PROYECTO DE CONECTIVIDAD DIGITAL RURAL SUBTEL – FDT-ENTEL - MINAGRI.
Apuntes de regulación Automática. Prácticas y Problemas.
- 1 -
TEMA 4. CARACTERISTICAS DE LAS FDT: CEROS Y POLOS. TRANSFORMADA DE LAPLACE.
OBJETIVOS. Los diagramas de bloques permiten representar sistemas como las FDT, la FDT es un polinomio en s, que utiliza Transformadas de Laplace y ecuaciones diferenciales. Vamos a ver distintas formas de la FDT, y la utilidad de cada una de las representaciones. Se introduce la respuesta impulsional de los sistemas.
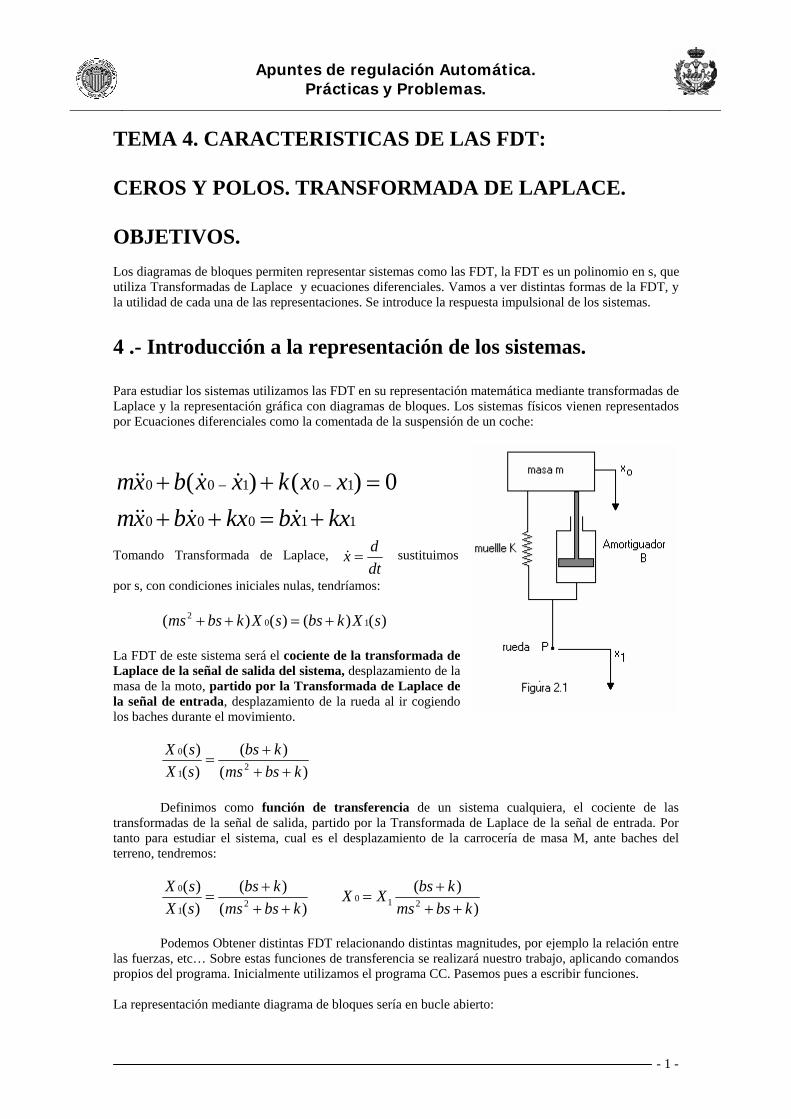
4 .- Introducción a la representación de los sistemas. Para estudiar los sistemas utilizamos las FDT en su representación matemática mediante transformadas de Laplace y la representación gráfica con diagramas de bloques. Los sistemas físicos vienen representados por Ecuaciones diferenciales como la comentada de la suspensión de un coche:
11000
10100 0)()(kxxbkxxbxmxxkxxbxm
+=++=+ −−
&&&&
&&&& +
Tomando Transformada de Laplace, sustituimos
dtdx =&
por s, con condiciones iniciales nulas, tendríamos:
)()()()( 10
2 sXkbssXkbsms +=++
La FDT de este sistema será el cociente de la transformada de Laplace de la señal de salida del sistema, desplazamiento de la masa de la moto, partido por la Transformada de Laplace de la señal de entrada, desplazamiento de la rueda al ir cogiendo los baches durante el movimiento.
)()(
)()(
21
0
kbsmskbs
sXsX
+++
=
Definimos como función de transferencia de un sistema cualquiera, el cociente de las
transformadas de la señal de salida, partido por la Transformada de Laplace de la señal de entrada. Por tanto para estudiar el sistema, cual es el desplazamiento de la carrocería de masa M, ante baches del terreno, tendremos:
))(
)()(
)()(
21021
0
kbsmskbsXX
kbsmskbs
sXsX
+++
=++
+=
Podemos Obtener distintas FDT relacionando distintas magnitudes, por ejemplo la relación entre
las fuerzas, etc… Sobre estas funciones de transferencia se realizará nuestro trabajo, aplicando comandos propios del programa. Inicialmente utilizamos el programa CC. Pasemos pues a escribir funciones.
La representación mediante diagrama de bloques sería en bucle abierto:

Apuntes de regulación Automática. Prácticas y Problemas.
- 2 -
El diagrama de bloque se puede modificar en la forma
)()(1
)()(
)()(
)()(
)()(
)()(
)(
)()(
)()(
2
2
22
2
2
2
2
2
21
0
mskbs
mskbs
mskbs
msms
mskbs
mskbsms
mskbs
kbsmskbs
sXsX
++
+
=+
+
+
=++
+
=++
+=
Que corresponde a un diagrama de bloques, qye puede modificarse en otras formas:
4.1.- Funciones de Transferencia. CEROS Y POLOS.
Se define FDT al cociente de polinomios de cualquier grado en s, correspondientes al cociente de transformadas de Laplace, de las señales de salida, partido por la entrada. Se representa la FDT como un polinomio en s, en la forma: )(
1
2 sG=ΘΘ
En una ecuación dada en s como G(s) = s3 + 6s2 + 11s + 6
Las raíces de la ecuación, o soluciones que obtenemos al descomponer en producto de polinomios, más sencillos, decimos que el polinomio tiene una raíz de valor –1, puesto que al dividir por s+1 se obtiene:
( s – ( -1 ) ) = ( s + 1 ) y otra en -3
( s – ( -3 ) ) = ( s + 3 ) y otra en -2
( s – ( -2 ) ) = ( s + 2 )
Obtenemos una división exacta, y un resto cero, escribimos las raíces como la variable, menos la raíz. Al seguir dividiendo tenemos todas las raíces: –1, –2 y –3 ; ( s + 1) ( s + 2 ) ( s + 3 ) .
