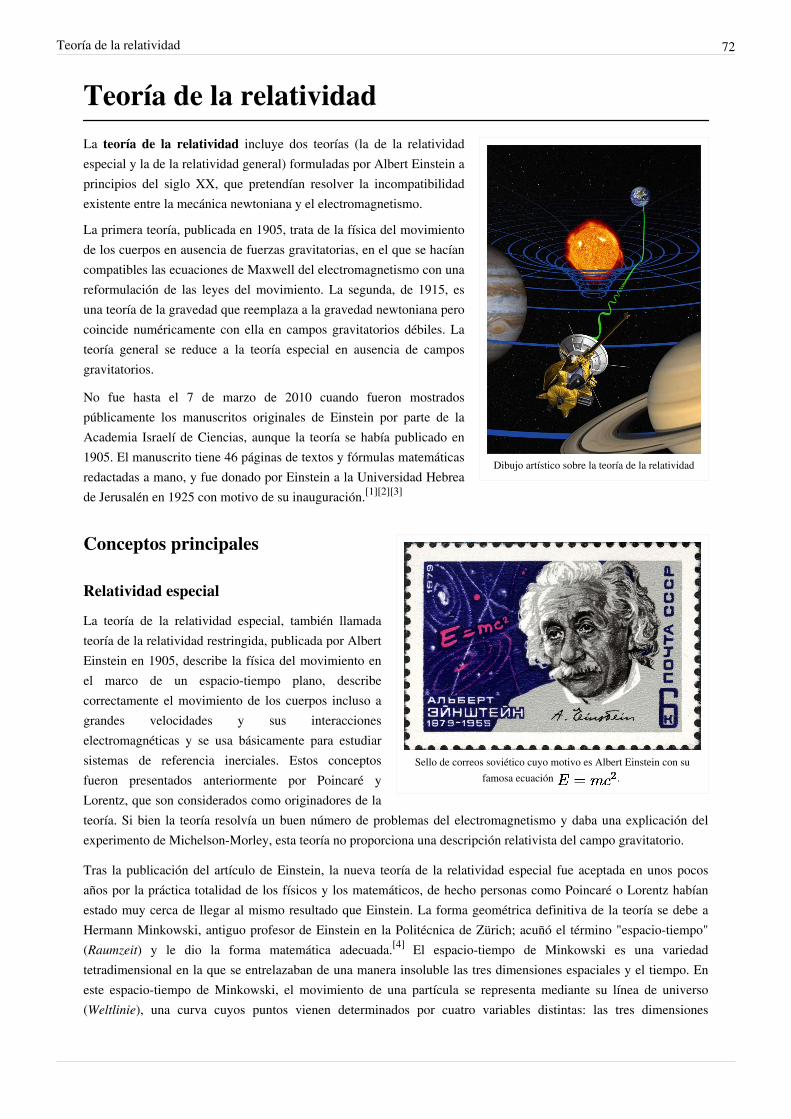
Teoría de la relatividad 72
Teoría de la relatividad
Dibujo artístico sobre la teoría de la relatividad
La teoría de la relatividad incluye dos teorías (la de la relatividadespecial y la de la relatividad general) formuladas por Albert Einstein aprincipios del siglo XX, que pretendían resolver la incompatibilidadexistente entre la mecánica newtoniana y el electromagnetismo.
La primera teoría, publicada en 1905, trata de la física del movimientode los cuerpos en ausencia de fuerzas gravitatorias, en el que se hacíancompatibles las ecuaciones de Maxwell del electromagnetismo con unareformulación de las leyes del movimiento. La segunda, de 1915, esuna teoría de la gravedad que reemplaza a la gravedad newtoniana perocoincide numéricamente con ella en campos gravitatorios débiles. Lateoría general se reduce a la teoría especial en ausencia de camposgravitatorios.
No fue hasta el 7 de marzo de 2010 cuando fueron mostradospúblicamente los manuscritos originales de Einstein por parte de laAcademia Israelí de Ciencias, aunque la teoría se había publicado en1905. El manuscrito tiene 46 páginas de textos y fórmulas matemáticasredactadas a mano, y fue donado por Einstein a la Universidad Hebreade Jerusalén en 1925 con motivo de su inauguración.[1][2][3]
Sello de correos soviético cuyo motivo es Albert Einstein con sufamosa ecuación .
Conceptos principales
Relatividad especial
La teoría de la relatividad especial, también llamadateoría de la relatividad restringida, publicada por AlbertEinstein en 1905, describe la física del movimiento enel marco de un espacio-tiempo plano, describecorrectamente el movimiento de los cuerpos incluso agrandes velocidades y sus interaccioneselectromagnéticas y se usa básicamente para estudiarsistemas de referencia inerciales. Estos conceptosfueron presentados anteriormente por Poincaré yLorentz, que son considerados como originadores de lateoría. Si bien la teoría resolvía un buen número de problemas del electromagnetismo y daba una explicación delexperimento de Michelson-Morley, esta teoría no proporciona una descripción relativista del campo gravitatorio.
Tras la publicación del artículo de Einstein, la nueva teoría de la relatividad especial fue aceptada en unos pocos años por la práctica totalidad de los físicos y los matemáticos, de hecho personas como Poincaré o Lorentz habían estado muy cerca de llegar al mismo resultado que Einstein. La forma geométrica definitiva de la teoría se debe a Hermann Minkowski, antiguo profesor de Einstein en la Politécnica de Zürich; acuñó el término "espacio-tiempo" (Raumzeit) y le dio la forma matemática adecuada.[4] El espacio-tiempo de Minkowski es una variedad tetradimensional en la que se entrelazaban de una manera insoluble las tres dimensiones espaciales y el tiempo. En este espacio-tiempo de Minkowski, el movimiento de una partícula se representa mediante su línea de universo (Weltlinie), una curva cuyos puntos vienen determinados por cuatro variables distintas: las tres dimensiones

Teoría de la relatividad 73
espaciales ( , , ) y el tiempo ( ). El nuevo esquema de Minkowski obligó a reinterpretar los conceptos de la métricaexistentes hasta entonces. El concepto tridimensional de punto fue sustituido por el de evento. La magnitud dedistancia se reemplaza por la magnitud de intervalo.
Relatividad general
Esquema de la curvatura del espacio-tiempoalrededor de una masa con simetría esférica.
La relatividad general fue publicada por Einstein en 1915, y fuepresentada como conferencia en la Academia de Ciencias Prusiana el25 de noviembre. La teoría generaliza el principio de relatividad deEinstein para un observador arbitrario. Esto implica que las ecuacionesde la teoría deben tener una forma de covariancia más general que lacovariancia de Lorentz usada en la teoría de la relatividad especial.Además de esto, la teoría de la relatividad general propone que lapropia geometría del espacio-tiempo se ve afectada por la presencia demateria, de lo cual resulta una teoría relativista del campo gravitatorio.De hecho la teoría de la relatividad general predice que elespacio-tiempo no será plano en presencia de materia y que lacurvatura del espacio-tiempo será percibida como un campo gravitatorio.
Debe notarse que el matemático alemán David Hilbert escribió e hizo públicas las ecuaciones de la covarianza antesque Einstein. Ello resultó en no pocas acusaciones de plagio contra Einstein, pero probablemente sea más, porque esuna teoría (o perspectiva) geométrica. La misma postula que la presencia de masa o energía «curva» alespacio-tiempo, y esta curvatura afecta la trayectoria de los cuerpos móviles e incluso la trayectoria de la luz.Einstein expresó el propósito de la teoría de la relatividad general para aplicar plenamente el programa de ErnstMach de la relativización de todos los efectos de inercia, incluso añadiendo la llamada constante cosmológica a susecuaciones de campo[5]para este propósito. Este punto de contacto real de la influencia de Ernst Mach fue claramenteidentificado en 1918, cuando Einstein distingue lo que él bautizó como el principio de Mach (los efectos inercialesse derivan de la interacción de los cuerpos) del principio de la relatividad general, que se interpreta ahora como elprincipio de covarianza general.[6]

Teoría de la relatividad 74
Formalismo de la teoría de la relatividadVéanse también: Espacio-tiempo, Cuadrivector y Tensor
Representación de la línea de universo de una partícula. como no esposible reproducir un espacio-tiempo de cuatro dimensiones, en la
figura se representa sólo la proyección sobre 2 dimensionesespaciales y una temporal.
Partículas
En teoría de la relatividad una partícula puntual quedarepresentada por un par , donde esuna curva diferenciable, llamada línea de universo de lapartícula, y m es un escalar que representa la masa enreposo. El vector tangente a esta curva es un vectortemporal llamado cuadrivelocidad, el producto de estevector por la masa en reposo de la partícula esprecisamente el cuadrimomento. Este cuadrimomentoes un vector de cuatro componentes, tres de estascomponentes se denominan espaciales y representan elanálogo relativista del momento lineal de la mecánicaclásica, la otra componente denominada componentetemporal representa la generalización relativista de laenergía cinética. Además dada una curva arbitraria enel espacio-tiempo puede definirse a lo largo de ella elllamado intervalo relativista, que se obtiene a partir deltensor métrico, el intervalo relativista medido a lo largode la trayectoria de una partícula es proporcional al intervalo de tiempo propio o intervalo de tiempo percibido pordicha partícula.
CamposCuando se consideran campos o distribuciones continuas de masa se necesita algún tipo de generalización para lanoción de partícula. Un campo físico posee momentum y energía distribuidos en el espacio-tiempo, el concepto decuadrimomento se generaliza mediante el llamado tensor de energía-impulso que representa la distribución en elespacio-tiempo tanto de energía como de momento lineal. A su vez un campo dependiendo de su naturaleza puederepresentarse por un escalar, un vector o un tensor. Por ejemplo el campo electromagnético se representa por untensor de segundo orden totalmente antisimétrico o 2-forma. Si se conoce la variación de un campo o unadistribución de materia, en el espacio y en el tiempo entonces existen procedimientos para construir su tensor deenergía-impulso.

Teoría de la relatividad 75
Magnitudes físicasEn relatividad, estas magnitudes físicas son representadas por vectores 4-dimensionales o bien por objetosmatemáticos llamados tensores, que generalizan los vectores, definidos sobre un espacio de cuatro dimensiones.Matemáticamente estos 4-vectores y 4-tensores son elementos definidos del espacio vectorial tangente alespacio-tiempo (y los tensores se definen y se construyen a partir del fibrado tangente o cotangente de la variedadque representa el espacio-tiempo).
Correspondencia entre E3[7] y M4[8]
Espacio tridimensional euclídeo Espacio-tiempo de Minkowski
Punto Evento
Longitud Intervalo
Velocidad Cuadrivelocidad
Momentum Cuadriamomentum
El intervalo relativistaEl intervalo relativista puede definirse en cualquier espacio-tiempo sea este plano como en la relatividad especial ocurvo como en relatividad general. Sin embargo por simplicidad discutiremos inicialmente el concepto de intervalopara el caso de un espacio-tiempo plano. El tensor métrico del espacio-tiempo plano de Minkowski se designa con laletra y en coordenadas galileanas o inerciales toma la siguiente forma:[9]
El intervalo, la distancia tetradimensional, se representa mediante la expresión se calcula del siguiente modo:
Los intervalos pueden ser clasificados en tres categorías: Intervalos espaciales (cuando es negativo),temporales (si es positivo) y nulos (cuando ). Como el lector habrá podido comprobar, los intervalosnulos son aquellos que corresponden a partículas que se mueven a la velocidad de la luz, como los fotones: Ladistancia recorrida por el fotón es igual a su velocidad (c) multiplicada por el tiempo y por lo tanto elintervalo se hace nulo.

Teoría de la relatividad 76
Reproducción de un cono de luz, en el que se representan dosdimensiones espaciales y una temporal (eje de ordenadas). El
observador se sitúa en el origen, mientras que el futuro y el pasadoabsolutos vienen representados por las partes inferior y superior deleje temporal. El plano correspondiente a t = 0 se denomina plano de
simultaneidad o hipersuperficie de presente (También llamado"Diagrama de Minkowski"). Los sucesos situados dentro de los
conos están vinculados al observador por intervalos temporales. Losque se sitúan fuera, por intervalos espaciales.
Los intervalos nulos pueden ser representados en formade cono de luz, popularizados por el celebérrimo librode Stephen Hawking, Historia del Tiempo. Sea unobservador situado en el origen, el futuro absoluto (lossucesos que serán percibidos por el individuo) sedespliega en la parte superior del eje de ordenadas, elpasado absoluto (los sucesos que ya han sidopercibidos por el individuo) en la parte inferior, y elpresente percibido por el observador en el punto 0. Lossucesos que están fuera del cono de luz no nos afectan,y por lo tanto se dice de ellos que están situados enzonas del espacio-tiempo que no tienen relación decausalidad con la nuestra.
Imaginemos, por un momento, que en la galaxiaAndrómeda, situada a 2 millones de años luz denosotros, sucedió un cataclismo cósmico hace 100.000años. Dado que 1) la luz de Andrómeda tarda 2millones de años en llegar hasta nosotros y 2) nadapuede viajar a una velocidad superior a la de losfotones, es evidente, que no tenemos manera deenterarnos de lo que sucedió en dicha Galaxia hace tansólo 100.000 años. Se dice por lo tanto que el intervaloexistente entre dicha hipotética catástrofe cósmica ynosotros, observadores del presente, es un intervalo
espacial ( ), y por lo tanto, no puede afectar a los individuos que en el presente viven en la Tierra: Esdecir, no existe relación de causalidad entre ese evento y nosotros.
AnálisisEl único problema con esta hipótesis, es que a el entrar en un agujero negro, se anula el espacio tiempo, y como yasabemos, algo que contenga algún volumen o masa, debe tener como mínimo un espacio donde ubicarse, el tiempoen ese caso, no tiene mayor importancia, pero el espacio juega un rol muy importante en la ubicación de volúmenes,por lo que esto resulta muy improbable, pero no imposible para la tecnología.
Imagen de la galaxia Andrómeda tomada por el telescopio Spitzer. ¿Pueden llegarhasta nosotros sucesos acaecidos tan sólo 100.000 años atrás? Evidentemente no.Se dice por tanto que entre tales eventos y nosotros existe un intervalo espacial.
Podemos escoger otro episodio históricotodavía más ilustrativo: El de la estrella deBelén, tal y como fue interpretada porJohannes Kepler. Este astrónomo alemánconsideraba que dicha estrella seidentificaba con una supernova que tuvolugar el año 5 a. C., cuya luz fue observadapor los astrónomos chinos contemporáneos,y que vino precedida en los años anteriorespor varias conjunciones planetarias en laconstelación de Piscis. Esa supernova probablemente estalló hace miles de años atrás, pero su luz no llegó a la tierrahasta el año 5 a. C. De ahí que el intervalo existente entre dicho evento y las observaciones de los astrónomosegipcios y megalíticos (que tuvieron lugar varios siglos antes de Cristo) sea un intervalo espacial, pues la radiación

Teoría de la relatividad 77
de la supernova nunca pudo llegarles. Por el contrario, la explosión de la supernova por un lado, y las observacionesrealizadas por los tres magos en Babilonia y por los astrónomos chinos en el año 5 a. C. por el otro, están unidasentre sí por un intervalo temporal, ya que la luz sí pudo alcanzar a dichos observadores.El tiempo propio y el intervalo se relacionan mediante la siguiente equivalencia: , es decir, el intervalo esigual al tiempo local multiplicado por la velocidad de la luz. Una de las características tanto del tiempo local comodel intervalo es su invarianza ante las transformaciones de coordenadas. Sea cual sea nuestro punto de referencia, seacual sea nuestra velocidad, el intervalo entre un determinado evento y nosotros permanece invariante.Esta invarianza se expresa a través de la llamada geometría hiperbólica: La ecuación del intervalo tiene laestructura de una hipérbola sobre cuatro dimensiones, cuyo término independiente coincide con el valor del cuadradodel intervalo ( ), que como se acaba de decir en el párrafo anterior, es constante. Las asíntotas de lahipérbola vendrían a coincidir con el cono de luz.
Cuadrivelocidad, aceleración y cuadrimomentumEn el espacio-tiempo de Minkowski, las propiedades cinemáticas de las partículas se representan fundamentalmentepor tres magnitudes: La cuadrivelocidad (o tetravelocidad) , la cuadriaceleración y el cuadrimomentum (otetramomentum).La cuadrivelocidad es un cuadrivector tangente a la línea de universo de la partícula, relacionada con la velocidadcoordenada de un cuerpo medida por un observador en reposo cualquiera, esta velocidad coordenada se define conla expresión newtoniana , donde son el tiempo coordenado y las coordenadas espacialesmedidas por el observador, para el cual la velocidad newtoniana ampliada vendría dada por . Sinembargo, esta medida newtoniana de la velocidad no resulta útil en teoría de la relatividad, porque las velocidadesnewtonianas medidas por diferentes observadores no son fácilmente relacionables por no ser magnitudes covariantes.Así en relatividad se introduce una modificación en las expresiones que dan cuenta de la velocidad, introduciendo uninvariante relativista. Este invariante es precisamente el tiempo propio de la partícula que es fácilmente relacionablecon el tiempo coordenado de diferentes observadores. Usando la relación entre tiempo propio y tiempo coordenado:
se define la cuadrivelocidad [propia] multiplicando por las de la velocidad coordenada:.
La velocidad coordenada de un cuerpo con masa depende caprichosamente del sistema de referencia que escojamos,mientras que la cuadrivelocidad propia es una magnitud que se transforma de acuerdo con el principio de covarianciay tiene un valor siempre constante equivalente al intervalo dividido entre el tiempo propio ( ), o lo que es lomismo, a la velocidad de la luz c. Para partículas sin masa, como los fotones, el procedimiento anterior no se puedeaplicar, y la cuadrivelocidad puede definirse simplemente como vector tangente a la trayectoria seguida por losmismos.La cuadriaceleración puede ser definida como la derivada temporal de la cuadrivelocidad ( ). Sumagnitud es igual a cero en los sistemas inerciales, cuyas líneas del mundo son geodésicas, rectas en elespacio-tiempo llano de Minkowski. Por el contrario, las líneas del mundo curvadas corresponden a partículas conaceleración diferente de cero, a sistemas no inerciales.Junto con los principios de invarianza del intervalo y la cuadrivelocidad, juega un papel fundamental la ley de conservación del cuadrimomentum. Es aplicable aquí la definición newtoniana del momentum ( ) como la masa (en este caso conservada, ) multiplicada por la velocidad (en este caso, la cuadrivelocidad), y por lo tanto sus componentes son los siguientes: , teniendo en cuenta que . La cantidad de momentum conservado es definida como la raíz cuadrada de la norma del vector de cuadrimomentum. El momentum conservado, al igual que el intervalo y la cuadrivelocidad propia, permanece invariante ante las transformaciones de coordenadas, aunque también aquí hay que distinguir entre los cuerpos con masa y los fotones. En los primeros, la magnitud del cuadriomentum es igual a la masa multiplicada por la velocidad de la luz (
). Por el contrario, el cuadrimomentum conservado de los fotones es igual a la magnitud de su

Teoría de la relatividad 78
momentum tridimensional ( ).Como tanto la velocidad de la luz como el cuadrimomentum son magnitudes conservadas, también lo es su producto,al que se le da el nombre de energía conservada ( ), que en los cuerpos con masa equivale a la masamultiplicada por la velocidad de la luz al cuadrado ( , la famosa fórmula de Einstein) y en los fotones
al momentum multiplicado por la velocidad de la luz ( )Componentes
Magnitud del cuadrimomentum
Magnitud en cuerpos con masa
Magnitud en fotones (masa = 0)
Energía
Energía en cuerpos con masa (cuerpos en reposo, p=0)
Energía en fotones (masa en reposo = 0)
La aparición de la Relatividad Especial puso fin a la secular disputa que mantenían en el seno de la mecánica clásicalas escuelas de los mecanicistas y los energetistas. Los primeros sostenían, siguiendo a Descartes y Huygens, que lamagnitud conservada en todo movimiento venía constituida por el momentum total del sistema, mientras que losenergetistas -que tomaban por base los estudios de Leibniz- consideraban que la magnitud conservada veníaconformada por la suma de dos cantidades: La fuerza viva, equivalente a la mitad de la masa multiplicada por lavelocidad al cuadrado ( ) a la que hoy denominaríamos "energía cinética", y la fuerza muerta, equivalente ala altura por la constante g ( ), que correspondería a la "energía potencial". Fue el físico alemán Hermann vonHelmholtz el que primero dio a la fuerzas leibnizianas la denominación genérica de energía y el que formuló la Leyde conservación de la energía, que no se restringe a la mecánica, que se extiende también a otras disciplinas físicascomo la termodinámica.La mecánica newtoniana dio la razón a ambos postulados, afirmando que tanto el momentum como la energía sonmagnitudes conservadas en todo movimiento sometido a fuerzas conservativas. Sin embargo, la Relatividad Especialdio un paso más allá, por cuanto a partir de los trabajos de Einstein y Minkowski el momentum y la energía dejaronde ser considerados como entidades independientes y se les pasó a considerar como dos aspectos, dos facetas de unaúnica magnitud conservada: el cuadrimomentum.
Componentes y magnitud de los diferentes conceptos cinemáticos
Concepto Componentes Expresión algebraica Partículas con masa Fotones
Intervalo
Cuadrivelocidad Cuadrivelocidadno definida
Aceleración(sistemas inerciales)
(sistemas no inerciales)
Aceleraciónno definida

Teoría de la relatividad 79
Cuadrimomentum
El tensor de energía-impulso (Tab)
Tensor de tensión-energía
Tres son las ecuaciones fundamentales queen física newtoniana describen el fenómenode la gravitación universal: la primera,afirma que la fuerza gravitatoria entre doscuerpos es proporcional al producto de susmasas e inversamente proporcional alcuadrado de su distancia (1); la segunda, queel potencial gravitatorio ( ) en undeterminado punto es igual a la masamultiplicada por la constante G y divididapor la distancia r (2); y la tercera, finalmente,es la llamada ecuación de Poisson (3), queindica que el laplaciano[10] del potencialgravitatorio es igual a , donde esla densidad de masa en una determinadaregión esférica.
Sin embargo, estas ecuaciones no son compatibles con la Relatividad Especial por dos razones:• En primer lugar la masa no es una magnitud absoluta, sino que su medición deriva en resultados diferentes
dependiendo de la velocidad relativa del observador. De ahí que la densidad de masa no puede servir deparámetro de interacción gravitatoria entre dos cuerpos.
• En segundo lugar, si el concepto de espacio es relativo, también lo es la noción de densidad. Es evidente que lacontracción del espacio producida por el incremento de la velocidad de un observador, impide la existencia dedensidades que permanezcan invariables ante las transformaciones de Lorentz.
Por todo ello, resulta necesario prescindir del término , situado en el lado derecho de la fórmula de Poissony sustituirlo por un objeto geométrico-matemático que permanezca invariante ante las transformaciones deLorentz: Dicho objeto fue definido por Einstein en sus ecuaciones de universo y recibe el nombre de tensor deenergía-momentum ( ). Sus coeficientes describen la cantidad de tetramomentum que atraviesa unahipersuperficie , normal al vector unitario .De este modo, el tensor de energía momentum puede expresarse mediante la siguiente ecuación:
O lo que es lo mismo: El componente del tetramomentum es igual a la integral de hipersuperficie deltensor de tensión-energía.En un fluido ideal, del que están ausentes tanto la viscosidad como la conducción de calor, los componentes deltetramomentum se calculan de la siguiente forma:
,

Teoría de la relatividad 80
donde es la densidad de masa-energía (masa por unidad de volumen tridimensional), es la presiónhidrostática, es la cuadrivelocidad del fluido, y es la matriz inversa del tensor métrico de la variedad.Además, si los componentes del tensor se miden por un observador en reposo relativo respecto al fluido, entonces, eltensor métrico viene constituido simplemente por la métrica de Minkowski:
Puesto que además la tetravelocidad del fluido respecto al observador en reposo es:
.como consecuencia de ello, los coeficientes del tensor de tensión-energía son los siguientes:
Parte de la materia que cae en el disco de acreción de un agujeronegro es expulsada a gran velocidad en forma de chorros. En
supuestos como éste, los efectos gravitomagnéticos pueden llegar aalcanzar cierta importancia.
Donde es la densidad de masa, y son loscomponentes tridimensionales de la presiónhidrostática. Como vemos, el campo gravitatorio tienedos fuentes diferentes: La masa y el momentum delfluido en cuestión. Los efectos gravitatorios originadospor la masa se denominan efectos gravitoeléctricos,mientras que aquellos que se deben al momentumreciben el nombre de efectos gravitomagnéticos. Losprimeros tienen una intensidad superior a lossegundos, que sólo se manifiestan en aquellos casos enlos que las partículas del fluido se mueven con unavelocidad cercana a la de la luz (se habla entonces defluidos relativistas): Es el caso de los chorros (jets) queemanan del centro de la galaxia y que se propulsan enlas dos direcciones marcadas por el eje de rotación deeste cuerpo cósmico; de la materia que se precipitahacia un agujero negro; y del fluido estelar que sedirige hacia el centro de la estrella cuando se ésta entra en colapso. En este último caso, durante las fases finales delproceso de contracción de la estrella, la presión hidrostática puede llegar a ser tan fuerte como para llegar a acelerarel colapso, en lugar de ralentizarlo.
Podemos, a partir del tensor de tensión-energía, calcular cuánta masa contiene un determinado volumen del fluido:Retomando la definición de este tensor expuesta unas líneas más arriba, se puede definir al coeficiente como lacantidad de momentum (esto es, la masa) que atraviesa la hipersuperficie . En el espacio-tiempo deMinkowski, la hipersuperficie es aquella región que se define por las tres bases vectoriales normales al vector
: es, por tanto, un volumen tridimensional, definido por los vectores base (eje x), (eje y), y (eje z). Podemos por tanto escribir:

Teoría de la relatividad 81
Del mismo modo, es posible deducir matemáticamente a partir del tensor de tensión-energía la definiciónnewtoniana de presión, introduciendo en la mentada ecuación cualquier par de índices que sean diferentes de cero:
La hipersuperficie es aquella región del espacio-tiempo definida por los tres vectores unitarios normales a (se trata de los dos vectores espaciales, y , correspondientes a los ejes y y z; y del vector temporal —o , como se prefiera—). Esta definición nos permite descomponer la integral de hipersuperficie en una integraltemporal (cuyo integrando viene definido por ) y otra de superficie (esta vez bidimensional, ):
Finalmente, derivamos parcialmente ambos miembros de la ecuación respecto al tiempo, y teniendo en cuenta que lafuerza no es más que la tasa de incremento temporal del momentum obtenemos el resultado siguiente:
Que contiene la definición newtoniana de la presión como fuerza ejercida por unidad de superficie.
El tensor electromagnético (Fab)Las ecuaciones deducidas por el físico escocés James Clerk Maxwell demostraron que electricidad y magnetismo noson más que dos manifestaciones de un mismo fenómeno físico: el campo electromagnético. Ahora bien, paradescribir las propiedades de este campo los físicos de finales del siglo XIX debían utilizar dos vectores diferentes,los correspondientes los campos eléctrico y magnético.Fue la llegada de la Relatividad Especial la que permitió describir las propiedades del electromagnetismo con un sóloobjeto geométrico, el vector cuadripotencial, cuyo componente temporal se correspondía con el potencial eléctrico,mientras que sus componentes espaciales eran los mismos que los del potencial magnético.
De este modo, el campo eléctrico puede ser entendido como la suma del gradiente del potencial eléctrico más laderivada temporal del potencial magnético:
y el campo magnético, como el rotacional del potencial magnético:
Las propiedades del campo electromagnético pueden también expresarse utilizando un tensor de segundo ordendenominado tensor de Faraday y que se obtiene diferenciando exteriormente al vector cuadripotencial
La fuerza de Lorentz puede deducirse a partir de la siguiente expresión:
Donde q es la carga y la cuadrivelocidad de la partícula.
Teoría de la relatividad 82
Referencias[1] Diario El Universal (Venezuela). « Exponen en Israel manuscrito de la teoría de la relatividad de Einstein (http:/ / www. eluniversal. com/
2010/ 03/ 07/ cul_ava_exponen-en-israel-ma_07A3543215. shtml)» (en español). Diario El Universal. Consultado el 07 de marzo de 2010.[2] Agencia EFE. « El manuscrito de la teoría de la relatividad expuesto por primera vez (http:/ / www. google. com/ hostednews/ epa/ article/
ALeqM5jFb5iKXDcWvGb1W7jgQ4iYaoDJGg)» (en español). Agencia EFE, alojado por Google. Consultado el 07 de marzo de 2010.[3] Gavin Rabinowitz. « Einstein's theory of relativity on display for first time (http:/ / www. google. com/ hostednews/ afp/ article/
ALeqM5gA8xgEZPec9SPYpIY-jRE3Wigd0g)» (en inglés). Agencia AFP, alojado por Google. Consultado el 07 de marzo de 2010.[4][4] El espacio euclídeo es una variedad tridimensional. El espacio-tiempo de Minkowski es una variedad de cuatro dimensiones, de las cuales tres
son espaciales y una temporal.[5] # Einstein, Albert (1.917). Kosmologische Betrachtungen zur allgemeinen Relativitätstheorie. Sitzungsberichte der Preuss. Akad. Berlin.
pp. 142-157.[6] Stanford Encyclopedia of Philosophy. Early Philosophical Interpretations of General Relativity. 2.Machian Positivism. 2.2. A “Relativization
of Inertia”? (http:/ / plato. stanford. edu/ entries/ genrel-early/ ) Consultado: 04/06/2.012[7][7] Es decir, el espacio euclídeo. La letra E corresponde a la inicial del matemático Euclides, y el número 3 al número de dimensiones espaciales.[8][8] M4 es el espacio-tiempo de Minkowski. M es la inicial de Minokwski y 4 es el número de dimensiones de las que se compone la variedad.[9] Conviene señalar que existen dos convenciones, la más usada en teoría cuántica relativista usa y el resto de componentes negativas,
mientras que en cosmología y relatividad se usa más comúnmente y el resto de componentes positivas. Ambas convenciones sonbásicamente equivalentes.
[10][10] laplaciano: Divergencia de un gradiente.
Bibliografía• Girbau, J.: "Geometria diferencial i relativitat", Ed. Universitat Autònoma de Barcelona, 1993. ISBN
84-7929-776-X.
Enlaces externos• Wikiquote alberga frases célebres de o sobre Teoría de la relatividad. Wikiquote
• Wikimedia Commons alberga contenido multimedia sobre Teoría de la relatividad. Commons• La Relatividad sin fórmulas, en eltamiz.com (http:/ / eltamiz. com/ relatividad-sin-formulas/ ) (13-05-09)• Surveying the shunting line of a ray of light of the space (http:/ / www. homenews. com. br/ mod.
php?mod=forum& op=threadview& topicid=78& forumid=6) trd. (en portugués)

Álgebra multilineal 83
Álgebra multilinealEn la matemática, el álgebra multilineal es una área de estudio que generaliza los métodos del álgebra lineal. Losobjetos de estudio son los productos tensoriales de espacios vectoriales y las transformaciones multi-lineales entrelos espacios.
NotaciónEl álgebra multilineal hace un uso intensivo de la notación multi-índice. Una notación de ese tipo hace representarlas combinaciones lineales por un conjunto de dos o más índices repetidos.• En el caso elemental (tensores de rango uno contravariantes) tenemos, usando la convención de la suma de
Einstein: . Lo cual indica que el objeto X, es la combinación lineal:
sobre los vectores básicos , y los llamados los componentes de X. Aquí es la dimensión (algebraica)de espacio donde "vive" X. Por convención se llama a estos 1-contra-tensores.
• En rango uno también están los 1-co tensores, es decir mapeos lineales desde el espacio elegido hacia el campode los escalares. Ellos se escriben como combinación lineal de los funcionales lineales , transformacioneslineales que satisfacen: , donde (como clásicamente) se está usando la delta de Kronecker. Asícualquier covector se escribe como , notación que abrevia .
• Tensores de rango dos:• Un tensor de rango dos contravariante es .• Un tensor de rango dos covariante es .• Y un tensor de rango dos mixto es . Esto inidica una combinación lineal bi-indexada.
Por ejemplo,
si la dimensión del espacio es dos.
• Generalizando lo anterior se escribe para representar los componentes de un tensor mixto A, quees p-contravariante y q-covariante. Pero
representa una combinación lineal multi-indexada.Todo lo anterior sólo ha sido considerando que el espacio vectorial es de dinensión finita igual a n.
Producto tensorialTeniendo dos espacios vectoriales V, W, con respectivas bases , se define su productotensorial
es decir el espacio vectorial generado por los nuevos símbolos
Y por lo tanto si un objeto X que vive en (pertenece a) entonces el se puede representar como unacombinación lineal
y la cual se va a abreviar como

Álgebra multilineal 84
los índices repetidos s o t, una vez arriba y una vez abajo -está convenido- indica sumación, cada uno.Esta definición es absolutamente abstracta, pero desde el punto de vista algebraico no hay ningún problema explorartodas la posibilidades del producto tensorial. Una plétora de espacios surge (y de importancia capital) simplemente alconsiderar un espacio vectorial V y su dual uno obtiene los espacios:
Todos ellos de uso cotidiano em la geometría diferencial, geometría algebraica, álgebra conmutativa, relatividad ycuántica, teorías de campo, QFT, TQFT y otras.
Tensores y formasSea generado por los . Simbolicemos con la base de dual . Cualquier elemento de se escribede la forma . Esta misma expresión puede ser vista como un mapa bilineal
sabiendo que - kronecker.Otro de rango dos es . Los elementos de aquí se ven como combinaciones lineales bi-indexadas .
Algunos conceptos desarrollados (lista incompleta)•• tensor•• espacio dual•• covector•• geometría diferencial•• cálculo tensorial•• análisis vectorial•• covarianza y contravarianza•• tensor métrico•• derivada covariante•• conexión•• tensor de curvatura de Riemann•• símbolos de Christoffel•• álgebra exterior•• forma diferencial•• curvatura•• teorema de Stokes•• Símbolo de Levi-Civita•• Sección (matemática)•• Campo vectorial•• Campo tensorial•• Pullback

Álgebra multilineal 85
Referencia
Bibliografía• Robert M. Wald, General Relativity, Chicago University Press, ISBN 0-226-87033-2.
Análisis funcionalEl análisis funcional es la rama de las matemáticas, y específicamente del análisis, que trata del estudio de espaciosde funciones. Tienen sus raíces históricas en el estudio de transformaciones tales como transformación de Fourier yen el estudio de las ecuaciones diferenciales y ecuaciones integrales. La palabra funcional se remonta al cálculo devariaciones, implicando una función cuyo argumento es una función. Su uso en general se ha atribuido a Volterra.En la visión moderna inicial, se consideró el análisis funcional como el estudio de los espacios vectoriales normadoscompletos sobre los reales o los complejos. Tales espacios se llaman Espacios de Banach. Un ejemplo importante esel espacio de Hilbert, donde la norma surge de un producto escalar. Estos espacios son de importancia fundamentalen la formulación matemática de la mecánica cuántica. Más general y modernamente, el análisis funcional incluye elestudio de los espacios de Fréchet y otros espacios vectoriales localmente convexos y aún topológicos.Un objeto importante de estudio en análisis funcional son los operadores lineales continuos definidos en los espaciosde Banach y de Hilbert. Éstos conducen naturalmente a la definición de C* álgebra y otras álgebras de operadores.Los espacios de Hilbert pueden ser clasificados totalmente: hay un espacio único de Hilbert módulo isomorfismopara cada cardinal de la base (hilbertiana). Puesto que los espacios de Hilbert finito-dimensionales se entiendencompletamente en álgebra lineal, y puesto que los morfismos de los espacios de Hilbert se pueden dividir siempre enmorfismos de espacios con dimensionalidad alef-0 ( ), análisis funcional de Hilbert trata sobre todo con elespacio único de Hilbert de dimensionalidad alef-0, y sus morfismos.Los espacios de Banach generales son mucho más complicados que los espacios de Hilbert. Dado que un espacio deBanach es un espacio vectorial, una base es un sistema de generadores linealmente independiente. Este concepto,cuando la dimensión no es finita, suele carecer de utilidad; lo sustituye el de conjunto fundamental. Un conjunto devectores es fundamental si la clausura topológica del subespacio vectorial que engendra es el espacio completo.Dado que un vector pertenece a su clausura topológica si es el límite de una sucesión de vectores del subespaciovectorial engendrado, descubrimos que, en caso de disponer de un conjunto fundamental, podemos poner todo vectordel espacio como el límite de una sucesión de combinaciones lineales de los vectores de un conjunto fundamental.Un ejemplo de lo anterior es el Teorema de aproximación de Weierstrass que afirma que toda función real continuaen un intervalo compacto puede ser aproximada mediante polinomios. El espacio de Banach es, en este caso, elconjunto de las funciones continuas en un compacto y el conjunto fundamental las potencias enteras del argumento.Este teorema se extiende mediante el teorema de Stone-Weierstrass.Para cualquier número real p ≥ 1, un ejemplo de un espacio de Banach viene dado por los espacios Lp.En los espacios de Banach, una gran parte del estudio involucra al espacio dual: el espacio de todas funcionaleslineales continuas. Como en álgebra lineal, el dual del dual no es siempre isomorfo al espacio original, pero hay unmonomorfismo natural de un espacio en su doble dual siempre. Esto se explica en el artículo espacio dual.La noción de derivada se amplía a las funciones arbitrarias entre los espacios de Banach; resulta que la derivada deuna función en cierto punto es realmente una función lineal continua.Un ejemplo de espacio de Banach es el Espacio de Sóbolev.Aquí enumeramos algunos resultados importantes del análisis funcional:• Teorema de Banach-Steinhaus es un resultado en conjuntos equicontinuos de operadores.

Análisis funcional 86
• Teorema espectral da una fórmula integral para los operadores normales en un espacio de Hilbert. Es deimportancia central en la formulación matemática de la mecánica cuántica.
• Teorema de Hahn-Banach es sobre la extensión de funcionales continuos desde un subespacio a todo el espacio,de una manera que preserve la norma.
• Teorema de la función abierta y teorema de la gráfica cerrada.•• Teorema del punto fijo de Banach
Referencias•• Yosida, K.: Functional Analysis, Springer-Verlag, 6th edition, 1980•• Schechter, M.: Principles of Functional Analysis, AMS, 2nd edition, 2001•• Hutson, V., Pym, J.S., Cloud M.J.: Applications of Functional Analysis and Operator Theory, 2nd edition,
Elsevier Science, 2005, ISBN 0-444-51790-1•• Dunford, N. and Schwartz, J.T. : Linear Operators, General Theory, and other 3 volumes, includes visualization
charts•• Brezis, H.: Analyse Fonctionnelle, Dunod•• Sobolev, S.L.: Applications of Functional Analysis in Mathematical Physics, AMS, 1963•• Lebedev, L.P. and Vorovich, I.I.: Functional Anlysis in Mechanics, Springer-Verlag, 2002
Sistema formalUn sistema formal es una gramática formal usada para la modelización. Se usa en las ciencias formales de la lógicay las matemáticas, así como en otras disciplinas relacionadas como son la informática, la teoría de la información, yla estadística, para proporcionar una definición rigurosa del concepto de demostración La noción de sistema formalcorresponde a una formalización rigurosa y completa del concepto de sistema axiomático. Llamamos formalizaciónal acto de crear un sistema formal, con la que pretendemos capturar y abstraer la esencia de determinadascaracterísticas del mundo real, en un modelo conceptual expresado en un determinado lenguaje formal.En matemáticas, las pruebas formales son el resultado de sistemas formales, consistentes en axiomas y reglas dededucción. Los teoremas pueden ser obtenidos por medio de pruebas formales. Este punto de vista de lasmatemáticas ha sido denominado formalista; aunque en muchas ocasiones este término conlleva una acepciónpeyorativa. En ese sentido David Hilbert creó la disciplina denominada metamatemática dedicada al estudio de lossistemas formales, entendiendo que el lenguaje utilizado para ello, denominado metalenguaje era distinto dellenguaje del sistema formal que se pretendía estudiar. Con otra denominación, el metalenguaje o lenguaje obtenidomediante la gramática formal se llama también, en ocasiones, lenguaje objeto.Un sistema así es la reducción de un lenguaje formalizado a meros símbolos, lenguaje formalizado y simbolizado sincontenido material alguno; un lenguaje reducido a mera forma que se expresa mediante fórmulas que reflejan lasrelaciones sintácticas entre los símbolos y las reglas de formación y transformación que permiten construir lasfórmulas del sistema y pasar de una fórmula a otra.[1]
El objetivo de un sistema formal es señalar como válidas determinadas cadenas. Estas cadenas válidas se denominanteoremas. Para obtener los teoremas se emplean las reglas de producción que convierten una cadena en otra. Hayciertos teoremas iniciales que no se obtienen de ninguna regla, éstos son los axiomas que se suponen válidos pordefinición y se convierten en el germen de producción de teoremas.

Sistema formal 87
Problema de la decisiónEl problema de la decisión consiste en saber si una cadena cualquiera es un teorema. El algoritmo que proporcionauna respuesta a la pregunta de si la cadena es o no un teorema se denomina procedimiento de decisión. En alemán,Entscheidungsproblem.
Propiedades de los sistemas formales•• Coherencia: El sistema formal es coherente si cada teorema al ser interpretado no corresponde a una decisión
verdadera.•• Completitud: El sistema formal es completo si cada proposición verdadera puede ser representada mediante un
teorema. Es incompleto si alguna verdad no puede expresarse.•• Decidibilidad: Un sistema formal es decidible si existe un algoritmo que diga en tiempo finito si una cadena
cualquiera es un teorema o no lo es.
La matemática como sistema formalLa matemática fue considerada por David Hilbert un sistema formal ya que toda la matemática puede serinterpretada a base de símbolos, axiomas y reglas de producción. Pero en 1931 Kurt Gödel demostró que lacoherencia y la completitud no podían ser ciertos a la vez en las matemáticas, o al menos en los números enteros. Eslo que se denomína el teorema de la incompletitud de Gödel. Por otra parte Alonzo Church demostró que lamatemática tampoco podía ser decidible, con lo que la idea de las matemáticas como sistema formal tal y comoHilbert pretendía resulto demolida.
El sistema axiomático de PeanoEl sistema de Peano es un sistema de postulados a partir del cual puede deducirse toda la aritmética de los númerosnaturales. Los primitivos de este sistema son los términos "0" (cero), "número" y "sucesor", de los cuales, por serprimitivos no se da definición alguna. Sin embargo, se entiende por "0" dicho número, el término "número" designaa los números naturales 0, 1, 2, 3,... exclusivamente, y con "sucesor" de un número natural n se refiere al númeronatural inmediato siguiente de n en el orden natural. El Sistema de Peano contiene los 5 postulados que siguen:•• P1 0 es un número.•• P2 El sucesor de un número es siempre un número.•• P3 Dos números nunca tienen el mismo sucesor.•• P4 0 no es el sucesor de número alguno.• P5 Si P es una propiedad tal que (a) cero tiene la propiedad P, y (b) siempre que un número n tenga la propiedad
P el sucesor de n también tendrá la propiedad P, entonces todos los números tendrán la propiedad P.El último postulado entraña el principio de inducción matemática e ilustra claramente el alcance de una "verdad"matemática por convención. Se construye la aritmética fundamental sobre esta base, definiendo los diversos númerosnaturales como el sucesor de cero ( 0‘ ), el sucesor del sucesor de cero( 0‘‘ ), y así hasta el infinito.Luego, se establece la definición de suma, que expresa que la adición de un número natural a otro dado puedeconsiderérsela como la suma repetida de 1; esta última operación es fácilmente expresable por medio de la relaciónde sucesor:(a) n + 0 = n; (b) n + k' = (n + k)'Pasando ahora a la multiplicación de los números naturales, se la puede definir por medio de la siguiente definiciónpor recurrencia, que expresa de manera rigurosa que el producto nk de dos números naturales puede ser consideradocomo la suma de k términos cada uno de los cuales es igual a n, en otros términos:(a) n . 0 = 0; (b) n. k' = n. k + n

Sistema formal 88
Referencias[1] Encyclopædia Britannica, Formal system (http:/ / www. britannica. com/ eb/ article-9034889/ formal-system) definition, 2007.
Bibliografía• Raymond M. Smullyan, 1961. Theory of Formal Systems: Annals of Mathematics Studies, Princeton University
Press (April 1, 1961) 156 pages ISBN 069108047X• S. C. Kleene, 1967. Mathematical Logic Reprinted by Dover, 2002. ISBN 0486425339• Douglas Hofstadter, 1979,. Gödel, Escher, Bach: An Eternal Golden Braid ISBN 978-0465026562. 777 pages.
Enlaces externos• Wikcionario tiene definiciones para formalización.Wikcionario• Formal system (http:/ / www. britannica. com/ eb/ article-9034889/ formal-system), definición en la Enciclopedia
Británica, 2007.• Christer Blomqvist, an introduction to formal systems (http:/ / hemsidor. torget. se/ users/ m/ mauritz/ math/ logic/
inform. htm), página web 1997.• What is a Formal System? (http:/ / www. cs. indiana. edu/ ~port/ teach/ 641/ formal. sys. haug. html): Algunas
citas de `Artificial Intelligence: The Very Idea' (1985) de John Haugeland, pp. 48–64.• Heinrich Herre Formal Language and systems (http:/ / www-ls. informatik. uni-tuebingen. de/ psh/ forschung/
publikationen/ RoutledgeFLS1995. pdf), 1997.• Peter Suber, Formal Systems and Machines: An Isomorphism (http:/ / www. earlham. edu/ ~peters/ courses/
logsys/ machines. htm), 1997.
Geometría euclídeaLa geometría euclídea (o geometría parabólica)[1] es el estudio de las propiedades geométricas de los espacioseuclídeos. Es aquella que estudia las propiedades geométricas del plano afín euclídeo real y del espacio afín euclídeotridimensional real mediante el método sintético, introduciendo los cinco postulados de Euclides.También es común (abusando del lenguaje) decir que una geometría es euclídea si no es no euclídea, es decir, si endicha geometría se verifica el quinto postulado de Euclides. Ésta denominación está cada vez más en desuso, debidoa la pérdida de interés que va teniendo el tema de la posibilidad de trazar paralelas a una recta desde un puntoexterior a la misma.En ocasiones los matemáticos usan el término para englobar geometrías de dimensiones superiores con propiedadessimilares. Sin embargo, con frecuencia, geometría euclídea es sinónimo de geometría plana y de geometría clásica.
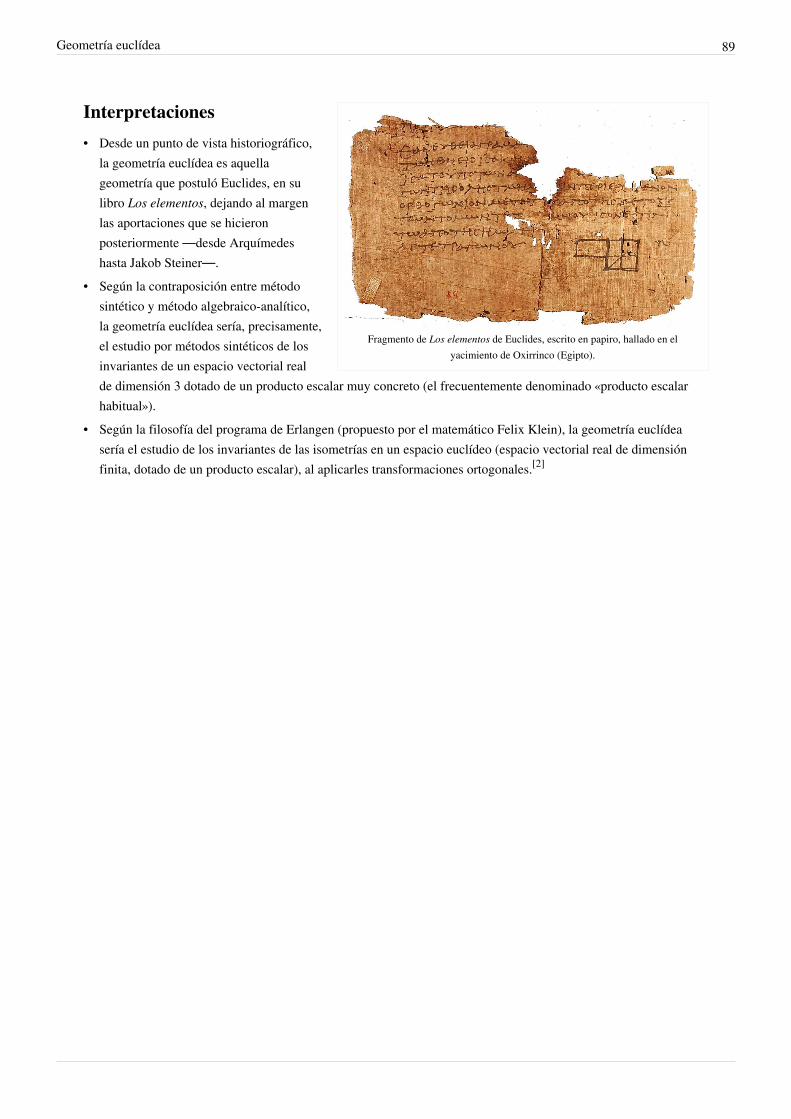
Geometría euclídea 89
Fragmento de Los elementos de Euclides, escrito en papiro, hallado en elyacimiento de Oxirrinco (Egipto).
Interpretaciones
• Desde un punto de vista historiográfico,la geometría euclídea es aquellageometría que postuló Euclides, en sulibro Los elementos, dejando al margenlas aportaciones que se hicieronposteriormente —desde Arquímedeshasta Jakob Steiner—.
• Según la contraposición entre métodosintético y método algebraico-analítico,la geometría euclídea sería, precisamente,el estudio por métodos sintéticos de losinvariantes de un espacio vectorial realde dimensión 3 dotado de un producto escalar muy concreto (el frecuentemente denominado «producto escalarhabitual»).
• Según la filosofía del programa de Erlangen (propuesto por el matemático Felix Klein), la geometría euclídeasería el estudio de los invariantes de las isometrías en un espacio euclídeo (espacio vectorial real de dimensiónfinita, dotado de un producto escalar), al aplicarles transformaciones ortogonales.[2]

Geometría euclídea 90
Geometría planaLa geometría plana es una parte de la geometría que trata de aquellos elementos cuyos puntos están contenidos enun plano. La geometría plana está considerada parte de la geometría euclídea, pues ésta estudia los elementosgeométricos a partir de dos dimensiones.
Axiomas
Portada de Los elementos de Euclides, publicada en1570 por Sir Henry Billingsley.
La presentación tradicional de la geometría euclidiana se hace enun formato axiomático. Un sistema axiomático es aquél que, apartir de un cierto número de proposiciones que se presuponen«evidentes» (conocidas como axiomas) y mediante deduccioneslógicas, genera nuevas proposiciones cuyo valor de verdad estambién lógico.
Postulados
Euclides planteó cinco postulados en su sistema:1. Dados dos puntos se puede trazar una y solo una recta que los
une.2. Cualquier segmento puede prolongarse de manera continua en
cualquier sentido.3. Se puede trazar una circunferencia con centro en cualquier
punto y de cualquier radio.4. Todos los ángulos rectos son congruentes.5. Si una recta, al cortar a otras dos, forma ángulos internos
menores a dos ángulos rectos, esas dos rectas prolongadasindefinidamente se cortan del lado en el que están los ángulosmenores que dos rectos (ver quinto postulado de Euclides).
Este último postulado, que es conocido como el postulado de las paralelas, fue reformulado como:5. Por un punto exterior a una recta, se puede trazar una única paralela a la recta dada.
Este postulado parece menos obvio que los otros cuatro, y muchos geómetras, incluido el propio Euclides, hanintentado deducirlo de los anteriores. Cuando intentaron reducirlo al absurdo negándolo, surgieron dos nuevasgeometrías: la elíptica, también llamada geometría de Riemann o riemanniana (dada una recta y un punto exterior aella, no existe ninguna recta que pase por el punto y sea paralela a la recta dada) y la hiperbólica o de Lobachevsky(existen varias rectas paralelas que pasen por un punto exterior a una dada).

