
PONTIFICIA UNIVERSIDAD CATÓLICA DE …lep.eie.pucv.cl/tesisespinoza3.pdf · ... Abril de 2011. ......
85
PONTIFICIA UNIVERSIDAD CATÓLICA DE VALPARAÍSO – CHILE ESCUELA DE INGENIERÍA ELÉCTRICA BENEFICIOS DE UN STATCOM EN UN SISTEMA DE TRANSMISIÓN NICOLÁS IGNACIO ESPINOZA RICCHIONI INFORME FINAL DEL PROYECTO PRESENTADO EN CUMPLIMIENTO DE LOS REQUISITOS PARA OPTAR AL TÍTULO PROFESIONAL DE INGENIERO CIVIL ELÉCTRICO ABRIL 2011
Transcript of PONTIFICIA UNIVERSIDAD CATÓLICA DE …lep.eie.pucv.cl/tesisespinoza3.pdf · ... Abril de 2011. ......

PONTIFICIA UNIVERSIDAD CATÓLICA DE VALPARAÍSO – CHILE
ESCUELA DE INGENIERÍA ELÉCTRICA
BENEFICIOS DE UN STATCOM EN UN SISTEMA DE TRANSMISIÓN
NICOLÁS IGNACIO ESPINOZA RICCHIONI
INFORME FINAL DEL PROYECTO
PRESENTADO EN CUMPLIMIENTO
DE LOS REQUISITOS PARA OPTAR
AL TÍTULO PROFESIONAL DE
INGENIERO CIVIL ELÉCTRICO
ABRIL 2011

BENEFICIOS DE UN STATCOM EN UN SISTEMA DE TRANSMISIÓN
INFORME FINAL
Presentado en cumplimiento de los requisitos
para optar al título profesional de
Ingeniero Civil Eléctrico
otorgado por la
Escuela de Ingeniería Eléctrica
de la
Pontificia Universidad Católica de Valparaíso
Nicolás Ignacio Espinoza Ricchioni
Abril, 2011

PONTIFICIA UNIVERSIDAD CATÓLICA DE VALPARAÍSO FACULTAD DE INGENIERÍA
ESCUELA DE INGENIERÍA ELÉCTRICA
CONSTANCIA
El Secretario Académico de la Escuela de Ingeniería Eléctrica de constancia deja
constancia que el presente informe denominado
BENEFICIOS DE UN STATCOM EN UN SISTEMA DE TRANSMISIÓN
Presentado por el señor
Nicolás Ignacio Espinoza Ricchioni
fue desarrollado y aprobado por dicho alumno para obtener el grado académico
de “Laurea Specialistica in Ingegneria Elettrica” otorgada por e Instituto
Politecnico di Torino, Italia, en virtud del convenio de doble titulación suscrito
entre dicho Instituto y la Pontificia Universidad Católica de Valparaíso.
Este informe es entregado por el citado alumno, en idioma español, en
cumplimiento de lo establecido en dicho convenio.
Raimundo Villarroel Valencia Secretario Académico
Valparaíso, Abril de 2011.

Mi sincero agradecimiento para
mi supervisor Charles K. Sao, Ph.D.
por su guía profesional, gran apoyo y
su ayuda invalorable durante el período
de investigación.
Quisiera expresar mi gratitud al
Prof. Roberto Napoli y a Dr. Domingo
R. Caballero por ser mis examinadores
durante el programa de doble titulación,
y en especial a Gabriel Olguín Ph.D.
por su apoyo durante todo el desarrollo
de este trabajo.
Mi agradecimiento a los
miembros de ABB AB Corporate
Research Center, Suecia, Electrical
Power System Group, por darme la
oportunidad de escribir mi tesis
rodeado de personas altamente
calificadas.
Finalmente agradezco a mi
familia y mis amigos por su invaluable
apoyo.

BENEFICIOS DE UN STATCOM EN UN SISTEMA DE TRANSMISIÓN
Nicolás Ignacio Espinoza Ricchioni
RESUMEN
En Chile, un país que emerge rápido, su sistema de transmisión tiene que
ser actualizado frecuentemente debido a su rápido crecimiento. Además de la
construcción de nuevas líneas de transmisión, un método efectivo
económicamente para aumentar la capacidad de transmisión es mediante la
instalación de dispositivos FACTS (Sistemas Flexibles de Transmisión en CA).
Es más, el STATCOM (Compensador de Estáticos de Reactivos) de mayor
potencia disponible en el mercado fue adquirido por la compañía de transmisión
local chilena. La tecnología FACTS proporciona soluciones para problemas de
estabilidad, mejora la eficiencia total del sistema, y aumenta la capacidad,
seguridad y flexibilidad de un sistema de transmisión.
En esta Tesis, se ha simulado un sistema de transmisión real, con un
STATCOM en dos y tres niveles. Se propone una completa estrategia de control
de voltaje para secuencia positiva y negativa, incluido los controladores de
corriente y sus funciones de switching. El desempeño del STATCOM es testeado
ante diferentes disturbios, mientras que sus variables más importantes son
analizadas.

ÍNDICE
INTRODUCCIÓN .................................................................................................. 1
CAPITULO 1 DESCRIPCIÓN GENERAL DE UN STATCOM .................................................... 3 1.1 INTRODUCCIÓN ............................................................................... 3 1.2 DESCRIPCIÓN DEL SISTEMA ......................................................... 3 1.2.1 Control de voltaje e inyección de potencia reactiva ........................... 5 1.3 OTRAS APLICACIONES DE UN STATCOM .................................... 8 1.3.1 Compensación de carga .................................................................... 8 1.3.2 Amortiguamiento de oscilaciones electromecánicas ....................... 12 1.3.3 STATCOM con dispositivos de almacenamiento de energía........... 13
CAPITULO 2 CONTROL DE UN STATCOM E INTEGRACION EN LA RED .......................... 14 2.1 INTRODUCCIÓN ............................................................................. 14 2.2 MOLDEAMIENTO DE UN STATCOM PARA CONTROL DE
CORRIENTE ................................................................................... 14 2.2.1 Modelo analítico .............................................................................. 14 2.2.2 Control de corriente desacoplado .................................................... 17 2.3 DIAGRAMA DE CONTROL ............................................................. 17 2.4 CONTROLADOR EN SECUENCIA POSITIVA ............................... 18 2.4.1 Control de voltaje en secuencia positiva.......................................... 20 2.4.2 Control del voltaje en el DC-Link ..................................................... 20 2.4.3 Control de corriente en secuencia positiva ...................................... 21 2.5 CONTROLADOR EN SECUENCIA NEGATIVA .............................. 23 2.5.1 Controlador de balance de voltaje ................................................... 23 2.5.2 Control de corriente en secuencia negativa ..................................... 24 2.6 UNIDADES DE MEDICIÓN ............................................................. 25 2.6.1 Unidad de medición de voltaje ......................................................... 25 2.6.1.1 Medición de voltaje en secuencia positiva ....................................... 26 2.6.1.2 Medición de voltaje en secuencia negativa ..................................... 27 2.6.2 Unidad de medición de corriente ..................................................... 29 2.6.2.1 Medición de corriente en secuencia positiva ................................... 29 2.6.2.2 Medición de corriente en secuencia negativa .................................. 30 2.7 GENERADOR DE SEÑALES MODULADORAS ............................. 32 2.7.1 Voltaje de referencia de salida en secuencia positiva ..................... 32 2.7.2 Voltaje de referencia de salida en secuencia negativa .................... 33 2.8 PWM Y SEÑALES DE GATE .......................................................... 35 2.8.1 Sinusoidal Pulse Width Modulation para STATCOM basado
en convertidor de dos niveles .......................................................... 35 2.8.2 Switching Frequency Optimal Pulse Width Modulation for
three-level VSI based STATCOM .................................................... 37

vi
2.8.3 Control de balance de voltaje DC para convertidor de tres niveles ............................................................................................. 39
2.9 MODELADO DEL SISTEMA DE TRANSMISIÓN ............................ 43 2.9.1 Fuentes equivalentes....................................................................... 44 2.9.2 Transformadores ............................................................................. 45 2.9.3 Líneas de transmisión y compensación serie-paralelo .................... 45 2.9.4 Cargas ............................................................................................. 47 2.10 MODELO COMPLETO .................................................................... 48
CAPITULO 3 SIMULACIÓN Y RESULTADOS ......................................................................... 49 3.1 INTRODUCCIÓN ............................................................................. 49 3.2 CONFIGURACIÓN DE CONTROLADORES PI Y FILTROS ........... 49 3.3 TEST DE CONTROLES PARA EL STATCOM EN DOS NIVELES . 51 3.3.1 Control de corriente ......................................................................... 51 3.3.2 Control del voltaje DC ...................................................................... 52 3.3.3 Control de voltaje RMS .................................................................... 52 3.4 TEST DE CONTROLES PARA EL STATCOM EN DOS NIVELES . 54 3.4.1 Control de corriente ......................................................................... 54 3.4.2 Control del voltaje DC ...................................................................... 55 3.4.3 Control de voltaje RMS .................................................................... 57 3.5 VARIACIÓN DE CARGA ................................................................. 57 3.5.1 Conexión y desconexión de carga balanceada ............................... 57 3.5.2 Conexión y desconexión de carga desbalanceada ......................... 58 3.6 FALLA BIFÁSICA A TIERRA ........................................................... 64 3.7 DESCONEXIÓN DE LÍNEA ............................................................. 67
CONCLUSIONES ............................................................................................... 71
REFERENCIAS BIBLIOGRÁFICAS ................................................................... 97

vii
LISTA DE TABLAS
Tabla 2-1 Parámetros de las fuentes equivalentes .......................................... 44 Tabla 2-2 Datos de los transformadores.......................................................... 45 Tabla 2-3 Parámetros de las líneas de transmisión ......................................... 46 Tabla 2-4 Parámetros para la compensación serie-paralelo ........................... 46 Tabla 2-5 Parámetros de las cargas ................................................................ 48 Tabla 3-1 Parámetros para secuencia positiva ................................................ 50 Tabla 3.2 Parámetros para secuencia negativa .............................................. 50 Tabla 3-3 Parámetros generales de un STATCOM ......................................... 50

viii
LISTA DE FIGURAS
Figura 1-1 Diagrama típico de conexión de un STATCOM incluyendo filtros ....... 4 Figura 1-2 Controlador de voltaje ideal ................................................................. 5 Figura 1-3 Rango de operación de Voltaje/Corriente y Voltaje/Potencia de
un STATCOM ...................................................................................... 6 Figura 1-4 Curva característica de un STATCOM para control de voltaje,
dada en [2] ........................................................................................... 7 Figura 1-5 Sistema de transmisión de dos fuentes, con un compensador
ideal en su punto medio ..................................................................... 10 Figura 1-6 Capacidad de transferencia de potencia y margen de
estabilidad transitoria obtenible gracias a un STATCOM conectado en un punto medio de una línea de transmisión ............... 11
Figura 1-7 Forma de onda de una oscilación de potencia, amortiguada gracias a la acción de un STATCOM: (a) Ángulo del generador, (b) Potencia transmitida, y (c) Potencia reactiva inyectada por un STATCOM .................................................................................... 13
Figura 2-1 Diagrama de un STATCOM para análisis matemático ...................... 14 Figura 2-2 Diagrama fasorial para ambos modos de funcionamiento de un
STATCOM, extraída de [4] ................................................................ 15 Figura 2-3 Modelo de un compensador desacoplado, mostrado en [1] .............. 17 Figura 2-4 Sistema de control completo.............................................................. 19 Figura 2-5 Control de voltaje RMS ...................................................................... 20 Figura 2-6 Controlador de voltaje en el DC-Link ................................................. 21 Figura 2-7 Control de corriente en secuencia positiva para (a)
Componente directa, y (b) Componente en cuadratura ..................... 22 Figura 2-8 Control de Voltaje de Balance para (a) Componente en eje
directo, y (b) en Cuadratura ............................................................... 24 Figura 2-9 Control de corriente en secuencia negativa para (a)
Componente en el eje directo, y (b) Componente en eje en cuadratura.......................................................................................... 25
Figura 2-10 (a) Implementación de un Phase Locked Loop (PLL) para sincronización. (b) Transformación de ABC a componentes Alpha-Beta ......................................................................................... 26
Figura 2-11 Filtro de secuencia positiva dado en [8] ............................................. 27 Figura 2-12 Filtro de secuencia negativa dado en [8] ........................................... 28 Figura 2-13 Diagrama de bloques para Transformación de Park para (a)
Secuencia positiva, y (b) Secuencia negativa.................................... 28 Figura 2-14 Transformación Alpha-Beta y filtro de secuencia positiva para
medición de corriente ........................................................................ 29 Figura 2-15 Transformación de Park para corriente secuencia positiva ............... 30 Figura 2-16 Filtro pasabajo y Transformación Alpha-Beta, y compensación
de filtro para corriente en secuencia negativa ................................... 31 Figura 2-17 Filtraje de corriente en secuencia negativa y transformación de
Park asociada .................................................................................... 32

ix
Figura 2-18 Esquema para el generador de señales modulantes ......................... 34 Figura 2-19 Convertidor de dos niveles y forma de onda de salida, dadas en
[4] ....................................................................................................... 35 Figura 2.20 Voltaje de referencia para la fase A, usando SPWM ......................... 36 Figura 2-21 Generador de señales de switching usando SPWM para
convertidor de dos niveles ................................................................. 36 Figura 2-22 Esquema para un convertidor de tres niveles NPC y forma de
onda de salida, dada en [4]................................................................ 37 Figura 2-23 Voltaje de referencia para la fase A, usando SFO-PWM ................... 39 Figura 2-24 Voltaje de referencia para la fase A, modificado para balance
de voltaje dc....................................................................................... 41 Figura 2-25 Generador de señales de switching usando SFO-PWM
modificada, para convertidor de tres niveles NPC ............................. 42 Figura 2-26 Esquema del sistema de transmisión ................................................ 43 Figura 2-27 Sistema equivalente para condición fuerte y débil del sistema .......... 44 Figura 2-28 Modelo de línea de transmisión y compensación serie-paralelo ........ 47 Figura 2-29 Modelo para carga (a) Balanceada para sistema fuerte o débil,
y (b) Carga desbalanceada trifásica .................................................. 47 Figura 3-1 STATCOM en dos niveles: Respuesta escalón de la
componente reactiva de la corriente en secuencia positiva para sistema (a) Débil, y (b) Fuerte ........................................................... 51
Figura 3-2 STATCOM en dos niveles: Respuesta escalón del voltaje DC, para sistema (a) Débil, y (b) Fuerte ................................................... 52
Figura 3-3 STATCOM en dos niveles: Respuesta escalón del voltaje RMS, para sistema (a) Débil, y (b) Fuerte ................................................... 53
Figura 3-4 STATCOM en dos niveles: Ejemplo de formas de onda de (a) Voltaje de línea, y (b) Corriente ......................................................... 53
Figura 3-5 STATCOM en tres niveles: Respuesta escalón de la componente reactiva de la corriente en secuencia positiva para sistema (a) Débil, y (b) Fuerte ........................................................... 54
Figura 3-6 STATCOM en tres niveles: Respuesta escalón del voltaje DC, para sistema (a) Débil, y (b) Fuerte ................................................... 55
Figura 3-7 STATCOM en tres niveles: Respuesta escalón del voltaje RMS, para sistema (a) Débil, y (b) Fuerte ................................................... 56
Figura 3-8 STATCOM en tres niveles: Ejemplo de formas de onda de (a) Voltaje de línea, y (b) Corriente ......................................................... 56
Figura 3-9 Variación de carga balanceada: (a) Componente en cuadratura de la corriente en secuencia positiva. (b) Voltaje RMS en el PCC. (c) Voltaje RMS en el PCC sin acción del STATCOM .............. 58
Figura 3-10 Variación de carga balanceada: (a) Voltajes de línea en el PCC. (b) Corriente entrante al STATCOM. (c) Potencia activa y reactiva entrante STATCOM.............................................................. 59
Figura 3-11 Variación de carga desbalanceada: Componente (a) Directa, y (b) en Cuadratura de la corriente en secuencia negativa, entrante al STATCOM ....................................................................... 60

x
Figura 3-12 Variación de carga desbalanceada: Componente directa y en cuadratura del voltaje PCC en secuencia negativa, (a) Con control de secuencia negativa, y (b) Sin control de secuencia negativa ............................................................................................. 61
Figura 3-13 Variación de carga desbalanceada: (a) Componente directa de la corriente en secuencia positiva. (b) Voltajes en el DC-Link ........... 61
Figura 3-14 Variación de carga desbalanceada: (a) Componente en cuadratura de la corriente en secuencia positiva. (b) Voltaje RMS en el PCC. (c) Voltaje RMS en el PCC sin acción del STATCOM ......................................................................................... 62
Figura 3-15 Variación de carga desbalanceada: Voltajes de línea en el PCC durante (a) Conexión de la carga, y (b) Desconexión de la Carga. Corrientes de entrada al STATCOM durante (c) Conexión de la carga, y (d) Desconexión de la Carga ....................... 63
Figura 3-16 Variación de carga desbalanceada: Potencia activa y reactiva entrante STATCOM ........................................................................... 64
Figura 3-17 Falla bifásica a tierra: Componente (a) Directa, y (b) en Cuadratura de la corriente en secuencia negativa, entrante al STATCOM. Componente directa y en cuadratura del voltaje PCC en secuencia negativa, (c) Con control de secuencia negativa, y (d) Sin control de secuencia negativa .............................. 65
Figura 3-18 Falla bifásica a tierra: (a) Componente directa de la corriente en secuencia positiva. (b) Voltajes en el DC-Link ................................... 66
Figura 3-19 Falla bifásica a tierra: (a) Componente en cuadratura de la corriente en secuencia positiva. (b) Voltaje RMS en el PCC. (c) Voltaje RMS en el PCC sin acción del STATCOM ............................ 67
Figura 3-20 Falla bifásica a tierra: (a) Voltajes de línea en el PCC. (b) Corriente entrante al STATCOM. (c) Potencia activa y reactiva entrante STATCOM ........................................................................... 68
Figura 3-21 Desconexión de línea: (a) Componente en cuadratura de la corriente en secuencia positiva. (b) Voltaje RMS en el PCC. (c) Voltaje RMS en el PCC sin acción del STATCOM ............................ 69
Figura 3-22 Desconexión de línea: (a) Voltajes de línea en el PCC. (b) Corriente entrante al STATCOM. (c) Potencia activa y reactiva entrante STATCOM ........................................................................... 70

