Robotica y Automatizacion (RAS) PARTE I
41
-
Upload
hernan-charca -
Category
Documents
-
view
34 -
download
0
Transcript of Robotica y Automatizacion (RAS) PARTE I


ROBOTS LISTO PARA EL AIRE LIBRE!
Telémetro láser arregladas, gps e IMU 6 ejes integrados accssories Biblioteca de softwore (MOGS) de orientación exterior MobileRobots fusibles GPS, codificador y telemetría inercial para localizar el robot Bibliotecas de navegación proporcionan sólidas basadas en láser obstáculo evitación y planificacion de ruta dinámica
PAQUETE DE ORIENTACIÓN EXTERIOR:

REVISTA DE AUTOMATIZACIÓN ROBÓTICA
CARACTERÍSTICAS
22 Conjunto reactiva - control del cuerpo Manipulación dinámica de móvil utilizando un gran número de grados de libertad accionados
34 RoboCup@homeDemostrar habilidades de manipulación cotidiana en RoboCup@home.
43 Agarre simultáneo y motivo de planificaciónRobot humanoide ARMAR - III
58 Manipulación de móvil en entornos no estructuradosPercepción, planificación y ejecución.
72 Mitos de creaciónLos inicios de la investigación de robótica
78 Edometría VisualParte II: coincidencia, robustez, optimización y aplicaciones
En la portadaLa portada muestra una imagen de un títere bunraku japonés, que sirve como un ejemplo del concepto del Valle inquietante en el artículo traducido en la columna "Desde el campo".

COLUMNAS & DEPARTAMENTOS
4 Desde el escritorio del editor6 El mensaje de Presidente7 Nuevo y vistas10 Actividades industriales13 ROS temas16 Foco de TC18 De los editores invitados92 La esquina de estudiante94 En el estante98 De campo102 Noticias de sociedad110 Calendario112 Punto de inflexión
--

--

DEL ESCRITORIO DEL EDITOR Despedida a Roz
Contamos con una interesante colección de artículos para usted en este tema. Nuestro artículo de portada es el Valle del siniestro, un concepto importante en humanos / interacción de robot, sino uno cuyo origen no es bien conocida. Proviene de un artículo escrito por Masahiro Mori en 1970 para el diario japonés energía.En la columna "Desde el campo" en este tema, publicamos la primera traducción al español nunca del artículo, y en nuestra columna "Turning Point", tenemos una Entrevista con Mori.Nuestro tema monográfico es manipulación móvil, que ha sido editado por Oliver Brock, Dov Katz y Siddhartha Srinivasa. Este es un tema puntual sobre un tema que está ganando actualmente mucha atención. Reúne a manipulación clásica robot con robótica móvil moderno para lograr una capacidad única de robótica para las tareas del mundo real. También tenemos la parte final del tutorial "Edometría Visual" y nuestro surtido habitual de columnas regulares incluida la primera columna de "En el estante".Estoy interesado en ejecutar una futura edición especial sobre educación de robótica con un enfoque particular en el nivel universitario. Si usted tiene un interés en la edición de un tema tan especial, por favor contactarme directamente.En este tema, con profundo pesar, informar el fallecimiento de Miomir Vukobratovic, ingeniero mecánico serbio, quien hizo la contribución temprana a la dinámica y
control de manipuladores del robot. Una vez más, os remito a nuestro proyecto de historia del curso de robótica, y puede ver los trabajos en curso en
http://roboticshistory.indiana.edu . La revista tiene ahora acceso a la opción IEEE Post rápido, lo que significa que artículos pueden ser publicados electrónicamente antes de imprimir (o e impreso) en la revista. Rapid-post artículos se colocan en IEEE Xplore y, a continuación, pueden encontrarse por cualquiera de los mecanismos de búsqueda normal. Los artículos tienen un identificador de objeto digital pero no siempre tienen un volumen, tema o número de página hasta que se les asigna para ser publicado en la revista.Esto reducirá el tiempo entre la aceptación y publicación, que puede ser problemática cuando la revista tiene un atraso de artículo. Puede ver la lista actual de artículos post rápido desde el enlace de acceso temprano en portada de la revista Xplore (http://ieeexplore.ieee.org/xpl/RecentIssue . JSP? punumber = 100).Por último, me gustaría rendir homenaje a Rosalyn Snyder, quien se retiró de nuestra
sociedad en junio. Roz es una señora maravillosa que
mantiene caos en la bahía para nuestra sociedad y para esta revista.Muchos de ustedes habrían conoció en nuestras conferencias o interactuado con su
revista sobre negocios. Roz juntar la primera robótica y automatización Newsletter en 1987, el ancestro de la revista de hoy, antes incluso de empezar nuestra sociedad (era todavía un Consejo en ese momento), y ayudó a organizar IEEE Conferencia Internacional de la robótica y la automatización de ese mismo año en Raleigh. Ella se convirtió en un contratista en 1988 y, desde entonces, ha sido la constante influencia como presidentes, vice presidentes, miembros del Comité Administrativo y directores llegaron y se fueron. De hecho, ha trabajado con 15 presidentes de Consejo y sociedad. No recuerdo mi primera reunión con Roz, pero sin duda, yo estaba empezando en mi robótica carrera. Estoy realmente agradecido por la ayuda que ella me ha dado en su papel como asistente de redacción de la revista. La revista es efectivamente dos publicaciones en uno: los revisado artículos técnicos que son supervisadas por el Consejo Editorial y yo, hábilmente ayudado por un
ejército de revisores; el resto del contenido, como "Noticias de la sociedad", "Calendario de eventos," y así todo se realiza por Roz. Ella ha proporcionado apoyo enorme

para mí como aprendí las cuerdas, ha estado dispuesto a Skype en todo tipo de horas impares y generalmente se ha
mantenido el buen barco IEEE Robotics & Automation Magazine a flote. Le deseo todo lo mejor y espero que ella
disfruta le merecido jubilación o lo que viene a continuación.