Geometría euclídea 91
LimitacionesEuclides asumió que todos sus postulados o axiomas eran autoevidentes y por tanto hechos que no requeríandemostración. Sin embargo, resultó que el quinto postulado —si bien es compatible con los otro cuatro— en ciertomodo es independiente. Es decir, tanto el quinto postulado como la negación del quinto postulado, son compatiblescon los otros cuatro postulados. Las geometrías donde el quinto postulado no es válido se llaman geometríasno euclidianas.Una limitación del trabajo de Euclides fue no reconocer la posibilidad de sistemas geométricos perfectamenteconsistentes donde el quinto axioma no era válido, es decir, para Euclides y los geómetras posteriores hasta elsiglo XVIII pasó inadvertida la posibilidad de geometrías no euclidianas, hasta el trabajo de Nikolái Lobachevski,Gauss y Riemann.Si bien durante el siglo XIX se consideró a las geometrías no euclidianas un artefacto matemáticamente interesante eincluso con cierto interés práctico pero limitado, como es el caso de la trigonometría esférica usada en astronomía,en cierto modo se admitió que la geometría del espacio físico era euclidiana y, por tanto, las geometríasno euclidianas eran tan sólo un artificio abstracto útil para ciertos problemas, pero en modo alguno descripcionesrealistas del mundo. Sin embargo, el trabajo de Albert Einstein hizo ver que entre las necesidades de la físicamoderna están las geometrías no euclidianas para describir, por ejemplo, el espacio-tiempo curvo.Alguno de los errores de Euclides fue omitir al menos dos postulados más:•• Dos circunferencias cuyos centros estén separados por una distancia menor a la suma de sus radios, se cortan en
dos puntos (Euclides lo utiliza en su primera construcción).•• Dos triángulos con dos lados iguales y los ángulos comprendidos también iguales, son congruentes (afirmación
equivalente al concepto de movimiento, que Euclides usa para su teorema cuarto sin definir explícitamente).
Euclidiano y euclídeoLa Real Academia Española no recoge el adjetivo «euclídeo»,[3] aunque es un término de uso común que convivecon el adjetivo «euclidiano».[4]
Notas y referencias[1] Siguiendo la analogía de las cónicas, una parábola es el caso límite entre una elipse y una hipérbola; en el mismo sentido que la geometría
parabólica o euclídea es el caso límite entre la geometría elíptica y la geometría hiperbólica[2][2] Hay que indicar que se puede dotar a un mismo espacio vectorial real de distintos productos escalares, así que, incluso con esta acepción,
existe una enorme ambigüedad, al no quedar claro ni la dimensión del espacio (en principio cualquier dimensión finita) ni el producto aescalar al que nos referimos. Este término puede permitir que cosas que no se parecen en nada a lo que entendemos por geometría euclidianapueda llamarse precisamente geometría euclidiana.
[3] Véase el aviso acerca del neologismo euclídeo (http:/ / www. rae. es/ euclídeo) en el Diccionario de la lengua española de la Real AcademiaEspañola).
[4] Véase el artículo euclidiano (http:/ / www. rae. es/ euclidiano) en el Diccionario de la lengua española.
Enlaces externos• Geometría euclídea (http:/ / wmatem. eis. uva. es/ ~matpag/ CONTENIDOS/ Geometria/ marco_geometria. htm)• Geometría euclídea (http:/ / sauce. pntic. mec. es/ ~agarci28/ geometria_euclidea_en_el_espacio. pdf)

Geometría elíptica 92
Geometría elíptica
La superficie de la esfera constituye un ejemplo de geometría elíptica bidimensional.Sobre una esfera, la suma de los ángulos de un triángulo esférico no es igual a 180º. La
superficie de una esfera no es un espacio euclídeo, aunque localmente ambas geometríasse parecen mucho, para grandes distancias es detectable la curvatura de la esfera. Esto se
refleja en que triángulos pequeños sobre la superficie dela esfera suman casi 90º,triángulos de mayor tamaño clarametne suman más de 180º.
La geometría elíptica (llamada aveces riemanniana) es un modelo degeometría no euclideana de curvaturaconstante que satisface sólo los cuatroprimeros postulados de Euclides perono el quinto. Aunque es similar enmuchos aspectos y muchos de losteoremas de la geometría euclidianasiguen siendo válidos en geometríaelíptica, no se satisface el quintopostulado de Euclides sobre lasparalelas. Al igual que la geometríaeuclideana y la geometría hiperbólicaes un modelo de geometría decurvatura constante, siendo ladiferencia entre estos tres modelos elvalor de la curvatura:
• La geometría euclideana satisfacelos cinco postulados de Euclides ytiene curvatura cero.
• La geometría hiperbólica satisfacesólo los cuatro primeros postuladosde Euclides y tiene curvatura negativa.
•• La geometría elíptica satisface sólo los cuatro primeros postulados de Euclides y tiene curvatura positiva.
Historia
Una vez aceptado como igualmente natural el modelo de geometría hiperbólica en que se rechazaba el quintopostulado de Euclides sobre las rectas paralelas, los matemáticos buscaron nuevos sistemas geométricos queincumplieran el quinto postulado. Uno de esos modelos lo constituye la superficie de una esfera, consideradabidimensional.
En la geometría hiperbólica, dado un punto exterior a una recta siempre es posible obtener más de una "rectaparalela" a la primera que pase por dicho punto. En la geometría elíptica, dada una "recta" –de esta geometría– y unpunto exterior a la misma, no existe ninguna "recta paralela" que no interseque a la primera. De hecho, en el modeloconvencional de geometría elíptica estas "rectas" corresponden localmente a "segmentos" de mínima longitud y decurvatura mínima, siendo arcos de círculo máximo de la esfera que sirve como modelo de la geometría hiperbólica(no son rectas del espacio euclídeo). Debe tenerse en cuenta que de acuerdo con la teoría de modelos los conceptos"punto", "recta" y "paralela" pueden interpretarse como distintos tipos de entidades, según el modelo elegido pararepresentar los axiomas de la geometría.

Geometría elíptica 93
Modelos de la geometría elípticaExisten diversas "realizaciones euclídeas" de la geometría elíptica, es decir, existen modelos que satisfacen lospostulados de la geometría euclídea que pueden ser visualizados como objetos inmersos dentro de un espacioeuclídeo de dimensión superior:• Modelo (hiper)esférico, una superficie esférica bidimensional, inmersa en un espacio euclídeo tridimensional es
el modelo más simple que satisface los postulados de la geometría elíptica bidimensional. Análogamente elconjunto de vectores unitarios de también denominado n-esfera es un modelo de geometría elíptican-dimensional.
• Modelo proyectivo.• Proyección estereográfica.Este modelo de curvatura constante positiva admite también una representación como variedad riemanniana con untensor métrico dado por:
Donde a es una constante relacionada con la curvatura K = 1/a2, y las coordenadas (x, y) cubren un conjunto abiertode la superficie esférica dado por:
Igualmente, una hiperesfera de dimensión n, que está inmersa en el espacio euclídeo n+1 dimensional es un modelode geometría n-dimensional.
Referencias
Bibliografía• Robert M. Wald, General Relativity, Chicago University Press, ISBN 0-226-87033-2.• Lee, J.M. Riemannian manifolds: an introduction to curvature. GTM 176. ISBN 0-387-98271-X

Ecuación de segundo grado 94
Ecuación de segundo grado
Los puntos comunes de una parábola con el eje X (recta y = o), si loshubiese, son las soluciones reales de la ecuación cuadrática.
Una ecuación de segundo grado o ecuacióncuadrática es una ecuación algebraica de segundogrado.[1][2] Es decir que la mayor potencia de laincógnita considerada en la ecuación, es dos. Laexpresión general de una ecuación cuadrática es
donde x representa la variable y a, b y c son constantes;a es un coeficiente cuadrático (distinto de 0), b elcoeficiente lineal y c es el término independiente.
La gráfica de una función cuadrática es una parábola.La ecuación cuadrática proporciona las interseccionesde la parábola con el eje de las abscisas, que pueden seren dos puntos, en uno o ninguno.
Historia
Los primeros en tratar las ecuaciones de primer gradofueron los árabes, en un libro llamado Tratado de lacosa, y a la ciencia de hacerlo, Álgebra (del ár. algabruwalmuqabalah, reducción y cotejo). La cosa era laincógnita. La primera traducción fué hecha al latín enEspaña, y como la palabra árabe la cosa suena algoparecido a la X española medieval (que a veces ha dadoJ y otra X porque su sonido era intermedio, como en Mexico/Méjico, Ximénez/Jiménez), los matemáticos españolesllamaron a la cosa X y así sigue.Para resolver ecuaciones de primer y segundo grado, el hombre no encontró gran dificultad, la situación fuecompletamente diferente para ecuaciones de grado mayor de 2. En efecto, la ecuación general de tercer grado:... ax3 + bx2 + cx + d = 0requirió consideraciones bastante profundas y resistió todos los esfuerzos de los matemáticos de la antigüedad. Sólose pudieron resolver a principios del siglo XVI, en la Era del Renacimiento en Italia. Aquí se presentará el ambienteen que aconteció el descubrimiento de la solución de las ecuaciones de tercer grado o cúbicas. Los hombres queperfeccionaron las cúbicas, italianos todos, constituyeron un grupo de matemáticos tan pintoresco como nunca se hadados en la historia. La mayoría de ellos eran autodidactas, trabajaban en contabilidad, en problemas de interéscompuesto y de seguros.

Ecuación de segundo grado 95
Fórmula cuadráticaDe una ecuación cuadrática con coeficientes reales o complejos existen siempre dos soluciones, no necesariamentedistintas, llamadas raíces, que pueden ser reales o complejas. Se denomina fórmula cuadrática[3] a la ecuación queproporciona las raíces de la ecuación cuadrática:
,
donde el símbolo ± indica que los valores
y
constituyen las dos soluciones.
Discriminante
Ejemplo del signo del discriminante: < 0: no posee soluciones reales;
= 0: posee una solución real (multiplicidad 2); > 0: posee dos soluciones reales distintas.
En la fórmula anterior, la expresión dentro de la raízcuadrada recibe el nombre de discriminante de laecuación cuadrática. Suele representarse con la letra Do bien con el símbolo Δ (delta):
Una ecuación cuadrática con coeficientes reales tiene obien dos soluciones reales distintas o una sola soluciónreal de multiplicidad 2, o bien dos raíces complejas. Eldiscriminante determina la índole y la cantidad deraíces.
•• Dos soluciones reales y diferentes si el discriminantees positivo (la parábola cruza dos veces el eje de lasabscisas: X):
.
• Una solución real doble si el discriminante es cero(la parábola sólo toca en un punto al eje de lasabscisas: X):
• Dos números complejos conjugados si el discriminante es negativo (la parábola no corta al eje de las abscisas: X):
donde i es la unidad imaginaria.En conclusión, las raíces son distintas si el discriminante es no nulo, y son números reales si –sólo si– eldiscriminante es no negativo.

Ecuación de segundo grado 96
Ecuación bicuadráticaExpresada de modo más general, una ecuación cuadrática en es de la forma:
con n un número natural y a distinto de cero. El caso particular de esta ecuación donde n = 2 se conoce comoecuación bicuadrática.
ClasificaciónLa ecuación de segundo grado se clasifica de la manera siguiente:[cita requerida]
1. Completa. Es la forma canónica:
donde las tres literales: a, b y c, son distintas de cero.Esta ecuación admite tres maneras para las soluciones: 1) dos números reales y diferentes; 2) dos números reales eiguales (un número real doble); 3) dos números complejos conjugados, según el valor del discriminante
ya sea positivo, cero o negativo, respectivamente.Se resuelven por factorización, o por el método de completar el cuadrado o por fórmula general. Esta fórmula sededuce más adelante.2. Incompleta pura. Puede expresarse de las dos maneras siguientes:
donde los valores de a y de c son distintos de cero. Se resuelve despejando x mediante operaciones inversas. Susolución son dos raíces reales que difieren en el signo si los valores de a y de c son de signo contrario, o bien dosnúmeros imaginarios puros que difieren en el signo si los valores de a y de c son del mismo signo.Una ecuación cuadrática incompleta:
con a distinto de cero. Prácticamente aparece muy raras veces. Por supuesto, su única solución de multiplicidad doses x = 0.3. Incompleta mixta. Se expresa así:
donde los valores de a y de b son distintos de cero. Se resuelve por factorización de x. Siempre su solución es latrivial x1 = 0. En números imaginarios no hay solución.
Deducción para resolver la ecuación de la forma La ecuación de segundo grado se puede simplificar dividiendo por el coeficiente líder, de forma que
Si usamos otras letras para simplificarlo de forma que y la demostración (que es algo más
sencilla) queda como sigue:Desde la ecuación
Transponiendo n

Ecuación de segundo grado 97
Sumando a ambos términos
Simplificamos el primer término a un binomio cuadrado
Extrayendo la raíz cuadrada a los dos miembros
Transponiendo y simplificando la fraccion de la raíz
Simplficando a común denominador
si deshacemos el cambio de variables, obtenemos el resultado
La demostración sin cambio de variables se puede ver aquí:
Demostración
•• Partimos de nuestra ecuación simplificada:
• Pasamos al otro término :
• Sumamos para obtener un binomio desarrollado:
•• Simplificamos el binomio el primer término y a comúndenominador el segundo:
Extrayendo las 2 posibles raices cuadradas, obtenemos:
Moviendo y aplicando la raíz al denominador:
Simplficando a común denominador:

Ecuación de segundo grado 98
Teorema de Cardano-ViètePartiendo de que tenemos una ecuación cuadrática con raices , podemos construir el binomio a partir de estascon
De lo que se deduceSuma de raíces
Demostración
•• Partiendo de igualar los términos delmismo grado
•• Se despeja la suma y se divide por x
Demostración
•• Partiendo del uso de la fórmula resolvente
•• Se suman los numeradores. Las raíces desaparecen, porser opuestas
•• Simplificando, queda:
Producto de raíces
Demostración
•• Partiendo de igualar los términos delmismo grado
•• Se despeja el producto de raices
Demostración

Ecuación de segundo grado 99
•• Partiendo del uso de la fórmula resolvente
• Realizando la multiplicación, por medio del producto de binomios conjugadosen el numerador:
•• Resolviendo las potencias, resulta:
• Distribuyendo el signo «menos» y sumando en el numerador
•• Simplificando, queda
Para obtener la diferencia de raíces se puede hacer uso de la identidad de Legendre.
Demostración
•• Solo es necesario desarrollar los binomios
•• Donde finalmente queda
Solución mediante cambio de variableUna manera sencilla de resolver una ecuación de segundo grado (también de los grados tercero y cuarto) consiste enaplicar un cambio de variable. En el caso de la ecuación de segundo grado del tipo , el cambiode variable se efectúa mediante .Aplicando el cambio de variable anterior se obtiene la ecuación Desarrollándola queda (1).Ahora se debe reducir la ecuación obtenida a un caso conocido del cual se conozca su solución. Es evidente que lasecuaciones de segundo grado del tipo se resuelven directamente extrayendo la raíz cuadrada de ambostérminos, cuya solución general es .Para transformar la ecuación (1) en una ecuación con el término de primer grado igual a cero se debe forzar que
, es decir
Sustituyendo en (1) queda . (2)
Esta nueva ecuación está en la forma , que es lo pretendido mediante el cambio de variable, y que −comose expresó− su solución es inmediata, del tipo
Por tanto, despejando la variable en la ecuación (2), queda
Dado que , y que , se obtiene la solución de la ecuación original con variable en , que es

Ecuación de segundo grado 100
El artificio de esta demostración consiste en aplicar un cambio de variable que reduce la ecuación de segundo gradogeneral a otra ecuación más sencilla y de solución inmediata.
Otros procedimientos de solución
Solución por descomposición de factoresUn modo fácil y sencillo de resolver una ecuación de 2º grado es mediante el método de factorización oDescomposición en factores. A continuación se explica paso a paso este método, según el libro de Álgebra de A.Baldor.Pasos
•• Simplificar la ecuación y ponerla en la forma
•• Factorice el primer miembro de la ecuación•• Iguale a cero los factores obtenidos para obtener el valor de xEjemplo: Resolver
Paso No.1 ---->
Paso No.2
Paso No.3 --->
--->
Nota. En caso de que dude del resultado multiplique ambos factores. Ejemplo: (x + 8 )(x - 3 ) = (x)(x) - 3(x) + 8(x) -24 --> x2 - 3x + 8x - 24 --> x2 + 5x - 24Obviamente le regresará el valor de la ecuación.
Notas y referencias[1] Hazewinkel, Michiel, ed. (2001), « Ecuación cuadrática (http:/ / eom. springer. de/ http:/ / www. encyclopediaofmath. org/ index.
php?title=Quadratic_equation& oldid=14167. htm)» (en inglés), Encyclopaedia of Mathematics, Springer, ISBN 978-1556080104[2] Weisstein, Eric W. « Ecuación cuadrática (http:/ / mathworld. wolfram. com/ QuadraticEquation. html)» (en inglés). MathWorld. Wolfram
Research.[3] Weisstein, Eric W. « Fórmula cuadrática (http:/ / mathworld. wolfram. com/ QuadraticFormula. html)» (en inglés). MathWorld. Wolfram
Research.
Enlaces externosWikilibros• Wikilibros alberga un libro o manual sobre Ecuación cuadrática.• Ecuaciones cuadráticas (http:/ / www. disfrutalasmatematicas. com/ algebra/ ecuaciones-cuadraticas. html).
Disfruta las matemáticas, Pierce, Rod.• La ecuación de segundo grado, en descartes.cnice.mec.es (http:/ / descartes. cnice. mec. es/ materiales_didacticos/
Ecuacion_de_segundo_grado/ index. htm)• Vídeo explicativo de la ecuación cuadrática (http:/ / audiovisuales. uned. ac. cr/ mediateca/ videos/ 146/
ecuación-cuadrática-(ecuaciones-de-segundo-grado))

Ecuación de segundo grado 101
• Calculadora Ecuación de segundo grado (english) (http:/ / www. stud. feec. vutbr. cz/ ~xvapen02/ vypocty/kvadrov. php?language=english)
MediatrizLa mediatriz de un segmento es la recta perpendicular a dicho segmento trazada por su punto medio.Equivalentemente se puede definir como la recta cuyos puntos son equidistantes a los extremos del segmento.También se la llama simetral. Lugar geometrico de los puntos que equidistan de los extremos de un segmento AB.
Construcción gráfica de la mediatriz con regla ycompás.
Trazado de la mediatriz de un segmento
1. Trazamos el segmento AB.2. Con centro en A se traza una circunferencia de radio mayor que lamitad del segmento AB.3. Desde B se traza una circunferencia de igual radio que la primera.4. La recta que pasa por la intersección de las circunferencias es lamediatriz del segmento AB.Punto medio de un segmento La intersección de la mediatriz con lasegmento AB es el punto medio M.
Aplicación en triángulos
Las mediatrices de un triángulo se denomina circuncentro, el cual esel centro de la circunferencia que pasa por los vértices del triángulo, esdecir, de la circunferencia circunscrita al triángulo.
Demostración
En efecto, sea un segmento delimitado por los puntos y (véase la figura 1). Sea el punto medio del segmento y la rectaperpendicular al segmento por dicho punto. Sea un punto sobre larecta . En la simetría axial respecto de la recta , el punto es invariante y los puntos y son uno elsimétrico del otro. Por tanto, en esta simetría, el segmento se transforma en el segmento , ambossegmentos son congruentes y el punto equidista de los puntos y . En consecuencia, todo punto que seencuentre sobre la recta pertenece a la mediatriz del segmento en cuestión.
Recíprocamente, (véase figura 2) sea un segmento y sea un punto que equidista de y de , esto es,que los segmentos y son iguales. Consideremos la bisectriz del ángulo y sea laintersección de dicha bisectriz con el segmento .Por construcción, los ángulos y son iguales y en la simetría axial respecto de la recta setransforman uno en el otro. Como los segmentos y son iguales en esta simetría, los puntos y sonuno la imagen del otro. Concluimos que el punto es punto medio del segmento y que dicho segmento esperpendicular a la recta .

Mediatriz 102
CircuncentroEn todo triángulo ABC las mediatrices de sus tres lados concurren en un mismo punto, llamado el circuncentro (O)del triángulo. Dicho punto equidista de los vértices del triángulo. La circunferencia de centro O y de radio OA, pasapor los otros dos vértices del triángulo. Se dice que dicha circunferencia es circunscrita al triángulo y que el triánguloestá inscrito en la circunferencia.
La mediatriz de una cuerda pasa por elcentro de la circunferencia.
De izquierda a derecha, el circuncentro de un triángulo rectángulo, obtusángulo y acutángulo.
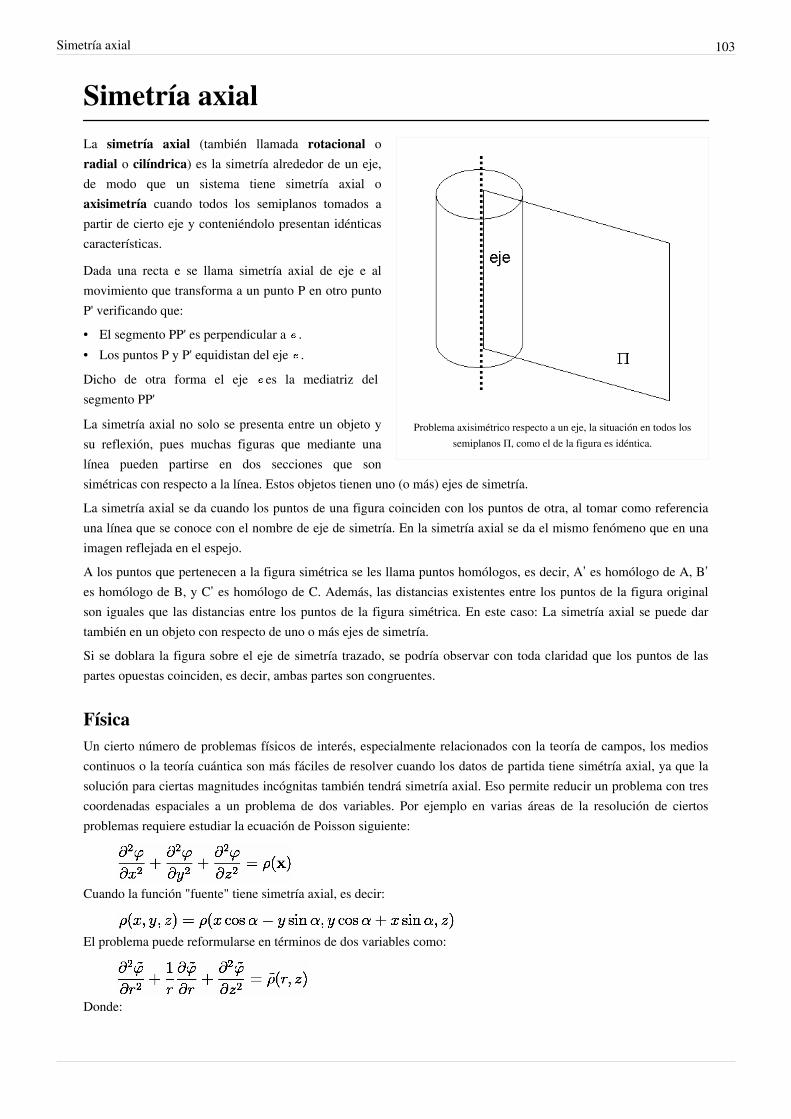
Simetría axial 103
Simetría axial
Problema axisimétrico respecto a un eje, la situación en todos lossemiplanos Π, como el de la figura es idéntica.
La simetría axial (también llamada rotacional oradial o cilíndrica) es la simetría alrededor de un eje,de modo que un sistema tiene simetría axial oaxisimetría cuando todos los semiplanos tomados apartir de cierto eje y conteniéndolo presentan idénticascaracterísticas.
Dada una recta e se llama simetría axial de eje e almovimiento que transforma a un punto P en otro puntoP' verificando que:• El segmento PP' es perpendicular a .• Los puntos P y P' equidistan del eje .Dicho de otra forma el eje es la mediatriz delsegmento PP'
La simetría axial no solo se presenta entre un objeto ysu reflexión, pues muchas figuras que mediante unalínea pueden partirse en dos secciones que sonsimétricas con respecto a la línea. Estos objetos tienen uno (o más) ejes de simetría.La simetría axial se da cuando los puntos de una figura coinciden con los puntos de otra, al tomar como referenciauna línea que se conoce con el nombre de eje de simetría. En la simetría axial se da el mismo fenómeno que en unaimagen reflejada en el espejo.A los puntos que pertenecen a la figura simétrica se les llama puntos homólogos, es decir, A’ es homólogo de A, B’es homólogo de B, y C’ es homólogo de C. Además, las distancias existentes entre los puntos de la figura originalson iguales que las distancias entre los puntos de la figura simétrica. En este caso: La simetría axial se puede dartambién en un objeto con respecto de uno o más ejes de simetría.Si se doblara la figura sobre el eje de simetría trazado, se podría observar con toda claridad que los puntos de laspartes opuestas coinciden, es decir, ambas partes son congruentes.
FísicaUn cierto número de problemas físicos de interés, especialmente relacionados con la teoría de campos, los medioscontinuos o la teoría cuántica son más fáciles de resolver cuando los datos de partida tiene simétría axial, ya que lasolución para ciertas magnitudes incógnitas también tendrá simetría axial. Eso permite reducir un problema con trescoordenadas espaciales a un problema de dos variables. Por ejemplo en varias áreas de la resolución de ciertosproblemas requiere estudiar la ecuación de Poisson siguiente:
Cuando la función "fuente" tiene simetría axial, es decir:
El problema puede reformularse en términos de dos variables como:
Donde:

Simetría axial 104
Teoría de gruposDado un problema geométrico o físico caracterizado por un cierto número de magnitudes escalares opropiedades tensoriales se dice que el problema tiene simetría axial si existen representacionesFp,q del grupo SO(2):[1]
Tales que:
Esta última expresa la condición de que el hecho de rotar el sistema de ejes deja forminvariantes las cantidadesbásicas que caracterizan el problema.
Referencia
Notas[1][1] Galindo y Pascual, pp. 239-250.
Bibliografía• Girbau, J.: Geometria diferencial i relativitat, Ed. Universitat Autònoma de Barcelona, 1993. ISBN
84-7929-776-X.• Galindo, A. y Pascual P.: Mecánica cuántica, Ed. Eudema, Barcelona, 1989, ISBN 84-7754-042-X.

Simetría radial (biología) 105
Simetría radial (biología)
Una medusa, animal típicamente radial.
La simetría radial es la simetría definida por un eje heteropolar(distinto en sus dos extremos). El extremo que contiene la boca sellama lado oral, y su opuesto lado aboral o abactinal.
Sobre este eje, se establecen planos principales de simetría, los quedefinen las posiciones per-radiales. Las estructuras en otros planos(bisectrices de los per-radiales) quedan en posiciones inter-radiales.La zona entre los per-radiales y los inter-radiales es la zona ad-radial.
En el reino animal, la simetría radial se considera primitiva respecto ala simetría bilateral; presenta simetría radial primaria los cnidarios, losctenóforos y algunas esponjas. No obstante, la simetría radial perfectaes rara[1]; usualmente se modifica en birradial, como en ctenóforos ymuchas anémonas, con dos planos que dividen al animal en las aguasdel exterior se ve la simetría radial iguales, o tetrarradial, como muchasmedusas, con cuatro planos de simetría. Los equinodermos poseen unasimetría pentarradial secundaria derivada de la simetría bilateral.
La simetría radial (y sus especializaciones) está más extendida enanimales sésiles y sedentarios, y en animales pelágicos a la deriva, enlos que resulta claramente ventajoso poder enfrentarse al entorno envarias direcciones por igual, con los receptores sensoriales y las estructuras para la alimentación (tentáculos, brazos)distribuidos regularmente en la periferia del cuerpo.
Referencias[1] Brusca, R. C. & Brusca, G. J., 2005. Invertebrados, 2ª edición. McGraw-Hill-Interamericana, Madrid (etc.), XXVI+1005 pp. ISBN
0-87893-097-3.

Distancia focal 106
Distancia focal
El foco F y la distancia focal f deuna lente positiva (convexa), una
lente negativa (cóncava), unespejo cóncavo, y un espejo
convexo.
La distancia focal o longitud focal de una lente es la distancia entre el centro ópticode la lente o plano nodal posterior y el foco (o punto focal) cuando enfocamos alinfinito. La inversa de la distancia focal de una lente es la potencia.
Para una lente positiva (convergente), la distancia focal es positiva. Se define comola distancia desde el eje central de la lente hasta donde un haz de luz de rayosparalelos colimado que atraviesa la lente se enfoca en un único punto. Para una lentenegativa (divergente), la distancia focal es negativa. Se define como la distancia quehay desde el eje central de la lente a un punto imaginario del cual parece emerger elhaz de luz colimado que pasa a través de la lente.
Para un espejo con curvatura esférica, la distancia focal es igual a la mitad del radiode curvatura del espejo. La distancia focal es positiva para un espejo cóncavo, ynegativa para un espejo convexo.
Distancia hiperfocal 107
Distancia hiperfocal
Objetivo con en punto de enfoque en infinito.
La distancia hiperfocal de un objetivo es la mínima distancia a la quese percibe el sujeto de un modo nítido cuando el punto de enfoque delobjetivo se coloca en el infinito ( ). Esta distancia es la posicióndel enfoque que proporciona una mayor profundidad de campo.[1]
Definición
Se puede expresar de dos formas:
•• Es la distancia desde el plano nodal anterior, o centro óptico de la lente, hasta el primer plano apreciablementenítido cuando enfocamos a infinito.
• En fotografia, si se enfoca a esa distancia, la profundidad de campo se extiende desde la mitad de esa distanciahiperfocal hasta infinito.
Hay que considerar que como la hiperfocal es la distancia del centro óptico de objetivo hasta el punto calculado de laescena, la distancia de enfoque sería la resultante de sumar esa hiperfocal más la distancia del objetivo a la película osensor. Proceso que se simplifica considerando la hiperfocal como distancia de enfoque porque se desprecia en lamayoría de los casos esta distancia adicional.
FórmulaSe puede calcular mediante la expresión:
Donde H es la distancia hiperfocal, F es la distancia focal, N es el número-f, y CCM es el círculo de confusiónmáximo.De élla se puede deducir que será mayor para los teleobjetivos que para los objetivos de gran angular por lo que éstosúltimos tendrán una mayor profundidad de campo con carácter general. Inversamente unos números f mayoresproducirán una distancia hiperfocal menor y por consiguiente mayor profundidad de campo.
Utilidad prácticaEn las cámaras con «foco fijo» la distancia hiperfocal se utilizaba para obtener la máxima profundidad de campo paracualquier situación situando en punto de enfoque en élla para la máxima apertura.
Referencias[1] Langford, M.. Enciclopedia completa de la fotografía. Madrid: Hermann Blume ediciones. pp. 119. ISBN 84-7214-276-0.
Lugar geométrico 108
Lugar geométricoUn lugar geométrico es un conjunto de puntos que satisfacen determinadas propiedades geométricas.
En el planoEjemplos de lugares geométricos en el plano:• El lugar geométrico de los puntos que equidistan a dos puntos fijos y (los dos extremos de un segmento de
recta, por ejemplo) es una recta, llamada mediatriz. Dicho de otra forma, la mediatriz es la recta que se intersecaperpendicularmente con un segmento en su punto medio ( ).
• La bisectriz es también un lugar geométrico. Fijado un ángulo, delimitado por dos rectas, la bisectriz es la rectaque, pasando por el vértice (punto donde se cortan dichas rectas), lo divide por la mitad. Esta recta cumple lapropiedad de que todos sus puntos equidistan a las rectas anteriores, convirtiéndose la bisectriz en un casoparticular del lugar geométrico que sigue a continuación.
• Generalizando la propiedad de equidistancia a dos rectas, obtenemos que la paralela media es el lugar geométricode los puntos que las equidistan. Se observa que, bajo el punto de vista de que las rectas paralelas se cortan en elinfinito -se elimina, pues, la noción de paralelismo-, pasa a ser un sinónimo de la bisectriz, donde el ángulo hatomado valor nulo. Si, por el contrario, se diferencia el concepto de paralelismo, la bisectriz vuelve a ser, como seha dicho antes, un caso particular de esta definición y el caso de rectas paralelas, con ángulo 0, es disjunto al delas bisectrices (ángulo no nulo).
Secciones cónicasLas secciones cónicas pueden ser descritas mediante sus lugares geométricos:• La circunferencia es el lugar geométrico de los puntos cuya distancia a un punto determinado, el centro, es un
valor dado (el radio).• La elipse es el lugar geométrico de los puntos tales que la suma de su distancia a dos puntos fijos, los focos, es
una constante dada (equivalente a la longitud del semieje mayor de la elipse).• La parábola es el lugar geométrico de los puntos cuya distancia a un foco equivale a su distancia a una recta
llamada directriz.• La hipérbola es el lugar geométrico de los puntos tales que el valor absoluto de la diferencia entre sus distancias a
dos puntos fijos, los focos, es igual a una constante (positiva), que equivale a la distancia entre los vértices.
En el espacioFiguras geométricas muy complejas pueden ser descritas mediante el lugar geométrico generado por los ceros de unafunción o de un polinomio. Por ejemplo, las cuádricas están definidas como el lugar geométrico de los ceros depolinomios cuadráticos.En general, los lugares geométricos generados por los ceros del conjunto de polinomios reciben el nombre devariedad algebraica, las propiedades de dichas variedades se estudian en la geometría algebraica.
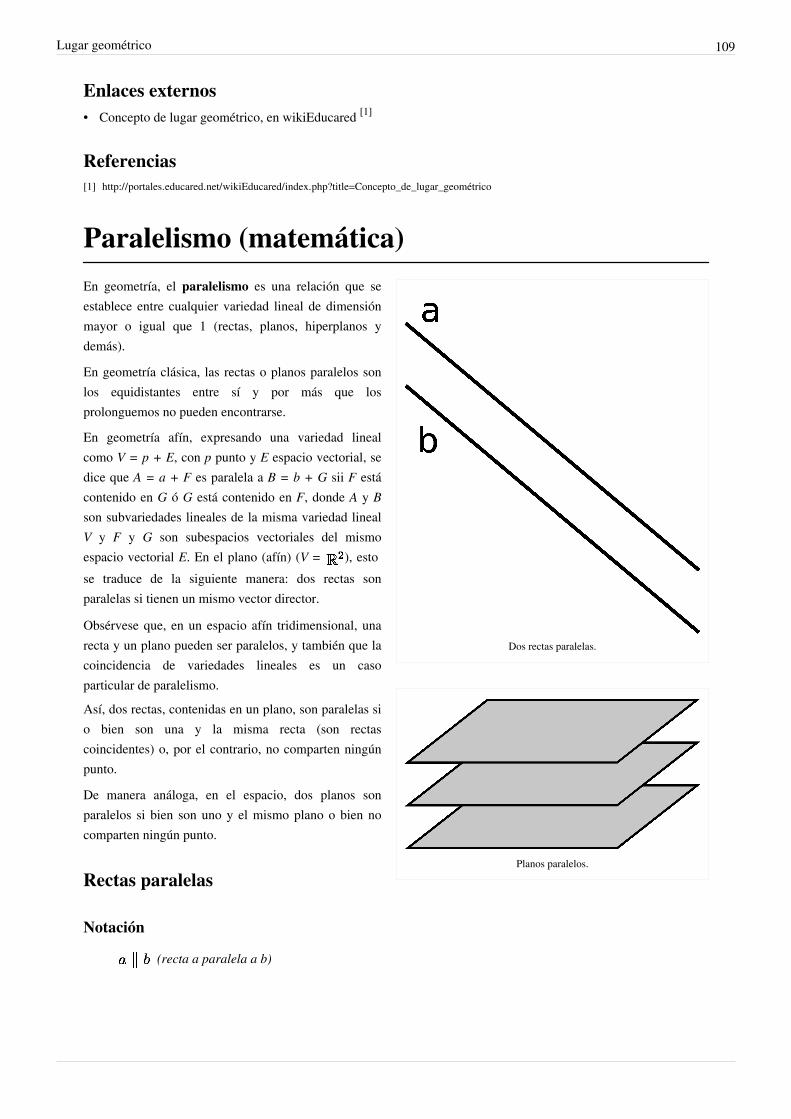
Lugar geométrico 109
Enlaces externos• Concepto de lugar geométrico, en wikiEducared [1]
Referencias[1] http:/ / portales. educared. net/ wikiEducared/ index. php?title=Concepto_de_lugar_geométrico
Paralelismo (matemática)
Dos rectas paralelas.
Planos paralelos.
En geometría, el paralelismo es una relación que seestablece entre cualquier variedad lineal de dimensiónmayor o igual que 1 (rectas, planos, hiperplanos ydemás).
En geometría clásica, las rectas o planos paralelos sonlos equidistantes entre sí y por más que losprolonguemos no pueden encontrarse.
En geometría afín, expresando una variedad linealcomo V = p + E, con p punto y E espacio vectorial, sedice que A = a + F es paralela a B = b + G sii F estácontenido en G ó G está contenido en F, donde A y Bson subvariedades lineales de la misma variedad linealV y F y G son subespacios vectoriales del mismoespacio vectorial E. En el plano (afín) (V = ), estose traduce de la siguiente manera: dos rectas sonparalelas si tienen un mismo vector director.
Obsérvese que, en un espacio afín tridimensional, unarecta y un plano pueden ser paralelos, y también que lacoincidencia de variedades lineales es un casoparticular de paralelismo.Así, dos rectas, contenidas en un plano, son paralelas sio bien son una y la misma recta (son rectascoincidentes) o, por el contrario, no comparten ningúnpunto.
De manera análoga, en el espacio, dos planos sonparalelos si bien son uno y el mismo plano o bien nocomparten ningún punto.
Rectas paralelas
Notación
(recta a paralela a b)
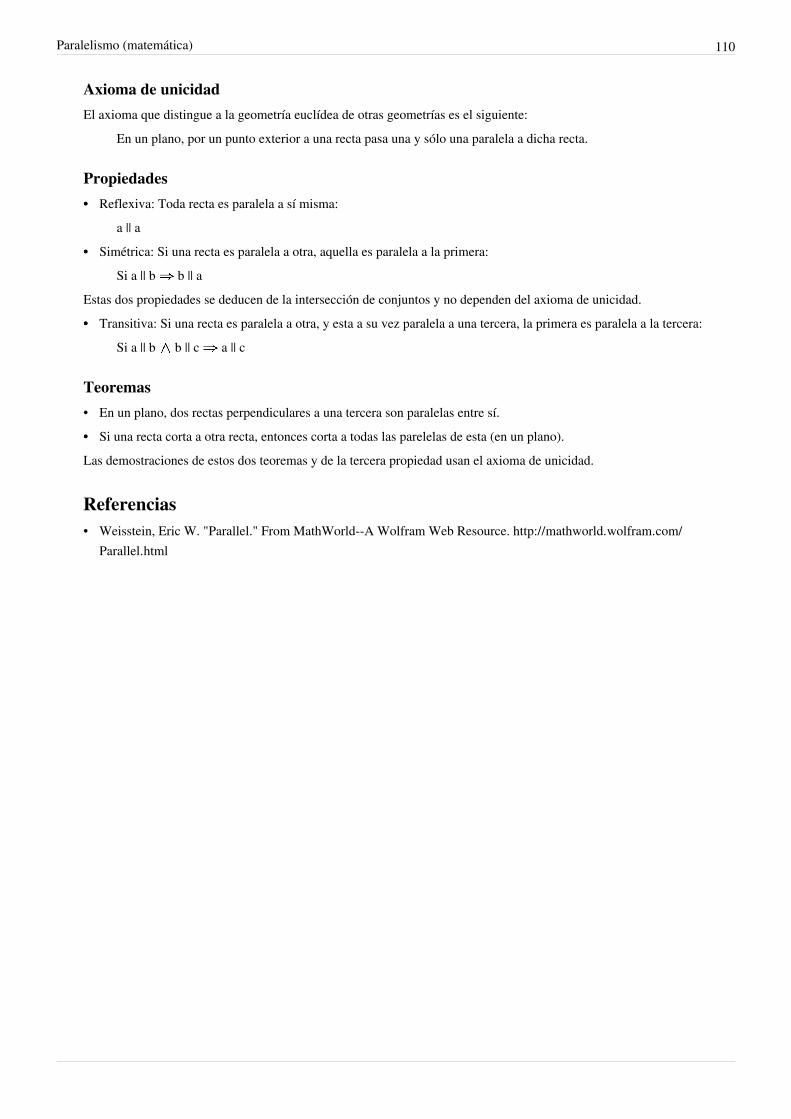
Paralelismo (matemática) 110
Axioma de unicidadEl axioma que distingue a la geometría euclídea de otras geometrías es el siguiente:
En un plano, por un punto exterior a una recta pasa una y sólo una paralela a dicha recta.
Propiedades•• Reflexiva: Toda recta es paralela a sí misma:
a || a•• Simétrica: Si una recta es paralela a otra, aquella es paralela a la primera:
Si a || b b || aEstas dos propiedades se deducen de la intersección de conjuntos y no dependen del axioma de unicidad.•• Transitiva: Si una recta es paralela a otra, y esta a su vez paralela a una tercera, la primera es paralela a la tercera:
Si a || b b || c a || c
Teoremas• En un plano, dos rectas perpendiculares a una tercera son paralelas entre sí.•• Si una recta corta a otra recta, entonces corta a todas las parelelas de esta (en un plano).Las demostraciones de estos dos teoremas y de la tercera propiedad usan el axioma de unicidad.
Referencias• Weisstein, Eric W. "Parallel." From MathWorld--A Wolfram Web Resource. http:/ / mathworld. wolfram. com/
Parallel. html

Geometría afín 111
Geometría afínEn la matemática, la geometría afín es el estudio de las propiedades geométricas que permancen inmutables bajotransformaciones afines, como por ejemplo las transformaciones lineales no singulares y traslaciones. El nombre degeometría afín así como el de geometría proyectiva y geometría euclídea se sigue naturalmente del programaErlangen de Felix Klein.La geometría afín es un tipo de geometría donde la noción de ángulo está indefinida y las distancias no pueden sercomparadas en diferentes direcciones, es decir, los tercer y cuarto postulados de Euclides son ignorados. Muchas delas propiedades afines son familiares de la geometría euclidea, pero además aplicables a un espacio de Minkowski.Esas propiedades de la geometría euclidea que son preservadas por una proyección paralela de un plano a otro sonafines. De hecho, la geometría afín es una generalización de la geometría euclídea caracterirazada por una distorsiónen la escala e inclinación. La geometría proyectiva es más general que la afín dado que esta puede ser derivada delespacio proyectivo mediante una "especialización" de cualquier plano.En el lenguage del programa Erlagen de Klein, la simetría geometría afín viene dada por el grupo de afinidades, esdecir, el grupo de transformaciones generadas por las transformaciones lineales de un espacio vectorial en si mismomediante la traslacion por un vector.La geometría afín puede ser desarrollada con la base de un álgebra lineal. Se puede definir el espacio afín como unconjunto de puntos equipados con un conjunto de transformaciones que forma el grupo aditivo de un espaciovectorial sobre un cuerpo dado, y tal que para cualquier par de puntos existe una única tranlación que lleva elprimero al segundo. En términos más específicos, se tiene una operación que asocia a cualquier par de puntos unvector, de modo que este da una traslación de un punto al otro, cuya operación verifica unos ciertos axiomas.Tomando cualquier punto como el origen, el resto de puntos están univocamente correspondidos con un vector, estopermite caracterizar el espacio afín con su espacio vectorial asociado ignorando el origen.
HistoriaEuler introdujo el término afin. Solo después del programa Erlangen de Felix Klein se reconoció la geometría afíncomo una generalización de la geometría euclídea.
Axiomas de la geometría afínUn tratamiento axiomático del plano afín puede ser construido a partir de los axiomas de la geometría ordenada,añadiendo dos axiomas adicionales.1.1. Postulado de las paralelas: Dado un punto A y una recta r que no pasa por A, existe a lo sumo una recta que pasa
por A y no corta a r.1. (Teorema de Desargues) Dados siete puntos distintos A, A', B, B', C, C', O, tales que AA', BB' y CC' son rectas
distintas que pasan por O y AB es paralelo a A'B' y BC es paralelo a B'C', entonces AC es paralelo a A'C'.El concepto afín del paralelismo forma una relación de equivalencia entre rectas. Dado que los axiomas de lageometría ordenada presentados aqui incluyen propiedades que implican la estructura de los números reales, talespropiedades son la axiomatización de la geometría afín sobre el cuerpo de los números reales.