1. INTRODUCCIÓN
La demanda de energía eléctrica continúa a aumentar rápidamente,
especialmente en países en desarrollo como lo es Chile. Debido a su rápido
crecimiento, siempre es necesitada una actualización de la red eléctrica. Algunos
problemas que hay que resolver al realizarlo es la geografía. Lagos, montañas y
largas distancias dividen las principales centrales de generación de los usuarios,
por lo que cualquier intervención en la red es es siempre una tarea difícil.
La capacidad de transferencia máxima de una línea está limitada, entre
otras cosas, por los márgenes de estabilidad transitoria de los generadores
asociados. Al instalar un STATCOM ("SVC-Light" como nombre producto de
ABB), es posible aumentar este margen, mejorando el desempeño del sistema
ante fallas, conexión y desconexión de cargas, o cualquier otro fenómeno que
puede ocurrir en un sistema eléctrico de potencia. Más allá de esto, un mercado
competitivo requiere de una operación flexible del sistema, lo que es fácilmente
realizado haciendo uso de dispositivos FACTS.
Gracias a la implementación de un STATCOM en una red de transmisión,
es posible aumentar la potencia transferida y mejorar su estabilidad, sin realizar
en grandes gastos de proyecto.
Por medio de la modelación detallada de un sistema de transmisión, es
posible mostrar cómo este sistema se ve beneficiado, gracias a la acción de un
STATCOM. En este trabajo se analiza mayoritariamente problemas de
estabilidad de voltaje, clarificando el mejoramiento del sistema, antes distintos
escenarios.
El objetivo de esta tesis es dar a entender e ilustrar los beneficios que
puede aportar un STATCOM (de la familia FACTS) a un sistema de transmisión.
Serán analizados dos tipologías de convertidores: convertidor en dos niveles, y
convertidor en tres niveles, incluyendo sus controles y funciones de switching.
Un modelo apropiado de un sistema eléctrico de potencia será modelado, y el
comportamiento del STATCOM será estudiado ante diversas contingencias.
2
Finalmente, se presentarán las conclusiones que incluirán la discusión general
de los resultados y se propondrán temas de investigaciones futuras.
El objetivo y sus motivaciones son escritos en esta sección. En el Capítulo
2 se abordan los conceptos de control de voltaje y mejoramiento de la estabilidad
transitoria y capacidad de transmisión, gracias a la inyección de potencia
reactiva en la red. En el Capítulo 3 es ilustrado el modelo del STATCOM,
incluyendo los algoritmos de medición, control de voltaje y corriente en
secuencia positiva y negativa, y generación de señales de switching para el
STATCOM en dos niveles y en tres niveles. En Capítulo 4 se muestra el
resultado de las simulaciones realizadas, y finalmente en Capítulo 5 son
entregadas las conclusiones de toda la experiencia realizada

CAPÍTULO 1
1 DESCRIPCIÓN GENERAL DE UN STATCOM
1.1 INTRODUCCIÓN
Este capítulo ofrece conceptos básicos sobre el STATCOM, detallando
una descripción del dispositivo como un compensador shunt, incluyendo el
control de tensión y la inyección de potencia reactiva. El rango de tensión y
corriente de la operación también se especifica para los requerimientos mínimos.
Para una mejor comprensión, otras características del STATCOM tales como de
compensación de carga, capacidad de transferencia de líneas de transmisión y
mejora de la estabilidad transitoria son descritas en este capítulo. Otras
características del STATCOM son expuestas, tales como la amortiguación de
oscilaciones electromecánicas y su operación con dispositivos de
almacenamiento de energía.
1.2 DESCRIPCIÓN DEL SISTEMA
El compensador estáticos de reactivos o STATCOM es un equipo de
compensación reactiva en derivación, capaz de generar o absorber potencia
reactiva desde el Punto de Acoplamiento Común (PCC en adelante, por sus
siglas en inglés) con el sistema de potencia. Su salida se puede variar con el fin
de mantener el control de un parámetro específico del sistema eléctrico, tales
como el voltaje, frecuencia o ángulo de tensión [4].
El nombre STATCOM se deriva del hecho de que no tiene elementos
giratorios y se basa en la electrónica de estado sólido del silicio, para
dispositivos de conmutación [4]. Como se muestra en la Figura 1-1, un
STATCOM está compuesto por un inversor de tensión (VSI en adelante) que
está conectado con el PCC a través de un inductor de interfaz Lf (por lo general
0,1-0,15 PU). El dispositivo convierte la tensión continua de su condensador en
el lado DC, en en una tensión trifásica en el lado CA, que están etiquetados
como Vt en la Figura 1-1. Los bancos de filtros armónicos están conectados con

4
el PCC para eliminar los armónicos producidos por el convertidor. Los filtros
están sintonizados para frecuencias entre la 3ra hasta 99a armónica,
manteniendo el voltaje en el PCC lo más sinusoidal posible. También producen
energía reactiva, y como resultado, el rango de operación reactivo del
STATCOM más los filtros no es simétrica. Esto significa que puede entregar más
potencia reactiva de la que puede absorber. En este caso, el punto PCC está
conectado a la red mediante un transformador de acoplamiento que aumenta la
tensión a los niveles de transmisión. Este transformador tiene generalmente una
estrella de conexión a tierra desde el lado de alto voltaje, (primaria) y la conexión
delta por lado de media tensión (secundario).
Debido a la naturaleza de los convertidores electrónicos de potencia, la
magnitud, así como el ángulo de fase de la tensión Vt se puede ajustar
rápidamente. Además, el control del convertidor está sincronizado con el vector
de tensión PCC. Como resultado, la magnitud, así como el ángulo de la corriente
It puede ser controlada dinámicamente, tal como se explica en la sección
fL
tI
tV
SVSX
filterXfilterR
filterC
1C 2C
DCV
Figura 1-1 Diagrama típico de conexión de un STATCOM incluyendo filtros.

5
3.2. Por lo tanto, como se muestra en la Figura 2-2, un STATCOM puede ser
modelado como una fuente de corriente directamente conectada con el PCC. La
referencia de corriente es proporcionada por un regulador de voltaje RMS que
regula la tensión de PCC para el seguimiento de una referencia específica [3].
1.2.1 Control de voltaje e inyección de potencia reactiva
La tensión en el PCC es totalmente controlable entre el rango de
operación de las características del STATCOM. El rango de operación se define
por la capacidad de corriente del inversor. De una manera simple, el STATCOM
puede ser modelado por una fuente de corriente como se muestra en la Figura 1-
2.
Cuando la carga está absorbiendo una gran cantidad de potencia reactiva,
el voltaje Vs caerá debido a la impedancia del Xs sistema, y el compensador
inyectará corriente capacitiva con el fin de alzar la tensión. Del mismo modo,
cuando el sistema está en condiciones de carga ligera, el compensador se
inyecta corriente inductiva de manera de compensar los efectos de la capacidad
en las líneas de transmisión. En resumen, la carga se beneficia de un voltaje
controlado por la acción del compensador.
ºEl margen de de control sobre el voltaje es de aproximadamente 10% de
su valor de referencia, o entre 0,95 pu y 1.05 pu. La tensión en los terminales del
sVSX
Figura 1-2 Controlador de voltaje ideal.

6
inversor puede variar dependiendo de la corriente de compensación requerida.
En cuanto a los límites reales, el STATCOM es simétrico, que en base propia
quiere decir 1 pu en modo capacitivo y un 1 en modo inductivo. Si se utilizan los
filtros, el sistema completo tendrá un desplazamiento en sus límites, por ejemplo,
1.4 pu en modo capacitivo y en 0,65 pu en modo inductivo. Durante un transitorio
en corriente, el control tratará de reducir la corriente nuevamente al margen de la
operación, debido a la limitación de corriente de las válvulas [4].
El rango de operación del STATCOM depende básicamente de su
dimensionamiento. En base a su topología y a las propiedades de las válvulas,
las limitaciones de corriente proporciona el rango normal de operación y rango
transitorio del inversor.
Para un mejor entendimiento acerca del control de voltaje, se pueden
incluir en la Figura 1-3 las curvas que representan las características del
sistema. En el ejemplo mostrado a continuación, las rectas "Load line" 1, 2 y 3
corresponden a las diferentes impedancias para un sistema, vistas desde el
PCC.
En primera instancia, se define el "slope" o pendiente, como la razón
entre la deviación máxima de voltaje Vt desde su valor nominal, para un máximo
maxLImaxCI maxLQmaxCQ
Figura 1-3 Rango de operación de Voltaje/Corriente y Voltaje/Potencia de un
STATCOM.

7
maxLImaxCI 3LI2CI
refVmaxLV
maxCV
3TV
2TV
Figura 1-4 Curva característica de un STATCOM para control de voltaje, dada en
[2].
de corriente circulante. Esta razón es del orden del 1-5 % [2]
κ = =
Normalmente, el control mediante "slope" es usado en sistemas de
transmisión, debido a que facilita la repartición de carga entre distintos
compensadores, al igual que mejora el desempeño del dispositivo FACTS en
sistemas débiles.
En la Figura 1-4 es mostrado el rango de operación para diferentes
impedancias de sistema.
Load line 1 intercepta la curva característica V-I del compensador en un
punto de voltaje nominal. En este caso, la corriente de salida del
STATCOM es cero, y el voltaje controlado es igual a su referencia.
Para Load line 2, la cual se encuentra debajo de Load line 1 debido a una
baja de tensión, la intersección con la curva característica V-I del
compensador insta a inyectar una corriente capacitiva Ic2, para mantener
el voltaje en su valor de referencia. El voltaje en el punto PCC sería V2 en
el caso de que no exista compensación.
Para Load line 3, que está arriba de Load line 1 debido a una subida de
tensión, la intersección de las curvas genera una referencia de corriente
(2-1)

8
inductiva Il3, la cual baja el voltaje en el PCC para mantenerlo en su valor
de referencia.
En el caso de que el STATCOM no ejerza ningún control sobre la tensión
en el punto PCC, éste variará siguiendo las características del sistema, tal como
se muestra en el Capítulo 4.
Adicionalmente, un STATCOM puede proporcional su corriente máxima
de compensación incluso durante bajas o subidas abruptas de voltaje. El uso de
la electrónica de potencia en este tipo de dispositivo ofrece un control rápido de
su voltaje en los terminales, mejorando la estabilidad del sistema [4].
1.3 OTRAS APLICACIONES DE UN STATCOM
1.3.1 Compensación de carga
En un sistema correctamente diseñado, el voltaje es usualmente
balanceado entre sus tres fases, por lo que un compensador controla sus tres
fases en forma conjunta. El control principal de un STATCOM está diseñado
para proveer soporte durante fluctuaciones de voltaje en secuencia positiva,
inyectando o absorbiendo corriente en esta secuencia. En casos donde el
desbalance entre fases sea notorio, (mayor al 5%), mediante un sistema de
control en secuencia negativa es posible proveer compensación en secuencia
negativa, tal como se explica en el Capítulo 3.
El dimensionamiento de un STATCOM está hecho en base a su
capacidad de compensación en secuencia positiva, sin embargo, es posible
utilizar parte de esta potencia disponible para compensar en secuencia negativa.
Este tipo de compensación requiere de un voltaje DC elevado, por lo que
siempre está limitada como una función secundaria. No obstante, diferentes
técnicas de modulación se han aplicado para aprovechar al máximo el voltaje DC
tales como SPWM o SFO-PWM.
Una desventaja de un STATCOM cuando realiza este tipo de funciones es
el contenido armónico generado. Cuando se trabaja en secuencia positiva, el
convertidor genera armónicos entorno a la frecuencia de conmutación. Cuando

9
se controla, el voltaje en secuencia negativa mediante la inyección de corriente
en secuencia negativa, se crea una componente en tercera armónica que fluye
en secuencia positiva desde el convertidor hacia la red, al mismo tiempo que se
genera la componente fundamental en secuencia negativa. A su vez, existe una
oscilación al doble de la frecuencia fundamental que circula por el circuito DC,
afectando a todas las secuencias producidas en el lado AC [2]. Implementar un
control de secuencia negativa influye en dimensionamiento de los filtros y del
capacitor en el lado DC, sin embargo, durante un transiente, se estima que el
con tributo armónico generado por el convertidor es mucho menor que el
generado por las máquinas rotantes o dispositivos electrónicos presentes en el
sistema [2], [4].
En un correcto diseño del convertidor, la variación del voltaje DC debido a
la componente en secuencia negativa generada no afecta su condición de
compensador para secuencia positiva, a no ser que éste varíe demasiado, fuera
de los límites de seguridad. Dado lo anterior, es posible generar los voltajes e
inyectar las corrientes tanto en secuencia positiva y secuencia negativa sin
mayores repercusiones en el sistema.
Un STATCOM puede representarse como un compensador ideal, como
se muestra en Figura 1-2, para ambas secuencias, sin embargo, este
comportamiento ideal es un compromiso entre un contenido armónico aceptable
y un capacitor DC suficientemente robusto versus un alto costo en filtros y
elementos pasivos del convertidor. Mejoramiento de la capacidad de potencia
transferida y margen de estabilidad transitoria
Unos de los objetivos de un compensador en un sistema de transmisión
es aumentar la capacidad de transferencia de éste. Un sistema de transmisión
modelado como se muestra en Figura 2.5, se puede probar que para distintas
potencias del convertidor, el sistema mejora su capacidad de transferencia de
potencia y su margen de estabilidad transitoria.

10
STATCOM
SV2/SX
2sin tUVSEND
2sin
tUVRECEIVER
2/SX
SENDV RECEIVERV
TV
fL
maxCI
Figura 1-5 Sistema de transmisión de dos fuentes, con un compensador ideal en
su punto medio.
La potencia total transferida por la línea sin compensar está dada por la
siguiente expresión:
P = P sinδ con P =
Donde U es la magnitud de ambos voltajes (el que envía y el que recibe),
δ es el ángulo entre ambos voltajes, Xs es la reactancia equivalente que
interconecta ambas fuentes, P es la potencia activa transferida y Po es su
máximo.
El máximo de potencia transferida se alcanza cuando δ es igual a 90 grados.
Cuanto el compensador se conecta en el punto medio de la línea, la impedancia
equivalente es dividida en Xs/2. La potencia total transferida es modificada como
se muestra en la siguiente expresión:
P = sin = 2P sin
Ahora el nuevo máximo de potencia se alcanza cuando el ángulo δ es
igual a 180 grados. El impacto de un STATCOM en un sistema de transmisión es
visible en Figura 1-6, donde es mostrada la modificación de la curva original[2].
para distintos dimensionamientos del convertidor, asociados a su corriente Icmax
La máxima transferencia de potencia, ahora gracias a un dimensionamiento de
un STATCOM, está dada por la siguiente expresión:
(2-2)
(2-3)

11
P = sinδ + sin
Es de notar que un STATCOM provee un margen de estabilidad
considerable, especialmente para ángulos entre 90 y 180 grados. El margen de
estabilidad aumenta, al aumentar la corriente Icmax.
Las aéreas representadas en la Figura 1-6 son explicada de la siguiente
manera, como se pueden encontrar en [4]: dado que el torque mecánico en el
generador se mantiene constante, al momento de una falla el torque eléctrico se
ve reducido considerablemente. Esto provoca una aceleración con una energía
proporcional al área A1, llevando el ángulo δ desde δ1 a δc. Cuando la falla se
elimina, mediante un sistema de protección adecuado, la maquina rotante
comienza a desacelerar, con una energía desacelerante proporcional al área A2,
pero su ángulo continúa a aumentar hasta δmax, debido a la inercia de éste. El
ángulo δcr se define cuando la energía acelerante es igual a la máxima energía
Figura 1-6 Capacidad de transferencia de potencia y margen de estabilidad
transitoria obtenible gracias a un STATCOM conectado en un punto medio de una línea de transmisión.
(2-4)

12
desacelerante disponible por la máquina. Si la energía acelerante adquirida por
la máquina supera a la desacelerante, vale a decir, ángulo δmax mayor a δcr
entonces el generador pierde sincronismo y colapsa el sistema.
El área definida como Margin en la Figura 1-6 provee un margen de
estabilidad, utilizado para desacelerar a la máquina en caso de falla. El
STATCOM, gracias a la inyección de potencia reactiva, puede aumentar esta
área, brindando una mayor energía desaclerante al sistema.
1.3.2 Amortiguamiento de oscilaciones electromecánicas
La capacidad del sistema de amortiguar las oscilaciones de potencia está
dada por el diseño del sistema de transmisión, del diseño de los generadores y
sus controles y del tipo de carga que esté conectada al sistema [4]. Las
oscilaciones de potencia en las líneas, o bien las oscilaciones electromecánicas
al interior de las unidades generadoras producto del despeje de una falla, o una
resonancia entre los parámetros del sistema, tienen una frecuencia entre 0.2 Hz
a 2.5 Hz [2]. Estas oscilaciones son críticas cuando se alcanza la frecuencia
torsional de un generador.
Un STATCOM con un control implementado para este tipo de fenómenos
puede mejorar la capacidad de amortiguación total del sistema. Sin embargo, su
efectividad dependerá de su posición relativa a los generadores y cargas, y de
su dimensionamiento en términos de potencia, comparado con la contribución
total del sistema.
En la Figura 1-7 está representada una típica oscilación electromecánica,
y su amortiguación gracias a la modulación de potencia reactiva inyectada por un
STATCOM. Se asume que el torque mecánico es constante durante el
transiente, por lo que al disminuir el torque eléctrico, el generador tiende a
acelerar, y su ángulo aumenta (dδ/dt ≥ 0). Para aumentar el torque eléctrico, el
STATCOM inyecta potencia reactiva al sistema, aumentando la capacidad de
transferencia de potencia por las líneas de transmisión.

13
Figura 1-7 Forma de onda de una oscilación de potencia, amortiguada gracias a la acción de un STATCOM: (a) Ángulo del generador, (b) Potencia transmitida, y
(c) Potencia reactiva inyectada por un STATCOM.
Una vez que la máquina comienza a desacelerar debido a que el torque
eléctrico supera al torque mecánico, su ángulo decrece (dδ/dt ≤ 0) y el
STATCOM absorbe potencia reactiva disminuyendo la potencia transferida por
las líneas [2].
1.3.3 STATCOM con dispositivos de almacenamiento de energía
Las estructuras de conversión que se usan en un STATCOM facilitan el
control independiente de potencia activa y reactiva [1] a [6] y [11]. La inyección
simultánea de ambas potencias ayuda al sistema al momento de recuperación.
En algunos casos, las oscilaciones electromecánicas se amortiguan con mayor
efectividad si se usa energía activa, como por ejemplo, cuando se conecta un
STATCOM en cercanía de un generador. Otras aplicaciones tales como
mitigación del flicker y control de frecuencia son realizables gracias a la inclusión
de dispositivos de almacenamiento de energía [4].

