Robotica Industrial
35
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE EXTENSIÓN LATACUNGA ROBÓTICA INDUSTRIAL Ing. Patricia Constante
description
Introducción a al robótica industrial
Transcript of Robotica Industrial

UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE
EXTENSIÓN LATACUNGA
ROBÓTICA INDUSTRIAL
Ing. Patricia Constante

ROBÓTICA INDUSTRIAL
Patricia ConstanteESPE Latacunga

ROBÓTICADisciplina científica que aborda la investigación y desarrollo de una clase particular de sistemas mecánicos, los robots manipuladores, diseñados para realizar una amplia variedad de aplicaciones industriales, científicas, domésticas y comerciales.

Aspecto ético
• La sustitución de las máquinas por la mano humana.

Aspecto social
• Afecta en la economía de las empresas y aumenta las tazas de desempleo.

ANTECEDETES HISTÓRICOS
QUE ES UN ROBOT?
• Robot proviene de la palabra checa “robota” que significa trabajo
LAS 3 LEYES DE LA ROBOTICA:
1. Un robot no puede dañar a un ser humano o a través de la inacción permitir dañar al ser humano.
2. Un robot debe obedecer las órdenes dadas por los seres humanos, excepto cuando tales órdenes estén en contra de la primera ley.
3. Un robot debe proteger su propia existencia siempre y cuando esta protección no entre en conflicto con la primera y segunda ley.
QUE ES UN ROBOT INDUSTRIAL?
• La Asociación Japonesa de Robótica Industrial (JIRA): los robots son "dispositivos capaces de moverse de modo flexible análogo al que poseen los organismos vivos, con o sin funciones intelectuales, permitiendo operaciones en respuesta a las órdenes humanas".
• El Instituto de Robótica de América (RIA): un robot industrial es "un manipulador multifuncional y reprogramable diseñado para desplazar materiales, componentes, herramientas o dispositivos especializados por medio de movimientos programados variables con el fin de realizar tareas diversas".

MECATRÓNICA

ROBÓTICA: ÁREA MULTIDISCIPLINARIA
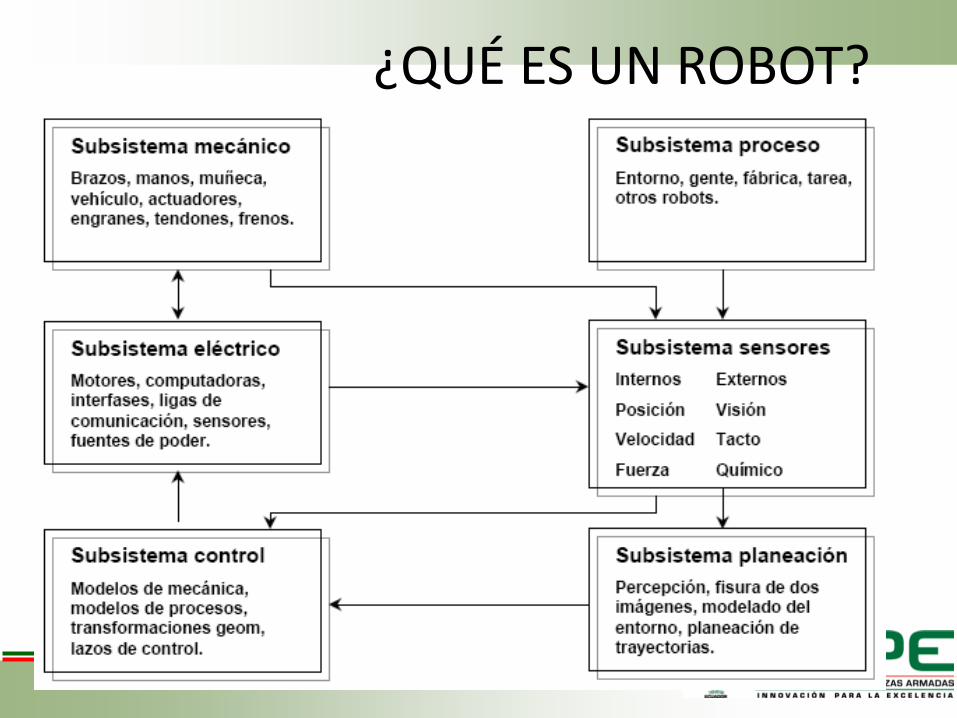
¿QUÉ ES UN ROBOT?

