Modelo de plasticidad multiaxial para arcillas …€¦ · Cálculo y Diseno en Ingeniería ......
23
Vol. 15, 2, 169-191 (1999) Revista Internacional de Métodos Numéricos para Cálculo y Diseno en Ingeniería Modelo de plasticidad multiaxial para arcillas sometidas a carga dinámica Francisco Javier Montáns Leal Escuela Técnica Superior de Ingenieros Industriales Gniversidad de Castilla La Mancha 13071 Ciudad Real, España Tel.: 926-29 53 0013806, Fax: 926-29 53 61 e-mail: fmontansQind-cr.uc1m.e~ Ronaldo 1. Borja Department of Civil Engineering-Terman Engineering Center Stanford University Stanford, California 94305, E.U.A. Tel.: 1-650-723 36 64, Fax: 1-650-723 75 14 e-mail: borjaQcive.stanford.edu Resumen En este artículo se desarrolla un modelo de plasticidad de superficie límite para suelos cohesivos sin drenaje dotado de un algoritmo capaz de manejar tanto carga dinámica multiaxial como la ausencia de rango elástico. Dicho algoritmo puede ser implementado en cualquier programa de elementos finitos. En el desarrollo de la formulación continua se siguen los mismos pasos que en la plasticidad clásica. I\/Iodelos monodimensionales tradicionales como el exponencial, hiperbólico, de Davidenkov o el de Ramberg-Osgood pueden ser poyectados en el dominio de tensiones desviadoras y extendidos sitemáticamente a las tres dimensiones espaciales. 'En particular, el modelo exponencial se ha relevado apropiado para suelos cohesivos y ha sido utilizado en este trabajo. Los parámetros internos del mismo se obtienen directamente de las curvas típicas de reducción del módulo a cortante, de perfiles de velocidades de ondas a cortante y/o de ensayos de penetración. Para analizar el comportamiento del modelo, se le expone tanto a cargas monoaxiales como a multiaxiales y tanto a cargas cuasiestáticas como a sísmicas. Además, el modelo desarrollado es especialmente útil en interacción suelo-estructura tridimensional e incluso requiere menos parámetros que modelos lineales monodimensionales equivalentes, usados habitualmente en ingeniería geotécnica. PLASTICITY MODEL FOR CLAYS UNDER MULTIAXIAL NONPROPORTIONAL LOADING Summary An associative bounding surface plasticity model for undrained clays and an algorithm capable of handling both multiaxial dynamic loading and the absence of elastic range is developed. The algorithm is suitable of being implemented in any finite elements code. When developing the continuum theory, the classical plasticity steps are followed. Traditional monodimensional models such as the hyperbolic, exponential, Davidenkov and Ramberg-Osgood can be mapped in the deviatoric domain, casted in the overall layout and extended to the 3D reality in a systematic way. Specifically, the exponential model has been shown appropriate for cohesive soils and therefore it is used in this study. The interna1 parameters of the mapping of the exponential model are easily obtained from the traditional shear moduli reduction curves: shear wave velocity profiles and/or SPT blowcounts. The behavior of the model is investigated in both monotonic and dynamic loading, and in both monodimensional and in three-dimensional loading. The model is specially useful in 3D soil-structure interaction and requires less parameters than the equivalent linear models commonly used in geotechnical earthquake engineering. OUniversitat Politkcnica de Catalunya (España). ISSN: 0213-1315 Recibido: Diciembre 1997
Transcript of Modelo de plasticidad multiaxial para arcillas …€¦ · Cálculo y Diseno en Ingeniería ......

Vol. 15, 2, 169-191 (1999) Revista Internacional de Métodos Numéricos para
Cálculo y Diseno en Ingeniería
Modelo de plasticidad multiaxial para arcillas sometidas a carga dinámica Francisco Javier Montáns Leal Escuela Técnica Superior de Ingenieros Industriales Gniversidad de Castilla La Mancha 13071 Ciudad Real, España Tel.: 926-29 53 0013806, Fax: 926-29 53 61 e-mail: fmontansQind-cr.uc1m.e~
Ronaldo 1. Borja Department of Civil Engineering-Terman Engineering Center Stanford University Stanford, California 94305, E.U.A. Tel.: 1-650-723 36 64, Fax: 1-650-723 75 14 e-mail: borjaQcive.stanford.edu
Resumen
En este artículo se desarrolla un modelo de plasticidad de superficie límite para suelos cohesivos sin drenaje dotado de un algoritmo capaz de manejar tanto carga dinámica multiaxial como la ausencia de rango elástico. Dicho algoritmo puede ser implementado en cualquier programa de elementos finitos. En el desarrollo de la formulación continua se siguen los mismos pasos que en la plasticidad clásica. I\/Iodelos monodimensionales tradicionales como el exponencial, hiperbólico, de Davidenkov o el de Ramberg-Osgood pueden ser poyectados en el dominio de tensiones desviadoras y extendidos sitemáticamente a las tres dimensiones espaciales. 'En particular, el modelo exponencial se ha relevado apropiado para suelos cohesivos y ha sido utilizado en este trabajo. Los parámetros internos del mismo se obtienen directamente de las curvas típicas de reducción del módulo a cortante, de perfiles de velocidades de ondas a cortante y/o de ensayos de penetración. Para analizar el comportamiento del modelo, se le expone tanto a cargas monoaxiales como a multiaxiales y tanto a cargas cuasiestáticas como a sísmicas. Además, el modelo desarrollado es especialmente útil en interacción suelo-estructura tridimensional e incluso requiere menos parámetros que modelos lineales monodimensionales equivalentes, usados habitualmente en ingeniería geotécnica.
PLASTICITY MODEL FOR CLAYS UNDER MULTIAXIAL NONPROPORTIONAL LOADING
Summary
An associative bounding surface plasticity model for undrained clays and an algorithm capable of handling both multiaxial dynamic loading and the absence of elastic range is developed. The algorithm is suitable of being implemented in any finite elements code. When developing the continuum theory, the classical plasticity steps are followed. Traditional monodimensional models such as the hyperbolic, exponential, Davidenkov and Ramberg-Osgood can be mapped in the deviatoric domain, casted in the overall layout and extended to the 3D reality in a systematic way. Specifically, the exponential model has been shown appropriate for cohesive soils and therefore it is used in this study. The interna1 parameters of the mapping of the exponential model are easily obtained from the traditional shear moduli reduction curves: shear wave velocity profiles and/or SPT blowcounts. The behavior of the model is investigated in both monotonic and dynamic loading, and in both monodimensional and in three-dimensional loading. The model is specially useful in 3D soil-structure interaction and requires less parameters than the equivalent linear models commonly used in geotechnical earthquake engineering.
OUniversitat Politkcnica de Catalunya (España). ISSN: 0213-1315 Recibido: Diciembre 1997