NUTRIR EL LADO DE AUTOMATIZACIÓN DE LA SOCIEDAD
Saludos desde Columbus, Ohio y la Universidad Estatal de Ohio!Al momento de escribir esta columna a mediados de marzo, señales de la primavera empiezan a aparecer como una ruptura de lo que, este año, fue un invierno moderado. Mi foto fue tomada en nuestra cabina de retiro en las hermosas colinas de Hocking de Ohio Central, donde acaba de pasar un fin de semana tranquilo con mi familia. Esto fue muy apreciado tras un comienzo extremadamente ocupado de mi mandato como Presidente.Mis amigos y familiares a menudo preguntan: ¿qué hacer como Presidente? Mi respuesta de estos días es que, entre otras cosas, yo soy responsable de nombrar a muchos voluntarios para nuestras diversas juntas y comités en laIEEE de robótica y automatización Society (RAS). Como una sociedad impulsada por el voluntario, esta es una función muy importante. Durante el primer trimestre de 2012, trabajé con los oficiales de nombrarMiembros RAS a algunas 200 posiciones dentro de la sociedad. Esto no incluye los Copresidentes 75 o más de nuestros 25 comités técnicos (TCs) o más de 100 personas de nuestros comités de nominación del premio y evaluación Paneles. RAS también es miembro de los consejos técnicos de cuatro IEEE (biometría, Nanotecnología, sensores y sistemas), y tiene representantes en un número de otros comités de IEEE así. Afortunadamente, tenemos muchos capaz personas que están dispuestas a servir.Gracias. La sociedad realmente depende de usted!En mi última columna, presenté los cuatro temas estratégicos para mi mandato como Presidente. Uno de ellos es nutrir el lado de automatización de la sociedad. En esta columna, me gustaría decir
un poco más sobre esta dirección estratégica.La historia de RAS dentro de la IEEE se remonta a hace unos 30 años cuando TCs en la zona se formaron en la sociedad de sistemas de Control de IEEE (CSS) y la IEEE Computer Society (CS). La automatización y robótica TC fue introducido por CSS en 1981. La primera gran conferencia fue introducido por el TC de robótica en CS en 1984 como la Conferencia Internacional de IEEE en robótica, pero incluye automatización en 1985, cuando se convirtió en el IEEE International Conference on Roboticsy automatización (ICRA). Cuando la organización del campo técnico evolucionó en el IEEE un Consejo (1984) y, a continuación, una sociedad (1987–1989), automatización y robótica permanecieron Unidos juntos. Esto fue un relación natural robótica ya un lugar importante dentro de la área de automatización de la fábrica.Tiempo, automatización comenzaron a verse por separado desde la robótica con algunos se superponen, pero con un número de áreas que tenían poco que ver con Robótica. Para apoyar el campo de la ciencia de automatización e ingeniería, en2004, la sociedad bifurcado su diario (IEEE Transactions on robótica y Automatización) en IEEE Transactions on ciencia de automatización e ingeniería (T-ASE) y IEEE Transactions on Robotics (T-RO). Además, un nuevo en 2005 se creó la
Conferencia — IEEE International Conference on ciencia de automatización e ingeniería (caso). Estos están bien establecidos hoy en día y están sirviendo a la comunidad internacional. Sin embargo, han
surgido algunas preguntas respecto al área de automatización. Algunos están preocupados la automatización es el tipo de un hermano pequeño
a la robótica en la sociedad. El número de documentos y actividades en el área de automatización parece tener disminuido en ICRA. CASO y T ASE pueden han alcanzado el punto donde esperan pasar al siguiente nivel en términos de impacto dentro del campo. Hay algunas preguntas de "¿Qué es la automatización?" y esto es importante al considerar qué papeles caen dentro del ámbito de T-ASE o T-RO recientemente, la sociedad concluyó una revisión exitosa con la Junta de actividades técnicas de IEEE (ficha). En sus observaciones de resumen, la sociedad de la ficha
Comité de revisión (SRC) declaró que la robótica y la automatización es una bien administrada, financieramente sólida sociedad con creciente membrecía y una amplia gama de actividades de excelentes... En general, sus conferencias y publicaciones tienen éxito, y la sociedad hace un buen trabajo de garantizar la cobertura en todo el mundo en sus actividades.El SRC reconoció nuestra fuerza en la cobertura de la robótica y nuestros esfuerzos para fortalecer la cobertura de la automatización.El informe SRC pasó a recomendar: "La sociedad debe continuar sus esfuerzos para fortalecer su huella de automatización".
(continuación en la pag 8)

NUEVOS ROBOTS: SIDEKICKS DE SUPERHÉROESScifi películas a menudo elenco robots como villanos, pero nuevas aplicaciones robóticas (apps) son más probable es que los compañeros que hacen personas de superhéroes. Integran con la actividad humana de manera transparente a ampliar las capacidades de las personas y lograr sus metas. Como lentes y telescopios sirven para mejorar la visualización, los robots mejores servirán para mejorar la precisión, repetibilidad, velocidad, alcance y poder de movimiento humano y la sensibilidad, precisión, alcance e interpretación de los sentidos humanos. Como resultado, sólo podemos imaginar las nuevas industrias que se broten. Activadores de superhéroes ya top listas de ventas de robot. Sistema quirúrgico da del intuitivo Vinci, superior a US$ 1 billón de robots instalados, es un ejemplo por excelencia. El sistema amplifica visión cirujanos, precisión y destreza. Asimismo, decenas de miles de robots de vigilancia, de Qinetiq, Black-I y otros, potenciar a los ojos de los soldados para ver alrededor de las esquinas y muros que bloquean la vista de los mortales sin ayuda. Entre los consumidores, el interfaz vocal robótico de Apple Siri es un compañero de millones de usuarios de iPhone que buscan conocer todo sin tocar un teclado. Nuevas aplicaciones de robot de buddy están en el horizonte. Mercedes Benz enloquecieron IEEEAsistentes de Feria electrónica de consumo con su anuncio de dirección autónoma optó por el conductor en 2013 vehículos
de clase S (Figura 1). Los coches de implementación una estrategia de seguimiento aprobada para velocidades de hasta 40 km/h en tráfico pesado; por lo tanto, superdrivers podrá relajarse y leer su correo electrónico. Si las condiciones de conducción se deterioran demasiado lejos, nuevo sistema de auto inteligencia de mbrace2 Mercedes aplaza llamadas de celular y mensajes de texto. En caso de problemas, mbrace2 se comunica con el mantenimiento de la empresa para el seguimiento y actualizaciones. Finalmente, mbrace2 también instantáneamente advertirá sobre los riesgos de tráfico y carreteras a través de redes de carto-coche. Desde la rehabilitación mundo aparece el nuevo robot Bestic (Figura 2). Este pequeño robot se asemeja a un pequeño pingüino tratando de alimentar a sus crías. El producto tiene una cuchara especialmente diseñada para cuchara alimentos y ofrecerlo a personas que carezcan de la destreza manual para alimentarse. Los usuarios pueden elegir la ubicación recortando a través del teclado o joystick. En el frente militar, Boston Dynamics' nueva Cheetah rompieron el récord de
velocidad de piernas-robot por sincronización a 29 km/h. Como perro grande, el objetivo para un guepardo es servir como una mula de paquete y el pony express para los soldados. Con robots para llevar de todo, desde equipo básico de suministros médicos de emergencia, un solo soldado paquetes de la potencia de una escuadra. La nueva base de Ava de Robot se esfuerza por ser una encarnación física de un asistente de Siri-like. Aunque Ava es aún un prototipo en busca de una aplicación, posee las capacidades fundamentales para un compañero con ruedas: navegación autónoma y recarga, versátil pantalla Monte, direccionable cámara, WiFi, telepresencia, kit de desarrolladores y abundante de i/os. La clave para cualquier aplicación que permite el superhéroe es su interfaz. Por ejemplo, la atención temprana de Intuitive Surgical fue en una interfaz que sea transparente a los cirujanos. Se han gastado muchos dólares DARPA para lograr el mismo objetivo para soldados robots de suelo bajo condiciones de combate de la operación. Siri, matices y otras interfaces vocales son menos intuitivos pero avanzar un paso