QUE ES UN ROBOT INDUSTRIAL?



TIPOS ROBOT

ROBOT INDUSTRIAL

ELEMENTOS
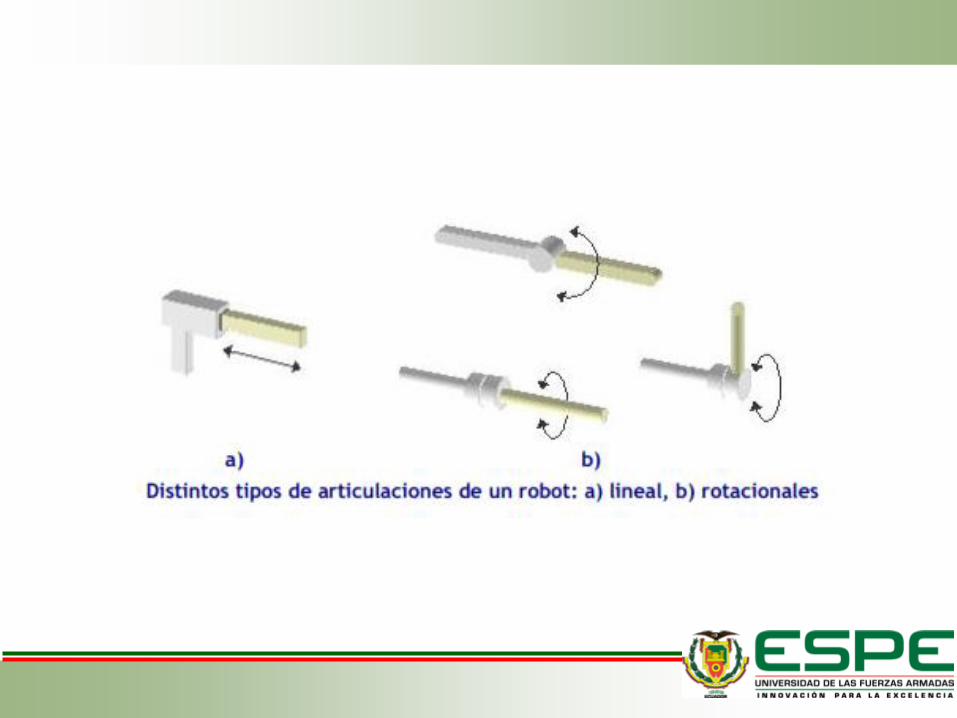
• Un manipulador robótico consta de una secuencia de elementos estructurales rígidos, denominados enlaces o eslabones, conectados entre sí mediante juntas o articulaciones, que permiten el movimiento relativo de cada dos eslabones consecutivos.