De las raíces que obtenemos para una FDT.
• Denominamos ceros de la función de transferencia, a las raíces del numerador de la FDT • Polos de la FDT las raíces del denominador de la función, de que se trate.
Para una Función de transferencia tal como:
)7)(2()3()(1++
+=
ssssG
Podemos ver que tiene como raíces los valores – 2, –3, y –7
Al escribir una FDT con los polos y ceros, nos quedará
Apuntes de regulación Automática. Prácticas y Problemas.
- 3 -
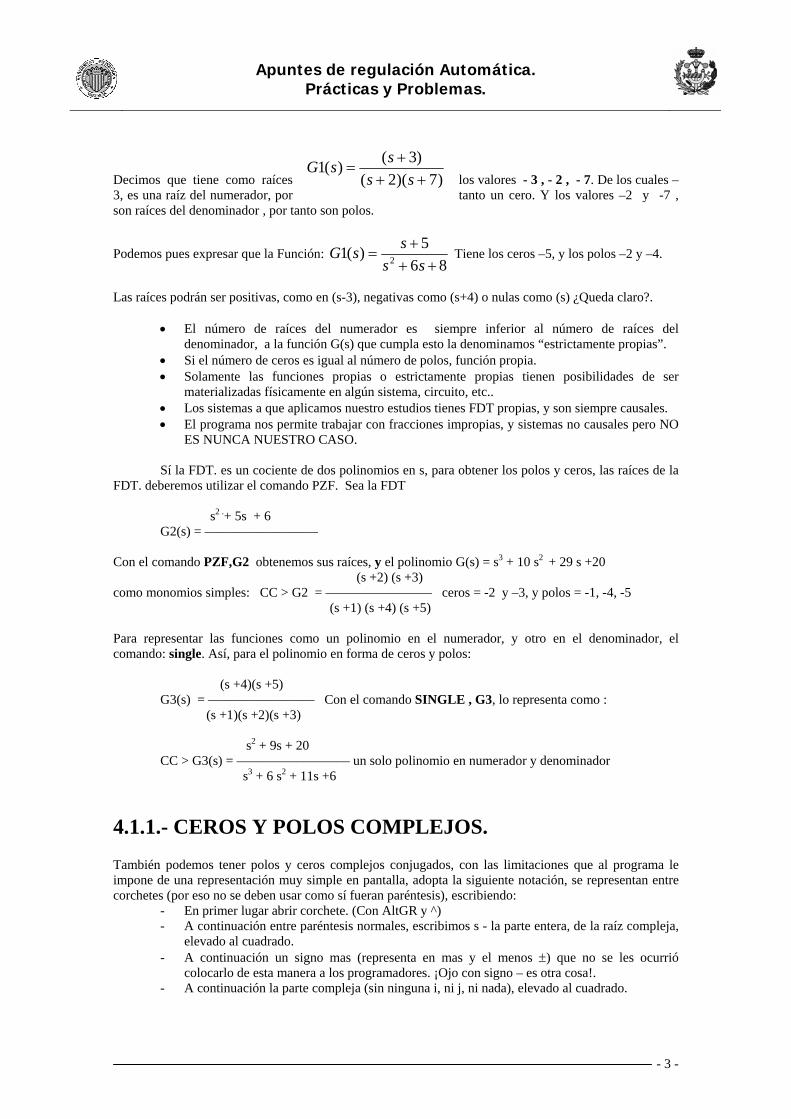
Decimos que tiene como raíces los valores - 3 , - 2 , - 7. De los cuales –3, es una raíz del numerador, por tanto un cero. Y los valores –2 y -7 , son raíces del denominador , por tanto son polos.
)7)(2()3()(1++
+=
ssssG
Podemos pues expresar que la Función: 86
5)(1 2 +++
=ss
ssG Tiene los ceros –5, y los polos –2 y –4.
Las raíces podrán ser positivas, como en (s-3), negativas como (s+4) o nulas como (s) ¿Queda claro?.
• El número de raíces del numerador es siempre inferior al número de raíces del
denominador, a la función G(s) que cumpla esto la denominamos “estrictamente propias”. • Si el número de ceros es igual al número de polos, función propia. • Solamente las funciones propias o estrictamente propias tienen posibilidades de ser
materializadas físicamente en algún sistema, circuito, etc.. • Los sistemas a que aplicamos nuestro estudios tienes FDT propias, y son siempre causales. • El programa nos permite trabajar con fracciones impropias, y sistemas no causales pero NO
ES NUNCA NUESTRO CASO. Sí la FDT. es un cociente de dos polinomios en s, para obtener los polos y ceros, las raíces de la
FDT. deberemos utilizar el comando PZF. Sea la FDT s2 .+ 5s + 6 G2(s) = –––––––––––––––––
Con el comando PZF,G2 obtenemos sus raíces, y el polinomio G(s) = s3 + 10 s2 + 29 s +20
(s +2) (s +3) como monomios simples: CC > G2 = –––––––––––––––– ceros = -2 y –3, y polos = -1, -4, -5
(s +1) (s +4) (s +5)
Para representar las funciones como un polinomio en el numerador, y otro en el denominador, el comando: single. Así, para el polinomio en forma de ceros y polos: (s +4)(s +5)
G3(s) = –––––––––––––––– Con el comando SINGLE , G3, lo representa como : (s +1)(s +2)(s +3) s2 + 9s + 20
CC > G3(s) = ––––––––––––––––– un solo polinomio en numerador y denominador s3 + 6 s2 + 11s +6
4.1.1.- CEROS Y POLOS COMPLEJOS. También podemos tener polos y ceros complejos conjugados, con las limitaciones que al programa le impone de una representación muy simple en pantalla, adopta la siguiente notación, se representan entre corchetes (por eso no se deben usar como sí fueran paréntesis), escribiendo:
- En primer lugar abrir corchete. (Con AltGR y ^) - A continuación entre paréntesis normales, escribimos s - la parte entera, de la raíz compleja,
elevado al cuadrado. - A continuación un signo mas (representa en mas y el menos ±) que no se les ocurrió
colocarlo de esta manera a los programadores. ¡Ojo con signo – es otra cosa!. - A continuación la parte compleja (sin ninguna i, ni j, ni nada), elevado al cuadrado.

Apuntes de regulación Automática. Prácticas y Problemas.