más allá del teclado en el sentido de naturalidad.Gesto aproxima a una edad en aplicaciones especializadas donde son comandos limitados y discurso no es una opción viable. Sobre todo, la mayor novedad son las ganancias que están ocurriendo en las interfaces cerebro-máquina (IMC). Las últimas investigaciones en IMC no intentan asignar las vías
existentes del motor.
En lugar de replicar la interfaz de armas naturales de manera igual IMC temprana, los investigadores ahora están implementando poder innato del cerebro para construir mapas del motor. Si un cirujano mueve un brazo háptico o un índice de masa corporal mueve
una protésica, la corteza cerebral, ganglios basales y otras secciones del cerebro rápidamente aprender juntos a operarlo. De hecho, los investigadores de la Universidad de California, Berkeley demostraron que macacos con implantes de cerebro pueden cambiar mentalmente hacia atrás y adelante entre varios conocidos IMC al mismo dispositivo. Estos nuevos descubrimientos, junto con el implante mejor hardware y retroalimentación del sensor táctil, prometen IMC productizeable. Como las capacidades de nuestros compañeros robóticos proliferan, también lo hacen a dilemas éticos. En los Estados Unidos, este año, legislación reciente (modernización de transporte aéreo de FAA y Ley
de mejoramiento de la seguridad, 06 de febrero de 2012) legalizó el uso de aplicación de ley de drones privados menores de 2 kg y a continuación 122 m (Figura 3). Dado que la ley estadounidense requiere un permiso para reunir pruebas dentro de la casa de alguien, surgen muchas preguntas
relativas a la utilización de estos drones con sensores de vigilancia de calor y de la visión. El cultivo legal y ético preguntas circundante policiales robotizada y automatizada, responsabilidad comercial, derechos de android y una plétora de temas relacionados fueron el foco de una nueva Conferencia, "Nos Robot 2012: configuración de la Agenda," patrocinado por la Universidad de Miami escuela de ley en abril. Android derechos abogado, administrador de flota de robot, y CP de tráfico drone puede ser algunas de las muchas nuevas ocupaciones generó como evolucionan nuestras creaciones automatizadas. Como señala el impacto positivo de Robots industriales sobre el empleo (Peter Gorle y Andrew Clive internacional Federación de robótica, de febrero de 2011), las Naciones con más robots tienden a tener menor desempleo que otros. Cool robo-sidekicks apoyará economías de superestrella, aunque ellos desafían la capacidad de las instituciones de la sociedad para mantenerse.
MENSAJE DEL PRESIDENTE (continuación de la pág. 6)
Con esta recomendación en mente, creo que es un momento importante para abordar las varias preguntas que surgen con respecto a la automatización para fortalecer nuestra huella de automatización, y he organizado a un Comité Ad Hoc sobre automatización para hacerlo. Como asesor para la automatización, han pedido Peter Luh para presidir el Comité. El Comité está integrado por individuos capaces de áreas de la automatización y la robótica, con la membrecía como sigue:
- Peter Luh, silla [Fundación a enriquecido en-jefe (EiC) de T-ASE]
- Raja Chatila (Presidente electo)- Ventilador-Tien Cheng
(Presidente de programa para 2014 de caso)
- Ken Goldberg (EiC de T-ASE)- Cecilia Laschi [miembro del
Comité Administrativo (AdCom)]- Raj Madhavan (Vicepresidente
de actividades industriales)- Bradley Nelson (AdCom
miembros)- Satoshi Tadokoro
(Vicepresidente de actividades técnicas) l N. Viswanadham (ex EiC de T-ASE)
- Mengchu Zhou (Presidente del Comité de dirección de caso).
El Comité tiene todos de los actual y pasado CEIs de T-ASE, varios organizadores de la Conferencia de caso y oficiales de RAS y AdCom miembros. Ellos están examinando el estado de automatización dentro de la sociedad y estará haciendo algunas recomendaciones iníciales más tarde este año. En los últimos días se han examinado varias preguntas. ¿Qué es la automatización, y cuál es su relación con la robótica? El alcance del ámbito técnico de la sociedad de interés puede

encontrarse en nuestro sitio Web (www.ieeeras. org; "La sociedad busca avanzar... ") e identifica algunas de las diferencias entre la robótica y la automatización. El Comité está debatiendo esta cuestión y agradecería sus puntos de vista sobre el tema. También se considera otra, tal vez, la cuestión igualmente importante:
¿en qué áreas de la automatización puede RAS hacer sus mayores contribuciones a la comunidad? Se reconoce que la automatización puede abarcar una amplia gama de áreas temáticas, que incluyen pero van mucho más allá de la automatización de fábrica. Es bueno considerar donde RAS
puede tener su mayor impacto, dado su lugar estratégico dentro de la IEEE. Por favor, considere cómo puede ayudarnos a "Nutrir el lado de automatización de la sociedad". Por favor siéntase libre para compartir sus pensamientos con su Comité en [email protected] y Peter Luh.


Formulación de una estrategia nacional de Estados Unidos para
la robótica
La industria de la robótica fue lanzada en Estados Unidos hace 50 años. Desde entonces, la robótica industrial ha ganado mucha popularidad. Actualmente, las empresas japonesas y europeas dominan la robótica industrial. El dominio se ha expandido significativamente para incluir aplicaciones médicas, servicios y estratégicas.En algunas de estas áreas, los Estados Unidos todavía mantiene el liderazgo. Algunas aplicaciones ya están maduros y nuevos surgen todos los días. En los últimos diez años, han surgido nuevos programas de investigación y
desarrollo (i+d). Corea del Sur creó un programa de robótica nacional con un importante apoyo.La Comisión Europea inició un importante programa en sistemas cognitivos. En los Estados Unidos, ha habido un conjunto diverso de programas de robótica financiados por diferentes organismos como la defensa avanzada investigación proyectos Agencia, Instituto Nacional de estándares y tecnología y la Oficina de Investigación Naval. En 2006, era evidente que no hubo ninguna estrategia coordinada de robótica en los Estados Unidos. Para abordar esta cuestión, se reunió un grupo de investigadores senior de la mayoría de las principales instituciones para una reunión de almuerzo en la ciencia robótica y sistemas (RSS) Conferencia en
Atlanta 2007. Se tomó una decisión de formular una hoja de ruta para la robótica en los Estados Unidos para establecer las bases para una estrategia coordinada. Para ello, un proceso se puso en marcha. Se organizaron cuatro talleres diferentes: 1) fabricación y logística, 2) la atención de la salud y robótica médica, robótica de servicio 3) y 4) tecnologías emergentes. Los tres primeros talleres tuvieron un enfoque tópico, y el cuarto fue examinar cuestiones de tecnología push. Para cada taller, hubo una amplia convocatoria de propuestas (dos o tres páginas). Se revisaron las propuestas, y unas 30 personas fueron invitadas a los talleres. Las reuniones tuvieron una mezcla de representantes de la industria, laboratorios de gobierno e investigadores de la Universidad. Ninguna de las reuniones tuvo la asistencia de los directores de programa de los organismos de financiación para evitar el enfoque de cualquier agencia de uno. El proceso para cada taller fue identificar:1) Controladores importantes para el crecimiento2) Identificación de los obstáculos al crecimiento3) Formulación de r & d para superar los obstáculos.La formulación explícita de la relación entre I+d y crecimiento fue fundamental para convencer a otros que nuevos recursos para la investigación pueden tener un impacto en el negocio directo. En paralelo a la elaboración de mapas de carreteras tópicas, tuvo lugar un proceso político. El equipo del almuerzo RSS representados 12 universidades.Los presidentes de la Universidad formaron un Panel de liderazgo nacional, presidido por el
Presidente Jared Cohen, Carnegie Mellon University y Presidente Wayne Clogh (y más tarde, Bud Peterson), Instituto de tecnología de Georgie. A su vez, el liderazgo fue instrumental en la creación de un cónclave del Congreso para la robótica presidido por U.S. congresistas Phil Gingrey y Mike Doyle. El caucus del Congreso logra una participación inicial de 28 miembros del Congreso con una participación equilibrada de ambos lados del pasillo. El cónclave más tarde ha crecido para incluir a los 35 miembros del Congreso. En total, más de 160 personas en toda la industria, laboratorios de Gobierno y académicos participaron en la formulación de la hoja de ruta. El tema principal que salen de los diferentes talleres fue el concepto de robots trabajando en estrecha colaboración con los seres humanos, que se conoce como el concepto de Co-X para compañeros de trabajo, coinhabitants y codefenders. Para lograr esta visión, hay un número de obstáculos en términos de manipulación segura ligero, navegación robusta, interfaces de robot humano eficiente para nonexperts y las tecnologías conexas, tales como percepción robusta, diseño formal, control híbrido, agarrar, HRI y materiales. A través de las tres áreas de fabricación, salud y medicina y las aplicaciones de servicio, se identificaron diez áreas comunes de investigación, como se muestra en la tabla 1. Para cada área, se expuso una agenda de investigación general junto con los objetivos previstos para cinco, diez y 15 años en el futuro. Progresos importantes en cada una de estas áreas serían eliminar los obstáculos para promover el uso de la robótica a través de un gran número de aplicaciones.
Presidente Obama anunció la iniciativa nacional de robótica el 23 de junio de 2011 en un acto celebrado en la Universidad de Carnegie Mellon.



