Nociones Básicas Cálculo Tensorial
33
Apéndice A Nociones básicas sobre Cálculo Tensorial A.1. Introducción El concepto de tensor tiene su origen en la evolución de la geometría diferencial de Gauss, Rie- mann y Christoffel. La necesidad del cálculo tensorial, conocido también como cálculo diferencial absoluto, como rama sistemática de la matemática, se debe a Ricci y a su discípulo Levi-Civita, que publicaron en colaboración el primer trabajo sobre esta materia: Métodos del cálculo diferencial ab- soluto y sus aplicaciones, en "Mathematische Annalen", vol.54 (1901). El objeto principal del cálculo tensorial es la investigación de las relaciones que permanecen invariantes cuando se cambia de un sistema de coordenadas a otro. Las leyes de la física no pueden depender del sistema de referencia que elija el físico con fines descriptivos. Por eso, es estéticamente deseable y muchas veces conveniente, utilizar el cálculo tensorial como fundamento matemático en que se puedan formular tales leyes. Einstein, en particular, lo consideró un excelente instrumento para la presentación de su teoría general de la relatividad. El cálculo tensorial alcanzó gran importancia y es hoy día indispensable en sus aplicaciones en la mayoría de las ramas de la física teórica. A.2. El convenio de sumación de Einstein Una suma cuyos sumandos se obtengan dando los valores 1, 2,..., n a ciertos subíndices de su término general, se indica comúnmente con el símbolo ∑ junto con la indicación del intervalo de variación y la forma del término general. Por ejemplo: a 1 b 1 + a 2 b 2 + ··· + a n b n = n ∑ i=1 a i b i a 1 b j c 1 + a 2 b j c 2 + ··· + a n b j c n = n ∑ i=1 a i b j c i En el cálculo tensorial aparecen con mucha frecuencia sumas del tipo de los dos ejemplos anteriores en que la suma se verifica respecto de dos subíndices repetidos de su término general. En este caso es cómodo y abrevia mucho la escritura convenir que, para tales subíndices, se suprimirá el símbolo de la suma, estableciendo así el siguiente convenio: Cuando en una expresión monomia figuren dos subíndices repetidos, se entenderá que se trata de una suma en la que los subíndices repetidos van sumados de 1 a n. 157
-
Upload
perlmanbashmet279 -
Category
Documents
-
view
278 -
download
16
Transcript of Nociones Básicas Cálculo Tensorial

Apéndice A
Nociones básicas sobre Cálculo Tensorial
A.1. Introducción
El concepto de tensor tiene su origen en la evolución de la geometría diferencial de Gauss, Rie-mann y Christoffel. La necesidad del cálculo tensorial, conocido también como cálculo diferencialabsoluto, como rama sistemática de la matemática, se debe a Ricci y a su discípulo Levi-Civita, quepublicaron en colaboración el primer trabajo sobre esta materia: Métodos del cálculo diferencial ab-soluto y sus aplicaciones, en "Mathematische Annalen", vol.54 (1901).
El objeto principal del cálculo tensorial es la investigación de las relaciones que permaneceninvariantes cuando se cambia de un sistema de coordenadas a otro. Las leyes de la física no puedendepender del sistema de referencia que elija el físico con fines descriptivos. Por eso, es estéticamentedeseable y muchas veces conveniente, utilizar el cálculo tensorial como fundamento matemático enque se puedan formular tales leyes. Einstein, en particular, lo consideró un excelente instrumento parala presentación de su teoría general de la relatividad.
El cálculo tensorial alcanzó gran importancia y es hoy día indispensable en sus aplicaciones en lamayoría de las ramas de la física teórica.
A.2. El convenio de sumación de Einstein
Una suma cuyos sumandos se obtengan dando los valores 1,2, . . . ,n a ciertos subíndices de sutérmino general, se indica comúnmente con el símbolo ∑ junto con la indicación del intervalo devariación y la forma del término general. Por ejemplo:
a1b1 + a2b2 + · · ·+ anbn =n
∑i=1
aibi
a1b jc1 + a2b jc2 + · · ·+ anb jcn =n
∑i=1
aib jci
En el cálculo tensorial aparecen con mucha frecuencia sumas del tipo de los dos ejemplos anterioresen que la suma se verifica respecto de dos subíndices repetidos de su término general. En este caso escómodo y abrevia mucho la escritura convenir que, para tales subíndices, se suprimirá el símbolo dela suma, estableciendo así el siguiente convenio:
Cuando en una expresión monomia figuren dos subíndices repetidos, se entenderá que se trata deuna suma en la que los subíndices repetidos van sumados de 1 a n.
157

158 APÉNDICE A. NOCIONES BÁSICAS SOBRE CÁLCULO TENSORIAL
La letra n hace referencia a la dimensión del espacio y su valor resulta siempre claro del tema quese está tratando. Es conveniente ser cuidadoso porque cuando no se quiera expresar la suma habrá queindicarlo explícitamente.
Usando el convenio de Einstein los ejemplos anteriores se escribirían como:n
∑i=1
aibi = aibi
n
∑i=1
aib jci = aib jci
A.3. Representación de un vector en un sistema cartesiano
En primer lugar veamos cuál es el sistema de referencia que vamos a emplear para representar alos vectores. Vamos a distinguir entre dos tipos de sistemas de referencia atendiendo a la orientaciónrelativa de sus vectores básicos:
Directo: se llama así al S.R. que tiene sus vectores básicos orientados de tal forma que el pro-ducto mixto1 de los tres resulta ser 1:
~e1 · (~e2∧~e3) = 1
Dicho de otra manera, cuando un sacacorchos girando del primer vector al segundo por elmenor ángulo avanza en la dirección y sentido del tercer vector. Este tipo de sistema también esllamado en ocasiones diestro o dextrógiro.
Inverso: Se trata del caso opuesto al anterior. Ahora tenemos:
~e1 · (~e2∧~e3) =−1
o si un sacacorchos girando del primer vector al segundo por el menor ángulo avanza en lamisma dirección pero sentido opuesto al del tercer vector. Este tipo de sistema también esconocido con el nombre de levógiro.
Consideremos un sistema de coordenadas cartesianas ortogonales (x,y,z) con el origen en el puntoinicial del vector~v. El sistema se orienta de tal forma que cumpla la condición de sistema de referenciadirecto. El vector~v queda representado por una terna ordenada de números reales
~v = (v1,v2,v3)
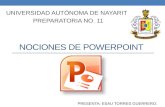
donde v1, v2 y v3 son respectivamente las proyecciones del segmento rectilíneo correspondiente a~v, sobre los ejes x,y y z, como se puede observar en la figura .
Una descripción alternativa del vector~v se obtiene introduciendo los vectores unitarios ~e1, ~e2 y ~e3,a lo largo de los ejes x,y y z. Estos vectores unitarios se conocen como los vectores unidad cartesianos.También suelen representarse por~i, ~j y~k. En función de ellos, el vector ~v queda representado por lacombinación lineal:
~v = v1~e1 + v2~e2 + v3~e3 (A.1)
donde v1, v2 y v3 se conocen como las componentes cartesianas del vector~v.1Este producto será definido más adelante en la sección A.4 (Algunos productos de vectores)

A.4. ALGUNOS PRODUCTOS DE VECTORES 159
Figura A.1: Componentes de un vector en un sistema de referencia cartesiano.
A.4. Algunos productos de vectores
En esta sección vamos a definir cuatro productos de vectores (escalar, vectorial, mixto y diádi-co). Las definiciones atenderán a dos tipos: geométrica, cuando se exprese el producto en funcióndel módulo y la dirección del vector; y analítica, cuando se exprese el producto en función de lascomponentes cartesianas del vector.
A.4.1. Producto escalar o contracción
El resultado del producto escalar de dos vectores es un escalar (número), de modo que con dichoproducto se obtiene, en general, un tensor de orden inmediatamente inferior al de los ’factores’, deahí que el producto escalar sea conocido también por el nombre de ’contracción’. El símbolo querepresenta al producto escalar es un punto centrado (·).
Definición Geométrica:~u ·~v = |~u||~v|cos θ (A.2)
donde θ es el ángulo que forman los dos vectores.
Gráficamente, ~u ·~v representa la proyección de ~u sobre~v multiplicada por la norma de~v.
Definición Analítica. En virtud de que los vectores ~e1, ~e2 y ~e3 son ortogonales, se cumplen lassiguientes relaciones:
~ei ·~e j = δi j (A.3)
donde δi j se denomina símbolo de kronecker2 y se define por:
δi j =
{1 si i = j0 si i 6= j
Si expresamos los vectores ~u y ~v en función de sus componentes cartesianas -ver la ecuación(A.1)- y tenemos en cuenta las relaciones anteriores, obtenemos que
~u ·~v = uiv j(~ei ·~e j) = uiv jδi j
2También llamada matriz unidad de dimensión 3x3 (I) o tensor unidad de orden dos.

