Sistemas y Señales...Sistemas Lineales e Invariantes en el Tiempo donde los coeficientes a n (t) y...
17
Sistemas y Señales Dra. Lizeth Torres Ortiz
Transcript of Sistemas y Señales...Sistemas Lineales e Invariantes en el Tiempo donde los coeficientes a n (t) y...
-
Sistemas y SeñalesDra. Lizeth Torres Ortiz
-
Sistemas Lineales e Invariantes en el Tiempo
Se interpreta como el sistema H que opera sobre la señal de entrada para producir una señal de salida, y se denota como
en donde y(t) representa la salida del sistema y x(t) la entrada.
Muchos sistemas y procesos de tiempo continuo relacionan la salida con la entrada medianteecuaciones diferenciales lineales, cuya forma general se expresa como
0 0
( ) ( )( ) ( ) ( )
n nN M
n n fn nn n
d y t d x ta t b t x t
dt dt
( ) { ( )}y t H x t
-
Sistemas Lineales e Invariantes en el Tiempo
donde los coeficientes an(t) y bn(t) pueden depender de la variable independiente t, en cuyo caso correspondea una ecuación diferencial variable en el tiempo, la cual describe un sistema que varía en el tiempo. Si loscoeficientes son constantes, es decir no dependen de t, el sistema es un sistema lineal e invariante en eltiempo.
Se denota como x(t) la entrada al sistema o función de excitación y a xf(t) la función forzada, interpretadacomo la combinación lineal de la entrada x(t) y sus derivadas. Por ejemplo, el modelo del sistema de uncircuito eléctrico resistivo-capacitivo RC de primer orden, está representado por la ecuación integro-diferencial
siendo y(t) la corriente de salida o respuesta del sistema, V(t0) el voltaje almacenado en el capacitor yx(t) el voltaje o entrada del sistema. Al derivar ambos lados la ecuación se obtiene
0
0
1( ) ( ) ( ) ( )
t
t
Ry t y d V t x tC
0 0
( ) ( )( ) ( ) ( )
n nN M
n n fn nn n
d y t d x ta t b t x t
dt dt
-
Sistemas Lineales e Invariantes en el Tiempo
En este caso, la función de entrada es x(t) y la función forzada es xf(t)= dx(t)/dt.
( ) 1 ( )( )
dy t dx tR y t
dt C dt
-
Respuesta de entrada cero, de estado cero y respuesta total
La respuesta completa o total y(t) de un sistema diferencial LIT consiste de dos soluciones.
y(t)= yzi(t)+yzs(t)
donde yzi(t)es la solución a la ecuación homogénea, llamada función complementaria, respuestanatural, respuesta libre, respuesta transitoria (no siempre correcta), o respuesta de entrada cero. Estarespuesta se debe exclusivamente a las energías almacenadas en los elementos del sistema.
Por otro lado, yzs(t) es la respuesta de la ecuación diferencial no homogénea debida a una entradaparticular, es decir, a la función forzada, xf(t) y se le llama solución particular, respuesta en estadoestable, respuesta permanente (no siempre correcta), respuesta de estado con energía inicial cero,respuesta forzada o respuesta de estado cero, dado que las energías en los elementos se considerancero.
-
Respuesta de entrada cero, de estado cero y respuesta total
La respuesta total de un sistema se puede reescribir como
y(t)= yzi(t)+ yzs(t)
La respuesta de entrada cero yzi(t) de un sistema LIT corresponde a la solución de la ecuación homogenea:
Suponiendo una solución de la forma yzi(t)= est, donde s son constantes a definir, la ecuaciónhomogenea queda como:
0
( )0
nNzi
nn
d y t
dt
1
1 1 0... 0N st N st st st
N Na s e a s e a se a e
-
Respuesta de entrada cero, de estado cero y respuesta total
en donde siempre se obtendrá un polinomio de la forma
que también se puede expresar como
Este polinomio en s es de orden N y se le nombra ecuación característica, cuyas raíces pueden serreales, imaginarias y/o complejas. Para el caso de raíces no repetidas, la respuesta adquiere la forma
1
1 1 0... 0N N
N Na s a s a s a
11 01... 0N NN
N N N
a aas s s
a a a
1
( ) nN
s t
zi n
n
y t C e
-
Respuesta de entrada cero, de estado cero y respuesta total
donde Cn son constantes que dependen de las energías almacenadas en los elementos del sistema y snson las raíces de la ecuación característica.