ELEMENTO TERMINAL

MANIPULADOR ROBÓTICO

MANIPULADOR ROBÓTICO

GRADOS DE LIBERTAD
• DOF: Cada una de las coordenadas independientes que son necesarias para describir el estado del sistema mecánico del robot
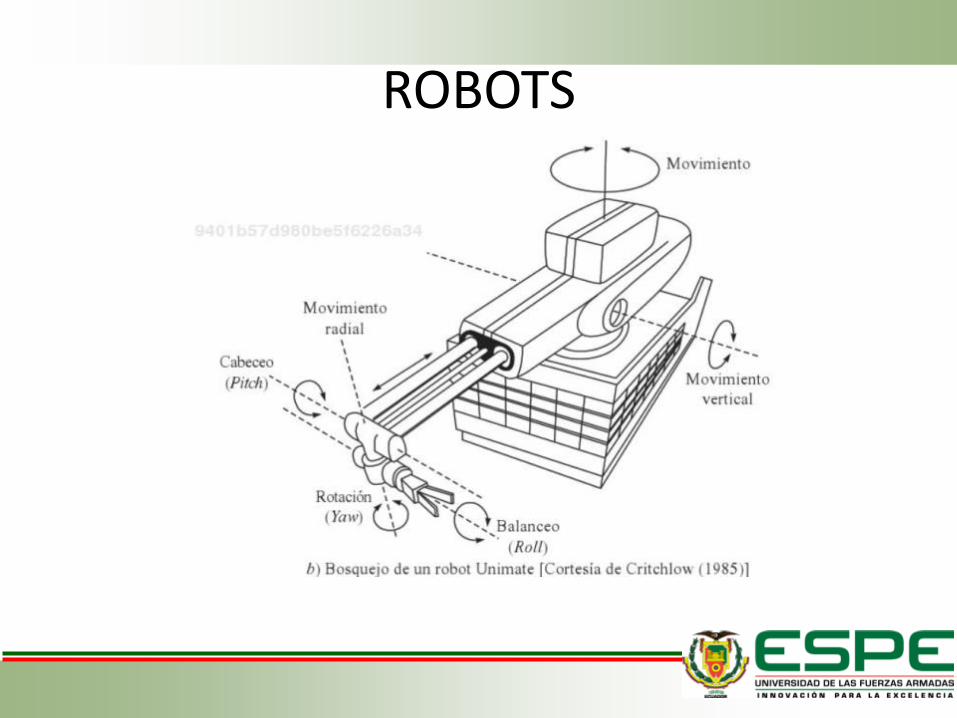
ROBOTS
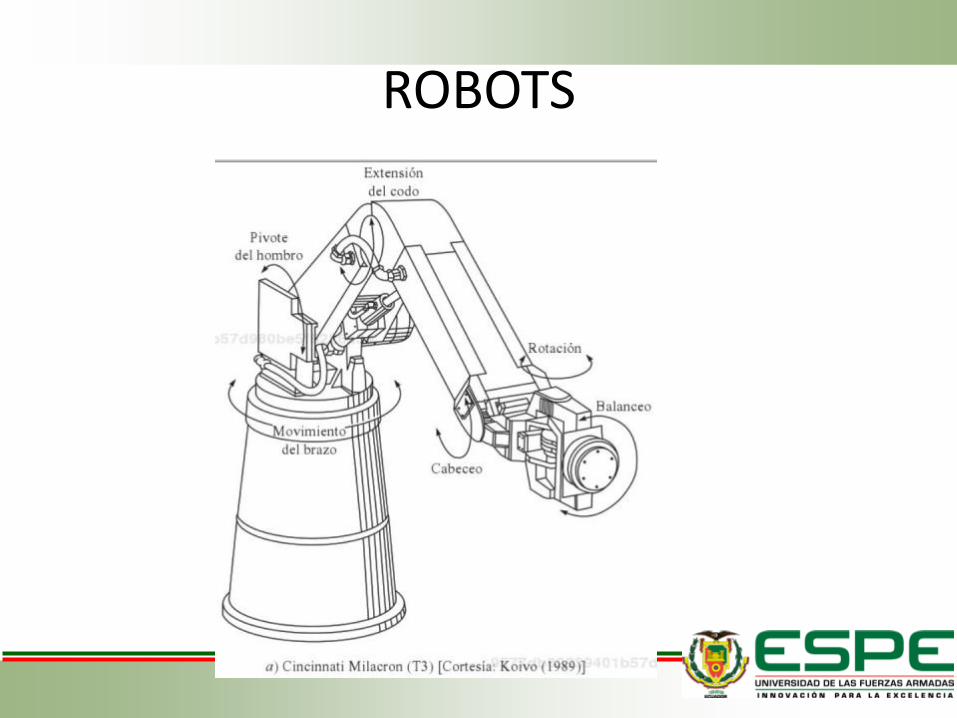
ROBOTS