160 APÉNDICE A. NOCIONES BÁSICAS SOBRE CÁLCULO TENSORIAL
Usando las dos últimas ecuaciones podemos expresar el producto escalar como:
~u ·~v = uivi (A.4)
Si tenemos en cuenta que los vectores también pueden escribirse como matrices columna:
~u =
u100
~e1 +
0u20
~e2 +
00u3
~e3 =
u1u2u3
(A.5)
el producto escalar de ~u y~v será:
~u ·~v = ut v = (u1 u2 u3)
v1v2v3
= uivi (A.6)
Propiedades del producto escalar
Algunas propiedades del producto escalar son:
~u ·~v =~v ·~u
(λ~u + µ~v) ·~w = λ(~u ·~w) + µ(~v ·~w) siendo λ,µ ∈ℜ
~u ·~u = u2 ≥ 0 (u2 = 0⇐⇒~u =~0)
~u ·~v = 0⇐⇒~u y~v son ortogonales (si |~u| y |~v| 6= 0).
A.4.2. Producto vectorial
El resultado del producto vectorial de dos vectores es otro vector. Dicho producto se simbolizacon un acento circunflejo centrado (∧) o, en ocasiones, también se emplea un aspa (×). El productovectorial, a diferencia del producto escalar, no es un producto de tipo interno porque para su definiciónhace uso de un elemento externo: el símbolo de Levi-Civita3. Sin este elemento no sería posible unadefinición analítica.
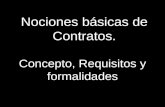
Definición Geométrica. El producto vectorial de los vectores ~u y ~v es un vector de direcciónperpendicular al plano formado por ambos, de sentido el de avance de un sacacorchos que giradel primer vector al segundo por el ángulo menor y cuyo módulo viene dado por:
|~u∧~v|= |~u||~v|sin θ, (A.7)
donde θ es el ángulo que forman los vectores ~u y~v (ver figura ).
Gráficamente, |~u∧~v| representa el área de un paralelogramo de lados u y v.
Definición Analítica. Para obtener la expresión del producto vectorial en función de las com-ponentes debemos proceder de forma análoga a como lo hicimos con el producto escalar. Dadoque los vectores ~e1, ~e2 y ~e3 son ortogonales y que forman un triedro directo, se cumplen lassiguientes relaciones:
3Se definirá más adelante.

A.4. ALGUNOS PRODUCTOS DE VECTORES 161
Figura A.2: Vector resultante de hacer el producto vectorial de los vectores ~u y~v.
~ei∧~e j = εi jk~ek (A.8)
donde la letra griega ε representa al llamado símbolo de Levi-Civita4, cuya definición es:
εi jk =
1 si ijk es una permutación par de 1,2,3.−1 si ijk es una permutación impar de 1,2,3.
0 si dos subíndices son iguales.
Teniendo en cuenta la definición geométrica de producto vectorial y las relaciones anteriores,el vector resultante de hacer el producto vectorial de ~u sobre ~v viene dado según sus componentescartesianas por la ecuación:
~u∧~v = εi jku jvk~ei (A.9)
Existe una forma simbólica de realizar el producto vectorial de dos vectores expresados en com-ponentes cartesianas. Consiste en efectuar el desarrollo de un determinante un tanto peculiar, quecomo tal no tiene sentido, pero que al ser desarrollado reproduce fielmente las operaciones propiasdel producto vectorial. Sean ~u = u1~e1 + u2~e2 + u3~e3 y~v = v1~e1 + v2~e2 + v3~e3, entonces:
~u×~v =
∣∣∣∣∣∣
~e1 ~e2 ~e3u1 u2 u3v1 v2 v3
∣∣∣∣∣∣= (u2v3−u3v2)~e1 + (u3v1−u1v3)~e2 + (u1v2−u2v1)~e3 (A.10)
con lo que se llega finalmente a la relación (A.9).
Propiedades del producto vectorial
El producto vectorial cumple las siguientes propiedades:
~u∧~u =−~v∧~u (propiedad anticonmutativa)
~u∧ (λ~v + µ~w) = λ(~u∧~v) + µ(~u∧~w)
~u∧~v = 0⇐⇒~u y~v son paralelos (si |~u| y |~v| 6= 0.)
4También llamado ’tensor unitario de orden 3 completamente antisimétrico’.

162 APÉNDICE A. NOCIONES BÁSICAS SOBRE CÁLCULO TENSORIAL
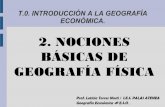
Figura A.3: Representación del paralelepípedo construido sobre los vectores ~u,~v y ~w.
A.4.3. Producto mixto
El producto mixto se define como el producto escalar de ~u por el vector que se obtiene de multi-plicar vectorialmente ~v y ~w. El resultado de hacer el producto mixto de tres vectores es un escalar. Sepuede notar de tres maneras distintas:
~u · (~v∧~w)
[~u~v~w]
(~u~v~w)
Definición geométrica. En virtud de las definiciones geométricas del producto escalar y delproducto vectorial expresadas en las ecuaciones (A.2) y (A.7) respectivamente, obtenemos que:
~u · (~v∧~w) = |~u||~v||~w|cos αsin β (A.11)
donde β es el ángulo formado por los vectores~v y ~w; y α es el ángulo que forma el vector ~u conla normal al plano formado por los vectores ~v y ~w (ver figura ).
Gráficamente ~u · (~v∧~w) representa el volumen de un paralelepípedo de lados u,v y w.
Definición analítica. Teniendo en cuenta las definiciones de producto escalar y producto vecto-rial dadas por las ecuaciones (A.4) y (A.9), podemos expresar el producto mixto como sigue:
~u · (~v∧~w) = (ui~ei) · (ε jklvkwl~e j) = ε jkluivkwl(~ei ·~e j) = ε jkluivkwlδi j =
= ε jklu jvkwl
Como todos los subíndices que aparecen en la última expresión se contraen debido a la suma(convenio de Einstein), son simples subíndices mudos, de manera que podemos cambiarles lasletras. Teniendo en cuenta esto, el producto mixto queda como:
~u · (~v∧~w) = εi jkuiv jwk. (A.12)

A.4. ALGUNOS PRODUCTOS DE VECTORES 163
De forma análoga a como lo hicimos con el producto vectorial, podemos expresar el productomixto de tres vectores ~u,~v y ~w como el desarrollo del determinante
~u · (~v∧~w) =
∣∣∣∣∣∣
u1 u2 u3v1 v2 v3w1 w2 w3
∣∣∣∣∣∣(A.13)
En virtud de esta manera de expresar el producto mixto de tres vectores como el determinanteformado por las componentes cartesianas de dichos vectores, podemos generalizar y expresar el de-terminante de una matriz genérica A en función de los elementos de matriz:
|A|=
∣∣∣∣∣∣
a11 a12 a13a21 a22 a23a31 a32 a33
∣∣∣∣∣∣= εi jka1ia2 ja3k. (A.14)
Pero esta no es más que una de las posibles formas de expresar el determinante. También se podríahaber escrito:
|A|= εi jka2ia3 ja1k = εi jka3ia1 ja2k =−εi jka1ia3 ja2k = · · · (A.15)
Una expresión general que engloba a todas las posibles combinaciones es:
|A|= εlmnεi jkaliam jank (sin sumar sobre l,m y n.) (A.16)
Si hacemos la suma sobre l,m y n nos daremos cuenta de que estamos sumando seis veces elmismo término, de manera que la ecuación general anterior se puede expresar usando el convenio deEinstein de la siguiente forma:
|A|= 16
εi jkεlmnaila jmakn. (A.17)
Propiedades del producto mixto
El producto mixto tiene las siguientes propiedades, que se deducen a partir de las del productoescalar y vectorial.
[~u~v~w] = [~v~w~u] = [~w~u~v] =−[~v~u~w] =−[~u~w~v] =−[~w~v~u]
~u · (~v∧~w) = 1⇐⇒~u,~v y ~w son ortonormales y forman un triedro directo.
~u · (~v∧~w) = 0⇐⇒~u,~v y ~w son coplanarios (si |~u|, |~v| y |~w| 6= 0).
A.4.4. Producto diádico o tensorial
Se define el producto diádico de los vectores ~u y~v por su efecto al contraerse con otro vector ~w através de las relaciones:
(~u⊗~v) ·~w =~u(~v ·~w) (A.18)
~w · (~u⊗~v) = (~w ·~u)~v (A.19)

