
SISTEMA ROBOTICO DE ENTRETENIMIENTO E INTERACCION …
134
SISTEMA ROBOTICO DE ENTRETENIMIENTO E INTERACCION ENTRE HUMANO Y HÁMSTER HAN YU PAVA HUNG UNIVERSIDAD AUTÓNOMA DE OCCIDENTE FACULTAD DE INGENIERÍA DEPARTAMENTEO DE AUTOMATICA Y ELECTRONICA PROGRAMA DE INGENIERÍA MECATRÓNICA SANTIAGO DE CALI 2008
Transcript of SISTEMA ROBOTICO DE ENTRETENIMIENTO E INTERACCION …

SISTEMA ROBOTICO DE ENTRETENIMIENTO E INTERACCION ENTRE HUMANO Y HÁMSTER
HAN YU PAVA HUNG
UNIVERSIDAD AUTÓNOMA DE OCCIDENTE FACULTAD DE INGENIERÍA
DEPARTAMENTEO DE AUTOMATICA Y ELECTRONICA PROGRAMA DE INGENIERÍA MECATRÓNICA
SANTIAGO DE CALI 2008

2
SISTEMA ROBOTICO DE ENTRETENIMIENTO E INTERACCION ENTRE HUMANO Y HÁMSTER
HAN YU PAVA HUNG
Trabajo de grado para optar por el título de Ingeniero Mecatrónico
Director ANDRES FELIPE NAVAS E.
Ingeniero Mecatrónico
UNIVERSIDAD AUTÓNOMA DE OCCIDENTE FACULTAD DE INGENIERÍA
DEPARTAMENTEO DE AUTOMATICA Y ELECTRONICA PROGRAMA DE INGENIERÍA MECATRÓNICA
SANTIAGO DE CALI 2008

3
Nota de aceptación:
Aprobado por el Comité de Grado en cumplimiento de los requisitos exigidos por la Universidad Autónoma de Occidente para optar al título de Ingeniero Mecatrónico.
Ing. Andrés Felipe Navas Director
Ing. Drago Dussich Jurado
Ing. Edwin Rojas Jurado
Santiago de Cali, 27 de noviembre de 2008.

4
AGRADECIMIETOS
Expreso mi mas sincero agradecimiento a mi familia porque de ellos siempre recibí un apoyo sincero e incondicional, además agradezco a todos los que me colaboraron de una u otra forma en la realización de este proyecto. Supongo que en esta página uno puede agradecer a mucha gente y pues…. Lo voy a hacer… gracias a mi mamá que me ayudo muchisisisimo; gracias a mi papá que pago todo… y también me colaboro; gracias a mis abuelos porque cada vez que necesite de su ayuda o de algunos de sus concejos estaban ahí para dármelos; gracias a mi novia Juliana porque me colaboro con todo lo que me podía colaborar; a mi hermano Yat Sen que aunque me criticara todo lo que hacía algo tuve que haber sacado de ahí; a Ivan “el pada” porque ese si me daba ideas buenas y criticas constructivas; a Giovanny Zamorano , por su amistad, sus ideas y su ayuda en la parte de redacción; a Jerimen y a Miguel Vargas , porque con ellos construimos el primer prototipo de RoboCuy® a punta de martillo; a Stephany Berrio , Jorge Benavides, Juan Carlos Burbano, Juan Manuel “el niño”, Jose Perez, personas que me brindaron una ayuda que realmente necesitaba; a Guille Gonzales, quien fue el creador del nombre RoboCuy®; gracias a mi tío Lubin y a Alonsito, que con sus ideas y sus contactos ayudo a que avanzara mucho mi tesis; a Efrain “nariz de fibra” Rodriguez , y a Mauricio Uribe; a Alejo Rendon, Alvaro “el rolo”, Camilo Delgado, Diego Rodas, Felipe “Larra”, Monica Delgado, Gustavo Andrade, Fabian “el panita”, Javier Chavarro, Mario Chavarria, Mauricio “Coyote”, Roger Rios, porque entre la cantidad de bobadas que decían y entre chiste y chiste de todo se saco algo; a mi tío Ernesto en Bogotá, a Penagos , a Vanessita Hernandez, que con su amistad y consejos aporto a la causa; a Oliva, que siempre tuvo que organizar el desorden de mi trabajo; gracias a Andres Navas, Bernardo Sabogal, Jose Fernando Perez, Juanita, que con sus aportes como profesores fueron excelentes…. …. Y a toda la gente que me colaboro…. Estoy seguro que me falta más de uno….
5
CONTENIDO
Pág. RESUMEN 16 INTRODUCCION 17 1. OBJETIVOS 18 1.1. OBJETIVO GENERAL 18 1.2. OBJETIVOS ESPECIFICOS 18 2. PLANEACIÓN DEL PROYECTO 19 2.1 PLANTEAMIENTO DEL PROBLEMA 19 2.2 ESTUDIO DE MERCADO 19 2.2.1 Análisis de encuestas 20 2.2.2. Grupo objetivo (target) 23 2.2.3. Productos similares (Benchmarking) 23 2.2.4. Comercialización y mercadeo 25 2.3. IDENTIFICACION DE LAS NECESIDADES 25 2.4. ESPECIFICACIONES TECNICAS 26 2.5 ANTECEDENTES 27 3. GENERACION DE CONCEPTOS 30 3.1. CAJA NEGRA 30 3.2. DESCOMPOSICIÓN FUNCIONAL 31 3.3. ÁRBOLES DE CLASIFICACION DE CONCEPTOS 31

6
3.4. ANALISIS DE VIABILIDAD DE LOS CONCEPTOS 35 3.5. COMBINACION DE CONCEPTOS 36 3.6. ANALISIS DE CONCEPTOS GENERADOS 37 3.6.1. Concepto A 37 3.6.2. Concepto B 38 3.6.3. Concepto C 39 3.6.4. Concepto D 39 3.6.5. Concepto E 40 4. SELECCIÓN DE CONCEPTOS 41 4.1. MATRIZ DE TAMIZAJE 41 4.2. REVISION Y MEJORA DE CONCEPTOS 42 5. ARQUITECTURA DEL PRODUCTO 43 5.1. DEFINICION DE LA ARQUITECTURA 43 5.2. INTERACCIONES ENTRE ELEMENTOS FISICOS Y FUNCIONALES 43 5.3. DESCOMPOSICIÓN E INTERACCIONES 44 5.4. ESQUEMA DEL PRODUCTO 45 5.5. INTERACCIONES INCIDENTALES 46 5.6. DISTRIBUCIÓN GEOMÉTRICA 46 6. ARQUITECTURA DE SISTEMAS ELECTRONICOS 48 6.1. ANALISIS DEL SISTEMA ELECTRONICO 48 6.2. ESPECIFICACIONES DE COMPONENTES ELECTRONICOS 48 6.2.1. Interruptores externos 48

7
6.2.2. Encoders 48 6.2.3. Sensores Infrarrojos 49 6.2.4. Circuito Lógico 49 6.2.5. Circuito de potencia y Motores 49 7. DISEÑO INDUSTRIAL 50 7.1. ANALISIS DEL DISEÑO INDUSTRIAL 50 7.1.1. Necesidades ergonómicas 50 7.1.2. Necesidades estéticas 51 7.2. NATURALEZA DEL PRODUCTO 51 7.3. EVALUACION DE LA CALIDAD DEL DISEÑO INDUSTRIAL 52 7.3.1. Calidad de las interfaces de usuario 52 7.3.2. Requerimientos emocionales 52 7.3.3. Facilidades de mantenimiento y reparación 52 7.3.4. Uso apropiado de recursos 52 7.3.5. Diferenciación del producto 52 8. DISEÑO PARA MANUFACTURA 54 8.1. ANALISIS DEL DISEÑO PARA MANUFACTURA 54 8.2. LISTADO DE COMPONENTES 54 8.3. DISEÑO PARA MANUFACTURA DE COMPONENTES PROPIOS 56 8.3.1. Carcasa 56 8.3.2. Base y soporte 56 8.3.3. Tarjeta lógica 56

8
8.3.4. Impermeabilizador 56 8.3.5. Decoración externa 56 8.4. PROCESO DE ENSAMBLE 56 8.5. TIEMPO DE ENSAMBLE 61 8.5.1. Índice DPE 61 8.6. ACCIONES PARA EL MEJORAMIENTO DEL PROCESO DE 61 ENSAMBLAJE 9. DISEÑO DETALLADO 63 9.1. DISEÑO MECANICO DE LA ESTRUCTURA DEL ROBOT 63 9.2. TRACCIÓN Y LOCOMOCIÓN 65 9.3. EL MOVIMIENTO DEL RATON 66 9.4. DESECHOS ORGANICOS 68 9.5. SENSORES DE DISTANCIA PARA LA SEGURIDAD 70 9.6. CARCASA 71 9.7. DISEÑO ELECTRONICO 73 9.7.1. Encoders 73 9.7.2. Sensores Infrarrojos 75 9.7.3. Microcontrolador 76 9.7.4. Circuito electrónico 80 9.7.5. Circuito de potencia 82 10. PROTOTIPADO 83 10.1. PRIMER PROTOTIPO 84

9
10.2. PROTOTIPOS DE LA SELECCIÓN DE CONCEPTOS 85 10.3. PROTOTIPO DE LA BASE DE LA ESFERA 86 10.4. CARCASA 87 10.4.1. Prototipo analítico de la carcasa 87 10.4.2. Proceso de fabricación de carcasa en fibra de vidrio 88 10.4.3. Consideraciones finales de la carcasa 91 10.5. PROTOTIPOS DEL SISTEMA ELECTRONICO 91 11. RESULTADOS FINALES 94 12. CONCLUSIONES 96 13. RECOMENDACIONES 97 BIBLIOGRAFÍA 98 ANEXOS 100

10
LISTA DE TABLAS Pág. Tabla 1. Necesidades identificadas 26 Tabla 2. Especificaciones técnicas preliminares 26 Tabla 3. Combinación de conceptos 36 Tabla 4. Matriz de tamizaje 41 Tabla 5. Interacciones de la arquitectura modular 43 Tabla 6. Listado completo de componentes 54 Tabla 7. Pasos para el ensamble del modulo de tracción 57 Tabla 8. Pasos para el ensamble del modulo de soporte de esfera 57 Tabla 9. Pasos para ensamble del modulo de sensores infrarrojos 58 Tabla 10. Pasos para ensamble completo del robot 59 Tabla 11. Especificaciones tecnicas de los motorreductores 65 Tabla 12. Especificaciones técnicas de los encoders S1-1024 74 Tabla 13. Especificaciones técnicas de los sensores SHARP 75 GP2Y0A21YK0F Tabla 14. Especificaciones técnicas del microcontrolador PIC18F2520 78 Tabla 15. Especificaciones técnicas del driver dual VNH2SP30 82

11
LISTA DE ILUSTRACIONES
Pág. Ilustración 1. Encuesta: que espera de un juguete? 20 Ilustración 2. Encuesta: tiene mascota? 21 Ilustración 3. Encuesta: acerca de mascotas roedoras 21 Ilustración 4. Encuesta: porque no quiere un roedor como mascota? 22 Ilustración 5. Encuesta: compraría usted el dispositivo? 22 Ilustración 6. Discovery Remote Control Roboquad 24 Ilustración 7. Moto para hámster 24 Ilustración 8. RoboCuy, primer prototipo 27 Ilustración 9. Robot controlado por una cucaracha 28 Ilustración 10. Diagrama de caja negra 30 Ilustración 11. Descomposición funcional 31 Ilustración 12. Árbol de clasificación: Energía externa 32 Ilustración 13. Árbol de clasificación: Sensar movimiento del ratón 33 Ilustración 14. Árbol de clasificación: Sensar señales externas 33 Ilustración 15. Árbol de clasificación: Procesamiento de señales 34 Ilustración 16. Árbol de clasificación: Transmisión 34 Ilustración 17. Árbol de clasificación: Locomoción 34

12
Ilustración 18. Concepto A 37 Ilustración 19. Concepto B 38 Ilustración 20. Concepto C 39
Ilustración 21. Concepto D 40 Ilustración 22. Concepto E 40 Ilustración 23. Diagrama de descomposición e interacciones 44 Ilustración 24. Esquema del producto 45 Ilustración 25. Interacciones incidentales 46 Ilustración 26. Distribución geométrica 47 Ilustración 27. Funcionamiento de un encoder incremental 49 Ilustración 28. Clasificación de la necesidad ergonómica del producto 50 Ilustración 29. Clasificación de la necesidad estética del producto 51 Ilustración 30. Naturaleza del producto 51 Ilustración 31. Clasificación de la diferenciación del producto 53 Ilustración 32. Explosionado del modulo de tracción 57 Ilustración 33. Explosionado de modulo de soporte de esfera 58 Ilustración 34. Explosionado de modulo de sensores infrarrojos 59 Ilustración 35. Explosionado del robot por modulos 60 Ilustración 36. Movimiento de un sistema tipo triciclo 63 Ilustración 37. Disposición de las llantas para el movimiento del robot 64

13
Ilustración 38. Forma y medidas principales de la base 64 Ilustración 39. Simulación del modulo de tracción 66 Ilustración 40. Funcionamiento interno de un mouse 67
Ilustración 41. Simulación del soporte de la esfera con base para encoders 68 Ilustración 42. Sistema de desechos orgánicos 69 Ilustración 43. Deposito extraíble de desechos orgánicos 70 Ilustración 44. Posición de los sensores 71 Ilustración 45. Forma de la carcasa 72 Ilustración 46. Prototipo virtual de la carcasa 73 Ilustración 47. Encoder incremental US-Digital S1-1024 74 Ilustración 48. Curva de comportamiento del sensor SHARP- 76 GP2Y0A21YK0F Ilustración 49. Caja negra de sistema de microcontrolador 76 Ilustración 50. Diagrama de Flujo para el software del microcontrolador 77 Ilustración 51. Diagrama de pines del microcontrolador PIC18F2550 78 Ilustración 52. Circuito y recomendaciones para el Cristal. 80 Ilustración 53. Circuito del Master Clear o Reset 81 Ilustración 54. Driver dual VNH2SP30 82 Ilustración 55. Tipos de prototipo realizados 83 Ilustración 56. Primer prototipo incompleto 84

14
Ilustración 57. Primer prototipo 85 Ilustración 58. Prototipos de la selección de conceptos 85 Ilustración 59. Primer prototipo físico del soporte de la esfera 86 Ilustración 60. Prototipo analítico del soporte de la esfera 86
Ilustración 61. Prototipo físico del soporte de la esfera 87
Ilustración 62. Prototipo analítico de la carcasa. 87 Ilustración 63. Molde en icopor de la carcasa sin terminar. 88 Ilustración 64. Proceso de realización de mezcla para la fibra de vidrio. 89 Ilustración 65. Carcasa sin pulir 90 Ilustración 66. Prototipo final de la carcasa en fibra de vidrio 90 Ilustración 67. Simulación del circuito utilizando 2 micros AT89C52 91 Ilustración 68. Prototipo físico electrónico del circuito para dsPIC 92 Ilustración 69. Simulación 3D del circuito lógico 93 Ilustración 70. Prototipo virtual del Robot 94 Ilustración 71. Foto del robot construido completamente funcional 95

15
LISTA DE ANEXOS
Pág. Anexo A. Manual de usuario 100 Anexo B. Planos para piezas del robot 111 Anexo C. Planos eléctricos 131

16
RESUMEN
En este documento se muestra el proceso de diseño y desarrollo de un robot móvil orientado al sector del entretenimiento humano a manera de juguete. Se expone el estudio previo de mercado realizado para su dimensionado, mostrando las tendencias de los posibles clientes sus necesidades y requerimientos. A partir de esto, se muestra el proceso de diseño Mecatrónico cumpliendo con sus diferentes fases, el cual se cumplió en su totalidad obteniendo el diseño del robot con amplios criterios para el proceso de manufactura, ensamble y diseño industrial. Se explica también el diseño detallado de cada una de las piezas y elementos del sistema y a través de la selección de conceptos, se muestra el porqué del uso de cada uno de ellos, explicando clara y concisamente la elección realizada. Adicionalmente se explica el diseño de los sistemas electrónicos detalladamente, mostrando cada uno de los elementos que ahí intervienen, analizando su diseño y explicando su funcionamiento. Se muestran también los planos del sistema electrónico y los diagramas de flujo necesarios para el claro entendimiento de su funcionamiento. Se muestran los prototipos realizados y las pruebas de laboratorio llevadas a cabo que aportaron en gran medida a la realización del proyecto ya que con ellas se tomaron medidas de corrección para su buen desempeño final. Se incluye además el manual de usuario, diseñado para que el cliente o usuario final haga un buen uso del robot, en donde se muestran algunas conexiones, instrucciones de uso, recomendaciones, planos, instructivos de seguridad y todo lo referente al uso del producto. Finalmente se muestran los planos del diseño, así como la arquitectura de sus tarjetas electrónicas y los subsistemas empleados.