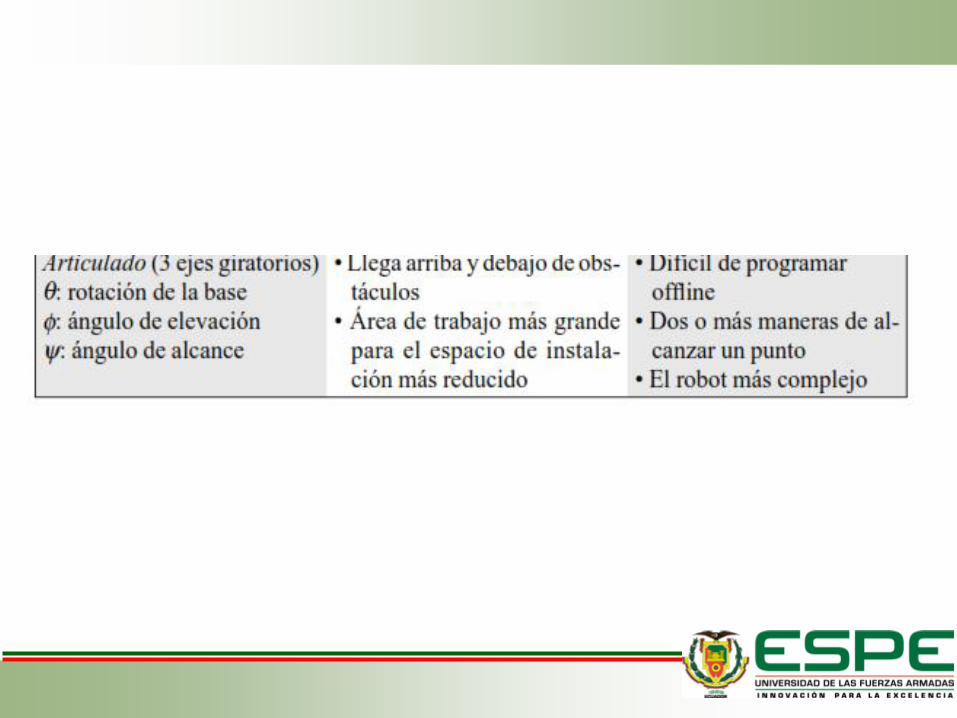
CONFIGURACIÓN MORFOLÓGICA

CONFIGURACIÓN MORFOLÓGICA

CONFIGURACIÓN MORFOLÓGICA

CONFIGURACIÓN MORFOLÓGICA

ROBOT PARALELO


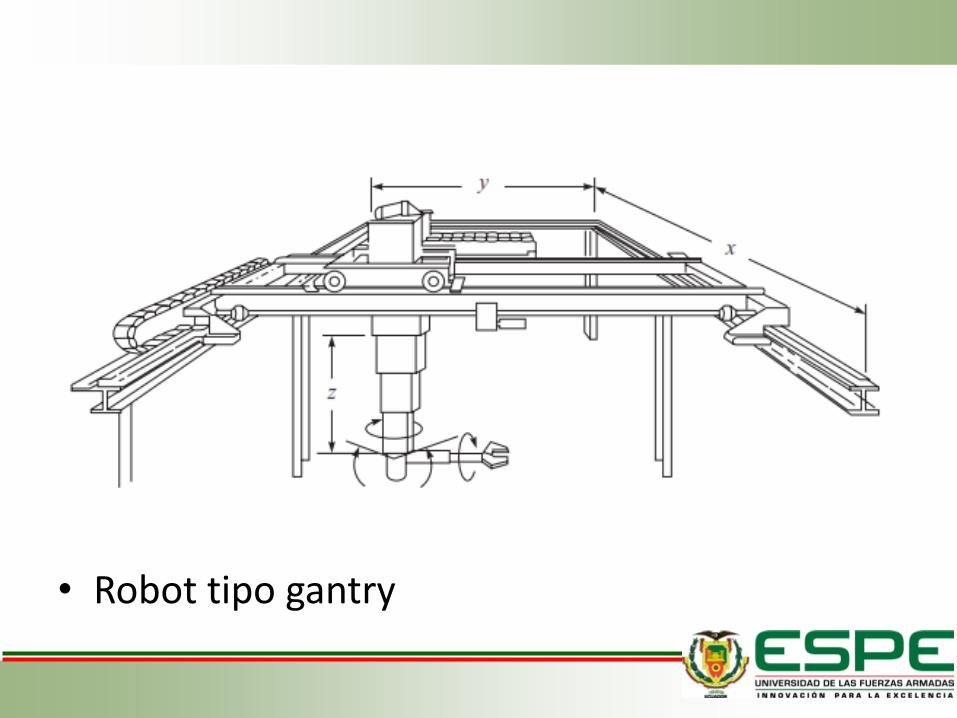
• Robot tipo gantry