164 APÉNDICE A. NOCIONES BÁSICAS SOBRE CÁLCULO TENSORIAL
Al contraer el producto diádico con un vector ~w resulta otro vector que tiene la dirección de ~u sise contrae por la derecha -ecuación (A.18)- y de~v si se contrae por la izquierda -ecuación (A.19)-.
(~u⊗~v) ·~w =~u(~v ·~w) (A.20)
~w · (~u⊗~v) = (~w ·~u)~v (A.21)
Teniendo en cuenta que~u y~v se pueden escribir en forma matricial, podemos expresar el productodiádico como el producto de una matriz columna por una matriz fila:
~u⊗~v = uvt =
u1u2u3
(v1 v2 v3 ) = M (A.22)
Siendo la matriz M de la forma M=
u1v1 u1v2 u1v3u2v1 u2v2 u2v3u3v1 u3v2 u3v3
que puede escribirse como
M = u1v1
1 0 00 0 00 0 0
+ · · ·+ u3v3
0 0 00 0 00 0 1
(A.23)
Esto puede expresarse como la suma de las componentes de los vectores ~u y~v
~u⊗~v = u1v1(~e1⊗~e1) + u1v2(~e1⊗~e2) + · · ·+ u3v3(~e3⊗~e3) (A.24)
A~ei⊗~e j se les denomina diadas unitarias. El concepto de diada es una generalización del conceptode vector. Las componentes de la diada pueden representarse por los nueves coeficientes de una matrizcuadrada 3×3. Una generalización de las diadas dará lugar a las poliadas, de 3N componentes.
Principales propiedades del producto diádico
Para α ∈ℜ se verifica(α~u)⊗~v =~u⊗ (α~v) = α(~u⊗~v) (A.25)
Esta relación es una consecuencia directa de la definición de producto diádico, puesto que lasdirecciones de los vectores no cambian al multiplicarlos por un número real.
El producto diádico tiene la propiedad distributiva respecto de la suma, es decir,
~u⊗ (~v +~w) =~u⊗~v +~u⊗~w (A.26)
(~u +~v)⊗~w =~u⊗~w+~v⊗~w (A.27)
El producto diádico no es conmutativo:
~u⊗~v 6=~v⊗~u (A.28)
En efecto,~u⊗~v = uiv j(~ei⊗~e j) 6= vkul(~ek⊗~el) =~v⊗~u (A.29)

A.5. TRANSFORMACIONES ORTOGONALES DE EJES CARTESIANOS 165
Figura A.4: Dos sistemas de referencia cartesianos girados uno respecto al otro pero con un origencomún.
A.5. Transformaciones ortogonales de ejes cartesianos
Una de las transformaciones lineales más sencilla y útil en la interpretación de problemas físicos esla ortogonal. Consiste en pasar de un sistema de coordenadas cartesianas a otro sin que haya distorsióno cambio de escala.
Supongamos dos sistemas de referencia cartesianos, como se muestra en la figura donde uno deellos está girado respecto del otro, compartiendo ambos el mismo origen.
El sistema 1 (sin prima) es el formado por {O,~e1,~e2,~e3}, en el que un vector cualquiera se expresacomo combinación lineal de los vectores de esta base como:
~v = vi~ei (A.30)
mientras que el sistema 2 (con prima) es el formado por {O,~e1′,~e2′,~e3′}, en el que un vector cualquiera
se expresa como combinación lineal de estos vectores como:
~v′ = v′j~e j′ (A.31)
Para poder determinar las coordenadas del sistema 1 a partir de las coordenadas del sistema 2,necesitamos conocer las componentes de los vectores básicos de un sistema en función de la base delotro. Por ejemplo, el vector ~ei
′ de la base 2 (con prima) referido a la base 1 (sin prima) se expresacomo:
~ei′ = λi j~e j (A.32)
donde λi j son los cosenos directores. Usando la ecuación (A.30) podemos expresar un vector genérico~v como:
~v = vi~ei
pero haciendo uso de la ecuación (A.31) podemos expresar el mismo vector haciendo referenciaa otra base:
~v = v′j~e j′

166 APÉNDICE A. NOCIONES BÁSICAS SOBRE CÁLCULO TENSORIAL
y como se trata del mismo vector,~v, podemos igualar las dos expresiones anteriores:
vi~ei = v′j~e j′ (A.33)
Si ahora hacemos uso de la ecuación (A.32) podemos escribir
vi~ei = v′jλ jk~ek
Multiplicando escalarmente por~ei a ambos lados, se obtiene
vi = v′jλ ji (A.34)
que nos da la relación de las coordenadas de un vector genérico en un sistema con las correspondientesa otro sistema girado respecto a éste.
La transformación inversa se otiene multiplicando escalarmente por ~e j′ la expresión A.33, siendo
el resultadov′j = λ jivi (A.35)
Como ambas bases son ortonormales, se cumple que:
~ei ·~e j = δi j (A.36)
~ei′ ·~e j
′ = δi j (A.37)
Sustituyendo la ecuación (A.32) en la ecuación (A.37) obtenemos
δi j =~ei′ ·~e j
′ = (λik~ek) · (λ jl~el) = λikλ jl~ek ·~el = λikλ jlδkl = λikλ jk
de donde deducimos queλikλ jk = δi j (A.38)
Esas seis ecuaciones ponen de manifiesto que de los nueve cosenos directores (λ) i j , sólo tres sonindependientes. Esta ecuación puede expresarse también como
λik(λk j)t = δi j (A.39)
que nos recuerda a la expresión en componentes del producto de dos matrices. El resultado, segúncorresponde, será una matriz de orden 3× 3. La delta de Kronecker δi j puede entenderse como laexpresión en componentes de la matriz unidad de orden 3×3, en la que los elementos de la diagonal(i = j) valen 1 y el resto (i 6= j) vale 0. Por tanto, la ecuación (A.39) se escribe en forma matricialcomo:
ΛΛt = I (A.40)
Observando esta última ecuación bajo la perspectiva de las propiedades matriciales, se hace evidenteque la matriz Λt es la inversa de Λ, por tanto se cumple que:
Λt ≡ Λ−1 (A.41)
En componentesΛ−1
i j = Λ ji (A.42)
En definitiva, podemos concluir que la matriz Λ es ortogonal.

A.6. INVARIANTES 167
Por dicha ortogonalidad , podemos escribir la transformada inversa:
~ei′ = λi j~e j (A.43)
~ei = λ−1i j ~e j
′ = λ ji~e j′ (A.44)
Según la transformación sufrida por una magnitud tras una rotación, podemos introducir las sigu-ientes definiciones: Una magnitud V cuyas componentes, tras una rotación del sistema de coorde-nadas, se transforman de la forma
v′i = λi jv j (A.45)
es un tensor de rango uno.Una magnitud T cuyas componentes, tras una rotación del sistema de coordenadas, se transforman
de la formaT′
i j = λikλ jlTkl (A.46)
es un tensor de rango dos. El tensor T puede expresarse en función de las diadas unitarias
T = Ti j~ei⊗~e j (A.47)
Por generalización, un tensor T de rango n es una magnitud que tiene 3n componentes y que bajouna transformación ortogonal sufre el siguiente cambio:
T ′i1i2...iN = λi1 j1 λi2 j2 · · ·λiN jNTj1 j2... jN (A.48)
T podemos escribirlo en función de las poliadas:
T = Ti1i2...iN~ei1⊗~ei2⊗·· ·⊗~eiN (A.49)
Las diadas y poliadas unitarias constituyen la base de los tensores de rango dos y N respectivamente.
A.6. Invariantes
La mayor parte de las condiciones de simetría espacial recaen sobre las magnitudes que aparecenen las leyes físicas, pues deben poder expresar toda la variedad de sistemas y de leyes que existen.
En esta sección nos centraremos en la invariancia frente a cambios de sistemas de referenciaortogonales de los tensores y de los productos escalar, vectorial y diádico.
Consideremos dos sistemas de referencia con el mismo origen pero girado uno respecto al otro.Vamos a realizar una transformación ortogonal para poner de manifiesto que los productos escalar,vectorial y diádico son invariantes frente a cambios de sistemas de referencia. Vamos a denotar por u iy vi a las componentes de los vectores~u y~v en un sistema de referencia, y por u
′j y v
′j a las componentes
en el otro sistema de referencia.
A.6.1. Invariancia del producto escalar
Vamos a demostrar que el producto escalar es invariante bajo cambios de coordenadas ortogonales.Sean ~u y~v dos vectores en las dos bases dadas a continuación
~u = ui~ei = u′j~e j′ (A.50)
~v = vi~ei = v′j~e j′ (A.51)