17
INTRODUCCION
Un ratón o hámster andando por la casa o por un área determinada, en un vehículo manejado por el mismo, sin que ensucie el piso, alfombras o tapetes, sin que haga daños, sin que se pierda y de una manera segura tanto para el hámster como para el usuario, es una idea que por lo novedosa y lo útil, garantiza la atención de una gran cantidad de público en el mercado, aumentando la probabilidad de éxito de este producto. Con este proyecto, se pretende implementar los conocimientos en las áreas de robótica, informática, mecánica, control e instrumentación, para desarrollar un juguete que utilice mecanismos tanto eléctricos como mecánicos y electrónicos para brindar la posibilidad de interacción entre un ser humano y su hámster (mascota), proporcionando diversión y entretenimiento de una manera ágil, segura y novedosa para ambos. Además de ingresar un nuevo producto al mercado con grandes características de entretenimiento, también abre un campo al desarrollo de nuevas tecnologías en la bio-robótica móvil usando como principales controladores o CPUs, animales vivos capaces de tomar decisiones, basados en sus sentidos o “instintos”, que una computadora nunca podrá tomar y llegando a áreas imposibles para un ser humano.
18
1. OBJETIVOS 1.1. OBJETIVO GENERAL Diseñar e implementar un robot móvil como sistema de entretenimiento novedoso, divertido y seguro que involucre una interacción entre un hámster y uno o varios seres humanos. 1.2. OBJETIVOS ESPECIFICOS Implementar tecnología de punta aplicada a la juguetería, bajo un concepto hibrido (Biológico-Mecatrónico) para entretenimiento. Brindar comodidad al hámster. Proporcionar una alternativa para que el hámster se ejercite.

19
2. PLANEACIÓN DEL PROYECTO 2.1 PLANTEAMIENTO DEL PROBLEMA El entretenimiento es una necesidad universal, actividades de recreación, ocio y esparcimiento son necesarias en todo ser humano. En muchas ocasiones, los dueños de mascotas buscan distintos métodos para divertirse o entretenerse con sus animales y muchos de ellos compran artículos para este fin. Esta situación no sólo se da con perros y gatos, sino también con ratones, pájaros y demás animales domésticos. Un hámster necesita de ejercicio diario para su buen estado de salud, ejercicios como la rueda estática o caminar por la jaula pueden convertirse en monótonos tanto para el hámster como para el dueño. En el caso de los roedores, los dueños generalmente no interactúan con ellos por asco, miedo a ser mordidos, posibles daños en la casa o por peligro a que el animal se escape. Se requiere de un dispositivo que facilite la interacción entre la mascota y su dueño, que proporcione entretenimiento a ambas partes y además sea un método alternativo de ejercicio para el hámster. 2.2 ESTUDIO DE MERCADO Se realizó un estudio de mercado basado en 2 encuestas a nivel local, en donde se analizó principalmente las preferencias al comprar un juguete, gustos respecto a la tenencia de mascotas y la edad de preferencia para el producto. A su vez se realizó un análisis de los productos que posiblemente puedan presentar competencia (Benchmarking), registrando sus precios y características similares, importante al momento de definir el precio del producto y utilizado en el análisis de calidad como punto de comparación.

20
Finalmente se diseño un método de comercialización y mercadeo del producto, el cual muestra los lugares en que el producto puede ser vendido, así como los métodos que se deben emplear para su publicidad y mercadeo. 2.2.1 Análisis de encuestas. A continuación se muestran algunos de los resultados arrojados por las 2 encuestas realizadas, analizando sus variables y posibles implicaciones con el desarrollo del proyecto. La primera encuesta se realizo en algunas jugueterías de la ciudad, preguntando a 100 padres de familia cual era la preferencia al momento de elegir un juguete para sus hijos, arrojando esto como resultado los siguientes datos. Ilustración 1. Encuesta: que espera de un juguete?
ENCUESTA
55
79
31
58
49
33
83
40
0
10
20
30
40
50
60
70
80
90
Didactico Novedoso Genere Responsabilidad
Atractivo Mascota Economico
Seguro No Belico
Estos resultados brindan una gran información acerca de lo que el cliente realmente quiere y espera de un juguete. Se puede observar que la seguridad y lo novedoso son aspectos muy relevantes, en el momento de comprar un juguete, también se observa en el grafico que al aspecto económico no le han dado un gran importancia, esto, debido a que siendo un juguete ideal para un hijo, el precio puede variar dependiendo del juguete.

21
En la segunda encuesta cuya población muestra fueron 100 jóvenes universitarios de edades entre los 19 y 25 años de la universidad Autónoma de Occidente, se analizaron distintos puntos de interés en este proyecto acerca de las mascotas y criterios de los estudiantes acerca de estas. Ilustración 2. Encuesta: tiene mascota?
Tiene mascota?
56%36%
8%
Tienen mascota
No tienen mascota
no sabe/no responde
Al preguntar si la persona encuestada poseía mascota, se encontró que mas del 50% de la población encuestada respondió afirmativamente a la tenencia de mascota, esto indica que la preferencia de los jóvenes universitarios de la UAO es a tener un animal de compañía en la casa ya sea por afecto, por seguridad, por gusto o por entretenimiento. Este resultado abre un gran panorama de posibilidades debido a que el porcentaje de personas con mascota es muy alto, por tanto un producto que salga al mercado, cuyo fin sea interactuar con estas tendría una muy buena acogida. Ilustración 3. Encuesta: acerca de mascotas roedoras
Si tienen mascota pero:
11%
86%
3%
Quieren tener unroedor
no le interesa tenerroedor
no sabe/no responde
22
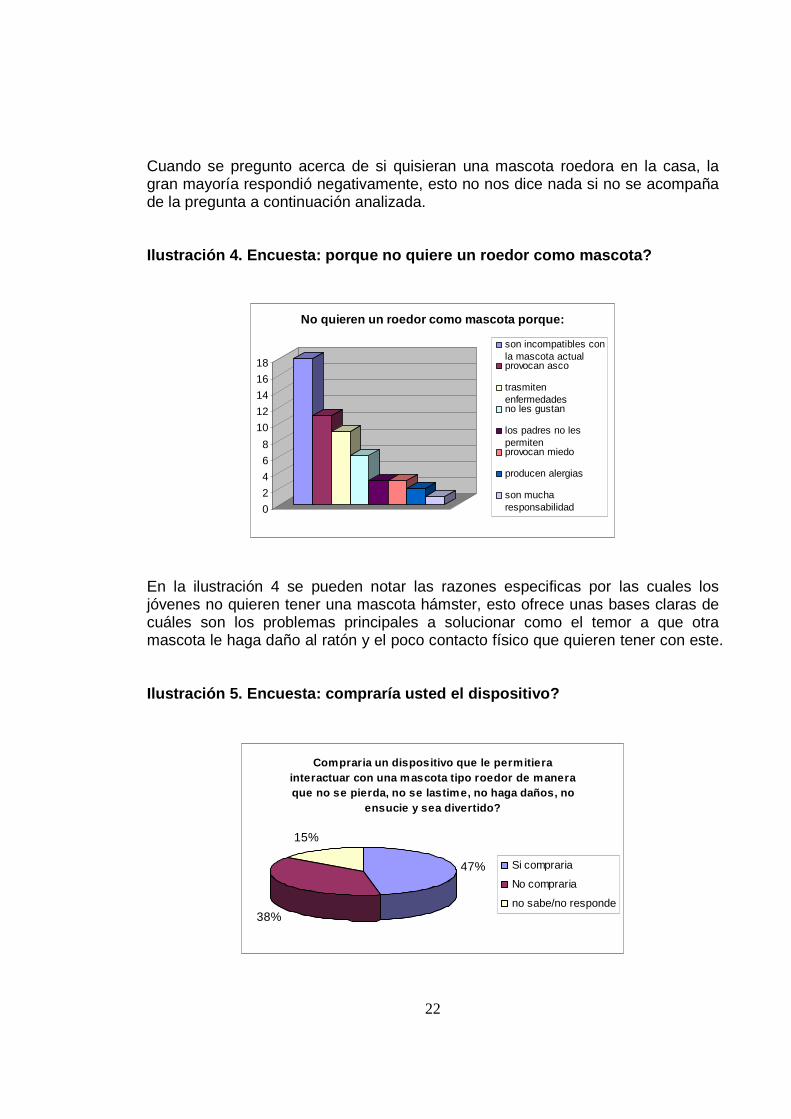
Cuando se pregunto acerca de si quisieran una mascota roedora en la casa, la gran mayoría respondió negativamente, esto no nos dice nada si no se acompaña de la pregunta a continuación analizada. Ilustración 4. Encuesta: porque no quiere un roedor como mascota?
0
2
4
6
8
10
12
14
16
18
No quieren un roedor como mascota porque:
son incompatibles conla mascota actualprovocan asco
trasmitenenfermedadesno les gustan
los padres no lespermitenprovocan miedo
producen alergias
son mucharesponsabilidad
En la ilustración 4 se pueden notar las razones especificas por las cuales los jóvenes no quieren tener una mascota hámster, esto ofrece unas bases claras de cuáles son los problemas principales a solucionar como el temor a que otra mascota le haga daño al ratón y el poco contacto físico que quieren tener con este. Ilustración 5. Encuesta: compraría usted el dispositivo?
Compraria un dispositivo que le permitiera interactuar con una mascota tipo roedor de manera que no se pierda, no se lastime, no haga daños, no
ensucie y sea divertido?
47%
38%
15%
Si compraria
No compraria
no sabe/no responde

23
Como conclusión con los anteriores resultados se observa que la mayor parte de la población encuestada tiene mascota (Ilustración 2), sin embargo a muy pocos les interesa tener un roedor como mascota (Ilustración 3) por diversos motivos (Ilustración 4) que se pueden tomar en cuenta como necesidades del cliente al diseñar el dispositivo, ya que aun así, un porcentaje bastante representativo de la población encuestada respondió afirmativamente al plantear la posibilidad de adquirir un dispositivo que disminuya estos motivos (Ilustración 5). 2.2.2. Grupo objetivo (target). El producto esta dirigido principalmente a niños desde 7 a 15 años como usuarios finales. Por sus características robóticas y partes eléctricas no seria conveniente que un niño pequeño lo usara. En general, el dispositivo debe ser entretenido tanto para niños como jóvenes y adultos. El cliente comprador debe tener alto poder adquisitivo porque es un bien superior, por tanto su comercialización deberá hacerse enfocada a los estratos 4, 5 y 6. Es un producto que no tiene antecedentes, es llamativo, novedoso, entretenido e interesante, por tanto puede ser fácilmente comercializable a nivel internacional, sin embargo para el proyecto será dimensionado solo a nivel nacional 2.2.3. Productos similares (Benchmarking). Como tal no se conoce de un producto que supla las mismas necesidades, pero por separado hay tanto juguetes para la mascota, como juguetes robóticos bio-inspirados para los humanos. En cuestión de juguetes electrónicos, los hay de gran variedad en precios y con mucha diversidad de funciones. Como para tener una referencia, a continuación se listan algunos precios (en pesos colombianos) de juguetes electrónicos en el mercado: - AIBO®: $1’255.000 - Discovery Remote Control Roboquad: $180.000 - Flytech ™ Dragonfly: $90.000 - Radio Control Arthropods: $60.000 - Meccano Spyke Wi-Fi Spy Robot: $650.000 - Furby® : $70.000 - Biomic Soldier: $170.000

24
Ilustración 6. Discovery Remote Control Roboquad Fuente: Discovery Remote Control Roboquad [En Linea] US: Discovery Store, 2007 [consultado 28 de julio de 2008] Disponible en internet: http://shopping.discovery.com/holiday_gifts.htm En cuestión de accesorios para hámster se hizo una lista detallada de los accesorios a la venta en dos tiendas de Cali especializadas en mascotas: - Jaula metálica pequeña: $32.000 - Jaula metálica grande: $50.000 - Jaula en acrílico pequeña: $150.000 - Jaula en acrílico grande: $230.000 - Moto para hámster: $55.000 - Esfera para caminar: $25.000 Ilustración 7. Moto para hámster Fuente: Moto para hámster [En Linea] Madrid: Daniel Gonzalez, 2008 [consultado el 3 de marzo de 2008] Disponible en internet: http://www.nopuedocreer.com/quelohayaninventado/565/motocicleta-para-hamsters/