El mapa de carretera detallado fue sintetizado en un informe conjunto, que a su vez fue presentado en el Congreso de los Estados Unidos el 21 de mayo de 2009. Tras la presentación al Congreso, también se hizo posible presentar los resultados a la Oficina de ciencia de la casa blanca y la planificación de la tecnología. Posteriormente, un grupo de administradores de programas a través de la mayoría de las agencias convocadas para acordar la instalación de un programa nacional en robótica. La hoja de ruta está disponible en
http://www.us-robotics.us. Presidente Obama anunció la iniciativa nacional de robótica (NRI) el 23 de junio de 2011 en un acto celebrado en la Universidad de Carnegie Mellon. El anuncio coincidió con el lanzamiento de un importante nuevo programa denominado el Advanced Manufacturing Asociación (AMP) dirigido a revitalizar la industria manufacturera en los Estados Unidos. Es bien sabido que nuevos puestos de trabajo en la fabricación de generan puestos de trabajo adicionales 3,8 en sectores de apoyo, que es el más fuerte
multiplicador de puestos de trabajo para cualquier sector. El programa de AMP es patrocinado en US$ 500 millones por año durante cuatro años, mientras que NRI está patrocinado en un nivel de US$ 65 millones por año. El programa NRI es una empresa conjunta a través de la National Science Foundation (NSF), departamento
de agricultura de Estados Unidos, el National Institutes of Health y la NASA. La primera convocatoria fue a finales de 2011. Más de 400 propuestas en respuesta a la llamada. Hay un fuerte incentivo para participar a las empresas en el programa NRI, y será interesante ver cómo éxito hemos sido en el establecimiento de colaboraciones con empresas industriales como parte del nuevo programa. Se prevé que las decisiones sobre la financiación de parte de NRI (Continua en la pagina 14)
Tabla 1. Zonas comunes de investigación a través de aplicaciones de servicios, salud y medicina y fabricación.
- Arquitecturas y representaciones - Mecanismos novedosos y actuadores de alto rendimiento
- Planificación y control - Percepción- Métodos formales - Sensores de alta fidelidad- Aprendizaje y la adaptación - HRI física- Modelado, simulación y análisis - Robots socialmente interactivos
VIENE EN SEPTIEMBRE - RAS ELECCIONES ADCOM
En septiembre la votación comenzará para la automatización y robótica de IEE miembros de la sociedad para elegir a seis nuevos miembros del Comité Administrativo de la Sociedad. En agosto, la votación de miembros (estudiantes de posgrado y miembros de grado superiores) recibirán sus paquetes de información AdCom electoral entregados a su bandeja de entrada (o correo postal) Si usted solicita con la pizarra de los candidatos, sus biografías y sus declaraciones de posición. La votación está programada para comenzar el 4 de septiembre y será conducido el 15 de octubre. Los miembros pueden votar electrónicamente, por fax o por una boleta postal bajo petición

¿ES BUENO ROS PARA LA ROBÓTICA?
Recientemente escuché la opinión de que un sistema operativo de robot (ROS) es peligroso para la industria y, en particular, perjudicial para monetizar el sector de la robótica de servicio [1]. ROS es una gran y creciente colección de bibliotecas de software de código abierto y herramientas diseñadas para ayudar a las personas a crear aplicaciones de robóticas. El argumento, como articulados por Colin Angle de iRobot, es que ROS "bloqueado, protegido y comercializado". A menos que ROS es estable y seguro, continúa: "no podría utilizarse nunca para soluciones sensibles (defensa, espacio, seguridad)" y "no podría utilizarse nunca en fábricas que no pueden permitirse el tiempo de inactividad de sus robots o de software." Ya he oído sentimientos similares antes en conversaciones privadas, decidí aprovechar esta oportunidad para abordar la cuestión. Podría decirse que ningún equipo tiene más experiencia comercializando robots que iRobot. Habiendo sido en negocios por más de 20 años, iRobot ha probado al menos 15 modelos de negocio y vendió más de 7 millones de robots. Así cuando Colin ángulo pide que cerremos ROS para que no destruimos la industria, vale la pena mirar seriamente sus argumentos y qué acciones podríamos tomar como resultado. Después de todo, en creación de ROS, nuestro objetivo es ayudar a crear una industria y no a destruir una. ¿En primer lugar, lo que significaría "bloquear, proteger y comercializar" ROS? ROS se distribuye bajo la licencia de distribución estándar de Berkeley, haciendo que el código fuente disponible libremente para uso comercial o no comercial. Laboratorios de investigación alrededor del mundo utilizan ROS y contribuyan sus resultados (como código) bajo licencias similares. Una amplia variedad de software está disponible bajo licencias de código
abierto. Algunos de los no se ha beneficiado de la ingeniería de software. Algunos sistemas de código abierto, como ROS, están diseñados para ser estable, sólida, documentado y probado con versiones estables. No es posible unrelease cualquier iniciativa de código abierto. Nadie puede unlicense el software existente (o undocument o lo untest). Una organización como Willow Garage podría dejar de funcionar en ROS, pero que no impedir que otros sigan utilizarla o que contribuyen a ella. ROS es ampliamente usado y creciente porque es valioso para la comunidad de robótica. No hay ninguna manera de borrarlo de la escena mundial en este momento. Además, el hacerlo podría perjudicar a la industria y no evitarlo. Con respecto a la preocupación por el uso de ROS en soluciones altamente sensibles, estoy de acuerdo en que cualquier sistema operativo hacerse estable y seguro antes de la implementación en estos entornos. Pero estas preocupaciones han realizado durante los años sobre el uso de Linux y, más recientemente, Android. Recientes informes de CNN, sin embargo, el Estado que el gobierno estadounidense ha optado por trabajar en Android, precisamente porque el código es abierto y disponible. Así como el sistema operativo Android es movilidad, ROS está diseñado como una marea que se levanta todos los barcos en el mundo de la robótica personal. La robótica es una tarea increíblemente complicada y emprender con éxito requiere una amplia experiencia. Grandes empresas pueden asignar equipos grandes para explorar robótica durante muchos años, pero la mayoría de las empresas no tiene la capacidad de hacer esas inversiones a largo plazo. Laboratorios académicos podrían ser capaces de crear pequeñas empresas, pero el mercado para la robótica personal — aparte de aspiradoras y limpiadores
de piscinas — no es grande o maduro en este punto, por lo que es difícil para los jugadores pequeños hacer inversiones lo suficientemente grandes como para prosperar. Las pequeñas empresas pueden aprovechar ROS, sin embargo, para competir con los esfuerzos de las empresas mucho más grandes. Veamos algunos ejemplos. Empresas de robótica pequeñas como Meka robótica en California, Yujin Robotics en Corea, o Clearpath robótica en Canadá están aprovechando ROS hoy para ofrecer robots en los mercados de investigación y educación. Existe buena evidencia de que muchas nuevas empresas de robótica, algunos todavía en modo oculto, como Rodney Brooks Heartland Robotics, también aprovechará ROS de alguna manera. Recientemente, proveedores de brazo robot como integradores de Yaskawa Motoman y adepto de la tecnología y sistema como el suroeste en el Instituto de investigación; han mostrado interés en la aplicación de la funcionalidad de las ROS para aplicaciones robóticas industriales.En este caso, ROS proporciona un puente entre la comunidad académica y la comunidad de robótica industrial. Por supuesto, para las empresas tratando de funcionalidad de nicho que se incluye en los ROS de mercado, la disponibilidad de una alternativa gratuita es un desafío. Estas empresas pueden competir en apoyo, en calidad (mediante la construcción de una solución que es mejor que lo que está disponible en la versión de código abierto), o mediante un mejor entendimiento de las necesidades de sus clientes. Grupo de Karto del SRI es un ejemplo de este enfoque: sus bibliotecas de localización y cartografía del núcleo están disponibles como open source en ROS, donde el código se beneficia el escrutinio de los desarrolladores de