CAPÍTULO 2
2 CONTROL DE UN STATCOM E INTEGRACIÓN EN LA RED
2.1 INTRODUCCIÓN
Este capítulo provee una descripción matemática del control de un
STATCOM. La estrategia de control y los modelos presentados son realizados
en el plano DQ, usando la Transformación de Park. Los controles para secuencia
positiva y secuencia negativa son explicados separadamente. También es
mostrada una descripción de las funciones de switching. Finalmente la red de
transmisión implementada es explicada en detalle.
2.2 MOLDEAMIENTO DE UN STATCOM PARA CONTROL DE CORRIENTE
2.2.1 Modelo analítico
El control de voltaje se realiza mediante el intercambio de potencia entre
el STATCOM y la red, en el punto de acoplamiento común o PCC. Si se
considera el STATCOM mostrado en la Figura 2-1, es posible lograr la inyección
de potencia reactiva al variar la magnitud del voltaje en los terminales V =
vt , vt , vt .
En posible despreciar la resistencia R ya que es relativamente baja en
comparación a X . La potencia reactiva intercambiada en el punto PCC puede
aitbitcit
avsbvscvs
avtbvtcvt
fLfR
Figura 2-1 Diagrama de un STATCOM para análisis matemático.
Al expresar el sistema en componentes vectoriales, es posible denotar:
I =
≈ I =
(3-1)

15
sVtsIjXtI tV
sV
tsIjXtI tV
Figura 2-2 Diagrama fasorial para ambos modos de funcionamiento de un
STATCOM, extraída de [4].
describirse en manera similar a un compensador síncrono rotatorio [4]. Las
ecuaciones se representan en un diagrama fasorial, tal como se muestra en la
Figura 2-2.
Si la amplitud del voltaje de salida del convertidor V del fasor V es mayor
que la amplitud del voltaje en el punto PCC, denotado V , cuyo vector
correspondiente es V, entoces el fasor de corriente I adelanta al fasor del
voltaje en los terminales V y la corriente fluye desde el convertidor hacia el
sistema, entrando al punto PCC [2], [4]. El STATCOM en este caso trabaja en
modo capacitivo, generando potencia reactiva. Similarmente, si la amplitud V del
fasor V es menor que la amplitud del voltaje V en el punto PCC, el fasor de
corriente de salida del convertidor I está retrasado con respecto a su voltaje V,
y la corriente fluirá desde el punto PCC hacia el convertidor. En este caso, el
STATCOM absorve potencia reactiva, y se encuentra en modo inductivo.
Naturalmente, si la magnitud V es igual a la magnitud de V , no existirá
intercambio de potencia reactiva.
Como es mostrado en Figura 1-2, el STATCOM puede ser modelado
como una fuente de corriente, en vez de una fuente de voltaje en serie a una
impedancia. La corriente de salida de esta fuente de corriente ficticia sigue una
referencia creada por el controlador del convertidor. En efecto, esta corriente es
mayoritariamente reactiva, pero posee una pequeña parte real, dado las
pérdidas y la mantención del voltaje en el capacitor en el lado DC. La

16
implementación del controlador de corriente es justificada mediante la
implementación de las ecuaciones dinámicas del STATCOM [1], [5].
El voltaje instantáneo en el punto PCC es dado por:
vs = V sin(ω t)
vs = V sin(ω t − )
vs = V sin(ω t + )
donde vs vs y vs son los valores instantáneos, asumiendo V como la magnitu
de éste y ω como la frequencia del sistema descrita en radianes por segundo.
La dinámica de las comonentes instantáneas del circuito mostrado en la
Figura 2-1 son descritas en la siguiente ecuación:
L + it R + vt = vs
L + it R + vt = vs
L + it R + vt = vs
donde it , it y it es la corriente instantánea por fase, fluyendo hacia el
convertidor, L es la inductancia de interfase con R su resistencia interna.
Mediante la transformación de Park [1], [5], las ecuaciones dinámicas son
descritas como:
L + it R = ω L it + vs − vt
L + it R = −ω L it + vs − vt
donde it y it es la componente directa y en cuadratura de la corriente entrante
al convertidor, respectivamente, en el plano DQ. Similarmente vt y vt es el
votaje instantáneo en los terminales del convertidor, en el plano DQ, y finalmente
vs y vs son las componentes del voltaje en el punto PCC, en el plano DQ.
(3-2)
(3-8)
(3-9)
(3-5)
(3-6)
(3-7)
(3-3)
(3-4)
17
RsL 1du dit
RsL 1qu qit
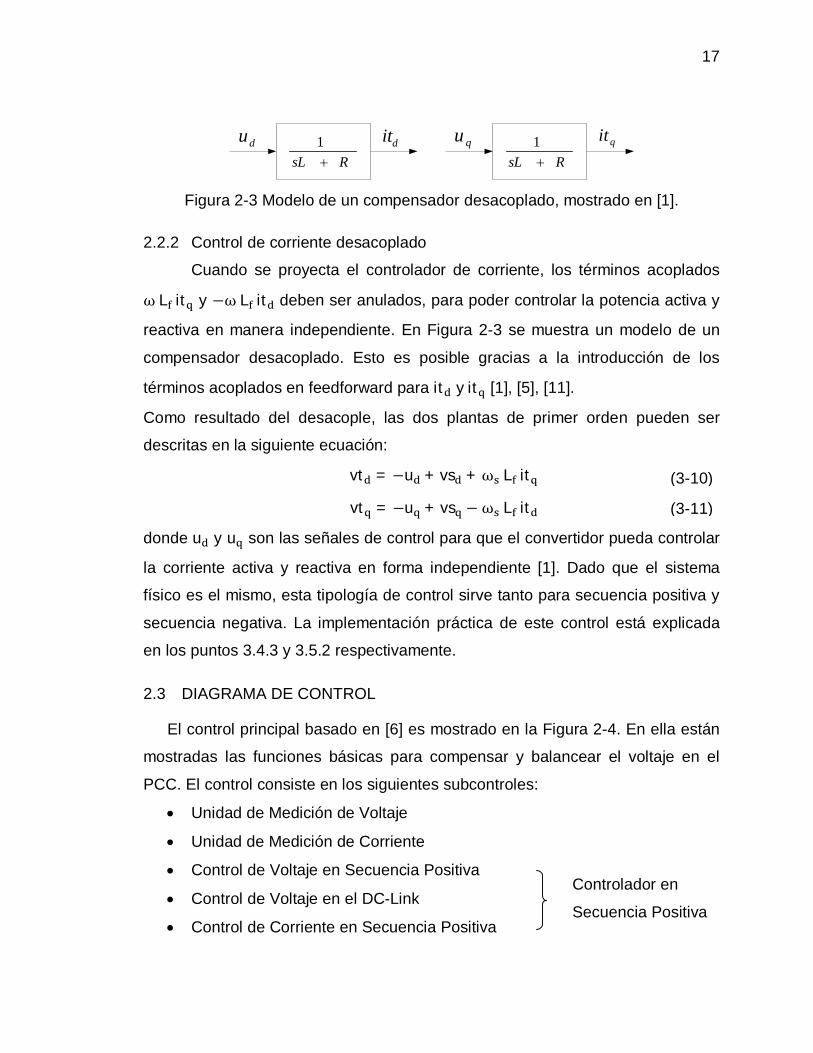
Figura 2-3 Modelo de un compensador desacoplado, mostrado en [1].
2.2.2 Control de corriente desacoplado
Cuando se proyecta el controlador de corriente, los términos acoplados
ω L it y −ω L it deben ser anulados, para poder controlar la potencia activa y
reactiva en manera independiente. En Figura 2-3 se muestra un modelo de un
compensador desacoplado. Esto es posible gracias a la introducción de los
términos acoplados en feedforward para it y it [1], [5], [11].
Como resultado del desacople, las dos plantas de primer orden pueden ser
descritas en la siguiente ecuación:
vt = −u + vs + ω L it
vt = −u + vs − ω L it
donde u y u son las señales de control para que el convertidor pueda controlar
la corriente activa y reactiva en forma independiente [1]. Dado que el sistema
físico es el mismo, esta tipología de control sirve tanto para secuencia positiva y
secuencia negativa. La implementación práctica de este control está explicada
en los puntos 3.4.3 y 3.5.2 respectivamente.
2.3 DIAGRAMA DE CONTROL
El control principal basado en [6] es mostrado en la Figura 2-4. En ella están
mostradas las funciones básicas para compensar y balancear el voltaje en el
PCC. El control consiste en los siguientes subcontroles:
Unidad de Medición de Voltaje
Unidad de Medición de Corriente
Control de Voltaje en Secuencia Positiva
Control de Voltaje en el DC-Link
Control de Corriente en Secuencia Positiva
Controlador en
Secuencia Positiva
(3-10)
(3-11)

18
Control de Balance de Voltaje
Control de Corriente en Secuencia Negativa
Generador de Señales Moduladoras
Generador de Señales Switching
Básicamente, la señal de voltaje que llega desde el PCC es procesada por la
Unidad de Medición de Voltaje quien entrega al control todas las variables de
voltaje separadas en secuencia positiva y secuencia negativa, en el plano DQ.
Similarmente, la Unidad de Medición de Corriente entrega al control las variables
de corriente, en ambas secuencias y en el plano DQ.
El Control de Secuencia Positiva es usado para controlar el voltaje en el
punto PCC y también para controlar el voltaje del DC-Link. El Control de Voltaje
en Secuencia Positiva regula el voltaje en el PCC manteniéndolo en su valor
referencial, mediante la inyección y absorción de potencia reactiva, mientras que
el Control de Voltaje en el DC-Link regula el voltaje en el capacitor DC mediante
la inyección o absorción de potencia reactiva. En manera similar, el Controlador
en Secuencia Negativa se encarga de mantener en cero la componente en
secuencia negativa del voltaje en el PCC, haciendo uso del Controlador de
Balance de Voltaje mediante el intercambio de potencia activa y reactiva con la
red, en secuencia negativa. Los controles de corriente generan la corriente
deseada para realizar control y el balance de los voltajes [6]. El Generador de
Señales Moduladoras sirve para limitar el voltaje de salida en los rangos de
operación del STATCOM, mientras que el Generador de Señales de Switching
se encarga de producirlo en los terminales del convertidor.
2.4 CONTROLADOR EN SECUENCIA POSITIVA
El control en secuencia positiva tiene la responsabilidad de controlar el
voltaje RMS en el PCC además de mantener el voltaje total del DC-Link en su
valor nominal. Este control se compone de un control de voltaje RMS, control de
voltaje DC y control de corriente en secuencia positiva.
Controlador en
Secuencia Negativa

19
kVVb
us36
POS
dVs
POS
qVs
NEG
dVs
NEG
qVs
t
t
STAT
COM
I
POS
dIt
POS
qIt
NEG
dIt
NEG
qIt
POS
dVs
RMS
Vsre
f
ref
ItPO
Sq
ref
ItPO
Sd
ref
ItN
EGd
ref
ItNE
Gq
ref
VD
C
DC
V
NEG
dVs
N
EGq
Vs
ref
VsN
EGd
ref
VsNE
Gq
NEG
dIt
NE
Gq
It
POS
dIt
POS
qIt
U
nld
Vt
Unl
qVt
U
nld
Vt
U
nlq
Vt
ref
Avt
ref
Bvt
ref
Cvt
ABC
Gat
es
St
POS
dVs
PO
Sq
Vs
NEG
dVs
N
EGq
Vs
Figura 2-4 Sistema de control completo.

20
2.4.1 Control de voltaje en secuencia positiva
El Control de Voltaje en Secuencia Positiva [1] es mostrado en la Figura
2-5. Compara el voltaje RMS de referencia para el punto PCC (controlado en
1.05 pu en las simulaciones) con la componente Vs del voltaje medido en el
mismo punto, normalizado por su valor peak. En controlador PI provee la
cantidad de corriente reactiva en secuencia positiva It ref para mantener el
voltaje en su valor adecuado.
POSdVs
RMSVs ref
is1
pk
q POSIt ref
Figura 2-5 Control de voltaje RMS.
Notar que la componente "Q" del voltaje en el punto PCC Vs es cero,
debido a que para crear estas componentes DQ, se utiliza el mísmo ángulo de
referencia en el punto PCC. Por lo tanto, la señal Vs normalizada
representa todo el voltaje en el PCC, es comparable con Vs ref, y son
suficientes para controlar el voltaje en sequencia positivia. El controlador PI está
limitado para evitar la integración fuera del rango del convertidor, y un segundo
limitador se usa en la salida, para que la componente resultante calculada esté
siempre en el rango de operación del STATCOM.
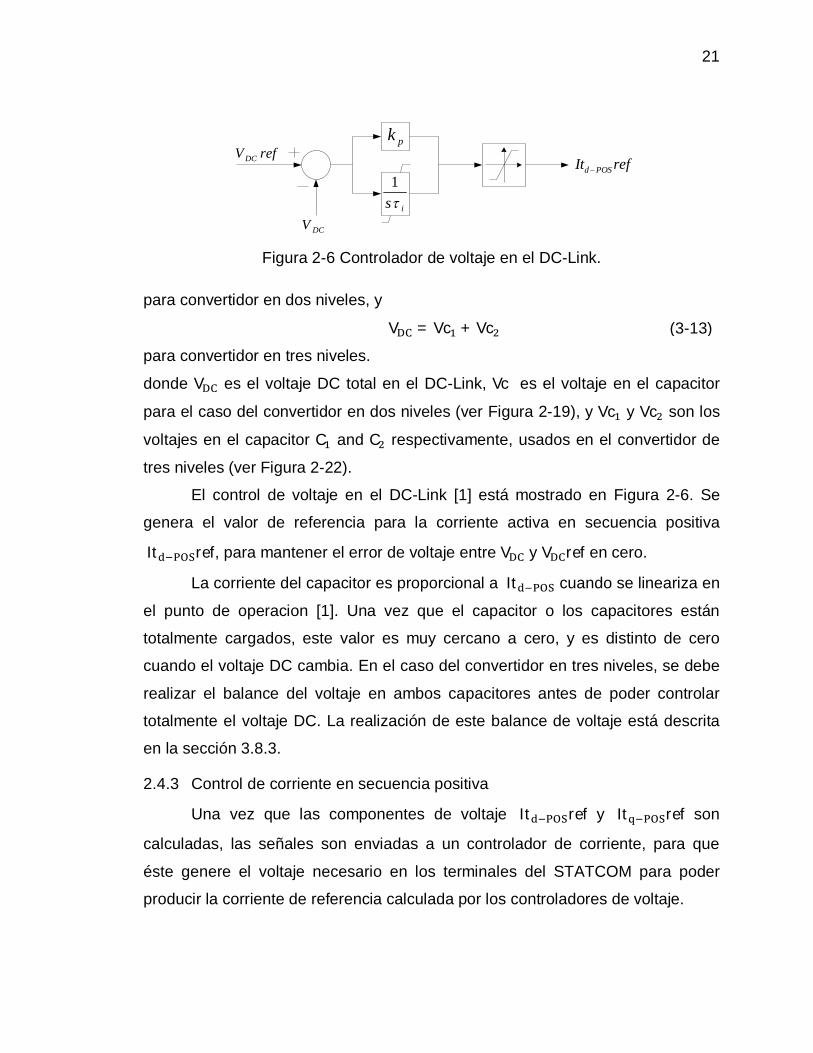
2.4.2 Control del voltaje en el DC-Link
El voltaje en el DC-Link es controlado mediante el intercambio de potencia
activa desde el PCC y el convertidor [1]. El DC-Link consiste en un solo capacitor
para el caso del convertidor de dos niveles, y dos capacitores separados por un
punto medio, para el caso de tres niveles.
V = Vc
(3-12)
21
refV DC
DCVis
1
pk
d POSIt ref
Figura 2-6 Controlador de voltaje en el DC-Link.
para convertidor en dos niveles, y
V = Vc + Vc
para convertidor en tres niveles.
donde V es el voltaje DC total en el DC-Link, Vc es el voltaje en el capacitor
para el caso del convertidor en dos niveles (ver Figura 2-19), y Vc y Vc son los
voltajes en el capacitor C and C respectivamente, usados en el convertidor de
tres niveles (ver Figura 2-22).
El control de voltaje en el DC-Link [1] está mostrado en Figura 2-6. Se
genera el valor de referencia para la corriente activa en secuencia positiva
It ref, para mantener el error de voltaje entre V y V ref en cero.
La corriente del capacitor es proporcional a It cuando se lineariza en
el punto de operacion [1]. Una vez que el capacitor o los capacitores están
totalmente cargados, este valor es muy cercano a cero, y es distinto de cero
cuando el voltaje DC cambia. En el caso del convertidor en tres niveles, se debe
realizar el balance del voltaje en ambos capacitores antes de poder controlar
totalmente el voltaje DC. La realización de este balance de voltaje está descrita
en la sección 3.8.3.
2.4.3 Control de corriente en secuencia positiva
Una vez que las componentes de voltaje It ref y It ref son
calculadas, las señales son enviadas a un controlador de corriente, para que
éste genere el voltaje necesario en los terminales del STATCOM para poder
producir la corriente de referencia calculada por los controladores de voltaje.
(3-13)

22
POSqIt
POSdIt S f q POSL It
UnldVt
UnlqVt
POSdVs
POSqVs
refIt POSq
refIt POSd
is1
pk
is1
pk
S f d POSL It
d POSu
q POSu
Figura 2-7 Control de corriente en secuencia positiva para (a) Componente
directa, y (b) Componente en cuadratura.
El control de corriente está modelado con las siguientes ecuaciones
explicadas en el punto 1.2, pero solo haciendo uso de componentes en
secuencia positiva [1], [5], [6]:
vt = −u + vs + ω L it
vt = −u + vs −ω L it
Figura 2-7 muestra el control implementado, incluyendo los términos en feedforward.
El error entre It ref y It , y entre It ref y It son
procesador por dos controladores PI idénticos [6]. La salida de cada controlador
es la señal de control u y u . Lugo, son enviados a la sumatoria
representativa de cada ecuación para cada eje, donde son agregados también
los términos ω L it y ω L it en el eje D y Q respectivamente. Finalmente, la
salida del controlador de corriente es vt y vt como el voltaje terminal
del STATCOM en eje D y Q respectivamente [6].
(3-14)
(3-15)

23
Es subíndice Unl por "Unlimited" es debido a que estos valores no están
necesariamente dentro de los rangos de voltaje del STATCOM,
independientemente de que la corrientes de referencias lo estén. Un block
llamado Generador de Señales Modulantes es usado para tal propósito.
Estos controladores son suficientemente rápidos para producir un escalón
en menos de un ciclo eléctrico. El único escalón permitido es en el eje Q, ya que
si se hiciera en el eje D, el voltaje en el lado DC aumentaría sin control.
Obviamente, se pueden aplicar escalones en ambos voltajes (RMS y DC), pero
solamente se puede aplicar un escalón de corriente en el eje Q.
2.5 CONTROLADOR EN SECUENCIA NEGATIVA
El controlador en secuencia negativa tiene la responsabilidad de balancear
el voltaje en el PCC mediante la inyección de corriente en secuencia negativa
[6], [7]. El controlador posee dos subcontroles: controlador de balance de voltaje
y control de corriente en secuencia negativa.
2.5.1 Controlador de balance de voltaje
El controlador de balance de voltaje es el responsable de generar la
referencia de corriente en secuencia negativa, de tal manera que el voltaje DQ
en secuencia negativa se anule.
En la Figura 2-8 se muestra el control para balancear el voltaje. Los
controladores PI tienen como entrada Vs y Vs ref, y Vs y
Vs ref respectivamente. Las referencias de voltaje en ambos ejes son
siempre cero dado que se desea remover todo el contenido de voltaje en
secuencia negativa. Los integradores están limitados al igual que su salida,
asegurando un mínimo de tiempo de integración y una referencia de corriente
dentro de los límites del STATCOM. Finalmente, la corriente It ref y
It ref generadas por los controladores son las necesarias para anular el
voltaje de secuencia negatva presente en el PCC. Estas corrientes son
direccionadas al control de corriente en secuencia negativa explicado en el punto
siguiente.