25
2.2.4. Comercialización y mercadeo. El juguete se puede encontrar en dos categorías: accesorio para la mascota y de entretenimiento. Esta clasificación representa un amplio espectro en cuanto a los posibles puntos de venta desde los cuales se comercializara. Inicialmente se puede distribuir desde tiendas de mascotas como accesorio; ubicado junto a las mascotas que pueden usar el dispositivo. De la misma manera se puede comercializar desde tiendas de novedades, jugueterías y almacenes de cadena que tengan una sección de juguetería o para mascotas. A manera de mercadeo, se propone crear una campaña de expectativa por medios de comunicación masiva un mes antes de poner en venta oficialmente el producto, esto para generar curiosidad en las personas y ganas de adquirir el producto aun desconociendo de que se trata. Se planea hacer un lanzamiento del producto a nivel nacional, poniendo a la venta al mismo tiempo el producto en tiendas de mascotas, jugueterías y almacenes de cadena de todo el país. Para la venta del juguete, se planea usar el siguiente material POP: Dummys o inflables a la entrada de los almacenes de manera muy llamativa que resuelva la curiosidad de las personas sobre el juguete e incite a la compra de este. Floor grafics indicando la ubicación del producto en las jugueterías. Afiches explicativos con información completa del producto En la introducción del producto al mercado, se planea además entregar souvenirs a los clientes, estos consistirán en hámster para generar una mayor atracción del producto. 2.3. IDENTIFICACION DE LAS NECESIDADES Las necesidades fueron abstraídas de los resultados de encuestas previamente presentadas y de entrevistas con profesores relacionados con las áreas
26
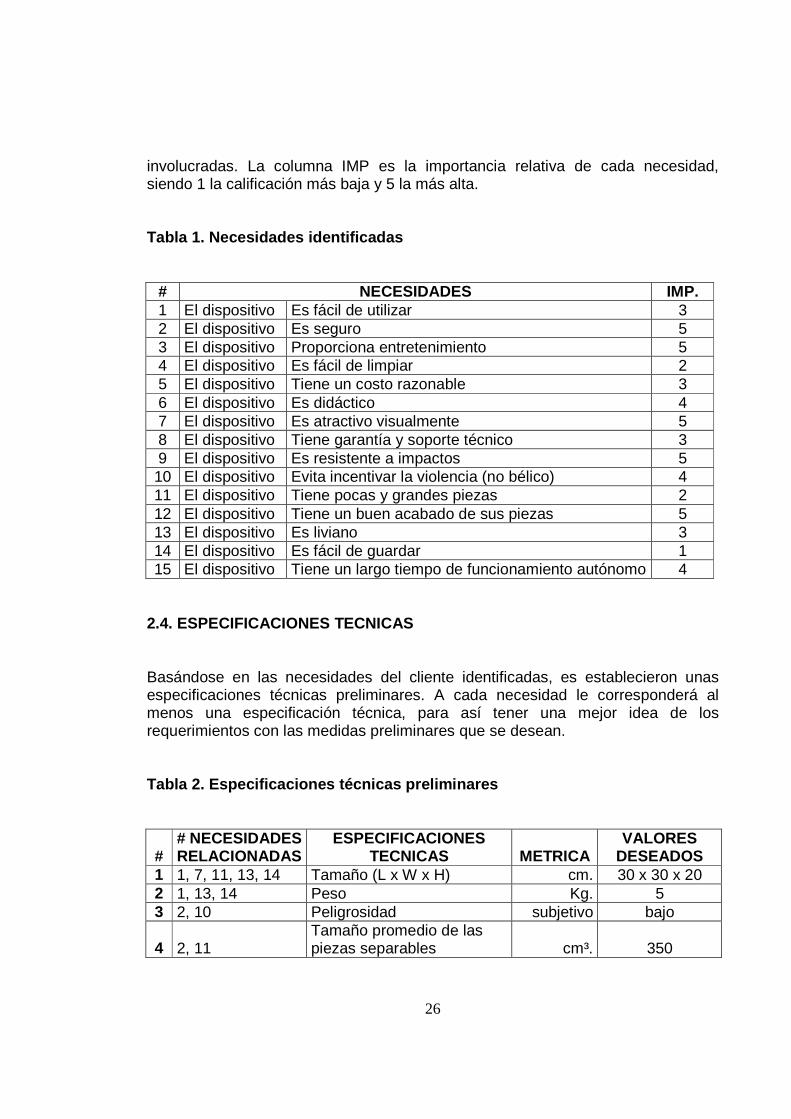
involucradas. La columna IMP es la importancia relativa de cada necesidad, siendo 1 la calificación más baja y 5 la más alta. Tabla 1. Necesidades identificadas
# NECESIDADES IMP. 1 El dispositivo Es fácil de utilizar 3 2 El dispositivo Es seguro 5 3 El dispositivo Proporciona entretenimiento 5 4 El dispositivo Es fácil de limpiar 2 5 El dispositivo Tiene un costo razonable 3 6 El dispositivo Es didáctico 4 7 El dispositivo Es atractivo visualmente 5 8 El dispositivo Tiene garantía y soporte técnico 3 9 El dispositivo Es resistente a impactos 5 10 El dispositivo Evita incentivar la violencia (no bélico) 4 11 El dispositivo Tiene pocas y grandes piezas 2 12 El dispositivo Tiene un buen acabado de sus piezas 5 13 El dispositivo Es liviano 3 14 El dispositivo Es fácil de guardar 1 15 El dispositivo Tiene un largo tiempo de funcionamiento autónomo 4
2.4. ESPECIFICACIONES TECNICAS Basándose en las necesidades del cliente identificadas, es establecieron unas especificaciones técnicas preliminares. A cada necesidad le corresponderá al menos una especificación técnica, para así tener una mejor idea de los requerimientos con las medidas preliminares que se desean. Tabla 2. Especificaciones técnicas preliminares
# # NECESIDADES RELACIONADAS
ESPECIFICACIONES TECNICAS METRICA
VALORES DESEADOS
1 1, 7, 11, 13, 14 Tamaño (L x W x H) cm. 30 x 30 x 20 2 1, 13, 14 Peso Kg. 5 3 2, 10 Peligrosidad subjetivo bajo
4 2, 11 Tamaño promedio de las piezas separables cm³. 350

27
5 2, 3 Velocidad metros/seg 0.5 6 2, 9, 11 Fragilidad subjetivo media 7 3, 6 Interactividad subjetivo media 8 4, 8 Impermeabilidad porcentaje 90 9 4, 11, 14 Cantidad de módulos entero 5 10 5 Costo pesos 300000 11 7, 12 Atractivo subjetivo alto 12 8, 9 Soporte meses 24 13 8, 9 Garantía meses 12
14 1, 11 Cantidad de piezas separables entero 4
15 7, 12 Acabado de las piezas subjetivo alto 16 15 Alimentación voltios 7.2 17 15 Autonomía de energía minutos 30 2.5 ANTECEDENTES En anteriores semestres se tuvo una experiencia desarrollando un robot móvil para una competencia de robots busca-minas. Este robot, tenía como principal procesador un ratón. El proyecto fue conocido como “RoboCuy”. Ilustración 8. RoboCuy, primer prototipo
De esta experiencia se puede tomar valiosa información en detalles y problemas que se hayan presentado para que no vuelvan a ocurrir, además de conceptos y una mejor valoración de las soluciones a implementar.

28
Muchos juguetes se encuentran hoy en día en el mercado que involucran la interacción con humanos y tienen una parte robótica o lo son completamente, sin embargo hasta ahora no se ha visto uno que interactúe con una mascota o mejor, que la mascota interactúe con él. Es por este motivo, que el proyecto es algo novedoso que espera impactar en el mercado. Robots como el AIBO de Sony, imitan comportamientos animales, estos pueden tener costos que oscilan entre 150 y 3000 dólares. Actualmente en la Universidad de California Estados Unidos, se lleva a cabo un proyecto de investigación en la creación de un robot controlado por una cucaracha. Este proyecto es relativamente parecido, sin embargo sus fines son netamente académicos. Ilustración 9. Robot controlado por una cucaracha
Fuente: HERTZ, Granet. Cockroach Controlled Mobile Robot. [En Linea] California: ConceptLab, 2008 [consultado el 2 de agosto de 2008]. Disponible en Internet: http://www.conceptlab.com/roachbot/

29
El proyecto es presidido por el ingeniero Garnet Hertz y pretende crear un sistema pseudos-inteligente con una cucaracha de Madagascar como su CPU. El proyecto en la actualidad es un robot de 3 ruedas con sensores de proximidad que le dan una retroalimentación visual a la cucaracha, está se mueve encima del robot en un dispositivo con una pelota de ping-pong equipada con sensores que a su ves envían información que es procesada para el movimiento del robot. Un grupo de investigación de la universidad de Case Western Reserve en Ohio, Estados Unidos que desarrolla tecnologías respecto a robots bio-inspirados, de donde se pueden abstraer varios modelos de locomoción que se basan principalmente en la manera como los insectos se desplazan. En este grupo de investigación han desarrollado robots que simulan el comportamiento de cucarachas, grillos, hormigas, mariposas, libélulas, entre otros.

30
3. GENERACION DE CONCEPTOS En esta sección primero se descompone el sistema para facilitar su visualización y entendimiento, después se analiza cada partición o modulo identificado para buscar la solución que mejor responda a los requerimientos del cliente y especificaciones técnicas planteadas. Esto se lleva a cabo recolectando información, tanto en el grupo de trabajo, como en fuentes externas, con el animo de tener el mayor numero de alternativas y con esto una solución mas adecuada. 3.1. CAJA NEGRA Para este punto se analiza todo el sistema como un solo proceso en donde solo se tienen en cuenta las entradas y las salidas. Esto facilita en gran medida la comprensión del problema y su posterior descomposición funcional. Ilustración 10. Diagrama de caja negra
ROBOT
Energía
Movimiento del ratón
Señales externas
Movimiento
Entradas Salidas
Excreciones

31
Energía
Movimiento del ratón
Señales Externas
Velocidad/ Dirección
Aceptar energía externa
Sensar la señal
Sensar movimiento
Procesamiento de señales
Etapa de potencia Transmisión
Locomoción
Excreciones del hámster
3.2. DESCOMPOSICIÓN FUNCIONAL Teniendo la caja negra del proceso, se procede a analizar las relaciones entre las entradas y las salidas, el proceso que se debe seguir para que teniendo las entradas mencionadas, las salidas sean las deseadas, haciendo un diagrama que muestra cada una de las sub-funciones que debe realizar el dispositivo. Ilustración 11. Descomposición funcional Esta descomposición ayuda a la correcta visualización de cada proceso a realizarse y permite tener una mayor claridad de que es lo que se debe hacer para después pasar a analizar el cómo se debe hacer. Este diagrama es la base para generar los conceptos que se usaran finalmente en la construcción del robot. 3.3. ÁRBOLES DE CLASIFICACION DE CONCEPTOS Para cada elemento observado en la descomposición funcional, se analizaron posibles soluciones para su aplicación, esto se realizo buscando en la bibliografía, haciendo ingeniería inversa a otros productos, preguntando a expertos y con los conocimientos adquiridos a través de la universidad.

32
Este proceso ayuda en la posterior selección y refinamiento de conceptos debido a que entre más conceptos se generen, se tendrá una mayor posibilidad de éxito y optimización del producto. El primer ítem que se analizo fue la aceptación de energía, el sistema debe ser alimentado de tal manera que pueda trabajar su sistema de control, y su sistema de potencia de manera autónoma. Ilustración 12. Árbol de clasificación: Energía externa
También se tuvo en cuenta el sensado del movimiento del ratón, ya que este será el principal procesador del robot, para lo cual se propusieron varias ideas, en algunas de las cuales se hace necesario el uso de encoders.
Aceptar energía externa
Solar
Combustible
Gas
Gasolina
Metanol, aceite, nitro metano
Alkalinas
Batería
Recargables
níquel cadmio
polímero de litio
níquel-hidruro metálico

33
Ilustración 13. Árbol de clasificación: Sensar movimiento del ratón
El sensado de señales externas se debe ocupar principalmente de la seguridad del ratón respecto a obstáculos y elementos del camino, debe tenerse una idea del entorno en que se encuentra. Para esto se propuso: Ilustración 14. Árbol de clasificación: Sensar señales externas
Tanto el movimiento del ratón como las señales externas, deben ser procesados para tener un control sobre los actuadores.
Sensar señales externas
Contactos
Ultrasónicos
Infrarrojos
Inductivos
Capacitivos
Sensar movimiento
Esfera con ratón adentro
Caja con ratón adentro
Bandas transportadoras ratón encima
Cilindro

34
Ilustración 15. Árbol de clasificación: Procesamiento de señales
En los actuadores para la transmisión, se requiere que el robot se mueva, que cambie la energía eléctrica a energía cinética, para esto se puede contar con los elementos mostrados en la siguiente ilustración. Ilustración 16. Árbol de clasificación: Transmisión
Finalmente, como opciones de locomoción se tienen patas, orugas y llantas. Ilustración 17. Árbol de clasificación: Locomoción
Locomoción
Patas
Orugas
Llantas
Transmisión
Motores DC
Motor Paso-Paso
Motores AC
Procesamiento de señales
Microprocesador Microcontrolador
Programador Lógico Controlable (PLC)
Procesador Digital de Señales (DSP)

35
3.4. ANALISIS DE VIABILIDAD DE LOS CONCEPTOS La selección de conceptos nos basamos en criterios absolutos para la valoración individual de los conceptos, antes de valorarlos en forma conjunta; y de esta manera reducir el número de combinaciones. A continuación se analizan uno a uno los conceptos y se realiza un Examen pasa/no pasa , en donde se tienen en cuenta los requerimientos primarios y secundarios de los clientes para evaluar la viabilidad de los conceptos. Observando que la energía solar solo tiene un rendimiento de conversión del 8% como máximo y que el juguete va a estar ubicado en su mayoría de tiempo bajo la sombra, la energía solar como principal fuente de energía externa se torna en una opción completamente ineficiente. Una de las necesidades del cliente mas principales es que el juguete sea liviano; y se sabe que los motores de combustible son pesados y grandes en comparación con una batería. Por tanto se elimina toda forma de energía por combustión. Las baterías de níquel cadmio y las de níquel-hidruro metálico son una tecnología que tiende a desaparecer si se comparan con las de Polímero de litio, por tanto, serán excluidas de la selección final de conceptos. Para el sensado del movimiento del ratón, meterlo en un cilindro limitaría en gran medida su movimiento, por lo que no es una opción viable. Usar bandas transportadoras requeriría de una mayor fuerza para que el ratón las moviese, además de limitar también su movimiento, por lo tanto también esta opción será descartada. El costo es un factor muy influyente al momento de tener un producto terminado, por lo que el PLC como medio para el procesamiento de señales no es apropiado. Para la transmisión, un motor paso-paso pequeño no posee la suficiente fuerza o torque para mover el peso aproximado del robot.