170 F.J. Montáns Leal y R.I. Borja
Palabras clave:
Plasticidad, ingenieria sz'smica y geotécnica, comportamiento de suelos.
El comportamiento de suelos es altamente no-lineal incluso para pequeñas solicitaciones1. Esta no-linealidad ha sido tradicionalmente abordada de diferentes formas. La forma más conocida y más usada es llevar a cabo los análisis mediante métodos lineales equi- valentes que proratean de algún modo las propiedades del suelo sometido a diferentes niveles de deformación a partir de curvas experimentales2. En ingeniería sísmica, donde el suelo puede analizarse como no drenado, el programa SHAKE3>4 es el abanderado del rnktodo, extendido a tres dimensiones en programas tales como HASSI o FLUSH5a6. Otro método de analizar tales comportamientos es a través de modelos no-lineales monodimen- sionales que aceptan comportamiento cíclico. Entre este tipo de modelos están los de Martin-Davidenkov, Harding-Drnevich-Cundall-Pyke (HDCP), exponencial o hiperbólico, Ramberg-Osgood, etc., implementados en diferentes programa^^^^^^^^^. Ambos métodos por experiencia proporcionan habitualmente soluciones ingenierilmente aceptables para gran parte de problemas4, pero carecen de la posibilidad de análisis no-lineal multiaxial acoplado donde las propiedades del suelo dependen de la deformación en cada instante y de su his- toria reciente. Este tipo de análisis es importante en ingeniería sísmica y en el estudio de transmisión de vibraciones en zapatas. En particular, el primer método implica el uso durante todo el análisis de ciertas propiedades constantes prorateadas a partir de máximas deformaciones esperables a través de un proceso iterativo. Realmente las propiedades son variables en cada instante y tal prorateo implica esteblecer el porcentaje equivalente entre deformación máxima y "efectiva", además de la presunción de que tal deformación pro- porcionará valores adecuados a ser utilizados durante todo el análisis. El segundo método implica que existe total independencia de las propiedades del suelo en diferentes direcciones; esto es, que la deformación en una dirección no afecta a las otras direcciones.
Finalmente, la tercera opción es el uso de modelos de plasticidad multiaxiales, normal- mente tomados de la plasticidad de metales. Tales modelos son por ejemplo modelos de Vori Misesl>ll, modelos de superficies o modelos basados en la idea de superficie límite15pi6. Los modelos de plasticidad simples como el de Von Mises no son capaces de pre- decir el comportamiento del suelo por su simplicidad. Los modelos basados en superficies múltiples requieron gran capacidad de almacenamiento debido a la cantidad de superfi- cies a utilizar si se quiere representar adecuadamente el comportamiento, así como muchas comproba~ iones l~>~~ debido a la necesidad de seguir la posición de las diferentes superfi- cies. Además carecen del efecto Masinglg observado en los suelos. Por contra, los modelos basados en la idea de superficie límite requieren únicamente dos superficies y pueden repre- sentar adecuadamente el efecto Masing. Desafortunadamente requieren parámetros internos difíciles de obtener y/o no han sido satisfactoriamente probados en análisis sísmicos tridi- mensionales y/o requieren demasiadas variables históricas o no permiten la falta de rango e l á s t i ~ o ~ ~ > ~ ~ > ~ ~ . Las condiciones de carga sísmica triaxial y deformaciones plásticas desde el primer instante de carga son especialmente complicadas de manejar, por lo que el algoritmo ha de ser robusto.
El procedimiento aquí desarrollado está basado en la idea de proyectar los modelos monodimensionales de suelos en el espacio de tensiones desviatorias a d m i ~ i b l e ~ l 3 ~ ~ ex- tendiéndolos al espacio multiaxial de tensiones desviatorias. La idea central es el uso de una superficie de contorno que limita la parte admisible de dicho espacio y el uso de un parámetro auxiliar para proyectar en él los modelos a través de la función de endureci- miento. Así se adquiere no únicamente la ventaja de usar modelos ampliamente conocidos

Modelo de ~lasticidad multiaxial para arcillas 171
por la comunidad geotécnica, sino también la posibilidad de análisis no-lineales multiaxiales acoplados.
Borja y AmiesZ1 desarrollaron su modelo tridimensional bajo la hipótesis de una región elástica permanentemente nula o puntual15 y llevaron a cabo la formulación acorde con dicha hipótesis. En este trabajo se desarrollará un modelo con una superficie de flu- encia consistente con la proyección de función de endurecimiento. La región elástica se desvanecerá únicamente cuando ocurra una descarga para recuperar las propiedades ini- ciales. Se mostrará además que en la formulación continua, la condición de descarga impli- cada por un incremento del módulo de endurecimiento es exactamente equivalente a la que se deriva de la superficie de fluencia, pero esto no es cierto en la formulación discreta. El modelo se diferencia numéricamente del desarrollado por Borja y AmiesZ1 fundamentalmente en la regla de fluencia y en la estabilidad ante carga dinámica. Como pago por la mejora, en lugar de resolver una ecuación no- lineal escalar, se tendrá que resolver una tensorial.
Siguiendo la idea de Borja y Amies13, consideramos un dominio admisible en el hiperespa- cio de tensiones desviatorias limitado por la denominada superficie límite o frontera (boun- ding surface). Por conveniencia, dado que el modelo es de carácter desviador, se denominará a' al tensor de tensiones completo 1 al tensor identidad de cuarto orden, 1 al de segundo orden, P = 1 - i(1 8 1) al tensor de proyección en el hiperplano desviador y a = P: u' al tensor desviador de tensiones. La operación 8 es el producto diádico de tensores de segundo orden en tensores de cuarto orden y los dos puntos : denotan bien el producto escalar de dos tensores de segundo orden, o bien el producto de uno de cuarto orden y uno de segundo en otro de segundo (aplicación tensorial).
Puesto que consideraremos que el material es inicialmente isótropo (sólo la historia reciente es considerada), la superficie límite tiene que ser (al menos inicialmente) una hiperesfera en dicho espacio (un hipercilindro en el hiperespacio completo de tensiones) y centrada en el origen o estado tensional hidrostático. La proyección de dicha superficie en el plano desviador de tensiones principales (comúnmente denominado plano T) es una circunferencia inicialmente centrada en el origen desviador. Durante el proceso de carga y descarga se trabajará bajo la hipótesis de que la superficie mantiene su forma por razones obvias de sencillez. No obstante, durante el desarrollo de la formulación, se le permitirá el traslado para poder así representar endurecimientos puramente cinemáticosZ3.
Se adoptará también la hipótesis de que el material recupera las propiedades elásticas cuando se produce una descarga. En el límite de tensiones admisibles (superficie límite) el material presenta endurecimiento puramente cinemático o nulo. En el primer caso la superficie límite se traslada y el valor del endurecimiento sería el ínfimo de la función de endurecimiento. En el segundo la superficie estaría fija. La Figura 1 muestra un esquema de como sería la función de endurecimiento en el plano T. En dicha figura se representan el tensor de tensiones a. y el punto que representa el tensor de tensiones a. cuando se produjo la última descarga. Se define el tensor imagen en la superficie límite a
donde k es un parámetro tal que u reside en la superficie límite. Este parámetro permite la proyección de la función de endurecimiento en el dominio de tensiones.
Borja y Amies mostraron cómo diversos modelos de comportamiento monodimensionales tales como la función exponencial, la hiperbólica o el modelo de Davidenkov, entre otros, pueden ser expresados en función del parámetro k. Por ejemplo, escogiendo una función de
endiirecimierdo de la forma 6, = H1i,, donde o, = f i lo/ / y E, = f i j l a ~ son las tensiones