Espacio afín 112
Espacio afín
No hay puntos distinguidos por definición
Históricamente, la noción de espacio afín procede del descubrimientode nuevas geometrías perfectamente coherentes diferentes de laGeometría Euclidiana que revisan los conceptos de longitud, asociadascon el de distancia y de ángulo propias de la geometría de Euclides. Elresultado es una geometría en la que el espacio se presenta como unaestructura matemática próxima a la del espacio vectorial.
DefiniciónEl espacio afín puede definirse de varios modos equivalentes.
• Dado un cuerpo con elemento neutro 0 para la operación suma y 1 para el producto. Los elementos del cuerpose llaman escalares y se representaran mediante letras griegas minúsculas ( ,...).
• Dado un espacio vectorial sobre el cuerpo con elemento neutro . Los elementos de este espaciovectorial reciben el nombre de vectores y son representados mediante letras ( , ,...).
• Dado un conjunto no vacío , sus elementos recibiran el nombre de « puntos » y son designados medianteletras ( ,...)
Nota: las parejas de elementos de , esto es los elementos de son llamados « bipuntos
»[cita requerida]; el primer elemento de una de tales parejas recibe el nombre de « origen » y el segundo el de «extremo del bipunto.
Dado un conjunto no vacío diremos que es un espacio afín asociado a un espacio vectorial si se tiene lasiguiente aplicación [1]:
Visualización del orden de lospuntos para o comoorigen y destino de una
traslación.
tal que se cumplan:1) Fijado un punto a la aplicación es biyectiva, es decir:

Espacio afín 113
2) Se tiene la relación de Chasles, es decir:
Los elementos de se llaman puntos.
Se designa al vector por la notación , así la propiedad 2 se escribe como:
La dimensión de un espacio afín es la dimensión del espacio vectorial asociado.Observación:
La aplicación asocia dos puntos a un único vector, por lo que se dice que el primer punto es el origen y elsegundo el extremo.
Propiedades elementalesDe la definición del espacio afín resultan las siguientes propiedades:
Dados y puntos cualesquiera en un espacio afín . Tenemos:
•
Demostración
.entonces como es biyectiva, se tiene que
. .
•
Demostración
• (regla del paralelogramo).
Demostración

Espacio afín 114
• (relación de Chasles generalizada)
TraslacionesDado un vector , una traslación sobre un espacio afín es la aplicación dada por:
Observación:
Esta aplicación queda bien definida a partir de la aplicación definida para el espacio afín, tomando
PropiedadesDados los vectores se tiene:
• Si •
•
Referencias[1] Es común denominar a como espacio director, también se define como "espacio afín sobre " denotado por la terna en
Máximo Anzola o "espacio afín sobre " en M. Castellet
Bibliografía• Manuel Castellet, Irene Llerena, Álgebra lineal y geometría, Editorial reverté, S.A., 2000.• Máximo Anzola, José Caruncho, Geometría afín y euclídea, Pedidos a los Autores,1981.• J.M. Aroca Hernández-Ros, Problemas de geometría afín y geometría métrica, uva, 2004.• Berger, Marcel (1987), Geometry I, Berlin: Springer, ISBN 3-540-11658-3
• Nomizu, K.; Sasaki, S. (1994), Affine Differential Geometry (New edición), Cambridge University Press, ISBN
978-0-521-44177-3

Distancia 115
Distancia
Plano de Manhattan. La distancia euclidiana(segmento verde), no se corresponde con el
«camino más corto posible» ente dos puntos dedicha ciudad, además de no ser único.
La menor distancia entre dos puntos recorridasobre la superficie de una esfera es un arco de
círculo máximo: la ortodrómica.
En matemática, es la distancia entre dos puntos del espacio euclídeoequivale a la longitud del segmento de recta que los une, expresadonuméricamente. En espacios más complejos, como los definidos en lageometría no euclidiana, el «camino más corto» entre dos puntos es unsegmento de curva.
En física, la distancia es una magnitud escalar, que se expresa enunidades de longitud o tiempo.
Distancia en geometría
Se denomina distancia euclídea entre dos puntos ydel plano a la longitud del segmento de recta que tiene por
extremos y . Puede calcularse así:ó también :
La distancia entre un punto y una recta es la longitud delsegmento conocido como recta prosibola de recta que es perpendiculara la recta y la une al punto .Puede calcularse así:
donde | | denota valor absoluto.La distancia entre dos rectas paralelas es la longitud del segmento derecta perpendicular a ambas que las une.
La distancia entre un punto y un plano es la longitud delsegmento de recta perpendicular al plano
que lo une al punto y puede calcularse así:
Definición formalDesde un punto de vista formal, para un conjunto de elementos se define distancia o métrica como cualquierfunción binaria de en que verifique las siguientes condiciones:
• No negatividad: • Simetría: • Desigualdad triangular: • .• Si son tales que , entonces .Si dejamos de exigir que se cumpla esta última condición, al concepto resultante se le denomina pseudodistancia opseudométrica.

Distancia 116
La distancia es el concepto fundamental de la Topología de Espacios Métricos. Un espacio métrico no es otra cosaque un par , donde es un conjunto en el que definimos una distancia .
En el caso de que tuviéramos un par y fuera una pseudodistancia sobre , entonces diríamos quetenemos un espacio pseudométrico.Si es un espacio métrico y , podemos restringir a de la siguiente forma:
de forma que si entonces (es decir, ). Laaplicación es también una distancia sobre , y como comparte sobre los mismos valores que , sedenota también de la misma manera, es decir, diremos que es subespacio métrico de .
Distancia de un punto a un conjunto
Si es un espacio métrico, , y , podemos definir la distancia del punto alconjunto de la siguiente manera:
.Es de destacar las siguientes tres propiedades:• En primer lugar, en las condiciones dadas, siempre existirá esa distancia, pues tiene por dominio ,
así que para cualquier existirá un único valor real positivo . Por la completitud de y como laimagen de d está acotada inferiormente por 0, queda garantizada la existencia del ínfimo de ese conjunto, esto es,la distancia del punto al conjunto.
• Si entonces .• Puede ser que pero , por ejemplo si es un punto de adherencia de . De hecho, la
clausura de es precisamente el conjunto de los puntos de que tienen distancia 0 a .Los casos de distancia de un punto a una recta o de distancia de un punto a un plano no son más que casosparticulares de la distancia de un punto a un conjunto, cuando se considera la distancia euclídea. (la fórmula dedistancia de un punto a una recta está incorrecta, traten de solucionar, por favor)
Distancia entre dos conjuntos
Si es un espacio métrico, y , , , podemos definir la distancia entrelos conjuntos y de la siguiente manera:
.Por la misma razón que antes, siempre está definida. Además , pero puede ocurrir que
y sin embargo . Es más, podemos tener dos conjuntos cerrados cuya distancia sea 0 y sinembargo sean disjuntos, e incluso que tengan clausuras disjuntas.Por ejemplo, el conjunto y el conjunto . Por un lado,
, y , y por otro .La distancia entre dos rectas, la distancia entre dos planos, etc. no son más que casos particulares de la distanciaentre dos conjuntos cuando se considera la distancia euclídea.

Perpendicularidad 117
PerpendicularidadPara el término náutico semejante, véase perpendicular de proa y popa.
La semirrecta AB es perpendicular a la recta CD, porque los dosángulos que conforma son de 90 grados (en naranja y azul,
respectivamente).
En matemáticas, la condición de perpendicularidad(del latín per-pendiculum «plomada») se da entre dosentes geométricos que se cortan formando un ángulorecto. La perpendicularidad es una propiedadfundamental estudiada en geometría y trigonometría,por ejemplo en los triángulos rectángulos, que poseen 2segmentos «perpendiculares».
La noción de perpendicularidad se generaliza a la deortogonalidad.
Relaciones
La relación de perpendicularidad se puede dar entre:• Rectas: dos rectas coplanarias son perpendiculares
cuando, al cortarse, dividen al plano en cuatroregiones iguales, cada una de los cuales es un ángulorecto. Al punto de intersección de dos rectasperpendiculares se le llama pie de cada una de ellas en la otra.
• Semirrectas: dos semirrectas son perpendiculares, cuando conforman ángulos rectos teniendo o no el mismopunto de origen.
• Planos: dos planos son perpendiculares cuando conforman cuatro ángulos diedros de 90º.• Semiplanos: dos semiplanos son perpendiculares cuando conforman ángulos diedros de 90°; generalmente,
compartiendo la misma recta de origen.Además, puede existir una relación de perpendicularidad entre los cuatro elementos anteriores, tomados de dos endos.Si dos rectas al cortarse forman ángulos adyacentes congruentes, son perpendiculares. Por analogía, si dos planos alcortarse forman ángulos diedros adyacentes congruentes, son perpendiculares. Los lados de un ángulo diedro y sussemiplanos opuestos determinan dos planos perpendiculares.

Perpendicularidad 118
Construcción de la perpendicular a una recta por un punto dado
Construcción de la perpendicular (azul) a la línea AB a través delpunto P.
Para construir una perpendicular a la línea AB a travésdel punto P usando regla y compás, se procede comosigue:
• Paso 1 (rojo):se dibuja uncírculo concentro en Ppara crear lospuntos A' yB' en la líneaAB, loscuales sonequidistantesa P.
•• Paso 2(verde): se dibujan dos círculos centrados en A' y B', pasando los dos porP. Sea Q el otro punto de intersección de estos dos círculos.
•• Paso 3 (azul): se unen P y Q para obtener la recta perpendicular PQ.Para probar que PQ es perpendicular a AB, se utiliza el criterio de congruencia LLL para los triángulos QPA' y QPB'para demostrar que los ángulos OPA' y OPB' son iguales. Luego se usa el criterio LAL para los triángulos OPA' yOPB' para demostrar que los ángulos POA y POB son iguales.

Perpendicularidad 119
Postulado de unicidadEn un plano, por un punto perteneciente o exterior a una recta pasa una y solo una recta perpendicular.
Con relación a líneas paralelas
Las líneas a y b son paralelas, como se ve por loscuadrados, y están cortadas por la línea perpendicular
c.
Como se ve en la figura, si dos líneas (a y b) son perpendiculares auna tercera línea (c), todos los ángulos formados en la tercera líneason ángulos rectos. Por lo tanto, en Geometría euclidiana,cualquier par de líneas que son perpendiculares a una tercera líneason paralelas entre sí, debido al quinto postulado de Euclides. Porel contrario, si una línea es perpendicular a una segunda línea,también es perpendicular a cualquier línea paralela a la segundalínea.
En la figura, todos los ángulos naranjas son congruentes entre sí ytodos los ángulos verdes son congruentes entre sí, porque losángulos opuestos por el vértice son congruentes y los ángulosalternos interiores formados por un corte transversal de líneasparalelas son congruentes. Por lo tanto, si las líneas a y b sonparalelas, cualquiera de las conclusiones siguientes conduce atodas las demás:
•• Uno de los ángulos del diagrama es un ángulo recto.•• Uno de los ángulos naranja es congruente con uno de los
ángulos verdes.• La línea c es perpendicular a la línea a.• La línea c es perpendicular a la línea b.
Referencias• Perpendicular [1]; Perpendiculares y paralelas [2], sitio «Disfruta las matemáticas».• Líneas perpendiculares [3] sitio «Diccionario visual de matemáticas».• Simmons, Bruce (2011), «perpendicular [4]» (en inglés), Mathwords.
Enlaces externos• Definición: perpendicular [5] Con animación (en inglés)• Cómo dibujar un bisector perpendicular de una línea con regla y compás [6] Con animación (en inglés)• Cómo dibujar una perpendicular al final de una línea con regla y compás [7] Con animación (en inglés)

Perpendicularidad 120
Referencias[1] http:/ / www. disfrutalasmatematicas. com/ definiciones/ perpendicular. html[2] http:/ / www. disfrutalasmatematicas. com/ geometria/ perpendiculares-paralelas. html[3] http:/ / www. rpdp. net/ mathdictionary/ spanish/ vmd/ system/ grd-k12-index. htm[4] http:/ / www. mathwords. com/ p/ perpendicular. htm[5] http:/ / www. mathopenref. com/ perpendicular. html[6] http:/ / www. mathopenref. com/ constbisectline. html[7] http:/ / www. mathopenref. com/ constperpendray. html
Ángulo diedro
Representación axonométrica convencional de unángulo diedro de 90° grados sexagesimales.
Un ángulo diedro es cada una de las dos partes del espaciodelimitadas por dos semiplanos que parten de una arista común. Es unconcepto geométrico ideal y sólo es posible representarlo parcialmentecomo dos paralelogramos con un lado común, que simbolizan dossemiplanos.
El valor de un ángulo diedro es la amplitud del menor ángulo posibleque conforman dos semirectas pertenecientes una a cada semiplano. Seobtiene tomando un plano auxiliar perpendicular a la recta común,siendo la apertura de las semirrectas intersección la medida del ángulodiedro.
En la imagen, los dos bordes delanteros o traseros de los semiplanos(representados por rectángulos en la imagen), si son perpendiculares ala recta común, sirven como referencia para medir el ángulo diedro.En geometría descriptiva se utilizan como planos de referencia los que forman un ángulo diedro de 90°.
Enlaces externos• Weisstein, Eric W. «Ángulo diedro [1]» (en inglés). MathWorld. Wolfram Research.
Referencias[1] http:/ / mathworld. wolfram. com/ DihedralAngle. html

Ángulos adyacentes 121
Ángulos adyacentes
Ángulos adyacentes.
Ángulos adyacentes son aquellos ángulos que tienen el vérticey un lado en común, al tiempo que sus otros dos lados sonsemirrectas opuestas. De allí resulta que los ángulos adyacentesson a la vez consecutivos y suplementarios, porque juntosequivalen a un ángulo llano (180°), sin poseer ningún puntointerior en común.[1][2][3]
Otros autores denominan ángulosadyacentes a los ángulos consecutivos.
En la literatura del tema es posible también encontrar casos donde sedenomina como adyacentes a cualquier par de ángulos que compartan elvértice y un lado, aunque no sean suplementarios (es decir, se llamanadyacentes a los ángulos que en otros textos se denominan consecutivos),[4][5]
quizás debido a la influencia del inglés en donde adjacent angles tiene estesignificado. Por ello es importante al abordar un texto sobre el tema, tenerpresente cual es la convención usada. En este artículo se efectúa la distinción,considerando únicamente el caso en que los lados no comunes formen unalínea recta, reservando el artículo ángulos consecutivos para la otra acepción.
Propiedades•• Los senos de los angulos adyacentes son los mismos, por ejemplo:
sin( 120° ) = sin( 60° )sin( α° ) = sin( 180° - α° )sin( α ) = sin( π - α )
•• Los cosenos de los ángulos adyacentes son de igual valor absoluto, pero de signo inverso, como muestran lossiguientes ejemplos:
cos( 120° ) = - cos( 60° )cos( α° ) = - cos( 180° - α° )cos( α ) = - cos( π - α )
Ángulos adyacentes 122
Referencias[1] Principios y ejercicios de geometría. (http:/ / books. google. com/ books?id=jfUC9uW7hhsC& pg=PA12#v=onepage& q& f=false) (Acisclo
Fernández Vallín y Bustillo, 1864) pág. 12.[2] Geometria: El Encanto de la Forma. (http:/ / books. google. com/ books?id=68ZoLKGMvvkC& lpg=PA12& pg=PA12#v=onepage& q&
f=false) pág. 12.[3] Notas de clase. Geometría en el plano y en el espacio. (http:/ / books. google. com/ books?id=Lzk43W4D4uAC& pg=PA32#v=onepage& q&
f=false) (Ana Berenice Guerrero G., Univ. Nacional de Colombia) pág. 32.[4] Toral Gutiérrez, Carlos; Preciado Cisneros, Miguel (2002). Curso de Matemáticas 2º (http:/ / books. google. com/
books?id=QuzRE1z2PI4C& pg=PA209& dq=ángulos+ adyacentes& hl=es& ei=4-34TcD8CsqXtweY7Ny8Cg& sa=X& oi=book_result&ct=result& resnum=3& ved=0CEEQ6AEwAg#v=onepage& q=ángulos adyacentes& f=false). Progreso. p. 209. ISBN 9684362412. .
[5] Landaverde, Jesús (2005). "Curso de Geometría (http:/ / books. google. com/ books?id=CSVgfC9zVvIC& pg=PA21& dq=ángulos+adyacentes& hl=es& ei=n_D4TffFBYmgtweH5tj9CQ& sa=X& oi=book_result& ct=result& resnum=2&ved=0CC4Q6AEwATgU#v=onepage& q=ángulos adyacentes& f=false). Progreso. p. 21. ISBN 9684361157. .
Enlaces externos• Complementary Angles animated demonstration. (http:/ / www. mathopenref. com/ anglecomplementary. html)
With interactive applet• Supplementary Angles animated demonstration. (http:/ / www. mathopenref. com/ anglesupplementary. html)
With interactive applet• Angle definition pages (http:/ / www. mathopenref. com/ tocs/ anglestoc. html) with interactive applets that are
also useful in a classroom setting. Math Open Reference
Ángulos entre paralelasEn geometría euclidiana, los ángulos entre paralelas son los ocho ángulos formados por dos rectas paralelas y unatransversal a ellas. Se clasifican según su congruencia.
Ángulos correspondientes

Ángulos entre paralelas 123
Figura 1: Rectas paralelas m y n, recta transversal t.
Las parejas de ángulos: <1 y <5; <2 y <6;<4 y <8; <3 y <7 se llaman ánguloscorrespondientes, y son congruentes(figura 1).
Ángulos alternos
Alternos externos
Las parejas de ángulos: <1 y <7; <2 y <8 sellaman ángulos alternos externos, y soncongruentes (figura 1).
Alternos internos
Las parejas de ángulos: <4 y <6; <3 y <5 sellaman ángulos alternos internos, y soncongruentes (figura 1).
Ángulos congruentes entre paralelasLos ángulos opuestos por el vértice son congruentes, de modo que, de los ocho ángulos formados entre dos paralelasy una transversal, hay únicamente dos distintos, que son adyacentes (figura 2).
Figura 2: Rectas paralelas a y b, tranversal t, ángulos adyacentes β y θ.

Ángulos entre paralelas 124
Teoremas y resultados relacionadosLa noción de ángulos correspondientes es la base de numerosos ejemplos y teoremas fundamentales de lageometría,[1] presente en los cursos de enseñanza media de las matemáticas.[Ver: Bibliografía] Es un resultadogeométrico intuitivo conocido y manejado desde la antigüedad, de manera tanto práctica como teórica,[2] si bien es laciencia griega, y en particular Euclides, en los Elementos (siglo III a.C.), quienes formalizan los conceptos y lasnociones de un modo que ha permanecido casi sin variaciones hasta nuestros días.
Según cuenta la leyenda, el filósofo Tales de Mileto utilizó esta propiedad para medir laaltura de las pirámides de Guiza, alrededor del año 500 a.C.
Teorema deDesargues.
Teorema de Tales. Triángulos semejantes. Triángulos semejantes.
Proposiciones de EuclidesLa controversia sobre el V postulado alcanza naturalmente la definición de los ángulos entre paralelas, desde elmomento mismo de la elección de la noción de «rectas paralelas»: si aquellas que guardan siempre la mismadistancia; las que no se encuentran; o bien las que forman ángulos congruentes al ser cortadas por una transversal.Manifiestamente, Euclides no utiliza el concepto en sus primeras 26 proposiciones.De los Elementos de Euclides:
Proposición 28
Si un segmento al incidir sobre dos rectas hace el ángulo externo igual al interno y opuesto del mismo lado, o los dos internos del mismolado iguales a dos ángulos rectos, las rectas serán paralelas entre sí.
Proposición 29
Una recta que corta a otras dos rectas paralelas hace los ángulos alternos iguales, los ángulos externos iguales a los interiores y opuestos,y la suma de los ángulos internos por el mismo lado iguales a dos rectos.

Ángulos entre paralelas 125
Definición 23
Rectas paralelas son aquellas que, estando en un mismo plano y siendo prolongadas indefinidamente en ambos sentidos, no se encuentranuna a otra en ninguno de ellos.
Independencia del V postulado
Si los ángulos interiores α y β no son suplementarios, las rectas prolongadas se intersecan(V postulado de Euclides).
Los siguientes dos resultados(lógicamente equivalentes[3]) sonindependientes del V postulado deEuclides. La Proposición 16 porejemplo, no se cumple en geometríaelíptica.
De los Elementos de Euclides:
Proposición 27
Si un segmento al incidir sobre dos rectas hace los ángulos alternos iguales entre sí, las dos rectas serán paralelas.
Proposición 16
En cualquier triángulo, si se alarga uno de los lados, el ángulo exterior es mayor o igual que el ángulo interior y los ángulos opuestos.

Ángulos entre paralelas 126
Geometría no-euclidianaEn la geometría absoluta o la geometría esférica por ejemplo, el quinto postulado de Euclides no aplica, por lo quelos ángulos entre paralelas tienen propiedades diferentes.Contraejemplos
Geometría elíptica.
Geometría hiperbólica.
Disco de Poincaré.
Notas y referencias[1] Ver: Regla y compás.[2] Ver: Historia de la geometría.[3] Heath, T.L., The thirteen books of Euclid's Elements, Vol.1, Dover, 1956, pg.309.
Bibliografía• Quintero, Ana Helvia (1994). Geometría (http:/ / bks1. books. google. com. pr/ books?id=1cQZ-pvFoDsC&
lpg=PP1& hl=es& pg=PP1#v=onepage& q& f=false). UPR. ISBN 0-8477-2345-3.• Guerrero G, Ana Berenice (2006). Geometría: desarrollo axiomático (http:/ / bks1. books. google. com. pr/
books?id=KQPu54kgeKwC& lpg=PP1& hl=es& pg=PP1#v=onepage& q& f=false). ECOE.• Tsijli, Teodora (2006). Geometría Euclídea II (http:/ / bks1. books. google. com. pr/
books?id=P7rgaHKW6EYC& lpg=PP1& hl=es& pg=PR4#v=onepage& q& f=false). EUNED. ISBN 9977-64-830-1.

Ángulos entre paralelas 127
Enlaces externos• Pierce, Rod. « Líneas paralelas y pares de ángulos (http:/ / www. disfrutalasmatematicas. com/ geometria/
lineas-paralelas. html)».• Transversal and its properties (http:/ / www. mathopenref. com/ transversal. html), sitio interactivo, (en inglés).• Elementos (http:/ / www. euclides. org/ menu/ elements_esp/ indiceeuclides. htm) de Euclides.
Teorema de DesarguesEn geometría proyectiva, el teorema deDesargues, llamado así en honor a GérardDesargues expone:
En el plano proyectivo, dos triángulos son perspectivos desde un punto si y sólo si son perspectivos desde una recta.
Considere los triángulos ABC y DEF. El que los triángulos sean perspectivos desde un punto significa que las rectasAD, BE y CF concurren en un mismo punto O. De modo parecido, el que los triángulos sean perspectivos desde unarecta significa que los pares de lados (AB, DE), (BC, EF) y (AC, DF) se cortan respectivamente sobre una mismarecta r.Al punto O se le llama centro de perspectiva y a la recta r, eje de perspectiva.
Demostración del teorema
Para demostrar este teorema, considere los planos p y q secantes en larecta r. Sea AB un segmento sobre el plano q y M la intersección de larecta AB con la recta r. Sean S y T dos puntos exteriores a dichosplanos. Sean C y D las proyecciones sobre el plano p de los puntos A yB desde el punto S y E y F las proyecciones del mismo segmento ABdesde el punto T sobre el plano p.El plano determinado por los puntos SAB corta al plano p sobre larecta CD. El punto M se encuentra sobre el dicho plano, por estar sobrela recta AB y por esta razón M se halla sobre la recta CD. Usando los
mismos argumentos, pero considerando ahora el plano TAB, se demuestra que el punto M es común a las rectas ABy EF. Así, las rectas CD y EF se cortan en el mismo punto M sobre la recta r.Sea O la intersección de la recta ST sobre el plano p. El plano STA corta al plano p sobre la recta CE que contiene alpunto O. De manera similar, el plano STB corta al plano p en la recta DF que también contiene al punto O. Por tanto,

Teorema de Desargues 128
las rectas CE y DF se cortan en dicho punto.De modo que los pares de puntos C, E y D, F son proyectivos desde el punto O. Las rectas CD y EF sonproyectivas desde la recta r.
El recíproco también es cierto: Si las rectas CD y EF en un mismo plano p, son proyectivas desde una recta r y lospuntos correspondientes C, E y D, F son proyectivos desde un punto O en dicho plano, entonces existe un plano q,secante al plano p en r, una recta AB sobre dicho plano y un par de puntos exteriores a ambos planos desde loscuales la recta AB se poryecta sobre CD y EF, el punto A sobre C y E y el punto B sobre D y F.En el teorema de Desargues, podemos considerar los triángulos como las proyecctiones de un único triángulo sobrealgún plano q desde dos puntos distintos S y T. La recta r y el punto O son respectivamente, la intersección del planoq con aquél donde los dos triángulos son perspectivos, y la intersección de la recta ST con aquél plano. Los vérticescorrespondientes en ambos triángulos serán proyectivos desde el punto O y los lados correspondientes de ambostriángulos serán proyectivos desde la recta r. Esto demuestra el teorema
Referencias• Luigi Cremona, Elements of Projective Geometry third edition, Dover 2005 ISBN 0-486-44266-7
Geometría proyectiva (Matemáticas)Se llama geometría proyectiva a la rama de la matemática que estudia las propiedades de incidencia de las figurasgeométricas, pero abstrayéndose totalmente del concepto de medida. A menudo se usa esta palabra también parahablar de la teoría de la proyección llamada geometría descriptiva.
Dibujo en perspectiva. La luz pasa a partir de la mirada del espectador a unobjeto. En caso de que la luz llega al plano de la imagen, el objeto se dibuja.
La perspectiva trata de emular esto.
Breve reseña histórica
Gérard Desargues es el iniciador de la geometríaproyectiva, pues fundamentó matemáticamentelos métodos de la perspectiva que habíandesarrollado los artistas del Renacimiento, yaunque su trabajo fue publicado en 1639, pasódesapercibido durante dos siglos (excepto dosteoremas), ensombrecido por la influyente obrade Descartes.
En el siglo XIX, la geometría proyectiva y lageometría hiperbólica, se establecieron dentro de las matemáticas, pero lo que acabó de enraizarlas, posiblemente,fue hallar un modelo analítico. Dentro del contexto de la geometría euclidiana-cartesiana se puede construir lageometría proyectiva, y si se acepta la primera, hay que admitir la segunda.
Este proceso finalizó definitivamente a principios del siglo XX, pues Einstein, apoyándose en los exhaustivosdesarrollos geométricos de los matemáticos del siglo XIX, consiguió demostrar que, a gran escala, el universo sepuede interpretar mejor con estas nuevas geometrías que con el rígido espacio euclidiano.

Geometría proyectiva (Matemáticas) 129
Punto de vista sintéticoDesde el punto de vista sintético, la geometría proyectiva es una geometría que parte de los siguientes principios:• Dos puntos definen una recta.• Todo par de rectas se cortan en un punto (cuando dos rectas son paralelas decimos que se cortan en un punto del
infinito conocido como punto impropio).El quinto postulado de Euclides, de las paralelas, está implícito en estos dos principios ya que, dada una recta y unpunto exterior, existirá una única paralela (el punto dado y el del infinito definen la paralela por el primer axioma.Nótese que en la geometría proyectiva, dos rectas paralelas por definición comparten un punto y esto no excluye quesean isomorfas con las paralelas euclídeas).Como los axiomas de los que se parte son simétricos, si en cualquier teorema proyectivo se intercambian las palabrasrecta y punto se obtiene otro teorema igualmente válido. A estos teoremas se les llama duales.El principio antes expuesto se conoce como Principio de Dualidad y fue enunciado por Poncelet en el siglo XIX.Muchos teoremas anteriores, como los de Pascal y Brianchon, son duales, aunque ningún matemático lo habíanotado hasta entonces.Los teoremas de Pascal y Brianchon, aunque completamente válidos, se demostraron inicialmente en geometríaeuclidiana, basándose en los teoremas de Pappus y Menelao, que utilizan una métrica y por tanto no son válidos engeometrías de incidencia, como la proyectiva.En principio se intentó buscar demostraciones alternativas de estos teoremas sin usar congruencia de segmentos.Hilbert demostró en 1899 que tal cosa es imposible y desde entonces suele incluirse el teorema del hexágono dePappus como un axioma de la geometría proyectiva. Ello permite demostrar en proyectiva todo lo demostrable eneuclídea sin tener que recurrir a una métrica.Por no usar métricas en sus enunciados, se dice que la geometría proyectiva es una Geometría de incidencia.Finalmente, hay que destacar que desde el punto de vista sintético, un espacio proyectivo consiste en un espacio afínal que hemos añadido un conjunto de puntos infinitos, de modo que cada par de rectas paralelas se cortan en uno deestos puntos.[1][2][3]
AplicacionesCuando hacemos isomorfas nuestras paralelas euclídeas con las rectas proyectivas que se cortan “en el infinito”,podemos extrapolar todo lo que demostremos en proyectiva a geometría euclidiana. La geometría proyectiva, másflexible que la euclidiana, se convierte con esto en una herramienta útil para enunciar muchos teoremas clásicos mássencillamente, e incluso simplificar las demostraciones, aunque no permite demostrar nada que no puedademostrarse en euclidiana.La geometría proyectiva puede entenderse, informalmente, como la geometría que se obtiene cuando noscolocamos en un punto, mirando desde ese punto. Esto es, cualquier línea que incide en nuestro "ojo" nos parece sersólo un punto, en el Plano proyectivo, ya que el ojo no puede "ver" los puntos que hay detrás.De esta forma, la geometría proyectiva también equivale a la proyección sobre un plano de un subconjunto delespacio en la geometría euclidiana tridimensional. Las rectas que salen del ojo del observador se proyectan sobrepuntos. Los planos definidos por cada par de ellas se proyectan sobre rectas.Esto es útil porque a veces los teoremas de geometría proyectiva no pueden demostrarse sólo con los axiomas deincidencia antes expuestos (Hilbert, 1899) y es necesario demostrarlos en geometría euclidiana y luego proyectar,como el Teorema de Desargues (o bien admitir el teorema de Papus anteriormente citado como axioma).

Geometría proyectiva (Matemáticas) 130
Punto de vista vectorialLa geometría proyectiva es el estudio del grupo de las proyectividades entre espacios proyectivos.Sea un cuerpo y un -espacio vectorial (no trivial). Las rectas vectoriales de son aquellos conjuntosformados por los múltiplos escalares de los vectores no nulos, esto es, si , , la recta vectorialdeterminada por es el conjunto . La recta vectorial determinada por no es entoncesotra cosa que el espacio generado por , es decir, . El espacio proyectivo asociado a será elconjunto de todas las rectas vectoriales de .Es inmediato que si , , entonces para cualquier tal que con , se cumpleque las rectas vectoriales determinadas por y por coinciden, esto es, = .Ahí reside la esencia de un espacio proyectivo: consideramos sólo las direcciones, no los vectores concretos. Anteeste hecho, para trabajar sólo con vectores y no con rectas vectoriales, se establece la siguiente relación, que resultaser una relación de equivalencia: si , diremos que está relacionado con (lo escribiremoscomo ) si existe un de manera que . Al tomar el conjunto cociente se obtiene otraforma de definir .Los elementos del espacio proyectivo serían entonces las clases de equivalencia de los vectores de mediante larelación de equivalencia. Aun puede darse otro paso más para comprender mejor éste tipo de espacios: si tomamos una base de , como altomar la recta vectorial generada por exigimos que , alguna las coordenadas de respecto de la basetomada ha de ser necesariamente no nula. Al multiplicar escalarmente el vector nulo por el inverso de esacoordenada no nula obtendremos otro vector de la misma recta vectorial, en el que ahora la coordenada no nulaelegida va a valer 1. Como el nuevo vector está en la misma recta vectorial, su clase de equivalencia es la misma quela del vector antiguo, es decir, representa al mismo elemento del espacio proyectivo.Veamos en un ejemplo qué significa esto: Tomemos el espacio vectorial real (con la base canónica) y el vectorno nulo . Denotaremos por a su clase de equivalencia mediante la
relación . Cuatro de las cinco coordenadas son no nulas, así que tenemos cuatro posibles maneras de realizar elproceso anterior: en el primer caso (dividiendo entre la primera coordenada, el 8) obtendríamos
. Si en lugar de tomar la primera coordenada tomamos, por ejemplo, la quinta ( ),
obtendríamos . Podríamos dividir las coordenadas del vector inicial
entre las otras dos coordenadas no nulas, o , pero en todos los casos obtendríamos la
misma clase de equivalencia, aunque las coordenadas no sean, numéricamente las mismas. En esta situación se diráque es la representación de la clase del vector en coordenadas
homogéneas. Ha de quedar claro que , y
son coordenadas homogéneas del mismo punto proyectivo.

Geometría proyectiva (Matemáticas) 131
Referencias[1] "Geometría descriptiva superior y aplicada", por Fernando Izquierdo Asensi.[2] "Curso de geometría métrica", por Pedro Puig Adam.[3] "Geometría proyectiva", por Frank Ayres.
Fuentes• Libros de geometría (Carlos Ivorra) (http:/ / www. uv. es/ ~ivorra/ Libros/ Libros. htm)• Exposición sobre geometría proyectiva (http:/ / ochoa. mat. ucm. es/ ~jesusr/ expogp/ expogp. html)• El principio de dualidad: los teoremas de Pascal y Brianchon (http:/ / www. epsilones. com/ paginas/ t-historias2.
html)• Una Reflexión sobre los Conceptos Básicos de la Geometría Proyectiva - Pablo Perdomo Rivero (http:/ /
personales. ya. com/ casanchi/ ref/ proyec01. htm)• Reseña sobre Poncelet (http:/ / www. geocities. com/ grandesmatematicos/ cap13. html)
Enlaces externos• Wikimedia Commons alberga contenido multimedia sobre Geometría proyectiva (Matemáticas). Commons
Teorema de Tales
Thales de Mileto.
Existen dos teoremas en relación a la geometría clásica que reciben elnombre de Teorema de Thales, ambos atribuidos al matemáticogriego Thales de Mileto en el siglo VI a. C.

Teorema de Tales 132
Los dos teoremas de Tales
Semicírculo que ilustra un teorema de Thales.
El primero de ellos explica esencialmente una forma de construir untriángulo semejante a uno previamente existente (los triángulossemejantes son los que tienen iguales ángulos). Mientras que elsegundo desentraña una propiedad esencial de los circuncentros detodos los triángulos rectángulos (encontrándose éstos en el puntomedio de su hipotenusa), que a su vez en la construcción geométrica esampliamente utilizado para imponer condiciones de construcción deángulos rectos. Si tres o más rectas paralelas son intersecadas cada unapor dos transversales, los segmentos de las transversales determinadospor las paralelas, son proporcionales.
Primer teorema
Una aplicación del Teorema de Thales.
Como definición previa al enunciado del teorema, es necesarioestablecer que dos triángulos son semejantes si tienen los ánguloscorrespondientes iguales y sus lados son proporcionales entre si. Elprimer teorema de Tales recoge uno de los resultados más básicos de lageometría, a saber, que:
Teorema primero
Si por un triángulo se traza una línea paralela a cualquiera de sus lados, se obtienen dos triángulos semejantes.
Tales de Mileto
Según parece, Tales descubrió el teorema mientras investigaba la condición de paralelismo entre dos rectas. Dehecho, el primer teorema de Tales puede enunciarse como que la igualdad de los cocientes de los lados de dostriángulos no es condición suficiente de paralelismo. Sin embargo, la principal aplicación del teorema, y la razón desu fama, se deriva del establecimiento de la condición de semejanza de triángulos, a raíz de la cual se obtiene elsiguiente corolario.

Teorema de Tales 133
CorolarioDel establecimiento de la existencia de una relación de semejanza entre ambos triángulos se deduce la necesariaproporcionalidad entre sus lados. Ello significa que la razón entre la longitud de dos de ellos en un triángulo semantiene constante en el otro.Por ejemplo, en la figura se observan dos triángulos que, en virtud del teorema de Thales, son semejantes. Entonces,del mismo se deduce a modo de corolario que el cociente entre los lados A y B del triángulo pequeño es el mismoque el cociente entre los lados D y C en el triángulo grande. Esto es, que como por el teorema de Tales ambostriángulos son semejantes, se cumple que:
Este corolario es la base de la geometría descriptiva. Su utilidad es evidente; según Heródoto, el propio Thalesempleó el corolario de su teorema para medir la altura de la pirámide de Keops en Egipto. En cualquier caso, elteorema demuestra la semejanza entre dos triángulos, no la constancia del cociente.Del primer teorema de Thales se deduce además lo siguiente (realmente es otra variante de dicho teorema, y, a suvez, consecuencia del mismo): Si las rectas a, b, c son paralelas y cortan a otras dos rectas r y s, entonces lossegmentos que determinan en ellas son proporcionales.Una aplicación inmediata de este teorema sería la división de un segmento en partes iguales, o en partesproporcionales a números dados (con ayuda de compás, regla y escuadra o cartabón).
Segundo teorema
fig 2.1 Ilustración del enunciado del segundo teoremade Tales de Mileto.
El segundo teorema de Tales de Mileto es un teorema degeometría particularmente enfocado a los triángulos rectángulos,las circunferencias y los ángulos inscritos, consiste en el siguienteenunciado:
Teorema segundo
Sea B un punto de la circunferencia de diámetro AC, distinto de A y de C. Entonces el ángulo ABC, es recto.
Tales de Mileto
Este teorema (véase fig 2.1 y 2.2), es un caso particular de una propiedad de los puntos cocíclicos y de la aplicaciónde los ángulos inscritos dentro de una circunferencia.

Teorema de Tales 134
Demostración
fig 2.2 Siempre que AC sea un diámetro, el ángulo B será constante y recto.
fig 2.3 Los triángulos AOB y BOC son isósceles.En la circunferencia de centro O y radio r (véase fig 2.3), los segmentos
OA , OB y OC
son iguales por ser todos radios de la misma circunferencia.Por lo tanto los triángulos AOB y BOC son isósceles.La suma de los ángulos del triángulo ABC es:
Dividiendo ambos miembros de la ecuación anterior por dos, se obtiene:
Con la expresión anterior el segundo teorema queda demostrado.
Corolarios
(Corolario 1) “En todo triángulo rectángulo la longitud de la mediana correspondiente a la hipotenusa es siempre ½ de lahipotenusa.”
Ya que aplicando el teorema anterior, se sabe que para cualquier posición que adopte el vértice B vale la igualdad,OA = OB = OC = r, donde OB es la mediana de la hipotenusa, (véase fig 2.3).
(Corolario 2) “La circunferencia circunscripta a todo triángulo rectángulo siempre tiene radio igual a ½ de la hipotenusa y sucircuncentro se ubicará en el punto medio de la misma.”
El corolario 2 también surge de aplicar el teorema anterior, para una comprensión intuitiva basta observar la fig 2.2.

Teorema de Tales 135
Aplicación (Tales - teorema segundo)
Construcción de tangentes (líneas rojas) a una circunferencia k desde un punto P,utilizando el «segundo teorema de Tales».
El “segundo teorema” (de Tales deMileto) puede ser aplicado para trazarlas tangentes a una circunferencia kdada, que además pasen por un puntoP conocido y externo a la misma(véase figura ).
Se supondrá que una tangentecualquiera t (por ahora desconocida)toca a la circunferencia k en un puntoT (también desconocido por ahora). Sesabe por simetría que cualquier radio rde la circunferencia k es perpendiculara la tangente del punto T que dichoradio define en la misma, por lo queconcluimos que ángulo OTP esnecesariamente recto.
Lo anterior implica que el triángulo OTP es rectángulo. Recordando el «corolario 2 del teorema segundo de Tales»podemos deducir que entonces el triángulo OTP es inscribible en una circunferencia de radio ½ de la hipotenusa OPdel mismo.
Entonces marcando el punto H como punto medio de la hipotenusa OP y haciendo centro en el mismo, podemosdibujar una segunda circunferencia auxiliar (gris en la figura) que será la que circunscribe al triángulo OTP.Esta última circunferencia trazada se intersecará con la circunferencia k en dos puntos T y 'T', estos son justamentelos puntos de tangencia de las dos rectas que son simultáneamente tangentes a k y además pasan por el punto P,ahora ya conocidos los puntos T y T' solo basta trazar las rectas TP y T'P (rojas en la figura) para tener resuelto elproblema.
LeyendaSegún la leyenda (relatada por Plutarco[1]), Tales de Mileto en un viaje a Egipto, visitó las pirámides de Guiza(conocidas como Keops, Kefrén y Micerino), construidas varios siglos antes. Admirado ante tan portentososmonumentos de esta civilización, quiso saber su altura. De acuerdo a la leyenda, trató este problema con semejanzade triángulos (y bajo la suposición de que los rayos solares incidentes eran paralelos), pudo establecer una relaciónde semejanza (teorema primero de Tales) entre dos triángulos rectángulos, por un lado el que tiene por catetos (C yD) a la longitud de la sombra de la pirámide (conocible) y la longitud de su altura (desconocida), y por otro lado,valiéndose de una vara (clavada en el suelo de modo perfectamente vertical) cuyos catetos conocibles (A y B) son, lalongitud de la vara y la longitud de su sombra. Realizando las mediciones en una hora del día en que la sombra de lavara sea perpendicular a la base de la cara desde la cual medía la sombra de la pirámide y agregando a su sombra lamitad de la longitud de una de las caras, obtenía la longitud total C de la sombra de la pirámide hasta el centro de lamisma.