- 4 -
1 1 Por ejemplo: G3 = ––––––––– Con PZF tenemos las raíces: G3(s) = -------------------- s2 + 2s +5 [(s- (-1)^2+2^2]
Es decir las dos raíces complejas conjugadas, en este caso polos, son: –1 ± 2 j Ejemplos. 1º) ¿Cuales son los polos y ceros de la FDT? : s^2 +5.5s +6
G1(s) = ------------------------- s^3 +9s^2 +20s +12 2º ) Obtener los polos y ceros de la FDT: s^2 +2s +5
G2(s) = ––––––––––––––––– s^3 +12s^2 +44s +48
3º ) Obtener una sola función en numerador y denominador de la FDT: [(s+1)^2+ 2] (s + 5)
G3(s) = –––––––––––––––––––––––––– (s+3)(s+1)(s+2)[(s-6)^2+7^2]
4.1.2.- Otros comandos para representación. CC> WHAT,G2 da que tipo de función es, o si es no FDT, ejemplo con G2
484)(2 2 ++
=ss
sG
dice que es Función de transferencia, constante 2º segundo orden.
CC> SINGLE,G3 )8*42^)(2(
5)(3+++
=ssss
sG uno solo ssss
G16166
13 234 +++=
.CC> Unitary,G3 pone el termino independiente a uno. CC> TCF,G3 Pone el coeficiente del termino de mayor grado en s, a uno. 4.2.- TRANSFORMADA LAPLACE. RESPUESTA IMPULSIONAL Los sistemas físicos son representados mediante ecuaciones diferenciales totales, lineales, de coeficientes constantes, etc..y mediante la Transformada de Laplace pasamos a la relaciones entre transformadas de la Función de Transferencia. Manejando estas relaciones entre las Transformadas de Laplace de las señales de salida y entrada, siempre podemos pasar a la representación temporal, o también obtener la expresión temporal de diversas señales de salida, como respuesta a distintas señales de entrada. Para ello basta con obtener la Transformada de Laplace inversa, o anti transformada. El programa usado, solamente trata con ecuaciones escritas en Transformadas de Laplace, por tanto solo tenemos que escribir ecuaciones en s. Pero podemos pasar a resolver estas ecuaciones, a realizar la Transformada de Laplace inversa, mediante el programa. El comando para obtener la anti transformada de Laplace, es ILT.
Así para s
G 110 = el comando ILT, G10 Indica que es causal, y por tanto 0 para t < 0 y 1 para t > 0.
/ 1 for t>0 G10 (t) = ¦ ¦ 0 for t<0

Apuntes de regulación Automática. Prácticas y Problemas.
- 5 -
Por ejemplo para la función )4)(3(
)2(11++
+=
sssG El comando ILT produce como resultado:
/ ¦ -1*exp(-3t) + 2*exp(-4t) for t>0 G11(t) = ¦ ¦ 0 for t<0
La Transformada de Laplace Inversa, permite pasar a la educación diferencial, y por tanto la función temporal. Si trabajáramos “a mano” es necesario realizar pasos intermedios, calculando la descomposición en fracciones simples. Este paso intermedio de la descomposición en fracciones simples, se realiza mediante el comando PFE
Ejemplo: Dado un sistema de FDT: )12)(1(
1)()()(7 2 +++==
ssssEsOsG
Si queremos calcular la señal de salida O(s) ante una señal de entrada s
sE 1)( =
La FDT era la relación de transformada de la salida dividido por la transformada de la entrada, tenemos:
)1)(1)(1(11)(
)12)(1(1)()( 2 +++
==+++
=ssss
valorsuporsEosutituyendsss
sEsO
Llamamos G11 a la función obtenida: )12)(1(
1111 2 +++=
ssssG
Ahora descomponemos en fracciones simples la ecuación de O(s).
Escribimos PFE,G11 Se obtiene la FDT descompuesta. )1(
1)1(
1)1(
1111 23 +−
+−
++=
ssssG
Obtenemos la función temporal, consultando las tablas, o con el comando, ILT,G11 se obtiene: / | 1 + (-.5t2 – 1t – 1) * exp((-1t)nfor t>0 G11(t)= | | 0 for t < 0 \
A este método de cálculo de la respuesta temporal de un sistema, lo denominamos cálculo de respuesta impulsional de un sistema, ante una entrada dada. Estos comandos permiten realizar también aplicaciones de la respuesta impulsional.
Para el sistema de la figura:
Para obtener la respuesta ante un impulso de altura 1, unidad, y duración infinitamente pequeña, a lo que denominamos impulso unitario, colocado a su entrada escribimos: Se despeja la señal de salida, sustituimos la señal de entrada por su valor, el impulso unitario, cuya transformada de Laplace vale 1. / 1 | 1 for t>0 PFE,G1 O(s)= --- ILT,O(S) =| S | 0 for t<0 \
Mediante este “metodo” obtenemos la respuesta ante cualquier entrada mas compleja, y calcular la respuesta temporal, y posteriormente podemos además representar esta respuesta temporal, ante cualquier tipo de entrada, como por ejemplo ante una entrada en rampa de velocidad, etc..
Así, dado el sistema:

Apuntes de regulación Automática. Prácticas y Problemas.
- 6 -
Para calcular la respuesta temporal ante señale de entrada de valor R(t) = 5t, aplicando el método de la respuesta impulsional.
Comenzamos por escribir la FDT.
13
)()(
+=
ssRsY
La señal de salida en función de entrada, y sustituimos la transformada de la señal de entrada por su valor.
)1(15
135
13)()( 22 +
=+
=+
=sssss
sRsY
La descomposición en fracciones simples, y la Transformada de Laplace inversa, da la señal temporal. / 15 15 15 ¦ ( 15t - 15) + 15*exp(-1t) for t>0 PFE,G1 es G1(s)= ---- - --- + ---- y la inversa ILT,G1 es G1(t)= ¦ s^2 s s+1 ¦ 0 for t<0 \ Con lo que podemos resolver problemas como el que se propone: El objetivo final de la utilización de transformadas de Laplace, es la obtención de la respuesta temporal de los sistemas, aprovechamos que la transformada del impulso unitario es la unidad, para un sistema
cualquiera de FDT G(s), la respuesta del sistema ante una entrada cualquiera sería:
)()()(
sRsYsG =
Para una entrada R(s), igual al impulso unitario, la respuesta del sistema sería:
] ])(.[)().([)( 11 sGLsGsRLtY −− == La transformada inversa es la unidad. El mismo procedimiento podemos aprovechar para obtener cualquier respuesta temporal ante cualquier entrada, la señal temporal de salida ante una entrada en escalón sería:
La señal temporal de salida la calculamos con una entrada δ(s), es decir ] ])(.1[)().().([)( 11 sG
sLsGsRsLtY −− == δ
Esta observación, o aplicación tan sencilla, nos permite utilizar en todos los sistemas, como señal de “disparo” para la obtención de respuesta temporales, la posibilidad de obtener la respuesta como:

Apuntes de regulación Automática. Prácticas y Problemas.
- 7 -
“ la Transformada de Laplace inversa, de la función impulso, multiplicada por la Función de transferencia del sistema propuesta”, dado que la transformada de Laplace de la función impulsional es la unidad”. Esto es lo que podemos aprovechar en la realización de los problemas propuestos. 4.2.1.- Representación gráfica.