36
3.5. COMBINACION DE CONCEPTOS Continuando con la metodología del diseño concurrente y en pro de hacer un robot que cumpla a cabalidad las especificaciones del cliente y a las métricas ya expuestas, se lleva a cabo una combinación de conceptos de donde se obtendrán las posibles variaciones y se analizaran cada una de ellas mirando sus ventajas y desventajas. Este proceso nos garantiza llegar a la mejor solución para el problema planteado. Tabla 3. Combinación de conceptos
Fuente de energía Sensar movimiento
del ratón ratón
Sensar señales externas
Procesamiento de señales Locomoción
Baterías Alcalinas
Batería recargable
de Polímero de litio
Esfera
Caja
Ultrasónicos
Infrarrojos
Contactos
Microprocesador
Procesador Digital de Señales
Patas
Orugas
Llantas
37
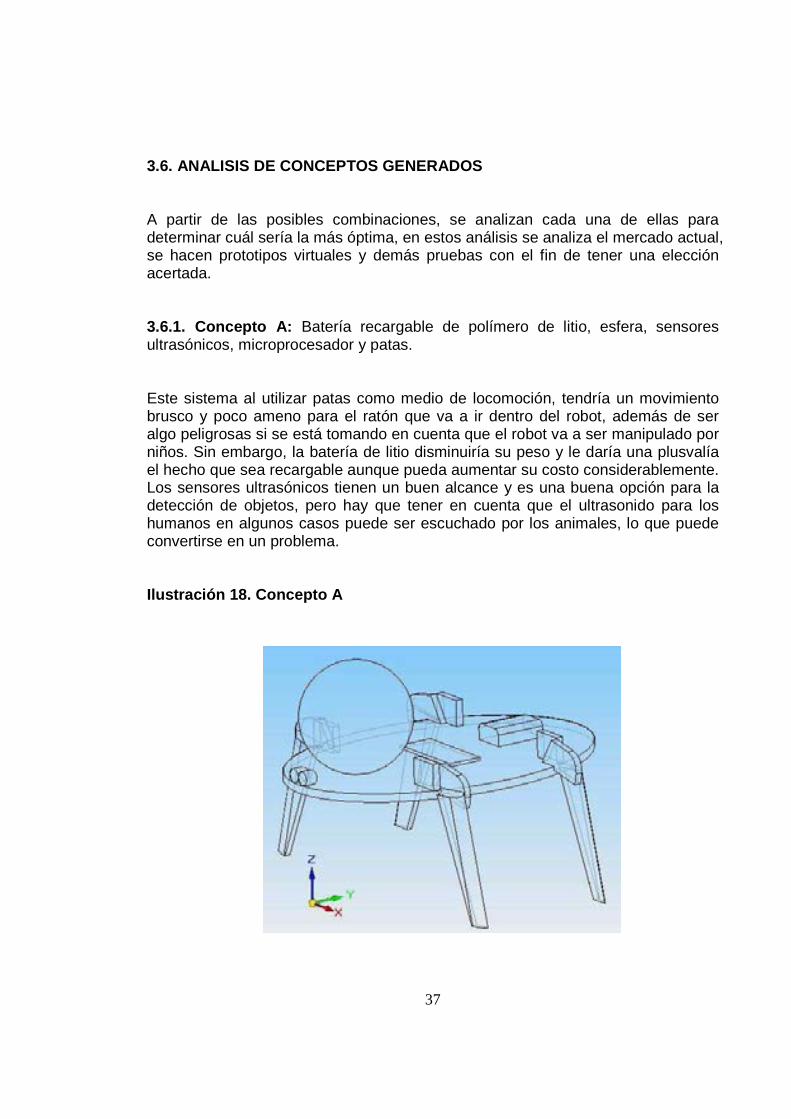
3.6. ANALISIS DE CONCEPTOS GENERADOS A partir de las posibles combinaciones, se analizan cada una de ellas para determinar cuál sería la más óptima, en estos análisis se analiza el mercado actual, se hacen prototipos virtuales y demás pruebas con el fin de tener una elección acertada. 3.6.1. Concepto A: Batería recargable de polímero de litio, esfera, sensores ultrasónicos, microprocesador y patas. Este sistema al utilizar patas como medio de locomoción, tendría un movimiento brusco y poco ameno para el ratón que va a ir dentro del robot, además de ser algo peligrosas si se está tomando en cuenta que el robot va a ser manipulado por niños. Sin embargo, la batería de litio disminuiría su peso y le daría una plusvalía el hecho que sea recargable aunque pueda aumentar su costo considerablemente. Los sensores ultrasónicos tienen un buen alcance y es una buena opción para la detección de objetos, pero hay que tener en cuenta que el ultrasonido para los humanos en algunos casos puede ser escuchado por los animales, lo que puede convertirse en un problema. Ilustración 18. Concepto A

38
3.6.2. Concepto B: Baterías alcalinas, caja, sensores infrarrojos, procesador digital de señales, orugas Las pilas alcalinas en los juguetes es una manera muy común de aminorar el precio final del juguete, aunque en algunos casos se pueda ver afectada la estética o la funcionalidad. Que el ratón vaya en una caja implica un sistema muy complejo de reconocimiento de posición de este y se tornaría confuso para manejar, pero es interesante en la medida en que el ratón tendría una periferia de 360° para su visión. Las orugas como medio de locom oción implican una dirección diferencial, lo que facilita el trabajo de dirección y facilidad en los giros pronunciados, las orugas también facilitan el acceso a cualquier terreno pero hay que tener en cuenta que el robot será diseñado para ser usado en casas e interiores sin mayores desniveles. Para el procesamiento de las señales, un Procesador Digital de Señales (DSP) sería una interesante opción teniendo en cuenta que la mayoría de sensores infrarrojos entregan una señal analógica de voltaje que este puede analizar directamente, sin embargo implicaría una dificultad adicional para su programación al igual que unos costos adicionales. Ilustración 19. Concepto B

39
3.6.3. Concepto C: Batería recargable de polímero de litio, esfera, sensores infrarrojos, microprocesador, llantas. Las llantas como medio de locomoción son una muy interesante idea, debido a que son fáciles de manejar, no necesitan un gran sistema mecánico para su funcionamiento y abren la posibilidad de tener sistemas de tres llantas, de cuatro, diferenciales o servo dirigidos. El sensor infrarrojo entrega una señal analógica de voltaje, que podrá ser analizada mediante el microprocesador si se cuenta con conversores análogo-digitales. En el caso de usar la esfera como sensado del movimiento del ratón sería necesario el uso de encoders que también serian procesados por el microprocesador. Las baterías recargables de litio son una buena opción siempre y cuando se elijan las de voltaje y corriente mas adecuadas para el uso que se les va a dar. Ilustración 20. Concepto C 3.6.4. Concepto D: Baterías alcalinas, Esfera, sensores de contacto, microprocesador, patas. El sensor de señales externas por medio de contacto es una buena idea para el momento de dar comandos al robot, como por ejemplo su encendido o funciones alternas que se tengan programadas, sin embargo, para la navegación autónoma o detección de obstáculos son muy ineficientes. Para este caso, el microprocesador sería la mejor opción porque los sensores de contacto son enteramente digitales y no habría señales analógicas que procesar y seria absurdo poner un DSP ya que el posicionado del ratón por medio de la esfera también seria digital (encoders).

40
Ilustración 21. Concepto D 3.6.5. Concepto E: Batería recargable de polímero de litio, caja, sensores ultrasónicos, procesador digital de señales, llantas. Con respecto a los sensores ultrasónicos habría que estudiar la posibilidad de que el ratón sufra molestias a causa del ultrasonido que estos emiten. La caja como medio de identificación del movimiento del ratón implica un desarrollo más complejo en esta área. Las llantas sin embargo, no dejan de ser una muy buena idea para la locomoción ya que teniendo en cuenta que no generan mucha perturbación y son ideales para el terreno principal en el que se va a utilizar el robot (dentro de la casa). Ilustración 22. Concepto E
41
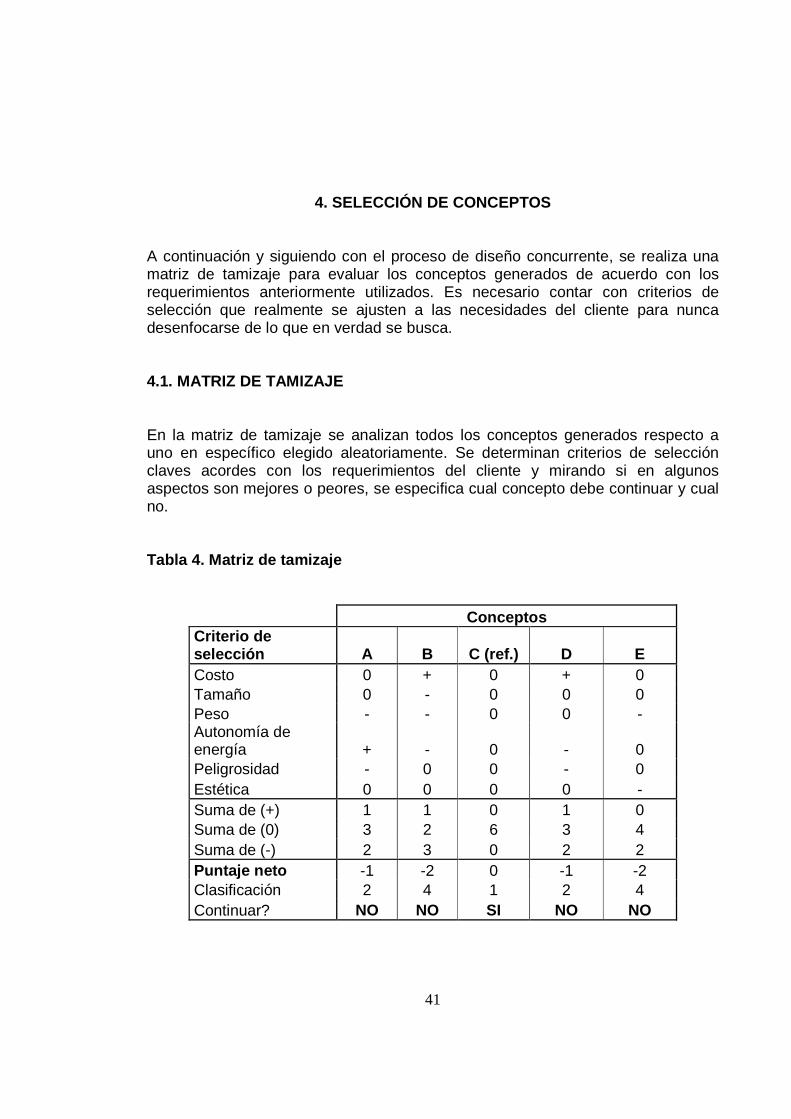
4. SELECCIÓN DE CONCEPTOS A continuación y siguiendo con el proceso de diseño concurrente, se realiza una matriz de tamizaje para evaluar los conceptos generados de acuerdo con los requerimientos anteriormente utilizados. Es necesario contar con criterios de selección que realmente se ajusten a las necesidades del cliente para nunca desenfocarse de lo que en verdad se busca. 4.1. MATRIZ DE TAMIZAJE En la matriz de tamizaje se analizan todos los conceptos generados respecto a uno en específico elegido aleatoriamente. Se determinan criterios de selección claves acordes con los requerimientos del cliente y mirando si en algunos aspectos son mejores o peores, se especifica cual concepto debe continuar y cual no. Tabla 4. Matriz de tamizaje
Conceptos Criterio de selección A B C (ref.) D E Costo 0 + 0 + 0 Tamaño 0 - 0 0 0 Peso - - 0 0 - Autonomía de energía + - 0 - 0 Peligrosidad - 0 0 - 0 Estética 0 0 0 0 - Suma de (+) 1 1 0 1 0 Suma de (0) 3 2 6 3 4 Suma de (-) 2 3 0 2 2 Puntaje neto -1 -2 0 -1 -2 Clasificación 2 4 1 2 4 Continuar? NO NO SI NO NO

42
A partir de esta matriz de tamizaje se determino que el concepto que debe seguir es el concepto C, debido a que quedo con un puntaje más alto al de los demás conceptos que fueron todos calificados negativamente. 4.2. REVISION Y MEJORA DE CONCEPTOS Aunque ya se haya elegido un concepto a desarrollar, es necesario tomar las cosas buenas de algunos de los conceptos y ver la posibilidad de combinar ideas, de forma tal que se tenga una solución mas global y acorde con los requerimientos. Respecto al costo, la calificación del concepto elegido fue baja, debido a la batería de litio que utiliza, sin embargo esta batería de una plusvalía al momento de competir contra otros productos del mercado y aunque las baterías de litio no tiene memoria, se puede pensar en un compartimiento para reemplazar esta batería. Los sensores de contacto no se deben desechar por completo ya que siempre serán necesarios al momento de darle al robot una orden externa y también pueden ayudar a reforzar la detección de obstáculos del robot.

43
5. ARQUITECTURA DEL PRODUCTO 5.1. DEFINICION DE LA ARQUITECTURA El robot que se está diseñando, es un aparato que tiene muchas posibilidades de expansión y mejoramiento de sus funciones y capacidades, esta abierto a muchos desarrollos tanto en el campo de la investigación como en el campo del entretenimiento; teniendo esto en cuenta se decidió realizar una arquitectura modular mixta debido a la facilidad para aplicar actualizaciones, adaptaciones y adiciones de elementos. 5.2. INTERACCIONES ENTRE ELEMENTOS FISICOS Y FUNCIONALES Tabla 5. Interacciones de la arquitectura modular
Elementos físicos
Soporte estructural Carcasa Decoración Sensores Externos Circuito de adquisición de
señales Llantas Circuito del microprocesador Aislamiento de
impermeabilidad Esfera con ratón Soporte de la esfera Encoders Motores Circuito de potencia Batería
Funciones Soportar otros elementos Protección Ser atractivo Sensar posibles obstáculos Instrumentación de los sensores Mover el robot Controlar del robot Proteger circuitos y elementos
de la humedad Recibir movimiento del ratón Soportar la esfera Sensar movimiento del ratón Dar movimiento a las llantas Energía eléctrica de los motores Dar energía eléctrica a todo el
sistema.
Al ser una arquitectura modular, cada elemento físico está relacionado con una función, de esto, se puede desagregar en niveles y sub grupos y se analiza en el diagrama de descomposición e interacciones de la arquitectura del producto.