168 APÉNDICE A. NOCIONES BÁSICAS SOBRE CÁLCULO TENSORIAL
el producto escalar de ~u por~v será:
~u ·~v = u′jv′j = (λ jkuk)(λ jlvl) = λ jkλ jlukvl (A.52)
donde se han usado las relacionesu′j = λ jkuk (A.53)
v′j = λ jlvl (A.54)
dado queλ jkλ jl = δkl (A.55)
Podemos escribir la expresión (A.52) de la forma:
~u ·~v = u′jv′j = δklukvl = ukvk (A.56)
por lo que queda demostrada la independencia con respecto al sistema de referencia.
A.6.2. Invariancia del producto vectorial
El producto vectorial de los vectores ~u y~v en las distintas bases se expresa a continuación:
~u∧~v = εi jku jvk~ei (A.57)
~u∧~v = ε′i jku′jv′k~ei′ (A.58)
teniendo en cuenta las relaciones (A.57) y (A.58) junto con las expresiones
~ei′ = λim~em (A.59)
ε′i jk = λilλ jmλknεlmn (A.60)
podemos escribir
~u∧~v = ε′i jku′jv′k~ei′ = (λilλ jmλknεlmn)(λ jhuh)(λklvl)(λim~em) (A.61)
y si recordamos la definición de la delta de Kronecker la ecuación anterior quedará de la forma
~u∧~v = ε′i jku′jv′k~ei′ = δlmδmhδnlεlmnuhvl~em = εlmnumvn~el (A.62)
Queda así demostrada la invariancia del producto vectorial.La transformación de εi jk en las transformaciones ortogonales se comentará en la sección de ten-
sores isótropos.
A.6.3. Invariancia del producto diádico
El producto diádico en dos sistemas de referencia ortogonales vendrá dado por las expresiones
~u⊗~v = uiv j(~ei⊗~e j) (A.63)
~u⊗~v = u′iv′j(~ei′⊗~e j
′) (A.64)
por tanto, si partimos de la expresión (A.64) y recordando las expresiones (A.53), (A.54) y (A.56)obtenemos la expresión:
~u⊗~v = u′iv′j(~ei′⊗~e j
′) = (λikuk)(λ jlvl)(λim~em)⊗ (λ jn~en) (A.65)
si usamos ahora la relación (A.55) en la expresión anterior quedará demostrada la invariancia delproducto diádico:
~u⊗~v = u′iv′j(~ei′⊗~e j
′) = δkmδlnukvl~em⊗~en = ukvl~ek⊗~el (A.66)

A.6. INVARIANTES 169
A.6.4. Tensores isótropos
Un tensor es isótropo cuando sus componentes no varían bajo una rotación, es decir, es invariantefrente a rotaciones.
Tensores de orden cero. Los tensores isótropos de orden cero son los escalares.
Tensores de orden uno. No hay tensores isótropos de orden uno.
Tensores de orden dos. Los tensores isótropos de orden dos son de la forma Λ i j = αδi j , siendoα una constante.
La transformación de δ′i j en una rotación de ejes será:
δ′i j = λikλ jlδkl = λikλ jk = δi j (A.67)
Tensores de orden tres. Los tensores de orden tres son de la forma Λi jk = βεi jk , donde β es unaconstante.
Un ejemplo de tensor isótropo de orden tres es el símbolo de Levi-Civita, ε i jk, que como yahemos visto es usado en la definición del producto vectorial. Basándonos en la invariancia delproducto vectorial, podemos concluir afirmando que dicho símbolo tiene que ser forzosamenteinvariante.
Veamos ahora una demostración más detallada. Queremos evidenciar que la forma de ε i jk es lamisma que la de λilλ jmλknεlmn.
La expresión que relaciona al tensor de Levi-Civita en dos sistemas de referencia distintos es:
ε′i jk = λilλ jmλknεlmn (A.68)
siendo λilλ jmλknεlmn el desarrollo del determinante de la matriz Λ.
Según habíamos definido anteriormente, la matriz Λ cumple las propiedades siguientes:
detΛ =
0 si i = j.0 si i = j = k.1 para permutaciones pares de 1,2,3.−1 para permutaciones impares de 1,2,3.
Por tanto, ε′i jk será
ε′i jk =
0 si hay subíndices repetidos.1 para permutaciones pares de 1,2,3.−1 para permutaciones impares de 1,2,3.
que es precisamente la forma que tiene εi jk. Por tanto, vemos que ε′i jk tiene la misma forma queεi jk, lo que demuestra la invariancia.
Tensores de orden cuatro. Los tensores de orden cuatro son de la forma:
Λi jkl = λδi jδkl + νδikδ jl + γδilδ jk (A.69)

170 APÉNDICE A. NOCIONES BÁSICAS SOBRE CÁLCULO TENSORIAL
A.7. Producto interior de tensores (contracción)
Sean T y R dos tensores de orden dos
T = Ti j~ei⊗~e j
R = Ri j~ei⊗~e j
se define el producto interno o contracción de T y R como
T ·R = (Ti j~ei⊗~e j)(Rkl~ek⊗~el) = Ti j~ei(~e j ·~ek)⊗Rkl~el =
= Ti jRkl~ei⊗~elδk j = Ti jR jl~ei⊗~el (A.70)
Con el producto interno lo que conseguimos es disminuir el orden total en dos unidades.También podemos considerar la doble contracción de T con R
T : R = Ti jRi j (A.71)
cuyo resultado es un escalar.Si contraemos un tensor de segundo orden consigo mismo obtenemos
T : T = Tii (A.72)
que es la traza del tensor T . Esta cantidad, como ya hemos comentado es un escalar verdadero y portanto un invariante.
Veamos la actuación de un tensor de segundo orden sobre un vector:Sea~v el vector resultante de la contracción del tensor T sobre el vector ~u.
~v = T ·~u = Ti j~ei⊗~e j ·uk~ek = Ti juk(~ei⊗~e j) ·~ek =
= Ti juk~ei(~e j ·~ek) = Ti juk~eiδ jk = Ti ju j~ei = vi~ei (A.73)
La contracción también podríamos haberla hecho por la izquierda:
~v =~u ·T = ukTi j~ek(~ei⊗~e j) = ukTi j(~ek ·~ei)~e j =
= ukTi jδki~e j = uiTi j~e j = v j~e j (A.74)
A.8. Producto exterior de tensores
Sean T y R dos tensores de orden dos
T = Ti j~ei⊗~e j
R = Ri j~ei⊗~e j
Definimos S como el producto tensorial de T y R de este modo
S = T ⊗R = Ti jRkl~ei⊗~e j⊗~ek⊗~el = Si jkl~ei⊗~e j⊗~ek⊗~el (A.75)
El rango de S viene dado por la suma de los órdenes de R y T , por tanto, en este caso S es un tensorde orden cuatro.
La generalización a orden N es la siguiente:
T = Ti1i2...iN~e1⊗~e2⊗·· ·⊗~eN (A.76)
R = R j,N+1 j,N+2... j2N~eN+1⊗~eN+2⊗·· ·⊗~e2N (A.77)
S = T ⊗R = Ti1...iNR j,N+1... j2N~e1⊗·· ·⊗~eN⊗~eN+1⊗·· ·⊗~e2N (A.78)