La función matemática obtenida, podemos representarla gráficamente en el programa, sin necesidad de realizar cálculos, así mediante el comando TIME, podemos realizar los cálculos de la anti transformada, y la representación gráfica simultáneamente, para conseguir la representación de la señal dada en función del tiempo, partiendo de FDT en que tenemos relación de Transformadas de Laplace.
Así para el sistema 104
8)()()4( 2 ++==
sssRsYG .
En que la señal de entrada es un escalón de altura 6, s
sR 6)( =
La transformada de la salida la calculamos: como
10486
1048*)()( 22 ++
=++
=sssss
sRsY
La descomposición en fracciones simples sería
=++
+=44.651.1
55.131.68.4
ss Y expresión matemática de la respuesta temporal del sistema ante una señal de entrada en
escalón, es
000)44.6exp(51.1)55,1exp(31.68.4
<≥++
tparatparatt
Y la respuesta temporal y su representación gráfica la obtenemos como aplicación de la orden
TIME. Siempre la aplicamos con la opción 4, correspondiente a la señal de cálculo con impulso unitario.
Con 104
86)10 2 ++=
sssG aplicamos TIME, G10, 4, AUTO.
Aplicamos siempre la opción 4, y por defecto asume que el sistema es causal, y por tanto
obtenemos la respuesta causal.
Apuntes de regulación Automática. Prácticas y Problemas.
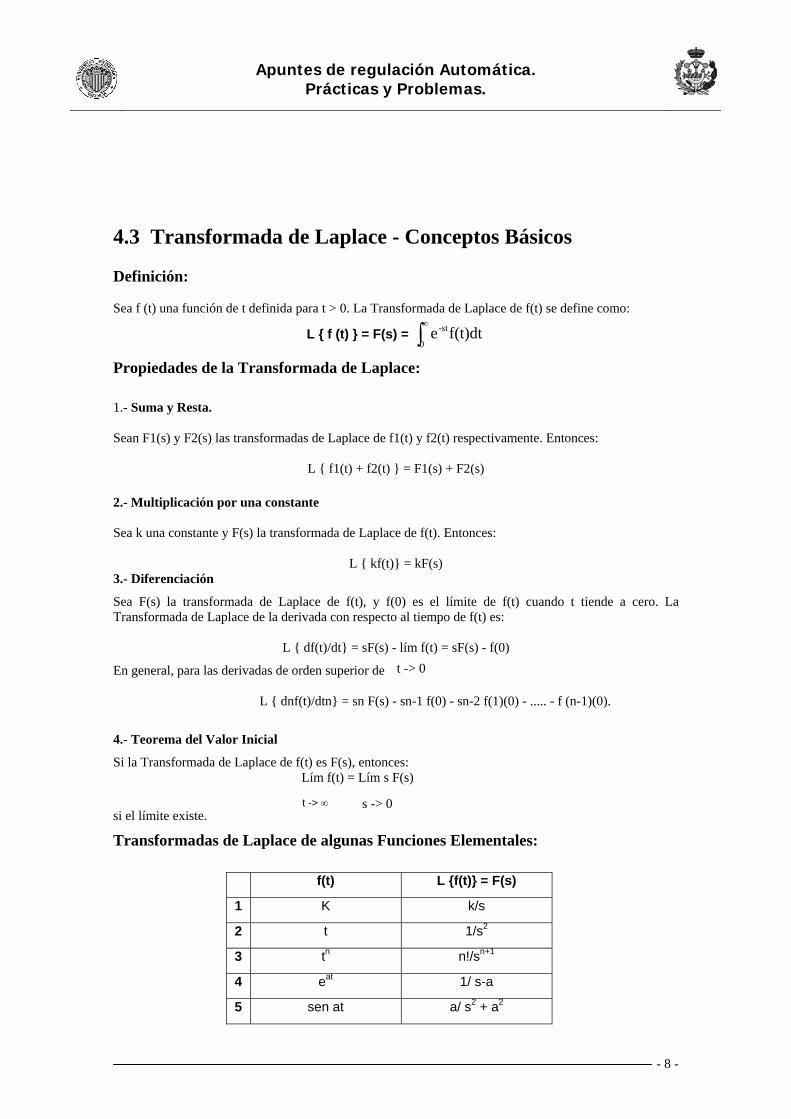
4.3 Transformada de Laplace - Conceptos Básicos Definición: Sea f (t) una función de t definida para t > 0. La Transformada de Laplace de f(t) se define como:
L { f (t) } = F(s) = ∫∞
0
st- f(t)dte
Propiedades de la Transformada de Laplace: 1.- Suma y Resta. Sean F1(s) y F2(s) las transformadas de Laplace de f1(t) y f2(t) respectivamente. Entonces:
L { f1(t) + f2(t) } = F1(s) + F2(s)
2.- Multiplicación por una constante Sea k una constante y F(s) la transformada de Laplace de f(t). Entonces:
L { kf(t)} = kF(s) 3.- Diferenciación
Sea F(s) la transformada de Laplace de f(t), y f(0) es el límite de f(t) cuando t tiende a cero. La Transformada de Laplace de la derivada con respecto al tiempo de f(t) es:
L { df(t)/dt} = sF(s) - lím f(t) = sF(s) - f(0)
En general, para las derivadas de orden superior de f(t): t -> 0 L { dnf(t)/dtn} = sn F(s) - sn-1 f(0) - sn-2 f(1)(0) - ..... - f (n-1)(0).
4.- Teorema del Valor Inicial
Si la Transformada de Laplace de f(t) es F(s), entonces: Lím f(t) = Lím s F(s)
si el límite existe.
Transformadas de Laplace de algun
f(t)
1 K
2 t
3 tn
4 eat
5 sen at
t -> ∞ 0
s ->- 8 -
as Funciones Elementales:
L {f(t)} = F(s)
k/s
1/s2
n!/sn+1
1/ s-a
a/ s2 + a2
Apuntes de regulación Automática. Prácticas y Problemas.