Para el caso de raíces que se repiten k veces la respuesta es de la forma:
donde sk son la raíces repetidas y k es el número de repeticiones que se presentan.
Considerando el caso de un sistema de tercer orden, la ecuación característica también es de tercerorden y suponiendo que sus raíces son s1, s2= s3, la respuesta de entrada cero es de la siguiente forma:
1
1
( ) kk
s tn
zi n
n
y t C t e
1 2 2
1 2 2( )s t s t s t
ziy t C e C e C te
-
Respuesta de entrada cero
EJEMPLO: Considere el circuito RL de primer orden (sólo incluye un elemento que almacena energía).Determine la respuesta de entrada cero si la corriente almacenada en el inductor en t = 0 es I0.
El modelo de este circuito está dado por:
Este circuito almacena energía debido al inductor, y no tiene excitación alguna, por lo que sóloincluye la respuesta de entrada cero izi(t).
Como se mencionó anteriormente, las funciones exponenciales cumplen como respuesta para lasecuaciones diferenciales homogeneas, donde s es una constante a determinar, de manera que sii(t)= est entonces di/dt = sest, las cuales al sustituirlas en la el modelo del circuito queda
di(t)L + Ri(t)= 0
dt
st stLse + Re = 0
i(t)
-
o bien (Ls + R)est =0
Ya que est no puede ser cero, obtenemos Ls + R =0, i.e. s=-R/L. Así que la respuesta de entrada cero es
donde la constante C depende de la condición inicial en t = 0, por lo que en este tiempo se evaluá la ecuación
i(0) = I0= C. De manera que la respuesta total, para este caso en particular, es la respuesta de entrada cero
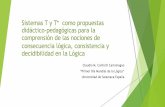
Respuesta de entrada cero
R- tL
zii (t)= Ce
R- tL
zi 0i(t)= i (t)= I eLa cual tiene la forma de unaexponencial decreciente que inicia enI0 y que decae con una constante detiempo L/R como se muestra en lafigura
-
Respuesta de entrada cero
EJEMPLO: Considere un sistema masa resorte (oscilador armónico) descrito porla siguiente ecuación diferencial:
(t)mx +kx(t)= 0
1
2
2
2
2
2
2 2 2
m s X(s) - sX(0)- X(0) = 0
ms X(s) - msX(0)- mX(0)= 0
X(s) ms +k - msX(0)- mX(0)= 0
X(s) ms +k = msX(0)+mX(0)
msX(0)+mX(0)X(s)=
ms +k
sX(0)+ X(0) sX(s)= X(0) X(0)
k k ks + s + s +m m m
SOLUCIÓN: Paso 1. Calculamos la transformada de Laplace
Para la solución consideramos la transformadainversa de Laplace de las siguientes funciones:
{ (t) }mx +kx(t)= 0
1
2 2
1
2 2
1 1sin( )
cos( )
ats a a
sat
s a
-
Respuesta de entrada cero, de estado cero y respuesta total
SOLUCIÓN: Paso 2. Se obtiene la transformada inversa de
1 1( ) ) 0
1( ) cos (0) sin (0) ( )
/
2 2
k km m zi
sX s X(0) X(0
k ks + s +m m
x t t x t x x tk m
1
2 2
1
2 2
1 1sin( )
cos( )
L ats a a
sL at
s a
-
Respuesta transitoria y respuesta permanente
La respuesta en el tiempo de un sistema consta de dos partes: la respuesta transitoria y la respuesta en estado estable o también llamada en régimen permanente.
Se entiende por respuesta transitoria a la que va del estado inicial al estado final. Por respuesta permanente se entiende la forma en la cual la salida del sistema se comporta cuando t → ∞.
