j.pdf
6
7/21/2019 j.pdf http://slidepdf.com/reader/full/jpdf5695d13b1a28ab9b0295ac97 1/6 ESCUELA POLIT ´ ECNICA NACIONAL FACULTAD DE INGENIER ´ IA MEC ´ ANICA DIN ´ AMICA DE SISTEMAS M ´ ETODOS DE SOLUCI ´ ON DE ECUACI ´ ONES DIFERENCIALES NOMBRE: Y´ anez Omar FECHA: 2014/04/22 CLASIFICACI ´ ON SEG ´ UN LA LINEALIDAD O LA NO LINEALIDAD. Las ecuaciones diferenciales lineales se caracterizan porque: La variable dependiente (y) junto conc todas sus derivadas son de primer grado, es decir, la potencia de cada termino en (y) es 1. La variable dependiente (y) aparece libre de un operador. Cada coeficiente depende s´ olo de la derivada independiente (x). Ejemplo: x.dy + y.dx = 0 y” + 2y’ + y = 0 Las ecuaciones diferenciales no lineal se caracterizan porque: Ejemplo: y.y” + 2.y’ = 0 1. M ´ ETODOS DE SOLUCI ´ ON DE E.D. ORDINARIAS. 1.1. M´ etodo de soluci´ on num´ erica. M´ etodo en diferencias finitas. Consiste en aproximar las derivadas de una funci´on en un punto mediante una combi- naci´ on de las im´agenes de la funci´on en puntos del entorno (los puntos de la malla). La herramienta que nos proporciona tales formulas, denominadas de “diferencias finitas”, es el desarrollo de Taylor de una funci´on en un punto. En primer lugar hallemos la formula de aproximaci´on de la primera derivada: donde hemos utilizado la f´ormula del resto de Cauchy. Despejando y’(t) de la ecuaci´on anterior podemos hallar su valor 1
Transcript of j.pdf

7/21/2019 j.pdf
http://slidepdf.com/reader/full/jpdf5695d13b1a28ab9b0295ac97 1/6
ESCUELA POLITECNICA NACIONALFACULTAD DE INGENIERIA MECANICA
DINAMICA DE SISTEMAS
METODOS DE SOLUCION DE ECUACIONES DIFERENCIALES
NOMBRE: Yanez Omar
FECHA: 2014/04/22
CLASIFICACION SEGUN LA LINEALIDAD O LA NO LINEALIDAD.
Las ecuaciones diferenciales lineales se caracterizan porque:
La variable dependiente (y) junto conc todas sus derivadas son de primer grado, es decir,la potencia de cada termino en (y) es 1.
La variable dependiente (y) aparece libre de un operador.
Cada coeficiente depende solo de la derivada independiente (x).
Ejemplo:
x.dy + y.dx = 0
y” + 2y’ + y = 0
Las ecuaciones diferenciales no lineal se caracterizan porque:
Ejemplo:
y.y” + 2.y’ = 0
1. METODOS DE SOLUCION DE E.D. ORDINARIAS.
1.1. Metodo de solucion numerica.
Metodo en diferencias finitas.Consiste en aproximar las derivadas de una funci on en un punto mediante una combi-nacion de las imagenes de la funcion en puntos del entorno (los puntos de la malla). La
herramienta que nos proporciona tales formulas, denominadas de “diferencias finitas”, esel desarrollo de Taylor de una funcion en un punto.
En primer lugar hallemos la formula de aproximacion de la primera derivada:
donde hemos utilizado la formula del resto de Cauchy. Despejando y’(t) de la ecuaci on
anterior podemos hallar su valor
1