Teorema de Tales 136
Como en triángulos semejantes, se cumple que , por lo tanto la altura de la pirámide es , con
lo cual resolvió el problema.
En la cultura popularEl grupo humorístico-musical argentino Les Luthiers compuso el tema "Teorema de Thales", incluído en el discoSonamos, pese a todo. En dicho tema se enuncia el teorema en su totalidad, junto con su hipótesis.
Notas y referencias[1] Convivio dei Sette Sapienti (2, 147 A)
Enlaces externos• Schreiber. Michael. « Thales' Theorem (http:/ / demonstrations. wolfram. com/ ThalesTheorem/ )» (en inglés).
The Wolfram Demonstrations Project. Wolfram Research.• Weisstein, Eric W. « Thales' Theorem (http:/ / mathworld. wolfram. com/ ThalesTheorem. html)» (en inglés).
MathWorld. Wolfram Research.• Munching on Inscribed Angles (http:/ / www. cut-the-knot. org/ pythagoras/ Munching/ inscribed. shtml)• Thales' theorem explained (http:/ / www. mathopenref. com/ thalestheorem. html) With interactive animation• Aplicaciones del Teorema de Tales (http:/ / portales. educared. net/ wikiEducared/ index.
php?title=Aplicaciones_del_teorema_de_Tales)

Geometría absoluta 137
Geometría absolutaSe llama geometría absoluta al sistema axiomático que depende de los primeros cuatro postulados de Euclides, y nodel quinto postulado, es decir, el de las rectas paralelas. Engloba, por tanto, la parte común de la geometría euclídeay la hiperbólica; Euclides mismo la utiliza en los Elementos en las primeras proposiciones.Las geometrías elípticas y en particular, la esférica, están fuera de la geometría absoluta, ya que violan el postuladode que dos rectas se corten sólo en un punto. El término geometría absoluta fue introducido por Bolyai en 1832.
Referencias• «Encyclopaedia of Mathematics - ISBN 1402006098 [1]».• Weisstein, Eric W. "Absolute Geometry." From MathWorld--A Wolfram Web Resource. http:/ / mathworld.
wolfram. com/ AbsoluteGeometry. html
Enlaces externos• Intentos de demostración del quinto postulado [2]
Referencias[1] http:/ / eom. springer. de/ a/ a010320. htm[2] http:/ / www. xtec. es/ ~jdomen28/ aarticle2. htm
János Bolyai
János Bolyai.
János Bolyai fue un matemático húngaro, nacido el 15 de diciembredel año 1802 en Kolozsvár (actual Rumania), que en ese entonces eraparte del Imperio Austro-Húngaro. Su padre, Farkas Bolyai, tambiénera matemático y amigo de Carl Friedrich Gauss.
A los 13 años ya dominaba el cálculo. Entre 1818 y 1822 estudió en elColegio Real de Ingeniería en Viena. En 1832 publicó un completotratado sobre geometría no euclídea, sin conocer a NikoláiLobachevski, que tres años antes había publicado un estudio similar,por lo que sus logros matemáticos no fueron merecidamentereconocidos. Su padre le había enviado una carta a Carl Gauss para queeste lo tomara como discípulo, pero este se negó, aduciendo que suslogros los había concebido diez años atrás, pero que no los habíapublicado. Aunque en cartas a otros matemáticos reconoce suprominente genio. Ello desanimó irremediablemente a János Bolyai ynunca continuó su carrera como matemático.
Perteneció al cuerpo de oficiales-ingenieros de la armada austríaca durante 11 años, donde se destacó por su grancapacidad lingüística, que le permitió hablar hasta nueve idiomas extranjeros (incluido el chino) y por sus cualidadesde violinista, bailarín y esgrimista.En 1843, aquejado de fiebres, tuvo que jubilarse de su carrera militar. Desde entonces se dedicó a la investigaciónmatemática. Murió de neumonía, el 27 de enero de 1860 en Marosvásárhely, Hungría.
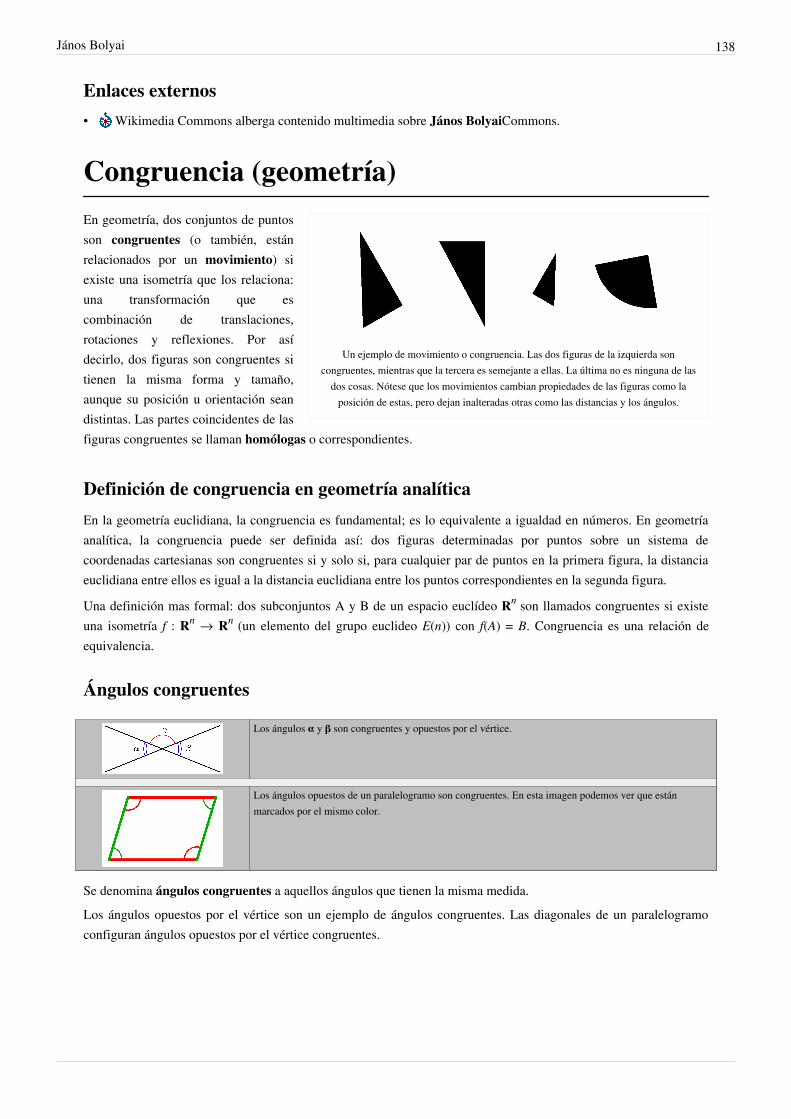
János Bolyai 138
Enlaces externos• Wikimedia Commons alberga contenido multimedia sobre János BolyaiCommons.
Congruencia (geometría)
Un ejemplo de movimiento o congruencia. Las dos figuras de la izquierda soncongruentes, mientras que la tercera es semejante a ellas. La última no es ninguna de las
dos cosas. Nótese que los movimientos cambian propiedades de las figuras como laposición de estas, pero dejan inalteradas otras como las distancias y los ángulos.
En geometría, dos conjuntos de puntosson congruentes (o también, estánrelacionados por un movimiento) siexiste una isometría que los relaciona:una transformación que escombinación de translaciones,rotaciones y reflexiones. Por asídecirlo, dos figuras son congruentes sitienen la misma forma y tamaño,aunque su posición u orientación seandistintas. Las partes coincidentes de lasfiguras congruentes se llaman homólogas o correspondientes.
Definición de congruencia en geometría analítica
En la geometría euclidiana, la congruencia es fundamental; es lo equivalente a igualdad en números. En geometríaanalítica, la congruencia puede ser definida así: dos figuras determinadas por puntos sobre un sistema decoordenadas cartesianas son congruentes si y solo si, para cualquier par de puntos en la primera figura, la distanciaeuclidiana entre ellos es igual a la distancia euclidiana entre los puntos correspondientes en la segunda figura.
Una definición mas formal: dos subconjuntos A y B de un espacio euclídeo Rn son llamados congruentes si existeuna isometría f : Rn → Rn (un elemento del grupo euclideo E(n)) con f(A) = B. Congruencia es una relación deequivalencia.
Ángulos congruentes
Los ángulos α y β son congruentes y opuestos por el vértice.
Los ángulos opuestos de un paralelogramo son congruentes. En esta imagen podemos ver que estánmarcados por el mismo color.
Se denomina ángulos congruentes a aquellos ángulos que tienen la misma medida.Los ángulos opuestos por el vértice son un ejemplo de ángulos congruentes. Las diagonales de un paralelogramoconfiguran ángulos opuestos por el vértice congruentes.
Congruencia (geometría) 139
Congruencia de triángulosLa congruencia de triángulos estudia los casos en que dos o más triángulos presentan ángulos y lados de igualmedida o congruentes.Dos triángulos son congruentes si sus lados correspondientes tienen la misma longitud y sus ánguloscorrespondientes tienen la misma medida.Si el triángulo ABC es congruente al triángulo DEF, la relación puede ser escrita matemáticamente así:
En muchos casos es suficiente establecer la igualdad entre tres partes correspondientes y usar uno de los siguientescriterios para deducir la congruencia de dos triángulos.
Criterios de congruencia de triángulosLas condiciones mínimas que deben cumplir dos triángulos para que sean congruentes se denominan criterios decongruencia, los cuales son:• Criterio LLL: Si en dos triángulos los tres lados de uno son respectivamente congruentes con los del otro,
entonces los triángulos son congruentes.• Criterio LAL: Si los lados que forman un ángulo, y éste, son congruentes con dos lados y el ángulo comprendido
por estos de otro triángulo, entonces los triángulos son congruentes.• Criterio ALA: Si dos ángulos y el lado entre ellos son respectivamente congruentes con los mismos de otro
triángulo, entonces los triángulos son congruentes.• Criterio LLA Dos triángulos son congruentes si tienen respectivamente iguales dos lados y el ángulo opuesto al
mayor de ellos.
Referencias• Este artículo fue creado a partir de la traducción del artículo Congruence (geometry) de la Wikipedia en inglés,
concretamente de (geometry) esta versión (http:/ / en. wikipedia. org/ wiki/ Congruence), bajo la licenciaCreative Commons Atribución Compartir Igual 3.0 Unported y la licencia de documentación libre de GNU.
Enlaces externos• Wikimedia Commons alberga contenido multimedia sobre Congruencia (geometría). Commons• http:/ / www. uv. es/ ivorra/ Libros/ Geometria. pdf• The SSS (http:/ / www. cut-the-knot. org/ pythagoras/ SSS. shtml) en Cut-the-Knot• The SSA (http:/ / www. cut-the-knot. org/ pythagoras/ SSA. shtml) en Cut-the-Knot

Ángulos complementarios 140
Ángulos complementarios
Los ángulos α y β son complementarios.
Los ángulos complementarios son aquellos ángulos cuyas medidassuman 90º (grados sexagesimales). Si dos ángulos complementarios sonconsecutivos, los lados no comunes de los dos forman un ángulo recto.
Así, para obtener el ángulo complementario de α, teniendo α unaamplitud de 70°, se restará α de 90°:
β = 90° –70º = 20º
el ángulo β (beta) es el complementario de α (alfa).Sabiendo esto, dichos ángulos formarán siempre un triángulo rectángulopuesto que los ángulos en un triángulo rectángulo son uno de 90º y los otros dos deben sumar 90 con el del catetoadyacente y se multiplica por la hipotenusa (180º(grados totales de un triángulo)-90º=90º). Por tanto, el seno de α esigual al coseno de β y el seno de β igual al coseno de α puesto que pertenecen al mismo triángulo rectángulo.
La diagonal de un rectángulo también configura ángulos complementarios con los lados adyacentes.
Enlaces externos• Wikimedia Commons alberga contenido multimedia sobre Ángulos complementarios. Commons
Ángulos suplementarios
Ángulos suplementarios.
Dos ángulos suplementarios son aquellos cuya suma de medidas es180° (grados sexagesimales).
Así, para obtener el ángulo suplementario β de un determinado ánguloα comprendido entre [0,180º], se restará α a 180°, de manera que:
β = 180° – αEn otras unidades de medida del ángulo plano, 180 gradossexagesimales equivalen a π radianes, o 200 grados centesimales y 360grados sexagesimales equivalen a 2π radianes, o 400 grados centesimales.
Propiedades• Si dos ángulos son suplementarios de otros dos ángulos congruentes, también son congruentes entre sí.• Los senos de los angulos suplementarios son los mismos, por ejemplo:
sin( α° ) = sin( 180° - α° )sin( α ) = sin( π - α )sin( 120° ) = sin( 60° )
• Los cosenos de los ángulos suplementarios son de igual valor absoluto, pero de signo inverso, como muestran lossiguientes ejemplos:
cos( α° ) = - cos( 180° - α° )cos( α ) = - cos( π - α )cos( 120° ) = - cos( 60° ')
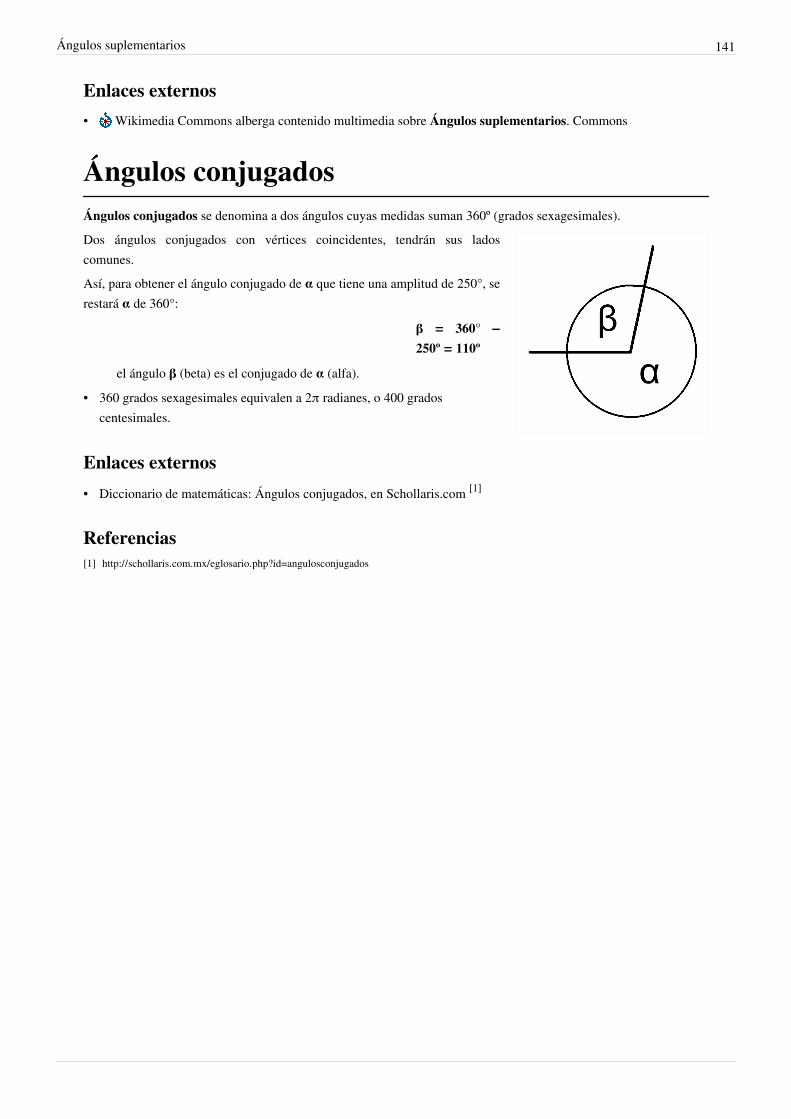
Ángulos suplementarios 141
Enlaces externos• Wikimedia Commons alberga contenido multimedia sobre Ángulos suplementarios. Commons
Ángulos conjugadosÁngulos conjugados se denomina a dos ángulos cuyas medidas suman 360º (grados sexagesimales).Dos ángulos conjugados con vértices coincidentes, tendrán sus ladoscomunes.Así, para obtener el ángulo conjugado de α que tiene una amplitud de 250°, serestará α de 360°:
β = 360° –250º = 110º
el ángulo β (beta) es el conjugado de α (alfa).• 360 grados sexagesimales equivalen a 2π radianes, o 400 grados
centesimales.
Enlaces externos
• Diccionario de matemáticas: Ángulos conjugados, en Schollaris.com [1]
Referencias[1] http:/ / schollaris. com. mx/ eglosario. php?id=angulosconjugados

Ángulos consecutivos 142
Ángulos consecutivos
Ángulos consecutivos.
Los ángulos consecutivos son aquellos que poseen un mismo vértice ytienen un lado común.
Son ángulos consecutivos los conjugados y los adyacentes.
Enlaces externos
• Ángulos consecutivos, en escolar.com [1]
Referencias[1] http:/ / www. escolar. com/ avanzado/ geometria006. htm
TranslaciónEn lingüística, una translación (también llamada transcategorización o metábasis) es el paso de una categoríagramatical a otra.
Sustantivación (nominalización)La sustantivación o nominalización ocurre cuando un adjetivo o un verbo pasan a convertirse en un sustantivo.Existen dos posibles formas:• Anteponiendo un determinante (el, la, los, las, lo) a un adjetivo calificativo. Este determinante se denominará
transcategorizador, ya que convierte el adjetivo en un sustantivo.Ejemplo:
Lo bueno. (Sustantivación, transcategorización del adjetivo bueno a un sustantivo. Lo será untranscategorizador que provoca esta conversión)
• Utilizando un verbo en infinitivo.Ejemplo:
Fumar es peligroso. (Sustantivación del verbo fumar. Oración sustantiva de sujeto.)
Translación 143
AdjetivaciónCuando un verbo en participio se transforma en un adjetivo.
Ejemplo:Banco roto. (Adjetivación del verbo roto, se utiliza como adjetivo para describir el banco).
AdverbializaciónConversión de una categoría gramatical a un adverbio:•• Añadiendo a un adjetivo calificativo (si es posible, en género femenino) el sufijo -mente.
Ejemplo:buenamente. (Adverbialización del adjetivo bueno)
•• Utilizando un verbo en gerundio (el cual siempre será Complemento Circunstancial de Modo (CCM))Ejemplo:
Bajaron ayer por las escaleras cantando. (Adverbialización del verbo cantar)
IsometríaUna isometría es una aplicación matemática entre dos espacios métricos que conserva las distancias entre lospuntos.
DefiniciónFormalmente si E1 y E2 son dos espacios métricos una isometría φ viene definida por lo siguiente:
Siendo d1(·,·) y d2(·,·) las respectivas funciones de distancia en los dos espacios métricos E1 y E2.
Ejemplos• Una rotación en el espacio euclídeo es una isometría del espacio euclídeo tridimensional.• El operador de evolución temporal , que describe el movimiento de un sólido rígido S es un grupo
uniparamétrico de isometrías del espacio euclídeo tridimensional.• Cada operador unitario que da la evolución de un sistema cuántico cuyo hamiltoniano es
es una isometría sobre un espacio de Hilbert de dimensión infinita.
Grupo de isometríaEl conjunto de todas las aplicaciones que son isometrías de un conjunto contenido en un espacio métrico forma ungrupo conocido como grupo de isometría del conjunto. En un espacio euclídeo de dimensión n el grupo deisometría de cualquier conjunto es un subgrupo del grupo producto formado a partir del grupo ortogonal y elgrupo de traslaciones:

Grupo uniparamétrico 144
Grupo uniparamétricoEn matemáticas, un grupo uniparamétrico o subgrupo uniparamétrico es un subconjunto de un grupo de Lie dedimensión uno. De hecho un grupo uniparamétrico puede ser representado por una colección
de "operadores" o elementos de un grupo , que vienen dados por unhomomorfismo local de grupo continuo , de la recta real , considerada como grupo aditivo) a otrogrupo topológico G. Un homomorfismo local como el anterior se define por las siguientes condiciones:1.2.
Grupo uniparamétrico globalCuando la aplicación que define el subgrupo se puede extender a toda la recta real, es decir, cuando en la definiciónanterior puede extenderse de modo que , entonces la extensión de es un homeomorfismo ordinario yentonces el grupo uniparamétrico no sólo es un subconjunto de un grupo continuo de dimensión uno, sino que toda lacolección es en sí misma un grupo continuo unidimensional.Un grupo uniparamétrico global puede ser identificado con un grupo de Lie unidimensional.
EjemploLa aplicación dada por:
Donde denota el conjunto de números complejos de módulo unidad, que topológicamente puede serinterpetado como el círculo unidad del plano euclídeo; constituye un grupo uniparamétrico local, no trivial y laaplicación es un epimorfismo de grupos. En este caso el grupo paramétrico unidimensional es además un grupode Lie.
Grupos uniparamétricos localesEn matemáticas y sobre todo en física surge la necesidad de considerar grupos de simetría alrededor del operadoridentidad en ese caso usamos morfismos locales que no necesariamente pueden extenderse a morfismosglobales.
Grupos uniparamétricos en grupos de LieUn caso especialmente extraño son los grupos uniparamétricos son aquellos que aún siendo grupos unidimensionalesson densos en un grupo de Lie de dimensión mayor que uno. En ese caso surge la complicación técnica es que
como suespacio de tiene una topología más gruesa que la de la recta real ordinaria, al ser inyectivo.Un ejemplo de esto es la aplicación de la recta real sobre el toro:
Donde es un número irracional. El grupo uniparamétrico identificado con el conjunto imagen de la aplicaciónanterior se enrosca y se enrosca sobre el toro indefinidamente sin intersecarse a sí mismo formando un conjuntodenso en el toro que se distingue del toro por tres razones:•• Tiene una parametrización definida,•• El homomorfismo de grupos puede no ser inyectivo, y•• La topología inducida puede no ser la estándar de la recta real.
Grupo uniparamétrico 145
Grupos uniparamétricos en físicaPuede probarse que el conjunto de grupos uniparamétricos locales que mantienen la simetría o invariancia de uncierto problema físico está generado por un elemento de un álgebra de Lie.
Teorema de NoetherEl teorema de Noether permite construir integrales de movimiento o leyes de conservación a partir de elementos delálgebra de Lie que genera todos los grupos uniparamétricos que son simetrías locales del problema físico.
Operadores unitarios en mecánica cuánticaTales grupos uniparamétricos son de importancia básica en la teoría de los grupos de Lie, para quienes cadaelemento del álgebra de Lie asociada define tal homomorfismo, la función exponencial. En el caso de gruposmatriciales viene dado por la exponencial de matrices.Otro caso importante se ve en el análisis funcional, con G siendo el grupo de los operadores unitarios en un espaciode Hilbert.
Grupo abelianoDada una estructura algebraica sobre un conjunto A, y con una operación o ley de composición interna binaria: " ". Se dice que la estructura es un Grupo abeliano con respecto a la operación si:
1. tiene estructura algebraica Grupo2. tiene la Propiedad conmutativaLos grupos abelianos son así llamados en honor al matemático noruego Niels Henrik Abel. Los grupos que no sonconmutativos se denominan no abelianos (también no conmutativos, con menos frecuencia).
NotaciónHay dos notaciones principales para los grupos abelianos: aditiva y multiplicativa, descritas a continuación.
Notación Operación Elemento neutro Potencias Elementos inversos Suma directa / producto directo
Adición a + b 0 na −a G ⊕ H
Multiplicación a * b o ab e o 1 an a−1 o 1/a G × H
La notación multiplicativa no es otra que la notación usual para los grupos, mientras que la aditiva es la notaciónusual para módulos. Cuando se trabaja sólo con grupos abelianos, usualmente se usa la notación aditiva.

Grupo abeliano 146
EjemplosTodo grupo cíclico G es abeliano, pues si x, y ∈ G = <a>, x = am y y = an para algunos m, n enteros, con lo cual, xy =aman = am + n = an + m = anam = yx. En particular, el grupo Z de enteros bajo la suma es abeliano, al igual que elgrupo de enteros módulo n, Zn.Los números reales forman un grupo abeliano con la adición, al igual que los reales no nulos con la multiplicación.Todo anillo es un grupo abeliano con respecto a su adición. En un anillo conmutativo, los elementos invertiblesforman un grupo abeliano bajo la multiplicación.Todo subgrupo de un grupo abeliano es normal, y por lo tanto, para todo subgrupo hay un grupo cociente.Subgrupos, grupos cocientes, y sumas directas de grupos abelianos son también abelianos.
Propiedades• Si n es un número natural y x un elemento de un grupo abeliano G (con notación aditiva), se puede definir nx = x
+ x + ... + x (n sumandos), y (−n)x = −(nx), con lo que G se vuelve un módulo sobre el anillo Z de los enteros. Dehecho, los módulos sobre Z no son otros que los grupos abelianos.
• Si f, g : G → H son dos homomorfismos entre grupos abelianos, su suma (definida por (f + g)(x) = f(x) + g(x)) estambién un homomorfismo; esto no se cumple en general para grupos no abelianos. Con esta operación, elconjunto de homomorfismos entre G y H se vuelve, entonces, un grupo abeliano en sí mismo.
Espacio recubridor
Y es un cubriente de X.
En topología, un espacio recubridor o espacio cubriente es unatripleta donde son espacios topológicos y
es una función continua y sobreyectivaAdemás se cumple que abierto en vecindad de tal que
donde para cada la aplicación es un
homeomorfismo.El concepto de espacio cubriente se utiliza en ciencias tales como lageometría diferencial, los grupos de Lie, superficies de Riemann,homotopía, teoría de nudos.
El ejemplo prototipo es dado por .
Recubridor universal
Entre todos los espacios recubridores de un espacio se llama recubridor universal al espacio recubridorsimplemente conexo más pequeño[cita requerida] posible. Puede probarse que espacio recubridor es único salvohomeomorfismos. En otras palabras un espacio cubriente se llama universal si es simplemente conexo, i.e. su primergrupo de homotopía es trivial.

Espacio recubridor 147
Referencias• W.S. Massey. Introducción a la topología algebraica. Ed. Reverté, S.A. 1982. ISBN 84-291-5091-9.• C. Kosniowsky. A first course in algebraic topology. Cambridge Univ. Press. 1980. ISBN 0-521-23195-7.
Teoría de nudos
Nudos triviales.
La teoría de nudos es la rama de latopología que se encarga de estudiar elobjeto matemático que abstrae la nocióncotidiana de nudo.
Al escuchar la palabra nudo vienen a nuestramente imágenes como la de los cordones deunos zapatos, la de las sogas de losmarineros e incluso vienen recuerdos comoel de una extensión eléctrica difícil dedesanudar. Todas esas imágenes sonejemplos de nudos que difieren por muypoco del concepto matemático de nudo.Un nudo, una vez pegados sus extremos será representado por una curva simple y cerrada en R3, o de modo másamplio, por encajes o embebimientos (embeddings) de la circunferencia en diversos espacios topológicos ambiente.
DefiniciónLo que pretende la definición matemática de nudo es dar una descripción rigurosa de lo que es el nudo y con ellopoder dar respuesta a qué es lo que hace que un nudo sea distinto de otro. La idea básica de esta definición es que,para darle cabida a que un nudo no se pueda desanudar, se pegan las puntas extremas del nudo.• Por ello se dice que un nudo es un encaje o embebimiento de la circunferencia en el espacio ambiente ( ,
o alguna otra 3-variedad).Por otro lado, el que un nudo se pueda deformar a otro, en matemáticas se describe como la existencia una isotopíadel ambiente entre ambos encajes.• Formalmente hablando, uno puede decir que un nudo en ( o en ) es una clase de equivalencia de encajes
de la 1-esfera ( S1= x R2 : |x|=1 ) en ( o en la 3-esfera). La clase está dada por la equivalencia isotópicade funciones, es decir, dos encajes son equivalentes si existe una isotopía del ambiente entre ambos.
También es posible estudiar nudos en el Toro: .
HistoriaAl final del siglo XVIII hace su aparición la Teoría de nudos con los estudios de A.T.Vandermonde, C.F. Gauss y F.Klein.En la parte final del siglo XIX se inició un estudio sistemático de la teoría cuando los matemáticos y físicos se dedicaron a tabular nudos. Lord Kelvin (1867) propuso la idea de que los átomos eran nudos, formados por pequeños vórtices o corrientes cerradas de éter. Él creía que si clasificaba todos los nudos posibles podría explicar cómo los átomos absorben y emiten luz. Ahora sabemos que esta idea es incorrecta. El físico Peter Tait pasó muchos años realizando una lista de nudos con la creencia de que estaba creando una tabla de elementos. Cuando el eter no fue detectado en el experimento de Michelson y Morley, la teoría de los átomos modelados mediante nudos fue

Teoría de nudos 148
desechada, y la teoría de los nudos perdió parte de su interés para los físicos.Al principio del siglo XX, junto con el desarrollo de la topología, topólogos como Max Dehn, J. W. Alexander, yKurt Reidemeister investigaron los nudos.Pero los desarrollos más importantes de esta teoría se han producido en la segunda parte del siglo XX, gracias a lascontribuciones de J.H.Conway, V.F.R.Jones, L.H. Kauffman y muchos otros. Hoy en día, la teoría de nudos tieneaplicaciones en teoría de cuerdas, en la gravedad cuántica, en el estudio de replicación y recombinación del ADN, enáreas de la mecánica y en psicoanálisis lacaniano (consúltese, por ejemplo, el seminario de Lacan No.22 llamado“RSI”, y el No.23, llamado “Sinthome”, dictados entre 1974 y 1976).Importante recalcar que los complementos de algunos nudos tienen a 3-variedades como complementos y estas sonobjetos de intenso estudio.
Diagramas de nudos y movimientos de Reidemeister
Diagrama de un nudo.
Un nudo se describirá generalmente por medio de su diagrama,que representa su proyección sobre el plano, destacando en cadacruce la diferencia entre el tramo que está encima y el que estádebajo (que normalmente aparece marcado con una interrupción).
Es posible que al proyectar dos nudos diferentes en determinadadirección, se pierda información y se obtenga la mismaproyección. Para que esto no suceda se trabaja siempre con lasllamadas proyecciones regulares, que contienen toda lainformación necesaria.
Pero el mismo nudo admitirá distintas representaciones en formade diagrama, así que surge el primer problema fundamental,
¿cuándo dos diagramas representarán el mismo nudo?En 1927, el teorema de Reidemeister resolverá parcialmente este problema. Dicho teorema permite decidir si unnudo es igual otro tan sólo haciendo dibujos y es una fuerte herramienta para la prueba de algunos invariantes.El teorema de Reidemeister dice lo siguiente: Para pasar de una proyección regular de un nudo a otra proyecciónsólo se necesitan realizar sucesivamente movimientos de alguno de los siguientes tipos:
Tipo 1. Tipo 2.
Tipo 3.
Aunque este resultado aparentemente resuelve el problema, no proporciona un algoritmo para determinar si dosnudos son equivalentes. Así, a priori no se conoce el número de movimientos necesarios para transformar undiagrama en otro. Tampoco es posible saber con certeza en un tiempo finito si dos nudos no son equivalentes. Unavance significativo en esta dirección fue la introducción en 1929 de los primeros invariantes.

Teoría de nudos 149
Invariantes de nudosUn invariante de nudos es una "cantidad" que es la misma para nodos equivalentes. Aun así, un solo invariante puedetomar el mismo valor para dos nudos diferentes, siendo insuficiente para distinguirlos.En la lista de invariantes clásicos debemos incluir:• La tricoloreabilidad• El grupo de un nudo, que es el grupo fundamental de su complemento.• El polinomio de Alexander.Al final del siglo XX fueron descubiertos nuevos invariantes como:•• Los invariantes hiperbólicos.• El polinomio de Jones y sus dos generalizaciones más conocidas, el polinomio HOMFLY y el polinomio de
Kauffman, ambos generados por grupos cuánticos.De todos modos, los invariantes nombrados son solo la punta del iceberg de la moderna teoría de nudos.
En la topología de dimensiones bajasUn nudo tiene importancia como determinador de cierto tipo de 3-variedades que son los complementos de nudos.
Nudos en dimensiones más altasEn cuatro dimensiones, cualquier circunferencia anudada es equivalente al nudo trivial. Sin embargo, la teoria de losnudos se puede generalizar a embebimientos de subvariedades en variedades. Por ejemplo, una 2-esfera embebida enuna 4-esfera. Tal embebimiento se considerará no anudado si existe un homeomorfismo del espacio ambiente (la4-esfera) en sí misma que lleve la 2-esfera considerada en la 2-esfera canónica. Lo mismo puede decirse parasuperficies compactas orientables o no. Podemos pensar que los dibujos de una botella de Klein auto-intersectandoseen el espacio es el diagrama de una superficie anudada en la 4-esfera.También podemos considerar enlaces de subvariedades.
Referencias• Colin Adams, The Knot Book: An Elementary Introduction to the Mathematical Theory of Knots, 2001, ISBN
0-7167-4219-5• M.A. Armstrong, Topología Básica, Ed. Reverté, 1987. ISBN 84-291-5018-8. (capítulo X)• Dale Rolfsen, Knots and Links, Berkeley: Publish or Perish, Inc. 1976. ISBN 0-914098-16-0
Enlaces externos• Revisión sobre nudos, enlaces y su papel en el estudio de variedades tridimensionales [1]
• KnotInfo [2]: Tabla de nudos invariantes y recursos sobre la teoría de nudos.• La wiki atlas de nudos [3]: detallada información acerca de nudos• KnotPlot [4]: software para investigar las propiedades geométricas de los nudos.

Teoría de nudos 150
Referencias[1] http:/ / www. unizar. es/ acz/ 02AcademicosNumerarios/ Discursos/ Maite. pdf[2] http:/ / www. indiana. edu/ ~knotinfo/[3] http:/ / katlas. math. toronto. edu/ wiki/[4] http:/ / knotplot. com/
Espacio de HausdorffEn topología, un espacio de Hausdorff, separado o es un espacio topológico en el que puntos distintos tienenentornos disjuntos.Los espacios de Hausdorff se llaman así en honor de Felix Hausdorff, uno de los fundadores de la topología. Ladefinición original de Hausdorff de un espacio topológico (de 1914) incluía la propiedad de Hausdorff como axioma.Todo espacio métrico (y por lo tanto todo espacio normado) es un espacio de Hausdorff.
DefinicionesDados dos puntos e de un espacio topológico , se dice que ambos puntos gozan de la propiedad deHausdorff si existen dos entornos de y de tales que .Un espacio topológico se dice que es un espacio de Hausdorff, o que verifica la propiedad de Hausdorff, o que es
, si todo par de puntos del espacio verifican la propiedad de Hausdorff.
Principales propiedades de los Espacio de HausdorffTodo espacio de Hausdorff es también de Fréchet o T1, y por lo tanto también es un espacio T D y también unespacio de Kolmogórov o .Así pues, por ser , todo conjunto unitario es cerrado.

Axiomas de separación 151
Axiomas de separación
Uno de los grados posibles de separación es el de los espacios T2 oHausdorff, en que puntos diferentes siempre están separados por abiertos
disjuntos.
En topología los axiomas de separación sonpropiedades que puede satisfacer un espaciotopológico en función del grado en que distintospuntos o conjuntos cerrados pueden ser separadospor medio de los abiertos de la topología.[1]
Existen varios niveles crecientes de separación quese pueden pedir a un espacio topológico. Suelendenominarse con la letra T (de Trennung,separación en alemán) y un subíndice conveniente.Así aparece una jerarquía de espacios, entre losque cabe destacar a los espacios T2 o espacios deHausdorff, los T3 o espacios regulares y los T4 oespacios normales.
Salvo para T0, T1 y T2, los nombres de los axiomas de separación no están completamente estandarizados.[2]
IntroducciónLa definición de topología, en su generalidad, admite estructuras topológicas poco útiles: pensemos en un conjunto Xcon más de un elemento, dotado con la topología trivial (i.e. sus únicos abiertos son Ø y todo X). Esta topología nocontiene abiertos que nos permitan distinguir topológicamente dos puntos diferentes: ambos puntos comparten elúnico entorno posible. Mirando los entornos abiertos de cada punto nos resulta imposible distinguirlos. Decimos que,a efectos topológicos, X no es diferente de un conjunto de un solo punto dotado de la topología trivial.[3]
Los axiomas de separación son requisitos sobre la topología de un espacio que garantizan la existencia de un númerosuficiente de conjuntos abiertos como para distinguir topológicamente puntos distintos. Los diferentes grados en quese concreta esta exigencia se plasma en los diferentes axiomas de separación.
Algunos axiomas de separación
Espacios T0 o de Kolgomorov
Un espacio topológico se llama si y solo si para cualquier par de puntos existe un abierto quecontiene uno de los puntos y no contiene el otro punto.Una equivalencia a esta propiedad es la siguiente: si son elementos del espacio tales que la clausura de
y la clausura de sean iguales entonces
Espacios o Fréchet
Un espacio topológico X se dice si y solo si para cualquier par de puntos x, y de X hay un par de conjuntosabiertos , , tal que x esté , pero no en , y además y esté , pero no en . Una equivalenciaimportante es que X es si y solo si los subconjuntos de X formados por un único punto son cerrados.

Axiomas de separación 152
Espacios o de Hausdorff
Un espacio topológico X es de Hausdorff o si y solo si para cualquier par de puntos x, y en X existe un par deabiertos disjuntos que contiene uno a x y otro a y.Estos espacios son especialmente importantes pues además de suponer una gran cantidad de ejemplos (todos losespacios métricos son ), tienen propiedades fuertes como el que la convergencia de una sucesión o de un filtro,en caso de existir, sea única.
Espacios o regulares
Un espacio topológico X es regular si es y para cada punto y cualquier cerrado tal que x nopertenece a F. Entonces existes entornos y tales que su intersección es vacía. Es decir, podemos separarpuntos de cerrados.
Espacios , completamente regulares o Tychonoff
Un espacio topológico X es completamente regular si es y para cada punto y cualquier cerradotal que x no pertenece a F existe una función continua tal que y
.
Espacios o normales
Un espacio topológico X es normal si es y para cada par de cerrados con interseccion vacíaexisten unos entornos que los contengan y tal que su intersección sea vacía. Es decir, podemos separartodos los cerrados del espacio. En particular los espacios métricos son normales.
Separación en espacios métricosEs fácil verificar que . Es cierto que , aunque esto no es tan evidente,es una consecuencia del Lema de Urysohn. Un espacio métrico con su distancia asociada es normal,Tychonoff, regular, Hausdorff, Fréchet y finalmente Kolgomorov. Es importante destacar, para evitar errores, que elrecíproco no es cierto.Veamos que es cierto que todo espacio métrico es normal o y por consiguiente es Tychonoff, regular, Hausdorff,Fréchet y Kolgomorov.Todo espacio métrico, con su distancia es normal.Demostración: Sean y dos cerrados de un espacio métrico . Para cada sea .
Análogamente, para cada sea . Sea , y sea . Es
claro que tanto U, como V son abiertos, y que y . Se afirma que .
Supongamos que es falso, entonces sea . Quiere decir que existen x, y y tal que y
. Pero eso implica que:
Lo cual es una contradicción. Por tanto todos los espacios métricos son normales, y por tanto Tychonoff, regulares, Hausdorff, Fréchet yKolgomorov.

Axiomas de separación 153
Referencias[1] L. A. Steen, J. A. Seebach. Counterexamples in topology. Courier Dover Publications, 1995. ISBN 0-486-68735-X (sección 2)[2] Runde, V. A taste of topology. Springer, 2005. ISBN 0-387-25790-X (Capítulo 3)[3] Willard, S.. General Topology. Courier Dover Pub, 2004. ISBN 0-486-43479-6. (Capítulo 5)
Grupo de isometríaEl grupo de isometría de un conjunto está formado por todas las transformaciones geométricas formado portraslaciones, rotaciones y reflexiones que no alteran las distancias de un conjunto.En un grupo de isometría, la operación de grupo viene dada por la composición de isometrías, y el inverso de unatransformación o operación de simetría es precisamente la operación de deshacer dicha operación.
Grupo de isometría del espacio euclídeoEn el espacio euclídeo podemos definir varias operaciones que no alteran las distancias. Así por ejemplo siconsideramos un objeto dentro del espacio euclídeo podemos transportarlo a otra posición y cambiar su orientación.Así el grupo de isometría está formado por:• Las traslaciones o conjunto de aplicaciones de la forma:• Las rotaciones, que pueden representarse matemáticamente el conjunto de aplicaciones de la forma: ,
donde es una matriz de determinante 1 que cumple A estas transformaciones podemos sumarle una transformación más abstracta que no podemos realizar con objetosfísicos reales pero sí abstractametne sobre conjuntos del espacio, formada por:• Las reflexiones y las composiciones de diversas reflexiones. Una reflexión puede representarse por una matriz de
determinante -1.El conjunto de todas las rotaciones y reflexiones forma un subgrupo muy importante del grupo de isometrías,llamado grupo ortonormal y designado como está formado
Grupo de isometría de figuras geométricas
Transformaciones que forman el grupo diédrico D4
Si una figura geométrica es finita, esdecir, forma un conjunto acotado delespacio euclídeo, entonces el grupo deisometría no incluye ninguna traslacióny por tanto su grupo de isometría es unsubgrupo del espacio . Si lafigura presenta sólo un número finitode (hiper)planos de simetría entoncesel grupo de isometría será un grupo finito.

Grupo de isometría 154
Grupo de isometría de un polígono regularEl grupo de isometría de un polígono regular de n lados está formado por n rotaciones y n reflexiones, llamado grupodiédrico , formado por 2n elementos expresables en forma matricial como:
Grupo de isometría de un círculo
El grupo de isometría de un círculo al existir infinitos planos de simetría es precisamente y cualquiersimetría de un círculo centrado en el origen puede ser representado por una matriz de la forma:
Donde y .
Grupo de isometría de un rectánguloEl grupo de isometría de un rectángulo, que no sea un cuadrado, se llama grupo de Klein y está formado por cuatroelementos: rotación de 180º, reflexión según el eje de simetría vertical, reflexión el eje de simetría horizontal y laidentidad (rotación de 0º).
Grupo de isometría de espacios con producto internoLa distancia en ciertos espacios métricos puede definirse a partir de la norma inducida por un producto interno oforma cuadrática métrica. Un ejemplo de esto son las variedades de Riemann.De ese modo cualquier aplicación entre variedades de Riemann en sí misma que mantenga inalterado el productointerno de dos campos vectoriales es de hecho una isometría. Eso permite generalizar el concepto de isometríaincluso a espacios que no tienen una distancia bien definida, como las variedades pseudoriemannianas. En unavariedad pseudoriemanniana una isometría es una transformación o aplicación que mantiene el producto interno dedos vectores.
Grupo de isometría en teoría de la relatividadEn la teoría de la relatividad un espacio-tiempo se representa por una variedad pseudoriemanniana. Esta variedad enel caso de la teoría especial, puede tener un grupo de isometría continuo dado por un grupo de Lie de dimensiónmenor o igual que diez. La dimensión de este grupo de isometría coincide con el número de vectores de Killinglinealmente independiente que admite el tensor métrico de la variedad pseudoriemanniana que define la forma ypropiedades básicas del espacio-tiempo.

Grupo puntual 155
Grupo puntual
La flor Bauhinia blakeana representada en la bandera de HongKong tiene simetría C5; la estrella interior de cada pétalo tiene
simetría D5.
En geometría y cristalografía, un grupo puntual es ungrupo de simetrías geométricas (grupo de isometría) quemantiene constante por lo menos un punto fijo. Losgrupos puntuales pueden existir en un espacio euclidianode cualquier otra dimensión, y cada grupo puntual en ladimensión d es un subgrupo del grupo ortogonal O(d).Los grupos puntuales pueden ser considerados como unconjunto de matrices ortogonales M que transforman unpunto x en un punto y:
y= M.x
donde el origen es el punto fijo. Los elementos de losgrupos puntuales pueden ser: rotaciones (determinante deM= 1) rotaciones impropias, reflexiones,rotaciones-reflexiones, o rotoreflexiones (determinante de M= -1). Todos los grupos puntuales de las rotaciones dedimensión d son subgrupos del grupo ortogonal especial SO(d).
Los grupos puntuales discretos en más de una dimensión se agrupan en familias infinitas, pero por el teorema derestricción cristalográfica y por uno de los teoremas de Bieberbach, cada número de dimensiones sólo tiene unnúmero finito de grupos puntuales que son simétricos respecto de una red o retícula con ese número de dimensiones.Estos son los grupos puntuales cristalográficos.
Una dimensiónSólo hay dos grupos puntuales unidimensionales, el grupo identidad y el grupo reflexión.
Grupo Coxeter Diagrama de Coxeter Orden Descripción
C1 [ ]+ 1 Identidad
D1 [ ] 2 Grupo reflexión
Dos dimensionesLos grupos puntuales planos son a veces llamados grupos de roseta.Se agrupan en dos familias infinitas:1. Grupos cíclicos Cn o grupos de rotación de orden n2. Grupos diedral Dn de rotación de orden n y grupos de reflexión.Aplicando el teorema de restricción cristalográfica n queda limitado a los valores 1, 2, 3, 4 y 6 para ambas familias,produciendo 10 grupos.

Grupo puntual 156
Grupo Intl Orbifold Coxeter Orden Descripción
Cn n nn [n]+ n Cíclico: rotaciones de orden n. Extraer el grupo Zn, el grupo de los enteros bajo la adición módulo n.
Dn nm *nn [n] 2n Diedral: cíclico con reflexiones. Extraer el grupo Dihn, el grupo diedral.
El subconjunto de grupos puntuales de reflexión pura, se define por uno o dos ejes de simetría, también se puede darpor su grupo de Coxeter y polígonos relacionados. Estos incluyen cinco grupos cristalográficos.
Grup0 Coxeter group Diagrama de Coxeter Orden Polígonos relacionados
D3 A2 [3]
6 Triángulo equilátero
D4 BC2 [4]
8 Cuadrado
D5 H2 [5]
10 Pentágono regular
D6 G2 [6]
12 Hexágono regular
Dn I2(n) [n]
2n Polígono regular
D2n I2(2n) [[n]]=[2n]
4n Polígono regular
D2 A12 [2]
4 Rectángulo
D1 A1 [ ] 2 Dígono
Tres dimensionesLos grupos puntuales tridimensionales son a veces llamados grupos puntuales moleculares por su amplio uso en elestudio de las simetrías de las moléculas pequeñas.Se agrupan en siete familias infinitas de grupos axiales o prismáticos, y 7 grupos poliédricos adicionales o gruposplatónicos. En notación de Schönflies,• Los grupos axiales: Cn, S2n, Cnh, Cnv, Dn, Dnd, Dnh• Grupos poliédricos: T, Td, Th, O, Oh, I, IhAplicando el teorema de restricción cristalográfica a estos grupos se obtienen los 32 grupos puntualescristalográficos.

Grupo puntual 157
Intl* Geo[1]
Orbifold Schönflies Conway Coxeter Orden
1 1 1 C1 C1 [ ]+ 1
1 22 ×1 Ci = S2 CC2 [2+,2+] 2
2 = m 1 *1 Cs = C1v = C1h ±C1 = CD2 [ ] 2
23456n
23456n
2233445566nn
C2C3C4C5C6Cn
C2C3C4C5C6Cn
[2]+
[3]+
[4]+
[5]+
[6]+
[n]+
23456n
2mm3m
4mm5m
6mmnmmnm
23456n
*22*33*44*55*66*nn
C2vC3vC4vC5vC6vCnv
CD4CD6CD8CD10CD12CD2n
[2][3][4][5][6][n]
46810122n
2/m3/m4/m5/m6/mn/m
2 23 24 25 26 2n 2
2*3*4*5*6*n*
C2hC3hC4hC5hC6hCnh
±C2CC6±C4CC10±C6
±Cn / CC2n
[2,2+][2,3+][2,4+][2,5+][2,6+][2,n+]
46810122n
4385122nn
4 26 28 210 212 22n 2
2×3×4×5×6×n×
S4S6S8S10S12S2n
CC4±C3CC8±C5CC12
CC2n / ±Cn
[2+,4+][2+,6+][2+,8+][2+,10+][2+,12+][2+,2n+]
46810122n
Intl* Geo[1]
Orbifold Schönflies Conway Coxeter Orden
2223242252622n22n2
2 23 24 25 26 2n 2
22222322422522622n
D2D3D4D5D6Dn
D4D6D8D10D12D2n
[2,2]+
[2,3]+
[2,4]+
[2,5]+
[2,6]+
[2,n]+
46810122n
mmm6m2
4/mmm10m2
6/mmmn/mmm2nm2
2 23 24 25 26 2n 2
*222*223*224*225*226*22n
D2hD3hD4hD5hD6hDnh
±D4DD12±D8
DD20±D12
±D2n / DD4n
[2,2][2,3][2,4][2,5][2,6][2,n]
8121620244n
42m3m82m5m
122m2n2mnm
4 26 28 2102122
n 2
2*22*32*42*52*62*n
D2dD3dD4dD5dD6dDnd
±D4±D6
DD16±D10DD24
DD4n / ±D2n
[2+,4][2+,6][2+,8][2+,10][2+,12][2+,2n]
8121620244n
23 3 3 332 T T [3,3]+ 12
m3 4 3 3*2 Th ±T [3+,4] 24
43m 3 3 *332 Td TO [3,3] 24
432 4 3 432 O O [3,4]+ 24
m3m 4 3 *432 Oh ±O [3,4] 48
532 5 3 532 I I [3,5]+ 60
53m 5 3 *532 Ih ±I [3,5] 120
(*) Cuando el símbolo en la columna Intl aparece duplicado, el primero es para n par, el segundo para n impar.
El subconjunto de grupos puntuales de reflexión pura, definido por 1 a 3 planos de simetría, también se puede darpor su grupo de Coxeter y poliedros relacionados. El grupo [3,3] se puede doblar, notándose como [[3,3]], haciendocoincidir los ejes primero y último uno sobre el otro, duplicando la simetría a orden 48, y resultando isomorfo con elgrupo [4,3].

Grupo puntual 158
Schönflies Grupo de Coxeter Diagrama de Coxeter Orden Poliedro regular y prismático relacionado
Td A3 [3,3]
24 Tetraedro
Oh BC3 [4,3]=[[3,3]]
48 Cubo, octaedroOctaedro estrellado
Ih H3 [5,3]
120 Icosaedro, dodecaedro
D3h A2×A1 [3,2]
12 Prisma triangular
D4h BC2×A1 [4,2]
16 Prisma cuadrado
D5h H2×A1 [5,2]
20 Prisma pentagonal
D6h G2×A1 [6,2]
24 Prisma hexagonal
Dnh I2(n)×A1 [n,2]
4n Prisma n-gonal
D2h A13 [2,2]
8 Cuboide
C3v A2×A1 [3]
6 Hosoedro
C4v BC2×A1 [4]
8
C5v H2×A1 [5]
10
C6v G2×A1 [6]
12
Cnv I2(n)×A1 [n]
2n
C2v A12 [2]
4
Cs A1 [ ] 2
Notas[1] The Crystallographic Space groups in Geometric algebra, D. Hestenes and J. Holt, Journal of Mathematical Physics. 48, 023514 (2007) (22
pages) PDF (http:/ / geocalc. clas. asu. edu/ pdf/ CrystalGA. pdf)
Referencias• Los grupos puntuales. (http:/ / books. google. es/ books?id=rXCj4B7_JZgC& pg=PA2) En: Teoría de grupos
aplicada para químicos, físicos e ingenieros. Allen Nussbaum. Editorial Reverté, 1975. ISBN: 842914109X.• H.S.M. Coxeter: Kaleidoscopes: Selected Writings of H.S.M. Coxeter, editied by F. Arthur Sherk, Peter
McMullen, Anthony C. Thompson, Asia Ivic Weiss, Wiley-Interscience Publication, 1995, ISBN978-0-471-01003-6 (http:/ / www. wiley. com/ WileyCDA/ WileyTitle/ productCd-0471010030. html)• (Paper 23) H.S.M. Coxeter, Regular and Semi-Regular Polytopes II, [Math. Zeit. 188 (1985) 559-591]
• H.S.M. Coxeter and W. O. J. Moser. Generators and Relations for Discrete Groups 4th ed, Springer-Verlag. NewYork. 1980
• N.W. Johnson: Geometries and Transformations, Manuscript, (2011) Chapter 11: Finite symmetry groups

Grupo puntual 159
Enlaces externos• Tutorial sobre grupos puntuales (http:/ / www. reciprocalnet. org/ edumodules/ symmetry/ index. html) (necesita
Java y Flash)• Lista de subgrupos (http:/ / plus. swap-zt. com/ 2010/ 06/ sieve) (necesita Java)• The Geometry Center: 2.1 Formulas for Symmetries in Cartesian Coordinates (two dimensions) (http:/ / www.
geom. uiuc. edu/ docs/ reference/ CRC-formulas/ node9. html)• The Geometry Center: 10.1 Formulas for Symmetries in Cartesian Coordinates (three dimensions) (http:/ / www.
geom. uiuc. edu/ docs/ reference/ CRC-formulas/ node45. html)
Grupo ortogonalEn matemática, el grupo ortogonal de grado n sobre un cuerpo F (escrito como O(n, F)) es el grupo de matricesortogonales n por n con las entradas en F, con la operación de grupo dada por la multiplicación de matrices. Éste esun subgrupo del grupo general lineal GL(n, F).Cada matriz ortogonal tiene determinante 1 o -1. Las matrices n por n ortogonales con determinante 1 forman unsubgrupo normal de O(n, F) conocido como el grupo ortogonal especial SO(n, F). Si la característica de F es 2,entonces O(n, F) y SO(n, F) coinciden; si no el índice de SO(n, F) en O(n, F) es 2.O(n, F) y SO(n, F) son grupos algebraicos, porque la condición que una matriz sea ortogonal, es decir que su propiatranspuesta sea su inversa, se puede expresar como un conjunto de ecuaciones polinómicas en las entradas de lamatriz.
Los grupos O(n) y SO(n) realesSobre el cuerpo de los números reales, el grupo ortogonal y el grupo ortogonal especial a menudo es denotado simplemente por y si no hay confusión posible. Forman grupos de Lie realescompactos de dimensión n (n -1)/2. O(n, R) tiene dos componentes conexas, con SO(n, R) la componente conexaque contiene la matriz identidad.Los grupos ortogonales especiales reales y ortogonales reales tienen interpretaciones geométricas simples. O(n, R) esisomorfo al grupo de isometrías de Rn que dejan el origen fijo. SO(n, R) es isomorfo al grupo de rotaciones de Rn
que deja el origen fijo.SO(2, R) es isomorfo (como grupo de Lie) al círculo S¹, consistiendo en todos los números complejos de valorabsoluto 1, con la multiplicación de números complejos como operación de grupo. Este isomorfismo envía elnúmero complejo exp(φi) = cos(φ) + isin(φ) a la matriz ortogonal:
El grupo SO(3, R), entendido como el conjunto de rotaciones del espacio de 3 dimensiones, es de gran importanciaen las ciencias y la ingeniería. Para una descripción detallada, véase grupo de rotación.En términos de topología algebraica, para n > 2 el grupo fundamental de SO(n, 'R) es cíclico de orden 2, y el grupoespinorial Spin(n) es su cubrimiento universal. Para n = 2 el grupo fundamental es cíclico infinito y el cubrimientouniversal corresponde a la recta real.El álgebra de Lie asociada a los grupos de Lie O(n, R) y SO(n, R) consiste en las matrices anti-simétricas reales npor n, con el corchete de Lie dado por el conmutador. Este álgebra de Lie es denotada a menudo por el o(n, R) o porel so(n, R).