A.9. AUTOANÁLISIS DE TENSORES DE SEGUNDO ORDEN 171
A.9. Autoanálisis de tensores de segundo orden
Sean ~u y T un vector y un tensor de segundo orden respectivamente,
T = Ti j~ei⊗~e j
~u = uk~ek (A.79)
Se denomina autoanálisis del tensor T al estudio de las soluciones de la ecuación
T ·~u = λ~u (A.80)
donde ~u se denomina autovector y λ autovalor. Es decir, es la búsqueda de direcciones del espacioen las que T actúa simplemente como un escalar. Para resolver el problema planteado es convenientereescribir la ecuación anterior pasando todos los términos al primer miembro de la ecuación:
(T −λI) ·~u = 0 (A.81)
La condición necesaria y suficiente para que este sistema homogéneo tenga solución distinta de latrivial (~u = 0) es que el determinante de sus coeficientes sea cero:
det(T −λI) = 0 (A.82)
Si desarrollamos este determinante obtenemos un polinomio cúbico denominado polinomio carac-terístico. La ecuación característica tiene la forma
I3− I2λ + I1λ2−λ3 = 0 (A.83)
De esta ecuación extraeremos tres soluciones, λ(1), λ(2) y λ(3) que podrán ser, en general, una real y lasotras dos complejas conjugadas. A partir de estos autovalores podremos calcular las direcciones prin-cipales o autovectores ~u. Esto se entenderá mejor viendo el ejemplo del final de la sección Invariantesdel tensor de segundo orden.
En el caso real y simétrico los tres autovalores serán reales y los autovectores correspondientes aautovalores distintos serán ortogonales.
Los autovectores los podemos elegir de forma que constituyan una base ortonormal, {~v(1),~v(2),~v(3)}.Si se cumple
~v(1) · (~v(2)∧~v(3)) = 1
entonces {~v(1),~v(2),~v(3)} forman una base ortonormal directa y son el sistema de ejes principales deltensor T . En el sistema de ejes principales el tensor es diagonal. Cuando nos refiramos al tensor T enel sistema de ejes principales lo denotaremos por T ∗.
Lo que hemos conseguido es una nueva base donde el tensor es diagonal. Vamos a demostrarlo:Si se tiene
T = Ti j~ei⊗~e j (A.84)
entonces la componente Ti j puede obtenerse como
Ti j =~ei ·T ·~e j =~ei · (Tkl~ek⊗~el) ·~e j = Tkl (~ei ·~ek) (~el ·~e j) = Tklδikδl j = Ti j (A.85)
Las componentes de T en la base de los ejes principales,~ei* ortonormal, son:
Ti j* =~ei* ·T ·~e j* (A.86)

172 APÉNDICE A. NOCIONES BÁSICAS SOBRE CÁLCULO TENSORIAL
Pero como~e j* es el autovector correspondiente al autovalor λ( j), entonces:
Ti j* =~ei*λ( j)~e j* = λ( j)~ei* ·~e j* = λ( j)δi j (A.87)
En virtud de los últimos resultados, podemos escribir
T* = λ( j)δi j~ei*⊗~e j* = λ(1)~e1*⊗~e1* + λ(2)~e2*⊗~e2* + λ(3)~e3*⊗~e3* (A.88)
en los ejes principales.Hemos demostrado de esta manera, que el tensor en los ejes principales lo podemos escribir como:
T ∗i j = λikλ jlTkl = λ(i)δi j (A.89)
T ∗ =
λ(1) 0 00 λ(2) 00 0 λ(3)
(A.90)
A.10. Invariantes del tensor de segundo orden
Sea T un tensor de segundo orden, T = Ti j~ei⊗~e j. En el espacio tridimensional, de todo tensor desegundo orden se deducen tres invariantes, que se conocen como invariantes canónicos:
Invariante lineal. Este invariante coincide con el determinante de T . El determinante es uninvariante, como ya hemos visto, ya que es un escalar verdadero. Por tanto el valor del determi-nante de T es el mismo en todos los sistemas de referencia.
I1 = det(T ) =16
εi jkεlmnTilTjmTkn = λ(1)λ(2)λ(3) (A.91)
Invariante cuadrático. Mediante un argumento análogo al anterior vemos que esta cantidad esun invariante.
I2 =
∣∣∣∣T11 T12T21 T22
∣∣∣∣+∣∣∣∣
T11 T13T31 T33
∣∣∣∣+∣∣∣∣
T22 T23T32 T33
∣∣∣∣=
=12
(TiiTj j−Ti jTji) =
= λ(1)λ(2) + λ(1)λ(3) + λ(2)λ(3) (A.92)
Invariante cúbico. Esta cantidad es un invariante ya que coincide con el valor de la traza de T ,que es un escalar verdadero.
I3 = tr(T ) = Tii = λ(1) + λ(2) + λ(3) (A.93)
Ejemplo: Sea el tensor Ai j, cuyas componentes son los elementos de la matriz
Ai j =
1 −4 6−4 −3 −26 −2 2
(A.94)

A.10. INVARIANTES DEL TENSOR DE SEGUNDO ORDEN 173
Queremos reducirlo a la forma diagonal por una transformación ortogonal. La ecuación característicao secular es ∣∣∣∣∣∣
1−σ −4 6−4 −3−σ −26 −2 2−σ
∣∣∣∣∣∣=−σ3 + 63σ + 162 = 0 (A.95)
cuyas raices sonσ1 =−3
σ2 = 9
σ3 =−6
Por tanto, la forma diagonal buscada es
Ai j =
−3 0 00 9 00 0 −6
(A.96)
La transformación ortogonal que nos permite pasar de una base a otra se obtiene resolviendo lossistemas:
Para σ1 =−3:4α−4β + 6γ = 0−4α−2γ = 0
6α−2β + 5γ = 0
cuya solución en función de α esγ =−2αβ =−2α
De donde se obtiene el autovector (ya normalizado):
~u1 =13
(−1 ,2 ,2)
Para σ2 = 9:−8α−4β + 6γ = 0−4α−12β−2γ = 0
6α−2β−7γ = 0
cuya solución en función de β esα =−2βγ =−2β
De donde se obtiene el autovector (ya normalizado):
~u2 =13
(2 ,−1 ,2)
Para σ3 =−6:7α−4β + 6γ = 0−4α + 3β−2γ = 0
6α−2β + 8γ = 0

174 APÉNDICE A. NOCIONES BÁSICAS SOBRE CÁLCULO TENSORIAL
cuya solución en función de γ esα =− 13
5 βγ = 11
5 β
De donde se obtiene el autovector (ya normalizado):
~u3 =1√315
(−13 ,5 ,11)
A.11. Tensores en coordenadas curvilíneas
Podemos definir los tensores de modo más general basándonos en una transformación arbitraria.Para ello consideramos dos conjuntos de variables independientes, xi y x
′i. Entre estos dos conjun-
tos de variables definimos la siguiente transformación:
x′i ≡ x
′i(x j) (A.97)
Ahora bien, para que esta transformación esté definida correctamente es necesario que sea invert-ible. Es decir, debe ser posible escribir tanto la relación (A.97) como:
xi ≡ xi(x′j) (A.98)
Para que esto ocurra es necesario y suficiente que el jacobiano de la transformación sea diferentede cero en todos los puntos.Se llama jacobiano al determinante de la matriz jacobiana. Por su parte,la matriz jacobiana no era más que la matriz que relacionaba unas variables con otras a través delas derivadas parciales. Por tanto, la condición necesaria y suficiente para que la transformación seainvertible es:
J =
∣∣∣∣∣∂x′i
∂x j
∣∣∣∣∣ 6= 0 (A.99)
De forma más explícita podemos escribir la expresión (A.99) como:
J =
∣∣∣∣∣∣∣∣∣∣∣
∂x1
∂x′1
∂x1
∂x′2· · · ∂x1
∂x′n∂x2
∂x′1
∂x2
∂x′2· · · ∂x2
∂x′n...
.... . .
...∂xn
∂x′1
∂xn
∂x′2· · · ∂xn
∂x′n
∣∣∣∣∣∣∣∣∣∣∣
6= 0
Visto esto, cabe cuestionarse la manera de expresar de forma más genérica los escalares, los vec-tores, los tensores, etc.
En primer lugar construyamos la magnitud que vamos a usar como referencia para definir unvector:
dx′i =
∂x′i
∂x jdx j (A.100)
Cualesquiera tres magnitudes que en la transformación dada por (A.97) se transforman como lacantidad dx′i se dice que forman un vector contracovariante. Pues bien, a las componentes de este tipo

A.11. TENSORES EN COORDENADAS CURVILÍNEAS 175
de vectores se les colocan superíndices. Por tanto, debemos introducir una nueva notación. Así pues,la transformación general dada por (A.100) la escribimos ahora como:
xi′ ≡ xi′(x j) (A.101)
Por consiguiente, la transformación entre los vectores contravariantes se define como:
Ai′ =∂xi′
∂x j A j (A.102)
No obstante, como es evidente, no todas las magnitudes de tres componentes se transforman de estamanera. Por ejemplo, el gradiente de un escalar presenta una transformación distinta. Veámoslo:
Suele definirse el gradiente de un escalar,A, como:
Bi =∂A∂xi (A.103)
La ley de transformación en un cambio de coordenadas será:
B′j =∂A∂x′ j
=∂A∂xi ·
∂xi
∂x′ j(A.104)
y, si cambiamos el orden, nos queda:
B′i =
∂A∂xi′ =
∂x j
∂xi′ ·∂A∂x j =
∂x j
∂xi′ B j (A.105)
Pues bien, cualquier magnitud A que se transforma según la relación (A.105) es un vector covari-ante. En este caso, para nombrar las componentes de dicho vector se emplean subíndices.
Ahora bien, podemos pensar que los vectores contravariantes y covariantes están relacionados yaque cualquier vector puede ser expresado tanto en componentes contravariantes como en componentescovariantes. El tensor que relaciona ambos "tipos"de componentes es el llamado tensor métrico.
El tensor métrico no es más que el conjunto de funciones que definen la métrica del espacio, esdecir, la distancia entre dos puntos del espacio. En el caso del espacio tridimensional se tendrán seisfunciones independientes.Podemos hacernos las preguntas ¿Cómo definimos la métrica de un espaciocualquiera? ¿Cómo medimos distancias en cualquier sistema de referencia? Si tenemos dos puntosinfinitamente próximos, la distancia entre ellos viene dada por la ecuación:
ds2 = gi jdxidx j (A.106)
Y esta expresión recibe el nombre de primera forma fundamental, donde:
gi j = gi j(xk) (A.107)
es el tensor métrico, el cual es simétrico.
Ejemplo: Veamos el tensor métrico en el caso de las coordenadas cartesianas en el plano.
ds2 = dx2 + dy2
donde:g11 = 1