24
is1
pk
is1
pk
refIt NEGd
NEGdVs
NEGqVs
refVs NEGd
refVs NEGq refIt NEGq
Figura 2-8 Control de Voltaje de Balance para (a) Componente en eje directo, y
(b) en Cuadratura.
En aplicaciones de transmisión, este control es siempre secundario y con
constantes de tiempo grandes. Para poder mostrar las funcionalidades de esta
implementación dentro de un tiempo de simulación razonable, se utilizó una
constante de tiempo entre 0,02 y 0,05 milisegundos.
2.5.2 Control de corriente en secuencia negativa
Una vez calculadas las referencias de corriente para secuencia negativa,
en eje D y Q, el siguiente paso es generar el voltaje necesario en la salida del
convertidor para poder inyector las Corrientes de referencia. La siguiente
ecuación mostrada en el punto 3.2 escritas para secuencia negativa
vt = −u + vs + ω L it
vt = −u + vs −ω L it
modelan el controlador en secuencia negativa, que es mostrado en Figura 2-9
incluyendo términos en feedforward.
Similarmente a las descripciones para secuencia positive, el controlador
de corriente en secuencia negativa trabaja en base al error entre It ref
y It , y entre It ref y It en ambos ejes del plano DQ. A la salida de
cada integrador se implementa el resto de la ecuación, incluyendo los términos
(3-16)
(3-17)

25
S f q NEGL It
UnldVt
UnlqVt
NEGdVs
NEGqVs
is1
pk
is1
pk
S f d NEGL It
(a)
(b)
refIt NEGd
refIt NEGq
NEGdIt
NEGqIt
d NEGu
q NEGu
Figura 2-9 Control de corriente en secuencia negativa para (a) Componente en el
eje directo, y (b) Componente en eje en cuadratura.
ω L it y ω L it . Al final de cada control se tiene como salida vt
y vt respectivamente. Se denotan como “unlimited” debido a que, si bien
corresponden a los valores de voltaje necesarios para producir las corrientes en
secuencia negativa, estos no están necesariamente dentro del rango de
operación del convertidor. Tanto el control de secuencia positiva y negativa
tienen las mismas constantes de tiempo, dado que el sistema que controlan es el
mismo.
2.6 UNIDADES DE MEDICIÓN
2.6.1 Unidad de medición de voltaje
Este block está diseñado para entregar al control todas las variables de
voltaje necesarias para operar (ver Figura 2-4), tales como ω t como ángulo de
giro del vector, Vs y Vs para control en secuencia positiva, y Vs y
Vs para secuencia negativa.

26
2.6.1.1 Medición de voltaje en secuencia positiva
Desde el PCC, se obtiene un voltaje trifásico denominado como
Vbus , que se compone de las siquientes de voltajes vs , vs , y vs . Estos
tres voltajes van directamente a un PLL (Phase Locked Loop) el cual entrega
como salida el ángulo de giro del vector de voltaje ω t, tal como se muestra en
Figura 2-10 (a). También los voltajes se convierten en componentes Alpha-Beta
como mostrado en Figura 2-10 (b) donde se obtienen las señales Vs y Vs .
Para extraer solo la componente en secuencia positiva, se usa el filtro
mostrado en Figura 2-11. Este filtro está sintonizado en +50 Hz. Para secuencia
negativa, se usa un filtro similar mostrado en Figura 2-12. El filtro dado en [8] se
compone de un filtro pasabanda complejo, el cual deja pasar con ganancia
unitaria la componente en 50 Hz en secuencia positiva, mientras que toda la
componente en secuencia negativa se bloquea. La función de transferencia del
filtro está dada por:
G (s) =( )
( )
donde
G (s) = − j
cbakV vsvsvsVbus ,,36
Avs
StBvs
Cvs
Avs
Bvs
Cvsvs
vs
Figura 2-10 (a) Implementación de un Phase Locked Loop (PLL) para
sincronización. (b) Transformación de ABC a componentes Alpha-Beta.
(3-18)
(3-19)

27
POSvs
POSvs
vs
vs
s/50
s/50
)2/( 50fk
)2/( 50fk
s/50
s/50
Figura 2-11 Filtro de secuencia positiva dado en [8].
La ecuación escrita consiste de tres factores claramente identificables en
el diagrama de bloques en Figura 2-11. La salida del filtro en secuencia positiva
son las componentes de voltaje en Aplha-Beta en secuencia positiva: Vs
y Vs .
2.6.1.2 Medición de voltaje en secuencia negativa
Similarmente, un filtro de secuencia negativa se usa para extraer las
componentes de voltaje en Alpha-Beta, para secuencia negativa, mientras se
bloquea toda componente en secuencia positiva. El filtro está sintonizado en -50
Hz y provee en su salida, con ganancia unitaria, la componente de voltaje en
secuencia negativa: Vs y Vs .
La función de transferencia del filtro está dada por:
G (s) = ( )( )
donde
G (s) = + j
Estas tres expresiones son claramente identificables en la Figura 2-12.
Una vez que las componentes en Alpha-Beta están calculadas para ambas
secuencias, se procede a convertirlas en componentes DQ mediante una simple
transformación. Para secuencia positiva, se utiliza ω t como ángulo de
(3-20)
(3-21)

28
NEGvs
NEGvs
vs
vs
s/50
)2/( 50fk
)2/( 50fk
s/50
s/50
s/50
Figura 2-12 Filtro de secuencia negativa dado en [8].
sincronización, y para secuencia negativa se usa –ω t, tal como se muestra en
Figura 2-13.
Finalmente se obtiene las componentes en el plano DQ del voltaje en el
punto PCC, separadas para secuencia positiva y negativa. Las variables son,
Vs y Vs para control en secuencia positiva, y Vs y Vs para
secuencia negativa.
St
POSvs
POSvs
NEGvs
NEGvs
( 1)* St
POSdvs
NEGdvs
NEGqvs
POSqvs
Figura 2-13 Diagrama de bloques para Transformación de Park para (a)
Secuencia positiva, y (b) Secuencia negativa.

29
2.6.2 Unidad de medición de corriente
2.6.2.1 Medición de corriente en secuencia positiva
Este block tiene como principal función deliberar al control todas las
señales de corriente. Estas son It y It , y It y It como las
componendes de la corriente del STATCOM en plano DQ, para secuencia
positiva y negativa, respectivamente.
La corriente entrante al convertidor es medida justo antes de los
terminales de éste. La señal trifásica es llamada Istatcom. Esta señal posee tres
subseñales llamadas it , it y it . Dado que esta corriente posee ripple y
harmónicas no deseadas, se debe filtrar antes de que la señal llegue a los filtros
de secuencia especializados.
In Figura 2-14 es mostrado esquemáticamente la obtención de las
componentes en Alpha-Beta de la corriente en secuencia positiva. Utiliza, como
ya previamente explicado, una transformación ABC a Alpha-Beta, y luego un
filtro de secuencia positiva sintonizado en +50 Hz. La salida de este proceso es
It y It .
Luego de esto, y tal como se muestra en Figura 2-15, mediante una
Transformación de Park con ω t como ángulo de referencia, se obtienen las
POSit
POSit
it
it
cbaSTATCOM itititI ,,
Aitit
itBitCit
Figura 2-14 Transformación Alpha-Beta y filtro de secuencia positiva para
medición de corriente.

30
St
POSit
POSit
POSdit
POSqit
Figura 2-15 Transformación de Park para corriente secuencia positiva.
componentes de la corriente en plano DQ para secuenia positiva: It y
It respectivamente.
2.6.2.2 Medición de corriente en secuencia negativa
Para extraer la secuencia negativa, se utiliza un filtro sintonizado en -50
Hz. Éste deja pasar solo la componente negativa a frecuencia fundamental,
mientras que bloquea toda componente en secuencia positiva.
En este caso, como se muestra en Figura 2-16, se filtra las componentes
trifásicas de la corriente it , it y it mediante un simple pasabajo sintonizado
cercano a 50 Hz. Este filtro remueve el ripple y las armónicas presentes en las
componentes instantáneas de la corriente medida. Una vez filtradas las señales,
están pasan a una transformación ABC a Alpha-Beta. Al final de esta
transformación las señales son denominadas It y It . El término
“Uncomp” es debido a que aun no se ha compensado el efecto del filtro
pasabajo.
La compensación es realizada tanto en fase como en magnitud, aplicando
ciertas constantes de multiplicación a las componentes Alpha-Beta de la
corriente.
It = It ∗ K + It ∗ K ∗ K
It = −It ∗ K + It ∗ K ∗ K
donde It y It son las componentes Alpha-Beta
respectivamente, utilizada solo para el filtro de secuencia negativa, mientras ke
(3-22)
(3-23)

31
cbaSTATCOM itititI ,,
AitUncompit
Uncompit
BitCit
Uncompit
Uncompit
1k
3k
2k
Uncompit
Uncompit 1k3k
2k
Compit
Compit
Figura 2-16 Filtro pasabajo y Transformación Alpha-Beta, y compensación de
filtro para corriente en secuencia negativa.
K , K y K son constantes calculadas previamente, dependiendo de la
sintonización del filtro pasabajo. Este método de compensación después de la
transformación está explicado en [6]. El diagrama se muestra en Figura 2-16
Una vez compensado el electo del filtro, las señales resultantes pasan al filtro de
secuencia negativa, mostrado esquemáticamente en Figura 2-17, donde se
obtiene It y It , componentes Alpha-Beta de la corriente en secuencia
negativa. Finalmente, mediante Transformación de Park, y usando –ω t como
ángulo de sincronización se obtiene It y It como las componentes de
la corriente e plano DQ, en secuencia negativa.
Resumiendo, la unidad de medición de corriente procesa la información
proveniente de los medidores de corriente en los terminales del convertidor, y
entrega al sistema de control las variables necesarias, en plano DQ, para
secuencia positiva y negativa. Estas son: It y It para secuencia
positiva, en plano DQ; y It y It para secuencia negativa en plano DQ,

32
NEGit
NEGit
Compit
Compit
( 1)* St
NEGit
NEGit
NEGdit
NEGqit
Figura 2-17 Filtraje de corriente en secuencia negativa y transformación de Park
asociada.
respectivamente.
2.7 GENERADOR DE SEÑALES MODULADORAS
Volviendo al control, una vez que las componentes de voltaje de salida del
convertidor están calculadas por los controladores de corriente en ambas
secuencias (ver puntos 2.4 y 2.5), éstas tienen que ser limitadas dentro de su
rango de operación. La limitación de voltaje en las válvulas y en el capacitor
define el rango de operación en secuencia positiva; mientras que las
oscilaciones de voltaje que el DC-Link pueda soportar, definirá el rango de
operación en secuencia negativa.
2.7.1 Voltaje de referencia de salida en secuencia positiva
El vector de voltaje en secuencia positiva denotado como vt y
vt y debe ser limitado a 39.6 kV (cercano a 1.1 pu). Las siguientes
operaciones matemáticas vistas en [1] fueron implementadas:
Vt = (vt ) + vt
restringiendo de la siguiente forma:
Vt ≤ 39.5 [kV] ∧ vt ≠ 0 [kV]
(3-24)
(3-25)

33
donde Vt es la magnitud del vector de Park que respresenta el voltaje terminal
del convertidor en secuencia positiva. Los valores se reajustan de la siguiente
forma:
vt = Vt ∗ cos tan
vt = Vt ∗ sin tan
donde vt y vt son los valores ajustados del voltaje terminal, en
secuencia positiva.
Una transformación inversa de Park con ω t como ángulo se utiliza para
obtener los voltajes en componentes de fase. Finalmente, los voltajes son
normalizados entre [-1,1] utilizando los límites establecidos y el voltaje DC
utilizado. Para los dos tipologías de convertidores utilizados, los voltajes peak se
expresan en la siguiente igualdad:
Vpeak = 2/Vdc
Vpeak = √3/Vdc
La salida de este proceso son las señales moduladoras representantes
del voltaje trifase en secuencia positiva de la salida del convertidor: vt ref,
vt ref, y vt ref, usadas en la modulación PWM. Parte de este proceso
se aprecia esquemáticamente en Figura 2-18.
2.7.2 Voltaje de referencia de salida en secuencia negativa
Similar al caso anterior, el vector de Park que representa el voltaje
terminal, pero en secuencia negativa, está denotado como vt y vt y
debe ser limitado a 14.4 kv (cercano a 0,4 pu). El proceso matemático se
describe a continuación:
Vt = (vt ) + vt
donde Vt es la magnitud del vector de Park que representa el voltaje de salida
en secuencia negativa. Este voltaje se restringe de la siquiente forma, definiendo
nuevas variables:
(3-26)
(3-27)
(3-27)
(3-28)
(3-29)

34
Vt = Vt ∧ Vt ≤ 14.4 [kV]
Vt = Vt ∧ Vt ≠ 0 [kV]
donde, Vt y Vt son variables auxiliarías para implementar la operación. La
proporción entre Vt vs. Vt es definida como:
ratio =
Los voltajes entonces, se ajustan mediante la siguiente ecuación:
vt = vt ∗ ratio
vt = vt ∗ ratio
donde vt y vt son los valores ajustados del vector de Park, para el
voltaje de salida en secuencia negativa.
Con una transformación de Park inversa usando −ω t como ángulo de
giro, se pueden obtener las componentes de fase del voltaje de salida, en
secuencia negativa. Al normalizar estos voltajes en función del voltaje DC [6], las
variables son llamads: vt ref, vt ref, y vt .
Las componentes de voltaje totales, ya limitadas y normalizadas, se suman para
obtener las señales modulantes. Estas son:
vt = vt ref + vt ref
vt = vt ref + vt ref
vt = vt ref + vt ref
UnldVt
UnlqVt
UnldVt
UnlqVt
S t
POSdVt
POSqVt
NEGdVt
NEGqVt
refAvt
refBvt
refCvt
refvt POSA
refvt POSB
refvt POSC
refvt NEGA
refvt NEGB
refvt NEGC
( 1) * S t
refVDC
Figura 2-18 Esquema para el generador de señales modulantes.
(3-30)
(3-31)
(3-32)
(3-33)
(3-34)
(3-34)
(3-35)
(3-36)

35
Finalmente, vt , vt y vt son usadas para generar señales de
switching. Los procesos de adaptación de las señales están ejemplificados en la
Figura 2-18.
2.8 PWM Y SEÑALES DE GATE
Esta sección provee diferentes tipos de switching que se puede usar en un
STATCOM. El convertidor utilizado es un VSI (Voltage Source Inverter), de dos
niveles y de tres niveles. Para el convertidor en dos niveles, se utiliza SPWM
(Sine Pulse Width Modulation), mientras que para el convertidor en tres niveles
(Three-Level NPC VSI) se utiliza SFO-PWM (Swichting Frequency Optimal
PWM).Cada tipología es estudiada en detalle.
2.8.1 Sinusoidal Pulse Width Modulation para STATCOM basado en convertidor
de dos niveles
El convertidor de dos niveles es la tipología más sencilla para producir un
voltaje trifásico desde una fuente DC [2], [4]. La técnica de modulación se llama
Sinusoidal Pulse Width Modulation.
La salida de cada terminal, mostrado en Figura 2-19 es una onda cuadrada con
dos posibles valores: V /2 o −V /2. El puente consiste en seis válvulas GTO
que conectan cada fase con un terminal del capacitor DC. La dirección de la
corriente determinará si conducirá el GTO o el diodo anti-paralelo.
Cavtbvtcvt
Vc DCV
2/DCV
2/DCV Figura 2-19 Convertidor de dos niveles y forma de onda de salida, dadas en [4].

36
refAvt
2
t
3
32
34
35
Figura 2-20 Voltaje de referencia para la fase A, usando SPWM.
Las señales de gate son generadas mediante la comparación entre una
función seno (voltaje de salida normalizada, como moduladora) y una función
triangular (como portadora), mostrado en Figura 2-20.
Una implementación esquemática de la generación de señales de
switching es mostrada en Figura 2-21 Las señales con comparadas, y la salida
es “0” cuando el voltaje es menor que la triangular, y “1” cuando es mayor. La
señal es conectada en el gate G1, mientras que su negación es conectada en
G4 (ver Figura 2-19).
La onda moduladora no excede el valor peak de la onda triangular dado
que es limitado y normalizado. El índice de modulación no excede la unidad,
refAvt t
t Figura 2-21 Generador de señales de switching usando SPWM para convertidor
de dos niveles.