44
5.3. DESCOMPOSICIÓN E INTERACCIONES En la arquitectura modular de un sistema se pueden identificar cada uno de sus sub-sistemas y además cada uno de los componentes de cada sub-sistema, esto es muy útil para tener una visión a groso modo de cómo esta compuesto el sistema. Además, con el diagrama a continuación se puede observar las interacciones entre los subsistemas y elementos. Las líneas verdes indican una interacción entre las partes de la pieza y las líneas azules indican una interacción entre los conjuntos. Ilustración 23. diagrama de descomposición e interacciones de la arquitectura del producto

45
Llantas traseras
Sensores externos
Servo de dirección
Carcasa
Aislamiento impermeabilidad
Esfera con ratón
Soporte esfera
Encoders
Circuito del Microprocesador
Circuito de potencia
Circuito de adquisición de
señales
Motores
Decoración
Batería
Soporte estructural
Llanta delantera
Chasis
Raton Locomocion
Sensores
Control
Fuente
Elemento físico o
funcional
Flujo de señales o datos
Flujo de fuerzas o energía
Flujo de material
Conjuntos
5.4. ESQUEMA DEL PRODUCTO A continuación se describe el esquema del producto por medio de un grafico en donde se muestran los elementos, subgrupos y sus interacciones. Ilustración 24. Esquema del producto

46
5.5. INTERACCIONES INCIDENTALES Entre los conjuntos se dan interacciones que no son propiamente deseadas, a continuación se muestra estas interacciones como interferencias, ruidos, fuerzas y movimientos. Ilustración 25. Interacciones incidentales
Todas estas interacciones han de ser tomadas en cuenta al momento de realizar la ubicación de los elementos en la arquitectura general, debido a que entre más cercanía de unos con otros, las interacciones tienden a ser mayores y la mayoría de estas son no deseadas. 5.6. DISTRIBUCIÓN GEOMÉTRICA Para la distribución geométrica se tuvieron en cuenta las interacciones indeseadas causadas por algunos módulos en otros, además, con una buena estética y poniendo cerca los módulos que interactúan mucho entre ellos. Teniendo en
Chasis
Control
Ratón Fuente Locomoción
Sensores
Vibración Interferencia R/F
Distorsión Térmica
Vibración

47
cuento todo esto, se llego a la distribución geométrica que se puede apreciar en la Ilustración 26. Ilustración 26. Distribución geométrica

48
6. ARQUITECTURA DE SISTEMAS ELECTRONICOS 6.1. ANALISIS DEL SISTEMA ELECTRONICO A través de 2 encoders ubicados alrededor de la esfera donde está el hámster (similar al funcionamiento de un mouse de computador), se necesita conocer la velocidad y la dirección del movimiento del ratón, para así mismo, generar un movimiento proporcional en el robot. También se cuenta con sensores infrarrojos en la parte frontal del robot, para su seguridad y la del ratón, por tanto se debe tener en cuenta estas señales para evitar los obstáculos. La locomoción del robot estará dada por dos llantas en la parte trasera en configuración diferencial de forma triciclo, que serán movidas por dos motorreductores. De esta forma, cada motorreductor manejara una llanta independientemente de la otra, y así se dará la velocidad y dirección del robot contando en la parte delantera con una rueda loca. Así pues, hay que tener en cuenta el circuito de potencia que debe controlar cada uno de los motorreductores por separado. 6.2. ESPECIFICACIONES DE COMPONENTES ELECTRONICOS 6.2.1. Interruptores externos. Para el encendido del robot, se contara con un interruptor externo controlado por el usuario, esta señal deberá encender el circuito lógico y permitir el paso de corriente a encoders, sensores y al circuito de potencia. 6.2.2. Encoders. Se ubicaran dos encoders para medir el movimiento de la esfera en la que está el ratón, estos movimientos nos dirán en qué dirección y con qué velocidad se está moviendo este. Solo es necesario conocer el Alabeo (Roll) y la Guiñada (Yaw) de la esfera, por eso solo se ubicaran solo dos encoders. El funcionamiento de un encoder es sencillo, en su interior cuenta con ranuras a intervalos constantes y tiene un detector infrarrojo que devuelve un tren de pulsos

49
periódico proporcional al de su movimiento, el canal A desfasado del canal B para saber la dirección del movimiento y el canal I con un pulso por cada vuelta. Se cuenta entonces con dos encoders ubicados a 90 grados uno del otro midiendo la velocidad horizontal y vertical de la esfera. Ilustración 27. Funcionamiento de un Encoder incremental 6.2.3. Sensores Infrarrojos. Para la detección de obstáculos habrá sensores de distancia infrarrojos, tres ubicados en la parte delantera y uno en la parte trasera que cubren un 90% de la capacidad de movimiento del robot. Los sensores de distancia infrarrojos son muy adecuados ya que pueden detectar obstáculos lo que facilita la navegación del robot sin tener contacto con ellos y también dando un rango suficiente para tomar una decisión. 6.2.4. Circuito Lógico. En el circuito lógico se cuenta con un microcontrolador, que cumplirá la función de analizar tanto las señales de los encoders como las de los sensores infrarrojos y dependiendo de lo que reciba, traducir estos datos a dos señales PWM para controlar los motores. 6.2.5. Circuito de potencia y Motores DC. Deberá también existir un circuito de potencia, en el que se toma la señal PWM que genere el microcontrolador y por medio de los drivers se proporciona un voltaje al motor para su correcto funcionamiento. Cada motor contara con una caja reductora para aumentar su torque y disminuir su velocidad, ya que así quedan aptos para ser utilizados en la robótica móvil.

50
7. DISEÑO INDUSTRIAL
7.1. ANALISIS DEL DISEÑO INDUSTRIAL Para el robot es necesario tener en cuenta ciertos conceptos, teniendo presente que el producto está dirigido a que sea manipulado por niños, este deberá tener unas características básicas en donde se debe reflejar su facilidad de uso. Aunque la interacción con el usuario no es mucha, deberá tener un aspecto muy agradable a la vista. Se debe también tener presente el contacto en la interacción del animal con el robot, debe ser seguro por lo que la esfera en donde se ubica el ratón debe tener características ergonómicas para el ratón. 7.1.1. Necesidades ergonómicas. Las necesidades ergonómicas del robot son bajas con respecto al usuario debido a la poca manipulación con sus partes, pero necesidad alta con respecto al ratón, por su constante interacción. Ilustración 28. Clasificación de la necesidad ergonómica del producto

51
7.1.2. Necesidades estéticas. Teniendo en cuenta que el producto está pensado como un juguete, la parte visual debe ser muy atractiva ya que la parte estética es un criterio muy importante para su comercialización. Ilustración 29. Clasificación de la necesidad estética del producto
7.2. NATURALEZA DEL PRODUCTO El robot juguete es un producto dominado mas por el usuario que por la tecnología, sin embargo, se encuentra muy central debido a que la tecnología influye mucho en el desarrollo de las características de este, aunque la apariencia y el aspecto visual sea lo más importante. Ilustración 30. Naturaleza del producto
Tecnología Usuario
Juguete robot

52
7.3. EVALUACIÒN DE LA CALIDAD DEL DISEÑO INDUSTRIAL 7.3.1. Calidad de las interfaces de usuario. El uso del producto deberá ser muy intuitivo, que solo tenga un interruptor para su encendido y lo único que debe hacerse es insertar un ratón en la esfera y encender el dispositivo. Todas sus características deberán ser seguras, tanto para el usuario como para el ratón. 7.3.2. Requerimientos emocionales. Este es el fuerte del producto. Su gran atractivo visual y su función novedosa inspiran mucho orgullo de posesión tanto para el comprador como para el usuario, además de provocar un gran orgullo para el creador de este. 7.3.3. Facilidades de mantenimiento y reparación. Por su modulo de extracción de excrementos del ratón y el fácil retiro de la esfera en donde se ubica este, la limpieza y mantenimiento deberá poder ser realizada de una manera muy sencilla. La carcasa deberá ser completamente reemplazable, y sus partes, aunque tengan tornillos de seguridad, también lo deben ser para facilitar su mantenimiento general o reparación. 7.3.4. Uso apropiado de recursos. El material del cual se disponga deberá ser optimo para las necesidades funcionales del dispositivo, su costo no deberá ser el más alto sin dejar de cumplir con las necesidades básicas, y deberá ser de fácil adquisición contando también con que el diseño siendo bastante depurado, no tendrá partes innecesarias, reduciendo así el uso del material. 7.3.5. Diferenciación del producto. En la actualidad no hay productos semejantes, por lo que en su diferenciación con otros juguetes es muy alta. Se consideraría exclusivo y seria de fácil recordación.

53
Ilustración 31. Clasificación de la diferenciación del producto

54
8. DISEÑO PARA MANUFACTURA
8.1. ANALISIS DEL DISEÑO PARA MANUFACTURA En este proceso es necesario tener en cuenta todos los componentes que se necesitan para el ensamble final del robot juguete, como lo son los procedimientos de ensamble y procesos de manufactura de las piezas a realizar, para de esta manera poder tener un costo y tiempo aproximado para la producción del dispositivo. Si se cuenta con una lista de detallada de elementos, procesos de manufactura, procedimientos de ensamble, costos y tiempos, se puede lograr una disminución importante en estos últimos además de un análisis de elementos que se puedan reemplazar o mejorar, todo en búsqueda de un mejoramiento continuo del diseño del producto. 8.2. LISTADO DE COMPONENTES Tabla 6. Listado completo de componentes Componente cantidad costo unitario estándar
Motorreductor tamiya 72102 2 40.000 SI
Soporte para motorrreductor Tamiya 72102 2 5.000 SI
Acople de motorreductor con llanta Tamiya 2 5.000 SI
Llanta Tamiya de 130mm 2 20.000 SI
Tornillo de 1/8" x 1/4" 6 100 SI
tra
cc
ión
Batería de polímero de litio de 2 celdas 1 30.000 SI
Encoder óptico incremental S1-1024 2 80.000 SI
Tuerca de 4mm 2 500 SI
Bus de datos de 5 canales x 10cm 2 100 SI
soporte en plástico inyectado para encoder 2 500 NO
sop
ort
e
esf
era

55
Pololu Ball caster 3/8" 4 5.000 SI
Tornillo de 1/16" x 1/4" 8 100 SI
Soporte en plástico inyectado para esfera 1 2.000 NO
Recipiente para desechos 1 5.000 SI
Tornillo de 1/8" x 2" 4 100 SI
Base para robot en plástico 1 3.000 NO
Carcasa en plástico inyectado 1 5.000 NO
Sensor óptico de distancia Sharp GP2Y 4 15.000 SI
Base para sensor óptico en plástico inyectado 4 500 NO
Bus de datos de 3 canales x 10cm 4 500 SI
Base lineal de 3 pines 4 100 SI
Se
nso
res
Pololu Ball caster de 2" 1 7.000 SI
Tornillo de 1/8" x 1/2" 34 100 SI
PIC 18F2550 1 20.000 SI
Cristal de 12MHz 1 600 SI
Plug con 3 pines 4 300 SI
Plug con 6 pines 4 300 SI
Plug con 4 pines 2 300 SI
base para PDIP de 28 pines 1 2.000 SI
pin/plug 12 100 SI
cable verde 1 500 SI
regulador 7805 1 4.000 SI
condensador electrolítico 0.33uF 1 300 SI
condensador electrolítico 0.1uF 1 300 SI
condensador cerámico 100.000pF (104) 6 100 SI
condensador cerámico 27uF (27) 2 100 SI
resistencia de 330 ohm 5 100 SI
resistencia de 1k ohm 1 100 SI
resistencia de 10k ohm 1 100 SI
resistencia de 20k ohm 1 100 SI
diodo 1N4002 1 100 SI
diodo LED pequeño 3 200 SI
PCB 1 10.000 NO
VNH2SP30 Driver dual para motores 1 115.000 SI
Circ
uite
ría y
ele
ctró
nic
a
Esfera para hamster 1 20.000 SI

56
8.3. DISEÑO PARA MANUFACTURA DE COMPONENTES PROPIOS 8.3.1. Carcasa. El proceso de producción de la carcasa va a realizarse mediante inyección de plástico, que es un método ya definido y estandarizado, el plástico es un material fácil y rápido de moldear, durable, estético y apto para los requerimientos de seguridad en un juguete. Una característica importante de la carcasa es que por dentro lleva un soporte para la batería que no pesa mas de 300 gramos pero esto hace que la carcasa deba tener un mínimo de dureza. 8.3.2. Base y soporte. La base y los soportes también serán realizados en plástico inyectado, debido principalmente a su bajo costo y a sus características. Los soportes serán ensamblados a la base por medio de tornillos estándares. 8.3.3. Tarjeta lógica. La tarjeta lógica será impresa en maquinas especializadas para esto, será atornillada a la base en unos mini soportes que aíslen el cobre de la superficie o base. 8.3.4. Impermeabilizador. Este será un cobertor de plástico de muy baja permeabilidad y será acomodado de tal forma que dirija los líquidos que ingresen, hacia un recipiente seguro y extraíble. Este deberá dar protección a los circuitos y componentes internos del robot. 8.3.5. Decoración externa. En la decoración externa se encuentran objetos opcionales como la cola, las orejas y calcomanías decorativas. 8.4. PROCESO DE ENSAMBLE El proceso de ensamblaje de las piezas está diseñado para evitar el gasto innecesario de recursos y tiempo. A continuación se describirán los pasos a seguir para ensamblar los diferentes elementos en un proceso optimo para obtener el robot en un tiempo mínimo.

57
Tabla 7. Pasos para el ensamble del modulo de tracción
1 ensamblar motorreductor con el soporte 2 atornillar motorreductor al soporte 3 ensamblar acople al motorreductor 4 atornillar acople 5 ensamblar llanta al acople 6 poner tuerca a la llanta
Ilustración 32. Explosionado del modulo de tracción
Tabla 8. Pasos para el ensamble del modulo de soporte de esfera
1 atornillar ball casters a cada una de los 4 brazos soportes
2 atornillar soportes largos sus posiciones en la base
3 atornillar soportes cortos a sus posiciones en la base

58
4 acoplar cada uno de los 2 encoders en sus soportes
5 poner tuerca a los encoders 6 atornillar los soportes con los encoders, a al base
7 conectar el bus de datos correspondiente a cada encoder
8 acoplar los discos a los dos encoders Ilustración 33. Explosionado de modulo de soporte de esfera
Tabla 9. Pasos para ensamble del modulo de sensores infrarrojos
Pasos para ensamble del modulo de sensores infrarrojos
1 atornillar cada uno de los 4 sensores a su soporte

59
Ilustración 34. Explosionado de modulo de sensores infrarrojos
Tabla 10. Pasos para ensamble completo del robot
Pasos para ensamble completo 1 Ubicar la base general del robot por su parte inferior 2 Atornillar los cuatro módulos de sensor infrarrojo 3 Atornillar la rueda omnidireccional a la base del robot 4 Atornillar las dos bases metálicas para imanes a la base del robot 5 Acoplar el depósito de desechos a las bases metálicas 6 Girar la base general del robot 7 Atornillar los dos módulos de tracción a la base del robot 8 Atornillar el circuito de potencia a la base del robot 9 Atornillar el circuito lógico a la base del robot
10 Atornillar el modulo de soporte de la esfera a la base del robot 11 Conectar los motores con el circuito de potencia 12 Conectar los encoders al circuito lógico 13 Conectar los sensores infrarrojos al circuito lógico 14 Conectar el circuito lógico con el circuito de potencia 15 Ubicar la carcasa del robot por su parte inferior 16 Acoplar el interruptor de encendido a la carcasa 17 Acoplar batería a la carcasa 18 Conectar batería con interruptor y con el circuito de potencia 19 Conectar interruptor a circuito lógico 20 Atornillar carcasa a la base general del robot 21 Ubicar esfera en su soporte

60
Ilustración 35. Explosionado del robot por módulos

61
8.5. TIEMPO DE ENSAMBLE El tiempo estimado para el ensamble total es calculado a partir de manipulación de cada pieza mas el tiempo de inserción de estas, este tiempo de ensamble del producto es de 10 a 15 minutos, debido a que muchos de sus componentes se pueden ensamblar de manera paralela por su modularidad. 8.5.1. Índice DPE. Para el cálculo del índice de diseño para manufactura, se tiene la siguiente ecuación en donde se toma en cuenta el número mínimo de partes y el tiempo total estimado para el ensamble. • Ecuación 1. Índice de diseño para manufactura
8.6. ACCIONES PARA EL MEJORAMIENTO DEL PROCESO DE ENSAMBLAJE El proceso de ensamblaje está diseñado para hacer varios pasos al mismo tiempo (paralelamente) y así disminuir tiempo de producción y costos. Todas las piezas del robot serán ensambladas desde arriba y no será necesario rotarlo para ensamblarlas. Los tornillos a utilizarse serán estándares, y solo habrán dos tamaños de tornillos, unos para los elementos de la carcasa y otros para los soportes y elementos de la base.