- 9 -
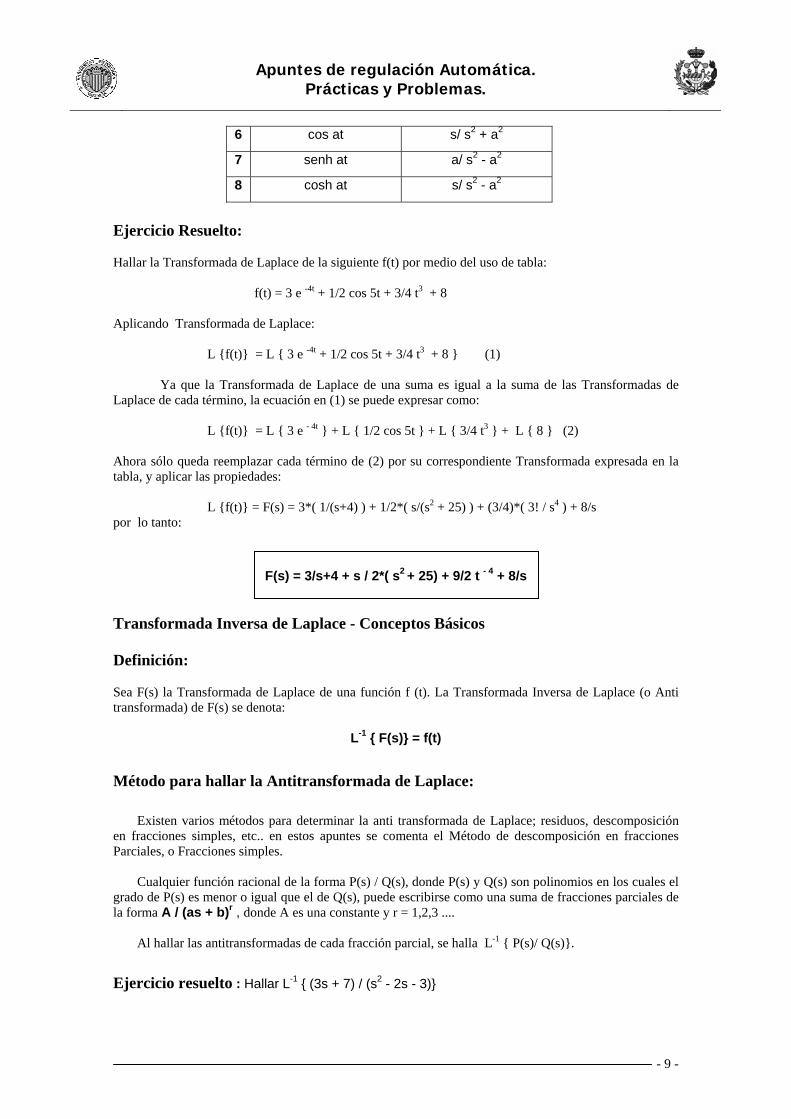
6 cos at s/ s2 + a2
7 senh at a/ s2 - a2
8 cosh at s/ s2 - a2
Ejercicio Resuelto: Hallar la Transformada de Laplace de la siguiente f(t) por medio del uso de tabla:
f(t) = 3 e -4t + 1/2 cos 5t + 3/4 t3 + 8 Aplicando Transformada de Laplace:
L {f(t)} = L { 3 e -4t + 1/2 cos 5t + 3/4 t3 + 8 } (1)
Ya que la Transformada de Laplace de una suma es igual a la suma de las Transformadas de Laplace de cada término, la ecuación en (1) se puede expresar como:
L {f(t)} = L { 3 e - 4t } + L { 1/2 cos 5t } + L { 3/4 t3 } + L { 8 } (2) Ahora sólo queda reemplazar cada término de (2) por su correspondiente Transformada expresada en la tabla, y aplicar las propiedades:
L {f(t)} = F(s) = 3*( 1/(s+4) ) + 1/2*( s/(s2 + 25) ) + (3/4)*( 3! / s4 ) + 8/s por lo tanto:
F(s) = 3/s+4 + s / 2*( s2 + 25) + 9/2 t - 4 + 8/s
Transformada Inversa de Laplace - Conceptos Básicos Definición: Sea F(s) la Transformada de Laplace de una función f (t). La Transformada Inversa de Laplace (o Anti transformada) de F(s) se denota:
L-1 { F(s)} = f(t)
Método para hallar la Antitransformada de Laplace:
Existen varios métodos para determinar la anti transformada de Laplace; residuos, descomposición en fracciones simples, etc.. en estos apuntes se comenta el Método de descomposición en fracciones Parciales, o Fracciones simples.
Cualquier función racional de la forma P(s) / Q(s), donde P(s) y Q(s) son polinomios en los cuales el
grado de P(s) es menor o igual que el de Q(s), puede escribirse como una suma de fracciones parciales de la forma A / (as + b)r , donde A es una constante y r = 1,2,3 ....
Al hallar las antitransformadas de cada fracción parcial, se halla L-1 { P(s)/ Q(s)}.
Ejercicio resuelto : Hallar L-1 { (3s + 7) / (s2 - 2s - 3)}

Apuntes de regulación Automática. Prácticas y Problemas.
- 10 -
Como se ve, es de la forma L-1 { P(s)/ Q(s)}, donde P(s) = 3s + 7 y Q(s) = s2 - 2s - 3; se puede
observar también que el grado de Q(s) > P(s).
El polinomio Q(s) se puede expresar como s2 - 2s - 3 = (s+1)(s-3). Entonces:
3s + 7 3s + 7 A B (1) s2 - 2s - 3 (s - 3)(s + 1) s - 3 s + 1
Multiplicando por (s - 3)(s + 1) se obtiene:
3s + 7 = A (s + 1) + B (s - 3) = (A + B)s + A - 3B (2) Igualando los coeficientes de las potencias iguales de s a ambos lados de la ecuación resultante (2),
hallo los valores de los coeficientes A y B:
A + B = 3
A - 3B = 7
Calculando, resulta A = 4 y B = -1. Reemplazando en (1):
3s + 7 A B 4 1 (3) (s - 3)(s + 1) s - 3 s + 1 s - 3 s + 1
Para hallar la Anti transformada de Laplace, se busca en la Tabla de Transformadas de Laplace y se reemplazan los términos:
L -1 3s + 7 L -1 4 L -1 1
(s - 3)(s + 1) s - 3 s + 1
4 L -1 1 L -1 1
s - 3 s + 1
f (t) = 4 e 3t - e - t
Aplicación de la Transformada de Laplace a las Ecuaciones Diferenciales
La Transformada de Laplace presenta gran utilidad para resolver ecuaciones diferenciales. Si se quiere resolver una ecuación diferencial de segundo orden:
d2y/dt2 + a dy/dt + b y = F(t) o sea y'' + a y' + b y = F(t) (1)
donde a y b son constantes sometidas a ciertas condiciones iniciales o condiciones de frontera
y(0) = A e y'(0) = B (2). Tomando la Transformada de Laplace a cada lado de (1) y usando (2), se obtiene una
ecuación algebraica para determinar L { y(t)} = Y(s). La solución requerida se obtiene al calcular
la antitransformada de Laplace de Y(s).

Apuntes de regulación Automática. Prácticas y Problemas.