172 F.J. Montáns Leal v R.I. Boria ------
MODULO DE ENDURECIMIENTO A
VALOR DEL ENDURECIMIENTO PARA EL ESTADO TENSIONAL ACTUAL
/ / SUPERFICIE DE FLUENCIA
Figura 1. Proyección del módulo de endureciiiiic~iito en el plano T de tensiones principales
uniaxiales desviadoras en incompresibilidad, la función exponencial puede ser expresada de la forma
donde h' y m son constantes dependientes del material y que serán determinadas más adelante. Como ejemplo de una función exponencial con un ínfimo no nulo
donde H' puede ser una función cualquiera (por ejemplo ~ ' ( k ) = Hh, una función de endurecimiento constante) que representa el endurecimiento cinemático cuando las tensiones alcanzan la superficie límite.
La función de endurecimiento dentro de la superficie límite (dominio admisible) es únicamente función del parámetro k, por lo que los contornos de endurecimiento constante son a su vez contornos de k constante. La forma de dichos contornos puede ser directamente obtenida del hecho de que por definición imagen reside en la superficie límite
donde /3 es el centro de dicha superficie y R es su radio. De la definición de u ecuación (1)
Definiendo el parámetro p := 1/(1 + k) e insertándolo en la ecuación previa escalada por p"
Por lo tanto, las superficies de endurecimiento constante dentro de la superficie límite son circunferencias de radio

Modelo de elasticidad multiaxial para arcillas 173
y centro
Mientras o se "aleja" de a. (tensor de tensiones en la última descarga), el centro del contorno de k(a) constante se mueve hacia @ y el radio se incrementa hacia R. Nótese que k E (O, m), p E [O, 1); r E [O, R). El parámetro p es el radio normalizado r / R de dicho contorno (Figura 2).
TENSIONES EN LA ULTIMA DESCARGA
' ,- CONTORNOS k = CONST.
Figura 2. Geometría del modelo
Basándonos en este esquema, se puede argumentar la forma de la superficie límite de dife- rentes formas. Supóngase que la superficie límite fuese una superficie extraña que pasase por a en el dominio de tensiones admisible. Cualquiera que fuese su forma, cruzaría contornos de endurecimiento constante, a menos que coincidiese con ellos. El hecho experimental de que el endurecimiento decrece únicamente con deformaciones plásticas fuerza la elección del contorno de constante k(a) como superficie de fluencia. Si se hubiese escogido un punto como dicha superficie, se podría producir cuanta deformación plástica se deseara sin reducir el módulo de endurecimiento, simplemente evolucionado sobre los contornos de k constante. La superficie de fluencia no puede ser, por lo tanto y acorde con la experiencia, un punto. Otra forma de rezonarlo es a partir del concepto de superficie de fluencia: la fluencia es el conjunto de estados admisibles de tensiones a los que se puede evolucionar a través de carga neutra (sin plastificación ni descarga). Puesto que carga neutra implica que el endurecimiento ha de permanecer invariable, los contornos de k constante y la superficie de fluencia coinciden.
Cuando el material descarga, se pretende que éste recupere las propiedades elásticas, tal y como se obtiene experimentalmente. Entonces, el módulo de endurecimiento vuelve a ser infinito, y como éste es función monótona de k , implica de que k debe ser infinito. Esto únicamente ocurre cuando a. y a coinciden. Puesto que experimentalmente no se han observado cambios bruscos en el tensor de tensiones cuando el material descarga, sino más bien una evolución continua, forzosamente se ha de obligar a. = a en el instante en que la descarga ocurre. En dicho instante, la superficie de fluencia se convierte en un punto y tanto k como H' retoman el "valor" infinito. Posteriormente, el material evoluciona en el proceso de carga y se endurece tanto cinemática como isotrópicamente de una forma combinada implicada por el modelo y la función de endurecimiento.
Con este marco se desarrollan a continuación las formulaciones continua y discreta.

174 F.J. Montáns Leal y R.I. Borja
Formulación continua
La formulación general del modelo sigue los pasos usuales de la plasticidad clásica con retorno para pequeñas deformaciones. Las "velocidades" de deformacióri sor1 divididas en una parte elástica y una plástica
Denotando por f : = (o - a): (a - a) - r2 a la función de fluencia y por y al parárnetro de consistencia
es la regla asociativa y n = (a - a)/lla - a)II es la normal a la superficie límite en a. El parámetro de consistencia es obtenido de la condición de consistencia f = O como es
habitual
f = 2 ( a - a): (tr - iu) - 2rT = O (11)
y las derivadas "temporales" iu, T y p de sus propias definiciones
i u = + ( ~ - a o ) + b o + p ( B - b o ) (12) T = p R (13) p = -p21;: (14)
La derivada del tensor de tensiones es obtenida de la ecuación constitutiva de la parte elástica. Denominando C al tensor elástico de cuarto orden
a = C : ( E - E") (15)
El parámetro k se obtiene de su equivalente plástica de la forma siguiente
. d k dtr k = -. --. E P d o ' dEP '
donde se ha denotado al tensor de endurecimiento por H: = [dci/dE] = H n éb n, redefiniendo H: = $H' por conveniencia y utilizando el hecho de que
corrio se muestra en el apéndice y puede ser deducido fácilmente de la naturaleza del modelo. Por lo tanto, de dicha ecuación se observa como H' retiene de forma natural k , que
está a su vez relacionado con la velocidad de deformación plástica a través de la cantidad redefinida como S: = Ildkldall. Esta cantidad realiza la proyección de H' en el dominio de tensiones. La expresión del tensor d k l d a está calculada en el apéndice.