62
Los buses de cables de los encoders deberán ser de distinto color al de los sensores delanteros y a los cables del motor, para facilitar su identificación y agilizar su conexión en la tarjeta debida. Poner marcas geométricas en las bases y en los soportes para evitar confusiones al momento de ensamblar.

63
9. DISEÑO DETALLADO
9.1. DISEÑO MECANICO DE LA ESTRUCTURA DEL ROBOT En base a los procedimientos previamente realizados de análisis de requerimientos respecto a la generación y selección de conceptos, se decidió desarrollar un sistema triciclo el cual cuenta con tres grados de libertad mientras se esté moviendo sobre una superficie plana. En relación con un sistema global de coordenadas, el robot puede estar en cualquier posición especificada por dos coordenadas, además de estar apuntando en un ángulo especifico que puede ser determinado como otra coordenada. Ilustración 36. Movimiento de un sistema tipo triciclo
Al tener una estructura en forma de triciclo, se eligió tener en la parte delantera una “rueda loca” en vez de una “rueda direccionable”, esto, debido a que es mucho más fácil su desplazamiento y mucho más real respecto a los movimientos que haría un ratón en realidad. Implicaría entonces que las llantas traseras funcionen de manera diferencial para dar dirección al movimiento del robot.

64
Ilustración 37. Disposición de las llantas para el movimiento del robot Basándose en las métricas propuestas inicialmente y en que el producto final debe tener un alto grado de estética, se diseño una base en la que se pueda organizar tanto motores, como esfera y sensores de una manera estética y útil. Se pensó en una forma ovalada teniendo en cuenta dos factores principalmente: lo que facilita esto al momento de la evasión de obstáculos y la estética del robot. Ver planos anexos para medidas más detalladas. Ilustración 38. Forma y medidas principales de la base

65
9.2. TRACCIÓN Y LOCOMOCIÓN Para la parte de la tracción como ya se había mencionado anteriormente, se decidió utilizar dos motorreductores, uno para cada llanta, de manera que se pueda manejar la velocidad y dirección de manera diferencial. Se realizo una búsqueda exhaustiva de los posibles motorreductores a utilizarse hasta que se encontró un “kit” que comprendía también las llantas y cumplía con los requerimientos de torque y velocidad necesitados. Tabla 11. Especificaciones técnicas de los motorreductores
Especificaciones Voltaje 7.2V RPM (sin carga) 242 r/min Consumo de corriente (sin carga) 0.67 A Torque en la mejor eficiencia 0.49 N*m Peso 180 g
Tomando en cuenta que en las métricas señaladas como deseadas en un principio se estableció que el robot debería pesar alrededor de 5Kg y moverse a una velocidad de 0.5 m/s, el motorreductor Tamiya 72102 fue el más apropiado para ser utilizado en este dispositivo. Las llantas que incluye el “kit” en donde vienen los motorreductores, también se ajustan perfectamente a los requerimientos ya que son de gran tamaño para soportar el peso indicado y son estéticamente muy atractivas. Una vez adquiridos los motorreductores con sus respectivas llantas, soportes y componentes adicionales, se realizo el modelado digital de sus partes para diseñar los elementos adicionales o tener un correcto concepto de las proporciones y tamaños dentro del robot. Para la parte delantera del robot, se decidió poner un ball-caster o “rueda loca” en forma de bola. Para esta rueda delantera, solo es necesario tener en cuenta que resista la fuerza que será ejercida sobre ella.

66
Ilustración 39. Simulación del modulo de tracción El soporte cumple la función de mantener el motorreductor en una posición estática, dispersar el calor que pueda generar y disminuir la vibración que este produce aislándolo de la base. La ubicación de las llantas de tracción podía haberse hecho tanto en la parte delantera como en la trasera, pero se decidió poner en la parte trasera para equilibrar el peso y por motivos de espacio. Si en un futuro se desearía aplicar una odometría detallada para el movimiento autónomo del robot, es necesario tener en cuenta que la distancia entre las llantas es de 22.5 centímetros. 9.3. EL MOVIMIENTO DEL RATON El movimiento del ratón dentro de su contenedor, será la principal guía del robot para determinar con que velocidad y en qué dirección deberá desplazarse. Desde la selección de conceptos, se decidió realizar un sistema con una esfera en donde se pueda ingresar un hámster y dejarlo ahí dentro para que se mueva en la dirección que el desee. Este sistema será muy similar al modo de funcionamiento

67
de un mouse de computador, en donde con el movimiento de la mano se mueve una pequeña esfera ubicada en la parte de abajo, el movimiento de esta esfera es captado por dos encoders incrementales ubicados en la parte interna del mouse, a groso modo, esta será la manera en que se captara el movimiento del hámster en el robot. Ilustración 40. Funcionamiento interno de un mouse
Fuente: KLEMP, Jeremy. Diagrama del mecanismo de movimiento de un mouse mecánico estándar. [En Línea] Alabama: Wikipedia, 2004 [consultado el 26 de octubre de 2007] Disponible en internet: http://es.wikipedia.org/wiki/Mouse
A partir de esto se diseña una base en donde la esfera que contiene el ratón pueda girar lo más libremente posible, no obstruya la visión del ratón, se puedan ubicar los encoders y además tenga un ducto o salida por si el hámster hace sus necesidades dentro de la esfera. La esfera por su parte, debe permitir el flujo de oxigeno pero no debe permitir salir al ratón a menos que un humano lo saque. Partiendo de estas premisas se diseño un suporte que cumple con todos los requerimientos y se acopla perfectamente con una esfera prediseñada para hámster.

68
Ilustración 41. Simulación del soporte de la esfera con base para encoders
El soporte cuenta con 4 brazos, los cuales tienen un ball-caster en la parte superior en donde girara la esfera. Los brazos delanteros son más cortos permitiendo una mayor visibilidad al ratón y un mejor aprovechamiento del espacio dentro del robot. El soporte también tiene bases con agujeros exactos para que se puedan colocar 2 encoders incrementales marca US Digital con una resolución de 1024 pulsos por vuelta. Para el prototipo Alfa, se realizaran en acrílico transparente para su estética y posible mejor de visibilidad, pero para el diseño final, se piensa realizar en plástico inyectado por la disminución de costos. El soporte cuenta en la base con un agujero en medio de los brazos en donde ira ubicado un canalizador de excrementos y estos irán directamente al recipiente dedicado a esto. La esfera que se pone arriba, con 12 cm de diámetro es de tamaño estándar y está diseñada para que en ella quepan la mayoría de hámsters convencionales. 9.4. DESECHOS ORGANICOS Es muy importante tener en cuenta que el ratón es un ser vivo y por lo tanto genera desechos orgánicos con cierta regularidad, por este motivo, es pensó en una manera para que sus desechos no fueran perjudiciales para la salud del

69
usuario, no dañaran los circuitos internos del robot y además pudieran ser retirados o limpiados fácilmente. Ilustración 42. Sistema de desechos orgánicos
Para esta finalidad, se diseño entonces un canal en forma de embudo, para dirigir los posibles desechos del hámster, a un depósito que se ubicara en la parte de abajo del robot. Este depósito debe ser completamente impermeable y sellado, pero al mismo tiempo de fácil retiro para su aseo. Esta caja se ubica debajo del robot y se sostiene por medio de imanes que permiten al usuario retirarla fácilmente pero que a su vez tienen la fuerza necesaria para que la caja soporte el peso de los desechos y posibles vibraciones del robot sin caerse accidentalmente.

70
Ilustración 43. Deposito extraíble de desechos orgánicos
9.5. SENSORES DE DISTANCIA PARA LA SEGURIDAD Para la seguridad del ratón y del robot en general, se ubicaron cuatro sensores de distancia infrarrojos alrededor de este, estos sensores proporcionaran la información en caso de algún obstáculo pared con la que se pudiera colisionar y dañar alguna de sus partes, la idea de los sensores, es precisamente prevenir estas colisiones, proveyendo la información del entorno al microcontrolador para que se tome la opción de limitar la dirección o la velocidad que lleve el robot. Al estar las llantas ubicadas en la parte trasera del robot y el ratón en la parte delantera, es primordial proteger la parte delantera en mayor proporción ya que es la que más se va a mover y donde va a estar el ratón que se tiene que salvaguardar de cualquier daño. Por tanto, se decidió ubicar tres sensores infrarrojos en la parte delantera del robot y uno en la parte trasera. Los sensores de la parte delantera van ubicados uno “mirando” directamente al frente y los otros dos “mirando” hacia cada lado a un ángulo de 45° del primer sensor para lograr cubrir una mayor área de visión. El sensor infrarrojo trasero va ubicado en el centro “mirando” hacia atrás para el momento en que el robot este retrocediendo.

71
Ilustración 44. Posición de los sensores
Para efectos de una futura odometría, se debe saber a qué distancia exactamente están ubicados los sensores respecto el elemento que da tracción al robot, en este caso las llantas. El sensor trasero está ubicado a una distancia de 8 centímetros respecto al eje de las llantas, y el sensor delantero a 20 centímetros. Los sensores auxiliares, están ubicados al lado del sensor frontal a una distancia de 5 centímetros verticalmente y 4 centímetros horizontalmente (según ilustración 45.), recordando que cada uno de ellos tiene una inclinación de 45 grados. Es de tener en cuenta que los sensores seleccionados tienen un rango de visión de 10 a 80 cm y su salida es analógica. 9.6. CARCASA La carcasa del robot tiene como principal objetivo proteger los elementos internos que sean frágiles ante golpes o tropiezos, también resguarda los circuitos del agua o de humedad en el ambiente. Esta carcasa además, influye mucho en la estética final del producto, ya que es esta, la parte visual, la que genera una diferenciación del producto frente a otros y le puede dar un gran valor agregado al juguete.

72
Teniendo en cuenta las métricas antes seleccionadas, se estableció que el robot debería tener una altura cercana a los 20 centímetros y teniendo como referencia que la base está a 5 centímetros del suelo a causa de las llantas, se realizo una carcasa de 15 centímetros de altura. Siguiendo con el diseño de la base y queriendo expresar un aspecto futurista pero a la vez similar a un ratón, se le dio una forma ovalada. Ilustración 45. Forma de la carcasa
Se sabe que la esfera para hámsters estándar tiene un diámetro de 12 centímetros, así que se tomaron estas medidas para hacer un agujero un poco mas grande en la parte delantera en una sección de la carcasa en donde la inclinación de esta permitiera una mayor visibilidad al ratón sin afectar su estética. Además de este agujero, se realizaron los agujeros de las llantas traseras laterales. Para optimizar espacios dentro del robot, facilitar su acceso y según la arquitectura previamente diseñada, la carcasa también cumple la función de tener un soporte para la batería, la cual será de fácil extracción para el momento de realizar su carga. Este soporte fue puesto en un lugar estratégico de tal forma que la batería quede muy asequible pero al mismo tiempo muy segura.

73
Ilustración 46. Prototipo virtual de la carcasa
Otra función importante que cumple la carcasa es la de servir como medio de interacción con el humano, ya que es a través de esta que se debe poder encender o apagar el robot. Se ubico en la parte trasera el interruptor de encendido en un lugar visible y con una clara señalización para que el usuario sepa cuando está apagado y cuando esta encendido y como cambiar este estado. Para la sujeción de la carcasa a la base, se pusieron 6 viñetas en la parte de debajo de la carcasa que queda en contacto con los lados de la base, de esta manera se puede atornillar fácilmente y queda segura. 9.7. DISEÑO ELECTRONICO Se parte de la arquitectura electrónica previamente definida, pero a continuación, se analiza cada elemento de esta, seleccionando cual de los productos en el mercado utilizar y como utilizarlo de acuerdo a sus principales funciones y características. 9.7.1. Encoders. Para la selección de los encoders primero se determino la naturaleza del encoder a utilizar. Debido a que estos se necesitaban solo y exclusivamente para medir la velocidad de la esfera, sería necesario adquirir solamente encoders incrementales.

74
La resolución de estos no sería de gran importancia debido a que no es una operación que requiera de una gran precisión, sin embargo, hay que tener en cuenta sus características al momento de realizar los cálculos para el movimiento del robot. Después de realizar una búsqueda de proveedores a nivel mundial de encoders incrementales y sus respectivos productos, se eligió el encoder S1-1024 de la marca US Digital, cuya apariencia física se puede observar en la ilustración 48 y sus especificaciones técnicas en la tabla 10 Ilustración 47. Encoder incremental US-Digital S1-1024
Fuente: S1 Optical Shaft Encoder [En Linea] Washintong: US DIGITAL, 2008 [consultado el 13 de junio de 2008] disponible en internet: http://www.usdigital.com/products/encoders/incremental/rotary/shaft/s1 Tabla 12. Especificaciones técnicas de los encoders S1-1024
PARAMETRO MEDIDA
Resolución 1024 CPR
Consumo de corriente 57/85 mA
Nivel Bajo de salida (max) 0.5V a 8mA
Nivel Alto de salida (min) 2.4V a -40uA
Peso 0.7 oz
Aceleración (max) 250000 rad/sec²
Velocidad (max) 10000 RPM

75
9.7.2. Sensores Infrarrojos. La selección de los sensores también se hizo mediante la búsqueda de proveedores a nivel internacional. Teniendo en cuenta las características que se buscaban para que proporcionaran un área de seguridad en el robot. Se encontró que la empresa SHARP tiene una gran variedad de sensores infrarrojos a unos muy buenos precios, en donde se encuentra la familia de sensores GP2 que son sensores de distancia. De estos se selecciono el sensor GP2Y0A21YK0F cuyas características cumplen con las requeridas y son mencionadas en la tabla 11. Tabla 13. Especificaciones técnicas de los sensores SHARP GP2Y0A21YK0F
PARAMETRO MEDIDA
Vcc 5V
Tipo de salida Analógica
Tiempo de respuesta 39ms
Rango 10 a 80cm
Consumo promedio de corriente 30mA
Estos sensores ya vienen instrumentados completamente, lo que simplifica el circuito eliminando la necesidad de añadir hardware externo y cuenta con una salida analógica que, como se ve en la ilustración 49, aunque no es lineal se puede linealizar fácilmente para su correcta implementación.