- 11 -
Ejercicio resuelto :
Resolver y'' + y = t , con y(0) = 1 , y'(0) = -2. Tomando la Transformada de Laplace en ambos lados de la ecuación diferencial, y
utilizando las condiciones iniciales dadas, se tiene:
L { y''} + L { y } = L { t }
s2 Y(s) - s y(0) - y'(0) + Y(s) = 1/s2
s2 Y(s) - s + 2 + Y(s) = 1/s2
Entonces: Y(s) * [s2 + 1] = 1/s2 + (s - 2)
Despejando Y(s):
Y(s) = [1/s2 + (s - 2)] / [s2 + 1]
Y(s) = 1/s2 - 1/s2 + 1 + s/s2 + 1 - 2/ s2 + 1
Y(s) = 1/s2 + s/s2 + 1 - 3/s2 + 1
Aplicando Antitransformada a cada término:
L -1 {Y(s)} = L -1 {1/s2 + s/s2 + 1 - 3/s2 + 1}
Se obtiene de la tabla:
y(t) = t + cos t - 3 sen t
Apuntes de regulación Automática. Prácticas y Problemas.
- 12 -
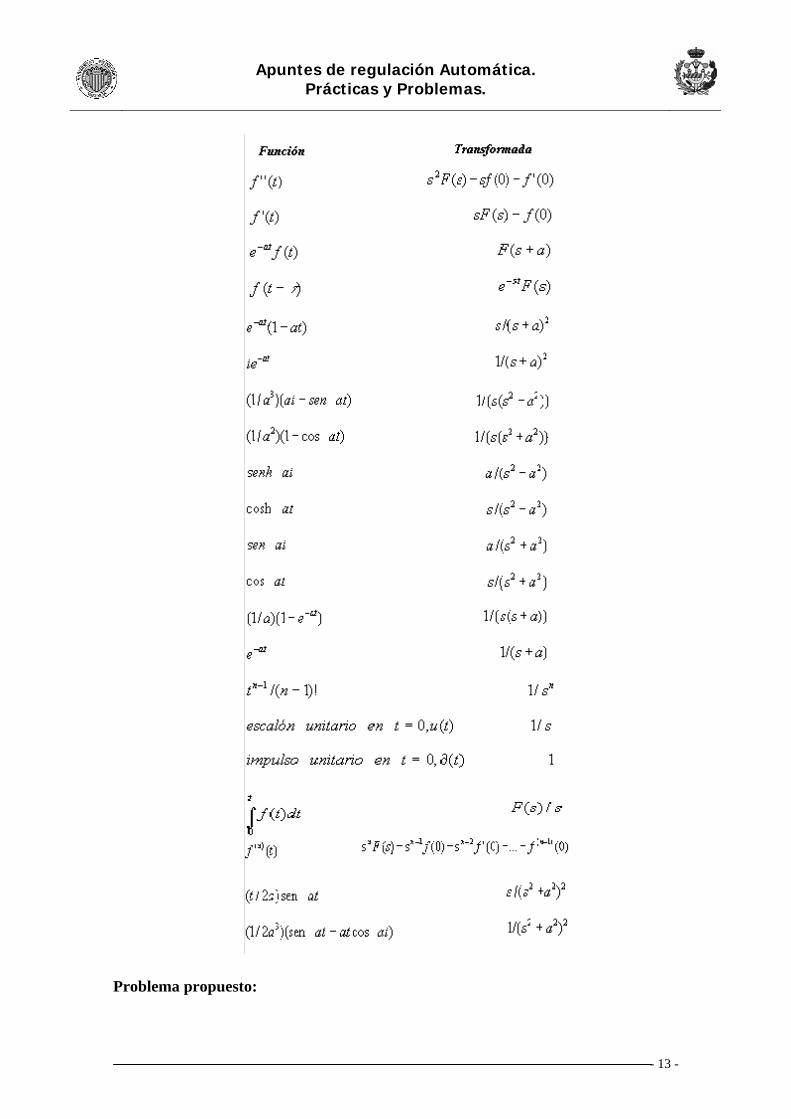
Tabla de transformadas de Laplace
Apuntes de regulación Automática. Prácticas y Problemas.
- 13 -
Problema propuesto:
Apuntes de regulación Automática. Prácticas y Problemas.
- 14 -
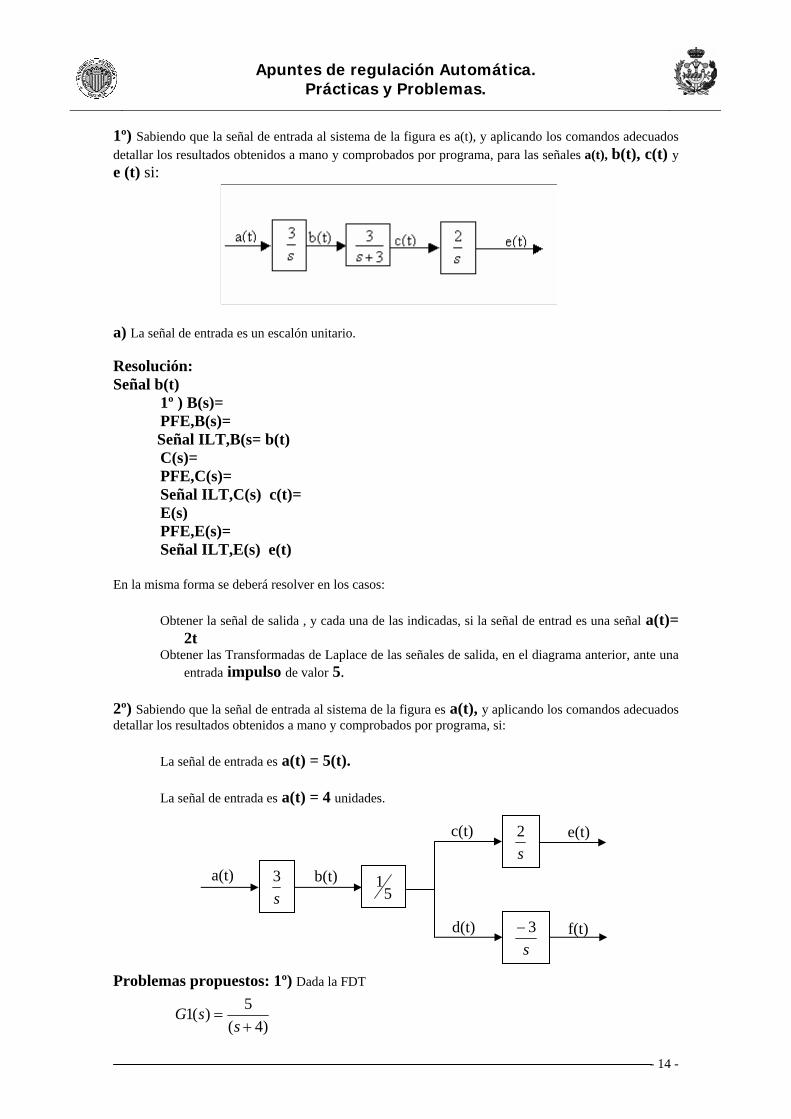
1º) Sabiendo que la señal de entrada al sistema de la figura es a(t), y aplicando los comandos adecuados detallar los resultados obtenidos a mano y comprobados por programa, para las señales a(t), b(t), c(t) y e (t) si:
a) La señal de entrada es un escalón unitario. Resolución: Señal b(t)
1º ) B(s)= PFE,B(s)=
Señal ILT,B(s= b(t) C(s)= PFE,C(s)= Señal ILT,C(s) c(t)= E(s) PFE,E(s)= Señal ILT,E(s) e(t)
En la misma forma se deberá resolver en los casos:
Obtener la señal de salida , y cada una de las indicadas, si la señal de entrad es una señal a(t)= 2t
Obtener las Transformadas de Laplace de las señales de salida, en el diagrama anterior, ante una entrada impulso de valor 5.