Modelo de plasticidad multiaxial para arcilla8 175 l
La única cantidad en la ecuación de consistencia que permanece desconocida es la derivada del centro de la superficie límite en el caso de que a ésta se le permita trasladarse. El movimiento de dicha superficie puede ser calculado del hecho de que cuando el tensor de tensiones resida en ella para el límite Ic -+ O (a = u en la dicha superficie), la única velocidad de deformación será aquella procedente del movimiento de la superficie límite en u, cabe decir
Se ha utilizado el hecho de que los contornos de Ic constante no se pueden cruzar, y por lo tanto = iro.
Sustituyendo todas estas ecuaciones en la de consistencia y tras algunas operaciones algebraicas, se obtiene el parámetro de consistencia
El tensor elastoplástico tangente se obtiene inmediatamente sustituyendo este valor en la ecuación constitutiva de la parte elástica.
Algoritmo numérico
Especialmente importante en el modelo son las capacidades de manejo de la ausencia de rango elástico y de cargas dinámicas aleatorias (sísmicas) multiaxiales. Lo primero puede producir errores de redondeo significativos que afectan seriamente al comportamiento y la estabilidad del algoritmo en descargas y pequeñas cargas, puesto que la superficie de fluencia puede ser puntual o pequeña. Lo segundo provoca que la tensión (trial stress) resida ocasionalmente cerca o sobre la tangente a la superficie límite. Entonces, debe asegurarse la continuidad de las deformaciones en ese límite, lo que se consigue anulando las deformaciones plásticas a medida que dicho tensor se aproxime a la tangente. En caso de no hacerse de este modo existirá una discontinuidad que puede provocar la no convergencia del problema durante la búsqueda de solución. Esto se solventa si se escoge la regla asociativa (opción adoptada en este trabajo) o cualquier otra con potencial definido de tal forma que se cumpla la condición anterior.
Para desarrollar el algoritmo numérico de búsqueda de solución para cada punto de integración en el programa de elementos finitos en el que se instale, se asumirán conocidas todas las variables en el instante de "tiempo" n y se calcularán las del instante de tiempo n + 1. Los subíndices n y n + 1 en las variables indican el instante al que se refieren. Se asumirá también conocido el tensor incremento de deformaciones desviadoras Ae entre dichos instantes. El algoritmo es el siguiente: 1) Conocidos ao, aon y pn y partiendo de la expresión para el parámetro Ic del apéndice,
calcular
donde
nl = Ilan - Bnll

176 F.J. Montáns Leal y R.I. Borja
En el caso de que u = u,,, hacer u = a0 + ER(C: AE) / ]~C: A ~ l l (ver apéndice), donde k,, = 1/e es un número grande que depende de la máquina y de la precisión escogidas.
Las dos soluciones para k, se corresponden con los dos posibles valores que surgen de la definición de k, esto es, aquellos que proporcionan las dos posibles tensiones imagen u en la superficie límite. El valor positivo es el válido.
Esta forma de calcular k, evita errores de redondeo cuando el radio de la superficie de fluencia es casi nulo. En efecto, si E': = p, -+ O, entonces n2 -+ O y k, = 1 / ~ ' - 1 Ñ 1 / ~ ' -+ oo? lo que es muy importante para la estabilidad del algoritmo. Por lo tanto, las ecuaciones deben calcularse de la forma mostrada o de una forma equivalente en el sentido de que deben proporcionar valores consistentes incluso cuando el radio de la superficie límite tienda a cero y el endurecimiento a infinito o cuando el paso de carga sea muy pequeño. 2) Comprobar si el material descarga. Definiendo o:+,: = C: DE, si a s l : n, < O, entonces
hacer uon = o, y proceder de nuevo al paso 1. Kótese que ni Ak ni la función de fluencia evaluada para la tensión de prueba a;Z;,
pueden usarse para esta tarea, ya que es posible que u:+,: n, < O y tanto Ak > O como f:+!: = (a:+, - 0,): (u,&l t" - a,) - (P,R)~ > O. Esto puede suceder ya que r, = p,R puede ser muy pequeño (Figura 3). Durante el periodo iterativo de búsqueda de solución puede ocurrir que la tensión de prueba resida fuera de la superficie de fluencia, pero (u:+, - u,) corte dicha superficie. Esto conduce a ignorar un proceso de descarga o, en el caso de que alternativamente resida dentro y fuera durante el proceso de búsqueda de equilibrio global, a la imposibilidad de llegar a una solución convergente. Por lo tanto, la condición de normalidad debe ser la utilizada, ya que aunque en la formulación continua es equivalente a las otras dos, esto no es cierto en la discreta.
1
Figura 3. Inconsistencia de Alc y f n + l tT en el análisis de la cos'dición de.descarga
3) Calcular
4) Calcular H,(k,) y H , de forma conjunta como

Modelo de plasticidad multiaxial para arcillas 177
donde, debido a que puede ocurrir que p, -+ O, se usan las siguientes expresiones consistentes
'nl(il: n ) + hknn2( i2 : a) S, =
pn
nln2( i l : i2) + k,n; (25)
2 2 H, = H,(p,) ; para función exp.: H, = hk; + H - - h'k," + - Hn
" - 3 3 (26)
El endurecimiento H, debe ser calculado también consistentemente en caso de que los errores de redondeo para p, + O fuesen importantes.
En el caso de carga monodimensional se puede demostrar que [R-n,: (ao, -P,)]p;s. = 1. 5) Calcular u:+, = C i : A&, donde se puede ,usar Cn = C (tensor elástico de cuarto orden)
o C i = CzP (tensor elastoplástico tangente), donde
La elección no afecta a la solución, únicamente a la velocidad de convergencia. 6) Iteración i sobre p;+,, donde p, < p;+, < p(a:+,), para el cálculo de las variables en el
instante n + 1. Para un valor de prueba p;+,: 6.1) Calcular el parámetro de consistencia y;+,,, a partir de la ecuación de consistencia
escogiendo el mínimo de (el otro valor se corresponde con el retorno a la parte opuesta de la superficie de fluencia)
donde
6.2) Calcular el parámetro de consistencia y;+,,, a partir de la ecuación constitutiva

178 F.J. Montáns Leal v R.I. Boria
donde tanto H como m son funciones de p. Por ejemplo, usando por simplicidad y bondad la regla del punto medio (en p) para evaluar la integral
donde
n6/n5(t6: n*) + ( l l p * - 1 ) ( t 5 : n*) d* = pn+, H*
n6(i5: i 6 ) + ( i l p * - i)n5
1 t5 = -(u* - a*)
725
y y;+,,, se obtiene de la ecuación de consistencia para los valores ( e ) * .
Calcular el error de la iteración i como
i error": = y:+,,, - y,+,,, (38)
Si Ipn+, - pL;ll l/pk+l es menor que cierta tolerancia relativa determinada por el usuario sobre p E [O, l ) , o el valor absoluto de errori es menor que cierta tolerancia absoluta determinada por el usuario sobre y,+,, salir del proceso iterativo en p:+, y actualizar los valores-solución de tensiones. En caso contrario, realizar la búsqueda de un nuevo valor para p;y1l. Cualquiera de los algoritmos de búsqueda disponibles es válido. El que se ha usado en este tabajo es el de Brent25.
El algoritmo es estable e incondicionalmente convergente. Una vez que se ha obtenido el tensor desviador un+,, se le añade la parte hidrostática
para calcular el tensor completo
donde K denota el módulo de compresión hidrostático y t r ( - ) la traza del tensor.