todo el mundo. En la cima de este núcleo open-source, SRI ofrece interfaces de usuario potente, de navegación integrado de soluciones y soporte a clientes de pago. Regis Vincent del SRI me dijo que está convencido de que ROS está ayudando a la empresa Karto, proporcionando una base común y que hay espacio para el software comercial que trabaja con ROS o compite con componentes ROS.Según Colin ángulo, liberando ROS es "equivale a permitir que el mayor consumidor de gigantes de la electrónica gobble cualquier aplicaciones de mercado masivo y comercializar una les globalmente a bajo costo porque ya tienen (o fácilmente podría aplicar ingeniería inversa) del hardware, podría producir barato, el sistema operativo era gratis cortesía de ROS y el único verdadero costo fue la adquisición de la aplicación." [1] Si bien es cierto que los ROS pueden ayudar a grandes empresas, así como pequeños llevar productos al mercado, el diseño de aplicaciones robóticas es trivial en absoluto, incluso con ROS. Descubrir cómo deberían ser robots y exactamente lo que deben hacer para los consumidores es al menos tan difícil como para resolver los problemas técnicos en robótica. ROS ayuda con este último problema, pero el campo está abierto para soluciones a la antigua. Como Helen Greiner, otro fundador de iRobot, argumenta, "estandarización de software, todo el sistema operativo de Robot y Linux, por ejemplo, le ayudará a foco de los desarrolladores sobre lo práctico.
Esto es un tremendo avance porque ingenieros, especialmente en las universidades de investigación, no tendrán que comenzar la codificación desde el suelo hacia arriba para construir sus propios robots"[2]. De hecho, el punto de ROS es ayudar a organizaciones más pequeñas a obtener productos al mercado sin tener que reinventar toda la tecnología necesaria. Rodney Brooks [3] dice que es difícil que un inversionista de robótica en parte porque "descendente convencional de ingeniería a menudo goes astray desarrollando soluciones sólidas de robóticas". Fundamentalmente, la robótica es difícil porque es una actividad tan compleja, multidisciplinar. ROS ayuda a las empresas a tener éxito al proporcionar una base para construir sobre. Por último, vamos a examinar la cuestión de si la falta de garantías comerciales de ROS perjudicar a la industria. Jan Becker de Bosch me señalado que ROS no está optimizado o diseñado para procesadores integrados y requiere una revisión extensa antes de ponerlas en un producto. El mercado está abierto para las empresas el paso y proporcionar dichos servicios, siguiendo el modelo de negocio de Red Hat Linux, pero ninguna de estas compañías se ha creado todavía. A pesar de esas deficiencias, grupo de Becker está utilizando ROS porque los aspectos positivos, incluyendo poder reutilizar el trabajo de los demás, colaborar más fácilmente con asociados externos en la academia, no prototipado rápido de aplicaciones
robóticas y eficiente desarrollan nueva tecnología propietaria, claramente superan a los negativos. En los años de cuatro y medio desde la introducción de ROS, el extenso número de desarrolladores que han trabajado en el sistema operativo, las más de 2.000 bibliotecas ROS ahora en su lugar, el gran número de robots utilizando ROS y la extensa investigación realizada en entornos académicos y no académicos se ha combinado para validar nuestros instintos que ahora es el momento para un matrimonio de la robótica personal con principios de código abierto.
Referencias[1] F. Tobe. (2012, El 22 de marzo). Blog de IEEE Spectrum. [En línea]. Disponible:http://spectrum.ieee.org/automaton/robotics/robotics-software/ irobot-willow-garaje-debate [2] H. Greiner. (2012, 21 De enero). Tiempo para robots de get real. New Scientist Mag [en línea]. (2848), p. 20. Disponible:http://www.newscientist.com/article/mg21328485.800-time-for-robots-to-getreal.Html [3] R. Brooks. (2012). Discurso en el desafío de innovación de la robótica, 2012. [En línea]. Disponible: http://www.youtube.com/watch?-v=lIRmF6FK8DE & feature=youtu.be [4] M. Millan. (2012, 3 De febrero).Gobierno de Estados Unidos, militar para obtener teléfonos seguros Android. CNN. [En línea].Disponible:http://edition.cnn.com/2012/02/03/tech/mobile/government-android-phones/index.html
________________________________________________________________________________________________________
ACTIVIDADES INDUSTRIALES (continuadas de la página 12)
Será anunciado durante el otoño del 2012. En paralelo a la configuración de la NRI, hay un esfuerzo en marcha para crear una red nacional de robótica que es similar en el ámbito, el espíritu y la organización a la red europea de robótica. La nueva red se denomina Organización Virtual de robótica. La red será responsable de las actualizaciones periódicas a la hoja de ruta nacional
de robótica, mejores prácticas para la transición de los resultados de la academia a la industria y un galardón a la mejor tesis de doctorado de Estados Unidos (el Richard Volz Premio A., presentado por primera vez en la Conferencia de sistemas y ciencia de robótica IEEE en junio de 2011). El esfuerzo para crear un mapa de carretera de robótica nacional fue realizado por
Oliver Brock (anteriormente en la Universidad de Massachusetts), Ken Goldberg (Universidad de California, Berkeley), John Hollerbach (Universidad de Utah), Vijay Kumar (Universidad de Pennsylvania), Matt Mason (Carnegie Mellon University), Maja Mataric (University of Southern California), Allison Okamura (Stanford University), Bill Thomasmeyer (consorcio de

tecnología robótica), Jeff Trinkle (Rensselaer Polytechnic Institute)y Henrik Christensen (Georgia Institute
of Technology) I. El consorcio de la comunidad informática patrocinó el
estudio a través de una subvención de la NSF.