176 APÉNDICE A. NOCIONES BÁSICAS SOBRE CÁLCULO TENSORIAL
g22 = 1
g12 = 0
y este tipo de métrica se puede resumir en:
gi j = δi j (A.108)
Todas las métricas cuyo tensor métrico se hace cero cuando los subíndices son distintos entre síreciben el nombre de métricas ortogonales.
Ejemplo: Veamos las coordenadas polares en el plano.
ds2 = dr2 + r2dθ2 (A.109)
dondegrr = 1
gθθ = r2
grθ = 0
La distancia entre dos puntos no viene dada por el teorema de Pitágoras.
Volvamos al concepto de tensor métrico. Siempre debemos tener presente que el tensor métriconos informa de cómo se mide en el espacio en el que se trabaje. Por otra parte recordemos que hemosintroducido el tensor métrico para encontrar la relación existente entre los vectores covariantes ycontravariantes. Veamos, pues, tal relación:
Ai = gi jA j (A.110)
Observando la expresión anterior se ve que cuando se contrae un tensor contravariante con un tensormétrico, se obtiene un tensor covariante. Nótese que el tensor métrico tiene subíndices en lugar desuperíndices. Esto es debido a que es covariante. Volvamos a la primera forma fundamental. Según loque acabamos de ver:
ds2 = gi jdxidx j = dxi(gi jdx j) = dxidxi (A.111)
Según esta última ecuación, la distancia entre dos puntos no varía; es decir, es un escalar verdadero.En general tenemos que:
Si contraemos un vector covariante con un vector contracovariante, obtenemos un escalar ver-dadero.
Si contraemos un vector covariante con otro vector covariante, no se obtiene un escalar.
Si contraemos un vector contracovariante con otro vector contracovariante, no se tiene un es-calar.

A.11. TENSORES EN COORDENADAS CURVILÍNEAS 177
Ahora bien, según todo lo que hemos visto hasta ahora, la operación inversa de (A.110) resulta ser:
A j = g jiAi (A.112)
Es evidente que gi j son las componentes contravariantes del tensor métrico (de ahí que se usen su-períndices en lugar de subíndices).Por definición:
gi j = (gi j)−1 (A.113)
Consecuentemente:gi jg jk = δk
i (A.114)
Como vemos, la expresión anterior no es más que una nueva definición de la delta de Krönecker.¿Qué ocurre si estamos en coordenadas cartesianas? Como las "g"son la "δ", las componentes covari-antes coinciden con las componentes contravariantes (es decir, son las mismas). Esto es lo que haceque empleemos siempre subíndices para nombrar a las componentes de los vectores sin preocuparnosde si son contravariantes o covariantes.
Llegados a este punto debemos preguntarnos por las transformaciones entre tensores. ¿Cómodefinimos un tensor de segundo orden dos veces covariante? ¿Cómo lo definimos si es dos vecescontravariante? ¿Cómo lo definimos si es mixto: una vez contravariante y otra covariante? De acuerdoa la transformación de coordenadas que hemos visto, se definen como sigue:
Si es dos veces contravariante:
T′i j =
∂x′i
∂xk∂x′i
∂xl T kl (A.115)
Si es dos veces covariante:
T′
i j =∂xk
∂x′i∂xi
∂x′ jTkl (A.116)
Si es mixto: covariante y contravariante:
T′ j
i =∂xk
∂x′i
∂x′ j
∂xl T lk (A.117)
Ahora bien, ¿cómo pasamos de contravariante a covariante, es decir, cómo se suben y se bajaníndices? Con el tensor métrico. Por tanto:
Ti j = gikg jlT kl (A.118)
T li = gikT kl (A.119)
Esto contiene el caso de las transformaciones de las coordenadas ortogonales:
x′i = λi jx j (A.120)
y de aquí se saca que:
λi j =∂x′i
∂x j(A.121)
y dex j = λi jx
′i (A.122)

178 APÉNDICE A. NOCIONES BÁSICAS SOBRE CÁLCULO TENSORIAL
λi j =∂x j
∂x′i(A.123)
entonces
λi j =∂x′i∂x j
=∂x j
∂x′i(A.124)
y, por tantoT′
i j = λikλ jlTkl = T′i j (A.125)
de aquí que no haya que hacer diferenciación entre componentes covariantes y contravariantes en unsistema cartesiano: ¡Se transforman de la misma manera! Así pues, de aquí se deduce también el queno se usen unas veces superíndices y otras subíndices. No obstante, hay materias de la física en laque esto no se puede obviar. Es el caso de la relatividad, en la que sí es importante diferenciar entrevectores covariantes y contravariantes, siempre que las coordenadas sean curvilíneas.
A.12. Diferenciación de tensores cartesianos
Supongamos ahora que tenemos un campo tensorial representado por un tensor de segundo ordensiendo las componentes del tensor funciones de las coordenadas. Así pues, nuestro tensor resulta ser:Ai j(xk). Pues bien, vamos a construir la siguiente magnitud:
∂Ai j
∂xk(A.126)
Vamos a ver la actuación del operador nabla, ~∇, en coordenadas cartesianas sobre un tensor de se-gundo orden. La actuación de nabla sobre un tensor sin contraer se denomina gradiente. La actuaciónde nabla sobre un tensor contrayendo se denomina divergencia.
Para referirnos al gradiente en varias dimensiones se usa el operador nabla: ~∇. Por su parte, elgradiente se puede representar también por ~∇⊗ o por ~∇. El que detrás de nabla no aparezca nada oaparezca el símbolo ⊗ significa que "no se contrae".
Veamos cómo se transforma la siguiente ecuación en un cambio de coordenadas ortogonales:
Bi jk =∂Ai j
∂xk(A.127)
Podemos escribir
B′i jk =∂A
′i j
∂x′k=
∂(λilλ jmAlm)
∂xn
∂xn
∂x′k= λilλ jmλkn
∂Alm
∂xn=
λilλ jmλknBlmn (A.128)
y esto no es más que el gradiente.Si observamos la expresión anterior, vemos que el gradiente ha hecho que el tensor nos aumente
en un grado; es decir, teníamos un tensor de segundo orden y al hacer el gradiente hemos obtenido untensor de tercer orden. Así pues, en general, al hacer el gradiente de un tensor de orden N se obtieneun tensor de orden N + 1.
El resultado anterior no es correcto en el caso de tensores no cartesianos.

A.12. DIFERENCIACIÓN DE TENSORES CARTESIANOS 179
Antes de continuar, consideremos la siguiente notación:
∂Ai j
∂xk= Ai j,k (A.129)
como vemos, cuando tengamos uno o más subíndices separados del resto de subíndices por una coma,tendremos que derivar la expresión respecto a la componente que tenga esos subíndices. En definitiva,una coma dentro de un subíndice implica una derivada.
Volvamos al operador nabla. El operador nabla5 se define como:
~∇ =∂
∂xi(A.130)
¿Cuáles son las operaciones que se pueden realizar con este operador sobre cualquier magnitud?Estas operaciones dependen del tipo de magnitud sobre la que actúen. Así pues, tenemos:
El operador nabla actuando sobre un escalar.
En este caso el operador no puede actuar más que de una manera: como gradiente. Por tanto, sitenemos un escalar A, su gradiente vendrá dado por ~∇A. Dicho gradiente es un vector:
~∇A =∂A∂xi
(A.131)
El operador nabla actuando sobre un vector.
En este caso el operador nabla puede actuar sin contraer o contrayendo.
Por tanto, si tenemos un vector ~B = Bi , nos podemos encontrar con:
Gradiente de ~B≡~∇~B =∂Bi
∂x j(A.132)
donde vemos que no se contrae sobre ningún índice puesto que no hay índices repetidos. Consecuente-mente, el gradiente de un vector es un tensor de segundo orden.
Divergencia de ~B≡~∇ ·~B =∂Bi
∂xi(A.133)
La divergencia de un vector es un escalar.
Rotacional de ~B≡~∇∧~B = εi jk∂Bk
∂x j(A.134)
donde vemos que para obtener un vector hemos tenido que introducir un tensor de tercer orden.
Ejemplo: Demostración en coordenadas cartesianas de que se verifica la siguiente identidad:
~∇∧ ( f~A) = (~∇ f )∧~A+ f (~∇∧~A) (A.135)
5Este operador siempre en un vector, se le ponga o no la "flechita"encima.