76
Ilustración 48. Curva de comportamiento del sensor SHARP GP2Y0A21YK0F
Fuente: Datasheet SHARP GP2Y0A21YK0F [En Linea] Washington: Sharp Electronics Corporation, 2007 [consultado el 15 de agosto de 2008]. Disponible en internet: http://www.sharpsma.com/Page.aspx/americas/en/part/GP2Y0A21YK0F/ 9.7.3. Microcontrolador. Para la escogencia del microcontrolador se tuvo en cuenta principalmente las funciones que se necesitaban realizar. Para esto, fue realizado un diagrama de caja negra. Ilustración 49. Caja negra de sistema de microcontrolador Teniendo en cuenta que cada sensor infrarrojo tiene una salida analógica que debe entrar al microcontrolador y que cada encoder tiene al menos dos salidas (fase A y fase B), se tiene como parámetro inicial para la escogencia de un micro que este debe tener al menos 8 entradas, 4 de las cuales deben aceptar niveles voltajes analógicos. El microcontrolador también debe tener 4 salidas y preferiblemente contar con un modulo para la generación de señales PWM. Seguidamente se realizo un diagrama del flujo de cómo debería ser el software del microcontrolador para determinar sus características internas.
Microcontrolador
Sensor infrarrojo (x4)
Encoder (x2)
PWM (x2)
Bit de control de dirección (x2)

77
Ilustración 50. Diagrama de Flujo para el software del microcontrolador
Inicio
Leer sensores
Hay obstáculos?
Leer encoders
Están Girando?
Calcular dirección y velocidad del movimiento
Calcular velocidad de cada motoreductor
Dirección = 0 Velocidad = 0
Activar señal lumínica
Calcular en que dirección y velocidad no puede
haber movimiento
No
Si
No
Si
Ubicar el obstaculo
Enviar el PWM adecuado a cada motor.

78
Teniendo ya esto decidido y un bosquejo del software que debería tener el microcontrolador, se determino que debería ser un microcontrolador con al menos 4 entradas analógicas o conversores ADC, 3 interrupciones externas, 3 timers y 2 salidas de PWM. A partir de esto, se encontró en la familia PIC18 de Microchip, el microcontrolador 18F2550 con el que se realizaron varias pruebas y finalmente se utilizo en el prototipo Alfa. Las características de este microcontrolador pueden ser observadas en la tabla 12. Tabla 14. Especificaciones técnicas del microcontrolador PIC18F2550
PARAMETRO MEDIDA
Líneas I/O 25
Frecuencia máxima del cristal 40 MHz
Interrupciones externas 3
Timers 1 de 8 bits y 3 de 16 bits
Módulos de PWM 2 (Capture/Compare/PWM)
Conversores A/D 10 de 10 bits
Programación serial In-Circuit Si
Memoria Flash 32 KBytes
Encapsulamiento PDIP, SOIC
Ilustración 51. Diagrama de pines del microcontrolador PIC18F2550
Fuente: Datasheet PIC18F2550, [En Linea] Arizona: Microchip Technology Inc., 2008 [consultado el 13 de octubre de 2008] disponible en intrnet: http://www.microchip.com/wwwproducts/Devices.aspx?dDocName=en010280

79
Para el desarrollo del software del microcontrolador, se tuvieron en cuenta ciertos aspectos a mencionar a continuación. Conociendo que el perímetro de la esfera es de 36 cm, el del disco del encoder es de 9 cm y además sabiendo que la velocidad máxima de un hámster corriendo es de 1.79 m/s. Se realizaron los cálculos para tener el tiempo mínimo en el cual medir la frecuencia de los pulsos de cada encoder sin tener un error en la medición a causa de que el ratón haga al encoder dar más de una vuelta (1024 pulsos) en el tiempo en que se está contabilizando los pulsos para saber la frecuencia, si esto pasara, la medición seria errónea ya que el conteo se reiniciaría con el cambio de vuelta. Para esto se realizo el procedimiento matemático descrito en las ecuaciones 2 y 3. • Ecuación 2. Calculo de las RPM máximas que puede alcanzar el encoder
Ya teniendo la velocidad máxima en que se va a mover el encoder, se sabe cuánto se demorara como mínimo el encoder en dar una vuelta completa, según la ecuación 3. • Ecuación 3. Calculo del tiempo mínimo para el encoder en dar una vuelta

80
Este tiempo mínimo por vuelta es el tiempo máximo en el que se deben contar los pulsos del encoder para medir su frecuencia y que no haya error alguno. 9.7.4. Circuito electrónico. Para la realización del circuito electrónico se tomaron en cuenta todas las recomendaciones de las hojas de datos del microcontrolador, además de las conexiones básicas que se deberían realizar para conectar este a los elementos externos como los sensores y encoders. El sistema electrónico principal de este robot consiste en 4 sensores de distancia infrarrojos, 2 encoders, 1 microcontrolador, 1 regulador de voltaje y 1 integrado con 4 compuertas AND para el control de dirección del puente H. Ni para los sensores infrarrojos, ni para los encoders se requirió alguna instrumentación externa ya que estos la traían interna de fábrica, así que se conectan directamente al microcontrolador. Se baso en la información proporcionada por el fabricante para escoger los condensadores a utilizarse de acuerdo con el cristal seleccionado como se ve en la ilustración XX. Ilustración 52. Circuito y recomendaciones para el Cristal.
Fuente: Datasheet PIC18F2550, [En Linea] Arizona: Microchip Technology Inc., 2008 [consultado el 13 de octubre de 2008] disponible en intrnet: http://www.microchip.com/wwwproducts/Devices.aspx?dDocName=en010280

81
El circuito del reset externo, es un concepto sencillo pero muy relevante a tener en cuenta sobre todo al momento de los prototipos y pruebas. El fabricante propone una opción de reset controlado por la fuente de poder externa y que es muy útil para evitar errores a causa de una pendiente de encendido muy lenta. Ilustración 53. Circuito del Master Clear o Reset
Fuente: Datasheet PIC18F2550, [En Línea] Arizona: Microchip Technology Inc., 2008 [consultado el 13 de octubre de 2008] disponible en internet: http://www.microchip.com/wwwproducts/Devices.aspx?dDocName=en010280
Como recomendación también, se estableció que los pines que no iban a utilizarse deberían ir conectados a Vdd con una resistencia de 10kΩ Para disminuir los posibles picos indeseados de voltaje se tomaron medidas como la de aislar completamente el circuito de potencia del circuito lógico, además de colocar un pequeño banco de condensadores entre la tierra del sistema y Vdd. Ver planos esquemáticos de los circuitos impresos en el anexo 3.

82
9.7.5. Circuito de potencia. Para procesar el PWM generado por el microcontrolador y cambiarlo por un nivel de voltaje que provenga directamente de la batería para que tenga una buena potencia, se eligió comprar un driver prediseñado para motores DC. Para esto, se encontró el driver dual VNH2SP30, de la compañía Pololu, que cuenta con unas ciertas características (ver tabla 13.) cumpliendo con lo requerido para el correcto funcionamiento del sistema eléctrico, como aceptar la corriente máxima consumida por los motores, la frecuencia del PWM generado y tener capacidad para manejar 2 motores al mismo tiempo. Tabla 15. Especificaciones técnicas del driver dual VNH2SP30
PARAMETRO MEDIDA Capacidad de motores 2 Voltaje mínimo de operación 5.0 V Voltaje máximo de operación 16 V Salida de corriente continua por canal 14 A Salida de corriente Pico por canal 30 A Salida continua paralela de corriente 25 A Frecuencia máxima de PWM 20 kHz Protección para voltaje inverso? SI
Además de estas excelentes características, tiene un tamaño reducido (ver Ilustración 54), lo que es aun mejor para el reducido interior del robot. Ilustración 54. Driver dual VNH2SP30
Para tener un claro concepto también fueron analizados los planos esquemáticos proporcionados por el fabricante, que se pueden observar en el anexo 3.

83
10. PROTOTIPADO El proceso de prototipado se realizo en varias ocasiones a través de todo el proceso de diseño concurrente para validar ciertas partes o conceptos a seleccionar en el robot. Se realizaron prototipos parciales tanto físicos como analíticos, para poder finalmente realizar un prototipo alfa completamente funcional. Ilustración 55. Tipos de prototipo realizados
Para el desarrollo completo del robot fue necesario realizar prototipos analíticos en la selección de conceptos, prototipos físicos y virtuales del soporte de la esfera, de la carcasa y de los sistemas electrónicos y finalmente el prototipo alfa. A continuación se muestra que prototipos fueron realizados en el proceso de diseño del robot y en algunos casos se describe el proceso con el cual se realizo el prototipo.
Analitico
Completo Parcial
Prueba de Conceptos
Soporte de la esfera
Circuitos en protoboard
Prototipo ALFA
Soporte esfera
Fisico Carcasa
RoboCuy
Carcasa
Circuitos simulados

84
10.1. PRIMER PROTOTIPO Es de mencionar, que previo al inicio del diseño del robot, ya se había realizado un prototipo previo sin ningún tipo de diseño estructurado con el fin de ingresar en una competencia de robots buscaminas basado en la idea de tener un movimiento aleatorio guiado por un ratón o hámster. Ilustración 56. Primer prototipo incompleto
Esto llevo a la culminación de un robot que cumplía con pocos de los requerimientos del cliente y por tanto era muy poco útil y funcional. Sin embargo, de esta experiencia se adquirió gran conocimiento, debido a que se conocieron algunos procesos de manufactura, se estudiaron algunos conceptos de diseño y finalmente se pudieron tomar consideraciones como que el factor peso y su fácil manipulación, son requerimientos muy importantes a tener en cuenta para el diseño de un robot. Este primer prototipo fue evaluado por el ingeniero Bernardo Sabogal y de sus criticas y concejos se obtuvieron varios de los requerimientos usados en el proceso de diseño de el actual robot.

85
Ilustración 57. Primer prototipo
10.2. PROTOTIPOS DE LA SELECCIÓN DE CONCEPTOS Al realizar una extensa generación de conceptos, se requiere de un proceso cauteloso para su selección, debido a que cada concepto debe ser analizado completamente y en conjunto a los otros conceptos, es por esto que se realizaron varios modelados de los conceptos en conjunto con otros en función de hacer una depuración mas valida. Estos fueron 5 prototipos analíticos parciales. Ilustración 58. Prototipos de la selección de conceptos

86
10.3. PROTOTIPO DE LA BASE DE LA ESFERA Otra necesidad que se tuvo de realizar un prototipo fue en el diseño de la base que soportaría la esfera en donde iría ubicado el hámster, debido a que se proponían varias ideas para esto pero era cuestión de disminuir la fricción, dar mas visibilidad, ocupar menos espacio y tener un buen aspecto estético. Por esto, primero se construyo un modelo de lo que podría ser el soporte, en balso, con puntillas pero con los ball-casters que se iban a utilizar finalmente ya que estas eran partes prefabricadas. Ilustración 59. Primer prototipo físico del soporte de la esfera
Con este prototipo ya realizado, se encontró que esta era una forma muy eficiente de dar soporte a la esfera por lo que se prosiguió con un diseño mas detallado a nivel de modelado tridimensional en el programa Solid Edge, ahora tomando en cuenta que también debería estar incluido en este soporte, unas bases para los encoders que también son piezas prefabricadas. Ilustración 60. Prototipo analítico del soporte de la esfera

87
Finalmente, teniendo las dimensiones claramente definidas y un modelo digital del soporte de la esfera, se decidió subcontratar una empresa dedicada a procesos relacionados con el acrílico, en donde se realizo un prototipo completo de esta parte en acrílico transparente. Ilustración 61. Prototipo físico del soporte de la esfera
10.4. CARCASA 10.4.1. Prototipo analítico de la carcasa. Como ya se había mencionado, se diseño una carcasa ovalada siguiendo el diseño de la base y para tener un aspecto futurista pero a la vez similar a un ratón. El modelo tridimensional fue realizado en el programa Solid Edge con las medidas reales de cómo debería ser cada una de sus partes y las distancias de los agujeros en donde iría la esfera, las llantas y el interruptor de encendido. Ilustración 62. Prototipo analítico de la carcasa.

88
10.4.2. Proceso de fabricación de carcasa en fibra de vidrio. Para el desarrollo del prototipo físico de la carcasa, se presentaron bastantes inconvenientes, debido a que por sus formas ovaladas no lo podían desarrollar en ningún taller especializado en estos trabajos o era extremadamente costoso. Por este motivo se decidió realizar la carcasa en fibra de vidrio manualmente. Este proceso es un poco artesanal pero fue registrado como parte del desarrollo del prototipado en el diseño concurrente. Lo primero que se debe tener es la idea clara o los planos de que es lo que se va a realizar. A partir de esto, se genero un molde que se hizo en icopor por su fácil moldeo, pero teniendo en cuenta que había que cubrirlo posteriormente con papel autoadhesivo o con algún aislante debido a que los químicos para el trabajo en fibra de vidrio lo desintegran. Ilustración 63. Molde en icopor de la carcasa sin terminar
Teniendo ya el molde terminado, forrado y con las medidas necesarias, se prosigue a preparar la mezcla de la fibra de vidrio. Para esto, se necesita resina de poliéster, catalizador y algunos metros de tela de fibra de vidrio. Se vierte la resina de poliéster en un recipiente plástico y se añade catalizador en la medida indicada por el fabricante (en este caso fue el 2% de catalizador por 98% de resina). Una vez hecha esta mezcla, se tienen alrededor de 5 minutos para vertirla sobre la fibra de vidrio e irla pegando al molde por todos los lados. Es importante tener en cuenta que para todo este proceso se deben usar elementos de seguridad tales como gafas, tapabocas y guantes ya que los gases emitidos o la fibra de vidrio pueden ser irritantes para el cuerpo humano.