CONTRIBUCIÓN PARA EL FUTURO BIOROBOTSEn los últimos años, los beneficios de biológicamente enfoques inspirados tienen cada vez más evidente en la ingeniería diseño. Aunque el nivel dedetalle puede variar de forma significativa, es ampliamente se acepta que algún tipo de biológico influencia puede mejorar el rendimiento de los sistemas robóticos. Los organismos vivos sonsistemas complejos exhiben una gama de características deseables de ingeniería que han demostrado ser difíciles de realizar usando las metodologías tradicionales de ingeniería.La investigación en este campo tiene éxito técnicas fusionadas de desarrollo de sensores, la inteligencia artificial, la neurociencia,simulación / modelado, y la robótica.Robótica de inspiración biológica se caracteriza por un multidisciplinarioenfoque que apunta a fortalecer la colaboración entre la robótica y los biólogos. La IEEE Robotics and Automation Society (RAS) Comité Técnico (TC) en Biorobotics se formó con el objetivo de proporcionar una foro y la difusión de mecanismo para la interacción entre la diversidad biológica y artificiales (autónoma o semiautónoma) de sistemas y presentar a la biología como una herramienta de aprendizaje para los nuevos paradigmas de ingeniería. Por lo tanto, el alcance de la investigación en biorrobótica abarca dos enfoques principales: 1) la aplicación de conceptos biológicos y estrategias para mejorar las capacidades actuales de Los robots, por ejemplo, extendiendo la flexibilidad del robot y robustez por la adopción de los principios de diseño de los sistemas biológicos y 2) la aplicación de La tecnología robótica avanzada para mejorar las técnicas actuales y metodologías adoptadas por los biólogos.
Un enfoque principal se dará a la comprensión de los principios de la locomoción (en términos de detección, actuación, dinámica, y el control) de los sistemas biológicos en el aire, la tierra y bajo el agua el diseño físico de sus cuerpos, y la organización de su los sistemas sensoriales y nerviosos. Áreas de interés incluyen, pero no se limitan a1) inspirados en la biología arquitecturas de robots.2) la percepción de biomimética, la acción y el comportamiento.3) el cerebro, el aprendizaje y la adaptación.4) Los sistemas neuromecánica5) la dinámica y el control de la locomoción de los sistemas biológicos.6) biológicamente sensorial, actuación, y la retroalimentación.7) simulación / modelización / experimentos de los organismos vivos.8) académica interdisciplinaria (educativo) los currículos de biorrobótica.Actividades recientes en 2007, como un esfuerzo de los copresidentes dehacer una definición más precisa del campo técnico de la TC, el alcance de biorrobótica se ha definido como un campo de investigación que implica el uso de sistemas mecatrónicos para entender los organismos vivos complejos. Este campo puede ser concebida como una conferencia altamente interdisciplinario que reúne a científicos y Los ingenieros de diferentes orígenes para compartir y aprender acerca de las actividades de investigación en este campo de rápido crecimiento. Debido a su enfoque interdisciplinario, en el pasado cuatro años, varios esfuerzos se han comprometido a reducir la brecha entre robótica y biólogos, por ejemplo, a través de la RAS y el IEEE de Ingeniería en Medicina y Biología Sociedad (EMBS).
En 2009, un TC renovado, se propuso que se centró en la aplicación de conceptos biológicos y estrategias para mejorar las capacidades actuales de los robots de un punto de vista tecnológico. Nuestras actividades recientes han incluido una amplia de tutoría y las sesiones especiales en conferencias,revistas especiales de temas y charlas organizados.Un simposio especial en IROS 2011 se llevó a cabo en la celebración de los principales logros en robótica en los últimos 50 años. El simposio fue una foro para presentar las tendencias históricas, actuales y futuras en biológicamente la movilidad robótica inspirada, que es un intento de resumir el nivel actualde conocimiento con respecto a la interacción entre lo biológico y lo artificial sistemas y una evaluación de la biología como herramienta de aprendizaje para la ingeniería de la novela paradigmas. El simposio contó con una sesión plenaria invitada impartida por el Prof. ShigeoHirose de la Universidad de Tokio (ver Figura 1) sobre las tendencias históricas y las cuestiones no resueltas en biorrobótica, el Dr. Nelson Gabriel de Boston Dynamicsel humanoide (PetMan) y quadraped (BigDog) los robots, el profesor Robert Wood, de la Universidad de Harvard en la microfabricación de micro vehículos aéreos, y el Prof. Robert Full, de la Universidad de California en Berkeley sobre la locomoción de insectos y las necesidades actuales en la locomoción robótica.
Otras actividades organizadas por o relacionado con el TCActividades recientes (últimos cinco años) l BioRob 2008, de Scottsdale, 19-2210 2008

la IEEE Transactions on Robotics:Número especial sobre Biorobotics de 2008l Diario del Mecanismo y la teoría de la máquina: Número especial sobre Bioinspirada Mecanismo e Ingeniería, 2008 l ICRA 2008: Taller sobre Biorobotics:Avances de la Investigación, Normas y Educación, en Pasadena, 19 de mayo 2008l IROS 2009: Taller sobre robots inspirados en la biología, St. Louis,10 2009l IROS 2009: Habilitación de plataformas de sensores múltiples modos de movilidad,10 2009l IROS 2011: "50 años de la Robótica" Sesión Plenaria, con el Pleno altavoces Gabriel Nelson (Boston Dynamics), Shigeo Hirose (Universidad de Tokio), Robert completo (Universidad de Berkley), y Robert Wood (Universidad de Harvard)l Número especial de la IEEE / ASME Transacciones de Mecatrónica: Sección enfocada de Mecatrónica bioinspirados, 2012l Número especial de la Revista de Robótica y Mecatrónica: áreas enfocadas Tendencias y futuro de los robots bioinspirados de 2012.
Lista de actividades de extensión fuera de la RAS Control del "Biorobotics y Biomecatrónica" de la Cuarta Conferencia Internacional de Robots Autónomos y agentes, 10-12 de febrero de 2009, Wellington, Nueva Zelanda (IEEE Instrumentación y Medición de la Sociedad)
l de la pista "Biorobotics" de la IEEE / RASEMBS 2008 IEEE Conferencia Internacional sobre Robótica Biomédica y Biomecatrónica, 19-22 de octubre de 2008, en ScottsdalePista l "antropomorfismo", de 17 de CISM-IFToMM Simposio sobre Robot Diseño, Dinámica y Control, 5-9 de julio de 2008, Tokio, Japón
Track "Biorobotics para la longevidad" de la 6 ª Conferencia Internacional de la Sociedad Internacional para la Gerontecnología, 4-6 de junio de 2008, Pisa, Italia l CUCS Distinguido Conferencia: Blake Hannaford, Cirugía a través de Internet, Colombia distinguida serie de conferencias en Informática,17 de septiembre 2007. Los miembros del TC se benefician al obtener información relevante (por ejemplo, acerca de los talleres, la publicación lugares y socios potenciales de colaboración) y los debates de unión de el futuro del campo. Los copresidentes actuales del TC sobre biorobots sonKin-Huat baja, Ravi Vaidyanathan, Jorge Solís, y Justin Seipel. XinyanDeng sirvió como copresidente TC hasta el 2011. Con una serie de actividades futuras y eventos de divulgación, se recomienda encarecidamente a los nuevos miembros a unirse a nuestro grupo. Por favor, póngase en contacto con el profesor K.H. Bajo ([email protected]) para obtener más información o visite el sitio Web de TC en http://tab.ieee-ras.org/committeeinfo. php? TCID = 4.
MANIPULACIÓN MÓVIL