2º) Sabiendo que la señal de entrada al sistema de la figura es a(t), y aplicando los comandos adecuados detallar los resultados obtenidos a mano y comprobados por programa, si:
La señal de entrada es a(t) = 5(t).
La señal de entrada es a(t) = 4 unidades.
s3
51
s2
s3−
f(t)
e(t)
d(t)
c(t)
b(t) a(t)
Problemas propuestos: 1º) Dada la FDT
)4(5)(1+
=s
sG

Apuntes de regulación Automática. Prácticas y Problemas.
- 15 -
a) Escribir la expresión temporal de la señal de salida del sistema ante una entrada en escalón unitario .................................................................................................................................... b) Escribir la expresión temporal de la señal de salida del sistema ante una entrada en rampa de valor 2. .................................................................................................................................... c) Cerrar el bucle de G1 con una realimentación negativa y unitaria, obtener la respuesta temporal del sistema ante una entrada en rampa unitaria, por el método de la respuesta impulsional. .................................................................................................................................... d) Representar la respuesta obtenida, para realizarlo mediante la respuesta impulsional, aplicamos la orden:
TIME, G2, 4, AUTO Se supone que G2 es el resultado de realimentar G1 unitaria y negativamente, 2º) Dadas las FDT
)3()2()(4
63)(3
5312)(2
)4(5)(1 2 +
+=
+=
++=
+=
ssssG
ssG
ssSG
sssG
Calcular para cada una de ellas, y comprobarlo mediante el programa CC:
a) Transformada de Laplace de la señal de salida ante una entrada impulso unitario. b) Descomposición en fracciones simples de la anterior propuesta. c) Respuesta ante entrada impulso de valor 5 (respuesta impulsional). d) Valor máximo que alcanzaría la respuesta impulsional anterior a lo largo del tiempo,
calcularla mediante el teorema del valor final, y comprobarla con la representación gráfica.. e) Transformada de Laplace de la señal de salida ante entrada en escalón unitario de amplitud 3
unidades. f) Gráfica de la respuesta temporal del sistema ante entrada en escalón de altura 3 unidades. g) Valor de la señal temporal de salida ante una entrada en rampa de velocidad de valor 3t.
3º) Dada las FDT
211020)( 21 ++
+=
ssssG
53475)( 22 ++
=ss
sG
904811)10()( 233 +++
+=
sssssG
84140698145314)( 234
2
4 ++++++
=ssss
sssG
a) Transformada de Laplace de la señal de salida ante entrada impulso unitario b) Descomposición en fracciones simples de la anterior c) Respuesta ante entrada impulso unitario (respuesta impulsional) d) Valor máximo de la respuesta impulsional e) Transformada de Laplace de la señal de salida ante entrada escalón de amplitud 3 f) Descomposición en fracciones simples de la anterior g) Respuesta ante entrada escalón de amplitud 3 h) Valor de la salida ante escalón de amplitud 3 en t = 2 seg. Se propone resolverlos y comprobar con
resultados den las hojas siguientes.

Apuntes de regulación Automática. Prácticas y Problemas.
-16-
Resolución 2110
20)( 21 +++
=ss
ssG
a) )7)(3(
20)(1 +++
=ss
ssG
b) )7(
25.3)3(
25.4)(1 +−
++
=ss
sG
c) tt eetg 73
1 25.325.4)( −− ⋅−⋅= d)
e) )7)(3(
)20(3)(1 +++
=sss
ssY
f) )7(
392857.1)3(
25.4857143.2)(1 ++
+−
+=sss
sY
g) tt eety 73
1 392857.125.4857143.2)( −− ⋅+⋅−= h)

Apuntes de regulación Automática. Prácticas y Problemas.
-17-
53475)( 22 ++
=ss
sG
a) [ ]222 7)2(75)(
++=
ssG
b) [ ]227
75
2 7)2(7)(++
⋅=
ssG
c) )7sen()( 2
775
2 ttg te−⋅=
d)
e) [ ]222 7)2(225)(
++=
sssY
f) [ ]222 7)2(98113.16245283.4245283.4)(
++−−
+=s
ss
sY
g) ))7sen(285714.0)7cos((245283.4245283.4)( 222 ttty tt ee −− +−=
h)

Apuntes de regulación Automática. Prácticas y Problemas.
-18-
904811)10()( 233 +++
+=
sssssG
a) [ ] )5(3)3()10()( 223 +++
+=
ssssG
b) [ ] )5(3846154.0
3)3(6153846.03846154.0)( 223 +
++++−
=ss
ssG
c) t
tt
eee tttg
5
333
3846154.0
))3sen(533333.1)3cos((3846154.0)(−
−−
⋅+
+⋅−−=
d)
e) [ ] )5(3)3()10(3)( 223 +++
+=
sssssY
f) [ ] )5(2307692.0
3)3(769231.11025641.03333333.0)( 223 +
−+
++−−
+=ss
ss
sY
g) t
tt
eee ttty
5
333
2307692.0
))3sen(750006.4)3cos((1025641.03333333.0)(−
−−
⋅−
−⋅+−=
h)
Apuntes de regulación Automática. Prácticas y Problemas.