180 APÉNDICE A. NOCIONES BÁSICAS SOBRE CÁLCULO TENSORIAL
Escribamos el rotacional de f~A en componentes teniendo en cuenta que ~B =~∇∧ ( f~A), por tanto:
Bi = εi jk( f Ak), j = εi jk( f Ak, j + f , j Ak) = f εi jkAk, j +εi jk f , j Ak (A.136)
Esta ecuación la podemos expresar vectorialmente:
~B = ~∇∧ ( f~A) = f (~∇∧~A) + (~∇ f )∧~A (A.137)
Si comparamos (A.137) con (A.135) vemos que son idénticas salvo en el orden de los sumandos delsegundo miembro. Como el orden de la suma (en este caso) no afecta al resultado, queda demostradala identidad (A.135) que es lo que se nos pedía.
Ejemplo: Prueba en coordenadas cartesianas de que es cierta la siguiente identidad:
(~A ·~∇) f = ~A ·~∇ f (A.138)
Expresemos el primer miembro de la igualdad en componentes:
(~A ·~∇) f =
(Ai ∂
∂xi
)f = Ai
∂ f∂xi
= ~A ·~∇ f (A.139)
Ejemplo: Demostración en coordenadas cartesianas de que es cierta la siguiente identidad:
~∇∧ (~A∧~B) = ~A(~∇ ·~B)−~B(~∇ ·~A) + (~B ·~∇)~A− (~A ·~∇)~B (A.140)
Al igual que en los casos anteriores vamos a trabajar con componentes pero antes multiplicamosel rotacional del producto vectorial de los vectores ~A y ~B por~εp:
~εp · [~∇∧ (~A∧~B)] = εpqk[εk jiA jBi],q = εpqkεk jiA jBi,q +εpqkεk jiA j,q Bi (A.141)
Por otra parte, recordando la definición de la delta de Krönecker, podemos escribir:
~εp · [~∇∧ (~A∧~B)] = (δp jδqi−δpiδq j)A jBi,q +(δp jδqi−δpiδq j)A j,q Bi
= ApBi,i−AqBp,q +Ap,q Bq−Aq,q Bp (A.142)
Y reescribiendo la expresión anterior en forma vectorial tenemos:
~∇∧ (~A∧~B) = ~A(~∇ ·~B)− (~∇ ·~A)~B + (~B ·~∇)~A−~B(~A ·~∇) (A.143)
Observando la ecuación anterior vemos que es igual a la ecuación (A.140) salvo en el orden de lostérminos. Dicho orden, en este caso, no afecta el resultado. Así pues, queda demostrada la expresión(A.140).
Ejemplo: Prueba en coordenadas cartesianas de la veracidad de la expresión:
~∇∧ (~∇∧~A) = ~∇(~∇ ·~A)− ~∇2~A (A.144)

A.13. TEOREMA DE HAMILTON-CAYLEY 181
Vamos a seguir los mismos pasos que en el ejemplo anterior:
~εp · (~∇∧~A) = εi jkAk, j (A.145)
por lo tanto:
~εp · [~∇∧ (~∇∧~A)] = εpqr[εr jkA j, j ],q = εpqrεr jkAk,pk−Ap,qq
= (δp jδqk−δpkδq j)Ak, jq =
= Ak,pk−Ap,qq (A.146)
y escribiendo la ecuación (A.146) en forma vectorial queda:
~∇∧ (~∇∧~A) = ~∇(~∇ ·~A)−~∇2~A (A.147)
que es la expresión que queríamos demostrar.
A.13. Teorema de Hamilton-Cayley
Toda matriz cuadrada satisface su ecuación característica. Su demostración es complicada ytediosa, por tanto no la vamos a hacer. Sin embargo, vamos a ver qué significa. Para ello vamos a verun caso particular.
Supongamos que tenemos una matriz cuadrada cualquiera de orden N. Llamemos a dicha matrizA. Su polinomio característico es de orden N y viene dado por:
det(A− xI)≡ |A− xI| (A.148)
Por tanto, su ecuación característica es:
f (x) ≡ |A− xI|= 0 (A.149)
donde A es la matriz cuadrada dada, I es la matriz identidad y x es un número que permite que sesatisfaga la ecuación.
El teorema de Hamilton-Cayley dice que si sustituimos el número x por la matriz cuadrada A, sesigue satisfaciendo la ecuación característica, esto es:
f (A) = 0N (A.150)
donde 0N representa a la matriz cuadrada nula de orden N. Expresado en forma matricial:
I3I− I2A + I1A2−A3 =
0 0 00 0 00 0 0
(A.151)
Ejemplo: Supongamos que tenemos la siguiente matriz cuadrada 2×2:
A =
(1 34 5
)(A.152)

182 APÉNDICE A. NOCIONES BÁSICAS SOBRE CÁLCULO TENSORIAL
En primer lugar, calculemos su ecuación característica:
|A− xI|=∣∣∣∣
1− x 34 5− x
∣∣∣∣= (1− x)(5− x)−12 = 0 (A.153)
La ecuación característica será por tanto:
x2−6x−7 = 0 (A.154)
Es evidente que hay varios valores de x que satisfacen esta ecuación. Dichos valores se obtienen sinmás que resolver la ecuación. Ahora bien, el teorema de Hamilton-Cayley dice que la matriz cuadradaA satisface dicha ecuación, es decir, que se cumple:
(1 34 5
)2
−6(
1 34 5
)−7(
1 00 1
)=
(0 00 0
)(A.155)
Veamos si es cierto:(
1 34 5
)2
−6(
1 34 5
)−7(
1 00 1
)=
=
(13 1824 37
)−(
6 1824 30
)−(
7 00 7
)= 0 (A.156)
Así hemos comprobado el teorema para nuestro caso particular.
A.13.1. Corolario del teorema de Hamilton-Cayley
Cualquier potencia de una matriz cuadrada A (m×m) se puede expresar como una combinaciónlineal de las matrices I, A, . . . , Am−1 siendo An la potencia n-ésima de A, donde los coeficientes de lacombinación son función de los invariantes de A.
Para aclarar ideas, veamos un caso particular:Supongamos que A es una matriz 3×3 y que buscamos A3.Como A satisface la ecuación característica, ecuación (A.151), podemos de ella despejar A3 como
A3 = I3I− I2A + I1A2 (A.157)
Efectivamente, hemos podido expresar la potencia A3 en función de I, A y A2. Pero, ¿qué ocurre sinos piden A4? ¿Podremos expresarla en función de I, A y A2 o necesitaremos también expresarla enfunción de A3? Según el corolario no será necesario A3, ya que
A4 = I3A− I2A2 + I1A3 = I3A− I2A2 + I1(I3I− I2A + I1A2)=
(I1I3) I + (I3− I1I2)A +(I21 − I2
)A2 (A.158)
Como podemos ver, efectivamente la máxima potencia es m− 1; en nuestro caso 3− 1 = 2. De estecaso particular podemos deducir la expresión general:
An = bmI + bm−1A + bm−2A2 + · · ·+ b1Am−1 (A.159)
donde los bi son funciones de los invariantes de A.