Modelo de plasticidad multiaxial para arcillas 179
En este trabajo se ha empleado la función exponencial con superficie límite no traslacional como módulo de endurecimiento debido a su idoneidad 21 para el tipo de suelos a analizar. Una descripción detallada del significado y la influencia de los parámetros h y m del modelo en el comportamiento del mismo ha sido realizado anteriormente en otros e ~ t u d i o s ~ ~ ~ ~ ~ . No obstante, aquí se inferirán dichos parámetros directamente de las curvas de degradación del módulo de rigidez a cortante en función de la deformación O(?,) = G(.\/,)/GmaX, comúnmente usadas en ingeniería gotécnica y requeridas por el conocido programa de análisis lineal equivalente SHAKE. El módulo inicial Gmax puede ser obtenido a partir de los perfiles de velocidades de propagación de ondas a cortante. El radio R de la superficie límite puede ser estimado a partir de ensayos de penetraciónz3 o, en ausencia de los mismos, a partir de las mismas curvas de degradación del módulo de rigidez a cortante. Este último procedimiento será el usado en este trabajo.
Conocido el valor de O para una deformación grande y,, el radio de la superficie límite tendrá que ser superior a
y por lo tanto el radio R puede ser estimado aproximadamente a partir de tal valor R. La exactitud de la estimación carece completamente de importancia si se sigue el procedimiento a continuación señalado en la determinación de los parámetros h y m. Para valores incluso dos órdenes. de magnitud mayores en R, los parámetros h y m equilibrarán la diferencia para el rango de deformaciones de interés. Además, es necesario resaltar que si se desease reproducir mejor la curva de reducción del módulo a cortante bastaría con incluir más puntos en el sistema y escoger una función tipo
donde N es el número (par) de puntos. Para calcular dichos parámetros de la función de endurecimiento, se asumirán conocidos
dos puntos significativos de la curva de reducción del módulo a cortante y se denotarán por [ysl, 01] y [ysz, 02]. Por ejemplo, dos puntos representativos pueden ser [ys1 (O = 0,8); 0, 81, [ysl (O = 0,3); 0,3]. Aunque cualquier otro punto sería en principio válido si éste es distinto de O = 1 y de O = O, los puntos cercanos a los mencionados presentarán menor sensibilidad y equilibrarán los errores para distintos valores de deformación respecto a la curva que se quiere reproducir. Para cada uno de los puntos prescritos la tensión cíclica bajo comportamiento a cortante puro monodimensional será T = 0Gma,ys y la ecuación constitutiva, tras ciertas manipulaciones, se convierte en
Por lo tanto, resolviendo el sistema de dos ecuaciones no-lineales se obtienen los valores de h y m. En este estudio se ha utilizado un algoritmo de Powel híbrido modificadoz6 para resolver el sistema. En este punto cabe decir que, puesto que al realizar experimentos se comienza desde el estado virgen de tensiones, los ciclos no variarán desde -7 hasta T, por lo que incluso tras gran cantidad de ciclos existirá un desplazamiento del centro de los mismos y una cierta asimetría respecto a dicho punto. Calculando pues los parámetros h y m a partir del estado virgen tras haber producido varios ciclos de deformación, se obtendrán valores ligeramente diferentes (aprox. 5 %), posiblemente más cercanos a la realidad experimental

180 F.J. Montáns Leal y R.I. Borja
y más alejados de hipótesis teórica. Este último procedimiento es el que se ha seguido en este estudio.
Por otro lado, una estimación diferente del radio R produciría distintos valores de rn y principalmente de h, de tal forma que la curva de reducción del módulo a cortante Oy, sigue pasando por los puntos estipulados. Si dichos puntos son representativos y la estimación de R está al menos dentro del orden de magnitud, la curva será aproximadamente la rnisrna para el rango de deformaciones de interés.
Finalmente, es importante observar que este modelo requiere mcnos parámetros que los modelos lineales equivalentes tipo SHAKE, en contraposición con la creencia general en la cornuriidad geotécnica de que los modelos de comportamie~to plástico para suelos requieren más parámetros4. En efecto, tomando por ejemplo el programa SHAKE, éste requiere no sólo la curva de degradación del módulo a cortante, sino también la de amortiguamiento en función de la deformación y un parámetro adicional determinado a partir de la magnitud del terremoto que traduce deformaciones máximas en deformaciones "efectivas" con las que calcular las propiedades equivalentes. En este nuevo procedimiento las curvas de amortiguamiento son inherentes al modelo escogido (exponencial) y no se requiere ningún conocimiento de la magnitud del acelorograma a imponer, puesto que el comportamicnto es realmente no-lineal.
EJEMPLOS
A continuación a modo de verificación del modelo y para mostrar sus características, se incluyen ejemplos bajo cargas unidireccional, bidireccional y tridireccional cuasiestáticas y bajo carga sísmica bidireccional.
Carga unidireccional
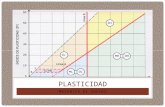
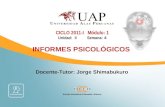
La Figura 4 muestra los límites de las curvas de reducción del módulo G para suelos arenosos obtenidas experimentalmente por Seed e Idriss2 en 1970. Ambas curvas delimitan el rango de curvas típico para dichos suelos. Se han usado estas curvas para comporbar el modelo, forzando los valores el y O2 para las deformaciones angulares (ingeriieriles) ysl = 0,01 Ojo y yS2 = O, 1 %. Una estimación R del radio R de la superficie límite se obtuvo de una deformación ys3(03) que proporciona un valor bajo de módulo a cortante (O3 = 0, l ) . La estimación usada es
Nótese que R ha de ser forzosamente mayor que f iYs303~max. Para verificar la influencia de una posible estimación pobre en las curvas O(y,) se han realizado las curvas quc sc obtendrían para valores de R = 0 , 2 ~ , R = 1 0 ~ y R = 100R. Únicamente a deformaciones muy grandes la influencia ha sido significativa y para los valores de deformación usiiales representados en la figura las diferencias eran menores del 1 %, por lo que se omiten dichas curvas. En dichas curvas también se observa como puntos [O, y,] más significativos dan una mejor reproducción de la curva. La Figura 5 muestra un ejemplo de los ciclos tensión- deformación resultantes en cortante unidimensional para la curva inferior de la Figura 4. Los parámetros para la misma son R = 200 kPa, G,,, = 40 MPa, h = 371,5 kPa y m = 1,62. El estudio detallado desarrollado por Borja y Amies" es aplicable al modelo, ya que en carga unidireccional monotónica cuasiestática ambos modelos coinciden con el modelo exponericial monodimensional que se pretende extender a tres dimensiones.