Estamos muy contentos de presentar los primeros Robótica IEEE yAutomation Magazine (RAM) número especial sobre manipulación móvil. Este problema es la culminación de una larga cadena de eventos: el renovado interés académico en la manipulación de móvil a través de laúltima década, el aumento de la disponibilidad de la investigación la manipulación de móviles plataformas, dando como resultado un gran aumento en las publicaciones pertinentes, y una mayor conciencia de los organismos de financiación, incluyendo la National Science Fundación Nacional de Robótica de la Iniciativa, la Avanzada de Defensa Research Projects Agency de (DARPA), la manipulación robusta Autónoma programa, y los sistemas cognitivos y el Programa de Robótica en el Séptimo Programa Marco de la Comisión Europea. Esto motivó que empecemos el Comité Técnico sobre la manipulación de memoria RAM Mobile en el 2010 y armar una instantánea del estado del arte en el móvil la manipulación en este tema de la memoria RAM.La década de 1980 y principios de 1990 vio el nacimiento de un nuevo tipo de robot que combina la movilidad con capacidades de manipulación. Estas manipulaciones móvil plataformas resultó ser un nuevo tipo de robot, y que resultócambiar el juego para la robótica. Todo de una manipulación brusca, fue capaz de salir del espacio confinado del laboratorio de investigación y tuvo que hacer frentelas adversidades de la vida real. Asimismo, en el mundo real, muchos supuestos rutinaria realizada por expertos en robótica no se mantuvo. Como resultado, un número de nuevas
y los desafíos fundamentales se convirtió en aparente. Por ejemplo, en el verdadero mundo, la percepción se convierte en esencialcomo el robot debe adquirir información sobre el mundo para ejecutar tareas con éxito.Para operar con firmeza, que era no suficiente para demostrar más una
habilidad específica, también, los robots tienen para detectar, recuperar y aprender de fracaso. Para lograr un nivel razonable de la autonomía, los robots no pueden ser singlepurpose dispositivos. En su lugar, tienen que exhiben una amplia gama de capacidades autónoma en respuesta a la cambiar el estado del medio ambiente.Los investigadores en el campo de la telefonía móvil la manipulación se dedica a traer capacidades de manipulación en el mundo real. Su investigación tiene como objetivo frente a los retos fundamentales que se derivan de este objetivo. En el sentido más amplio, estos objetivos son aumentar la generalidad tarea de manipulación sistemas mientras que al mismo tiempo relajar los supuestos inherentes y reducir la cantidad de un conocimiento a priorirequerido para realizar la manipulación tareas.Cada artículo en este número especial sobre direcciones de móviles en su manipulación manera, un aspecto específico de esta grancuestionar la manipulación que llamamos móvil.Dietrich et al. describir reactiva, manipulación dinámica, móvil con Justin, un robot humanoide compuesta de una cabeza pan-tilt y un par de torquecontrolled brazos montado encima de un reconfigurable de cuatro ruedas móviles base. Abogan por el uso de alta de ancho de banda base de par-controladores que un seguimiento constante de la seguridad, la física limitaciones, la ejecución de tareas, yla postura, la motivación de su necesidad por la observación de que los entornos humanos
a menudo son modelados y dinámica, requiriendo un robot que reacciona rápidamente.Esto lo logran por medio de la operativa de control del espacio, priorizar y la resolución de tareas mediante la explotación de la redundancia natural proporcionado por muchos grados de libertad de Justin. La contribución clave es la demostración de control rápido, reactivos para el mundo real comprender las tareas. St € uckler et al. detalles de las estrategias utilizado por NimbRo, el ganador de la RoboCup @ Home móvil de la manipulación competencia. El concurso reta robots para demostrar
una sólida integración de reconocimiento de objetos, agarrar,navegación, y la interacción humano-robot.Abogan por el uso de simples, estrategias eficientes y robustos manejado por un motor de comportamiento de alto nivel.Su contribución clave es el diseño de un sistema equilibrado capaz de firmeza operar una amplia gama de condiciones y la rápida adaptación a los cambios escenarios.Vahrenkamp et al. frente al desafío de comprender en el mundo real, uno de los requisitos fundamentales de la manipulación de móviles y de larga data desafíos en robótica. La importante contribución en este artículo es el la integración sinérgica de los algoritmos captar y planificación de movimientos. más bien de depender de un conjunto de precalculadas agarra para un par de mano / objeto, la mayoría de lacomprensión adecuada se determina durante la planificación del movimiento en general. como un resultado, tanto alcance y el movimiento de planificación puede limitar la búsqueda a aquellas regiones de sus respectivos espacios de búsqueda que contener una solución a un combinado problema. Por lo tanto, una combinación de estos dos problemas de búsqueda puede conducir a una reducción del espacio de búsqueda asociado
con el problema combinado. Esto amplía la aplicabilidad de las manos de la planificación mediante la relajación de la exigencia de un conocimiento de los objetos a priori y por haciendo que el proceso de planificación más eficiente.Chitta et al. presentan una variedad de actividades de investigación en Willow Garage orientadas hacia la solución de pick-and-place tareas en ambientes no estructurados y dinámicos. La principal contribución de este trabajo es la integración de varios componentes de software que proporciona la navegación, la percepción y las capacidades de manipulación. Las contribuciones adicionales incluyen el desarrollo de una nueva comprensión de planificación de marco capaz de tratar con la incertidumbre debido a la reconocimiento de objetos y la localización, y una actualización en tiempo real de la representación del medio ambiente.

Este trabajo representa la reciente transición desde el desarrollo aisladoperceptual, agarrar, la manipulacióny la planificación de capacidades para la realización de sistemas integrados capaces de hacer frente a una variedad de tareas. Mediante la integración de varios aspectos de la telefonía móvil la manipulación, la robustez y fiabilidad de los subcomponentes se valida y la interacción entre ellos puede ser más estudiado.Mason enriquece esta edición especial con un verdadero placer: una perspectiva sobre los orígenes de la manipulación del móvil, así como algunas ideas sobre lo que está delante de nosotros.Este artículo revisa los objetivos iniciales y los logros de la investigación robótica, centrándose en los temas de la incertidumbre y la
estructura. Todos los artículos de este número especial de considerar la incertidumbre y apuntar a ambientes no estructurados.Pero en este artículo, Mason analiza lo que significa la incertidumbre y la estructura en la manipulación de móviles.En lugar de la clasificación binaria de costumbre, Mason propone considerar la incertidumbre y la estructura como puntos en un continuo.Por lo tanto, la contribución de este artículo es en el fomento dea los investigadores a tomar ventaja de las lecciones aprendidas en los ámbitos que suelen serconsidera que están fuera del ámbito de la manipulación móvil, como la automatización de fábrica suelo.
Reconocemos la importante contribución realizada por los revisores delos artículos presentados a esta edición especial. Ellos son responsables de laalta calidad de los trabajos que aquí se presenta. Y nuestro agradecimiento más sinceroa Peter Corke, nuestro editor en jefe, que nos dio mucho apoyo, mientras que ponereste problema juntos.Para más información sobre la manipulación de móviles y las actividades conexas,por favor, visite el sitio Web de la Robótica y Automatización IEEE Sociedad de la técnicaComité: http://www.mobilema nipulation.org. Esperamos que usted disfrute de la lectura de los artículos.
Sociedad IEEE de ROBOTICA Y AUTOMATIZACION

CONTROL REACTIVO DE TODO EL CUERPO
Manipulación móvil dinámicoUtilizando un gran númerode los grados de libertad accionados
Como resultado de una intensa investigación lo largo de los últimos decenios, varios sistemas robóticos se están acercando a un nivel de madurez que permite una ejecución de la tarea robusto y seguro en interacción con los humanos y el medio ambiente.Particularmente cuando se considera el envejecimiento de la población, el servicio y hogar robótica está llamada a desempeñar un importante papel en los futuros entornos domésticos.Para proporcionar la capacidad de lograr una gran variedad de tareas con diferentes requerimientos,que parece ser inevitable para equipar el robot con un gran número de grados de la libertad (DOF). Imagínese una aparienciatarea de servicio tan simple como llenar un vaso con agua y colocar sobre una mesa. A variedad de limitaciones tiene que ser tratado con simultáneamente: cuando el líquido se derramó, las colisiones con el medio ambiente deben ser evitados, y la posible interacción con los seres humanos que residen en el área de trabajo el robot tiene que ser manejado adecuadamente.Otro tema importante se refiere a la características de movimiento del manipulador.¿Quién quiere tener un robot de servicio en casa que tiene un comportamiento impredecible en comparación a un ser humano? Sin embargo, imitando comportamiento humano y proyectarlo en un sistema robótico es un gran desafío [1].