37
por ende, el voltaje peak realizable en la salida para la componente fundamental
es [3]:
max vt , =
PSCAD provee herramientas especificas para crear las señales de gate
para un convertidor, pero incluye otras funciones como señal de bloqueo, gate
interpolados entre timesteps, y otras propiedades. Aunque se vea algo más
complejo, el principio de comparación entre portante y moduladora es el mismo.
2.8.2 Switching Frequency Optimal Pulse Width Modulation for three-level VSI
based STATCOM
El convertidor de tres niveles, llamado “three-level neutral poin clamped
voltage supply inverter” o three-level NPC VSI es mostrado en Figura 2-22. Las
fases pueden ser moduladas entre tres niveles, en vez de dos [4]. Estos son
V /2 , −V /2 y cero. La técnica de modulación utilizada es una mezcla entre
Switching Frequency Optimal Pulse Width Modulation (SFO-PWM) explicado en
2C
avtbvtcvt
1C1Vc
2Vc
DCV
2/DCV
2/DCV
oi
Figura 2-22 Esquema para un convertidor de tres niveles NPC y forma de onda
de salida, dada en [4].
(3-37)
38
[13] y una técnica de balance de voltaje DC explicado en [9] y [10], donde dos
señales moduladoras y dos portadoras coexisten para una misma fase. En el
convertidor de tres niveles, el DC-Link está dividido en dos voltajes separados
por un punto medio, mostrado en Figura 2-22. Los voltajes en los capacitores
deben estar siempre iguales, y esto se logra mediante la aplicación de una
técnica SFO-PWM modificada.
Considerando la Figura 2-22, para modular la fase A entre cero y V /2,
el switch G1A es conmutado, mientras que G3A es conmutado inversamente, al
mismo tiempo que el switch G2A está siempre en conducción y el switch G4A
está bloqueado. Similarmente, para modular entre cero y −V /2, el switch G4A
conmuta mientras que el switch G2A conmuta inversamente, el switch G3A está
en conducción y G1A está siempre bloqueado.
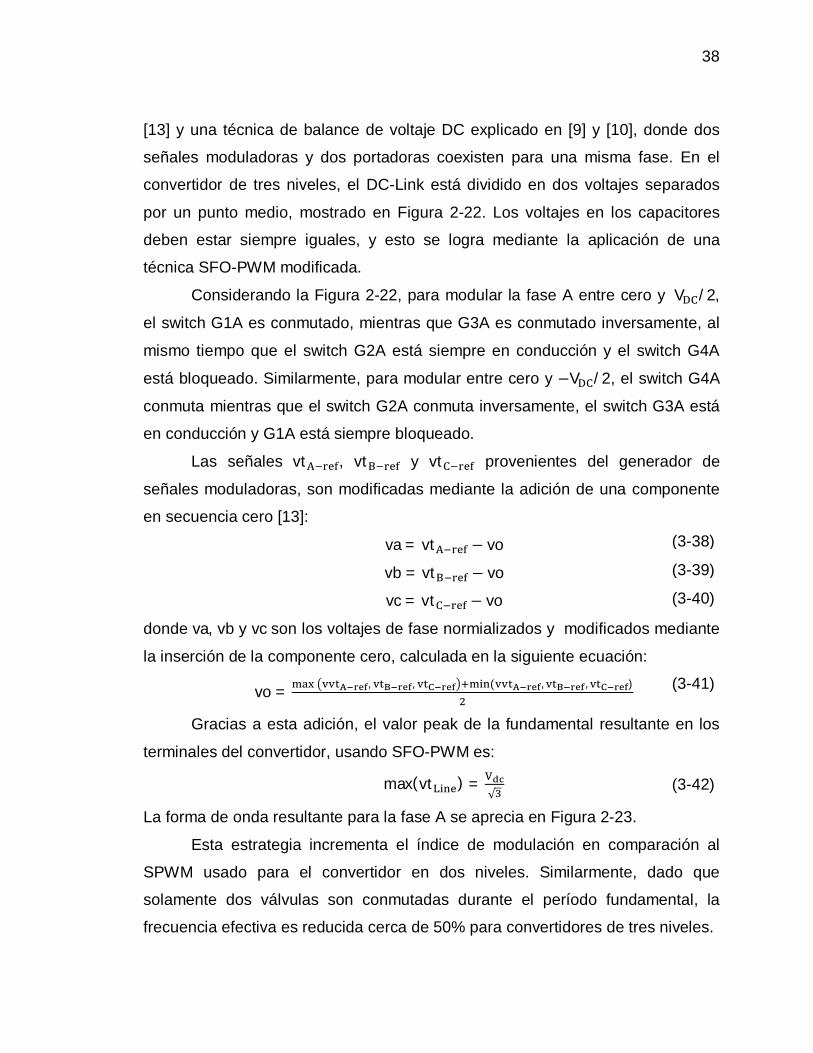
Las señales vt , vt y vt provenientes del generador de
señales moduladoras, son modificadas mediante la adición de una componente
en secuencia cero [13]:
va = vt − vo
vb = vt − vo
vc = vt − vo
donde va, vb y vc son los voltajes de fase normializados y modificados mediante
la inserción de la componente cero, calculada en la siguiente ecuación:
vo = , , ( , , )
Gracias a esta adición, el valor peak de la fundamental resultante en los
terminales del convertidor, usando SFO-PWM es:
max(vt ) =√
La forma de onda resultante para la fase A se aprecia en Figura 2-23.
Esta estrategia incrementa el índice de modulación en comparación al
SPWM usado para el convertidor en dos niveles. Similarmente, dado que
solamente dos válvulas son conmutadas durante el período fundamental, la
frecuencia efectiva es reducida cerca de 50% para convertidores de tres niveles.
(3-38)
(3-39)
(3-40)
(3-41)
(3-42)
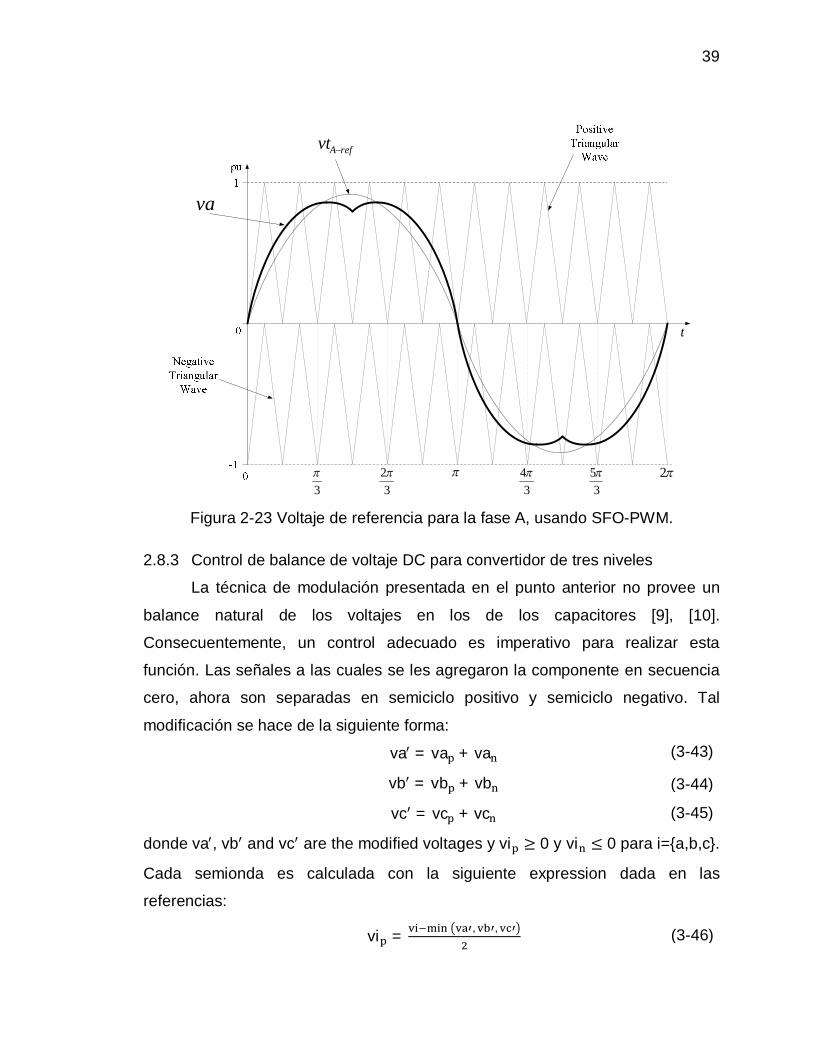
39
refAvt
2
t
3
32
34
35
va
Figura 2-23 Voltaje de referencia para la fase A, usando SFO-PWM.
2.8.3 Control de balance de voltaje DC para convertidor de tres niveles
La técnica de modulación presentada en el punto anterior no provee un
balance natural de los voltajes en los de los capacitores [9], [10].
Consecuentemente, un control adecuado es imperativo para realizar esta
función. Las señales a las cuales se les agregaron la componente en secuencia
cero, ahora son separadas en semiciclo positivo y semiciclo negativo. Tal
modificación se hace de la siguiente forma:
va = va + va
vb = vb + vb
vc = vc + vc
donde va , vb and vc are the modified voltages y vi ≥ 0 y vi ≤ 0 para i=a,b,c.
Cada semionda es calculada con la siguiente expression dada en las
referencias:
vi = , ,
(3-43)
(3-44)
(3-45)
(3-46)
40
vi = , ,
con i = a, b, c.
Las señales con el subíndice “n” corresponden a las puramente negativas,
mientras que las que tiene el subíndice “p” son puramente positivas. Al
separarlas de esta forma, es posible lograr una corriente neutral i = 0, como
está demostrado en [9] y [10]. La Figura 2-24 muestra la implementación de esta
nueva forma de onda.
Cuando el voltaje está desbalanceado, es necesario realizar i ≠ 0. Esto
se hace mediante la adición de un offset cuando ambas señales (positiva y
negativa) son distintas de cero. Esto es solo durante los intervalos π/3 ≤ ωt ≤
2π/3 y 4π/3 ≤ ωt ≤ 5π/3 del período eléctrico, vistas las formas de onda en
Figura 2-24.
El offset en cuestión se calcula de la siguiente forma:
vi = k ∗ Δv ∗ sign(ω t) ∗ f(ω t)
donde Δv = v − v , con v y v son los voltajes medidos y filtrados en
ambos capacitores, k es la constante de amplificación del error, ω t es el ángulo
de giro de la fase “i” con i=a,b,c obtenida de un PLL dedicado. La función “sign”
es quien provee el signo del offset dependiendo del signo del error en el voltaje
DC, mientras que la función “f” provee el tiempo exacto en cual la señal debe ser
agregada las señales moduladoras.
En general k es bajo, y la señal que se agrega debe estar entre [-1,1],
por ende, se usa un limitador a la salida del control proporcional. El error en el
voltaje de los capacitores es alrededor de 10 a 25 kVdc sin el control de balance.
Al implementar este balance, el error disminuye a 0.5 a 3 kVdc lo cual es
aceptable.
El offset es agregado directamente a la señal moduladora de la siguiente
forma:
(3-47)
(3-48)

41
2
t
3
32
34
35
pva
nva
Figura 2-24 Voltaje de referencia para la fase A, modificado para balance de
voltaje dc.
va = va + va
vb = vb + vb
vc = vc + vc
donde va , vb′ y vc son las señales moduladoras, incluido SFO-PWM y
balance de voltaje DC. Finalmente, las señales de gating son producidas usando
el circuito mostrado en Figura 2-25, para las formas de onda vistas en Figura 2-
24
La señal interA es la intersección temporal entre va′ y va′ . Esta señal es
“1” cuando ambas señales moduladoras son distintas de cero (esto es durante
los intervalos π/3 ≤ ωt ≤ 2π/3 y 4π/3 ≤ ωt ≤ 5π/3, de la Figura 2-24); y es “0”
cuando una de las señales es cero (0 ≤ ωt ≤ 1π/3, 3π/3 ≤ ωt ≤ 4π/3, y
5π/3 ≤ ωt ≤ 2π, en la misma figura).
La señal de gate G1A es generada por la comparación instantánea entre
va′ y trg . Similarmente, la señal de gate G4A es generada usando va′
(3-50)
(3-51)
(3-49)

42
pva
pva
nva
pva
nva
nva
Figura 2-25 Generador de señales de switching usando SFO-PWM modificada, para convertidor de tres niveles NPC.
and trg . Estas señales son “1” o “on” cuando el valor absoluto de la semionda
excede la triangular, y “0” o “off” cuando ocurre lo contrario.
Durante los intervalos va′ > 0 and interA = 0, G2A es siempre “1”, G4A
es “0”, G1A conmuta y G3A conmuta inversamente a G1A. En forma similar,
durante los intervalos donde va′ < 0 y interA = 0, G3A es en “1”, G1A es “0”,

43
G4A conmuta y G2A conmuta inversamente a G4A.
Cuando interA es “1”, o en otras palabras, cuando va′ y va′ coexisten,
G2A es conmutado con la negación de G4A y G3A es conmutado por la
negación de G1A.
2.9 MODELADO DEL SISTEMA DE TRANSMISIÓN
Un sistema de transmisión completo se modeló en PSCAD. La red consiste
en dos subsistemas principales, como es mostrado en Figura 2-26. Un sistema
es en 220 kV (en verde) que inluye otros sistemas más pequeños, cargas y el
STATCOM, y el otro en 500 kV (en azul) el cual integra compensación en serie y
paralelo.
Figura 2-26 Esquema del sistema de transmisión.

44
Además, se incluyeron parámetros para secuencia positive y secuencia cero en
cada línea. Cargas y compensaciones, así como también sus valores de voltaje y
fase para sus circuitos equivalentes, para condición débil y fuerte del sistema.
2.9.1 Fuentes equivalentes
Los sistemas equivalentes son modelados por una fuente a.c. detrás de
impedancias variables que representan el sistema en condición fuerte y
condición débil. Este tipo de configuración es mostrada en la Figura 2-27. Al
cerrar el interruptor S , es posible pasar de fuerte a débil y viceversa. El voltaje y
el ángulo de la fuente de tensión también están especificado para ámbas
condiciones.
111 SSS VV
StrongX StrongR addX addR
1S
Figura 2-27 Sistema equivalente para condición fuerte y débil del sistema.
Tabla 2-1 Parámetros de las fuentes equivalentes.
Ancoa 550 [kV]
Quillota 220 [kV]
Strong Network
S 7377 MVA 7108 MVA V 533.66 kV 230.83 kV ∅ 16.65º 6.67º R 6.764 Ω 1.385 Ω L 113 mH 2.23 mH
Weak Network
S 5913 MVA 6098 MVA
V 539.44 kV 229.48 kV ∅ 27.47º 25.37º R 1.710 Ω 0.104 Ω L 29.55 mH 3.613 mH