Modelo de plasticidad multiaxial para arcillas 181
REDUCCION DEL MODULO A CORTANTE G
1 o4 1 o" 1 o DEFORMACION ANGULAR UNITARIA (INGENIERIL)
Figura 4. Comparación de las curvas de reducción del módulo a cortante obtenidas por Seed e Idriss en 1970 con las obtenidas por el modelo exponencial tras haber prescrito los valores para y = 0,01 % y = 0 , l %
EJEMPLO DE CICLO DE TENSION-DEFORMACION MONODIMENSIONAL 30 T I
Figura 5. Ejemplo de ciclo tensión-deformación para ymax = f 1%
Carga multiaxial cuasiestática
En la Figura 6 se muestran tres funciones senoidales de pulsación w , 2w y 3w que han sido aplicadas a modo de deformaciones angulares unitarias en las tres direcciones ortogonales que se denominaron xy, xx e yx respectivamente. Se ha usado el rango inferior para suelos arenosos del apartado anterior y sus respectivos parámetros y se ha aplicado la carga en un total de 100 pasos.
Cuando se aplica la solicitación en una sola dirección, por ejemplo la xy, el modelo es monodireccional. Los procesos de descarga aparecen únicamente en los extremos (máximos y mínimos) de la excitación. En esos instantes el módulo de endurecimiento es infinito y comienza a evolucionar reduciéndose. El modelo se comporta en este caso como el de

182 F.J. M o n t á n s L e a l y R.I. Borja
Dafalias y Popov15. Las tensiones cortantes xy son mostradas en la Figura 7 en función del paso de carga.
-, DEFORMACIONES ANGULARES IMPUESTAS
- DIR XY - - DIR XZ 1 . DIRYZ 1
Figura 6. Deformaciones angulares unitarias impuestas en las direcciones xy, xz e yz
TENSIONES CORTANTES - SOLO APLICADA CARGA XY 30
1
-300 100 200 300 400 500 600 700 800 900 1000
PASO DE CARGA
Figura 7. Tensiones cortantes xy resultantes tras imponer únicamente las deformaciones angulares xy
Si la carga es aplicada simultáneamente en las direcciones xy y xx, el comportamiento en la dirección xy cambia como consecuencia del acoplamiento. La Figura 8 muestra la evolución de la tensión cortante correspondiente tras el acoplamiento con la dirección xz. Para este caso de carga biaxial es conveniente la representación en el plano z tanto de tensiones como de deformaciones. La Figura 9a muestra la trayectoria de las deformaciones impuestas (una curva de Lissajous) y la Figura 9b muestra la trayectoria de las tensiones resultantes, donde por comodidad visual se ha dibujado un círculo de radio Rd menor que el radio real R de la superficie límite.

Modelo de plasticidad multiaxial para arcillas 183
ESTUDIO DEL EFECTO DE ACOPlAMlENTO 80
40 -
40 - EXCITACIONES EN XY. XZ E YZ
- - - EXCITACIONES EN XY Y XZ - - EXClTAClON S6LO EN XY
-800 r,, 100 200 300 400 PASO DE 500 CARGA 600 700 800 900 , 100
Figura 8. Efecto del acoplamiento no-lineal de las diferentes direcciones en las tensiones cortantes xy
TRAYECTORIA DE TENSIONES TRAYECTORIA DE DEFORMACIONES TENSION XZ,
DEF. XZ SUPERFICIE L/M/TE
DEF. XY
Figura 9. Trayectorias de deformaciones (a) y de tensiones (b) en el plano x al aplicar las cargas en las direcciones xy y xz. Rd es el radio del círculo dibujado, R el radio de la superficie límite
Si se aplica la carga en la dirección yz se produce un acoplamiento múltiple resultando por ejemplo la evolución de tensiones en la dirección xy también mostrada en la Figura 8. En el caso de análisis tridimensional es conveniente la representación en el plano de proyección isométrica de tensiones o deformaciones principales (plano n). La Figura loa muestra las trayectorias de deformaciones en dicho plano y la 10b las de tensiones. De la comparación de ambas trayectorias también se deduce la influencia del acoplamiento plástico en la evolución de las tensiones. Si el comportamiento fuese lineal, la forma de ambas curvas coincidiría, ya que únicamente las diferenciaría el escalado por el módulo de elasticidad. En este caso la forma es distinta debido a la plastificación y al acoplamiento.
- -

184 F.J. Montáns Leal y R.1 Borja
TRAYECTORIA DE DEFORMACIONES EN EL PLANO-PI TRAYECTORIA DE TENSIONES EN EL PLANO-PI DEF PPAL 3 TENS PPAL 3
SUPERFICIE LlMlTE
R=200 Rd- 120
DEF PPAL 1 DEF PPAL 2 TENS PPAL 1 TENS PPAL 2
Figura 10. Trayectorias de deformaciones (a) y de tensiones (b) en el plano .rr al aplicar las cargas en las tres direcciones. Rd es el radio del círculo dibujado, R el radio de la superficie límite
Carga dinámica multiaxial
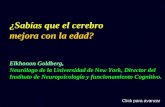
Como ejemplo de carga dinámica multiaxial se considera una carga sísmica en dos direcciones; N-S (norte-sur) y E-W (este-oeste) en forma de acelerogramas, mostrados en las Figuras 1 la y l lb . Estas excitaciones han sido recogidas en el emplazamiento LSST (Large Scale Seismic Test) en Lotung (Taiwan). En dicho emplazamiento, que es zona sísmicamente activa, el EPRI (Electric Power Research Institute) construyó dos reactores nucleares a escala e instrumentalizó la zona para poder registrar el comportamierito del suelo con y sin interacción terreno-e~tructura~~~~~~~~. El programa de ensayos allí llevado a cabo es ampliamente conocido por la comunidad geotécnica. El 20 de mayo de 1986 (LSST07) se recogieron, entre otros, los acelerogramas de dichas figuras a 11 metros de profundidad en la localización de acelerómetros denominada DHB. Las propiedades del suelo han sido analizadas por diversos grupos de investigación a través de diferentes métodos, obteniendo diferentes curvas de reducción del módulo a cortante dependientes o no de la profundidad. En este estudio, tomando como base las de AndersonZ8, se prescribieron los valores de O(y, = 0,01 %) = 0,80 y O(?, = 0 , l %) = 0,35 para el suelo hasta los 11 metros de profundidad que se toman para este ejemplo.
El algoritmo numérico para determinar las tensiones en cada punto de integración ex- puesto hasta ahora ha sido implementado en el programa de elementos finitos SPECTRAII. Dicho programa es una modificación de SPECTRA, que contiene elementos tipo "stick"", elementos tridimensionales de 8 nudos a los cuales se les han eliminado las funcjiories de forma que no son dependientes únicamente de la coordenada (vertical) del elemento. Estos ele- rnentos presentan comportamiento a cortante tipo viga-Timoshenko, pero sin la componente de flexión, y por lo tanto son capaces de predecir el comportamiento de estratos paralelos de dimensiones horizontales infinitas sometidos a excitaciones cortantes o de conipresióri propagándose según el eje los mismos.
Para modelar los 11 m de terreno de este análisis se han usado dichos elementos con longitudes de 1 m, totalizando 12 elementos. La integración usada es gaussiana de 2 puntos y puede demostrarse que no se produce bloqueo 23.