7/21/2019 j.pdf
http://slidepdf.com/reader/full/jpdf5695d13b1a28ab9b0295ac97 2/6
ESCUELA POLITECNICA NACIONALFACULTAD DE INGENIERIA MECANICA
DINAMICA DE SISTEMAS
de donde obtenemos la aproximacion
La formula anterior se denomina diferencia progresiva de la primera derivada. Observeseque el error de la aproximacion es proporcional a h, que lo expresaremos diciendo quees una aproximacion de primer orden. Cuando interese poner de manifiesto el orden deaproximacion omitiremos el resto de Cauchy escribiendo simplemente
donde el termino O(h) se refiere a que el termino proporcional a (h) esta acotado por unmultiplo constante de (h) cuando (h) tiende a cero. Realizando el desarrollo de Taylor dey(t - h) y procediendo de forma similar se obtiene una nueva formula de aproximacionpara y0(t), pero esta vez en funcion de los valores de u en el nodo t y (t - h),
En este caso, la formula aproximacion obtenida se denomina diferencia regresiva de laprimera derivada. Las diferencias progresivas y regresivas son aproximaciones de primerorden a la primera derivada en t. Pero no son estas las unicas posibilidades para aproximarla primera derivada. Consideremos los siguientes desarrollos de Taylor:
donde el resto de Taylor es proporcional a h3. Si restamos las formulas anteriores obtene-
mos
de donde se obtiene facilmente:
Metodo de Euler.
Consiste en calcular una aproximacion a la unica solucion para el problema de valor inicial(1.1). En primer lugar, introducimos una malla de puntos (puntos nodales) comenzandoen el instante inicial t0 y acabando en el tiempo final tN = t0 + α de la forma
2

7/21/2019 j.pdf
http://slidepdf.com/reader/full/jpdf5695d13b1a28ab9b0295ac97 3/6
ESCUELA POLITECNICA NACIONALFACULTAD DE INGENIERIA MECANICA
DINAMICA DE SISTEMAS
t0 < t1 < t2 < ... < tk < ... < tN
donde la distancia entre un nodo y otro hk = t(k + 1)− tk este suficientemente cerca. Porcomodidad, utilizaremos una separacion uniforme entre los puntos del mallado, esto es,hk = h fijo para todo k. Este requisito simplifica el analisis sin afectar significativamenteal estudio general para pasos no uniformes.
En este caso, el punto k-esimo de la malla esta dado por tk = t(0) + kh. El proposito esconstruir un algoritmo recursivo que proporcione aproximaciones U k ≈ y(tk) de la solucionreal en los puntos nodales k = 0, 1, 2,..., elegidos. Los valores de y (t) en los puntosinternodales se pueden calcular mediante cualquier procedimiento de interpolacion, porejemplo, los splines cubicos. El polinomio de Taylor de primer orden permite aproximar
el valor de la funcion y (t) alrededor de cualquier nodo tk:
donde hemos reemplazado la derivada y0(t) por el termino que aparece en la ecuacion(1.1) objeto de estudio. En particular, si tomamos t = tk +1 , podemos aproximar el valordel siguiente punto nodal de la malla
y(tk+1) ≈ y(tk) + (tk+1 − tk)f (tk; y(tk)) (1.3)
En la practica solamente sabemos la aproximacion uk al valor y(tk), luego estamos obli-gados a reemplazar uk por y(tk) en la formula (1.3), por lo tanto obtenemos el esquemaiterativo:
uk+[1 = uk + hf (tk; uk) (1.4)
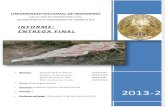
Esta simple idea es el punto de partida del metodo de Euler. Este metodo es el esquemanumerico unipaso mas simple para integrar una ecuacion diferencial ordinaria. Con elfin de comprender mejor el metodo de Euler en la practica, es conveniente testearlo conalgun problema sencillo que sepamos resolver, lo que permite estudiar el error de nuestraaproximacion con la solucion real.
figura1,1 : y0 + u = 2.cost; u(0) = 2
3