Grupo ortogonal 160
Propiedades
• Los [grupos de Lie] y tienen dimensión .• El grupo no es conexo.• El grupo es conexo, aunque no es simplemente conexo. Para n > 2 sí es simplemente conexo.
Los grupos O(n,C) y SO(n,C) complejosSobre el cuerpo C de los números complejos, O(n, C) y SO(n, C) son grupos de Lie complejos de dimensión n (n-1)/2 sobre C (que significa que la dimensión sobre R es dos veces ésa). O(n, C) tiene dos componentes conexas, ySO(n, C) es la componente conexa que contiene la matriz identidad. Para n ≥ 2 estos grupos son no compactos.Exactamente como en el caso real SO(n, C) no es simplemente conexo. Para n > 2 el grupo fundamental de SO(n, C)es cíclico de orden 2 mientras que el grupo fundamental de SO(2, C) es cíclico infinito.El álgebra de Lie compleja asociada a O(n, C) y SO(n, C) consiste en las matrices anti-simétricas complejas n por n,con el corchete de Lie dado por el conmutador.
Asuntos relacionados• grupo de rotación, SO(3, R)•• grupo ortogonal generalizado•• grupo unitario•• grupo simpléctico
Matriz ortogonalUna matriz ortogonal es un matriz cuadrada cuya matriz inversa coincide con su matriz traspuesta. El conjunto dematrices ortogonales constituyen una representación lineal del grupo ortogonal .Geométricamente las matrices ortogonales representan transformaciones isométricas en espacios vectoriales reales[1]
(o más exactamente espacios de Hilbert reales) llamadas justamente, transformaciones ortogonales. Estastransformaciones son isomorfismos internos del espacio vectorial en cuestión. En el caso real dichas transformcionespueden ser rotaciones, reflexiones especulares o inversiones y son usadas extensivamente en computación gráfica.Por sus propiedades, también son usadas para el estudio de ciertos fibrados y en física se las usa en el estudio delmovimiento de cuerpos rígidos y en la formulación de ciertas teorías de campos.
DefiniciónSea un número natural y sea una matriz cuadrada por , con entradas reales. Se dice que la matriz esortogonal si:
donde representa la matriz traspuesta de e representa la matriz identidad.
EjemplosSupongamos que la matriz de números reales
es ortogonal y su determinante es +1 ó -1. Su traspuesta es igual a su inversa

Matriz ortogonal 161
de modo que = y = y la matriz es de la forma
Finalmente,
Así que los números y satisfacen además la propiedad que la suma de sus cuadrados vale 1. Por lo tanto, existeun número real para el cual
Concluimos que: toda matriz ortogonal de tamaño 2 puede escribirse como
con real.
CaracterizaciónSea una matriz ortogonal por . Sean , , los vectores fila de la matriz. En término deestos vectores, es muy fácil expresar los elementos de la matriz que resulta de multiplicar por su transpuesta:
De modo que los vectores fila de una matriz ortogonal forman un conjunto de vectores ortonormales. Puesto quela ecuación
también se verifica, tenemos que los vectores columna de la matriz también forman un conjunto ortonormal devectores. Como el recíproco de todo esto también es cierto, tenemos
Una matriz real es ortogonal si y sólo si sus vectores filas o vectores columna son cada uno unconjunto ortonormal de vectores.
Es en este sentido que se dice que se ha hecho una caracterización de las matrices ortogonales. Dada una matriz,basta verificar esta propiedad entre sus vectores fila y columna para determinar si dicha matriz es o no ortogonal.
Propiedades• De la definición, es inmediato que si una matriz es ortogonal, la matriz es no singular o invertible y su transpuesta
coincide con su inversa• El determinante de una matriz ortogonal es +1 ó -1. En efecto, de las propiedades del determinante tenemos
y por tanto,
• El conjunto de matrices nxn ortogonales, junto con la operación de producto de matrices es un grupo llamadogrupo ortogonal O(n). Supongamos que y son matrices ortogonales y sea igual al producto de por
. Usando las propiedades del producto de matrices, tenemos

Matriz ortogonal 162
y así, el producto de matrices ortogonales es una matriz ortogonal.• En teoría de grupos, al grupo de matrices ortogonales por con coeficientes en el cuerpo se denomina
grupo ortogonal de dimensión y se representa con . En particular el subgrupo formado por lasmatrices ortogonales de determinante +1, se llama grupo especial ortogonal y se le representa con .Entre las matrices ortogonales se encuentran las matrices de rotación y las de permutación. Cuando el cuerpo es elde los reales entonces se escribe simplemente y .
Notas[1] Se sobreentiende que al espacio vectorial real, se le ha dotado de un producto interno
Isometría afín
La imagen de un objeto reflejado en un espejo plano, esun ejemplo de transformación isométrica: la simetría.
En geometría, las transformaciones isométricas sontransformaciones de figuras en el plano que se realizan sin variarlas dimensiones ni el área de las mismas; la figura inicial y la finalson semejantes, y geométricamente congruentes.
La palabra isometría tiene su origen en el griego iso (igual omismo) y metria (medir), una definición cercana es igual medida.Existen tres tipos de isometrías: traslación, simetría y rotación.
Traslación
La traslación es una isometría que realiza un cambio de posición,es el cambio de lugar, determinada por un vector.
Traslación del punto A a su imagen A' según el vectorAA'
Traslación de un triángulo.
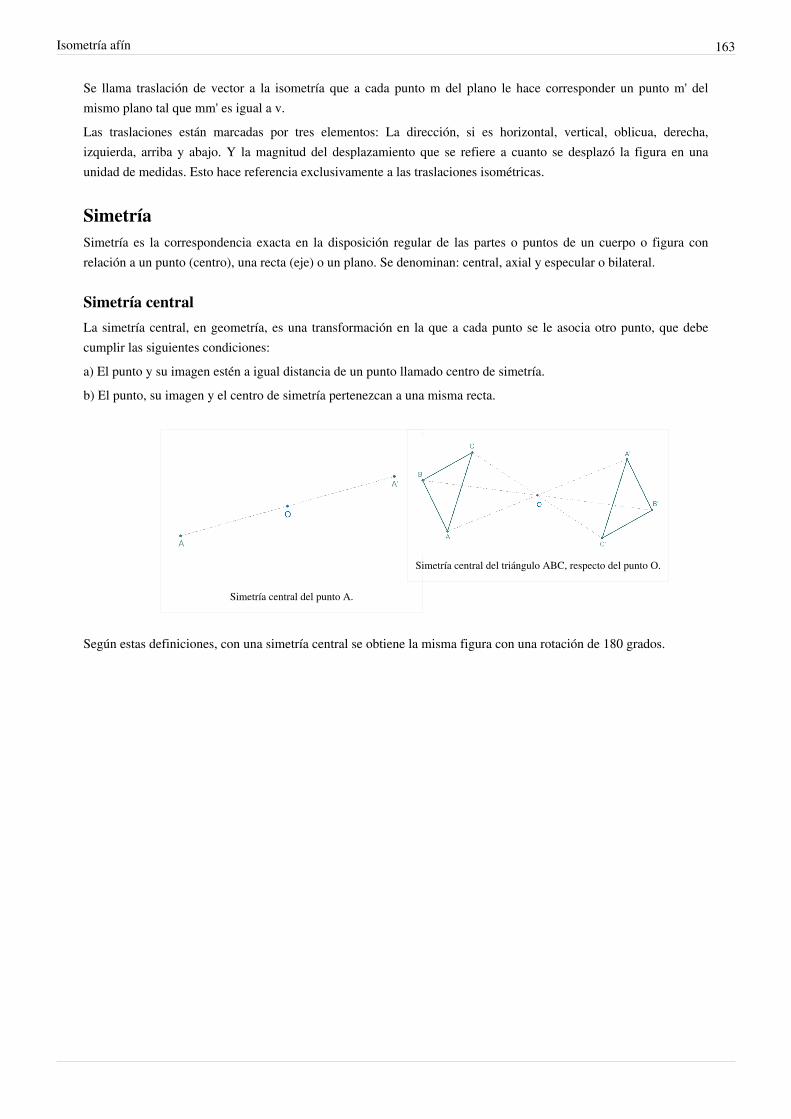
Isometría afín 163
Se llama traslación de vector a la isometría que a cada punto m del plano le hace corresponder un punto m' delmismo plano tal que mm' es igual a v.Las traslaciones están marcadas por tres elementos: La dirección, si es horizontal, vertical, oblicua, derecha,izquierda, arriba y abajo. Y la magnitud del desplazamiento que se refiere a cuanto se desplazó la figura en unaunidad de medidas. Esto hace referencia exclusivamente a las traslaciones isométricas.
SimetríaSimetría es la correspondencia exacta en la disposición regular de las partes o puntos de un cuerpo o figura conrelación a un punto (centro), una recta (eje) o un plano. Se denominan: central, axial y especular o bilateral.
Simetría centralLa simetría central, en geometría, es una transformación en la que a cada punto se le asocia otro punto, que debecumplir las siguientes condiciones:a) El punto y su imagen estén a igual distancia de un punto llamado centro de simetría.b) El punto, su imagen y el centro de simetría pertenezcan a una misma recta.
Simetría central del punto A.
Simetría central del triángulo ABC, respecto del punto O.
Según estas definiciones, con una simetría central se obtiene la misma figura con una rotación de 180 grados.

Isometría afín 164
Simetría axialLa simetría axial, en geometría, es una transformación respecto de un eje de simetría, en la cual, a cada punto de unafigura se asocia a otro punto llamado imagen, que cumple con las siguientes condiciones:a) La distancia de un punto y su imagen al eje de simetría, es la misma.b) El segmento que une un punto con su imagen, es perpendicular al eje de simetría.
Simetría axial del punto A.
Simetría axial de un triángulo.
En la simetría axial se conservan las distancias pero no la dirección de los ángulos. El eje de simetría es la mediatrizdel segmento AA'.
Composición de simetríasSi se aplica la misma simetría dos veces, se obtiene una identidad.Si se aplican dos simetrías respecto de ejes paralelos, se obtiene una traslación cuyo desplazamiento es el doble de ladistancia entre dichos ejes.Si se aplican dos simetrías respecto de ejes que se cortan en O, se obtiene giro con centro en O, cuyo ángulo es eldoble del que forman dichos ejes.
RotaciónUna rotación, en geometría, es un movimiento de cambio de orientación de un cuerpo, de forma que, dado un puntocualquiera del mismo, este permanece a una distancia constante de un punto fijo, y tiene las siguientescaracterísticas:•• Un punto denominado centro de rotación.•• Un ángulo•• Un sentido de rotación.estas transformaciones pueden ser positivas o negativas dependiendo del sentido de giro. Para el primer caso debeser un giro en sentido contrario a las manecillas del reloj, y será negativo el giro cuando sea en sentido de lasmanecillas.

Isometría afín 165
Rotación del punto A, respecto del punto O.
Enlaces externos
• Simetrías, en Descartes.cnice.mec.es [1]
• Simetrías, en isftic.mepsyd.es [2]
• Función simétrica, en Descartes.cnice.mec.es [3]
Referencias[1] http:/ / www. isftic. mepsyd. es/ w3/ Descartes/ 4b_eso/ Movimientos_en_el_plano_4b/ Movimi4. htm[2] http:/ / www. isftic. mepsyd. es/ w3/ eos/ MaterialesEducativos/ mem2000/ matefoto/ libro/ ayuda10. htm[3] http:/ / descartes. cnice. mec. es/ materiales_didacticos/ Procedimiento_analizar_funcion/ 2bcnst_14_3. htm
Matriz cuadradaUna
Toda matriz cuadrada se puede descomponer en la suma de una matriz simétrica y una matriz antisimétrica.Si A y B son matrices del mismo orden, entonces se pueden sumar entre sí. Los productos de matrices son válidos enambos sentidos, AB y BA. Además, surgen los conceptos de determinante y traza solo aplicables a matricescuadradas.Una matriz cuadrada A de orden n es singular si su determinante es nulo. En tal caso se dice que dicha matriz notiene inversa.Ejemplo de matriz cuadrada para n = 3:
Las matrices cuadradas son las más utilizadas en álgebra.

Matriz invertible 166
Matriz invertibleEn matemáticas, en particular en álgebra lineal, una matriz cuadrada A de orden n se dice que es invertible, nosingular, no degenerada o regular si existe otra matriz cuadrada de orden n, llamada matriz inversa de A yrepresentada como A−1, tal que
AA−1 = A−1A = In,donde In es la matriz identidad de orden n y el producto utilizado es el producto de matrices usual.Una matriz no invertible se dice que es singular o degenerada. Una matriz es singular si y solo si su determinantees cero.La inversión de matrices es el proceso de encontrar la matriz inversa de una matriz dada.
Ejemplos
Matriz de dos filas
Por ejemplo la inversa de la matriz
es:
porque:
Propiedades de la matriz inversa•• La inversa de una matriz, si existe, es única.•• La inversa del producto de dos matrices es el producto de las inversas cambiando el orden:
•• Si la matriz es invertible, también lo es su transpuesta, y el inverso de su transpuesta es la transpuesta de suinversa, es decir:
•• Y, evidentemente:
•• Una matriz es invertible si y sólo si el determinante de A es distinto de cero. Además la inversa satisface laigualdad:
donde es el determinante de A y es la transpuesta de la matriz de adjuntos de A.

Matriz invertible 167
Demostración de la unicidad de la inversaSupongamos que B y C son inversas de A
Multiplicando por C
De modo que B=C y se prueba que la inversa es única.
Demostración del criterio de inversibilidad de las matrices cuadradasSe probará la doble implicación.
Suficiencia
Suponiendo que existe tal que . Entonces al aplicar la función determinante se obtiene
usando la propiedad
Por lo tanto, es distinto de cero.
Necesidad
Suponiendo que el determinante de es distinto de cero, sea es el elemento ij de la matriz y sea lamatriz sin la fila y la columna (comúnmente conocida como -ésimo menor de A). Entonces
Sea , entonces
Esta afirmación es válida propiedades de los determinantes, pues la parte izquierda de la relación nos conduce a unamatriz con la columna igual a la columna y los demás términos iguales a los de . Entonces
donde cuando y cuando . Entonces
Es decir que tiene inversa izquierda
Como , entonces también tiene inversa izquierda que es
Entonces
Matriz invertible 168
luego, aplicando la transpuesta
Que es lo que se quería demostrar
Métodos de inversión de matrices
Solución analítica
Inversión de matrices 2×2
Calcular la matriz inversa en matrices de 2x2 puede ser muy sencillo. Se puede hacer de la siguiente manera:[1]
Esto es posible siempre y cuando ad - bc, el determinante de la matriz, no sea cero.Ejemplo numérico:
Inversión de matrices de órdenes superiores
Para matrices de órdenes superiores puede utilizarse la siguiente fórmula:
Donde es la transpuesta de la matriz adjunta de la matriz original; es el determinante de A yes la matriz de adjuntos de A.
Cuando la matriz tiene más de tres filas, está fórmula es muy ineficiente y conduce a largos cálculos. Hay métodosalternativos para calcular la matriz inversa que son bastante más eficientes.
Métodos numéricosEl método de eliminación de Gauss-Jordan puede utilizarse para determinar si una determinada matriz es invertible ypara encontrar su inversa. Una alternativa es la descomposición LU, que descompone una matriz dada comoproducto de dos matrices triangulares, una inferior y otra superior, mucho más fáciles de invertir. Utilizando elmétodo de Gauss-Jordan se coloca a la izquierda la matriz dada y a la derecha la matriz identidad. Luego por mediodel uso de pivotes se intenta formar en la izquierda la matriz identidad y la matriz que quede a la derecha será lamatriz inversa a la dada.
Referencias[1] Strang, Gilbert (2006). Linear Algebra and Its Applications. Thomson Brooks/Cole. pp. 46. ISBN 0-03-010567-6.

Matriz traspuesta 169
Matriz traspuestaSea una matriz con filas y columnas. La matriz transpuesta, denotada con está dada por
En donde el elemento de la matriz original se convertirá en el elemento de la matriz transpuesta .
Ejemplos
Otro ejemplo un poco más grande es el siguiente:
PropiedadesPara toda matriz
Sean A y B matrices con elementos pertenecen a un anillo y sea :
Si el producto de las matrices y está definido,
Si es una matriz cuadrada cuyas entradas son números reales, entonces
es semidefinida positiva.

Matriz traspuesta 170
Definiciones asociadasUna matriz cuadrada es simétrica si coincide con su transpuesta, esto es si
Es antisimétrica si coincide con su negativa.
Si los elementos de la matriz son números complejos y su transpuesta coincide con su conjugada, se dice que lamatriz es hermítica.
y antihermítica si
Vale la pena observar que si una matriz es hermítica (matriz simétrica en el caso de matriz real) entonces esdiagonalizable y sus autovalores son reales. (El recíproco es falso).
Teoría de camposEn física, la teoría de campos describe el conjunto de principios y técnicas matemáticas que permiten estudiar ladinámica y distribución espacial de los campos físicos. Así por ejemplo la teoría de campos permite describirespecíficamente como cambia un campo físico con el tiempo por su interacción consigo mismo y con el entorno.La teoría de campos fue desarrollada en el contexto de la mecánica clásica durante el siglo XIX para describir tantoal campo gravitatorio y el campo eléctrico como otras formas de materia continuas como son los fluidos.Actualmente la teoría cuántica de campos es un campo de investigación muy activo que trata sobre los constituyentesúltimos y estructura de la materia.
IntroducciónLa variación en el espacio y la evolución temporal de formas de materia modelizables como campo físico se describemediante una densidad lagrangiana. Por abuso de lenguaje, esta densidad lagrangina también se llama "lagrangiano".Este "lagrangiano" es el análogo continuo del lagrangiano usado para describir la ecuación de movimiento de unsistema de partículas. Al igual que en el caso de partículas, además de describir la dinámica mediante un"lagrangiano" es posible en el caso de los campos describir su dinámica por medio de un "hamiltoniano".El tratamiento clásico de los campos pasa por buscar ecuaciones diferenciales de evolución derivadas a partir dellagrangiano. Esto se hace introduciendo en lagrangiano en las llamadas ecuaciones de Euler-Lagrange. Por otro lado,el tratamiento cuántico de los campos involucra construir un hamiltoniano cuántico y un espacio de Hilbertadecuado, sobre el que se suele tratar el problema perturbativamente mediante diagramas de Feynman. Losresultados de ambas teorías resultan comparables si se examinan las secciones eficaces del scattering de partículas.En Física Moderna, los campos más estudiados son los que nos dan las cuatro fuerzas fundamentales, para los cualesse han establecido la forma razonablemente exacta de sus respectivos "lagrangianos".

Teoría de campos 171
Historia
Representación matemática de un campo eléctrico comolíneas que cruzan el espacio entre dos partículas cargadas
elécticamente.
Michael Faraday fue el primero en introducir el concepto decampo, durante sus investigaciones sobre magnetismo. Variostrabajos posteriores formalizaron matemáticamente la idea decampo. En teoría clásica de campos matemáticamente estos setratan como una función que varía continuamente a lo largodel espacio y con el tiempo. Aunque inicialmente el conceptode campo se consideró sólo como un artificio matemáticoconveniente, varias evidencias llevaron a considerar el campoelectromagnético y el campo gravitatorio no sólo comocampos de fuerzas definidos matemáticamente, sino comoentidades físicas reales, detectables y medibles a las que eraposible asociarles energía. De hecho en la moderna físicacuántica se considera que no existen partículas materiales sinosimplemente campos materiales. Cuando un campo está muyconcentrado en una región del espacio razonablemente bien definida aparece a escala macroscópica como unapartícula.
La idea de los campos como entidades físicas reales y autónomas se hizo realmente notoria a partir de laformulación, por parte de James Clerk Maxwell, de la primera teoría unificada de campos en física. Maxwell reuniódiversas leyes experimentales sobre los campos eléctricos y magnéticos, y las juntó en un sistema de ecuacionesdiferenciales en derivadas parciales, añadiendo diversos términos por completitud teórica. Los nuevos términospostulados por Maxwell y la predicción de que los campos electromagnéticos en el vacío se propagan en formas deondas electromagnéticas llevaron a la consideración del campo electromagnético como entidad física real, existenteal margen de las cargas eléctricas que pueden estar asociadas a él. Las ecuaciones de la teoría de campo unificadoformulada por Maxwell, se llaman ecuaciones de Maxwell. Al final del siglo XIX, el campo electromagnético fuecomprendido como una colección de dos campos vectoriales en el espacio. Hoy en día, se lo puede reconocer comoun solo campo tensorial antisimétrico de segundo orden en el espacio-tiempo.La teoría de la gravitación de Einstein, llamada teoría general de la relatividad, es otro ejemplo de una teoría decampos. Aquí el principal campo es el tensor métrico, un campo tensorial simétrico de rango 2 en el espacio-tiempo.
Campos ClásicosLos dos principales ejemplos de campos clásicos son la electrodinámica clásica y el campo gravitatorio. En la teoríaclásica de campos, la variación dinámica de los campos se determina mediante la especificación de una densidadlagrangiana que es una función de las componentes del campo y sus derivadas primeras.Más detalladamente las ecuaciones de variación dinámica se obtienen considerando, la integral de esta densidadlagrangiana sobre un dominio del espacio-tiempo. Así se puede permite construir el funcional de acción en formaintegral y, subsiguientemente, mediante el uso de las ecuaciones de Euler-Lagrange se obtienen las ecuaciones enderivadas parciales que satisface el campo tanto en su variación en el espacio como en su evolución con el tiempo.

Teoría de campos 172
Campos cuánticos
Esquema perturbativo de QFT para la aniquilación de un electrón y un positrón radiandoun gluón, la línea azul representa un campo electromagnético (campo de Yang-Mills con
simetría U(1)) y la línea verde un campo de color (campo de Yang-Mills con simetríaSU(3)).
Actualmente se cree que la mecánicacuántica debería sustentar todos losfenómenos físicos o, por lo menos,permitir replantearlos en términoscuánticos. El marco teórico de la teoríacuántica de campos aúna el tratamientocuántico con las restriccionesimpuestas por la teoría de larelatividad, por lo que de algunamanera la teoría cuántica de campos esmás general que la teoría clásica decampos.
Así la cuantización de laelectrodinámica clásica da lugar a laelectrodinámica cuántica. Laelectrodinámica cuántica esposiblemente la teoría científica mejorcomprobada ya que los datosexperimentales confirman sus predicciones con una altísima precisión (con más cifras significativas que ninguna otrateoría física). Las otras teorías fundamentales de campos cuánticos son la cromodinámica cuántica y la teoríaelectrodébil. Estas tres teorías de campos pueden ser derivadas como casos especiales del llamado Modelo Estándarde la física de partículas. Estas tres teorías matemáticamente tienen la forma de teorías de gauge que usan campos deYang-Mills. Actualmente se están haciendo esfuerzos para conseguir cuantizar la Relatividad General aunque conescaso éxito. Parte del problema consiste en que la teoría de la relatividad general no se deja reducir a un campo deYang-Mills de dimensión finita.
La teoría clásica de campos sigue siendo usada en aquellos casos donde las propiedades cuánticas son negligibles,como por ejemplo la elasticidad de materiales, los fluidos dinámicos y las ecuaciones de Maxwell.
Campos aleatorios continuosLos campos clásicos sobre todo, tales como el campo electromagnético, son usualmente funciones infinitamentederivables, pero hay en algunos casos casi siempre el doble de diferenciales. En contraste, las funcionesgeneralizadas no son siempre continuas. Si vamos con cuidado con los campos clásicos en temperatura finita, losmétodos matemáticos de campos aleatorios continuos tienen que ser usados, porque la fluctuación térmica de loscampos clásicos no son infinitamente diferenciables.Campos aleatorios son colecciones de variables aleatorias; uncampo aleatorio continuo es un campo aleatorio que tiene una colección de funciones. En particular, esmatemáticamente conveniente tomar campos aleatorios continuos como el espacio de Schwartz de funcionescoleccionadas, en dicho caso los campos aleatorios continuos son una distribución.Como una manera brusca de pensar en campos aleatorios, debemos pensar en una función ordinaria que tiende al
casi donde sea, pero donde nosotros tomamos un promedio brusco de todo el infinito sobre una región finita,podremos obtener un resultado finito. Los infinitos no son bien definidos, la última expresión no tiene sentidomatemático, pero el valor finito puede ser asociado con las funciones que nosotros usemos como funciones bruscaspara obtener valores finitos, y estos ya pueden ser definidos. Podemos definir campos aleatorios continuos muy biencomo un mapeo lineal desde el espacio de funciones entre los números reales.

Matriz identidad 173
Matriz identidadEn álgebra lineal, la matriz identidad es una matriz que cumple la propiedad de ser el elemento neutro del productode matrices. Esto quiere decir que el producto de cualquier matriz por la matriz identidad (donde dicho producto estédefinido) no tiene ningún efecto. La columna i-ésima de una matriz identidad es el vector unitario de una basevectorial inmersa en un espacio Euclídeo de dimensión n. Toda matriz representa una aplicación lineal entre dosespacios vectoriales de dimensión finita. La matriz identidad se llama así porque representa a la aplicaciónidentidad que va de un espacio vectorial de dimensión finita a sí mismo.
DefiniciónComo el producto de matrices sólo tiene sentido si sus dimensiones son compatibles, existen infinitas matricesidentidad dependiendo de las dimensiones. , la matriz identidad de tamaño , se define como la matriz diagonalque tiene valor 1 en cada una de las entradas de la diagonal principal, y 0 en el resto. Así,
Empleando la notación que a veces se usa para describir concisamente las matrices diagonales, resulta:
Si el tamaño es inmaterial, o se puede deducir de forma trivial por el contexto, entonces se escribe simplementecomo .También se puede escribir usando la notación delta de Kronecker:
o, de forma aún más sencilla,
La matriz identidad de orden n puede ser también considerada como la matriz permutación que es elemento neutrodel grupo de matrices de permutación de orden n!.

Paridad (física) 174
Paridad (física)En física, una transformación de la paridad (también llamada inversión de la paridad) es el cambio simultáneoen el signo de toda coordenada espacial:
Una representación de una matriz 3×3 de P podría tener un determinante igual a -1, y por lo tanto no puede reducir auna rotación. En un plano, la paridad no es lo misma que una rotación de 180 grados. Es importante que eldeterminante de la matriz P sea -1, que no ocurre en una rotación de 180 grados en 2 dimensiones. Aquí unatransformación del signo de x o de y, no de ambos.
Relaciones de simple simetríaBajo rotación, en la geometría clásica los objetos pueden ser clasificados en escalares, vectores u tensores de rangomayor. En la física clásica, configuraciones físicas necesitan ser transformadas bajo representaciones de cada gruposimétrico.En la teoría cuántica, los estados en un espacio de Hilbert no necesitan transformarse bajo representaciones de grupode rotaciones, pero solo bajo la representación proyectiva. La palabra proyectiva se refiere al hecho que si uno de losproyectos se desfasan del estado, cuando recordamos que la fase de un estado cuántico no es observable, luego larepresentación proyectiva se reduce a una representación ordinaria. Todas las representaciones son tambiénrepresentaciones proyectivas, pero la conversión no es cierta, por lo tanto la condición de representacionesproyectivas en un estado cuántico es más débil que la condición de representación de un estado clásico.Las representaciones proyectivas de cualquier grupo son isomorfas a las representaciones ordinarias de una extensióncentral de grupo. Por ejemplo, representaciones proyectivas de un grupo rotacional de 3 dimensiones, que es de ungrupo especial ortogonal SO(3), son representaciones ordinarias de un grupo especial unitario SU(2).Representaciones proyectivas de un grupo de rotación que no son representaciones llamadas espinoriales y así losestados cuánticos pueden transformarse no sólo en tensores si no también en espinoriales.Si se añade a esto una clasificación por paridad, esto puede ser extendido, por ejemplo, en las nociones de• escalares (P = 1) y seudoescalares (P= -1) que son rotacionalmente invariantes.• vectores (P = -1) y vectores axiales (o seudovectores) (P = 1) que ambas transforman como vectores bajo
rotación.Uno puede definir reflexiones tales como
que también tiene determinante negativo. Luego, combinándolos con rotaciones uno puede generar que latransformación de la paridad tenga un determinante positivo, y por lo tanto puede obtener una rotación. Se usareflexiones para extender la noción de escalares y vectores a seudoescalares y seudovectores.Las formas de paridad de un grupo abeliano Z2 debido a una relación P2 = 1. Todo grupo abeliano tiene solo unarepresentación irreductible dimensional. Para Z2, hay dos representaciones irreductibles: uno es par bajo paridad(P φ = φ), la otra es impar (P φ = –φ). Es muy útil en mecánica cuántica. Sin embargo, como se detallará acontinuación, bajo representaciones proyectivas y así en principio una transformación de la paridad puede rotar de unestado a otro por cualquier fase.

Paridad (física) 175
Se dice que un objeto físico presenta simetría P si es invariante respecto a cualquier operación de simetría como lasanteriormente descritas, consistentes en cambiar el signo de una de las coordenadas espaciales.
Física ClásicaLas ecuaciones de Newton del movimiento F = m a (si la masa es constante) iguala dos vectores, y por lo tanto esinvariante bajo paridad. La ley de gravitación también envuelve solo vectores y es también, por lo tanto, invariantebajo paridad. Sin embargo el momento angular L es un vector axial.
L = r × p,P(L) = (-r) × (-p) = L.
En la electrodinámica clásica, la densidad de carga ρ es un escalar, el campo eléctrico E y la corriente j son vectores,pero el campo magnético B es un vector axial. Sin embargo, las ecuaciones de Maxwell son invariantes ante laparidad porque la curva del vector axial es un vector.Respecto al comportamiento bajo inversión espacial, las variables de la mecánica clásica pueden ser clasificadas enmagnitudes pares y magnitudes impares.
Magnitudes paresLas variables clásicas que no cambian bajo inversión espacial incluyen:
, el tiempo cuando ocurre el evento, la energía de la partícula, Potencia (tasa del trabajo realizado), el momento angular de una partícula (ambos, el orbital y el spín), la densidad de carga eléctrica, el potencial eléctrico (voltaje), la inducción magnética, el campo magnético, la magnetización
la densidad de energía del campo electromagnético
tensor de Maxwelltodas las masas, cargas, constantes de acoplamiento y otras constantes físicas excepto las asociadas con lafuerza débil.
Magnitudes imparesVariables clásicas que han invertido su signo por una inversión espacial, incluyen:
, la posición de una partícula en el espacio tridimensional, la velocidad de una partícula, la aceleración de una partícula, el momento lineal de una partícula, la fuerza de una partícula, la densidad de corriente eléctrica, el campo eléctrico, el desplazamiento eléctrico
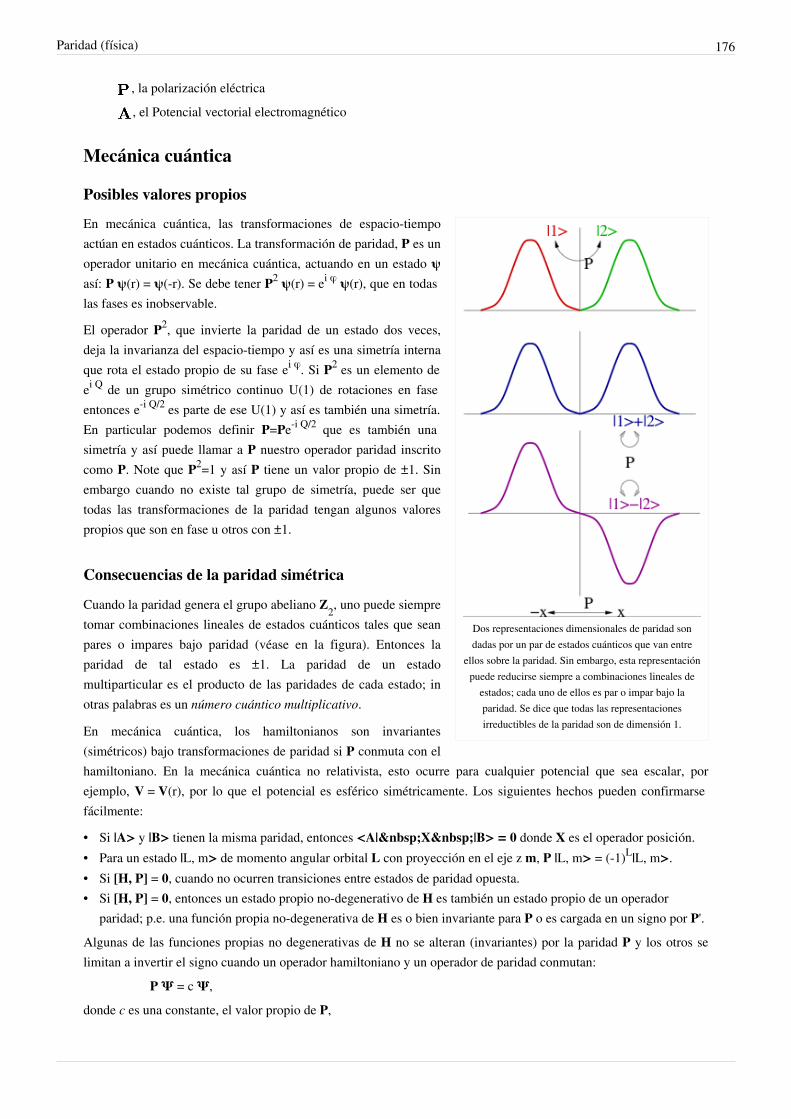
Paridad (física) 176
, la polarización eléctrica, el Potencial vectorial electromagnético
Mecánica cuántica
Posibles valores propios
Dos representaciones dimensionales de paridad sondadas por un par de estados cuánticos que van entre
ellos sobre la paridad. Sin embargo, esta representaciónpuede reducirse siempre a combinaciones lineales de
estados; cada uno de ellos es par o impar bajo laparidad. Se dice que todas las representacionesirreductibles de la paridad son de dimensión 1.
En mecánica cuántica, las transformaciones de espacio-tiempoactúan en estados cuánticos. La transformación de paridad, P es unoperador unitario en mecánica cuántica, actuando en un estado ψasí: P ψ(r) = ψ(-r). Se debe tener P2 ψ(r) = ei φ ψ(r), que en todaslas fases es inobservable.
El operador P2, que invierte la paridad de un estado dos veces,deja la invarianza del espacio-tiempo y así es una simetría internaque rota el estado propio de su fase ei φ. Si P2 es un elemento deei Q de un grupo simétrico continuo U(1) de rotaciones en faseentonces e-i Q/2 es parte de ese U(1) y así es también una simetría.En particular podemos definir P=Pe-i Q/2 que es también unasimetría y así puede llamar a P nuestro operador paridad inscritocomo P. Note que P2=1 y así P tiene un valor propio de ±1. Sinembargo cuando no existe tal grupo de simetría, puede ser quetodas las transformaciones de la paridad tengan algunos valorespropios que son en fase u otros con ±1.
Consecuencias de la paridad simétrica
Cuando la paridad genera el grupo abeliano Z2, uno puede siempretomar combinaciones lineales de estados cuánticos tales que seanpares o impares bajo paridad (véase en la figura). Entonces laparidad de tal estado es ±1. La paridad de un estadomultiparticular es el producto de las paridades de cada estado; inotras palabras es un número cuántico multiplicativo.
En mecánica cuántica, los hamiltonianos son invariantes(simétricos) bajo transformaciones de paridad si P conmuta con elhamiltoniano. En la mecánica cuántica no relativista, esto ocurre para cualquier potencial que sea escalar, porejemplo, V = V(r), por lo que el potencial es esférico simétricamente. Los siguientes hechos pueden confirmarsefácilmente:
• Si |A> y |B> tienen la misma paridad, entonces <A| X |B> = 0 donde X es el operador posición.• Para un estado |L, m> de momento angular orbital L con proyección en el eje z m, P |L, m> = (-1)L|L, m>.• Si [H, P] = 0, cuando no ocurren transiciones entre estados de paridad opuesta.• Si [H, P] = 0, entonces un estado propio no-degenerativo de H es también un estado propio de un operador
paridad; p.e. una función propia no-degenerativa de H es o bien invariante para P o es cargada en un signo por P'.Algunas de las funciones propias no degenerativas de H no se alteran (invariantes) por la paridad P y los otros selimitan a invertir el signo cuando un operador hamiltoniano y un operador de paridad conmutan:
P Ψ = c Ψ,donde c es una constante, el valor propio de P,

Paridad (física) 177
P P Ψ = P c Ψ.
Teoría cuántica de camposLa paridad intrínseca asignada en esta sección son verdaderos para la mecánica cuántica relativista comouna teoría cuántica de campos.
Si es posible demostrar que el estado de vacío es invariante bajo paridad (P |0> = |0>), el hamiltoniano es invariantede paridad ([H, P] = 0) y las condiciones de cuantización se mantienen sin cambio bajo la paridad, entonces de ellose desprende que cada estado tiene una buena paridad y esa paridad se conserva en cualquier reacción.Para mostrar que la electrodinámica cuántica es invariante bajo paridad, es necesario probar que la acción esinvariante y la cuantización es también invariante. Por simplicidad se asumirá que se utiliza la cuantizacióncanónica; el estado de vacío es el invariante bajo paridad por ecuaciones. La invarianza de la acción continua desdela invarianza clásica de Maxwell depende de la transformación del operador aniquilación:
P a(p,±) P+ = -a(-p,±)donde p denota el momento de un fotón y ± se refiere a su estado de polarización. Este es equivalente a laafirmación de que el fotón tiene paridad intrínseca impar. De la misma manera, todos los bosones vectoriales puedenmostrarse como paridad intrínseca impar, y todo vector axial tiene paridad par intrínseca.Hay una sencilla extensión de estos argumentos en teoría de campos escalares que muestra que los escalares tienenparidad par, así:
P a(p) P+ = a(-p).Esto es verdad para campos escalares complejos. (Los detalles de espinoriales se describen más ampliamente en elartículo de la ecuación de Dirac, donde se muestra que los fermiones y antifermiones tienen paridad intrínsecaopuesta.). Con los fermiones hay una complicación simple porque hay más de un grupo de pin.
Paridad en el modelo estándar
Fijación de las simetrías globalesEn el modelo estándar de las interacciones fundamentales hay precisamente tres grupos de simetría global internaU(1) disponible, con cargas igual al número bariónico B, el número de leptones L y la carga eléctrica Q. El productodel operador paridad con cualquier combinación de esas rotaciones es otro operador paridad. Es una convención elhecho de buscar una combinación específica de esas rotaciones para definir a un operador estándar de paridad, yotros operadores de paridad se relacionan con el estándar uno por rotaciones internas. Una manera de fijar unoperador de paridad estándar consiste en asignar las paridades de tres partículas con cargas B, L y Q linealmenteindependientes. En general, se asigna la paridad de las partículas masivas más comunes: el protón, el neutrón y elelectrón como +1.Steven Weinberg mostró que si P2=(-1)F, donde F es el operador del número fermión, entonces si el número fermiónes la suma del número leptón más el número barión, F=B+L, para todas las partículas en el modelo estándar y así elnúmero leptón y el número barión son cargas Q de simetría continua ei Q, es posible redefinir el operador paridad deesta manera P2=1. Sin embargo, si hay un neutrino majorana, en cuya existencia creen los investigadores, entoncessu número fermión sería igual al de Majorana, y así (-1)f podría no estar unido con un grupo de simetría continuo.Los neutrinos de Majorana deberían tener paridad ±i.

Paridad (física) 178
Paridad del pionEn un artículo de 1954 Absorption of negative pions in deuterium: Parity of the pion (Absorción de piones negativosen el deuterio: Paridad del pion [1], de William Chinowsky y Jack Steinberger, se demostró que el pion π tieneparidad negativa. Estos investigadores estudiaron que la desintegración de un átomo hace que un núcleo de deuteriod y un pion π- cargado negativamente alcancen un estado con momento angular orbital cero L=0 en dos neutrones n
Los neutrones son fermiones y por lo tanto obedecen a las estadísticas de Fermi, que implican que el estado final esantisimétrico. Usando el hecho de que el deuterón tiene com spín uno y el pion cero, juntos con la antisimetría delestado final, concluyen que los dos neutrones deben tener momento angular orbital L = 1. La paridad total es elproducto de la paridad intrínseca de partículas y la paridad extrinseca (-1)L. Así, el momento orbital cambia de cero auno en el proceso; si el proceso es para conservar la paridad total, entonces el producto de las paridades intrínsecasde las partículas iniciales y finales debe tener signo opuesto. Un núcleo de deuterio está compuesto de un protón y unneutrón, y usando la convención antes mencionada de que protones y neutrones tienen paridad intrínseca igual a +1,se argumentó que la paridad del pion es igual a menos el producto de las partículas de dos neutrones dividido por elprotón y el neutrón en el deuterio, (-1)(1)2/(1)2, que es igual a menos 1. Así, se concluye que el pion es una partículaseudo escalar.
Violación de paridad y simetría PLa paridad se conserva en electromagnetismo, interacción fuerte y gravitación, y se la viola en la interacción débil.Por esa razón se afirma que las tres primeras son interacciones con simetría P. La falta de simetría P o violación dela paridad se incorpora en el modelo estándar al expresar a la interacción débil como la interacción quiral de gauge.Solo los componentes zurdos de las partículas y los componentes diestros de las antipartículas participan en lainteracción débil en el modelo estándar. Esto implica que la paridad no es simétrica en nuestro universo, a menos quela antimateria exista en esta paridad que se violaría en otro sentido.La historia de los descubrimientos de la violación de la paridad es interesante. Se sugirió muchas veces y endiferentes contextos que la paridad podría no conservarse, pero en la ausencia de evidencia concreta nunca se lostomo en serio. Una revisión cuidadosa de los físicos teóricos Tsung-Dao Lee y Chen Ning Yang fue más allá,mostrando que mientras la conservación de la paridad ha sido verificada en decaimientos de la fuerza fuerte o de lainteracción electromagnética, no fue probada en la interacción débil. Ellos propusieron muchos posiblesexperimentos directos, los cuales fueron casi en su totalidad ignorados, pero Lee fue capaz de convencer a sucolleague de Columbia en probarlos. Ella necesitaba facilidades especiales de criogenia y experiencia, esta fue dadapor el Bureau Nacional de Estándares.En 1956-1957 Wu, E. Ambler, R. W. Hayward, D. D. Hoppes, y R. P. Hudson encontraron una clara violación de laconservación de la paridad en la desintegración beta de Cobalto-60. Como el experimento fue terminado con undoble chequeo en progreso, Wu informó a sus colegas de Columbia sobre sus resultados positivos. Tres de ellos, R.L. Garwin, Leon Lederman, y R. Weinrich modificaron el experimento en el ciclotrón e inmediatamente verificaronla violación de la paridad. La publicación se retrasó hasta que el grupo de Wu estuviera listo, los dos papelesaparecieron uno detrás del otro.Después de ese hecho, se notó que un oscuro experimento de 1928 tenía en efecto reportes de la violación de laparidad en desintegraciones débiles pero como el concepto apropiado no había sido inventado aún, no tuvo impacto.El descubrimiento de la violación de la paridad explicó inmediatamente el enigma τ-θ en la física del kaón.

Paridad (física) 179
Paridad intrínseca de los hadronesA cada partícula uno puede asignar una paridad intrínseca cuan grande como su naturaleza preserve la paridad. Porlo tanto la interacción débil no lo hace, se puede aun asignar una paridad a cualquier hadrón al examinar la reacciónde una interacción fuerte que la produce o a través de desintegraciones que envuelven a la interacción débil, tal como
π0 → γγ.
Referencias•• CP violation, by I.I. Bigi and A.I. Sanda (ISBN 0-521-44349-0)
Referencias[1] http:/ / prola. aps. org/ abstract/ PR/ v95/ i6/ p1561_1
Ortogonalidad (matemáticas)En matemáticas, el término ortogonalidad (del griego orthos —recto— y gonía —ángulo—) es una generalizaciónde la noción geométrica de perpendicularidad. En el espacio euclídeo convencional el término ortogonal y el términoperpendicular son sinónimos. Sin embargo, en espacios de dimensión finita y en geometrías no euclídeas el conceptode ortogonalidad generaliza al de perpendicularidad.
Ortogonalidad en espacios vectoriales
Definición
Formalmente, en un espacio vectorial con producto interior V, dos vectores e son ortogonales si elproducto escalar de es cero. Esta situación se denota . Además, un conjunto A se dice que esortogonal a otro conjunto B, si cualquiera de los vectores de A es ortogonal a cualquiera de los vectores del conjuntoB.
Ortogonalidad y perpendicularidad
En geometría euclídea se tiene, dos vectores e ortogonales forman un ángulo recto, los vectores y lo son ya que, . En espacios no euclídeospuede definirse de modo abstracto el ángulo entre dos vectores a partir del producto interior.
Ortogonalidad respecto de una matriz (A-ortogonalidad)Dados dos vectores y pertenecientes a un espacio vectorial de dimensión y una matriz de dimensión
, si el productor escalar , notado , es igual a cero, se dice que y sonortogonales respecto a la matriz o A-ortogonales. Un conjunto de vectores se dice que forma unabase A-ortonormal si para todo .