Modelo de plasticidad multiaxial para arcillas 185
LSSTO~-ACELERACI~N E-W A 1 l m
TIEMPO [S]
TIEMPO [S]
Figura 11. Acelerogramas recogidos en Lotung (Taiwan) durante el terremoto del 20 de mayo de 1986 (LSST07) a 11 metros de profundidad. Brazo FA-1, punto DHB
Los módulos de cortante iniciales G,,, para cada elemento han sido determinados a partir de perfiles de velociades de ondas S30 y se muestran en la Figura 12. El peso específico medido en la zona es aproximadamente de 19,O kN/m3.
El algoritmo de integración en el tiempo es el HHT3' con a = -0,1, e1 paso de tiempo empleado es de At = 0,02 S y el intervalo de muestre0 de los acelerogramas en campo de 0,005 s.
Tras imponer las aceleraciones registradas a 11 m de profundidad, en las Figuras 13a y 13b se comparan las predicciones en la superficie (análisis acoplado) con los registros del lugar entre 8 y 20 S (la parte más significativa). La correlación de resultados es buena tanto para bajas como para altas excitaciones. La peor predicción para los instantes de 11

LSST07 - ACELERACI~N EN SUPERFICIE - COMPONENTE E-W
2w
186 F.J. Montáns Leal y R.I. Borja
a 13 S puede ser entre otras causas debida al incremento de presión efectiva observado en Lotung durante dicho terremoto, por lo que será conveniente incluir este grado de libertad en el modelo para obtener resultados aún mejores. A modo de ejemplo, en la Figura 14a se muestran las trayectorias de deformaciones angulares unitarias a 10,71 m y en la 14b las de tensiones.
Un análisis más detallado del comportamiento del emplazamiento para los 47 m de los que se disponen acelerogramas está siendo realizado actualmente por los autores.
MODULO A CORTANTE INICIAL Gmax
, 4 -
Z
8 -
9 -
10 -
i 8 9 i o Gmax [kPa] 10'
Figura 12. Perfil de módulos a c o r t a n t e iniciales utilizado
l
Figura 13a). Continuación
- - PREDICC16N REGISTRADO EN CAMPO
I
-'a 1 O 12 14 16 18 20 TIEMPO [S]

Modelo de plasticidad multiaxial para arcillas - .-
187 - . . -
LSST07 - ACELERAC16N EN SUPERFICIE - COMPONENTE N-S
2.51 7
REGISTRADO EN CAMPO
10 12 14 16 18 20 TIEMPO [S]
Figura 13b). Comparación de la predicción obtenida con los acelerograrnas registratios en , , campo. Ampliación de la zona entre 8 y 20 segundos
TRAYECTORIA DE DEFORMACIONES DEF. XZ
TRAYECTORIA DE TENSIONES TENSION XZ
SUPERFICIE LIMITE
TENSION XY
Figura 14. Trayectorias de deformaciones angulares unitarias (a) y de tensiones cortantes (b) a 10,71 m de profundidad
En este artículo se ha desarrollado un modelo de plasticidad tridimensiorial de dos super- ficies para suelos coliesivos con ausencia de rango elástico, el cual permite la utilización de modelos monodimensionales ampliamente conocidos por la comunidad geotécnica en análisis tridimensionales con las direcciones acopladas. Además, si se usa el modelo exporiencial de t:ridurecimiento, los parárnetros del mismo pueden ser determinados automáticarnente de las tradicionales curvas de reducción del módulo a cortante en función de la deformación, y por lo tanto los datos requeridos son menores que en rnodelos lineales equivalentes.
Se ha mostrado asimismo un algoritmo (:omputacional para el modelo que evita las inestabilidades numéricas que pueden surgir por la ausencia de rango elástico y/o por la posi1)lc natilraleza aleatoria de la excitacióri. El algoritmo Iia sido ensayado tarito bajo cargas cuasiestáticas como sísmicas, mostrando efectos del acoplamiento rio-lineal eritre las tiiferentcs direcciones. Las predicciones sor1 buenas tanto cuando las deformaciones

188 F.J. Montáns Leal y R.I. Borja
son pequeñas como cuando son relativamente grandes, debido a que el comportamiento es realmente no-lineal, y por lo tanto las propiedades del material varían en función del tensor de deformaciones en cada instante. Esto no es posible en programas lineales equivalentes, por lo que las predicciones de los mismos son únicamente buenas en ciertos rangos de frecuencia.
No obstante, el modelo necesita ser verificado en análisis más complejos de interacción terreno-estructura en los que se presenten fenómenos de interferencia y refracción. Además, es un modelo de carácter desviador, por lo no es afectado por el valor de primer invariarite de tensiones. Esto implica la imposibilidad de predecir incrementos de presión efectiva y la aparición del fenómeno de licuefacción. Se está realizando actualmente la adaptación del modelo para poder predecir tales efectos.
AGRADECIMIENTOS
Este proyecto ha sido posible gracias a la financiación completa de la estancia del primer autor en la Vniversidad de Stanford por parte del Ministerio de Eduación y Cultura Español. Dicho autor agradece además la acogida recibida por el J.A. Blume Earthquake Engineering Center de dicha Universidad. El segundo autor ha tenido soporte financiero por el Earthquake Hazard Mitigation Program de National Science Foundation. Los datos digitalizados de Lotung han sido proporcionados por el Dr. H.T. Tang del EPRI.
Cálculo del parámetro k
De la definición de k y a (a-p): (a-p) = R 2
por lo que
y operando y despejando k se obtiene
Cálculo de k
Partiendo de la misma ecuación que para el cálculo de k y tomando su derivada "tem- poral"
2[0 + k(a - ao) - p]: [e + k(a - 0 0 ) + k(b - bo) -61 = 0
Despejando k , se obtiene

Modelo de plasticidad multiaxial para arcillas 189
Cálculo de dklda
De la ecuación anterior es inmediato deducir el siguiente tensor de segundo orden
Cálculo de la dirección de fluencia cuando p + O
Si p = O, entonces a = a = ao, y por lo tanto haciendo h -+ O
y por lo tanto
Demostración de la equivalencia de &(a) > O con n:b < O
Por simplicidad se hace la demostración para el caso de superficie límite fija; esto es p = 0 , p = O, u. = O. Para este caso
De la definición de n
o - a n =
110 - all
Puesto que ambos numeradores coinciden en que (1 + k)211a - al1 > O por ser números positivos y en que a: (a - oo) + kilo - ao1I2 = a: (a - ao) > O debido a la convexidad de la suerficie límite, ambas condiciones son equivalentes.