Pero más allá de la apariencia, versatilidad y destreza, otro aspecto es muy importante: la seguridad. Como Isaac Asimov afirmó en su primera ley en 1942 [36]: "Un robot no debe dañar a un ser humano o, por inacción, permitir que un ser humano sufra daño. "Además de la aplicación de sofisticadas estrategias para prevenir situaciones de peligro por adelantado, los robot también debe ser capaz de experimentar fuerzas de contacto para reaccionar adecuadamente si una situación física humano-robot se produce [2].Ya sea en películas o en la cobertura de la prensa, sobre todo los robots humanoides se muestran cuando los sistemas robóticos dirigida. Desde un punto de vista de ingeniería, es un gran reto coordinar un número tan grande de DOF(grados de libertad) simultáneamente.Además de los robots humanoides como los de Honda Asimo [3], Robonaut 2 [4], y el robot HRP-2 [5], un variedad de sistemas de ruedas ha sido desarrollado: Justin Rollin [6], Armar-III [7], Twendy-One [8], PR2 [9], por nombrar sólo unos pocos ejemplos. Pero, independientemente de la estructura específica del sistema, el requisito de manejar varios objetivos al mismo tiempo es una propiedad común. Éstos se extienden a partir de características tales como la ejecución precisa de tareas, la colisión prevención, y el cumplimiento de las limitaciones físicas a objetivos de nivel superior (la realización de posturas deseadas o el mantenimiento de la facilidad de manipulación).Sobre la base de la formulación espacio operacional [10], muchos métodos diferentes han sido desarrollados para la planificación y el control reactivo de tales sistemas [11] - [13]. Múltiples tareas se llevan a cabo de forma simultánea en un bípedo robot humanoide en un marco de control de todo el cuerpo incluyendo temas como el control del centro de masa, evasión de obstáculos, y el control de la postura [14]. Brock yKhatib [15] introdujo el marco de las tiras de elástico que permite la ejecución de movimientos previamente planificados en un entorno dinámico. Ellos reactivamente adaptarse a los cambios en el medio ambiente, por ejemplo, cuando un obstáculo se está acercando el manipulador. La mayoría de estas estrategias de control descansa en el diseño de artificial repulsiva / atractiva campos potenciales [16]. Sin embargo, tener un gran número de DOF plantea la cuestión de una resolución de la redundancia adecuada.Sobre todo cuando el potencial de campo basados en estrategias aplicada, el problema de mínimos locales en el caso de competir objetivos es crucial. Una primera técnica por Siciliano y Slotine [17] utiliza la proyección espacio nulo de derivan velocidades conjuntos que ejecutan una tarea de baja prioridad sin molestar a cualquier tarea con mayor prioridad. Sentis y Khatib procedió de manera similar a realizar una jerarquía de primitivas de comportamiento [11]. Otro ejemplo de un la instalación de una jerarquía coherente se pueden encontrar en [18], en donde una medida se impone que indica la viabilidad de un operativo de tareas en el espacio nulo de una mayor prioridad tarea. Este coeficiente puede entonces conducir a una transición cambiando el orden de prioridad en tiempo real. Para integrar unilateral restricciones en una jerarquía, Mansard et al. propuso una ley de control basado en un operador inverso específico así como para facilitar el proceso de activación / desactivación desubtareas [19].
En este artículo se trata de reactiva, dinámica, manipulación movil, tenemos que definir este término en el primerlugar. En este contexto, la reactividad representa la capacidad para a nivel local reacciona en la dinámica de imprevisibles, no modelados y ambientes [16]. La dinámica de
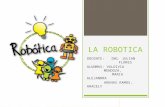
la palabra expresa la características de movimiento del manipulador móvil. Propuestas no se ejecutan lentamente, pero son lo suficientemente rápido tales que los efectos dinámicos tienen que ser considerados debido a su influencia significativa. En la literatura, manipulación móvil está principalmente tratada como un problema estático para ser resueltos en el espacio de configuración de alta dimensión [20].Los efectos dinámicos se tienen en cuenta muy poco [11], [14]. En este trabajo, incorporamos la dinámica del sistema. Por otra parte, no consideramos que las limitaciones físicasen el nivel de planificación [21], pero manejarlas de forma reactiva mediante la utilización de la DP redundante.Este artículo integra los más recientes resultados de la robótica la comunidad en la manipulación de reactivos, controlar móvil dinámico en un marco coherente y da soluciones a los varias preguntas abiertas. El marco propuesto permite demostrar las metodologías en un complejo altamente sistema robótico (ver Figura 1) con una interfaz de control de par a un alto nivel de fiabilidad y rendimiento. La aplicación en un ciclo de 1-ms comprende la simultánea la consideración de nueve tareas reactivas que se integran en una jerarquía de dos niveles básicos. Una subdivisión de la estos dos niveles se realiza para especificar el comportamiento del robot con mayor detalle. Un nuevo desarrollo la pasividad algoritmo basado en para la evitación reactiva de auto-colisiones [22] es presentado e integrado en el control de todo el cuerpo.
concepto. Además, las singularidades dinámicas que describen un problema característico de las plataformas son nonholonomic tratados por la aplicación de métodos se han desarrollado recientemente [23].Los experimentos demuestran la ventaja de una variable huella de la base móvil. Por otra parte, nos centramos en la postura controlar y cómo mantener a la manipulabilidad de los brazos. Además, le damos una breve visión de un nuevo

concepto de la singularidad de proyecciones sólidas espacio nulo [24] que mejora del marco. En trabajos anteriores, hemos demostrado la coordinación entre los dedos y los brazos en términos de reacción a dos manos la manipulación. Aquí la completa robot es controlado utilizando todos DP 51. El cuerpo completo sistema de control de la ejecución de tareas proporciona robusta que se puede definir en el intuitivo, pocas dimensiones cartesiano espacio. Por lo tanto, el tiempo de planificación se pueden guardar de manera significativa.En comparación con los sistemas de admisión controladas, utilizando la interfaz de torsión permite la interacción compatible con el medio ambiente y los seres humanos que reside en el área de trabajo del robot. Una amplia sección experimental demuestra el desempeño de nuestro concepto, la validación de compatible con interacción humano-robot, la ejecución de tareas complejas, y el robot seguridad.
Descripción general del sistemaNuestro robot humanoide consta de un sistema superior del cuerpo, que está montado en un móvil omnidireccional, nonholonomic base (ver Figura 1). Este último tiene una huella variable que es realizado por cuatro patas extensibles en cuyos extremos de las ruedas se colocan. La parte superior del cuerpo controlado por par formado por un torso, dos brazos y dos manos se ve aumentada por una cabeza que está montado en una posición controlada por Pan-tilt unit. A
sistema estéreo cámara de visión está integrada en la cabeza. La estructura cinemática del robot se ilustra en la Figura 2, y en número total de 51 DoF accionada se agrupan por subsistema y control de modo en la Tabla 1.
control de AproximaciónUna visión general de nuestra arquitectura de controlador para la dinámica de todo el cuerpo móvil y la manipulación de sus componentes básicos (en detalle) se presenta en esta sección. En primer lugar, la jointlevel controladores y sus interfaces se presentan. Como garantizar la seguridad es un
requisito fundamental en nuestra estructura, seguimos con características de seguridad antes del tratamiento de restricciones físicas se especifica. Posteriormente, se dará penetración en nuestro enfoque para la ejecución de tareas robusto y las sub-tareas como el mantenimiento de la navegabilidad de los brazos o las conductas deseadas postura. La sección termina con una breve discusión sobre el control de reactivos en general.Capacidades y limitaciones de la reactividad se describen.
Arquitectura general del controladorEl esquema de cuerpo entero el concepto de movimiento [26] se muestra en la Figura 3. Fundamentalmente, se puede dividir la estructura en tres componentes básicos. A la derecha, el modelo de robot se muestra. La parte superior del cuerpo controlado por par y la base móvil velocidad controlada proporcionar mediciones q € R43 y una estimación de la plataforma de odometría Xodo € R3. Un acoplamiento admisión para el móvil la base transforma los pares deseados y de las fuerzas en su caso comandos para el controlador de velocidad de cinemática a la plataforma. En la parte superior en la Figura 3, la lógica de alto nivel es puesto para que incluya la localización, los algoritmos de planificación, y la generación de la trayectoria respecto a la central de los puntos de herramienta (PCT) y las posturas deseadas del robot. En la izquierda, la resolución de redundancia se ilustra para el caso general. En ella, una variedad de nueve tareas simultáneas Se considera que se particulariza en el resto de esta sección.
Diseño de Elección de las subtareasLa pregunta natural que surge es ¿qué criterios son relevantes para la elección y priorización de las adecuadas (sub) tareas? A primera vista, la selección en la Figura 3 (al lado izquierda) puede parecer arbitraria. Sin embargo, se sigue algunas básicas.