-
Respuesta al impulso y respuesta de estado cero
1. Se determina la respuesta de entrada cero 𝑦𝑧𝑖 𝑡 .
2. Con la ecuación anterior se determina la respuesta al impulso ℎ(𝑡, 𝜏) = ℎ(𝑡 − 𝜏), para sistemas lineales einvariantes en el tiempo, mediante la ecuación:
ℎ(𝑡 − 𝜏) = 𝑦𝑧𝑖 𝑡 − 𝜏 𝑢(𝑡 − 𝜏)
3. Con la cual se calcula la respuesta de estado cero 𝑦𝑠𝑡(t), con la ecuación
𝑦𝑧𝑠 𝑡 = −∞
∞
𝑥 𝜏 ℎ 𝑡 − 𝜏 𝑑𝜏
4. Quedando la respuesta total a una entrada x(t) como
𝑦 𝑡 = 𝑦𝑧𝑖 𝑡 + 𝑦𝑧𝑠(𝑡)
-
Ejemplos
Considere un circuito RL de primer orden. Si la excitación es un escalón x(t) = Vu(t). Determine para lacorriente i(t) las respuestas
a) de entrada cero, izi(t)
b) de estado cero, izs(t)
c) total, i(t)
Paso 1: Solución a la ecuación homogénea:
Paso 2: Respuesta al impulso [ℎ𝑓(𝑡 − 𝜏) = 𝑦𝑧𝑖 𝑡 − 𝜏 𝑢(𝑡 − 𝜏)] ℎ 𝑡 − 𝜏 = 𝑖(0)𝑒−𝑅
𝐿𝑡−𝜏 𝑢(𝑡 − 𝜏)
Paso 3: Respuesta al estado cero 𝑖𝑧𝑠 𝑡 = −∞∞
𝑥 𝜏 ℎ 𝑡 − 𝜏 𝑑𝜏 𝑖𝑧𝑠 𝑡 = −∞∞
𝑉𝑢 𝜏 𝑖(0)𝑒−𝑅
𝐿𝑡−𝜏 𝑢 𝑡 − 𝜏 𝑑𝜏
𝑖𝑧𝑖 𝑡 = 𝑖(0)𝑒−𝑅𝐿𝑡
-
Ejemplos
Se definen los límites de la integral sabiendo que
𝑢 𝜏 = 1, 𝜏 00, 𝜏 < 0
y
𝑢 𝑡 − 𝜏 = 𝑓 𝑥 = 1, 𝑡 − 𝜏 0; 𝜏 𝑡0, 𝑡 − 𝜏 < 0; 𝜏 > 𝑡
y se toman los límites en la integral para los cuales 0 < 𝜏 < 𝑡, obteniendo
𝑖𝑧𝑠 𝑡 = 0
𝑡
𝑉𝑖(0)𝑒−𝑅𝐿(𝑡−𝜏) 𝑑𝜏
𝑖𝑧𝑠 𝑡 = 𝑉𝑖(0)𝑒−𝑅𝐿𝑡
0
𝑡
𝑒𝑅𝐿𝜏𝑑𝜏 =𝑉𝑖(0)𝑒−
𝑅𝐿𝑡
𝐿
𝑅𝑒𝑅𝐿𝜏 0
𝑡
-
Respuesta de estado cero y respuesta al impulso
o bien la respuesta de estado cero queda
𝑖𝑧𝑠 𝑡 = 𝑉𝑖(0)𝐿
𝑅1 − 𝑒−
𝑅𝐿𝑡 𝑢 𝑡
Paso 4: Una vez determinada la respuesta de estado cero, obtenemos la respuesta total
𝑖 𝑡 = 𝑖𝑧𝑖(𝑡) + 𝑖𝑧𝑠 𝑡
𝑖 𝑡 = 𝑖(0)𝑒−𝑅𝐿𝑡 + 𝑉𝑖(0)
𝐿
𝑅1 − 𝑒−
𝑅𝐿𝑡 𝑢(𝑡)