7/21/2019 j.pdf
http://slidepdf.com/reader/full/jpdf5695d13b1a28ab9b0295ac97 4/6
ESCUELA POLITECNICA NACIONALFACULTAD DE INGENIERIA MECANICA
DINAMICA DE SISTEMAS
1.2. Transformada de Laplace.
Consideremos el conjunto Ω formado por las funciones de una variable real t con valoresen C cuyo dominio contiene los reales positivos y un entorno del cero y son continuas atrozos (es decir, las discontinuidades de la funcion son de salto finito y el conjunto depuntos de discontinuidad no tiene puntos de acumulacion finitos, o lo que es lo mismo, encada intervalo compacto hay un numero finito de discontinuidades de salto finito).
A todos los efectos se consideraran como iguales dos funciones continuas a trozos quecoincidan en [0,∞) salvo en sus puntos de discontinuidad. Si se prefiere, podemos traba- jar con clases de equivalencia de funciones que coinciden salvo en un conjunto sin puntos
de acumulacion finito. En consecuencia, en un punto de discontinuidad, no tiene sentidohablar de f(a) si no de f (a+) y f (a−).
Definicion 1.1: Dada una funcion f ∈ Ω llamamos transformada de Laplace de f a lafuncion F definida por F (s) =
∞
0 f(t).e−st.dt
2. METODOS DE SOLUCION DE E.D. PARCIALES
2.1. Separacion de Variables.
El metodo de separacion de variables consiste en proponer un ansatz en el que la funcion u sepuede escribir como una funcion que depende del tiempo y otras que dependen de las dem asvariables, es decir, como
u = X(x).Y(y).Z(z).T(t)
2.2. Metodo de series de Fourier.
Otro metodo muy utilizado para resolver las ecuaciones diferenciales es de nuevo el metodo dedesarrollo de Fourier. Usaremos los resultados del capıtulo anterior para resolver las ecuaciones
en derivadas parciales. Para esto es mejor estudiar algunos ejemplos.
2.3. Metodos de funciones de Green.
Para la resolucion de ecuaciones diferenciales no homogeneas existe una tecnica llamada funcionde Green. Basicamente consiste en escribir la funcion solucion y la funcion de la parte nohomogenea, en terminos de una base del espacio de Hilbert correspondiente. Por sencillez seescoge la base correspondiente a las soluciones de la ecuacion homogenea. Vamos a ver esto.
Algoritmo 37 Sea Lu = 0 una ecuacion diferencial. Sea Luk–λkuk = 0 una ecuacion diferencialcon soluciones uk en un espacio de Hilbert con el producto interno (f, g) =
f g, siendo (uk)k∈I
una base de este espacio de Hilbert. Sea Lu − λu = f
La ecuacion diferencial no homogenea que queremos resolver. Podemos escribir la funci on u yla funcion f en terminos de la base (uk)k∈I , usando la serie de Fourier en la base (uk)k∈I , esdecir:
4

7/21/2019 j.pdf
http://slidepdf.com/reader/full/jpdf5695d13b1a28ab9b0295ac97 5/6
ESCUELA POLITECNICA NACIONALFACULTAD DE INGENIERIA MECANICA
DINAMICA DE SISTEMAS
Si substituimos esto en la ecuacion diferencial no homogenea, se obtiene
como uk es una base del espacio de Hilbert, se sigue que las constantes ck deben cumplir
Entonces la solucion de la ecuacion diferencial no homogenea sera
Denicion 38 A la funcion
se le llama funcion de Green.
Definicion 39 A las funciones uk soluciones de la ecuacion Lukλkuk = 0 se les llama funcionespropias del operador L y a las constantes λk se les conoce como valores propios del operadorL. En terminos de la funcion de Green, la solucion de la ecuacion diferencial no homogenea seescribe como
5

7/21/2019 j.pdf
http://slidepdf.com/reader/full/jpdf5695d13b1a28ab9b0295ac97 6/6
ESCUELA POLITECNICA NACIONALFACULTAD DE INGENIERIA MECANICA
DINAMICA DE SISTEMAS
BIBLIOGRAFIA:
• Juan E. Nunez O.;Ecuaciones Diferenciales; Ecuador; 1ra Ed.; 2010; Capıtulo 15;Pag. 5-6.
• C. Paulogorron y C. Perez; Calculo matematico con DERIVE para PC; Ed. RA-MA;1ra Ed.; 1994.
• J. STEWART Calculo; 2a ed; Grupo Editorial Iberoamerica; Mexico;1994; Capıtulo15.
• R.E. LARSON, R.P. HOSTETLER y B.H. EDWARDS; Calculo y Geometrıa Analıtica;5ta ed.;vol. 1; McGraw- Hill, Madrid, 1995. Capıtulo 18.
6