A.14. DESCOMPOSICIÓN ADITIVA DE TENSORES DE ORDEN 2 183
A.13.2. Función de una matriz
Para definir la función de una matriz es necesario conocer el desarrollo en serie de potenciasde Taylor de esa función para una variable "habitual". En dicho desarrollo se sustituye la variable"habitual"por la matriz. Para verlo más claro, hagamos un ejemplo concreto:
Supongamos que tenemos el seno de una matriz A cualquiera de dimensión m×m, es decir:
f (A) = sin (A) (A.160)
La pregunta que se nos viene a la cabeza es ¿qué significado tiene esta expresión? Pues bien, lo quetenemos que hacer es remitirnos al desarrollo en serie de potencias de Taylor del seno. Es decir:
sinx = x− x3
3!+
x5
5!− x7
7!+ · · · (A.161)
Una vez conocido el desarrollo oportuno, para definir el seno de la matriz basta con sustituir en eldesarrollo de Taylor la x por la matriz correspondiente:
sin A = A− A3
3!+
A5
5!− A7
7!+ · · · (A.162)
Una propiedad interesante es que, a pesar de que el desarrollo en serie de potencias de Taylor delseno de x tiene infinitos términos, el desarrollo del seno de la matriz A no tiene infinitos términospuesto que, en virtud del corolario del teorema de Hamilton-Cayley, podemos expresar cualquierpotencia de A como combinación lineal de matrices, siendo Am−1 la matriz de mayor potencia si lamatriz A es de dimensión m×m. Para el caso m = 3, se tiene:
sinA = c3I + c2A + c1A2 (A.163)
Los coeficientes que acompañan a las potencias de la matriz en la combinación lineal, aunque sonun número finito, pueden estar formados por una suma infinita de términos; es decir c1, c2 y c3 (ennuestro caso) pueden ser una suma de infinitos términos, funciones de los invariantes de A.
A.14. Descomposición aditiva de tensores de orden 2
En esta sección vamos a estudiar dos formas distintas de descomponer un tensor de segundo ordenen dos sumandos con unas características determinadas. Por un lado lo descompondremos de maneratal que uno de los sumandos tenga como peculiaridad su isotropía.
Mediante la segunda forma de descomposición obtendremos un sumando perfectamente simétricoy otro antisimétrico.
A.14.1. Partes esférica y desviador
Se denomina tensor esférico a un tensor isótropo, que puede descomponerse en dos partes,A =AE + AD, donde la parte esférica hace referencia a la componente isótropa, es decir:
AE =13
Tr(A) I (A.164)
y la parte desviatoria o desviador se corresponde con la parte restante:
AD = A− 13
Tr(A) I (A.165)

184 APÉNDICE A. NOCIONES BÁSICAS SOBRE CÁLCULO TENSORIAL
AE tiene una componente independiente, mientras que AD tiene, por tanto, ocho componentesindependientes. La relación que cumplen las componentes del desviador es que su traza es nula, esdecir:
Tr(AD) = 0 (A.166)
Esta propiedad se demuestra de forma trivial a partir de las propias definiciones:
Tr(AD) = Tr(A)− 13
Tr(A)Tr(I) = Tr(A)−Tr(A) = 0
A.14.2. Partes simétrica y antisimétrica
Como vamos a mostrar a continuación, cualquier tensor se puede descomponer en uno que seasimétrico y otro que sea antisimétrico:
A = AS + AA (A.167)
donde AS se refiere a la parte simétrica,
AS =12
(A + At) (A.168)
que tiene seis componentes independientes, y AA se refiere a la parte antisimétrica,
AS =12
(A−At) (A.169)
que tiene tres componentes independientes.Sea A un tensor, que expresado en sus componentes simétrica y antisimétrica tendrá la forma:
A =12
A +12
A +12
At− 12
At =12
(A + At) +12
(A−At)
donde el primero y el segundo sumando del último término se corresponden, respectivamente, con untensor simétrico y uno antisimétrico.

A.15. EJERCICIOS PROPUESTOS 185
A.15. Ejercicios propuestos
Ejercicio 1. Exprese en notación de índices las siguientes cantidades:
~A · (~B∧~C)
~A∧ (~B∧~C)
~B(~A ·~C)
~B(~A ·~C)−~C(~A ·~B)
y verifique que ~A∧ (~B∧~C) = ~B(~A ·~C)−~C(~A ·~B)
Ejercicio 2. Escriba cada una de las expresiones siguientes teniendo en cuenta el convenio de sumaciónde los índices repetidos:
dφ = ∂φ∂x1 dx1 + ∂φ
∂x2 dx2 + · · ·+ ∂φ∂xN dxN .
(x1)2
+(x2)2
+(x3)2
+ · · ·+(xN)2.
ds2 = g11(dx1)2 + g22(dx2)2 + g33(dx3)2.
∑3p=1 ∑3
q=1 gpqdxpdxq.
Ejercicio 3. Escriba todos los términos de cada una de las siguientes sumas indicadas:
a jkxk
ApqAqr
grs
Ejercicio 4. Halle el ángulo formado por los vectores ~A = (2,2,−1) y ~B = (6,−3,2).
Ejercicio 5. Halle los ángulos que forma el vector ~A = (3,−6,2) con los ejes coordenados.
Ejercicio 6. Halle la proyección del vector ~A = (1,−2,1) según la dirección de ~B = (4,−4,7).
Ejercicio 7. Halle la ecuación del plano perpendicular al vector ~A = (2,3,6) y que pasa por el extremodel vector ~B = (1,5,3).
Ejercicio 8. Demuestre que|~A∧~B|2 + |~A ·~B|2 = |~A|2|~B|2

186 APÉNDICE A. NOCIONES BÁSICAS SOBRE CÁLCULO TENSORIAL
Ejercicio 9. Si ~A = (3,−1,2), ~B = (2,1,−1) y ~C = (1,−2,2), halle
(~A∧~B)∧~C.
Ejercicio 10. Determine el vector unitario perpendicular al plano formado por ~A = (2,−6,−3) y~B = (4,3,−1).
Ejercicio 11. Siendo ~A = a1~i + a2~j + a3~k y ~B = b1~i + b2~j + b3~k, demuestre que
~A∧~B =
∣∣∣∣∣∣
~i ~j ~ka1 a2 a3b1 b2 b3
∣∣∣∣∣∣
Ejercicio 12. Demuestre que el valor absoluto de
~A · (~B∧~C)
es igual al volumen de un paralelepípedo de aristas ~A, ~B y ~C.
Ejercicio 13. Calcule (2~i−3~j) · [(~i +~j−~k)∧ (3~i−~k)].
Ejercicio 14. Halle la ecuación del plano formado por los puntos P1(2,−1,1), P2(3,2,−1) y P3(−1,3,2).
Ejercicio 15. Siendo φ(x,y,z) = 3x2y− y3z, halle ~∇φ (gradiente) en el punto (1,−2,−1).
Ejercicio 16. Siendo ~A = x2z~i−2y3z2~j + xy2z~k, halle ~∇ ·A (divergencia) en el punto (1,−1,1).
Ejercicio 17. Siendo ~A = xz3~i−2x2yz~j + 2yz4~k halle ~∇∧A (rotacional) en el punto (1,−1,1).
Ejercicio 18. Demuestre que el producto exterior de dos vectores contravariantes A i y Bi, resulta untensor de segundo orden contravariante.
Ejercicio 19. Sean Ai j y Ai j las componentes de un tensor de segundo orden. Pruebe que λ = Ai jAi j
es un escalar.
Ejercicio 20. Sea Ai jk un tensor de tercer orden.
Demuestre que la contracción Ai ji es un tensor de primer orden contravariante.

A.15. EJERCICIOS PROPUESTOS 187
Demuestre que la contracción de los índices i y j produce Aiik , el cual no es un tensor. Esto
muestra que, en general, el proceso de contracción se aplica a índices de distinto nivel.
Ejercicio 21. Encuentre los autovalores y autovectores asociados a la matriz A:
A =
1 1 21 2 12 1 1
Muestre que los autovectores son ortogonales.
Ejercicio 22. Exprese en forma tensorial:
la velocidad.
la aceleración de una partícula en movimiento.
Ejercicio 23. Exprese la ley de Newton de la mecánica en forma matricial.

188 APÉNDICE A. NOCIONES BÁSICAS SOBRE CÁLCULO TENSORIAL

Bibliografía
[1] Luis A. Santaló: Vectores y tensores con sus aplicaciones, Editorial universitaria de Buenos Aires(1970).
[2] Fred A. Hinchey: Vectores y Tensores, Editorial Limusa (1979).
[3] Murray R. Spiegel: Teoría y problemas de análisis vectorial y una introducción al análisis ten-sorial, Editorial McGraw-Hill (1974).
[4] J.H. Heinbockel: Introduction to tensor calculus and continuum mechanics.
[5] Barry Spain: Cálculo Tensorial, Editorial Dossat (1960).
[6] Manuel Zamora: Termo I, Publicaciones de la Universidad de Sevilla (1998).
189







![Contabilidad nociones básicas [Contabilidad]](https://static.fdocuments.es/doc/165x107/54979342ac795982318b48a0/contabilidad-nociones-basicas-contabilidad.jpg)