45
La frecuencia nominal es 50 Hz. Los datos para V, R y L están en la Tabla
2-1, donde R = R − R y Z = Z − Z . Se usa una fuente de
tensión trifñasica ideal, dado que no hay involucrados estudios del
comportamiento electromecánico del sistema.
2.9.2 Transformadores
Los parámetros de los transformadores están resumidos en la Tabla 2-2.
Tabla 2-2 Datos de los transformadores.
Data Cerro Navia STATCOM Polpaico Alto Jahuel
(equivalent) Cerro Navia
3-windiing Jeumont Cerro Navia
3-windiing Hyunday
Voltages 36/220 kV 220/500 kV 220/500 kV 13.2/110/220 kV 13.2/110/220 kV
Transformer Rating 140 MVA 750 MVA 1500 MVA 375/375/150 MVA 400/400/120 MVA
Transformer Impedance 12 % 14.82 % 14.68 %
HV-MV: 12.56 % MV-LV: 8.517 % LV-HV: 13.821 %
HV-MV: 11.29 % MV-LV: 6 %
LV-HV: 9.92 %
Saturation knee voltage 1.30 pu 1.17 pu 1.17 pu --- ---
Inrush decay Time constant 1.38 s --- --- --- ---
Magnetization Current 0.11 % 0.11 % 0 % 0 % 0 %
Air Core Inductance 0.11 pu 0.2 pu 0.2 pu --- ---
2.9.3 Líneas de Transmisión y compensación serie-paralelo
Las líneas de transmisión son modeladas en PSCAD usando la
información de la Tabla 2-3. En el esquema de la Figura 2-26 existe
compensación serie, paralelo y bancos de capacitores. En la Figura 2-28 se
muestra como se implementa los distintos interruptores para comandar la
conexión de la compensación cuando se requiera.
Para conectar el capacitor serie entre la línea y el bus para sistema
fuerte, basta con abrir el interruptor S . Para conectar la compensación shunt en
sistema débil se debe cerrar el interruptor S . Para conectar el banco de
capacitores en sistema fuerte, se cierra el interruptor S .
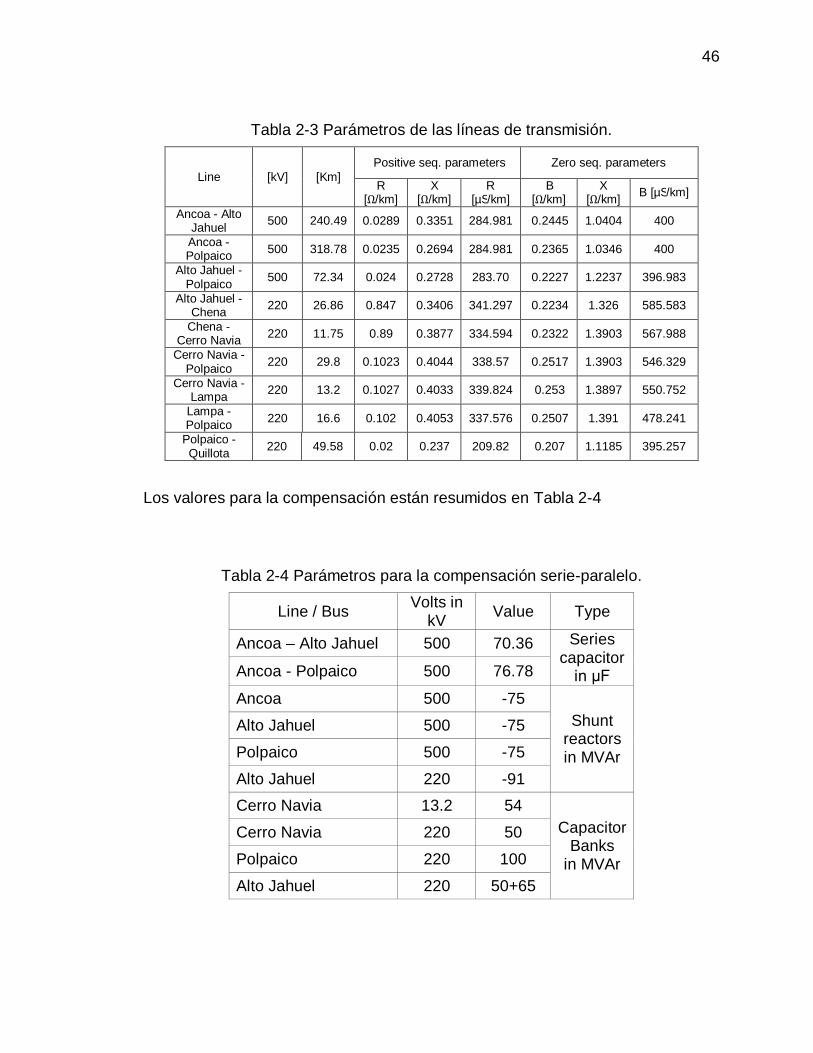
46
Tabla 2-3 Parámetros de las líneas de transmisión.
Line [kV] [Km] Positive seq. parameters Zero seq. parameters
R [Ω/km]
X [Ω/km]
R [µS/km]
B [Ω/km]
X [Ω/km] B [µS/km]
Ancoa - Alto Jahuel 500 240.49 0.0289 0.3351 284.981 0.2445 1.0404 400
Ancoa - Polpaico 500 318.78 0.0235 0.2694 284.981 0.2365 1.0346 400
Alto Jahuel - Polpaico 500 72.34 0.024 0.2728 283.70 0.2227 1.2237 396.983
Alto Jahuel - Chena 220 26.86 0.847 0.3406 341.297 0.2234 1.326 585.583
Chena - Cerro Navia 220 11.75 0.89 0.3877 334.594 0.2322 1.3903 567.988
Cerro Navia - Polpaico 220 29.8 0.1023 0.4044 338.57 0.2517 1.3903 546.329
Cerro Navia - Lampa 220 13.2 0.1027 0.4033 339.824 0.253 1.3897 550.752
Lampa - Polpaico 220 16.6 0.102 0.4053 337.576 0.2507 1.391 478.241
Polpaico - Quillota 220 49.58 0.02 0.237 209.82 0.207 1.1185 395.257
Los valores para la compensación están resumidos en Tabla 2-4
Tabla 2-4 Parámetros para la compensación serie-paralelo.
Line / Bus Volts in kV Value Type
Ancoa – Alto Jahuel 500 70.36 Series capacitor
in µF Ancoa - Polpaico 500 76.78
Ancoa 500 -75 Shunt
reactors in MVAr
Alto Jahuel 500 -75
Polpaico 500 -75
Alto Jahuel 220 -91 Cerro Navia 13.2 54
Capacitor Banks
in MVAr
Cerro Navia 220 50
Polpaico 220 100
Alto Jahuel 220 50+65
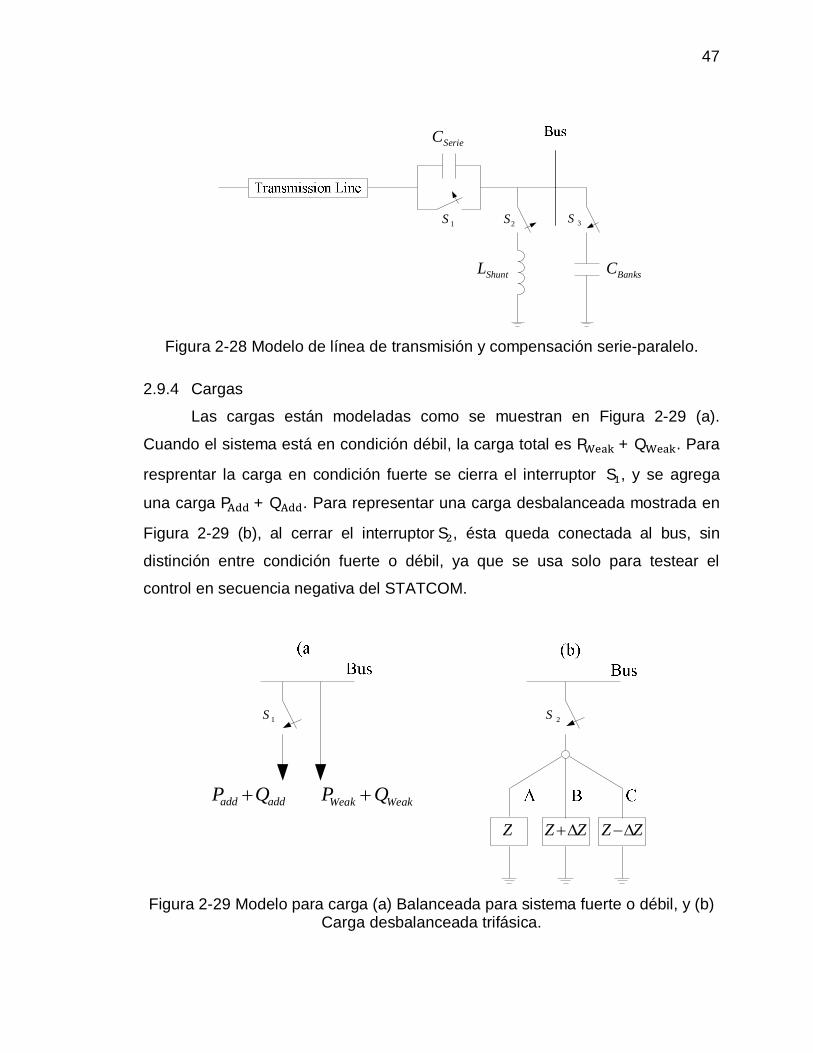
47
SerieC
ShuntL BanksC
1S 2S 3S
Figura 2-28 Modelo de línea de transmisión y compensación serie-paralelo.
2.9.4 Cargas
Las cargas están modeladas como se muestran en Figura 2-29 (a).
Cuando el sistema está en condición débil, la carga total es P + Q . Para
resprentar la carga en condición fuerte se cierra el interruptor S , y se agrega
una carga P + Q . Para representar una carga desbalanceada mostrada en
Figura 2-29 (b), al cerrar el interruptor S , ésta queda conectada al bus, sin
distinción entre condición fuerte o débil, ya que se usa solo para testear el
control en secuencia negativa del STATCOM.
WeakWeak QP addadd QP
Z ZZ ZZ
1S 2S
Figura 2-29 Modelo para carga (a) Balanceada para sistema fuerte o débil, y (b)
Carga desbalanceada trifásica.

48
Tabla 2-5 Parámetros de las cargas.
Bus P in MVA Q in MVA P in MVAr Q in MVAr Cerro Navia 110
kV 157,14 46,32 246,86 104,68
Alto Jahuel 220 kV 213 -67 197 193 Chena 220 kV 88 -15,96 202 187,96
Lampa 220 kV 33,25 1,83 -14,25 -1,2 Polpaico 220 kV 92,8 28,55 7,51 3,87
Los parámetros de las cargas están resumidas en la Tabla 2-5, donde
P = P − P y Q = Q − Q . En un sistema de transmisión, los
parámetros de Z para la carga desbalanceada son usualmente altos, al mismo
tiempo que su desbalance es pequeño ∆Z.
2.10 MODELO COMPLETO
El modelo mostrado en Figura 2-26 consiste en:
Siete buses: Quillota, Polpaico, Lampa, Cerro Navia, Chena, Alto Jahuel y
Ancoa.
Dos fuentes: equivalente del norte conectado en Quillota y equivalente del
sur conectado a Ancoa.
1 STATCOM conectado en Cerro Navia, sin filtros incluidos.
Nueve líneas de transmisión
Cinco transformadores
Dos compensaciones en serie.
Siete compensaciones en paralelo.
Seis bancos de capacitores.
El STATCOM está conectado en la barra llamada “STATCOM46kV bus”, el
cual está conectada a Cerro Navia 220 kV bus mediante un transformador de
220/36 kV 140 MVA.

CAPÍTULO 3
3 SIMULACIÓN Y RESULTADOS
3.1 INTRODUCCIÓN
Este capítulo provee la validación de los controles explicados en el capítulo
3 vía simulación en PSCAD. Ambos convertidores en dos y tres niveles son
verificados, solo el convertidor en tres niveles es usado para simular
contingencias, utilizando sólo el sistema en condición débil. Se agrega también
las simulaciones sin uso del STATCOM (cero MVAr de salida) para comparar los
efectos de su uso.
3.2 CONFIGURACIÓN DE CONTROLADORES PI Y FILTROS
La estrategia de control para ambas tipologías de convertidor son las
mismas. La diferencia radica en la estructura del hardware y el control de éste.
En relación a la configuración de los controladores PI y los filtros utilizados, se
realizó la siguiente metodología:
1. Las ganancias y las frecuencias de corte de los filtros en las unidades de
medición de voltaje y corriente son definidas en un principio.
2. Para los controladores PI, es importante definir ganancias bajas y
constantes de tiempo largas en un principio. Todas las referencias de
corriente son cero.
3. En el control de corriente en secuencia positiva, se aplican steps en la
referencia de corriente en el eje Q, mientras el eje D está en cero. Los
valores se copian para el contro de corriente en secuencia negativa.
4. Se aplica un escalón de entrada en la referencia del voltaje DC y al control
de voltaje RMS.
5. El control para balance de voltaje de fase en el control de secuencia
negativa lleva valores aproximadamente iguales al control de voltaje RMS,
pero se verificará al momento de usar una carga desbalanceada.
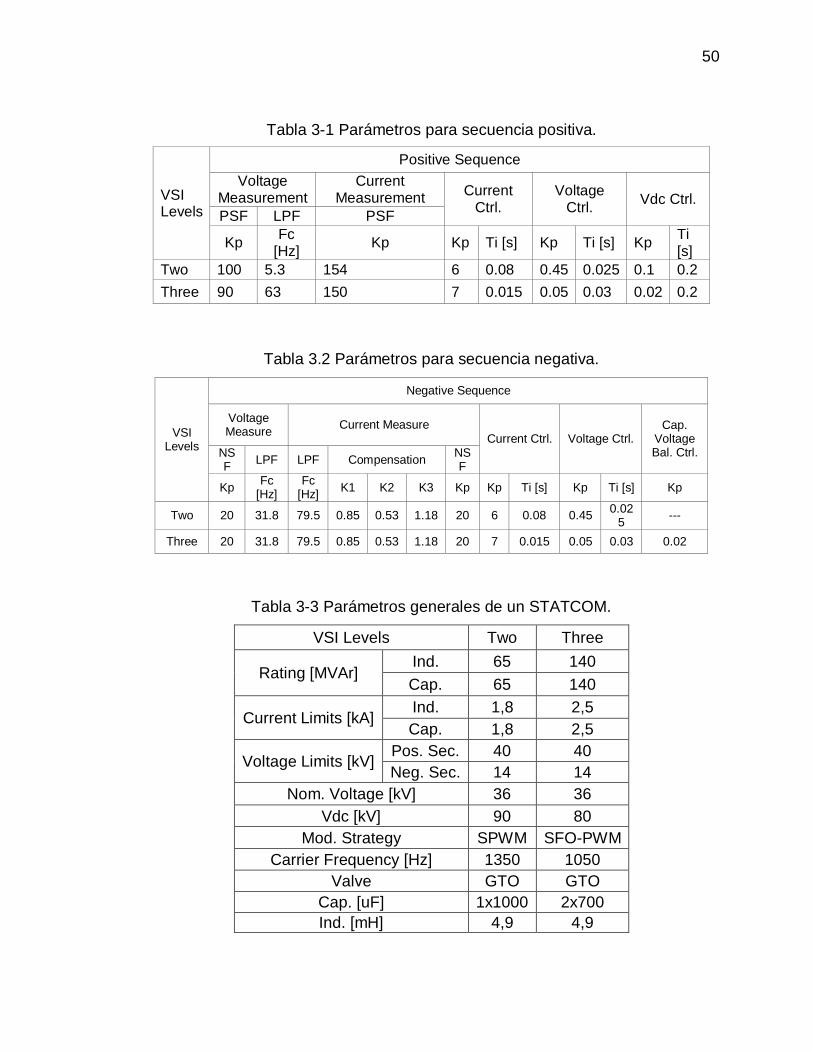
50
Tabla 3-1 Parámetros para secuencia positiva.
VSI Levels
Positive Sequence Voltage
Measurement Current
Measurement Current Ctrl.
Voltage Ctrl. Vdc Ctrl.
PSF LPF PSF
Kp Fc [Hz] Kp Kp Ti [s] Kp Ti [s] Kp Ti
[s] Two 100 5.3 154 6 0.08 0.45 0.025 0.1 0.2 Three 90 63 150 7 0.015 0.05 0.03 0.02 0.2
Tabla 3.2 Parámetros para secuencia negativa.
VSI Levels
Negative Sequence
Voltage Measure Current Measure
Current Ctrl. Voltage Ctrl. Cap.
Voltage Bal. Ctrl. NS
F LPF LPF Compensation NSF
Kp Fc [Hz]
Fc [Hz] K1 K2 K3 Kp Kp Ti [s] Kp Ti [s] Kp
Two 20 31.8 79.5 0.85 0.53 1.18 20 6 0.08 0.45 0.025 ---
Three 20 31.8 79.5 0.85 0.53 1.18 20 7 0.015 0.05 0.03 0.02
Tabla 3-3 Parámetros generales de un STATCOM.
VSI Levels Two Three
Rating [MVAr] Ind. 65 140 Cap. 65 140
Current Limits [kA] Ind. 1,8 2,5 Cap. 1,8 2,5
Voltage Limits [kV] Pos. Sec. 40 40 Neg. Sec. 14 14
Nom. Voltage [kV] 36 36 Vdc [kV] 90 80
Mod. Strategy SPWM SFO-PWM Carrier Frequency [Hz] 1350 1050
Valve GTO GTO Cap. [uF] 1x1000 2x700 Ind. [mH] 4,9 4,9

51
En la Tabla 4.1 y Tabla 4.2 están expuestos los valores para los controles
PI y filtros usados en ambas tipologías, separadas en secuencia positiva y
negativa respectivamente.
En tabla Tabla 3-3 están agrupados los valores para los diferentes
controles, filtros y dispositivos usados en ambas tipologías.
En los puntos 3.3 y 3.4 están testeadas ambas tipologías de convertidor,
respectivamente. Desde el punto 3.5 en adelante, solo el convertidor en tres
niveles es usado, y solo para sistema en condición débil.
3.3 TEST DE CONTROLES PARA EL STATCOM EN DOS NIVELES
3.3.1 Control de corriente
La respuesta al escalón a la corriente reactiva It se obtiene al aplicar
un escalón a su referencia It ref. La referencia cambia de 0 kA a 1.5 kA en t
= 0.5 s, para condición fuerte y débil.
Figura 3-1 STATCOM en dos niveles: Respuesta escalón de la componente reactiva de la corriente en secuencia positiva para sistema (a) Débil, y (b) Fuerte.
Time [s] 0.480 0.500 0.520 0.540 0.560
-0.50
0.00
0.50
1.00
1.50
2.00
2.50
Cur
rent
[kA]
Itq_pos_REF Itq_pos
Time [s] 0.480 0.500 0.520 0.540 0.560
-0.50
0.00
0.50
1.00
1.50
2.00
2.50
Cur
rent
[kA]
Itq_pos_REF Itq_pos
(a)
(b)

52
Ambas respuestas son similares. El STATCOM puede seguir un cambio
en su referencia en menos de 20 ms, y con un overshoot del 17 % máximo,
considerando ambas condiciones del sistema. Una pequeña oscilación aparece
debido a la variación del voltaje DC, pero desaparece casi inmediatamente. El
riple visto en las señales es debido al uso filtro de secuencia positiva solamente.
3.3.2 Control del voltaje DC
En este punto se presenta la respuesta a escalón del voltaje en el DC-
Link. La señal escalonada es V ref y se estudiará la respuesta del voltaje
medido V . La referencia cambia desde 86 kV a 90 kV en t = 0.5 s, para ambas
condiciones del sistema.
El voltaje en el DC-Link varia lentamente debido a que se tiene que cargar
el capacitor por la acción del control en potencia activa. Un pequeño overshoot
es apreciado, con un tiempo de asentamiento de 100 ms.
3.3.3 Control de voltaje RMS
En este punto se testea la respuesta escalón de la referencia del control
Figura 3-2 STATCOM en dos niveles: Respuesta escalón del voltaje DC, para
sistema (a) Débil, y (b) Fuerte.
Time [s] 0.40 0.50 0.60 0.70 0.80 0.90 1.00
85.0
86.0
87.0
88.0
89.0
90.0
91.0
92.0
d.c.
Vol
tage
[kV]
Vdc_ref Vdc
Time [s] 0.40 0.50 0.60 0.70 0.80 0.90 1.00
85.0
86.0
87.0
88.0
89.0
90.0
91.0
92.0
d.c.
Vol
tage
[kV
]
Vdc_ref Vdc
(a)
(b)

53
Figura 3-3 STATCOM en dos niveles: Respuesta escalón del voltaje RMS, para
sistema (a) Débil, y (b) Fuerte.
del voltaje RMS en el punto PCC, Vs . Su referencia Vs ref es cambiada de
1.0 pu a 1.05 pu en t = 0.5 s, para ambas condiciones del sistema.
Figura 3-4 STATCOM en dos niveles: Ejemplo de formas de onda de (a) Voltaje
de línea, y (b) Corriente.
Time [s] 0.450 0.475 0.500 0.525 0.550 0.575 0.600 0.625 0.650 0.675 0.700
0.980
1.000
1.020
1.040
1.060
1.080
Bus
Volta
ge V
s [p
u]
Vs_rms_REF Vsd_pos
Time [s] 0.450 0.475 0.500 0.525 0.550 0.575 0.600 0.625 0.650 0.675 0.700
0.980
1.000
1.020
1.040
1.060
1.080
Bus
Volta
ge V
s [p
u]
Vs_rms_REF Vsd_pos
Time [s] 1.000 1.010 1.020 1.030 1.040 1.050
-150
-100
-50
0
50
100
150
Volta
ge [k
V]
Vtab
Time [s] 1.000 1.010 1.020 1.030 1.040 1.050
-3.0
-2.0
-1.0
0.0
1.0
2.0
3.0
Cur
rent
[kA]
Ita
(a)
(b)
(a)
(b)