89
Ilustración 64. Proceso de realización de mezcla para la fibra de vidrio.
Ya una vez cubiertos todos los lados del molde con la fibra de vidrio humedecida por la mezcla, se debe dejar el molde en un lugar fresco ventilado por alrededor de 12 horas, tiempo en el cual, esta fibra se secara quedando bien rígida y resistente. Es posible ponerle otras capas de fibra de vidrio pero en este caso con una fue suficiente porque no se necesitaba una carcasa tan gruesa. Se debe retirar el molde procurando no dañarlo ni dañar la carcasa creada. Teniendo ya la carcasa sin el molde, se pueden agregar los detalles como el soporte de la batería y las extensiones para los tornillos, además, se debe realizar

90
los cortes y redondeados de los bordes en donde va ubicada la esfera y van ubicadas las llantas. Ilustración 65. Carcasa sin pulir
La carcasa en principio puede parecer un poco rustica, pero a continuación se debe, mediante una pulidora, alizar su superficie dándole la forma y textura deseada para después proceder con la pintada de esta. Para este caso, decidimos aplicarle pintura blanca que da un toque más futurista y tecnológico al robot. Ilustración 66. Prototipo final de la carcasa en fibra de vidrio

91
10.4.3. Consideraciones finales de la carcasa. La carcasa debe tener 6 puntos de sujeción respecto a la base del robot, estos puntos deben ser firmes y deben tener la rosca o la tuerca fija para ser atornillados desde la parte de abajo del robot sin necesidad de meter la mano para colocar una tuerca o sin necesidad de un mayor esfuerzo. En la parte trasera de la carcasa debe haber un agujero rectangular con medidas exactas de 1.5 x 2.2 cm, esto para poner el interruptor de encendido. Por las irregularidades de la carcasa y para que tenga una buena presentación al momento de colocarse en la base, se dispuso de “Instant Stik Foam Tape” en todo el borde de la base para que se acoplara perfectamente y no quedaran desniveles ni agujeros. 10.5. PROTOTIPOS DEL SISTEMA ELECTRONICO Para el desarrollo del sistema electrónico se desarrollaron gran variedad de prototipos, ya que realizando el estudio y análisis de que microprocesador seria la mejor opción, se programaron y analizaron 3 tipos de microprocesadores para 2 de los cuales se realizo prototipo virtual. Primero se intento hacer el programa en el microprocesador ATMEL 89C52 pero por mas que se intento optimizar el programa solo se puso realizar implementando dos micros debido a la cantidad de interrupciones. Ilustración 67. Simulación del circuito utilizando 2 micros AT89C52

92
Se realizaron además algunas pruebas con un dsPIC que integra las funciones de un microcontrolador con las de un procesador digital de señales. Para estas pruebas fue necesario realizar el montaje del circuito necesario para el funcionamiento del dsPIC33FJ128MC202, pero debido a su gran complejidad y su alto costo se desechó la idea de trabajar con este. Ilustración 68. Prototipo físico electrónico del circuito para dsPIC
Finalmente, gracias a la consulta con expertos y el análisis de las grandes capacidades que tenía el PIC 18F2550 y por las posibilidades de agregar futuras funciones adicionales, se decidió utilizarlo definitivamente como procesador del robot. Para este microprocesador, se realizaron tanto prototipos analíticos, virtuales como montajes en protoboard y finalmente el montaje en la plaqueta tal y como debería quedar en el producto final. Para la realización de la plaqueta final, se realizo todo el proceso para esto, desde la simulación del circuito en el programa ISIS Proteus, pasando por el diseño de la tarjeta en el programa EAGLE simulándolo inclusive en modo tridimensional (ver ilustración 70) y finalmente plasmando el ruteado en una plaqueta de cobre para circuitos pudiendo después soldar sus componentes y dejar un circuito perfectamente terminado y funcional.

93
Ilustración 69. Simulación 3D del circuito digital

94
11. RESULTADOS FINALES
Finalmente y a causa de una correcta aplicación del diseño concurrente, se obtuvo el prototipo alfa de lo que puede ser considerado tanto un juguete como un robot móvil de ultima generación. Se cuenta con un prototipo virtual que se puede observar en la ilustración 70. Y el prototipo físico que es completamente funcional y del cual se puede observar su fotografía en la ilustración 71. Además, se realizo un Manual de usuario para su fácil utilización el cual se puede encontrar en el anexo A. Ilustración 70. Prototipo virtual del Robot

95
Ilustración 71. Foto del robot construido completamente funcional

96
12. CONCLUSIONES Con el presente proyecto se implementó el método de diseño concurrente para el desarrollo de un robot móvil orientado al entretenimiento animal y humano. Dando como resultado un juguete robótico con grandes cualidades y capacidades para competir en el mercado actual. El método de diseño concurrente fue aplicado en su totalidad, haciendo un estudio de mercado, generación y selección conceptos, arquitectura del producto, diseño industrial, diseño para manufactura, diseño detallado y finalmente obteniendo el prototipo final, documentando cada una de estas etapas para su posterior referencia. Este método de diseño concurrente se puede utilizar en el desarrollo de cualquier proyecto y nos garantiza un producto final muy confiable y competitivo. Se obtuvo un robot móvil que cumple completamente con todos los objetivos propuestos, brindando entretenimiento tanto al hámster como a las personas que interactúen con este. El robot permite el ingreso de cualquier tipo de hámster y es completamente seguro para este, ya que cuenta con sensores que le previenen de cualquier tipo de colisión en su trayecto. Brinda al hámster comodidad y una divertida alternativa para que este se ejercite. El proceso de diseño del robot aporto un gran conocimiento en áreas como la robótica móvil, el diseño electrónico en microcontroladores y en varios procesos de manufactura, lo que colabora en gran manera con la formación profesional del desarrollador. Este proyecto de grado deja abiertas muchas puertas para la investigación y desarrollo de tecnología orientada a las mascotas y a la juguetería incorporando algunos conceptos novedosos y que pueden generar un gran atractivo en el mercado.

97
13. RECOMENDACIONES Se debe intentar minimizar aun más la fricción de la esfera con los ball-casters que la soportan para que el movimiento del ratón sea aun más natural y se agrande el número de animales que pueden accionar el robot. Tanto para la carcasa como para la base del robot, se deben realizar los moldes para un proceso de inyección de plástico creando grupos o módulos en el mismo molde ya que este proceso aminora considerablemente los costos de fabricación al momento de una producción en masa. En el campo de la robótica móvil las posibilidades de expansión son muy extensas, para futuras investigaciones, se recomienda incursionar en el área de comunicación entre robots móviles para tener un grupo de estos que puedan interactuar entre sí.

98
BIBLIOGRAFÍA Datasheet PIC18F2550, [En Linea] Arizona: Microchip Technology Inc., 2008 [consultado el 13 de octubre de 2008] disponible en intrnet: http://www.microchip.com/wwwproducts/Devices.aspx?dDocName=en010280 Datasheet SHARP GP2Y0A21YK0F [En Linea] Washington: Sharp Electronics Corporation, 2007 [consultado el 15 de agosto de 2008]. Disponible en internet: http://www.sharpsma.com/Page.aspx/americas/en/part/GP2Y0A21YK0F/ Discovery Remote Control Roboquad [En Linea] US: Discovery Store, 2007 [consultado 28 de julio de 2008] Disponible en internet: http://shopping.discovery.com/holiday_gifts.htm GIAMARCHI, Frédéric. Robots Móviles estudio y construcción. Madrid: Paraninfo, 2001. 141 p. GONZÁLEZ VÁZQUEZ, José Adolfo. Introducción a los Microcontroladores. Madrid : McGraw-Hill, 1992. 292 p. HERTZ, Granet. Cockroach Controlled Mobile Robot. [En Linea] California: ConceptLab, 2008 [consultado el 2 de agosto de 2008]. Disponible en Internet: http://www.conceptlab.com/roachbot/ INSTITUTO COLOMBIANO DE NORMAS TÉCNICAS. Normas colombianas para la presentación de trabajos de investigación. Segunda actualización. Santafé de Bogota, D.C.: ICONTEC, 2002. p. 24. NTC 1486 Manipulación de un hámster. El mundo del hámster. [En Línea] Madrid: HamsterDoris. 2005. [consultado el 28 de febrero de 2008]. Disponible en internet: http://www.hamsterdoris.com/manipulacion.htm

99
Moto para hámster [En Linea] Madrid: Daniel Gonzalez, 2008 [consultado el 3 de marzo de 2008] Disponible en internet: http://www.nopuedocreer.com/quelohayaninventado/565/motocicleta-para-hamsters/ Notas de clase de Diseño Mecatronico. Profesor Arnaldo Mendez Pupo, Universidad Autónoma de Occidente. Santiago de Cali, 2006. 43 h. ROJAS ARCINIEGAS, Alvaro Jose y SALAZAR JIMENEZ, Fabian Andres. Diseño y construcción de un robot móvil bioinspirado con sistema de visión artificial. [CD-ROM] Santiago de Cali, 2003. 1 CD-ROM. Trabajo de grado (ingeniero mecatronico) Universidad Autónoma de Occidente. Facultad de Ingenierías. Salud y enfermedades en los hamsters. La guía del Hamster. [En Línea] Barcelona: Peluzzo. 2006. [consultado el 28 de febrero de 2008] Disponible en internet: http://www.peluzzo.com/m_inicio.htm ULRICH, Karl T. y EPPINGER, Steven D. Product design and development. 4 ed. Boston: McGraw-Hill, 2007. 366 p. Wikipedia: la enciclopedia libre [en línea]. Florida: Wikimedia Foundation, 2006. [Consultado 02 de julio de 2007]. Disponible en Internet: http://es.wikipedia.org/wiki/Portada
100
ANEXOS
Anexo A. Manual de usuario

101
MANUAL DE INTRUCCIONES DEL SISTEMA ROBOTICO DE ENTRETENIMIENTO E INTERACCIÓN ENTRE HUMANO Y HÁMSTER
Nota: el hámster se vende por separado

102
PRECAUCIONES DE SEGURIDAD
ADVERTENCIAS:
• Para evitar riesgo de incendios o electrocuciones no exponga este juguete a la lluvia o humedad.
• Para evitar posibles enfermedades bacterianas limpie constantemente el depósito de desechos del juguete.
• Para evitar mal funcionamiento del juguete recargue la batería únicamente con el cargador especificado en el manual.
Notas: • No colocar dos hámsteres simultáneamente en la esfera ya que esto ocasionaría mal
funcionamiento del juguete. • El juguete debe de guardarse en un lugar con una temperatura no mayor a 40º C. • El hámster no debe de permanecer más de 30 minutos en el juguete. • El juguete no debe de ser guardado con el hámster en su interior. • No colocar un animal diferente a un hámster ya que esto accionara mal funcionamiento del
juguete.

103
Descripción general del producto
1 Configuración del juguete
o Inserción de la batería
o Colocación de la carcasa en el juguete
o Colocación del hámster dentro de la esfera
o Colocación del habitáculo en el chasis
o Colocación del depósito de desechos
o Cómo encender el juguete
2 funcionamiento del juguete
o Descripción de las partes del juguete
3 Solución de problemas
o Problemas en el acople de la carcasa
o Problemas con el depósito de desechos
o Problemas de movilidad del juguete
o Asistencia telefónica al cliente

104
DESCRIPCION GENERAL DEL PRODUCTO

105
CONFIGURACION DEL JUGUETE
• Inserción de la batería
o El “robocuy” posee un slot (porta-batería)
especial para la ubicación de la batería de
polímero de litio de dos celdas, esta se
encuentra ubicada en la parte interna de la
carcasa.
La batería debe ser encajada en el porta-batería a
través del agujero que posteriormente albergará la
esfera del hámster

106
o Ya completada la anterior instrucción se procede
a colocar la carcasa en el chasis del juguete. Esta
se sujeta a él mediante tornillos.
La esfera portadora del hámster se introduce en la
base del dispositivo tal como se puede observar
en la grafica. Teniendo en cuenta que la esfera
quede bien balanceada.

107
A continuación, se acopla el depósito para los
desechos orgánicos del hámster mediante un juego
de imanes ubicados en la parte inferior del chasis.
o Una vez ensambladas correctamente
todas las partes, se procede a insertar al
hámster en su esfera, en la cual tendrá
la autonomía del movimiento del
juguete.

108
o Para colocar el juguete en
funcionamiento, se debe pulsar
el botón de encendido, el cual
está ubicado en la Parte
posterior de la carcasa del
juguete.

109
FUNCIONAMIENTO DEL JUGUETE
Este juguete es accionado mediante el movimiento de una esfera la cual a su vez es
gobernada por los movimientos de un hámster.
- Este juguete cuenta con una base
fabricada en acrílico de alta duración
para soportar las diferentes
Situaciones a la cual sea sometido.
- También cuenta con 4 sensores de
proximidad ubicados tres en frente y
uno en la parte posterior, para así
evitar colisiones con el entorno.
- Tiene un recipiente para depositar la
orina producida por el hámster.
- Cuenta con un soporte para la esfera el cual le da la movilidad necesaria para
desplazarse en cualquier sentido.
- El robot se desplazara en la dirección que el ratón se mueva dentro de la esfera con una
velocidad proporcional a la del ratón.

110
SOLUCION DE PROBLEMAS
o Problemas en el acople de la carcasa
Si presenta algún problema con el acople de la carcasa al chasis verifique que los tornillos entren perfectamente en los orificios y que la carcasa no presente ningún desperfecto.
o Problemas con el depósito de desechos
Si el deposito de desechos no se acopla perfectamente revise que en los imanes de acople no exista ningún elemento metálico que interfiera en la unión del deposito y el chasis del juguete.
o Problemas de movilidad del juguete
Si el juguete no se mueve correctamente revise que la rueda omnidireccional no se encuentre bloqueada por ningún elemento,
o Asistencia telefónica al cliente
(57) (2) 396 93 11

111
Anexo B. Planos para piezas del robot

112

113
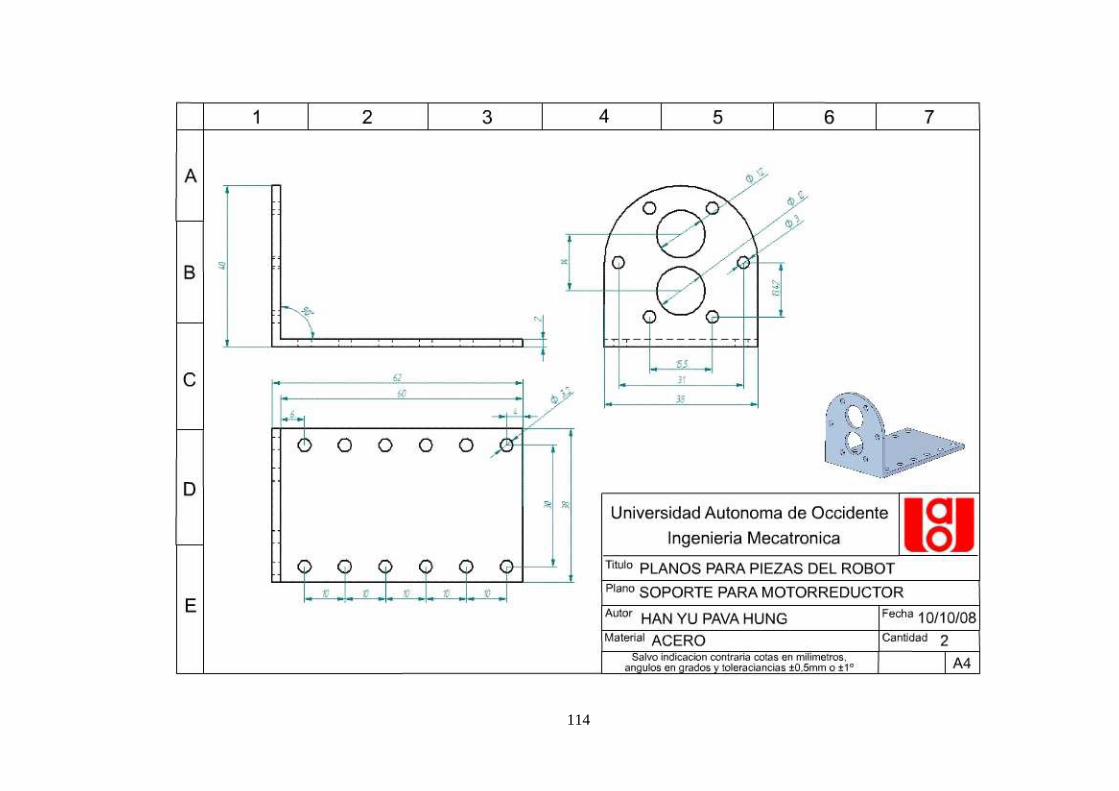
114

115

116

117

118

119

120

121

122

123

124

125

126

127

128

129

130

131
Anexo C. Planos eléctricos

132

133

134


