190 F.J. Montáns Leal y R.I. Boria
REFERENCIAS
1 R.I. Borja, W.H. Wu y H.A. Smith, "Nonlinear response of vertically oscilating rigid foundations", J. Geotech. Engng., Vol. 119, pp. 893-911, (1993).
2 H.B. Seed y I.M. Idriss, "Soil moduli and damping factors for dynamic response analysis", Informe EERC 70-10, Earthquake Engineering Research Center, University of California, Berkeley, (1970).
3 P.B. Schnabel, J . Lysmer y H.B. Seed, "SHAKE: A computer program for earthquake response analysis of horizontaly layered sites", Informe EERC 72-12, Earthquake Engineering Research Center, University of California, B erkeley, (1972).
4 S.L. Kramer, "Geotechnical Earthquake Engng.", Prentice- Hall, New Jersery, USA, (1996).
5 S. Gupta, J. Penzien, T.W. Lin y C.S. Yeh, "Theree dimensional hybrid modelling of oil-striicture interaction", Earthquake Engng. Struct. Dyn., Vol. 10, pp. 69-87, (1982).
6 J . Lysmer, T . Udaka, C.F. Tsai y H.B. Seed, "FLUSH-A computer program for approximate 3D analysis of soil-structure interaction problem", Informe EERC 75-30, Earthquke Engineering Research Center, University of California, Berkeley, (1975).
7 V.L. Streeter, E.B. Wylie y F.E. Richart, "Soil motion computations by characteristics methods, Proceedings ASCE National Structural Engineering Conference, San Francisco, USA, (1973).
8 P.P. Martin y H.B. Seed, "MASH-A computer program for the nonlinear analysis of vertically propagating shear waves in horizontally layered soil deposits", Informe EERC 78-23, Earthquake Engineering Research Center, University of California, Berkeley, (1978).
9 R.M. Pyke, "TESS1: A computer program for nonlinear ground response analysis", TAGA Engineering Software Services, California Cniversity, Lafayette, (1985).
10 M.K.W. Lee y W.D. Finn, "DESDRA-2: Dynamic effective response analysis of soil deposit,~ with energy transmitting boundary including assessment of liquefaction potential", Soil Mechanics Series, Vol. 38, University of British Columbia Vancouver, Canadá, (1978).
11 R.I. Borja, W.H. Wu, A.P. Amies y H.A. Smith, "Nonlinear lateral, rocking and torsional vibration of rigid foundations", J. Geotech. Engng., Vol. 120, pp. 491-513, (1994).
12 Z. Mróz, "On the description of anisotropic work-hardening, J. Mech. Phys. Solids, Vol. 15, pp. 163-175, (1967).
13 Z. Mróz, V.A. Norris y O.C. Zienkiewicz, "Application of an anisotropic hardening model in the analysis of elastoplastic deformation of soils", Geotéchnique, Vol. 29, pp. 1-34, Londres, (1979).
14 J.H. Prevost, "Mathematical modelling of monotonic and cyclic undrained clay behavior", Int. J. Num. Meth. Geomech., Vol. 2, pp. 195-216, Londres, (1977).
15 Y.F. Dafalias y E.P. Popov, "Cyclic loading for materials with a vanishing elastic region", Nuclear Engng. Des., Vol. 41, pp. 293-302, (??).
16 Y.F. Dafalias y L.R. Hermann, "Soil mechanics-transient and cyclic loads, Chapter 10: "Bound- ing surface formulation of soil plasticity, G.K. Pande y O.C. Zienkiewicz (Eds.), John Wiley, New York, USA, (1982).
17 T.J.R. Hughes, "Stress-point algorithm for a pressure-sensitive multiple yield surface plasticity theory", Informe UCJD-19339, Lawrence Livermore Laboratory, Livermore, California, (1982).
18 S. Salah-mars y E. Kavazjian Jr., "A viruta1 surface concept for nested yield surface plasticity", Jnt. J. Num. Meth. Geomech., Vol. 16, pp. 779-796, (1992).

Modelo de plasticidad multiaxial para arcillas 191
19 G. Masing, "Eigenspannungen und Verfertigung beim Messing" , Proceedings 2nd. Int. Congress on Appl. Mech., Zurich, (1926).
20 J.H. Atkinson y S.E. Stallebrass, "A model for recent stress- history and non-linearity in the stress-strain behavior of over consolidated soil", Proceedings 7 IACMAG, Ca.irns, pp. 555-560, (1991).
21 R.I. Borja y A.P. Amies, "Multiaxial cyclic plasticity model for clays", J. Geotech. Engng., Vol. 120, pp. 1051-1069, (1994).
22 R.I. Borja y W.H. Wu, "Vibration of foundations on incompressible soils with no elastic region", J. Geotech. Engng., Vol. 120, pp. 1570-1592, (1994).
23 H.Y. Chao, "Nonlinear dynamic soil-structure interaction analysis and application to Lotung problem", Tesis doctoral, Stanford Gniversity, (1996).
24 R.D. Krieg y S.W. Key, "Implementation of a time-independent plasticity theory into structural computer programs", Constitutive equations in viscoplasticity: computational and engineering aspects, J.A. Stricklin y K.J. Saczalski (Eds.), ASME, New York, USA, (1976).
25 R.P. Brent, "An algorithm with guaranteed convergence for finding a zero of a function", The Computer J., Vol. 14, pp. 422-425, (1971).
26 J. More, B. Garbow y K. Hillstorm, "User guide for MINPACK l" , Informe ANL-80-74, Argone National Labs, Argone, Illinois, USA, (1980).
27 H.T. Tang, "Large scale soil structure interaction", Informe NP-5513-SR, EPRI, Palo Alto, California, USA, (1987).
28 D.G. Anderson, "Geotechnical synthesis report for the Lotung large-scale seismic experiment", Informe TR-102362-SR, EPRI, Palo Alto, California, USA, (1993).
29 C.Y. Chang, C.M. Mok, M.S. Power y Y.K. Tang, "Analysis of ground response data at Lotung large scale soil-structura interaction experiment site", Informe NP-7306-SL, EPRI, Palo Alto, California, USA, (1991).
30 E. Berger, H. Fierz y D. Kluge, "Predictive response computations for vibration tests and earthquake of May 20, 1986 using an axisymmetric finite element formulation based on the complex response method and comparison with measurements-A Swiss contribution" , Proceedings EPRI/NRC/TPC Workshop on Seismic soil Structure Interaction Analysis Techniques Using Data from Lotung, Taiwan. EPRI NP-6154, Vol. 5, pp. 15.1-15.47, (1989).
31 H.M. Hilbert, T.J.R. Hughes y R.L. Taylor, "Improved numerical dissipation for time integration algorithms in structural dynamics", Earthquake Engng. Struct. Dyn., Vol. 5, pp. 283-292, (1977).