Ortogonalidad (matemáticas) 180
Transformación ortogonalEn Geometría y Álgebra lineal, una transformación de un espacio prehilbertiano en símismo —donde representa el producto escalar en — es ortogonal cuando es una aplicación lineal de
en sí mismo (un automorfismo) de forma que cualesquiera que sean los se cumple que.
En particular, el conjunto puede ser un espacio euclídeo.En caso de que sea un espacio vectorial sobre el cuerpo de los números complejos, se dirá que estransformación unitaria.
Ortogonalidad en otros contextosEl concepto de ortogonalidad puede extenderse a otros objetos geométricos diferente de los vectores. Por ejemplodos curvas suaves se consideran ortogonales en un punto si sus respectivos vectores tangentes son ortogonales. Dosfamilias de curvas se llaman ortogonales si en el punto de intersección de una curva de la primera familia con unacurva de la segunda familia ambas resultan ser ortogonales. Un ejemplo de esto es el de las líneas isostáticas detracción y compresión en una viga, las cuales son las envolventes de las tensiones principales.
Sistemas de coordenadas ortogonalesUn sistema de coordenadas sobre una variedad de Riemann o un espacio localmente euclídeo es ortogonal cuandolas líneas coordenadas asociadas a los valores constantes de alguna de las coordenadas tienen vectores tangentes queson ortogonales entre sí. Las coordenadas cartesianas, las coordenadas cilíndricas y las coordenadas esféricas sonejemplos de sistemas de coordenadas ortogonales.Los sistemas de coordenadas ortogonales son interesantes porque el tensor métrico expresado en ese sistema decoordenadas es diagonal. Si además todos los términos del tensor métrico son +1 (o también -1 si estamos en unaVariedad pseudoriemanniana) el sistema de coordendas se califica además de ortonormal.Los sistemas de coordenadas ortogonales las líneas coordenadas forman familias de curvas ortogonales entre sí.
ReferenciasWeisstein, Eric W. «Ortogonal [1]» (en inglés). MathWorld. Wolfram Research.
Referencias[1] http:/ / mathworld. wolfram. com/ Orthogonal. html

Cuaterniones y rotación en el espacio 181
Cuaterniones y rotación en el espacioLos cuaterniones unitarios proporcionan una notación matemática para representar las orientaciones y las rotacionesde objetos en tres dimensiones. Comparados con los ángulos de Euler, son más simples de componer y evitan elproblema del bloqueo del cardán. Comparados con las matrices de rotación, son más eficientes y más establesnuméricamente. Los cuarteniones son útiles en aplicaciones de gráficos por computadora, robótica, navegación ymecánica orbital de satélites.
IntroducciónSe recuerda la versión geométrica del producto de dos cuaterniones, q = (a, u) y q´= (a', u'), donde a y a´ son laspartes reales, u y u´ son las partes imaginarias, también vistas como vectores del espacio tridimensional R 3 : q.q' =(aa' - u·u', au' + a'u + u×u'). u·u´ designa el producto escalar, y u×u´ el producto vectorial. Notaremos q~ el cuaterniónconjugado de q: q~ = (a, -u).Para permanecer en el espacio tridimensional, hace falta hacer desaparecer las partes reales. Tomemos a = a´= 0.Entonces q. q´ = (0, u)(0, u') = ( - u·u', u×u´ ).Bien es sabido que el producto vectorial está relacionado con la rotación en el espacio. Por lo tanto, a base deproductos, debe ser posible expresar cualquier rotación tridimensional. El objetivo es obtener una fórmula parecida ala expresión compleja de la rotación en el plano:z´= wz, con w = e iθ cuando se gira alrededor del origen, y z´ = w(z-c) + c si se rota alrededor del punto c.
Descubriendo la fórmulaTomemos el ejemplo más sencillo: ¿Cómo expresar analíticamente la rotación alrededor de eje de los conun ángulo de 90 grados?El vector i debe tener un papel. Miremos a la multiplicación por i por la izquierda: (como i×j =k) e
(como i×k =-j).Parece por lo tanto que la función f: q → iq es la respuesta a la pregunta. En el plano (j, k) esa función rota de 90grados. ¿Pero qué pasa en el resto del espacio? , y . Por linealidad, nos damos cuentaque hace girar el plano (1, i) de 90 grados también, y esto ¡no lo queremos! El punto i tiene que permanecer inmóvil,y la función f no tiene que enviar ni un punto del espacio usual en la cuarta dimensión (aquí, en1R).Como sabemos que la multiplicación no es conmutativa en H, cuerpo de los cuaterniones, miremos al producto porla derecha, por i:
g : q → qi. ; lo que corresponde a la rotación inversa en el plano (j, k). Perog(1) = i y g(i) = - 1 da la misma rotación parásita que f sobre (i,j). Si tomamos la función opuesta (e inversa) : h = -g: q → -qi = q(-i) nos damos cuenta que h tiene la misma acción sobre el plano (j, k) que f pero la acción opuestasobre (1, i). Entonces f y h se compensan en (1, i), pero se acumulan en (j,k), y la función compuesta: m = foh(=hof): q → iq(-i) deja el plano (1, i) quieto, pero gira el plano (j, k) dos veces de 90 grados, o sea de 180 grados:
y Hemos obtenido por lo tanto una rotación alrededor de eje (O,i), pero con un ángulo doble de lo deseado. Basta condividir los ángulos de f e h por dos para obtener la fórmula.
El número que corresponde al medio ángulo es

Cuaterniones y rotación en el espacio 182
y la función que realiza la rotación pedida es r: q → wqw~.Este raciocinio se generaliza a cualquier eje de rotación, y no soló a los tres ejes (O,i) (O, j) y (O, k). Si se quieregirar alrededor del eje (O,u) donde u es un vector unitario, hay que considerar el plano (1, u) y otro planoperpendicular (ortogonal) en H, y emplear el número:
La fórmulaSea q = xi + yj + zk un punto (o un vector) del espacio, u un vector unitario del mismo espacio y θ un real. Larotación alrededor del eje (0,u) de un ángulo θ envía el punto q sobre el punto q' = a'i + b'j + c'k dado por la fórmula:
q´= h·q·h~donde h = cos(θ/2) + u·sin(θ/2)
Para obtener la rotación alrededor de un eje (c,u), donde c es un punto cualquiera del espacio, basta con componer lafunción anterior por dos translaciones:
q´ = h·(q-c)·h~ + c
Note que h es un cuaternión unitario, como en el caso de los complejos.La fórmula resulta algo más complicada que en el plano complejo porque trabajamos en cuatro dimensiones con loscuaterniones pero queremos permanecer en el espacio usual de tres dimensiones. Una simple multiplicación, a laizquierda o a la derecha, daría dos rotaciones simultáneas en dos planos perpendiculares (ortogonales) en el espaciotetradimensional.
EjemploConsideremos la rotación alrededor del eje (O, i + j + k), con un ángulo de 120º o sea 2π/3 radianes. Nosproponemos calcular la imagen del vector j. Puesto que el vector i + j + k no es de unitario, lo dividiremos por sunorma, con lo que obtenemos el siguiente vector unitario: u = ( i + j + k)/√3.El medio ángulo es π/3, por lo tanto
y su conjugado es
h~ =
El vector (o punto correspondiente) j será enviado en hjh~.
hjh~ =
y, distribuyendo los factores, hallamos:hjh~ =
Del mismo modo hallaríamos que hkh~ = i e hih~ = j, lo que da la expresión analítica de la rotación:

Cuaterniones y rotación en el espacio 183
Referencias• Torres del Castillo, G. F. (1999). Universidad Autónoma de Puebla, Instituto de Ciencias, Departamento de Física
Matemática (ed.): «La representación de rotaciones mediante cuaterniones. [1]» (en español) (pdf). MisceláneaMatemática 29. Consultado el 4 de mayo de 2012.
Referencias[1] http:/ / www. miscelaneamatematica. org/ Misc29/ torres_c. pdf
CuaterniónLos cuaterniones (también llamados cuaternios) son una extensión de los números reales, similar a la de losnúmeros complejos. Mientras que los números complejos son una extensión de los reales por la adición de la unidadimaginaria i, tal que , los cuaterniones son una extensión generada de manera análoga añadiendo lasunidades imaginarias: i, j y k a los números reales y tal que . Esto se puede resumiren esta tabla de multiplicación: la Tabla de Cayley (inglés).
1 i j k
1 1 i j k
i i -1 k -j
j j -k -1 i
k k j -i -1
1, i, j, k, son entonces las "bases" de las componentes de un cuaternión.
Representaciones de los cuaterniones
VectorialUn cuaternión puede expresarse como el conjunto:
o equivalentemente:
Entonces un cuaternión es un número de la forma a + bi + cj + dk, donde a, b, c, y d son números realesunívocamente determinados por cada cuaternión.Análogamente, un cuaternión puede expresarse como el producto interno (componente a componente) de dosvectores, de los cuales uno es el de las componentes , y el otro el de las "bases":
. En este caso, el elemento a1 que forma la componente real se anota aparte, y para el productointerno se consideran solamente las tres bases i, j, k:
Esta representación tiene algunas ventajas que pueden ser vistas en algunas operaciones como el producto decuaterniones.

Cuaternión 184
MatricialAdemás hay, al menos, dos formas, isomorfismos, para representar cuaterniones con matrices. Así el cuaternión
se puede representar:•• Usando matrices complejas de 2x2:
Donde el conjunto de todas las matrices anteriores se designa mediante . Cuyo subconjunto SU(2), loscuatenios unitarios, juegan un papel importante en la teoría de gauge y de donde es fácil ver que eldeterminante es igual a . Una propiedad interesante de esta representación esque todos los números complejos son matrices que sólo tienen componentes reales.
•• Usando matrices reales de 4x4:
También en este caso el determinante de la matriz resulta igual a
Aritmética básica de cuaternionesDefinimos la suma y producto entre cuaternios mediante la aritmética usual de las matrices y de los númeroscomplejos. Puede comprobarse que el conjunto , junto con estas operaciones, satisface todas las propiedades deun campo con excepción del producto que no es conmutativo.
AdiciónLa adición se realiza análogamente a como se hace con los complejos, es decir: término a término:
ProductoEl producto se realiza componente a componente, y está dado en su forma completa por:
Una forma ligeramente más reducida puede ser:
El producto entre cuaterniones es asociativo y no es conmutativo.

Cuaternión 185
Conjugación
• El conjugado de un cuaternión está dado por .En otras palabras, el conjugado invierte el signo de los componentes "agregados" del cuaternión. Matricialmenteesto corresponderá a la operación de transposición de cualquiera de sus representaciones matriciales.
• La medida o valor absoluto de un cuaternión x está dado por:
Matricialmente, esta medida coincide con la raíz cuadrada del
determinante de la matiz que representa al cuaternión. Esta medida cumple una propiedad similar al módulo de unnúmero complejo: |zw| = |w| |z| para cualesquiera cuaterniones z y w.Usando como norma el valor absoluto, los cuateriones conforman un álgebra de Banach real.
CocienteUsando la forma del inverso, es posible escribir el cociente de dos cuaterniones como:
El inverso multiplicativo de un cuaternión x, distinto de cero, está dado por:
. El cual es mismo patrón que cumplen los números complejos.
ExponenciaciónLa exponenciación de números cuaterniónicos, al igual que sucede con los números complejos, está relacionada confunciones trigonométricas. Dado un cuaternión escrito en forma canónica q = a + bi + cj + dk su exponenciaciónresulta ser:
Comparación con matricesLa multiplicación de matrices no es, en general, conmutativa al igual que en el caso de los cuaterniones. Sinembargo, tampoco todas las matrices poseen un inverso multiplicativo mientras que todos los cuaternios diferentesdel cero si son invertibles.
Detalles algebraicosLos cuaterniones son un ejemplo de cuerpo asimétrico (a veces llamado anillo con división), una estructuraalgebraica parecida a un cuerpo pero no conmutativo en la multiplicación, es decir: satisfacen todas las propiedadesde un cuerpo con excepción de que el producto no es conmutativo. La multiplicación es asociativa y todo cuaterniónno nulo posee un único inverso. Forman una -álgebra asociativa 4-dimensional sobre los reales y los complejosforman un subconjunto de ella, los cuaterniones no forman un álgebra asociativa sobre los complejos.
Usando la función distancia definida como = |z - w|, los cuaterniones forman un espacio métrico y todas lasoperaciones aritméticas son continuas.El conjunto de los cuaterniones de valor absoluto 1 forman una esfera 3-dimensional S³ y un grupo (incluso grupo deLie) con la multiplicación. Este grupo actúa, mediante conjugación, sobre la copia de R³ constituida por loscuaterniones cuya parte real es cero. No es difícil comprobar que la conjugación por un cuaternión unidad de partereal cos t es una rotación de ángulo 2t con el eje de giro en la dirección de la parte imaginaria.
Cuaternión 186
Así, S³ constituye un recubrimiento doble del grupo SO(3) de matrices ortogonales 3x3 de determinante 1; esisomorfo a SU(2), el grupo de matrices 2x2 complejas unitarias y de determinante unidad.Sea A el conjunto de cuaterniones de la forma a + bi + cj + dk donde a, b, c y d son, o todos enteros o todosracionales con numerador impar y denominador 2. El conjunto A es un anillo y un retículo. Hay 24 cuaternionesunitarios en este anillo y son los vértices de un politopo regular, llamado 3,4,3 en la notación de Schlafli.
Clasificación en el álgebra abstracta
Un conjunto que posee todas las propiedades de un campo excepto por se conoce como un anillo con división oun campo asimétrico. La construcción de los cuaternios por Hamilton fue el primer ejemplo de este tipo deestructura. La existencia del inverso multiplicativo de un cuaternion no nulo puede comprobarse de manerasemejante a como se realiza para los complejos como sigue. Recordemos que para cualquier número complejo z = a+ bi se define su norma como la raíz cuadrada de y su conjugado como z = a - bi. Tenemos entonces querecordemos que el cuaternio h = a + bI + cJ + dK puede pensarse como la matriz compleja.
AplicacionesLos cuaterniones no son únicamente una curiosidad algebraica. Tienen diversas aplicaciones que van desde la teoríade números, en donde pueden utilizarse para probar resultados como el teorema dado por Lagrange que dice quetodo número natural n puede expresarse como la suma de cuatro cuadrados perfectos, hasta aplicaciones físicasdentro del electromagnetismo, teoría de la relatividad y mecánica cuántica, entre otras.Los cuaterniones en física representan rotaciones en el espacio, véase cuaterniones y rotación en el espacio. Ademástienen aplicaciones en el electromagnetismo y la mecánica cuántica.Los cuaterniones se utilizan a menudo en gráficos por computadora (y en el análisis geométrico asociado) pararepresentar la orientación de un objeto en un espacio tridimensional. Las ventajas son: conforman una representaciónno singular (comparada con, por ejemplo, los ángulos de Euler), más compacta y más rápida que las matrices.
Historia
Placa conmemorativa en el puente de Brougham(Broom), Dublín, con el texto:"Here as he walked
by on the 16th of October 1843 Sir WilliamRowan Hamilton in a flash of genius discovered
the fundamental formula for quaternionmultiplicationi² = j² = k² = ijk = −1"
Los cuaterniones fueron creados por William Rowan Hamilton en1843. Hamilton buscaba formas de extender los números complejos(que pueden interpretarse como puntos en un plano) a un númeromayor de dimensiones. No pudo hacerlo para 3 dimensiones, pero para4 dimensiones obtuvo los cuaterniones. Según una historia relatadapor el propio Hamilton, la solución al problema que le ocupaba lesobrevino un día que estaba paseando con su esposa, bajo la forma dela ecuación: i² = j² = k² = ijk = -1. Inmediatamente, grabó estaexpresión en el lateral del puente de Brougham [1], que estaba muycerca del lugar.
Hamilton popularizó los cuaterniones con varios libros, el último de loscuales, Elements of Quaternions (en inglés Elementos deCuaterniones), tenía 800 páginas y fue publicado poco después de sumuerte.
Generalizaciones

Cuaternión 187
Si F es un cuerpo cualquiera y a y b son elementos de F, se puede definir un álgebra asociativa unitaria de cuatrodimensiones sobre F utilizando dos generadores, i y j, y las relaciones i² = a, j² = b e ij = -ji. Estas álgebras, o sonisomorfas al álgebra de matrices 2x2 sobre F, o son álgebras de división sobre F, y se denominan álgebras decuaterniones.
Referencia[1] http:/ / en. wikipedia. org/ wiki/ Broom_Bridge
Bibliografía• Hamilton, William Rowan. On quaternions, or on a new system of imaginaries in algebra (http:/ / www. emis.
ams. org/ classics/ Hamilton/ OnQuat. pdf). Philosophical Magazine. Vol. 25, n 3. p. 489–495. 1844.• Hamilton, William Rowan (1853), " Lectures on Quaternions (http:/ / historical. library. cornell. edu/ cgi-bin/ cul.
math/ docviewer?did=05230001& seq=9)". Royal Irish Academy.• Hamilton (1866) Elements of Quaternions (http:/ / books. google. com/ books?id=fIRAAAAAIAAJ) University
of Dublin Press. Edited by William Edwin Hamilton, son of the deceased author.• Hamilton (1899) Elements of Quaternions volume I, (1901) volume II. Edited by Charles Jasper Joly; published
by Longmans, Green & Co..• Tait, Peter Guthrie (1873), "An elementary treatise on quaternions". 2d ed., Cambridge, [Eng.] : The University
Press.• Michiel Hazewinkel, Nadiya Gubareni, Nadezhda Mikhaĭlovna Gubareni, Vladimir V. Kirichenko. Algebras,
rings and modules. Volume 1. 2004. Springer, 2004. ISBN 1-4020-2690-0• Maxwell, James Clerk (1873), "A Treatise on Electricity and Magnetism". Clarendon Press, Oxford.• Tait, Peter Guthrie (1886), " Quaternion (http:/ / www. ugcs. caltech. edu/ ~presto/ papers/
Quaternions-Britannica. ps. bz2)". M.A. Sec. R.S.E. Encyclopaedia Britannica, Ninth Edition, 1886, Vol. XX,pp. 160–164. (bzipped PostScript file)
• Joly, Charles Jasper (1905), "A manual of quaternions". London, Macmillan and co., limited; New York, TheMacmillan company. LCCN 05036137 //r84
• Macfarlane, Alexander (1906), "Vector analysis and quaternions", 4th ed. 1st thousand. New York, J. Wiley &Sons; [etc., etc.]. LCCN es 16000048
• 1911 encyclopedia: " Quaternions (http:/ / www. 1911encyclopedia. org/ Quaternions)".• Finkelstein, David, Josef M. Jauch, Samuel Schiminovich, and David Speiser (1962), "Foundations of quaternion
quantum mechanics". J. Mathematical Phys. 3, pp. 207–220, MathSciNet.• Du Val, Patrick (1964), "Homographies, quaternions, and rotations". Oxford, Clarendon Press (Oxford
mathematical monographs). LCCN 64056979 //r81• Crowe, Michael J. (1967), A History of Vector Analysis: The Evolution of the Idea of a Vectorial System,
University of Notre Dame Press. Surveys the major and minor vector systems of the 19th century (Hamilton,Möbius, Bellavitis, Clifford, Grassmann, Tait, Peirce, Maxwell, Macfarlane, MacAuley, Gibbs, Heaviside).
• Altmann, Simon L. (1986), "Rotations, quaternions, and double groups". Oxford [Oxfordshire] : Clarendon Press; New York : Oxford University Press. LCCN 85013615 ISBN 0-19-855372-2
• Altmann, Simon L. (1989), "Hamilton, Rodrigues, and the Quaternion Scandal". Mathematics Magazine. Vol. 62,No. 5. p. 291–308, Dec. 1989.
• Adler, Stephen L. (1995), "Quaternionic quantum mechanics and quantum fields". New York : Oxford UniversityPress. International series of monographs on physics (Oxford, England) 88. LCCN 94006306 ISBN0-19-506643-X
• Trifonov, Vladimir (http:/ / members. cox. net/ vtrifonov/ ) (1995), "A Linear Solution of the Four-DimensionalityProblem", Europhysics Letters, 32 (8) 621–626, DOI: 10.1209/0295-5075/32/8/001 (http:/ / dx. doi. org/ 10.1209/ 0295-5075/ 32/ 8/ 001)
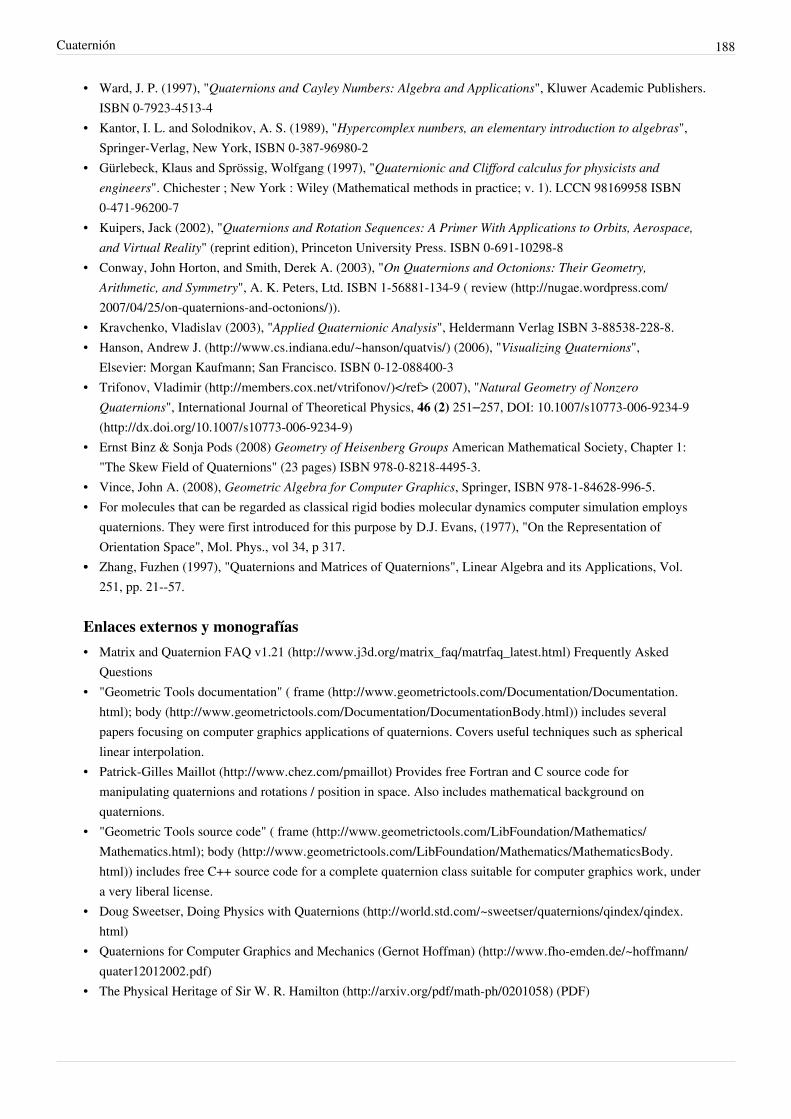
Cuaternión 188
• Ward, J. P. (1997), "Quaternions and Cayley Numbers: Algebra and Applications", Kluwer Academic Publishers.ISBN 0-7923-4513-4
• Kantor, I. L. and Solodnikov, A. S. (1989), "Hypercomplex numbers, an elementary introduction to algebras",Springer-Verlag, New York, ISBN 0-387-96980-2
• Gürlebeck, Klaus and Sprössig, Wolfgang (1997), "Quaternionic and Clifford calculus for physicists andengineers". Chichester ; New York : Wiley (Mathematical methods in practice; v. 1). LCCN 98169958 ISBN0-471-96200-7
• Kuipers, Jack (2002), "Quaternions and Rotation Sequences: A Primer With Applications to Orbits, Aerospace,and Virtual Reality" (reprint edition), Princeton University Press. ISBN 0-691-10298-8
• Conway, John Horton, and Smith, Derek A. (2003), "On Quaternions and Octonions: Their Geometry,Arithmetic, and Symmetry", A. K. Peters, Ltd. ISBN 1-56881-134-9 ( review (http:/ / nugae. wordpress. com/2007/ 04/ 25/ on-quaternions-and-octonions/ )).
• Kravchenko, Vladislav (2003), "Applied Quaternionic Analysis", Heldermann Verlag ISBN 3-88538-228-8.• Hanson, Andrew J. (http:/ / www. cs. indiana. edu/ ~hanson/ quatvis/ ) (2006), "Visualizing Quaternions",
Elsevier: Morgan Kaufmann; San Francisco. ISBN 0-12-088400-3• Trifonov, Vladimir (http:/ / members. cox. net/ vtrifonov/ )</ref> (2007), "Natural Geometry of Nonzero
Quaternions", International Journal of Theoretical Physics, 46 (2) 251–257, DOI: 10.1007/s10773-006-9234-9(http:/ / dx. doi. org/ 10. 1007/ s10773-006-9234-9)
• Ernst Binz & Sonja Pods (2008) Geometry of Heisenberg Groups American Mathematical Society, Chapter 1:"The Skew Field of Quaternions" (23 pages) ISBN 978-0-8218-4495-3.
• Vince, John A. (2008), Geometric Algebra for Computer Graphics, Springer, ISBN 978-1-84628-996-5.• For molecules that can be regarded as classical rigid bodies molecular dynamics computer simulation employs
quaternions. They were first introduced for this purpose by D.J. Evans, (1977), "On the Representation ofOrientation Space", Mol. Phys., vol 34, p 317.
•• Zhang, Fuzhen (1997), "Quaternions and Matrices of Quaternions", Linear Algebra and its Applications, Vol.251, pp. 21--57.
Enlaces externos y monografías• Matrix and Quaternion FAQ v1.21 (http:/ / www. j3d. org/ matrix_faq/ matrfaq_latest. html) Frequently Asked
Questions• "Geometric Tools documentation" ( frame (http:/ / www. geometrictools. com/ Documentation/ Documentation.
html); body (http:/ / www. geometrictools. com/ Documentation/ DocumentationBody. html)) includes severalpapers focusing on computer graphics applications of quaternions. Covers useful techniques such as sphericallinear interpolation.
• Patrick-Gilles Maillot (http:/ / www. chez. com/ pmaillot) Provides free Fortran and C source code formanipulating quaternions and rotations / position in space. Also includes mathematical background onquaternions.
• "Geometric Tools source code" ( frame (http:/ / www. geometrictools. com/ LibFoundation/ Mathematics/Mathematics. html); body (http:/ / www. geometrictools. com/ LibFoundation/ Mathematics/ MathematicsBody.html)) includes free C++ source code for a complete quaternion class suitable for computer graphics work, undera very liberal license.
• Doug Sweetser, Doing Physics with Quaternions (http:/ / world. std. com/ ~sweetser/ quaternions/ qindex/ qindex.html)
• Quaternions for Computer Graphics and Mechanics (Gernot Hoffman) (http:/ / www. fho-emden. de/ ~hoffmann/quater12012002. pdf)
• The Physical Heritage of Sir W. R. Hamilton (http:/ / arxiv. org/ pdf/ math-ph/ 0201058) (PDF)
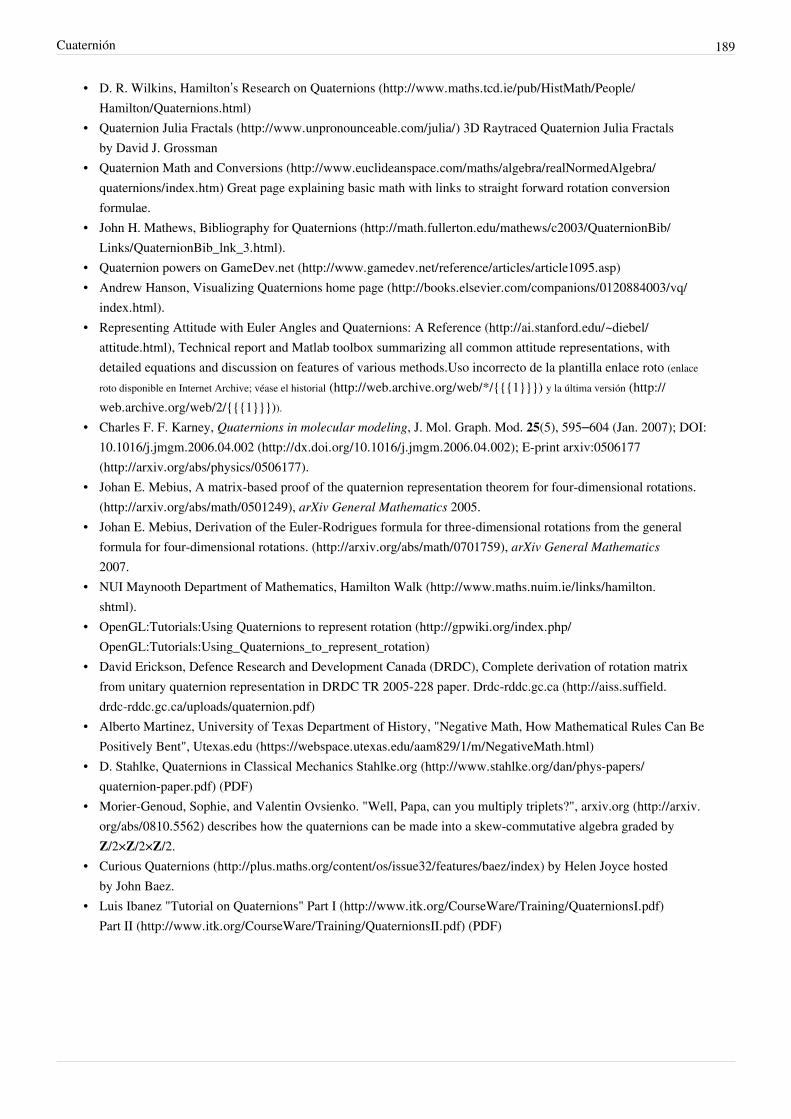
Cuaternión 189
• D. R. Wilkins, Hamilton’s Research on Quaternions (http:/ / www. maths. tcd. ie/ pub/ HistMath/ People/Hamilton/ Quaternions. html)
• Quaternion Julia Fractals (http:/ / www. unpronounceable. com/ julia/ ) 3D Raytraced Quaternion Julia Fractalsby David J. Grossman
• Quaternion Math and Conversions (http:/ / www. euclideanspace. com/ maths/ algebra/ realNormedAlgebra/quaternions/ index. htm) Great page explaining basic math with links to straight forward rotation conversionformulae.
• John H. Mathews, Bibliography for Quaternions (http:/ / math. fullerton. edu/ mathews/ c2003/ QuaternionBib/Links/ QuaternionBib_lnk_3. html).
• Quaternion powers on GameDev.net (http:/ / www. gamedev. net/ reference/ articles/ article1095. asp)• Andrew Hanson, Visualizing Quaternions home page (http:/ / books. elsevier. com/ companions/ 0120884003/ vq/
index. html).• Representing Attitude with Euler Angles and Quaternions: A Reference (http:/ / ai. stanford. edu/ ~diebel/
attitude. html), Technical report and Matlab toolbox summarizing all common attitude representations, withdetailed equations and discussion on features of various methods.Uso incorrecto de la plantilla enlace roto (enlace
roto disponible en Internet Archive; véase el historial (http:/ / web. archive. org/ web/ */ 1) y la última versión (http:/ /web. archive. org/ web/ 2/ 1)).
• Charles F. F. Karney, Quaternions in molecular modeling, J. Mol. Graph. Mod. 25(5), 595–604 (Jan. 2007); DOI:10.1016/j.jmgm.2006.04.002 (http:/ / dx. doi. org/ 10. 1016/ j. jmgm. 2006. 04. 002); E-print arxiv:0506177(http:/ / arxiv. org/ abs/ physics/ 0506177).
• Johan E. Mebius, A matrix-based proof of the quaternion representation theorem for four-dimensional rotations.(http:/ / arxiv. org/ abs/ math/ 0501249), arXiv General Mathematics 2005.
• Johan E. Mebius, Derivation of the Euler-Rodrigues formula for three-dimensional rotations from the generalformula for four-dimensional rotations. (http:/ / arxiv. org/ abs/ math/ 0701759), arXiv General Mathematics2007.
• NUI Maynooth Department of Mathematics, Hamilton Walk (http:/ / www. maths. nuim. ie/ links/ hamilton.shtml).
• OpenGL:Tutorials:Using Quaternions to represent rotation (http:/ / gpwiki. org/ index. php/OpenGL:Tutorials:Using_Quaternions_to_represent_rotation)
• David Erickson, Defence Research and Development Canada (DRDC), Complete derivation of rotation matrixfrom unitary quaternion representation in DRDC TR 2005-228 paper. Drdc-rddc.gc.ca (http:/ / aiss. suffield.drdc-rddc. gc. ca/ uploads/ quaternion. pdf)
• Alberto Martinez, University of Texas Department of History, "Negative Math, How Mathematical Rules Can BePositively Bent", Utexas.edu (https:/ / webspace. utexas. edu/ aam829/ 1/ m/ NegativeMath. html)
• D. Stahlke, Quaternions in Classical Mechanics Stahlke.org (http:/ / www. stahlke. org/ dan/ phys-papers/quaternion-paper. pdf) (PDF)
• Morier-Genoud, Sophie, and Valentin Ovsienko. "Well, Papa, can you multiply triplets?", arxiv.org (http:/ / arxiv.org/ abs/ 0810. 5562) describes how the quaternions can be made into a skew-commutative algebra graded byZ/2×Z/2×Z/2.
• Curious Quaternions (http:/ / plus. maths. org/ content/ os/ issue32/ features/ baez/ index) by Helen Joyce hostedby John Baez.
• Luis Ibanez "Tutorial on Quaternions" Part I (http:/ / www. itk. org/ CourseWare/ Training/ QuaternionsI. pdf)Part II (http:/ / www. itk. org/ CourseWare/ Training/ QuaternionsII. pdf) (PDF)
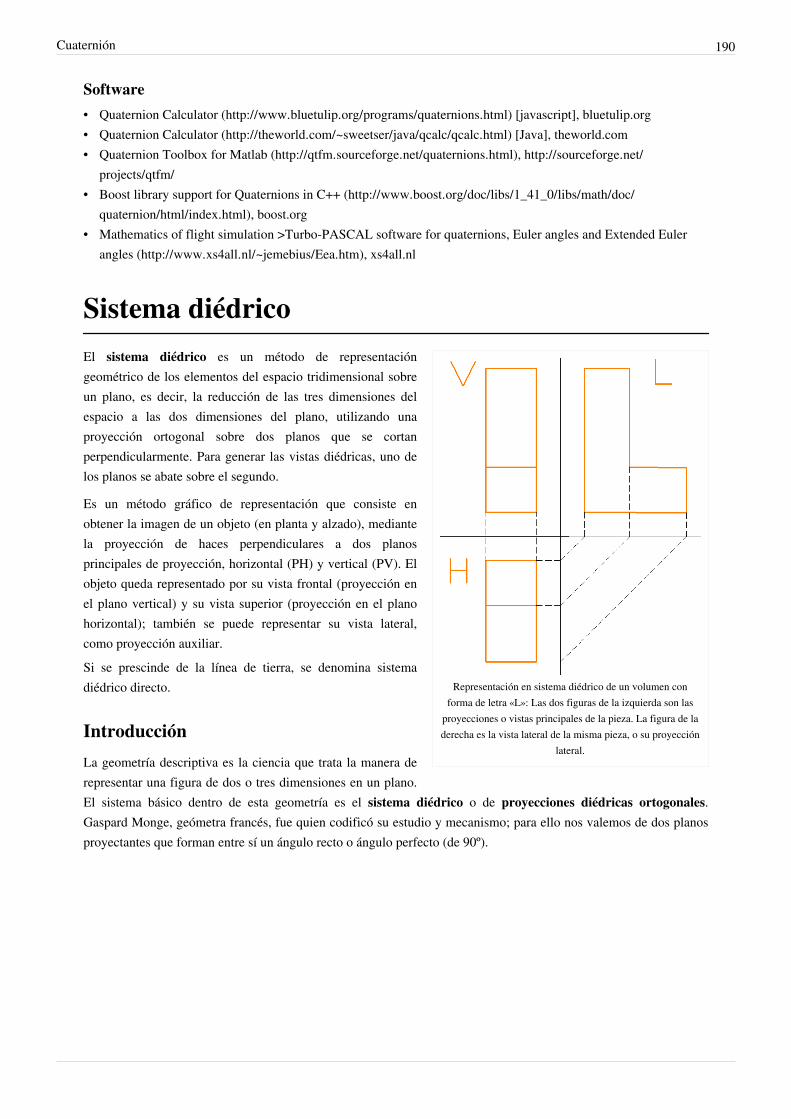
Cuaternión 190
Software• Quaternion Calculator (http:/ / www. bluetulip. org/ programs/ quaternions. html) [javascript], bluetulip.org• Quaternion Calculator (http:/ / theworld. com/ ~sweetser/ java/ qcalc/ qcalc. html) [Java], theworld.com• Quaternion Toolbox for Matlab (http:/ / qtfm. sourceforge. net/ quaternions. html), http:/ / sourceforge. net/
projects/ qtfm/• Boost library support for Quaternions in C++ (http:/ / www. boost. org/ doc/ libs/ 1_41_0/ libs/ math/ doc/
quaternion/ html/ index. html), boost.org• Mathematics of flight simulation >Turbo-PASCAL software for quaternions, Euler angles and Extended Euler
angles (http:/ / www. xs4all. nl/ ~jemebius/ Eea. htm), xs4all.nl
Sistema diédrico
Representación en sistema diédrico de un volumen conforma de letra «L»: Las dos figuras de la izquierda son las
proyecciones o vistas principales de la pieza. La figura de laderecha es la vista lateral de la misma pieza, o su proyección
lateral.
El sistema diédrico es un método de representacióngeométrico de los elementos del espacio tridimensional sobreun plano, es decir, la reducción de las tres dimensiones delespacio a las dos dimensiones del plano, utilizando unaproyección ortogonal sobre dos planos que se cortanperpendicularmente. Para generar las vistas diédricas, uno delos planos se abate sobre el segundo.
Es un método gráfico de representación que consiste enobtener la imagen de un objeto (en planta y alzado), mediantela proyección de haces perpendiculares a dos planosprincipales de proyección, horizontal (PH) y vertical (PV). Elobjeto queda representado por su vista frontal (proyección enel plano vertical) y su vista superior (proyección en el planohorizontal); también se puede representar su vista lateral,como proyección auxiliar.Si se prescinde de la línea de tierra, se denomina sistemadiédrico directo.
Introducción
La geometría descriptiva es la ciencia que trata la manera derepresentar una figura de dos o tres dimensiones en un plano.El sistema básico dentro de esta geometría es el sistema diédrico o de proyecciones diédricas ortogonales.Gaspard Monge, geómetra francés, fue quien codificó su estudio y mecanismo; para ello nos valemos de dos planosproyectantes que forman entre sí un ángulo recto o ángulo perfecto (de 90º).
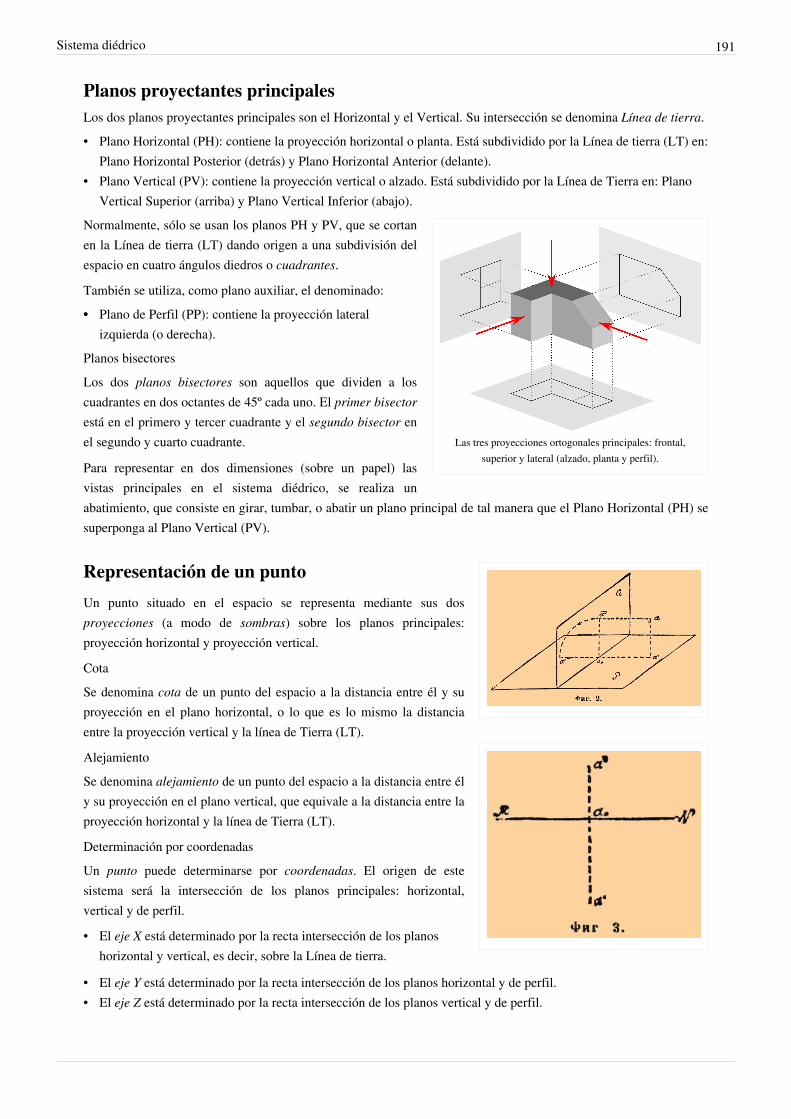
Sistema diédrico 191
Planos proyectantes principalesLos dos planos proyectantes principales son el Horizontal y el Vertical. Su intersección se denomina Línea de tierra.• Plano Horizontal (PH): contiene la proyección horizontal o planta. Está subdividido por la Línea de tierra (LT) en:
Plano Horizontal Posterior (detrás) y Plano Horizontal Anterior (delante).• Plano Vertical (PV): contiene la proyección vertical o alzado. Está subdividido por la Línea de Tierra en: Plano
Vertical Superior (arriba) y Plano Vertical Inferior (abajo).
Las tres proyecciones ortogonales principales: frontal,superior y lateral (alzado, planta y perfil).
Normalmente, sólo se usan los planos PH y PV, que se cortanen la Línea de tierra (LT) dando origen a una subdivisión delespacio en cuatro ángulos diedros o cuadrantes.
También se utiliza, como plano auxiliar, el denominado:•• Plano de Perfil (PP): contiene la proyección lateral
izquierda (o derecha).Planos bisectoresLos dos planos bisectores son aquellos que dividen a loscuadrantes en dos octantes de 45º cada uno. El primer bisectorestá en el primero y tercer cuadrante y el segundo bisector enel segundo y cuarto cuadrante.
Para representar en dos dimensiones (sobre un papel) lasvistas principales en el sistema diédrico, se realiza unabatimiento, que consiste en girar, tumbar, o abatir un plano principal de tal manera que el Plano Horizontal (PH) sesuperponga al Plano Vertical (PV).
Representación de un punto
Un punto situado en el espacio se representa mediante sus dosproyecciones (a modo de sombras) sobre los planos principales:proyección horizontal y proyección vertical.
CotaSe denomina cota de un punto del espacio a la distancia entre él y suproyección en el plano horizontal, o lo que es lo mismo la distanciaentre la proyección vertical y la línea de Tierra (LT).
AlejamientoSe denomina alejamiento de un punto del espacio a la distancia entre ély su proyección en el plano vertical, que equivale a la distancia entre laproyección horizontal y la línea de Tierra (LT).
Determinación por coordenadasUn punto puede determinarse por coordenadas. El origen de estesistema será la intersección de los planos principales: horizontal,vertical y de perfil.
• El eje X está determinado por la recta intersección de los planoshorizontal y vertical, es decir, sobre la Línea de tierra.
• El eje Y está determinado por la recta intersección de los planos horizontal y de perfil.• El eje Z está determinado por la recta intersección de los planos vertical y de perfil.

Sistema diédrico 192
Representación de una recta
Una recta está definida cuando se conocen sus dos proyecciones,horizontal y vertical. La proyección de una recta sobre un plano es otrarecta, formada por la proyección de todos los puntos de ella.Conociendo las parejas de proyecciones de dos puntos de una recta, seobtiene la proyección uniéndolos.
Trazas de una rectaLas trazas de una recta son los puntos de intersección con los planosprincipales (PV y PH)
Representación de un plano
Un plano está definido mediante sus dos trazas: la vertical y lahorizontal. Las trazas de un plano son las rectas de intersección con losplanos principales (PV y PH).
Una recta pertenece a un plano, si la traza vertical de la recta es unpunto de la traza vertical del plano y, además, la traza horizontal de larecta es un punto de la traza horizontal del plano.
AbatimientosPara obtener, en verdadera magnitud, la representación de una figuracontenida en un plano cualquiera, se abate dicho plano sobre uno de losprincipales.
Representación de un volumen geométrico
Un cuerpo geométrico se representa mediante la proyección de susaristas, sus generatrices extremas, o su contorno (esfera). Las aristas ogeneratrices más próximas al punto de vista se representan comosegmentos de trazo continuo, y las posteriores, u ocultas, mediantesegmentos de trazo discontinuo. Las zonas seccionadas se indicanmediante trazos paralelos inclinados.
Sistema diédrico 193
Representación de una circunferencia
La proyección de una circunferencia es, generalmente, una elipse. Seráotra circunferencia semejante si está contenida en un plano paralelo auno principal. Puede ser un segmento si está de perfil respecto de unplano principal, siendo su longitud la del diámetro.
Diferentes sistemas
Según como estén reflejadas las proyecciones en el plano del dibujo,existen dos sistemas de representación:•• Sistema europeo: Las proyecciones se recogen tras el objeto. Son
vistas en el primer cuadrante.•• Sistema americano: Las proyecciones se reflejan desde el objeto.
Son vistas en el tercer cuadrante.Aunque en ambos sistemas las proyecciones (representaciones del objeto) son exactamente las mismas, sudisposición en el plano del dibujo es la inversa.
Enlaces externos• Sistema diédrico en trazoide.com [1]
• VIDEO-TUTORIAL Obtención de las Vistas de una pieza, sus Proyecciones: Planta Alzado y Perfil Izquierdo [2]
• www.sacosta.org/diedrico [3] Relación de més de 100 vídeos sobre diédrico directo. Temario de bachillerato.Material complementario para hacer los ejercicios. Ejercicios de selectividad sobre el tema resueltos en losvideos.
• Sistema diédrico en tododibujo.com [4]
• Sistema Diédrico, en isftic.mepsyd.es [5]
• Sistema diédrico en laslaminas.es [6]
• Laboratorio virtual para el estudio del Sistema Diédrico por Jose Antonio Cuadrado [7]
Referencias[1] http:/ / trazoide. com/ introduccion-3. html[2] https:/ / sites. google. com/ site/ oscarsaborido/ home/ 1o-de-la-eso/ vistas-de-una-pieza[3] http:/ / www. sacosta. org/ diedrico[4] http:/ / www. tododibujo. com/ sistemadiedrico. html[5] http:/ / www. isftic. mepsyd. es/ w3/ recursos/ bachillerato/ tecnologia/ manual/ sistema/ intro. htm[6] http:/ / www. laslaminas. es/ geometria-descriptiva/ diedrico[7] http:/ / palmera. pntic. mec. es/ ~jcuadr2/ laboratoriosd/ index. html

Elipse 194
ElipseLa elipse es una línea curva, cerrada y plana cuya definición más usual es:
La elipse es el lugar geométrico de todos los puntos de un plano, tales que la suma de las distancias a otros dos puntos fijos llamados focoses constante.
Una elipse es la curva simétrica cerrada que resulta al cortar la superficie de un cono por un plano oblicuo al eje desimetría –con ángulo mayor que el de la generatriz respecto del eje de revolución.[1] Una elipse que gira alrededor desu eje menor genera un esferoide achatado, mientras que una elipse que gira alrededor de su eje principal genera unesferoide alargado.
Historia
Forma elíptica trazada en la antigüedad sobre un muro deTebas (Egipto).
La elipse, como curva geométrica, fue estudiada porMenecmo, investigada por Euclides, y su nombre se atribuye aApolonio de Perge. El foco y la directriz de la sección cónicade una elipse fueron estudiadas por Pappus. En 1602, Keplercreía que la órbita de Marte era ovalada, aunque más tardedescubrió que se trataba de una elipse con el Sol en un foco.De hecho, Kepler introdujo la palabra «focus» y publicó sudescubrimiento en 1609. Halley, en 1705, demostró que elcometa que ahora lleva su nombre trazaba una órbita elípticaalrededor del Sol.[2]

Elipse 195
Elementos de una elipse
La elipse y algunas de sus propiedades matemáticas.
La elipse es una curva plana y cerrada,simétrica respecto a dos ejesperpendiculares entre sí:• El semieje mayor (el segmento C-a
de la figura), y• el semieje menor (el segmento C-b
de la figura).
Miden la mitad del eje mayor y menorrespectivamente.
Puntos de una elipse
Los focos de la elipse son dos puntosequidistantes del centro, F1 y F2 en eleje mayor. La suma de las distanciasdesde cualquier punto P de la elipse alos dos focos es constante, e igual a la longitud del diámetro mayor, (PF1 + PF2 = 2a).
Si F1 y F2 son dos puntos de un plano, y 2a es una constante mayor que la distancia F1F2, un punto P pertenecerá ala elipse si se cumple la relación:
donde es la medida del semieje mayor de la elipse.
Ejes de una elipseEl eje mayor 2a, es la mayor distancia entre dos puntos adversos de la elipse. El resultado constante de la suma delas distancias de cualquier punto a los focos equivale al eje mayor. El eje menor 2b, es la menor distancia entre dospuntos adversos de la elipse. Los ejes de la elipse son perpendiculares entre si.
Excentricidad de una elipseLa excentricidad ε (épsilon) de una elipse es la razón entre su semidistancia focal (segmento que va del centro de laelipse a uno de sus focos), denominada por la letra c, y su semieje mayor. Su valor se encuentra entre cero y uno.
, con
Dado que , también vale la relación:
o el sistema:
La excentricidad indica la forma de una elipse; una elipse será más redondeada cuanto más se aproxime suexcentricidad al valor cero.[3] La designación tradicional de la excentricidad es la letra griega ε llamada épsilon.(No se debe usar la letra e para designarla, porque se reserva para la base de los logaritmos naturales o neperianos.Véase: número e).
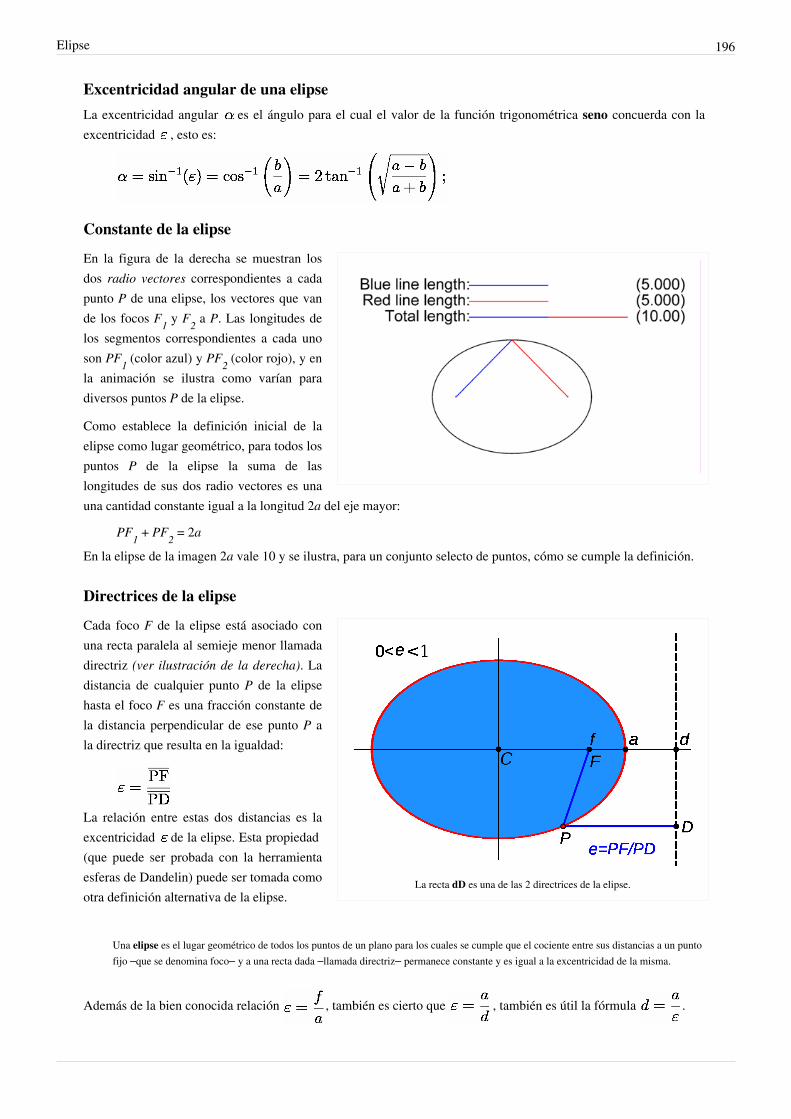
Elipse 196
Excentricidad angular de una elipseLa excentricidad angular es el ángulo para el cual el valor de la función trigonométrica seno concuerda con laexcentricidad , esto es:
Constante de la elipse
En la figura de la derecha se muestran losdos radio vectores correspondientes a cadapunto P de una elipse, los vectores que vande los focos F1 y F2 a P. Las longitudes delos segmentos correspondientes a cada unoson PF1 (color azul) y PF2 (color rojo), y enla animación se ilustra como varían paradiversos puntos P de la elipse.
Como establece la definición inicial de laelipse como lugar geométrico, para todos lospuntos P de la elipse la suma de laslongitudes de sus dos radio vectores es unauna cantidad constante igual a la longitud 2a del eje mayor:
PF1 + PF2 = 2a
En la elipse de la imagen 2a vale 10 y se ilustra, para un conjunto selecto de puntos, cómo se cumple la definición.
Directrices de la elipse
La recta dD es una de las 2 directrices de la elipse.
Cada foco F de la elipse está asociado conuna recta paralela al semieje menor llamadadirectriz (ver ilustración de la derecha). Ladistancia de cualquier punto P de la elipsehasta el foco F es una fracción constante dela distancia perpendicular de ese punto P ala directriz que resulta en la igualdad:
La relación entre estas dos distancias es laexcentricidad de la elipse. Esta propiedad(que puede ser probada con la herramientaesferas de Dandelin) puede ser tomada comootra definición alternativa de la elipse.
Una elipse es el lugar geométrico de todos los puntos de un plano para los cuales se cumple que el cociente entre sus distancias a un puntofijo –que se denomina foco– y a una recta dada –llamada directriz– permanece constante y es igual a la excentricidad de la misma.
Además de la bien conocida relación , también es cierto que , también es útil la fórmula .