54
El control de voltaje rmn realiza un cambio de tensión en un tiempo de
asentamiento de 100 ms, tiempo de subida de 25 ms y un overshoot del 10%.
Las formas de onda de la tensión RMS es mostrada en la Figura 3-3. En Figura
3-4 se muestra un ejemplo de las formas de onda de la tensión y corriente
instantánea de un convertidor de dos niveles.
De esta forma, el STATCOM con convertidor de dos niveles queda
validado, al menos su estrategia de control de las variables más importantes.
3.4 TEST DE CONTROLES PARA EL STATCOM EN DOS NIVELES
3.4.1 Control de corriente
La respuesta al escalón a la corriente reactiva It se obtiene al aplicar
un escalón a su referencia It ref. La referencia cambia de 0 kA a 1.5 kA en t
= 0.5 s, para condición fuerte y débil.
Prácticamente no existe distinción entre diferentes condiciones del
sistema. Existe un overshoot del 22% y un tiempo de asentamiento de 20 ms.
Figura 3-5 STATCOM en tres niveles: Respuesta escalón de la componente
reactiva de la corriente en secuencia positiva para sistema (a) Débil, y (b) Fuerte.
Time [s] 0.480 0.500 0.520 0.540 0.560 0.580
-0.50
0.00
0.50
1.00
1.50
2.00
2.50
Cur
rent
[kA]
Itq_pos_REF Itq_pos
Time [s] 0.480 0.500 0.520 0.540 0.560 0.580
-0.50
0.00
0.50
1.00
1.50
2.00
2.50
Cur
rent
[kA]
Itq_pos_REF Itq_pos
(b)
(a)

55
Nuevamente, debido a las componentes acopladas del control, existe una
pequeña oscilación en el voltaje DC, que desaparece después de 100 ms.
3.4.2 Control del voltaje DC
En este punto se presenta la respuesta a escalón del voltaje en el DC-
Link. La señal escalonada es V ref y se estudiará la respuesta del voltaje
medido V . La referencia cambia desde 76 kV a 80 kV en t = 0.6 s, para ambas
condiciones del sistema.
El voltaje en el DC-Link en general tiene una dinámica lenta con respecto
al resto del sistema. En este caso, y tal como se muestra en Figura 3-6, la
respuesta es algo más lenta que en el STATCOM de dos niveles. Existe un
tiempo de asentamiento de 200 ms con un tiempo de subida de 2 a 2.5 ciclos
fundamentales ante la respuesta escalón, y casi no existe overshoot. Es de notar
que ambos voltajes de los capacitores están controlados y balanceados entorno
a los 40 kV. Esto voltajes Vc y Vc están superpuestos, incluso durante el
transiente y luego de éste.
Figura 3-6 STATCOM en tres niveles: Respuesta escalón del voltaje DC, para
sistema (a) Débil, y (b) Fuerte.
Time [s] 0.500 0.550 0.600 0.650 0.700 0.750 0.800
30
40
50
60
70
80
90
d.c.
Vol
tage
[kV]
Vdc_ref Vdc V_c1 V_c2
Time [s] 0.500 0.550 0.600 0.650 0.700 0.750 0.800
30
40
50
60
70
80
90
d.c.
Vol
tage
[kV]
Vdc_ref Vdc V_c1 V_c2
(b)
(a)

56
Figura 3-7 STATCOM en tres niveles: Respuesta escalón del voltaje RMS, para
sistema (a) Débil, y (b) Fuerte.
Figura 3-8 STATCOM en tres niveles: Ejemplo de formas de onda de (a) Voltaje
de línea, y (b) Corriente.
Time [s] 0.400 0.450 0.500 0.550 0.600 0.650 0.700
0.980
1.000
1.020
1.040
1.060
1.080
Bus
Volta
ge V
s [p
u]
Vs_rms_REF Vsd_pos
Time [s] 0.400 0.450 0.500 0.550 0.600 0.650 0.700
0.980
1.000
1.020
1.040
1.060
1.080
Bus
Volta
ge V
s [p
u]
Vs_rms_REF Vsd_pos
1.000 1.010 1.020 1.030 1.040 1.050
-150
-100
-50
0
50
100
150
Volta
ge [k
V]
Vtab
1.000 1.010 1.020 1.030 1.040 1.050
-3.0
-2.0
-1.0
0.0
1.0
2.0
3.0
Cur
rent
[kA]
Ita
(a)
(b)
(a)
(b)

57
3.4.3 Control de voltaje RMS
En este punto se testea la respuesta escalón de la referencia del control
del voltaje RMS en el punto PCC, Vs . Su referencia Vs ref es cambiada de
1.0 pu a 1.05 pu en t = 0.5 s, para ambas condiciones del sistema.
En este caso, el voltaje RMS sigue una referencia escalón en 2 períodos
fundamentales, definitivamente mayor al caso de dos niveles. El ripple en las
señales mostradas es agregado solo por el filtro de secuencia positiva. Un
ejemplo de las formas de onda instantáneas de tensión y corriente para un
convertidor de tres niveles es mostrado en Figura 3-8
El control de corriente de ambos STATCOMS tiene similares respuestas. El
control de voltaje DC en el caso de tres niveles es menor que en el de dos. El
balance del voltaje de los capacitores se realiza en forma efectiva. En términos
generales, el convertidor en tres niveles tiene mejor respuesta en términos de
rapidez. Esta configuración es elegida para proseguir con las simulaciones de las
contingencias, para sistema en condición débil solamente.
3.5 VARIACIÓN DE CARGA
3.5.1 Conexión y desconexión de carga balanceada
La carga P + Q de la Tabla 3.5 es agregada al bus Cerro Navia 110
kV en t = 0.5, y es removida en t = 0.8 s. La carga nominal para condición débil
se mantiene constante.
Al conectar la carga, es lógico que el voltaje en el PCC tienda a disminuir.
Esta variación, es rápidamente compensada por la corriente reactiva en
secuencia positiva, mostrada en Figura 3-9 (a). En la Figura 3-9 (b), se aprecia
cómo el voltaje se reduce a 0.97 pu, pero vuelve a su valor nominal de 1.05 pu
gracias a la inyección de potencia reactiva. En la Figura 3-9 (c) se aprecia cómo
hubiese sido el transiente de voltaje si no existiera ninguna acción del
STATCOM; el voltaje se mantendría a un nivel más bajo que el nominal,
mientras que durante la conexión de la carga, éste baja cercan al 0,98 pu,
cayendo alrededor de 0,05 pu de su valor en estado estable.

58
Figura 3-9 Variación de carga balanceada: (a) Componente en cuadratura de la corriente en secuencia positiva. (b) Voltaje RMS en el PCC. (c) Voltaje RMS en
el PCC sin acción del STATCOM.
En Figura 3-10(a) es posible ver que los voltajes de línea en el PCC
prácticamente no han variado debido a la conexión de la carga. En la Figura 3-
10(b) se aprecian las corrientes de salida del convertidor, que crece
significativamente para restaurar el voltaje. Finalmente en la Figura 3-10(c) se
aprecian las potencias activa y reactiva entrantes al convertidor, aumentando
ésta última de 5 MVAr inductivos a 40 MVAr capacitivos.
3.5.2 Conexión y desconexión de carga desbalanceada
Para testear el control en secuencia negativa, se debe conectar una carga
desbalanceada. El control debiera restituir por completo la componente de
Time [s] 0.40 0.50 0.60 0.70 0.80 0.90 1.00
-2.0
-1.0
0.0
1.0
2.0
Cur
rent
[kA]
Itq_pos_REF Itq_pos
Time [s] 0.40 0.50 0.60 0.70 0.80 0.90 1.00
0.950
1.000
1.050
1.100
1.150
Bus
Volta
ge V
s [p
u]
Vs_rms_REF Vsd_pos
Time [s] 0.40 0.50 0.60 0.70 0.80 0.90 1.00
0.900
0.950
1.000
1.050
1.100
Bus
Volta
ge V
s [p
u]
Vs_rms_REF Vsd_pos
(a)
(b)
(c)
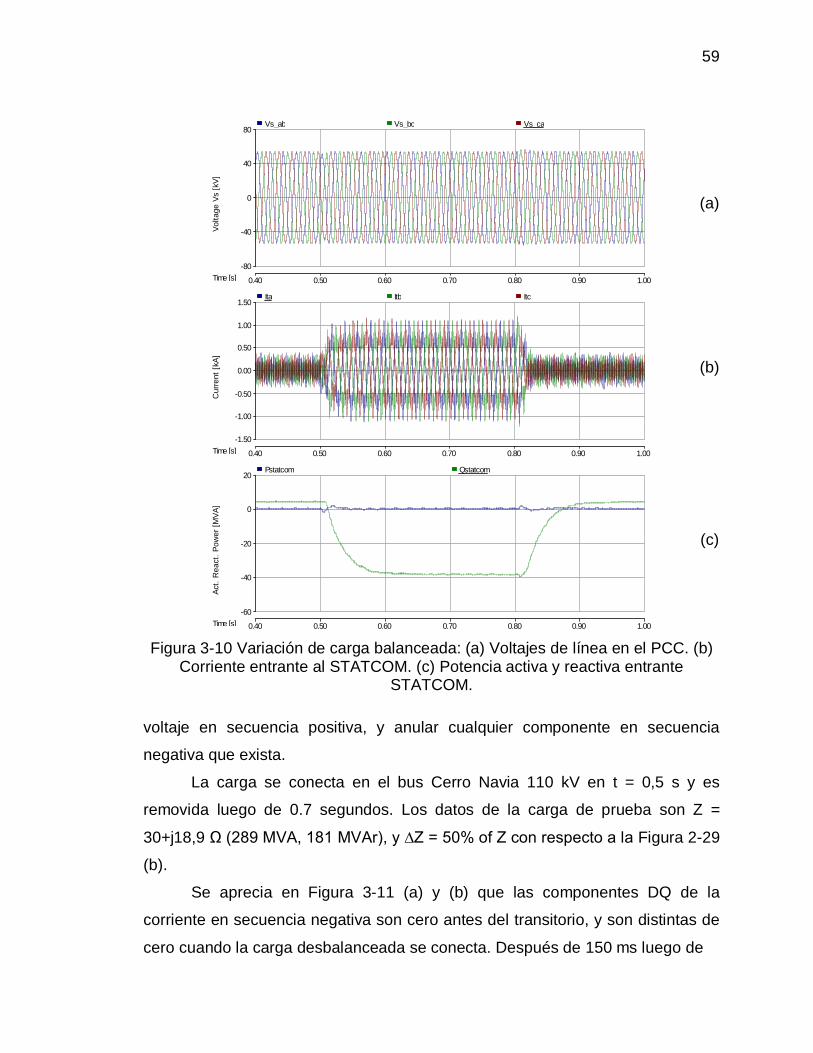
59
Figura 3-10 Variación de carga balanceada: (a) Voltajes de línea en el PCC. (b)
Corriente entrante al STATCOM. (c) Potencia activa y reactiva entrante STATCOM.
voltaje en secuencia positiva, y anular cualquier componente en secuencia
negativa que exista.
La carga se conecta en el bus Cerro Navia 110 kV en t = 0,5 s y es
removida luego de 0.7 segundos. Los datos de la carga de prueba son Z =
30+j18,9 Ω (289 MVA, 181 MVAr), y ∆Z = 50% of Z con respecto a la Figura 2-29
(b).
Se aprecia en Figura 3-11 (a) y (b) que las componentes DQ de la
corriente en secuencia negativa son cero antes del transitorio, y son distintas de
cero cuando la carga desbalanceada se conecta. Después de 150 ms luego de
Time [s] 0.40 0.50 0.60 0.70 0.80 0.90 1.00
-80
-40
0
40
80
Volta
ge V
s [k
V]
Vs_ab Vs_bc Vs_ca
Time [s] 0.40 0.50 0.60 0.70 0.80 0.90 1.00
-1.50
-1.00
-0.50
0.00
0.50
1.00
1.50
Cur
rent
[kA
]
Ita Itb Itc
Time [s] 0.40 0.50 0.60 0.70 0.80 0.90 1.00
-60
-40
-20
0
20
Act.
Rea
ct. P
ower
[MVA
]
Pstatcom Qstatcom
(a)
(b)
(c)

60
Figura 3-11 Variación de carga desbalanceada: Componente (a) Directa, y (b) en
Cuadratura de la corriente en secuencia negativa, entrante al STATCOM.
la conexión de la carga, se retoma el control de la corriente en secuencia
negativa, esta vez distinta de cero dado la existencia de voltaje en secuencia
negativa en el PCC.
Es de esperar que la reacción del control en secuencia negativa sea algo
más lento que en secuencia positiva, dado que primero se tiene que establecer
el voltaje en secuencia positiva para que el control de secuencia negativa pueda
actuar desbalanceando las tensiones fasoriales del convertidor.
Debido a la inyección de corriente en secuencia negativa, el voltaje en
secuencia negativa es anulado, tal como se muestra en Figura 3-12 (a). A modo
de ejemplo en la Figura 3-.12 (b), se muestra la forma de onda de las
componentes DQ del voltaje en el PCC sin control de secuencia negativa. Estas
son distintas de cero durante todo el periodo de conexión de la carga
desbalanceada.
En Figura 4-13 (b) se observa que el voltaje en el DC-Link posee una
oscilación en 100 Hz, al doble de la frecuencia fundamental. Esto es debido al
Time [s] 0.40 0.60 0.80 1.00 1.20 1.40 1.60 1.80
-1.00
-0.50
0.00
0.50
1.00
Cur
rent
[kA]
Itd_neg_REF Itd_neg
Time [s] 0.40 0.60 0.80 1.00 1.20 1.40 1.60 1.80
-1.00
-0.50
0.00
0.50
1.00
Cur
rent
[kA
]
Itq_neg_REF Itq_neg
(a)
(b)

61
Figura 3-12 Variación de carga desbalanceada: Componente directa y en
cuadratura del voltaje PCC en secuencia negativa, (a) Con control de secuencia negativa, y (b) Sin control de secuencia negativa.
Figura 3-13 Variación de carga desbalanceada: (a) Componente directa de la
corriente en secuencia positiva. (b) Voltajes en el DC-Link.
Time [s] 0.40 0.60 0.80 1.00 1.20 1.40 1.60 1.80
-0.040
-0.020
0.000
0.020
0.040
Neg
. Sec
. Bus
Vol
tage
[pu]
Vsd_neg Vsq_neg
Time [s] 0.40 0.60 0.80 1.00 1.20 1.40 1.60 1.80
-0.040
-0.020
0.000
0.020
0.040
Neg
. Sec
. Bus
Vol
tage
[pu]
Vsd_neg Vsq_neg
Time [s] 0.40 0.60 0.80 1.00 1.20 1.40 1.60 1.80
-1.0
0.0
1.0
2.0
3.0
Cur
rent
[kA]
Itd_pos_REF Itd_pos
Time [s] 0.40 0.60 0.80 1.00 1.20 1.40 1.60 1.80
30
45
60
75
90
d.c.
Vol
tage
[kV]
Vdc_ref Vdc V_c1 V_c2
(a)
(a)
(b)
(b)

62
intercambio de potencia activa y reactiva desde la secuencia positiva a la
secuencia negativa. Esta oscilación provoca una componente de 3ra harmónica
en voltaje de secuencia positiva, y una componente fundamental en secuencia
negativa. En la Figura 3-13 (a) se observa que la componente real de la corriente
en secuencia positiva controla completamente el voltaje en el DC-Link en torno a
su valor nominal, independiente de esta oscilación
La componente en cuadratura de la corriente en secuencia positiva
controla el voltaje RMS en el PCC. Se observa en Figura 3-14 (a) que la
Figura 3-14 Variación de carga desbalanceada: (a) Componente en cuadratura
de la corriente en secuencia positiva. (b) Voltaje RMS en el PCC. (c) Voltaje RMS en el PCC sin acción del STATCOM.
Time [s] 0.40 0.60 0.80 1.00 1.20 1.40 1.60 1.80
-1.0
0.0
1.0
2.0
3.0
Cur
rent
[kA]
Itq_pos_REF Itq_pos
Time [s] 0.40 0.60 0.80 1.00 1.20 1.40 1.60 1.80
0.950
1.000
1.050
1.100
1.150
Bus
Volta
ge V
s [p
u]
Vs_rms_REF Vsd_pos
Time [s] 0.40 0.60 0.80 1.00 1.20 1.40 1.60 1.80
0.900
0.950
1.000
1.050
1.100
1.150
Bus
Volta
ge V
s [p
u]
Vs_rms_REF Vsd_pos
(a)
(b)
(c)

63
corriente aumenta debido a la baja de tensión provocada por la carga. El voltaje
RMS disminuye en los momentos posteriores a la conexión y rápidamente es
compensado, volviendo a su valor, como se muestra en Figura 4.15 (b). En
Figura 4.15 (c) se observa la variación de voltaje RMS sin compensación del
STATCOM, el cual en ningún momento está en su valor nominal, y que sufre una
variación de 0,08 pu al momento de conexión de la carga.
Se observa de la Figura 3-15 (a) y Figura 3-15 (b) y que los voltajes de
fase permanecen balanceados después de la conexión de la carga. Las
corrientes en Figura 3-15 (c) y (d) son desbalanceadas debido al carácter de la
carga. Al apreciar la Figura 3-16, se observa que las potencias inyectadas al
sistema poseen un ripple de 100 Hz debido a la oscilación del DC-Link, sin
embargo, mantienen un valor medio fijo inyectado tanto en secuencia positiva y
secuencia negativa inyectando alrededor de 90 MVAr al sistema
Figura 3-15 Variación de carga desbalanceada: Voltajes de línea en el PCC durante (a) Conexión de la carga, y (b) Desconexión de la Carga. Corrientes de entrada al STATCOM durante (c) Conexión de la carga, y (d) Desconexión de la
Carga.
Load Disconnection
Time [s] 1.175 1.200 1.225 1.250 1.275 1.300 1.325 1.350 ... ... ...
-3.0
-2.0
-1.0
0.0
1.0
2.0
3.0
Cur
rent
[kA]
Ita Itb Itc
Load Disconnection
Time [s] 1.175 1.200 1.225 1.250 1.275 1.300 1.325 1.350 ... ... ...
-80
-60
-40
-20
0
20
40
60
80
Line
Vol
tage
s Vs
[kV]
Vs_ab Vs_bc Vs_caLoad Connection
Time [s] 0.475 0.500 0.525 0.550 0.575 0.600 0.625 0.650 ... ... ...
-80
-60
-40
-20
0
20
40
60
80
Line
Vol
tage
s Vs
[kV]
Vs_ab Vs_bc Vs_ca
Load Connection
Time [s] 0.475 0.500 0.525 0.550 0.575 0.600 0.625 0.650 ... ... ...
-3.0
-2.0
-1.0
0.0
1.0
2.0
3.0
Cur
rent
[kA]
Ita Itb Itc
(a) (b)
(c) (d)

64
Figura 3-16 Variación de carga desbalanceada: Potencia activa y reactiva
entrante STATCOM.
3.6 FALLA BIFÁSICA A TIERRA
Se elije realizar una falla bifásica a tierra para testear tanto el control de
secuencia positiva y el control de secuencia negativa en caso de contingencia.
La falla está en la barra Cerro Navia 220 kV el cual está separado del STATCOM
solo por transformador de acoplamiento. La impedancia de falla escogida es de
Z = 5 Ω y se aplica en t = 0.6 s, con 150 ms de duración.
El control de secuencia negativa no logra restablecer el balance de los
voltajes en el PCC. Se observa en la Figura 3-17 (a) y Figura 3-17 (b) que debido
al efecto de transiente, prácticamente no hay control sobre la corriente en
secuencia negativa. Esta fluye libremente debido al gran desbalance en el PCC,
y dado que el STATCOM posee una limitación para su uso en secuencia
negativa, no es posible mantener balanceado el voltaje, tal como se muestra en
la Figura 3-17 (c) y Figura 3-17 (d).
La oscilación en el voltaje del DC-Link es considerable. El desbalance
provoca que tanto el voltaje en el DC-Link, mostrado en Figura 3-18 (b), y el
control de voltaje DC, mostrado en Figura 3-18 (a), sufran un descontrol. La
oscilación es en torno de los 100 Hz, y desaparece luego de 200 ms después del
despeje de falla. En Figura 3-19 (a) se aprecia como el control del voltaje RMS
intenta aumentar el voltaje en el PCC. El STATCOM inyecta su máxima
capacidad de reactivos. El voltaje RMS mostrado en la Figura 3-19 (b) baja de
1,05 pu a 0,66 pu durante la falla. Es de gran importancia mostrar que en este
caso el STATCOM si posee un efecto en el control de voltaje durante falla; visto
Time [s] 0.40 0.60 0.80 1.00 1.20 1.40 1.60 1.80
-120
-100
-80
-60
-40
-20
0
20
Act.
Rea
ct. P
ower
[MVA
]
Pstatcom Qstatcom

65
como se muestra en Figura 3-19 (c), sin control RMS el voltaje cae a 0,55 pu
aproximadamente.
Figura 3-17 Falla bifásica a tierra: Componente (a) Directa, y (b) en Cuadratura
de la corriente en secuencia negativa, entrante al STATCOM. Componente directa y en cuadratura del voltaje PCC en secuencia negativa, (c) Con control
de secuencia negativa, y (d) Sin control de secuencia negativa.
Time [s] 0.40 0.60 0.80 1.00 1.20 1.40
-3.0
-2.0
-1.0
0.0
1.0
2.0
3.0
4.0
Cur
rent
[kA]
Itd_neg_REF Itd_neg
Time [s] 0.40 0.60 0.80 1.00 1.20 1.40
-2.0
-1.0
0.0
1.0
2.0
3.0
4.0
5.0
Cur
rent
[kA]
Itq_neg_REF Itq_neg
Time [s] 0.40 0.60 0.80 1.00 1.20 1.40
-0.20
-0.10
0.00
0.10
0.20
0.30
Neg
. Sec
. Bus
Vol
tage
[pu]
Vsd_neg Vsq_neg
Time [s] 0.40 0.60 0.80 1.00 1.20 1.40
-0.20
-0.10
0.00
0.10
0.20
0.30
Neg
. Sec
. Bus
Vol
tage
[pu]
Vsd_neg Vsq_neg
(a)
(b)
(c)
(d)

66
Figura 3-18 Falla bifásica a tierra: (a) Componente directa de la corriente en
secuencia positiva. (b) Voltajes en el DC-Link.
Finalmente, en la Figura 3-19 (a) se muestran los voltajes de línea
claramente desbalanceados; en Figura 3-19 (b) se observan las corrientes
instantáneas, que durante falla están desbalanceadas, pero ejercen un control
en el valor RMS del voltaje en el PCC; y finalmente en Figura 3-19 (c) se observa
la potencia absorbida por el STATCOM, evidenciando una oscilación en 100 Hz,
producto del desbalance de las fases y su efecto en el DC-Link.
El STATCOM inyecta una potencia media de 60 MVAr al sistema durante
falla, y las oscilaciones desaparecen alrededor de 200 ms después de ésta. El
STATCOM ejerce control solamente en secuencia positiva, pero le es imposible
amortizar las oscilaciones de potencia en 100 Hz provenientes del DC-Link.
Existe un pequeño efecto en la tensión durante falla, del orden de 0,1 o 0,15 pu
de diferencia en el caso de que no haya ningún control del voltaje RMS. En
secuencia negativa, el STATCOM no tiene influencia si se trata de una falla
severa.
Time [s] 0.50 0.60 0.70 0.80 0.90 1.00 1.10
-3.0
-2.0
-1.0
0.0
1.0
2.0
3.0
Cur
rent
[kA]
Itd_pos_REF Itd_pos
Time [s] 0.50 0.60 0.70 0.80 0.90 1.00 1.10
0
20
40
60
80
100
120
d.c.
Vol
tage
[kV]
Vdc_ref Vdc V_c1 V_c2
(a)
(b)

67
Figura 3-19 Falla bifásica a tierra: (a) Componente en cuadratura de la corriente en secuencia positiva. (b) Voltaje RMS en el PCC. (c) Voltaje RMS en el PCC sin
acción del STATCOM.
3.7 DESCONEXIÓN DE LÍNEA
El caso final de estudio es ver cuál es la respuesta del STATCOM ante una
desconexión de línea imprevista. Para ello, se elije la línea Ancoa – Alto Jahuel
500 kV. Esto ocurre en t = 0.5 s. Esta contingencia es totalmente balanceada,
por lo que solamente las variables importantes se mostrarán.
Time [s] 0.50 0.60 0.70 0.80 0.90 1.00 1.10
-1.0
0.0
1.0
2.0
3.0
4.0
5.0
Cur
rent
[kA]
Itq_pos_REF Itq_pos
Time [s] 0.50 0.60 0.70 0.80 0.90 1.00 1.10
0.40
0.60
0.80
1.00
1.20
1.40
Bus
Volta
ge V
s [p
u]
Vs_rms_REF Vsd_pos
Time [s] 0.50 0.60 0.70 0.80 0.90 1.00 1.10
0.40
0.60
0.80
1.00
1.20
1.40
Bus
Volta
ge V
s [p
u]
Vs_rms_REF Vsd_pos
(a)
(b)
(c)

68
Figura 3-20 Falla bifásica a tierra: (a) Voltajes de línea en el PCC. (b) Corriente
entrante al STATCOM. (c) Potencia activa y reactiva entrante STATCOM.
En la Figura 3-21 (a) se aprecia como el control inyecta corriente reactiva
al sistema, cuando este sufre de una desconexión de una línea importante. El
voltaje en el PCC caerá en forma natural, mientras que el STATCOM intenta
mantenerlo en su valor nominal, tal como se muestra en Figura 3-21 (b). En el
caso de que no haya control del voltaje RMS, éste tiene un valor inferior al
nomina, y se ve afectado claramente cuando la línea se desconecta, bajando de
1.03 pu a 1.01 pu, tal como se muestra en la Figura 3-21 (c).
Los voltajes de línea prácticamente no se ven afectados debido a la
acción del STATCOM ante la contingencia, tal como se muestra en la Figura 3-
0.50 0.60 0.70 0.80 0.90 1.00 1.10
-90
-60
-30
0
30
60
90
Volta
ge V
s [k
V]
Vs_ab Vs_bc Vs_ca
Time [s] 0.50 0.60 0.70 0.80 0.90 1.00 1.10
-8.0
-4.0
0.0
4.0
8.0
Cur
rent
[kA]
Ita Itb Itc
Time [s] 0.50 0.60 0.70 0.80 0.90 1.00 1.10
-150
-100
-50
0
50
100
Act.
Rea
ct. P
ower
[MVA
]
Pstatcom Qstatcom
(a)
(b)
(c)

69
22 (a). Las corrientes instantáneas apreciadas en la Figura 3-22 (b) son
totalmente balanceadas, mientras que la potencia máxima inyectada alcanza los
40 MVAr, en Figura 3-22 (c).
Figura 3-21 Desconexión de línea: (a) Componente en cuadratura de la corriente en secuencia positiva. (b) Voltaje RMS en el PCC. (c) Voltaje RMS en el PCC sin
acción del STATCOM.
Time [s] 0.400 0.450 0.500 0.550 0.600 0.650 0.700
0.00
0.20
0.40
0.60
0.80
1.00
1.20
Cur
rent
[kA
]
Itq_pos_REF Itq_pos
Time [s] 0.400 0.450 0.500 0.550 0.600 0.650 0.700
1.000
1.020
1.040
1.060
1.080
1.100
Bus
Volta
ge V
s [p
u]
Vs_rms_REF Vsd_pos
Time [s] 0.400 0.450 0.500 0.550 0.600 0.650 0.700
0.980
1.000
1.020
1.040
1.060
1.080
Bus
Volta
ge V
s [p
u]
Vs_rms_REF Vsd_pos
(a)
(b)
(c)
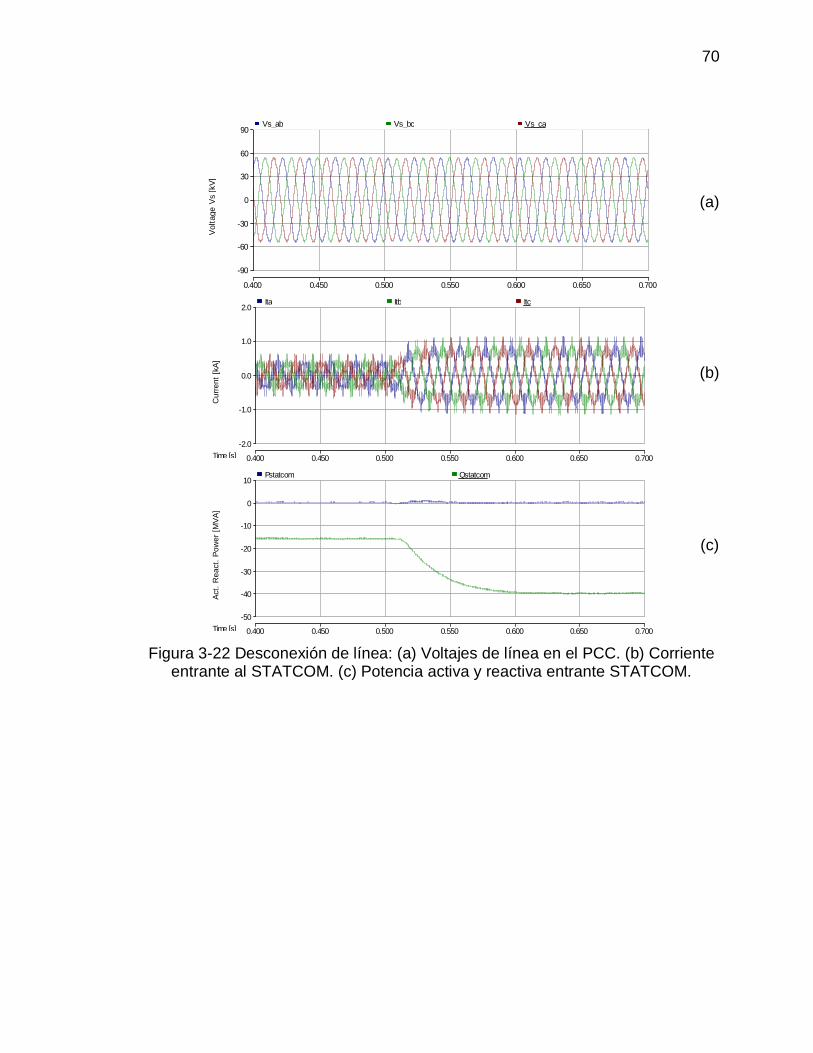
70
Figura 3-22 Desconexión de línea: (a) Voltajes de línea en el PCC. (b) Corriente
entrante al STATCOM. (c) Potencia activa y reactiva entrante STATCOM.
0.400 0.450 0.500 0.550 0.600 0.650 0.700
-90
-60
-30
0
30
60
90
Volta
ge V
s [k
V]
Vs_ab Vs_bc Vs_ca
Time [s] 0.400 0.450 0.500 0.550 0.600 0.650 0.700
-2.0
-1.0
0.0
1.0
2.0
Cur
rent
[kA]
Ita Itb Itc
Time [s] 0.400 0.450 0.500 0.550 0.600 0.650 0.700
-50
-40
-30
-20
-10
0
10
Act.
Rea
ct. P
ower
[MVA
]
Pstatcom Qstatcom
(a)
(b)
(c)

4 CONCLUSIONES
En este trabajo, los beneficios acerca del STATCOM relacionados con el
control de tensión, el margen de estabilidad y aumento de la capacidad de
transferencia de potencia se discutieron en el capítulo 2. Al enfocar esquema
equivalente del STATCOM como un compensador ideal modelado como una
fuente de corriente, nos ayudan a entender cómo el rendimiento del sistema se
incrementa en diferentes aspectos.
Un modelo de la STATCOM completo se da en el capítulo 3. Dos
estructuras físicas se modelaron en esta tesis: una utilizando un convertidor de
dos niveles y otra con un convertidor de tres niveles del tipo NPC. El convertidor
está conectado a un inductor de interfaz facilita el intercambio de potencia activa
y reactiva con el sistema. La estrategia de control basada en teoría de la
transformación de Park se detallada en el capítulo 3. Ésta enfoca el control del
voltaje RMS en el PCC, así como el control de voltaje DC en el condensador,
utilizando un controlador dedicado corriente de secuencia positiva. Del mismo
modo, el control de balance de tensiones fasoriales en el PCC y su controlador
dedicado corriente de secuencia negativa elimina cualquier componente de
secuencia negativa en la tensión del bus. Un sistema de medición confiable se
llevó a cabo con el fin de obtener cantidades de secuencia positiva y negativa del
sistema por separado, todo en cantidades expresadas en el eje DQ de Park.
Se utilizó un sistema de transmisión real para probar el rendimiento del
STATCOM ante funcionamiento normal y contingencias. Se concluyó que el
STATCOM es capaz realizar control de tensión AC y DC tanto en un sistema
fuerte y sistema débil.
Para contingencias, se utilizó solamente el sistema en condición débil. Se
concluye que el STATCOM puede reponer el voltaje en secuencia positiva
cuando una carga balanceada, así como también cuando la carga es
desbalanceada. En este último caso, el control de secuencia negativa elimina
toda componente en secuencia negativa del voltaje en el PCC, balanceando
nuevamente las tensiones.

72
Para caso de falla, se simuló una bifásica a tierra. El control de secuencia
positiva intenta reponer el voltaje, pero ayuda solamente a subir una pequeña
porcentual de éste. El control de secuencia negativa no posee control sobre el
desbalance ocurrido por la falla.
Para desconexión de línea en 500 kV, el fenómeno no produce mayores
alteraciones en las cercanías del STATCOM. Este responde fácilmente
reponiendo el voltaje a su valor nominal.
Otros estudios pueden ser realizados utilizando el mismo análisis del
STATCOM en aplicaciones en sistemas de transmisión. Por ejemplo, es posible
asistir a la amortiguación de oscilaciones electromecánicas de los generadores
en caso de falla, mediante la inyección y absorción de potencia reactiva con la
red. Se puede agregar un modelado de un banco de baterías, y estudiar las
ventajas de utilizar potencia activa para aumentar la calidad y seguridad de la
red.

REFERENCIAS BIBLIOGRÁFICAS
[1] C. K. Sao, P.W. Lehn, M. R Iravani, and J. A. Martinez. “A benchmark
System for Digital Time-Domain Simulation of a Pulse-Width-Modulated D-
STATCOM.” IEEE Trans. Power Delivery. vol 17. no14. Oct. 2002.
[2] N. G. Hirogami, and L. Gyugyi. “Understandig FACTS. Concepts and
Technology of flexible AC Transmission System.” IEEE Press. no.
PC5713. 1999.
[3] A. Gosh, and G. Ledwich. Power Quality Enhancement Using Custom
Power Devices. Kluwer’s Power Electronic and Power System Series.
2002.
[4] I. A. Erimez, and A. M. Foss. Static Synchronous Compensation. CIGRE
Working Group 14.19 Report. 2000.
[5] C. K. Sao. Autonomous Load Sharing of Voltage Source Inverters. 2002.
Ms. of Sc. Thesis. University of Toronto.
[6] C. K. Sao and P. W. Lehn. “Voltage Balancing of Inverter Fed Microgrids
with Single Phase Loads.” Power and Energy Society General Meeting,
2008 IEEE
[7] C. Hochgraf, and R. H. Lasseter. “StatCom Controls for Operation with
Unbalanced Voltages.” IEEE Trans. Power Delivery. vol 13. no 2. Apr.
1998.
[8] M. Illindala, Vector Control of PWM VSI Based Distributed Resources in
Microgrid. University of Wisconsin-Madison, Madison, Wisconsin: PhD
Dissertation, 2005.
[9] J. Zaragoza, J. Pou, S. Ceballos, E. Robles, C. Jaen, and M. Corbalán.
“Voltage-Balance Compensator for a Carrier-Based Modulation in the
Neutral-Point-Clamped-Inverter.” IEEE Trans. on Industrial Electronics. vol
56. no 2. Feb. 2009.
[10] J. Zaragoza, J. Pou, S. Ceballos, E. Robles, and C. Jaen. “Optimal
Voltage-Balancing Compensator in the Modulation of a Neutral-Point-

98
Clamped-Inverter.” IEEE International Symposium on Industrial
Electronics, Vigo. Jun. 2007.
[11] K. R. Padiyar. FACTS Controllers in Power Transmission and Distribution.
New Age International (P) Ltd., Publishers. 1st ed. Jun. 2007.
[12] N. Mohan, T. M. Undeland, and W. P. Robbins. Power Electronics. John
Wiley & Sons, Inc. 2nd ed. 1995.
[13] A. Lindberg. PWM and Control of Two and Three Level High Power
Voltage Source Converters. Licentiate Thesis Kungl Tekniska Högskolan,
Stockholm.1995.


