Elipse 197
Aunque en la figura solo se dibujó la directriz del foco derecho, existe otra directriz para el foco izquierdo cuyadistancia del centro O es -d, la cual además es paralela a la directriz anterior.
Ecuaciones de la elipse
En coordenadas cartesianas
Forma cartesiana centrada en origen
La ecuación de una elipse en coordenadas cartesianas, con centro en el origen, es:
donde a > 0 y b > 0 son los semiejes de la elipse, donde si a corresponde al eje de las abscisas y b al eje de lasordenadas la elipse es horizontal, si es al revés, entonces es vertical. El origen O es la mitad del segmento [FF']. Ladistancia entre los focos FF' se llama distancia focal y vale 2c = 2ea, siendo e la excentricidad y a el semiejemayor.
Forma cartesiana centrada fuera del origen
Si el centro de la elipse se encuentra en el punto (h,k), la ecuación es:
En coordenadas polares
Forma polar centrada en origen
En coordenadas polares, con origen en su centro, la ecuación de la elipse es:(epc 1)
Una ecuación más elegante que la anterior (pero que obliga a pre-calcular la excentricidad ), es:
(epc 2)
Para ambas ecuaciones a es el semieje mayor, b es el semieje menor de la elipse, θ es el ángulo polar y para la (epc2) ε es la excentricidad.
Si no se quiere pre-calcular la excentricidad convendrá utilizar la ecuación (epc 1), en caso contrario
utilizar la ecuación (epc 2).

Elipse 198
Formas polares centradas en un foco
Coord. polares sobre un foco.
En coordenadas polares, con el origen en uno de susfocos, la ecuación de la elipse es:
(501)
Para el otro foco:(502)
"Semi-latus rectum" (en verde) de la elipse.
En el caso un poco más general de una elipse con unfoco en el origen y el otro foco en la coordenadaangular , la forma polar es:
(503)
El ángulo de las ecuaciones (501),(502) y (503) es lallamada anomalía verdadera del punto y el numeradorde las mismas es el llamado semi-latus
rectum de la elipse, normalmente denotado . Elsemi-latus rectum es la distancia entre un foco y lamisma elipse sobre una línea perpendicular al semieje mayor que pasa por el foco.
Formas paramétricas
La ecuación paramétrica de una elipse con centro en y siendo el semieje mayor y el menor, es:
con no es el ángulo θ del sistema de coordenadas polares con origen en el centro de la elipse,sino la anomalía excéntrica de la elipse. La relación entre y θ es
.
La ecuación paramétrica de una elipse con centro en en la que el parámetro sea concordante con el ángulopolar respecto al centro desplazado es:
con . El parámetro es el ángulo de un sistema polar cuyo origen está centrado en .

Elipse 199
Área interior de una elipseEl área de la superficie interior de una elipse es:
Siendo a y b los semiejes.[4]
Perímetro de una elipseEl cálculo del perímetro de una elipse requiere del cálculo de integrales elípticas de segunda especie.Sin embargo, el matemático Ramanujan dio una expresión sencilla que se aproxima razonablemente a la longitud dela elipse, pero en grado menor que la obtenida mediante integrales elípticas. Ramanujan, en su fórmula, utiliza el“semieje mayor” (a) y el “semieje menor” (b) de la elipse. Expresión aproximada del perímetro de una elipse:
Propiedades notablesLa elipse goza de ciertas propiedades asociadas a sus componentes, como se puede ver en Analogía de Michelson yMorley.
La elipse como cónicaLa elipse surge de la intersección de una superficie cónica con un plano, de tal manera que la inclinación del planono supere la inclinación de la recta generatriz del cono, consiguiendo así que la intersección sea una curva cerrada.En otro caso el corte podría ser una hipérbola o una parábola. Es por ello que a todas estas figuras bidimensionales selas llama secciones cónicas o simplemente cónicas.
la elipse como cónica.

Elipse 200
La elipse como hipotrocoideLa elipse es un caso particular de hipotrocoide, donde R = 2r, siendo R el radio de la circunferencia directriz, y r elradio de la circunferencia generatriz.En una curva hipotrocoide, la circunferencia que contiene al punto generatriz, gira tangencialmente por el interior dela circunferencia directriz.
La elipse como caso particular de hipotrocoide.Datos: R = 10, r = 5, d = 1.
Construcción paramétrica de una elipseSe dibujan dos circunferencias concéntricas cuyos diámetros equivalen a la medida de los ejes ortogonales de lafutura elipse. Si trazamos segmentos palalelos a los ejes principales X e Y, partiendo del extremo de los radiosalineados, la intersección de dichos segmentos son puntos de la elipse.

Elipse 201
Anamorfosis de una circunferencia en una elipseDeterminada trasformación de la circunferencia (al deformar ortogonalmente el plano cartesiano asociado a ella), sedenomina anamorfosis. Se corresponde con una perspectiva especial. El término anamorfosis proviene del idiomagriego y significa trasformar.
Una circunferencia en un plano cartesiano no deformado.
Esta circunferencia se transforma en una elipse mediante unaanamorfosis, donde el eje Y se ha contraído y/o el X se ha
dilatado.
En el caso de la circunferencia, si el plano cartesiano se divide en cuadrados, cuando dicho plano se «deforma» ensentido del eje X, el Y, o ambos, la circunferencia se transforma en una elipse y los cuadrados en rectángulos.
Elipses semejantesSe dice que dos figuras son semejantes cuando se diferencian sólo en el tamaño (pero no en la forma), de tal maneraque multiplicando todas las longitudes por un factor dado, se pasa de una figura a la otra. Hay un teorema de utilidaden Física[5] acerca de la intersección de una recta con dos elipses semejantes y concéntricas.
Teorema: Si la intersección de una recta con la corona comprendida entre dos elipses semejantes con el mismo centro y ejescorrespondientes colineales consta de dos segmentos, entonces éstos tienen igual longitud.
Explicación: El teorema es cierto, por simetría, en el caso particular en que las elipses dadas sean dos circunferenciasconcéntricas. Contrayendo o dilatando uniformemente una de las direcciones coordenadas, mediante anamorfosis,podemos transformar cualquier caso en este caso particular, pues todos los segmentos con la misma pendientecambian su longitud en la misma proporción. Por tanto, puesto que al final del proceso los dos segmentos de la rectatienen la misma longitud, la tenían ya al principio.No deben confundirse las elipses semejantes con las elipses cofocales.

Elipse 202
La elipse en mecánica celeste
Diagrama ilustrando la segunda ley de Kepler, "en tiempos iguales unamasa en órbita barre con su radio vector áreas iguales".
En mecánica celeste clásica, dos masas puntualessometidas exclusivamente a interacción gravitatoriadescriben una órbita elíptica (o circular [6]) la una entorno a la otra cuando la órbita es cerrada. Unobservador situado en cualquiera de las masas veráque la otra describe una elipse uno de cuyos focos (ocentro) está ocupado por el propio observador. Laexcentricidad y otros parámetros de la trayectoriadependen, para dos masas dadas, de las posiciones yvelocidades relativas. Los planetas y el Sol satisfacenla condición de masas puntuales con gran precisiónporque sus dimensiones son mucho más pequeñasque las distancias entre ellos. La cinemática de laórbita se rige por las leyes de Kepler.
En la figura pueden verse dos intervalos de tiempodistintos de una órbita elíptica que cumplen la segunda ley de Kepler: "en tiempos iguales una masa en órbita barrecon su radio vector áreas iguales". Cuando el "planeta" está más cerca de la "estrella" va más rápido y cuando estálejos va más despacio, pero de tal manera que su velocidad areolar es la misma en ambos casos. Esto significa quelas áreas de los sectores elípticos amarillos son iguales y sus arcos t0 t1 se han recorrido en intervalos de tiempoiguales, Δt = t1 - t0. La "estrella" está situada en P, uno de los focos de la elipse.
Referencias[1] Si el ángulo de plano intersección, respecto del eje de revolución, es menor que el comprendido entre la generatriz y el eje de revolución, la
intersección será una hipérbola. Será una parábola si es paralelo al citado eje, y una circunferencia si es perpendicular dicho eje.[2] Weisstein, Eric W. « Elipse (http:/ / mathworld. wolfram. com/ Ellipse. html)» (en inglés). MathWorld. Wolfram Research.[3] Ejemplos de excentricidad de una elipse, en geometriadinamica (http:/ / geometriadinamica. es/ Geometria/ Conicas-y-otras-curvas/
Elipse-Excentricidad. html)[4] Ejemplo en educaplus (http:/ / www. educaplus. org/ play-22-Ãrea-de-la-elipse. html)[5] Ellipsoidal Figures of Equilibrium de S. Chandrasekhar, 1969, Yale University.[6] Según Platón y Aristóteles las órbitas de los planetas eran circulares. Claudio Ptolomeo en su Teoría geocéntrica observó los epiciclos y
Kepler vio que los planetas describían elipses en torno al Sol.
Enlaces externos• Wikimedia Commons alberga contenido multimedia sobre Elipse. Commons• Weisstein, Eric W. « Elipse (http:/ / mathworld. wolfram. com/ Ellipse. html)» (en inglés). MathWorld. Wolfram
Research.• Actividad escolar para estudiar la elipse. (http:/ / www. educaplus. org/ play-181. html)• Cálculo del perímetro de una elipse (http:/ / www. disfrutalasmatematicas. com/ geometria/ elipse-perimetro.
html)• Animación de un plano seccionando un cono y determinando la curva cónica elipse. (http:/ / www. stefanelli. eng.
br/ webpage/ es_elipse. html)• Cómo trazar una elipse de dimensiones prefijadas (http:/ / cyt-ar. com. ar/ cyt-ar/ index. php/
Cómo_trazar_una_elipse).

Cono (geometría) 203
Cono (geometría)En geometría, un cono recto es un sólido de revolución generado por elgiro de un triángulo rectángulo alrededor de uno de sus catetos. Alcírculo conformado por el otro cateto se denomina base y al puntodonde confluyen las generatrices se llama vértice.
Superficie cónica se denomina a toda superficie reglada conformadapor el conjunto de rectas que teniendo un punto común (el vértice),intersecan a una circunferencia no coplanaria.
Clasificación
Cono recto y cono oblicuo.
Se denominan:• Cono recto, si el vértice equidista de la base circular• Cono oblicuo, si el vértice no equidista de su base
circular• Cono elíptico, si la base es una elipse. Pueden ser
rectos u oblicuos.
La generatriz de un cono es cada uno de los segmentoscuyos extremos son el vértice y un punto de lacircunferencia de la base.
La altura de un cono es la distancia del vértice al planode la base. En los conos rectos será la distancia delvértice al centro de la circunferencia de la base.
Área de la superficie cónicaEl área de la superficie del cono recto es:
donde r es el radio de la base y g la longitud de la generatriz del cono recto.La generatriz de un cono recto equivale a la hipotenusa del triángulo rectángulo que conforma con la altura del conoy el radio de la base;
su longitud es: .
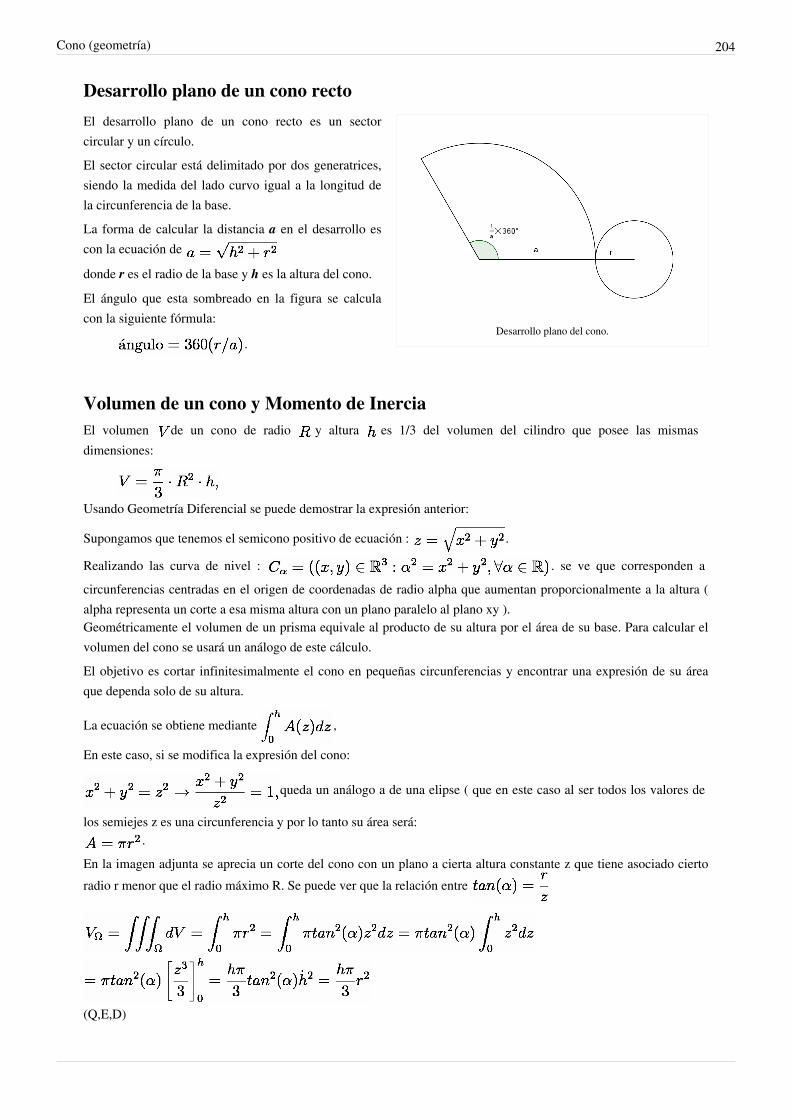
Cono (geometría) 204
Desarrollo plano de un cono recto
Desarrollo plano del cono.
El desarrollo plano de un cono recto es un sectorcircular y un círculo.El sector circular está delimitado por dos generatrices,siendo la medida del lado curvo igual a la longitud dela circunferencia de la base.La forma de calcular la distancia a en el desarrollo escon la ecuación de
donde r es el radio de la base y h es la altura del cono.El ángulo que esta sombreado en la figura se calculacon la siguiente fórmula:
.
Volumen de un cono y Momento de InerciaEl volumen de un cono de radio y altura es 1/3 del volumen del cilindro que posee las mismasdimensiones:
Usando Geometría Diferencial se puede demostrar la expresión anterior:
Supongamos que tenemos el semicono positivo de ecuación : .
Realizando las curva de nivel : . se ve que corresponden acircunferencias centradas en el origen de coordenadas de radio alpha que aumentan proporcionalmente a la altura (alpha representa un corte a esa misma altura con un plano paralelo al plano xy ).Geométricamente el volumen de un prisma equivale al producto de su altura por el área de su base. Para calcular elvolumen del cono se usará un análogo de este cálculo.El objetivo es cortar infinitesimalmente el cono en pequeñas circunferencias y encontrar una expresión de su áreaque dependa solo de su altura.
La ecuación se obtiene mediante ,
En este caso, si se modifica la expresión del cono:
queda un análogo a de una elipse ( que en este caso al ser todos los valores de
los semiejes z es una circunferencia y por lo tanto su área será:.
En la imagen adjunta se aprecia un corte del cono con un plano a cierta altura constante z que tiene asociado ciertoradio r menor que el radio máximo R. Se puede ver que la relación entre
(Q,E,D)

Cono (geometría) 205
Usando el resultado anterior se puede calcular el moneto de Inercia de un Cono, por ejemplo respecto del eje Z.
donde rho representa la funcion de la densidad de masa del sólido ( en este
caso se considerará una densidad constante y un sólido homogéneo).
Secciones cónicas
Distintas secciones cónicas.
Al cortar con un plano a una superficie cónica, se obtiene distintasfiguras geométricas: las secciones cónicas. Dependiendo del ángulo deinclinación y la posición relativa, pueden ser: circunferencias, elipses,parábolas e hipérbolas.
Si el plano pasa por el vértice la intersección podrá ser: una recta, unpar de rectas cruzadas o un punto (el vértice).Las curvas cónicas son importantes en astronomía: dos cuerposmasivos que interactúan según la ley universal de la gravitación,describen órbitas similares a secciones cónicas: elipses, hipérbolas oparábolas en función de sus distancias, velocidades y masas.También son muy útiles en aerodinámica y otras aplicacionesindustriales, ya que permiten ser reproducidas por medios simples con gran exactitud, logrando volúmenes,superficies y curvas de gran precisión.
Ecuación en coordenadas cartesianas
Superficie cónica.
En Geometría analítica y Geometría diferencial, el cono es el conjuntode puntos del espacio que verifican, respecto un sistema decoordenadas cartesianas, una ecuación del tipo:
Este conjunto también coincide con la imagen de la función:
que es llamada parametrización del cono.Por ejemplo, en el caso que a = b (no nulos), éste conjunto es obtenidoa partir de rotar la recta respecto al eje z, y por eso es
llamada parametrización de revolución.
El cono no es una superficie regular, pues posee una singularidad: su vértice; quitándolo se convierte en unasuperficie regular disconexa y abierta. Entre sus características, podemos destacar que es una superficie reglada (esdecir que se puede generar por el movimiento de una recta), y es desarrollable, es decir, que se puede desplegarsobre un plano; técnicamente esto se expresa diciendo que su curvatura gaussiana es nula (como en el plano o elcilindro)

Cono (geometría) 206
Enlaces externos• Wikimedia Commons alberga contenido multimedia sobre conos. Commons• Weisstein, Eric W. «Cono [1]» (en inglés). MathWorld. Wolfram Research.• Weisstein, Eric W. «Generalized Cone [2]» (en inglés). MathWorld. Wolfram Research.• http:/ / math2. org/ math/ algebra/ es-conics. htm
Referencias[1] http:/ / mathworld. wolfram. com/ Cone. html[2] http:/ / mathworld. wolfram. com/ GeneralizedCone. html
Fuentes y contribuyentes del artículo 207
Fuentes y contribuyentes del artículoParábola (matemática) Fuente: http://es.wikipedia.org/w/index.php?oldid=57585788 Contribuyentes: -Erick-, .Sergio, 333, 3coma14, Airunp, Andre Engels, Angel.F, Antón Francho, B1mbo,Baiji, Banfield, Barmes, Barteik, BlackBeast, Bolt58, Camilo, Cansado, Carlos Alberto Carcagno, Carlos Molina Fisico, Cdlfd, Charly genio, Chuffo, Cobalttempest, Ctrl Z, Dangelin5,David0811, Dianai, Diegusjaimes, DrCapi, Draxtreme, Ecemaml, Elabra sanchez, Emiduronte, Fibonacci, Fsd141, Gafotas, GermanX, Gusbelluwiki, Gusgus, Gustronico, Götz, Helmy oved,HiTe, Hosg, Hprmedina, Humberto, INYCA, Idealis, Isb1009, Isha, Ivanpares, JAGT, JMCC1, Jag2k4, Jcuadra2, Jkbw, Johns, Kadellar, Kordas, Kved, Leonpolanco, Lucien leGrey, MagisterMathematicae, Makete, Maldoror, Matdrodes, Mercenario97, Miss Manzana, Moriel, Mortadelo2005, Nicop, No sé qué nick poner, Oblongo, Paz.ar, Pedro abraham ramirez, Platonides, Porao,Proferichardperez, Prometheus, Pólux, Racso, Raulshc, Ricard Delgado Gonzalo, Ricardogpn, RubiksMaster110, Sebrev, SuperBraulio13, Superzerocool, Tano4595, Technopat, Tirithel, VicFede, Vivero, Wilfredor, Xexito, Youssefsan, Yrithinnd, 313 ediciones anónimas
Sección cónica Fuente: http://es.wikipedia.org/w/index.php?oldid=57699005 Contribuyentes: Addicted04, Alhen, Beralmar, Carteaux, Claudio Elias, Corchero83, Diegusjaimes, EL Willy,Ecemaml, Especiales, Gaius iulius caesar, GermanX, Gusbelluwiki, Götz, HUB, Hosg, IgnominiouZ, Isha, JMCC1, Jcuadra2, Jerowiki, Jkbw, Jtico, Kraton, Leandroidecba, Locutus Borg,Loslerd, Luisgdelarosa, Magister Mathematicae, Maleiva, Matdrodes, Mitrush, Mnemotecnia, Moriel, Mr.Ajedrez, Pececito, Pólux, Richard41799, Rrmsjp, Sabbut, Sergio Andres Segovia,Snakeyes, TE AMO PIOJO, Tano4595, Tomatejc, Txuspe, Xabier, Yrithinnd, 106 ediciones anónimas
Generatriz Fuente: http://es.wikipedia.org/w/index.php?oldid=56798082 Contribuyentes: -seb-, Davius, Gusgus, JMCC1, Jkbw, Juan Mayordomo, Karpoke, Savh, THINK TANK, Taichi, 21ediciones anónimas
Cicloide Fuente: http://es.wikipedia.org/w/index.php?oldid=56252534 Contribuyentes: Allforrous, Bernardo Bolaños, Eamezaga, Ecemaml, El paseista, Emiduronte, FAR, Fsd141, Goofulus,Götz, Ingenioso Hidalgo, JMCC1, Jcuadra2, Jkbw, Jorge 2701, Juan Mayordomo, Klystrode, Pacomeflo, PenumbraDigital, Por la verdad, Tamorlan, Tano4595, Waka Waka, 42 edicionesanónimas
Cálculo de variaciones Fuente: http://es.wikipedia.org/w/index.php?oldid=54063026 Contribuyentes: Bachi 2805, Daniel De Leon Martinez, Davius, Farisori, GermanX, Hflores, Jkbw, JuanMarquez, Juan Mayordomo, L'irie, Mister, Perensejo, Rsg, Sargentgarcia89, Technopat, 25 ediciones anónimas
Isoperimetría Fuente: http://es.wikipedia.org/w/index.php?oldid=55624034 Contribuyentes: GermanX, Gusbelluwiki, Heimy, Jerowiki, Jorge c2010, Juan Marquez, Juan Mayordomo
Teorema de Green Fuente: http://es.wikipedia.org/w/index.php?oldid=55924326 Contribuyentes: Alfredobi, Belgrano, Chrisortega 88, Cookie, Davius, DefLog, Elwikipedista, Farisori, Jag2k4,Kved, LordRoy, Wricardoh, 30 ediciones anónimas
Teorema de Stokes Fuente: http://es.wikipedia.org/w/index.php?oldid=54264184 Contribuyentes: Andrezitofer, Aqui c, Davius, DefLog, Farisori, Fbarrientos, Gato ocioso, GermanX, Jkbw,Juan Mayordomo, Kenrych, Kved, Laurentius IT, Parodrilo, Pino, RGLago, XalD, 17 ediciones anónimas
Teorema de la divergencia Fuente: http://es.wikipedia.org/w/index.php?oldid=57370060 Contribuyentes: 19jp87, Abuelodelanada, Alfredobi, Algarabia, Belgrano, Charlitos, Cristinauem,Davius, Diegotorquemada, Dossier2, Farisori, Jamrb, Javiermarinros, Jtico, Linkedark, Manwë, Matdrodes, Pablolap, Petronas, Raulshc, Tano4595, Technopat, 59 ediciones anónimas
Divergencia (matemática) Fuente: http://es.wikipedia.org/w/index.php?oldid=56214014 Contribuyentes: Aeveraal, Danielmh28, Davius, Diegusjaimes, Dusan, Fibonacci, Gafotas, Ggenellina,IvanStepaniuk, Jamrb, Jtico, Levuj, Linkedark, Matdrodes, Redbridge, Tano4595, 23 ediciones anónimas
Gradiente Fuente: http://es.wikipedia.org/w/index.php?oldid=56033504 Contribuyentes: Abrahaman, Acratta, Af3, Alpha Floor, Antionio, Baytazz, Camima, Daniel De Leon Martinez, Davius,Diegusjaimes, Dodo, Eseotres, Fseoane, Gonfer, Gusbelluwiki, Götz, HUB, Harley orjuela, Hprmedina, Humbefa, J.R.Menzinger, Jekter, Lauranrg, Maldoror, Mdiagom, Netito777, Pati, Pino,Pólux, Rdaneel, Signifer, SpeedyGonzalez, Superzerocool, Tano4595, Tirithel, Torbellino, 90 ediciones anónimas
Jacobiano Fuente: http://es.wikipedia.org/w/index.php?oldid=56933729 Contribuyentes: Alebergen, Charlitos, Dangelin5, Davius, Diego Aranda, Futbolero, Gato ocioso, GermanX,Gusbelluwiki, Gusgus, IntruDDer, Isha, Jkbw, JoseA, Juan Marquez, Kved, Lagranggio, Leonpolanco, Maesendmi, Matdrodes, NeoRichard, Paintman, Porao, Rdaneel, Ricardogpn, SaeedVilla,50 ediciones anónimas
Derivada parcial Fuente: http://es.wikipedia.org/w/index.php?oldid=56117852 Contribuyentes: 2piruben, Açipni-Lovrij, Belgrano, Charlitos, Cjvs2, Davius, Diegusjaimes, Dnu72, Farisori,GermanX, Ggenellina, HellMind, Hispa, In Extrema Res, Ingenioso Hidalgo, J.R.Menzinger, Javiermarinros, Juan Marquez, Juan Mayordomo, Kojie, Lobishomen, Mcapdevila, Mpeinadopa,Paintman, Pino, Rdaneel, Rsg, SpeedyGonzalez, Usuwiki, 71 ediciones anónimas
Geometría diferencial Fuente: http://es.wikipedia.org/w/index.php?oldid=55768753 Contribuyentes: Cinabrium, Davius, Digigalos, F.A.A, Gato ocioso, Josell2, Juan Marquez, Mandramas,Maveric149, Moriel, Pasajero, conversion script, sam.mat.uab.es, 11 ediciones anónimas
Fibrado Fuente: http://es.wikipedia.org/w/index.php?oldid=54804427 Contribuyentes: Akhram, Daniloquispe, DefLog, Drake 81, JMCC1, Jarisleif, Jerowiki, Jtico, Juan Marquez, LeCire,Mcapdevila, Pólux, RuHouse'ls, Tano4595, Wewe, 12 ediciones anónimas
Fibrado de Seifert Fuente: http://es.wikipedia.org/w/index.php?oldid=45244133 Contribuyentes: Alexav8, GermanX, Juan Marquez, Tano4595, 1 ediciones anónimas
Teoría de campo de gauge Fuente: http://es.wikipedia.org/w/index.php?oldid=54727614 Contribuyentes: 3coma14, Brigan, Cdani, Davius, Ejmeza, GermanX, Joseaperez, Maldoror,Nanovapor9, Slave4u, Unificacion, 7 ediciones anónimas
Grupo de Lie Fuente: http://es.wikipedia.org/w/index.php?oldid=57631670 Contribuyentes: .José, Alefisico, Alpha carinae, Artra, Bibliofilotranstornado, Daniel De Leon Martinez, Davius,DefLog, Er Komandante, Gato ocioso, GermanX, Ingenioso Hidalgo, Joseaperez, Juan Marquez, Juan Mayordomo, Leonpolanco, Nanovapor9, RuHouse'ls, Tirabo, Txebixev, Xtquique, 8ediciones anónimas
Teoría de categorías Fuente: http://es.wikipedia.org/w/index.php?oldid=56080867 Contribuyentes: Akhram, Balrog-kun, Bernardo Bolaños, CaStarCo, Carmin, DefLog, Dodo, Elwikipedista,Gusgus, Gustronico, Humbefa, Ivandm, Ivn, JorgeGG, Joseaperez, Jsanchezes, Juan Marquez, Julian Mendez, Magister Mathematicae, Manuelt15, Marianov, Marsa, Penarc, Raulshc, Rondador,Yoguiberto, 67 ediciones anónimas
Análisis complejo Fuente: http://es.wikipedia.org/w/index.php?oldid=54454725 Contribuyentes: Alefisico, Dark, Davidsevilla, Davius, Emijrp, Eyrryds, Felipe Cruz G., Jsanchezes, Jtico, JuanMayordomo, Matdrodes, Raulshc, Rodriguillo, Sanbec, Tano4595, 22 ediciones anónimas
Clase característica Fuente: http://es.wikipedia.org/w/index.php?oldid=49167094 Contribuyentes: Akhram, DefLog, Jerowiki, Juan Marquez, Segedano, 6 ediciones anónimas
Derivada covariante Fuente: http://es.wikipedia.org/w/index.php?oldid=56491727 Contribuyentes: Davius, Juan Marquez, Tomatejc, 4 ediciones anónimas
Tensor de curvatura Fuente: http://es.wikipedia.org/w/index.php?oldid=56308675 Contribuyentes: Davius, DefLog, Emc2fred83, Gato ocioso, Hippokrateszholdacskai, Ingenioso Hidalgo,Juan Marquez, Lourdes Cardenal, Porao, Ronaldo16, Tano4595, 30 ediciones anónimas
Teoría de la relatividad Fuente: http://es.wikipedia.org/w/index.php?oldid=57677778 Contribuyentes: .José, Acratta, Alberto Salguero, AldanaN, Alefisico, Andreasmperu, Angel GN, Angus,Ansalto, Antoni Bosch editor, Antón Francho, Ascánder, AstroNomo, Açipni-Lovrij, BF14, Baiji, Banck, Banfield, Benjaminrg, BetelMayet, Biasoli, Bonnot, Bruno Tonello, BuenaGente,CLAMP96, Cheveri, Christopher Simpson, Cidel, Cinabrium, Cipión, Cmkb, Cobalttempest, CommonsDelinker, Ctrl Z, DVdm, Dalton2, David0811, Davidmartindel, Davius, Diegusjaimes,Dimenson, Dodo, Drake 81, Dreitmen, Eamezaga, Eduardosalg, Ehurtado, Elvire, Emiduronte, Emijrp, Equi, Er Chupakabra, Fhaidel, Fmercury1980, Foundling, Fsd141, Gabriel Vidal Álvarez,Ganzua919, Gorospe, HUB, Halfdrag, Hawking, Humbefa, Humberto, Hurtaksk, Ialad, Isha, Ishu 2, Ivan.gz, JMCC1, Jarisleif, Jcaraballo, Jkbw, Jmlarraz, JohnRodriguez577, Jorge c2010,Jorghex, Ketamino, Kismalac, KnightRider, Kordas, Laura Fiorucci, LeCire, Leotronx, Lourdes Cardenal, Luis Cortés Barbado, Luisminho 76, Maldoror, Manuel Trujillo Berges, Manwë,MarcoAurelio, Marsal20, Matdrodes, Maveric149, Mel 23, Mfropelato, Miguel303xm, Moraleh, Moriel, Mutari, Naeyol negast, Netito777, Niko Ruaimi, Ninovolador, Numbo3, Oblongo, Oscar., Palissy, Paradise2, Paul 14, PedroMCh, PeiT, Petronas, Petruss, Phirosiberia, Pleira, Poco a poco, Psychophanta, Pólux, Queninosta, QuiRóH, Rafaelg64, Ravave, Rbo159, Relleu, Richy,Rigenea, Roche, Romero Schmidtke, S3o33be3l, Savh, Schekinov Alexey Victorovich, Sebasgs, Sebrev, Skider, Srbanana, SuperBraulio13, Tano4595, Technopat, Telifon, Template namespaceinitialisation script, Tirithel, Titoxd, Tutuluz, Unknown, Varano, Vic Fede, Virgi, Vitamine, Wricardoh, Xhaju, Zevlag, Zuirdj, 477 ediciones anónimas
Álgebra multilineal Fuente: http://es.wikipedia.org/w/index.php?oldid=57465338 Contribuyentes: Davius, Juan Marquez, Nanovapor9, Oblongo, Xosema, Ybbob, ZrzlKing, 16 edicionesanónimas

Fuentes y contribuyentes del artículo 208
Análisis funcional Fuente: http://es.wikipedia.org/w/index.php?oldid=54261762 Contribuyentes: CayoMarcio, DefLog, Dodo, Ejmeza, Elwikipedista, Fsd141, Juan Marquez, Juan Mayordomo,Marianov, Rapel, Ricardos, Tano4595, Wewe, 11 ediciones anónimas
Sistema formal Fuente: http://es.wikipedia.org/w/index.php?oldid=56980154 Contribuyentes: Aljullu, Atila rey, Comae, Dibujon, Diegusjaimes, Dreitmen, Dumydam, Fer31416, Isha,J.R.Menzinger, JMCC1, Jerowiki, Judas Ali-Qu, JulianMendez, Luis Felipe Schenone, MONIMINO 1, Maltusnet, Melocoton, P.o.l.o., Pilaf, Raystorm, Saloca, Sanbec, Szvest, Taichi, Troodon,Vic Fede, 36 ediciones anónimas
Geometría euclídea Fuente: http://es.wikipedia.org/w/index.php?oldid=57658238 Contribuyentes: Acratta, Alejandromenna, Alexan, Alhen, Allforrous, Anaco2000, Arlekean, Arrt-932,Cesarabad, Chewie, Cinabrium, Cookie, Danielba894, Daniyyel, Dat, Davidmh, Davidsevilla, Davius, Desde el planeta de los simios, Dianai, Diegusjaimes, Ecemaml, Echani, Eduardosalg, ElHoy, El loko, Especiales, Euclides, Euler, Ezarate, Farisori, Felipe Canales, Fibonacci, Fixertool, Foundling, Fsd141, Gcatalan, Gerkijel, GermanX, Ginés90, Gonzalez.K, Guirrohl, Gusbelluwiki,Gustronico, Góngora, Isha, JMCC1, JaviMad, Jcuadra2, Jerowiki, Jkbw, JorgeGG, JoulSauron, Jsanchezes, Juan Marquez, Juan Mayordomo, Kiut, Krusher, Larocka, Leonpolanco, Llull, LourdesCardenal, Mahadeva, Manuelt15, MarianoOsso, Matdrodes, Mel 23, Paintman, Pan con queso, Paulienator, Pececito, Platonides, Pólux, Queninosta, Rastrojo, Rosarino, SITOMON, Savh,Shalbat, SuperBraulio13, Takashi kurita, Tano4595, Technopat, Tirithel, Tituslenin, Tortillovsky, Vivero, Warrior 1955, Wewe, Yrithinnd, 176 ediciones anónimas
Geometría elíptica Fuente: http://es.wikipedia.org/w/index.php?oldid=52125422 Contribuyentes: Davius, Diegusjaimes, GermanX, Ggenellina, JMCC1, Nanovapor9, SaeedVilla, 8 edicionesanónimas
Ecuación de segundo grado Fuente: http://es.wikipedia.org/w/index.php?oldid=57581740 Contribuyentes: Abece, Airunp, Aleposta, Alhen, Alucard De León, Alvaro qc, Amadís,Andreasmperu, Angel GN, Angel verde, Antonorsi, Antur, Armando-Martin, Armonizador, Atibays, Açipni-Lovrij, Baiji, Banfield, BlackBeast, Boanerges1001, BuenaGente, Charly genio,Cobalttempest, Danielba894, Dark, Davius, Der Kreole, Diegusjaimes, Dodo, Dreitmen, EAD39Laura, Edslov, Faustino xyz, Ferbr1, Fernando H, Fran89, Francisco Valdez Mendoza, GNM,Gaddy, GermanX, Ggenellina, Gsrdzl, Guilleralpoder, HUB, Heylan, HiTe, Hichokei, Hosg, Hprmedina, Humberto, Ialad, Interwiki, JMCC1, Javierito92, Jecanre, Jerowiki, Jesús GonzálezÁlvaro, Jkbw, JoseA, Juan Mayordomo, Jurgens, Jynus, Kismalac, Kved, L30nc1t0, Leibniz Newton, Leonpolanco, Lffallas, Lourdes Cardenal, Lucien leGrey, Magister Mathematicae, ManuelTrujillo Berges, Manuelt15, Manwë, Marianov, Matdrodes, Mcetina, Morgul, Moriel, Mpinomej, Navarroaxel, Netito777, Nixón, ObscurO, Pan con queso, Pedro Nonualco, Raulshc, Rcamacho,Rockr24, Romero Schmidtke, Rosarino, Rovnet, Rubpe19, Rαge, Sabbut, Saladinmad, Santiperez, Savh, Sebrev, Sergio Andres Segovia, Shark DJ, Tano4595, Taty2007, Technopat, Thormaster,Tirithel, Trousy, UA31, Vitamine, Xenoforme, Xobra, Xosema, Youssefsan, 436 ediciones anónimas
Mediatriz Fuente: http://es.wikipedia.org/w/index.php?oldid=57612871 Contribuyentes: Aalvarez12, AlexFBP, Atardecere, Açipni-Lovrij, Banfield, Bcartolo, Chico512, Cookie, Diegusjaimes,Dodo, Edmenb, Ejmeza, El Moska, Emijrp, Erfil, Esteban Góez, Execoot, Fran89, Ginés90, Gons, Götz, HUB, Halfdrag, Hprmedina, Isha, JMCC1, Jarisleif, JavierH2SO4, Javierito92, Jkbw,Jorge 2701, Jtico, Juan Mayordomo, Julie, Klosh, Larocka, Laura Fiorucci, Leonpolanco, Matdrodes, Mathonius, Mel 23, Meldor, Moriel, Ortisa, PetrohsW, Poco a poco, Polyto, Pólux, Quatus,Raulshc, Resped, Richy, Romero Schmidtke, Rosarino, Sabbut, Sangieelizabeth, Sapey, Savh, Sebrev, Sigmanexus6, SuperBraulio13, Tatvs, Tbhotch, Technopat, Tirithel, Tsakaji, Vitamine,Vividor85, WIJU, Wikielwikingo, Wikisilki, Wilfredor, ZrzlKing, 389 ediciones anónimas
Simetría axial Fuente: http://es.wikipedia.org/w/index.php?oldid=56813790 Contribuyentes: Agualin, Airunp, Alhen, Andresmatemontes, Angel GN, BF14, Banfield, BuenaGente, CASF,Cinabrium, Cobalttempest, Dangelin5, Davius, Diegusjaimes, Digigalos, Dorieo, Eduardosalg, Emiduronte, Gergo, Gizmo II, Gustronico, Helmy oved, Hprmedina, Isha, Javierito92, Jkbw, JuanMayordomo, Leonpolanco, Manuelt15, Manwë, Mariano mario06, Matdrodes, Max tenison, Omega, Pan con queso, Poco a poco, Roberpl, Rubpe19, Rαge, Sasquatch21, Sergio Andres Segovia,Snakeyes, Taichi, Tomatejc, UA31, Y0opiZz, 117 ediciones anónimas
Simetría radial (biología) Fuente: http://es.wikipedia.org/w/index.php?oldid=57338469 Contribuyentes: Allforrous, Davius, Diegusjaimes, Foundling, GermanX, Ginés90, Gustronico,Harpagornis, IrwinSantos, JorgeGG, Jyon, LP, Lauranrg, Mcapdevila, Netkk, Pablo12345678901234567890, Quesada, Vitamine, Xvazquez, 25 ediciones anónimas
Distancia focal Fuente: http://es.wikipedia.org/w/index.php?oldid=57580112 Contribuyentes: Antonorsi, Ascánder, Avsurrutia, C4rlitoz, Caravena, Dangelin5, Dodo, Ecemaml, ErKomandante, FAL56, GermanX, Jerowiki, Jotafoto, Niqueco, Nixón, Pabloshi, Pati, Resped, Ruiz.bianca, Stardust, Wricardoh, Xgarciaf, Zaqarbal, 20 ediciones anónimas
Distancia hiperfocal Fuente: http://es.wikipedia.org/w/index.php?oldid=56120953 Contribuyentes: FAL56, GermanX, Jotafoto, LeoWins, Nioger, Poco a poco, 5 ediciones anónimas
Lugar geométrico Fuente: http://es.wikipedia.org/w/index.php?oldid=55873592 Contribuyentes: Diegusjaimes, Eduardosalg, Feministo, GermanX, Ggenellina, Ginés90, Humberto, IngeniosoHidalgo, Isgaru, JMCC1, Jerowiki, Jkbw, Joseaperez, Jtico, Macarrones, Magister Mathematicae, Manwë, Matdrodes, Netito777, Pececito, Pino, Ricard Delgado Gonzalo, Soulreaper, Tacirupecazula, Verdegaban, Vubo, Wewe, 57 ediciones anónimas
Paralelismo (matemática) Fuente: http://es.wikipedia.org/w/index.php?oldid=57367421 Contribuyentes: 4lex, BlackBeast, Cheveri, Dark Bane, Diegusjaimes, Dodo, Er Komandante, Euclides,Fefriixxss, Fibonacci, Gafotas, GermanX, Guanxito, Guimis, JMCC1, Jarisleif, Jerowiki, Jesebi, Jkbw, Jsanchezes, Jtico, Jugones55, Kaka.schuman, Larocka, Leonpolanco, Lionni, Mac m 13,Maldoror, Manuelt15, Manwë, Matdrodes, Merrick, Netito777, Nicop, Pan con queso, Periku, Pirulle, Ppja, Pólux, QuidEstVeritas?, Sawi, SuperBraulio13, Superzerocool, Tacirupeca zula,Tano4595, Tirabo, Tostadora, Wilfredor, 114 ediciones anónimas
Geometría afín Fuente: http://es.wikipedia.org/w/index.php?oldid=54503750 Contribuyentes: CayoMarcio, Eseotres, Hiperfelix, Juan Mayordomo, Raulshc, 2 ediciones anónimas
Espacio afín Fuente: http://es.wikipedia.org/w/index.php?oldid=57198696 Contribuyentes: Adelpine, Algarabia, Allforrous, Davius, GermanX, Gusbelluwiki, Ingenioso Hidalgo, Johnbojaen,ManuelMore, Marianov, Vivero, Wewe, 18 ediciones anónimas
Distancia Fuente: http://es.wikipedia.org/w/index.php?oldid=57506271 Contribuyentes: 3coma14, Airunp, Alex15090, AlfonsoERomero, Alhen, Banfield, Belascoaran mx, Belb, Bryant1410,Cal Jac02, Camilo, Davius, Dianai, Diegusjaimes, Dnu72, Dreitmen, Eduardosalg, Ef sacco, Elcimo, Eli22, Erasmuspool, FAL56, Foundling, GermanX, Gonis, Greek, Guille, Gusbelluwiki,Götz, Hosg, House, Hprmedina, ILVI, Ignacio Icke, Imaxx, JMCC1, Jarisleif, Jkbw, Jmvgpartner, Jorge c2010, JorgeGG, Jovalcis, Juan Mayordomo, Julie, Karenjara, Le K-li, Leonpolanco,Lizec, Mafores, Magister Mathematicae, ManuelGR, Mariapaula9494, Matdrodes, Maveric149, Melocoton, Moonkey, Moriel, Morza, Nepenthes, Oscar A García E, Pilaf, Pino, Pólux, Racso,Raulshc, Ricard Delgado Gonzalo, Rsg, Siquisai, Starwolf, Tano4595, Technopat, Veon, Vitamine, Walter closser, Wewe, conversion script, 158 ediciones anónimas
Perpendicularidad Fuente: http://es.wikipedia.org/w/index.php?oldid=56675623 Contribuyentes: Ale flashero, AngelCaído, Balderai, Corek, David0811, Davius, Diegusjaimes, Dorieo,Elisardojm, Ferrer.jorge, Gusgus, HUB, Humberto, JMCC1, Javierito92, Jerowiki, Jkbw, Jorge c2010, Josemi.r.l.95, Juan Mayordomo, Larocka, Luisgdelarosa, Maldoror, MarcoAurelio, MartinEmmanuel, Martinus10, Matdrodes, Mel 23, Nethac DIU, Netito777, Nicop, Porao, Pólux, Retama, Rosarino, Sigmanexus6, Snakeyes, Technopat, VanKleinen, Vic Fede, Yufradt, 112 edicionesanónimas
Ángulo diedro Fuente: http://es.wikipedia.org/w/index.php?oldid=55468134 Contribuyentes: Chatox007, Diegusjaimes, Gfalcone, Götz, Harpagornis, JMCC1, Nethac DIU, Nicop, Pólux,Quatus, Resped, 17 ediciones anónimas
Ángulos adyacentes Fuente: http://es.wikipedia.org/w/index.php?oldid=56346978 Contribuyentes: -jem-, Aguchoca, Aleposta, Angel GN, BlackBeast, BuenaGente, Camilo, Chivita chivas,Chuck es dios, Dark Bane, Diegusjaimes, Dreitmen, Edmenb, Ener6, Euclides, FRZ, Filipo, Foundling, Gabriel rodas, Gafotas, GermanX, Ggenellina, Greek, Gusbelluwiki, Gustronico, Götz,Humberto, Ialad, JMCC1, Jerowiki, Jkbw, Jorge 2701, Kiwii Cool, Komputisto, Laura Fiorucci, Loro 2, Lungo, Mafores, Magister Mathematicae, Manwë, Montgomery, Nioger, Ricardogpn,Sabbut, Tirithel, Travieso94, Txo, Ugly, VanKleinen, Каррильо, 132 ediciones anónimas
Ángulos entre paralelas Fuente: http://es.wikipedia.org/w/index.php?oldid=57419282 Contribuyentes: Diegusjaimes, Jerowiki, Jkbw, Juancharlie, Kiwii Cool, Marianov, Raulshc, Savh,Technopat, Zt610152145, 20 ediciones anónimas
Teorema de Desargues Fuente: http://es.wikipedia.org/w/index.php?oldid=56287788 Contribuyentes: Albertocai, Alfredobi, Andreateletrabajo, Belgrano, El Moska, Farisori, Gafotas,GermanX, Gusbelluwiki, JMCC1, Jtico, Ortisa, Poco a poco, Rondador, Sabbut, 8 ediciones anónimas
Geometría proyectiva (Matemáticas) Fuente: http://es.wikipedia.org/w/index.php?oldid=57345234 Contribuyentes: .Sergio, Allforrous, Armonico, Diegusjaimes, GermanX, Gothmog,Hiperfelix, Ingolll, Irbian, Ivn, JMCC1, Jsanchezes, Jtico, Juansempere, Maleiva, Matdrodes, Pieter, Rsg, Sanbec, SpeedyGonzalez, Szvalb, Tano4595, Troodon, Wewe, Wikisilki, Yago AB, 41ediciones anónimas
Teorema de Tales Fuente: http://es.wikipedia.org/w/index.php?oldid=57466250 Contribuyentes: .José, .Sergio, 3coma14, Acratta, Addicted04, Akma72, Alemon281194, Alex28, Allforrous, Andreasmperu, Antonorsi, Antur, Açipni-Lovrij, Baiji, Balderai, Belgrano, BlackBeast, Bostan Serai, Bucephala, BuenaGente, C h a n-Wiki, Camilo, ChristianH, Cinabrium, Ctrl Z, Cuchulainn, Dangelin5, DayL6, Delphidius, Diegusjaimes, Dnu72, Dodo, Dr Juzam, Durero, Echani, Eduardosalg, Elsenyor, Engranaje, Er Komandante, Farisori, Fmariluis, Foundling, FrancoGG, GTAVCSA, Gaeddal, Gafotas, Gaius iulius caesar, Ggenellina, Gusbelluwiki, Gusgus, Götz, HUB, Hector409a, Heliocrono, Holeco, Hprmedina, Humberto, Ialad, Igna, Isha, JMCC1, Javierito92, Jcaraballo, Jirah, Jjafjjaf, Jkbw, Jkevincl, JorgeGG, Jtico, Juan Mayordomo, Julie, Khiari, Kititta, Knax, Komputisto, LMLM, LarA, Lasneyx, Laura Fiorucci, Leonpolanco, Lopezpablo 87, Macarrones, Magister Mathematicae, Manolo felix, Manwë, MarcoAurelio, Martiko, Matdrodes, Mcac12341234, Mel 23, Merloi, Miguelal84, Miguelcr7, Moriel, Mr.Ajedrez,
Fuentes y contribuyentes del artículo 209
Nachoseli, Neleya, Netito777, Oterin, Oxilium, Petronas, Pieter, Porao, Pólux, RGLago, Racso, Rastrojo, Ravave, Ricardogpn, Richy, Rikhardum, Robin Hood, Rolling Staff, Romero Schmidtke,Rosarinagazo, Rosarino, RoyFocker, Rubpe19, Rumpelstiltskin, Rαge, Sabbut, Saloca, Sanbec, Savh, Sessho-akat, Spirit-Black-Wikipedista, SuperBraulio13, Tatvs, Technopat, Tirithel,Tupakarreloko, UA31, Vic Fede, Virgi, Vitamine, Voytek s, Wipidedia, 664 ediciones anónimas
Geometría absoluta Fuente: http://es.wikipedia.org/w/index.php?oldid=51147080 Contribuyentes: Alexquendi, Hoenheim, JMCC1, Jerowiki, Juan Mayordomo, 1 ediciones anónimas
János Bolyai Fuente: http://es.wikipedia.org/w/index.php?oldid=57692853 Contribuyentes: Aleposta, BL, Burghiu, Ceancata, Cesar.romero.avello, Dibujon, Escarlati, Farkasven, GermanX,Kubyz, Misibacsi, Pati, RGLago, 12 ediciones anónimas
Congruencia (geometría) Fuente: http://es.wikipedia.org/w/index.php?oldid=57421838 Contribuyentes: Airunp, Ale flashero, Alfredobi, Allforrous, Alvaro qc, Amir99, Andreasmperu, AngelGN, Anonimato1990, Antonorsi, Antur, Açipni-Lovrij, Baiji, Balderai, Banfield, BlackBeast, Camilo, Carmin, Cobalttempest, DEGA8, David0811, Dermot, Diegusjaimes, Dlorah, Edslov,Eduardosalg, Eloy, Emiduronte, Erfil, Ezarate, Folkvanger, Foundling, Galandil, GermanX, Greek, Götz, HiTe, Hidoy kukyo, Humberto, Igna, Isha, JMCC1, Jako78, Javierito92, Jcaraballo,Jesucristo24, JhonLoz12, Jkbw, Jorge c2010, Juan Mayordomo, Jugones55, Julie, Jurgens, Karshan, Kismalac, Leonpolanco, Leugim1972, Locos epraix, Loro 2, Lucien leGrey, Luis1970,MadriCR, Magister Mathematicae, Mansoncc, Manuelt15, Manwë, MarcoAurelio, Matdrodes, Mithrandirf III, Mutari, Netito777, Nihilo, Nioger, Nixón, Ortisa, Patricio.lorente, Pólux, Racso,Ruy Pugliesi, Saloca, Sanbec, Sancebau, Santiperez, Segedano, Shalbat, Slean1, SuperBraulio13, Tano4595, Technopat, Tirithel, UA31, Vic Fede, Vitamine, Yrithinnd, ZrzlKing, 429 edicionesanónimas
Ángulos complementarios Fuente: http://es.wikipedia.org/w/index.php?oldid=56764059 Contribuyentes: Antonorsi, Balderai, Banfield, Carcediano, Choconet01, Cinabrium, Deivismaster,Diegusjaimes, Dodo, Emijrp, Foyi62, GermanX, Greek, Grillitus, Grotedijk, Gunboy, Humberto, Isha, Ivanics, JMCC1, Jkbw, JorgeGG, Joseaperez, Jsanchezes, Karbo13, Kved, LMLM,Larocka, Loro 2, Magister Mathematicae, Mar del Sur, Matdrodes, Mecamático, Moriel, Máximo de Montemar, Netito777, Prietoquilmes, Pólux, Ricardogpn, Sabbut, Sanbec, Sasquatch21,Sigmanexus6, Snakeyes, Tano4595, Technopat, Tirithel, Todonet, UA31, Veon, Vitamine, Wilfredor, Youssefsan, Zero spartan, 128 ediciones anónimas
Ángulos suplementarios Fuente: http://es.wikipedia.org/w/index.php?oldid=56777220 Contribuyentes: Alexquendi, Açipni-Lovrij, Banfield, BuenaGente, Camilo, Carlosblh, Delphidius,Dhidalgo, Diegusjaimes, Echani, Egaida, Emijrp, Fremen, GermanX, Ggenellina, Gusbelluwiki, Ivanics, JMCC1, Jkbw, Jmvkrecords, Joseaperez, Jsanchezes, Kved, LMLM, Larocka, LauraFiorucci, Locos epraix, Loro 2, Mafores, Magister Mathematicae, Mar del Sur, Matdrodes, Mpeinadopa, Muro de Aguas, Mutari, Netito777, Oblongo, Pólux, Racso, Raulshc, Resped,Ricardogpn, Roberto Fiadone, Rubpe19, Sanbec, Sasquatch21, Savh, Tano4595, UA31, VanKleinen, Vitamine, 196 ediciones anónimas
Ángulos conjugados Fuente: http://es.wikipedia.org/w/index.php?oldid=55574928 Contribuyentes: Aleposta, Diegusjaimes, Dj-sergipe, Dreitmen, JMCC1, Loro 2, Matdrodes, Savh, 26ediciones anónimas
Ángulos consecutivos Fuente: http://es.wikipedia.org/w/index.php?oldid=57550671 Contribuyentes: Airunp, Antonorsi, Coolerica, Diegusjaimes, Emijrp, Euclides, Gustronico, JMCC1,Jerowiki, Jkbw, Joseaperez, Jsanchezes, LMLM, Larocka, Mambefa, Marlus Gancher, Mecamático, Mounstruobmx, Mpeinadopa, Ninovolador, PACO, Sanbec, Tano4595, Tirithel, Vladimirdlc,59 ediciones anónimas
Translación Fuente: http://es.wikipedia.org/w/index.php?oldid=56723694 Contribuyentes: Airunp, Davius, Diegusjaimes, Draxtreme, Elsenyor, Er Komandante, Fadesga, Farisori, Folkvanger,Greek, JAGT, Jarisleif, Madalberta, Pólux, Qoan, Ravave, Sapiensjpa, Sonett72, Taichi, Tamorlan, Λεξικόφιλος, 21 ediciones anónimas
Isometría Fuente: http://es.wikipedia.org/w/index.php?oldid=57099505 Contribuyentes: Airunp, Are 16, Baiji, Cheveri, Chiquilittle, Davius, Dianai, Diegusjaimes, Galandil, GermanX, JMCC1,Jkbw, Juan Mayordomo, Leonpolanco, ManuelGR, Matdrodes, Netito777, Ninjask, Rovnet, Satanesdan, Savh, Sebrev, SpeedyGonzalez, 54 ediciones anónimas
Grupo uniparamétrico Fuente: http://es.wikipedia.org/w/index.php?oldid=53942691 Contribuyentes: Davidsevilla, Davius, DefLog, Ggenellina
Grupo abeliano Fuente: http://es.wikipedia.org/w/index.php?oldid=55337035 Contribuyentes: Aleator, Allforrous, Davius, Dianai, Dnu72, Farisori, Fibonacci, Icvav, Ingenioso Hidalgo,Kadellar, Maldoror, Paintman, Pieter, Tano4595, Taragui, Tostadora, Wewe, 30 ediciones anónimas
Espacio recubridor Fuente: http://es.wikipedia.org/w/index.php?oldid=49148552 Contribuyentes: Aliman5040, Banana04131, Davius, Gato ocioso, Joseangelmadrid, Juan Marquez, 3ediciones anónimas
Teoría de nudos Fuente: http://es.wikipedia.org/w/index.php?oldid=55690380 Contribuyentes: Abece, Airunp, Alexav8, Anagnorisis, Copydays, Deleatur, Gato ocioso, Gustronico, JesusRodriguez, Juan Marquez, Juanpablodg, Rimac, Tano4595, UAwiki, Viorato, 22 ediciones anónimas
Espacio de Hausdorff Fuente: http://es.wikipedia.org/w/index.php?oldid=53768121 Contribuyentes: Cgb, Juan Mayordomo, Orly01, Sabbut, Tzihue, Wewe, Xtquique, 3 ediciones anónimas
Axiomas de separación Fuente: http://es.wikipedia.org/w/index.php?oldid=52907649 Contribuyentes: Airunp, Anne Bauval, Cgb, Egaida, Gato ocioso, HUB, Karv, Quetzal02, Tzihue,Xosema, Xtquique, 34 ediciones anónimas
Grupo de isometría Fuente: http://es.wikipedia.org/w/index.php?oldid=50290722 Contribuyentes: Armando-Martin, David0811, Davius, Diosa, Juan Mayordomo, Kved, Rubpe19, UAwiki, 8ediciones anónimas
Grupo puntual Fuente: http://es.wikipedia.org/w/index.php?oldid=57068161 Contribuyentes: Armando-Martin, Ykhwong
Grupo ortogonal Fuente: http://es.wikipedia.org/w/index.php?oldid=55949970 Contribuyentes: Akhram, Davius, DefLog, Drake 81, GermanX, Ingenioso Hidalgo, Jerowiki, Leonpolanco, 1ediciones anónimas
Matriz ortogonal Fuente: http://es.wikipedia.org/w/index.php?oldid=57631673 Contribuyentes: 4lex, Af3, Alhen, AntBiel, Antoniojpan, CayoMarcio, Cinabrium, Davius, Dianai, Jkbw, Jtico,Juan Mayordomo, LarA, Lasneyx, Nahuel36, Netito777, Nicoguaro, Opinador, Pieter, Sanbec, Santiago Hernández, 42 ediciones anónimas
Isometría afín Fuente: http://es.wikipedia.org/w/index.php?oldid=56878670 Contribuyentes: *el*koko0*, BludgerPan, Bucephala, BuenaGente, Camilo, Cheveri, Claudio Ray, Dak000000000,Diegusjaimes, Dinopmi, Dodo, Er Komandante, Fedaro, Foundling, Gafotas, GermanX, Ggenellina, Greek, Götz, HUB, Hprmedina, Indarkide, JMCC1, Jkbw, Juan Mayordomo, Macarrones,Maleiva, Manuel Trujillo Berges, Manwë, Matdrodes, Petruss, Pólux, Relleu, Retama, Richy, Rovnet, Ruy Pugliesi, Savh, Taichi, Technopat, Tirithel, Vic Fede, Vitamine, 225 edicionesanónimas
Matriz cuadrada Fuente: http://es.wikipedia.org/w/index.php?oldid=56150328 Contribuyentes: Af3, Cinabrium, Dhidalgo, Dnu72, Farisori, Jkbw, Malguzt, Matdrodes, Miaow Miaow,Netito777, Sabbut, Santiago Hernández, Tostadora, Xenoforme, 18 ediciones anónimas
Matriz invertible Fuente: http://es.wikipedia.org/w/index.php?oldid=57549476 Contribuyentes: Af3, Antur, Baiji, Boatbadly, CayoMarcio, Chuffo, Cinabrium, Cristian.arbe, Davius,Diegusjaimes, Dnu72, Dreitmen, Edgarjdq, EduCas, EizoOlderog, Espince, G.W.C., GermanX, Gfalcone, Gusbelluwiki, Gustavo P, Ismatemat, Jkbw, Juan Mayordomo, Kn, Linkedark,Matdrodes, Matencia29, Nimbusaeta, Norimat, Orion-Xero, Paintman, Paulienator, Pello, Pólux, Raulshc, Rdaneel, Richard8933, Roberto Fiadone, Sabbut, Technopat, XalD, 127 edicionesanónimas
Matriz traspuesta Fuente: http://es.wikipedia.org/w/index.php?oldid=57195656 Contribuyentes: Af3, BetoCG, Camilo, Cantus, CayoMarcio, Cinabrium, Crescent Moon, Daniel G. Gamonal,Deleatur, Dnu72, Humberto, Imrathor, Jordaker, Jtico, Juan Mayordomo, Maleiva, Matdrodes, P4bl1t0, Pezezin, Santiago Hernández, Trylks, 41 ediciones anónimas
Teoría de campos Fuente: http://es.wikipedia.org/w/index.php?oldid=49721852 Contribuyentes: Alefisico, BludgerPan, Davius, Hamilton-Jacobi, Macarrones, Maldoror, Segedano,Urdangaray, 6 ediciones anónimas
Matriz identidad Fuente: http://es.wikipedia.org/w/index.php?oldid=53248985 Contribuyentes: Af3, CayoMarcio, Cinabrium, Jkbw, Juan Mayordomo, Periku, Raulshc, Rcte, Renacimiento,Ricard Delgado Gonzalo, Romanm, Sabbut, Santiago Hernández, 8 ediciones anónimas
Paridad (física) Fuente: http://es.wikipedia.org/w/index.php?oldid=55979779 Contribuyentes: Alefisico, Andreasmperu, Corrector1, Correogsk, Davius, Dodo, Doreano, GermanX, JMCC1,Javichu el jefe, Jorge c2010, Magister Mathematicae, Nagul, Roberto Fiadone, Sabbut, 9 ediciones anónimas
Ortogonalidad (matemáticas) Fuente: http://es.wikipedia.org/w/index.php?oldid=57597116 Contribuyentes: Arcibel, Açipni-Lovrij, Beaire1, Biasoli, Davius, Dianai, Diegusjaimes, Digigalos,Fmariluis, Francisco Mochis, Fsd141, HUB, Hipertrofia, Hoenheim, JA Galán Baho, Jerowiki, Jkbw, Jorge c2010, Juan Mayordomo, Leonpolanco, Magister Mathematicae, PACO, Paintman,Raulshc, Savh, Szvalb, Technopat, Ty25, Wewe, Yodigo, 50 ediciones anónimas
Fuentes y contribuyentes del artículo 210
Cuaterniones y rotación en el espacio Fuente: http://es.wikipedia.org/w/index.php?oldid=55902995 Contribuyentes: 3coma14, Carlos Alberto Carcagno, Cinabrium, Cousteau, Ezarate,Folkvanger, Gato ocioso, GermanX, Juan Mayordomo, Kordas, Mario Yañez, MathsPoetry, Moriel, Nicoguaro, Pino, Romero Schmidtke, Rsg, Sabbut, Sanbec, Xtquique, 39 ediciones anónimas
Cuaternión Fuente: http://es.wikipedia.org/w/index.php?oldid=57631696 Contribuyentes: .José, Akhram, Biasoli, Cad, Carlicus, Carlos Alberto Carcagno, Charly genio, Davius, Gafotas, Gatoocioso, GermanX, Homo logos, Jtico, Juan Marquez, Jynus, Leonpolanco, Matdrodes, Nanovapor9, P.o.l.o., Pertile, Petruccigp, Pino, Ricardogpn, Tirithel, XalD, Xtquique, 31 edicionesanónimas
Sistema diédrico Fuente: http://es.wikipedia.org/w/index.php?oldid=56957780 Contribuyentes: -jem-, Allforrous, Almendro, Antur, Arbues, Artrenus, Banfield, BlackBeast, Bucephala,Camalarga, Diegusjaimes, Digigalos, Echani, Enlibertad, Fusfernando, Homologia, Hprmedina, Humberto, IvanStepaniuk, JMCC1, JaviMad, Jcuadra2, Jkbw, Jorge c2010, Juan Mayordomo,Kadellar, Lenincomp, Luis1970, Matdrodes, Miguel303xm, Ortisa, Petruss, Pólux, Raulshc, Rexmania, Savh, SpeedyGonzalez, SuperBraulio13, Teologo32, Torresaza, Troodon,WorstWikipedistEver, 84 ediciones anónimas
Elipse Fuente: http://es.wikipedia.org/w/index.php?oldid=57443245 Contribuyentes: Airunp, Alephcero, Andreasmperu, Antur, Antón Francho, Açipni-Lovrij, Balderai, BlackBeast, Buisqui,Cansado, Carcediano, Cdlfd, Charly genio, Cheveri, Csoliverez, Davius, Diegusjaimes, Digigalos, Dodo, Ecemaml, Edslov, Eduardosalg, Elabra sanchez, Electronvolt, Emmanuele, ErKomandante, Fargue, Felgest, Fismaner, Fsd141, GADESTEC, Galois76, Geolugh, GermanX, Gonis, Gusbelluwiki, Götz, HawkMoon269, Hosg, Hprmedina, Humbefa, Humberto, Imperius,Isha, JMCC1, Jaimeag, Javierito92, Jcuadra2, Jkbw, Joseaperez, Juan José Moral, Kismalac, Kordas, Laura Fiorucci, Magister Mathematicae, Makete, Malguzt, Mandarria, Mar del Sur,Matdrodes, Moran-Tao, Moriel, Nachosan, Netito777, Nicop, No sé qué nick poner, NudoMarinero, Osado, Palissy, Petruss, Porao, Proferichardperez, Psychophanta, Pybalo, Pólux, R2D2!,Ravave, Ricard Delgado Gonzalo, Ricardogpn, Rosarinagazo, Sabbut, SaeedVilla, Sauron, Snow white dntwry, Srbanana, SuperBraulio13, THINK TANK, Tano4595, Tirithel, Tomatejc, VicFede, Vitamine, Wilfredor, Xgarciaf, Xosema, Yix, Zuirdj, conversion script, 340 ediciones anónimas
Cono (geometría) Fuente: http://es.wikipedia.org/w/index.php?oldid=56932357 Contribuyentes: 3coma14, 4WD, Aleposta, Alrome, Angelgallardo4, ArwinJ, Balderai, BuenaGente,Cobalttempest, Dibujon, Diegusjaimes, Digigalos, Dodo, Echani, Elabra sanchez, Fuegon, Gafotas, Galois76, GermanX, Gusbelluwiki, Götz, Halfdrag, Hprmedina, JMCC1, Jag2k4, Jarisleif,Jgalgarra, Jkbw, Jsanchezes, Julio Uribe Padilla, Laura Fiorucci, Mafores, MarcoAurelio, Matdrodes, Micheletb, Misigon, Nethac DIU, Netito777, Oscar ., Pan con queso, Petronas, Petruss,Portland, Pólux, Raulshc, Ricardogpn, Rondador, RoyFocker, Rubpe19, Sabbut, Shooke, SuperBraulio13, Taichi, Tano4595, Technopat, Tirithel, Vitamine, XalD, 219 ediciones anónimas

Fuentes de imagen, Licencias y contribuyentes 211
Fuentes de imagen, Licencias y contribuyentesArchivo:Cono y secciones.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Cono_y_secciones.svg Licencia: Creative Commons Attribution-Share Alike Contribuyentes: DriniArchivo:Bouncing ball strobe edit.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Bouncing_ball_strobe_edit.jpg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: MichaelMaggs Edit by Richard BartzArchivo:Partes de una parábola.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Partes_de_una_parábola.svg Licencia: GNU Free Documentation License Contribuyentes:DriniArchivo:Parabola focus directrix.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Parabola_focus_directrix.svg Licencia: Public Domain Contribuyentes: PirateerArchivo:Parábola con foco y directriz.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Parábola_con_foco_y_directriz.svg Licencia: Public Domain Contribuyentes: originally,Kief, modified by DriniArchivo:Construccion de la parabola.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Construccion_de_la_parabola.svg Licencia: Creative Commons Attribution-Share Alike Contribuyentes: DriniArchivo:Parábola-lado recto.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Parábola-lado_recto.svg Licencia: Creative Commons Attribution-Share Alike Contribuyentes:DriniArchivo:Parábolas similares.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Parábolas_similares.svg Licencia: Public Domain Contribuyentes: DriniArchivo:Parábola y tangente-prueba.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Parábola_y_tangente-prueba.svg Licencia: GNU Free Documentation License Contribuyentes: DriniArchivo:Parábola origámica.ogv Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Parábola_origámica.ogv Licencia: Creative Commons Attribution-Share Alike Contribuyentes:Pedro SánchezImagen:Parab.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Parab.gif Licencia: GNU Free Documentation License Contribuyentes: Original uploader was Dbfls atfr.wikipediaImagen:Erdfunkstelle Raisting 2.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Erdfunkstelle_Raisting_2.jpg Licencia: Creative Commons Attribution-Sharealike 2.5 Contribuyentes: Richard Bartz, Munich aka Makro FreakImagen:Solarofen.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Solarofen.jpg Licencia: GNU Free Documentation License Contribuyentes: Stahlkocher, Tetris L, Warden,WstImagen:Austin Ten - Lucas head light.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Austin_Ten_-_Lucas_head_light.jpg Licencia: Public Domain Contribuyentes:Pudding4brainsArchivo:Parábolas centradas.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Parábolas_centradas.svg Licencia: Creative Commons Attribution-Share Alike Contribuyentes:DriniArchivo:Las parábolas son cuadráticas.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Las_parábolas_son_cuadráticas.svg Licencia: Public Domain Contribuyentes: DriniArchivo:Parábolas verticales.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Parábolas_verticales.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes:DriniArchivo:Ecuación de parábola vertical.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Ecuación_de_parábola_vertical.svg Licencia: Creative Commons Attribution-ShareAlike Contribuyentes: DriniArchivo:Commons-logo.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Commons-logo.svg Licencia: logo Contribuyentes: SVG version was created by User:Grunt andcleaned up by 3247, based on the earlier PNG version, created by Reidab.Archivo:Wikisource-logo.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Wikisource-logo.svg Licencia: logo Contribuyentes: Nicholas MoreauArchivo:Conic sections with plane.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Conic_sections_with_plane.svg Licencia: Creative Commons Attribution 3.0 Contribuyentes: Pbroks13Archivo:AllFourConics.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:AllFourConics.png Licencia: GNU Free Documentation License Contribuyentes: Gracenotes,Tano4595Archivo:Conics anim.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Conics_anim.gif Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: BlondandyArchivo:EpitrochoidIn3.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:EpitrochoidIn3.gif Licencia: GNU Free Documentation License Contribuyentes: Sam Derbyshire aten.wikipediaArchivo:Cycloid animated.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Cycloid_animated.gif Licencia: GNU Free Documentation License Contribuyentes: Anarkman,Siebrand, 1 ediciones anónimasArchivo:Isoperimetric inequality illustr1.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Isoperimetric_inequality_illustr1.svg Licencia: Public Domain Contribuyentes: OlegAlexandrovArchivo:Isoperimetric inequality illustr2.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Isoperimetric_inequality_illustr2.png Licencia: Public Domain Contribuyentes: OlegAlexandrovArchivo:Esfera divergencia.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Esfera_divergencia.png Licencia: Creative Commons Attribution-Sharealike 2.5 Contribuyentes:José C. MassónArchivo:Grafico 3d x2+xy+y2.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Grafico_3d_x2+xy+y2.png Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: Indeed123Archivo:X2+x+1.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:X2+x+1.png Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: Indeed123Archivo:Cone 3d.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Cone_3d.png Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes:DemonDeLuxe (Dominique Toussaint)Archivo:FiberBundle-01.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:FiberBundle-01.png Licencia: Public Domain Contribuyentes: Darapti, Dbenbenn, EugeneZelenko,Fropuff, Zscout370, 1 ediciones anónimasArchivo:Quarks.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Quarks.gif Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: QCD.gif: Manishearthderivative work: kismalacFile:ToricCodeTorus.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:ToricCodeTorus.png Licencia: Creative Commons Attribution 3.0 Contribuyentes: WoottonjamesArchivo:NaturalTransformation-01.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:NaturalTransformation-01.png Licencia: Public Domain Contribuyentes: Cirt, Darapti,EugeneZelenko, Fropuff, Ryan Reich, TimichalFile:ProductoCategoria.PNG Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:ProductoCategoria.PNG Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes:User:MarianovFile:CoProductoCategoria.PNG Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:CoProductoCategoria.PNG Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: User:MarianovImagen:Color complex plot.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Color_complex_plot.jpg Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes: Claudio RocchiniImagen:Augustin-Louis Cauchy 1901.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Augustin-Louis_Cauchy_1901.jpg Licencia: Public Domain Contribuyentes: PublicdomainImage:Parallel transport.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Parallel_transport.png Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes: Luca Antonelli (Luke Antony)Archivo:Nuvola apps edu mathematics-p.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Nuvola_apps_edu_mathematics-p.svg Licencia: GNU Lesser General Public License Contribuyentes: David Vignoni (original icon); Flamurai (SVG convertion)

Fuentes de imagen, Licencias y contribuyentes 212
Archivo:Cassini-science-br.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Cassini-science-br.jpg Licencia: Public Domain Contribuyentes: Pieter Kuiper, Steff, 1 edicionesanónimasArchivo:Albert Einstein 1979 USSR Stamp.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Albert_Einstein_1979_USSR_Stamp.jpg Licencia: Public Domain Contribuyentes:П. БендельArchivo:Gravitation space source.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Gravitation_space_source.png Licencia: GNU Free Documentation License Contribuyentes:Adam majewski, Duesentrieb, Schekinov Alexey Victorovich, Superborsuk, WikipediaMasterArchivo:Lineamundo.PNG Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Lineamundo.PNG Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes:Fmercury1980, Pieter Kuiper, Schekinov Alexey VictorovichArchivo:World line-es.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:World_line-es.svg Licencia: GNU Free Documentation License Contribuyentes: Spanish version:User:Ignacio Icke SVG version (English): K. Aainsqatsi at en.wikipedia Original PNG version: Stib at en.wikipediaArchivo:Andromeda Galaxy Spitzer.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Andromeda_Galaxy_Spitzer.jpg Licencia: Public Domain Contribuyentes:NASA/JPL-Caltech/P. Barmby (Harvard-Smithsonian Center for Astrophysics)Archivo:TensorTensiónEnergía.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:TensorTensiónEnergía.png Licencia: GNU Free Documentation License Contribuyentes:Belfer00, Fmercury1980, Kilom691, Schekinov Alexey VictorovichArchivo:Accretion disk.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Accretion_disk.jpg Licencia: Public domain Contribuyentes: 84user, Bebenko, Dcljr, Saperaud, 6ediciones anónimasArchivo:Spanish Wikiquote.SVG Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Spanish_Wikiquote.SVG Licencia: logo Contribuyentes: James.mcd.nzArchivo:Wiktionary-logo-es.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Wiktionary-logo-es.png Licencia: logo Contribuyentes: es:Usuario:PybaloArchivo:Oxyrhynchus papyrus with Euclid's Elements.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Oxyrhynchus_papyrus_with_Euclid's_Elements.jpg Licencia:desconocido Contribuyentes: -Archivo:Title page of Sir Henry Billingsley's first English version of Euclid's Elements, 1570 (560x900).jpg Fuente:http://es.wikipedia.org/w/index.php?title=Archivo:Title_page_of_Sir_Henry_Billingsley's_first_English_version_of_Euclid's_Elements,_1570_(560x900).jpg Licencia: Public Domain Contribuyentes: Charles Thomas-StanfordImage:Triangles (spherical geometry).jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Triangles_(spherical_geometry).jpg Licencia: GNU Free Documentation License Contribuyentes: Lars H. Rohwedder, SarregousetArchivo:Ecuación cuadrática.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Ecuación_cuadrática.svg Licencia: Creative Commons Attribution-Share Alike Contribuyentes:DriniArchivo:Quadratic equation discriminant.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Quadratic_equation_discriminant.png Licencia: Creative CommonsAttribution-ShareAlike 3.0 Unported Contribuyentes: KSmrqArchivo:Wikibooks-logo.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Wikibooks-logo.svg Licencia: logo Contribuyentes: User:Bastique, User:Ramac et al.Archivo:Perpendicular bisector.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Perpendicular_bisector.gif Licencia: Public Domain Contribuyentes: IxnayArchivo:Cercle mediatrice corde.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Cercle_mediatrice_corde.png Licencia: GNU Free Documentation License Contribuyentes:Christophe Dang Ngoc Chan Cdang at fr.wikipediaArchivo:Cercle circonscrit à un triangle.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Cercle_circonscrit_à_un_triangle.svg Licencia: Creative CommonsAttribution-Sharealike 3.0,2.5,2.0,1.0 Contribuyentes: Bvs-acaArchivo:Axisimetria.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Axisimetria.png Licencia: Public Domain Contribuyentes: DaviusArchivo:Tiny Jelly.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Tiny_Jelly.jpg Licencia: Creative Commons Attribution 2.0 Contribuyentes: Liné1, PDH, VernoWhitneyArchivo:Focal-length.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Focal-length.svg Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes:HenrikArchivo:Nikkor 35mm 2.0 AI (2044668876).jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Nikkor_35mm_2.0_AI_(2044668876).jpg Licencia: Creative Commons Attribution2.0 Contribuyentes: Daniel Martini from Stockholm, SwedenArchivo:Two parallel lines a b.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Two_parallel_lines_a_b.svg Licencia: Public Domain Contribuyentes: MasurArchivo:Planes parallel.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Planes_parallel.svg Licencia: Public Domain Contribuyentes: QefFile:PuntosAfín.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:PuntosAfín.svg Licencia: Creative Commons Zero Contribuyentes: User:MarianovFile:EspacioAfín1.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:EspacioAfín1.svg Licencia: Creative Commons Zero Contribuyentes: User:MarianovFile:EspacioAfín2.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:EspacioAfín2.svg Licencia: Creative Commons Zero Contribuyentes: User:MarianovFile:EspacioAfín1b.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:EspacioAfín1b.svg Licencia: Creative Commons Zero Contribuyentes: User:MarianovFile:VectorNulo.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:VectorNulo.svg Licencia: Creative Commons Zero Contribuyentes: User:MarianovArchivo:Manhattan distance.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Manhattan_distance.svg Licencia: Public Domain Contribuyentes: User:PsychonautArchivo:ortodroma.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Ortodroma.svg Licencia: GNU Free Documentation License Contribuyentes: OremArchivo:Perpendicular-coloured.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Perpendicular-coloured.svg Licencia: GNU Free Documentation License Contribuyentes:JMCC1, Nk, RDBury, 2 ediciones anónimasArchivo:Perpendicular-construction.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Perpendicular-construction.svg Licencia: GNU Free Documentation License Contribuyentes: Darapti, NkArchivo:perpendicular transversal v3.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Perpendicular_transversal_v3.svg Licencia: Creative Commons Attribution-ShareAlike3.0 Unported Contribuyentes: Benzi455Archivo:Dihedron.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Dihedron.png Licencia: Public Domain Contribuyentes: Nethac DIU, from Spanish WikipediaArchivo:Angulos_adyacentes.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Angulos_adyacentes.png Licencia: Free Art License Contribuyentes: Original uploader wasLarocka at es.wikipediaArchivo:Consecutive angles.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Consecutive_angles.svg Licencia: Free Art License Contribuyentes: Larocka, SVG:Marlus_GancherFile:Theorem 11.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Theorem_11.svg Licencia: Public Domain Contribuyentes: User:School geniusFile:Parallel_transversal.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Parallel_transversal.svg Licencia: Creative Commons Zero Contribuyentes: User:KrishnavedalaArchivo:Thales theorem 6.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Thales_theorem_6.png Licencia: GNU Free Documentation License Contribuyentes: Cflm001,Dake, HB, STyx, 4 ediciones anónimasArchivo:Desargues on Parallels.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Desargues_on_Parallels.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: User:KlioKleinArchivo:Thales-sov.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Thales-sov.jpg Licencia: Public Domain Contribuyentes: Jusjih, Tosha, 1 ediciones anónimasArchivo:Triángulos semejantes Tales.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Triángulos_semejantes_Tales.png Licencia: GNU Free Documentation License Contribuyentes: Original uploader was Sauron at es.wikipediaFile:Cong AAA.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Cong_AAA.png Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes: Sap00acmArchivo:Parallel postulate en.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Parallel_postulate_en.svg Licencia: GNU Free Documentation License Contribuyentes: Darapti,DickdockArchivo:Angle alt int.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Angle_alt_int.png Licencia: Creative Commons Attribution-Share Alike Contribuyentes: GastelEtzwaneArchivo:Triangle trirectangle.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Triangle_trirectangle.png Licencia: Creative Commons Attribution-Sharealike 3.0,2.5,2.0,1.0 Contribuyentes: Coyau, JMCC1

Fuentes de imagen, Licencias y contribuyentes 213
Archivo:Hyperbolic triangle.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Hyperbolic_triangle.svg Licencia: Public Domain Contribuyentes: Bender235, Kieff, 1 edicionesanónimasArchivo:Horocycle normals.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Horocycle_normals.svg Licencia: Creative Commons Attribution 3.0 Contribuyentes: ClaudioRocchiniImagen:Teorema de desargues.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Teorema_de_desargues.svg Licencia: Public Domain Contribuyentes: JticoImagen:Desteodem.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Desteodem.svg Licencia: Public Domain Contribuyentes: JticoArchivo:Drawing Square in Perspective 2.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Drawing_Square_in_Perspective_2.gif Licencia: Public Domain Contribuyentes:YlebruArchivo:Thales.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Thales.jpg Licencia: Public Domain Contribuyentes: Bibi Saint-Pol, TomistiArchivo:Thaleskreis.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Thaleskreis.png Licencia: Public Domain Contribuyentes: Original uploader was Hubi at de.wikipediaArchivo:Thales theorem 7.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Thales_theorem_7.png Licencia: GNU Free Documentation License Contribuyentes: Amada44,Dake, HB, 1 ediciones anónimasArchivo:Thales' Theorem Simple.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Thales'_Theorem_Simple.svg Licencia: Public Domain Contribuyentes: InductiveloadArchivo:Animated illustration of thales theorem.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Animated_illustration_of_thales_theorem.gif Licencia: Public domain Contribuyentes: dino (talk) (Boulder, CO, USA)Archivo:Thales' Theorem.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Thales'_Theorem.svg Licencia: Public Domain Contribuyentes: InductiveloadArchivo:Thales' Theorem Tangents.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Thales'_Theorem_Tangents.svg Licencia: Public Domain Contribuyentes: InductiveloadArchivo:Thales_theorem_6.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Thales_theorem_6.png Licencia: GNU Free Documentation License Contribuyentes: Cflm001,Dake, HB, STyx, 4 ediciones anónimasArchivo:JanosBolyai.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:JanosBolyai.jpg Licencia: Public Domain Contribuyentes: Bender235, Csanády, Pati, 1 ediciones anónimasArchivo:Congruentie.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Congruentie.svg Licencia: Public Domain Contribuyentes: Original uploader was MADe at nl.wikipediaImagen:OppositeAngles.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:OppositeAngles.svg Licencia: Creative Commons Zero Contribuyentes: kismalacImagen:Parallelogram2.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Parallelogram2.svg Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes:Quadrilaterals.svg: User:Acdx derivative work: kismalacArchivo:Angulos_complementarios.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Angulos_complementarios.png Licencia: Free Art License Contribuyentes: Originaluploader was Larocka at es.wikipediaImagen:Angulos_suplementarios.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Angulos_suplementarios.png Licencia: Free Art License Contribuyentes: Original uploaderwas Larocka at es.wikipediaArchivo:Ângulo explementar.PNG Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Ângulo_explementar.PNG Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes: Rimshot, Thiago R Ramos, 2 ediciones anónimasFile:Consecutive angles.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Consecutive_angles.svg Licencia: Free Art License Contribuyentes: Larocka, SVG: Marlus_GancherArchivo:Covering map.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Covering_map.png Licencia: GNU Free Documentation License Contribuyentes: EugeneZelenko,Yonatan, 2 ediciones anónimasArchivo:Trivial knots 3D.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Trivial_knots_3D.png Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes: YAMASHITA MakotoArchivo:knot 8sb19.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Knot_8sb19.jpg Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes:Dbenbenn, EugeneZelenko, Marnanel, 1 ediciones anónimasArchivo:Reidemeister move 1.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Reidemeister_move_1.png Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes: YAMASHITA MakotoArchivo:Reidemeister move 2.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Reidemeister_move_2.png Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes: YAMASHITA MakotoArchivo:Reidemeister move 3.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Reidemeister_move_3.png Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes: YAMASHITA MakotoImagen:Hausdorff space.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Hausdorff_space.svg Licencia: Copyrighted free use Contribuyentes: FibonacciArchivo:dihedral4.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Dihedral4.png Licencia: GNU Free Documentation License Contribuyentes: MaksimArchivo:Flag of Hong Kong.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Flag_of_Hong_Kong.svg Licencia: Public Domain Contribuyentes: Designed by (en inglés)Archivo:CDel_node.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:CDel_node.png Licencia: Public Domain Contribuyentes: User:TomruenArchivo:CDel node.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:CDel_node.png Licencia: Public Domain Contribuyentes: User:TomruenArchivo:CDel 3.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:CDel_3.png Licencia: Public Domain Contribuyentes: User:TomruenArchivo:CDel 4.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:CDel_4.png Licencia: Public Domain Contribuyentes: User:TomruenArchivo:CDel 5.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:CDel_5.png Licencia: Public Domain Contribuyentes: User:TomruenArchivo:CDel 6.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:CDel_6.png Licencia: Public Domain Contribuyentes: User:TomruenArchivo:CDel n.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:CDel_n.png Licencia: Public Domain Contribuyentes: User:TomruenArchivo:CDel 2x.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:CDel_2x.png Licencia: Public Domain Contribuyentes: User:TomruenArchivo:CDel 2.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:CDel_2.png Licencia: Public Domain Contribuyentes: User:TomruenArchivo:CDel split1.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:CDel_split1.png Licencia: Public Domain Contribuyentes: User:TomruenArchivo:CDel nodes.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:CDel_nodes.png Licencia: Public Domain Contribuyentes: User:TomruenArchivo:Mirror.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Mirror.jpg Licencia: GNU Free Documentation License Contribuyentes: CgsArchivo:Traslacion.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Traslacion.png Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes: RovnetArchivo:Traslacion triangulo.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Traslacion_triangulo.png Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes: RovnetArchivo:Simetria central.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Simetria_central.png Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes: RovnetArchivo:Simetria central triangulo.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Simetria_central_triangulo.png Licencia: Creative Commons Attribution-ShareAlike 3.0Unported Contribuyentes: RovnetArchivo:Simetria axial.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Simetria_axial.png Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes:RovnetArchivo:Simetria axial triangulo.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Simetria_axial_triangulo.png Licencia: Creative Commons Attribution-ShareAlike 3.0Unported Contribuyentes: RovnetArchivo:Rotacion.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Rotacion.png Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes: RovnetImage:VFPt charges plus minus thumb.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:VFPt_charges_plus_minus_thumb.svg Licencia: Creative CommonsAttribution-Sharealike 3.0 Contribuyentes: Geek3Archivo:Feynmann Diagram Gluon Radiation.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Feynmann_Diagram_Gluon_Radiation.svg Licencia: Creative CommonsAttribution-ShareAlike 3.0 Unported Contribuyentes: Joel Holdsworth (Joelholdsworth)Archivo:parity 1drep.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Parity_1drep.png Licencia: Public Domain Contribuyentes: Conscious, Kri, Maksim, 1 edicionesanónimas

Fuentes de imagen, Licencias y contribuyentes 214
Archivo:William_Rowan_Hamilton_Plaque_-_geograph.org.uk_-_347941.jpg Fuente:http://es.wikipedia.org/w/index.php?title=Archivo:William_Rowan_Hamilton_Plaque_-_geograph.org.uk_-_347941.jpg Licencia: Creative Commons Attribution-Share Alike 2.0 Generic Contribuyentes: Anne Bauval, SilverblasterArchivo:Orthographic projections of L shape.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Orthographic_projections_of_L_shape.png Licencia: Public Domain Contribuyentes: ZinkArchivo:First angle projection.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:First_angle_projection.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: EmokArchivo:Brockhaus and Efron Encyclopedic Dictionary b40 773-1.jpg Fuente:http://es.wikipedia.org/w/index.php?title=Archivo:Brockhaus_and_Efron_Encyclopedic_Dictionary_b40_773-1.jpg Licencia: Public Domain Contribuyentes: painter from Brockhaus and EfronEncyclopedic DictionaryArchivo:Brockhaus and Efron Encyclopedic Dictionary b40 773-2.jpg Fuente:http://es.wikipedia.org/w/index.php?title=Archivo:Brockhaus_and_Efron_Encyclopedic_Dictionary_b40_773-2.jpg Licencia: Public Domain Contribuyentes: painter from Brockhaus and EfronEncyclopedic DictionaryArchivo:Brockhaus and Efron Encyclopedic Dictionary b40 773-3.jpg Fuente:http://es.wikipedia.org/w/index.php?title=Archivo:Brockhaus_and_Efron_Encyclopedic_Dictionary_b40_773-3.jpg Licencia: Public Domain Contribuyentes: painter from Brockhaus and EfronEncyclopedic DictionaryArchivo:Brockhaus and Efron Encyclopedic Dictionary b40 773-4.jpg Fuente:http://es.wikipedia.org/w/index.php?title=Archivo:Brockhaus_and_Efron_Encyclopedic_Dictionary_b40_773-4.jpg Licencia: Public Domain Contribuyentes: painter from Brockhaus and EfronEncyclopedic DictionaryArchivo:Brockhaus and Efron Encyclopedic Dictionary b40 774-3.jpg Fuente:http://es.wikipedia.org/w/index.php?title=Archivo:Brockhaus_and_Efron_Encyclopedic_Dictionary_b40_774-3.jpg Licencia: Public Domain Contribuyentes: painter from Brockhaus and EfronEncyclopedic DictionaryArchivo:Perspective isometrique exemple piece revolution.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Perspective_isometrique_exemple_piece_revolution.svg Licencia:Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes: Christophe Dang Ngoc Chan (cdang)Archivo:ElipseAnimada.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:ElipseAnimada.gif Licencia: GNU Free Documentation License Contribuyentes: AlephceroArchivo:Borchardt-ellipse-Louxor.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Borchardt-ellipse-Louxor.jpg Licencia: Public Domain Contribuyentes: Ludwig BorchardtArchivo:Ellipse Properties of Directrix and String Construction.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Ellipse_Properties_of_Directrix_and_String_Construction.svg Licencia: desconocido Contribuyentes: Ellipse_Properties.svg: Inductiveload derivative work: Dave3457 (talk)Archivo:Elipse1.0.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Elipse1.0.jpg Licencia: Creative Commons Attribution 3.0 Contribuyentes: Moran-TaoArchivo:Ellipse Animation Small.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Ellipse_Animation_Small.gif Licencia: GNU Free Documentation License Contribuyentes:User:NoPetrolArchivo:Ellipse Properties of Directrix.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Ellipse_Properties_of_Directrix.svg Licencia: Public Domain Contribuyentes:Ellipse_Properties.svg: Inductiveload derivative work: Dave3457 (talk)Archivo:Ellipse Polar.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Ellipse_Polar.svg Licencia: Public Domain Contribuyentes: InductiveloadArchivo:Elps-slr.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Elps-slr.svg Licencia: Public Domain Contribuyentes: Original uploader was Mikm at en.wikipediaArchivo:Conicas1.PNG Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Conicas1.PNG Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes: MarceloReisArchivo:Ellipse as hypotrochoid.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Ellipse_as_hypotrochoid.gif Licencia: GNU Free Documentation License Contribuyentes: DinoArchivo:Parametric ellipse.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Parametric_ellipse.gif Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes:09glasgow09Archivo:Circulo 001 tt.JPG Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Circulo_001_tt.JPG Licencia: Public Domain Contribuyentes: Think TankArchivo:Circulo 002 ttt.JPG Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Circulo_002_ttt.JPG Licencia: Public Domain Contribuyentes: Think TankArchivo:Orbitas-Kepler-segunda-ley-01.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Orbitas-Kepler-segunda-ley-01.svg Licencia: Creative Commons Zero Contribuyentes:GusbelluwikiArchivo:Cone.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Cone.jpg Licencia: GNU Free Documentation License Contribuyentes: Conscious, Knutux, RanveigArchivo:ConeDev.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:ConeDev.svg Licencia: Creative Commons Attribution-Sharealike 3.0,2.5,2.0,1.0 Contribuyentes: HBArchivo:Doppelkegel.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Doppelkegel.png Licencia: Public Domain Contribuyentes: Kilom691, Svdmolen

Licencia 215
LicenciaCreative Commons Attribution-Share Alike 3.0 Unported//creativecommons.org/licenses/by-sa/3.0/