-19-
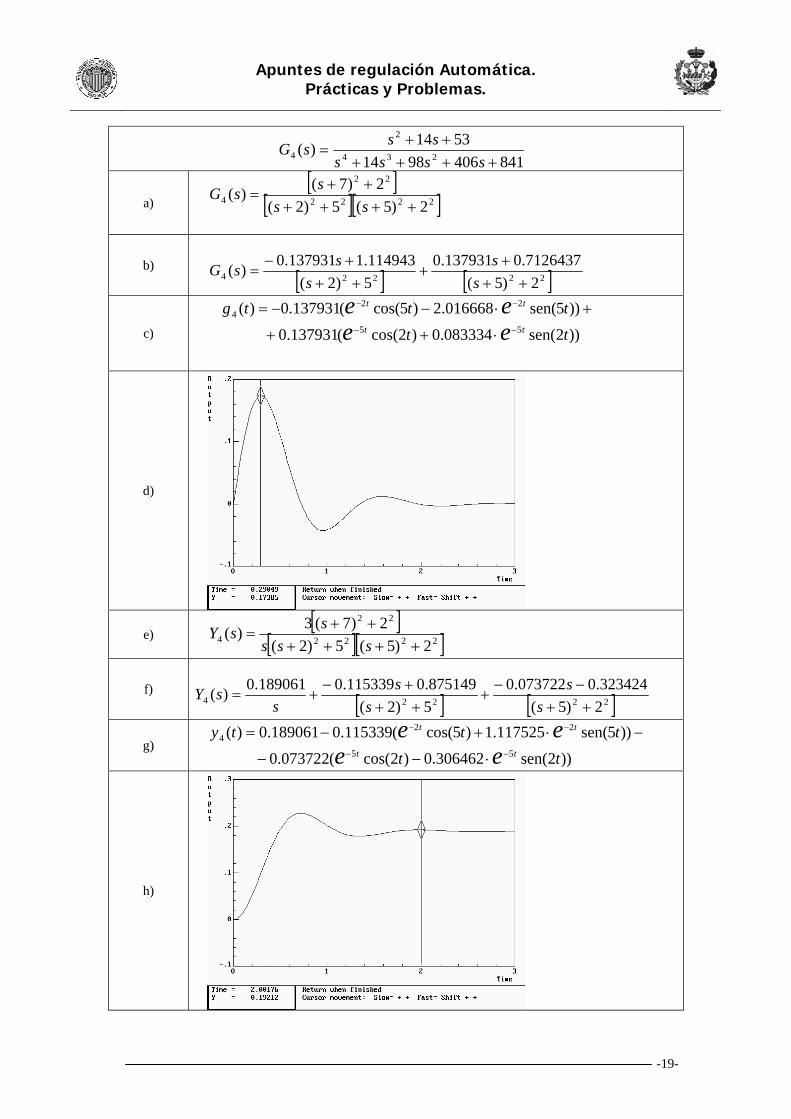
84140698145314)( 234
2
4 ++++++
=ssss
sssG
a) [ ]
[ ][ ]2222
22
4 2)5(5)2(2)7()(
++++++
=ss
ssG
b)
[ ] [ ]22224 2)5(7126437.0137931.0
5)2(114943.1137931.0)(
+++
++++−
=s
ss
ssG
c) ))2sen(083334.0)2cos((137931.0
))5sen(016668.2)5cos((137931.0)(55
224
tt
tttgtt
tt
eeee
−−
−−
⋅++
+⋅−−=
d)
e) [ ]
[ ][ ]2222
22
4 2)5(5)2(2)7(3)(
++++++
=sss
ssY
f)
[ ] [ ]22224 2)5(323424.0073722.0
5)2(875149.0115339.0189061.0)(
++−−
++++−
+=s
ss
ss
sY
g) ))2sen(306462.0)2cos((073722.0
))5sen(117525.1)5cos((115339.0189061.0)(55
224
tt
tttytt
tt
eeee
−−
−−
⋅−−
−⋅+−=
h)

Apuntes de regulación Automática. Prácticas y Problemas.
-20-
Ejemplos: 1º) Escribir la FDT cuyos ceros sean +3 y +2, y como polos –1, –2, –5. 2º) Escribir en formato de edición la FDT que tenga como cero el valor –1, y como polos +1, +2, –3. 3º) Escribir la FDT que tenga como polos, –1 ± 4j y –5.
4º) Escribir una FDT que tenga como ceros –3 y –5 y como polos +2 y -5±4j.
5º) Escribir una FDT que tenga como ceros –1 y –2 y polos -2 ± 2j y –4±3j. 6º) Escribir la FDT que tenga como cero el valor –1, y como polos +1, +2, –3. Y expresar la función final como dos únicos polinomios. (ejemplo anteriormente hecho) 7º) Escribir la FDT que tenga como polos, –1 ± 4j y –5. Escribirla como un solo polinómio (ejemplo ya hecho) 8º) Escribir una FDT que tenga como ceros los valores –3 y –5 y como polos +2 y -5±4j .Expresar el resultado como cociente de dos polinomios. 9º) Escribir una FDT que tenga como ceros los valores –1 y –2 y polos -2 ± 2j y –4±3j Expresar el resultado como cociente de dos polinómios.(ya hecho) 10º) Escribir la FDT G10, que tiene ceros –2 y +3 y polos –1, -3, y –4 . Añadirle a G10 dos polos en –3 ± 6 j y llamar a la función resultante G11.
Escribir la FDT G11 de manera que sea el cociente de solo dos polinomios. Escribir la FDT G11 de manera que el término independiente sea 1
11º) Escribir la FDT G20, que tiene ceros –1, –1 ± 4j y polos –2,-4 y –2 ± 5 j. Añadirle a G20 un polo en –4 ± 7 j y llamar a la función resultante G21.
Escribir la FDT G21 de manera que sea el cociente de solo dos polinomios. Escribir la FDT G21 de manera que el término independiente sea 1

Apuntes de regulación Automática. Prácticas y Problemas.
-21-
Practicas Regulación y automatización máquinas y procesos. * 1º) Escribir la FDT que tiene ceros en -1, -2, polos -5, +2, -3 * 2º) Escribir la FDT que tiene ceros en -2, polos +2, -3 ± 5j
* 3º) ¿Cuáles son los polos y ceros de la FDT? 1928014
86)(10 23 ++++
=sss
ssG
4º) ¿Cuáles son los polos y ceros de la FDT? 1094
9912 23 ++++
=sss
sG
5º) Siendo 6
5)(24
1)(1+
=+
=s
sGs
sG
a) * Calcular G5 = G1 + G2 b) Calcular G6 = G1 * G2 c) *Calcular G7 = G1 | G2
d) Calcular G8 e) Calcular G9
6º) ¿Cuales son los polos y ceros de la FDT G7 del apartado 6 c) ?
*7º) Dada la FDT 1094
912 23 +++=
sssG calcular:
a) La expresión de f(t), respuesta temporal ante una entrada impulso unitario. b) Obtener la Trasformada de Laplace de señal de salida si la señal de entrada es un escalón de
altura 2 unidades. c) Descomponer en fracciones simples la expresión de la trasformada de Laplace de la señal de
salida anterior. d) Identificar los términos obtenidos anteriormente con los que obtiene en la expresión de f(t),
respuesta temporal, ante una entrada escalón de altura 2 unidades. e) Representar gráficamente, con TIME, la señal de salida obtenida en el apartado d). f) Calcular por el teorema del valor final, el valor de la señal de salida representada anteriormente
al cabo de 500 segundos, y comprobarlo con la señal representada en e).
8º) Encontrar la solución de la ecuación diferencial siendo la condiciones
iniciales nulas, en la forma habitual ó
yyxxx 37209....+=++
0)0(,0)0(,0)0(,0)0(,0)0(....
===== yyxxx
Apuntes de regulación Automática. Prácticas y Problemas.
-22-
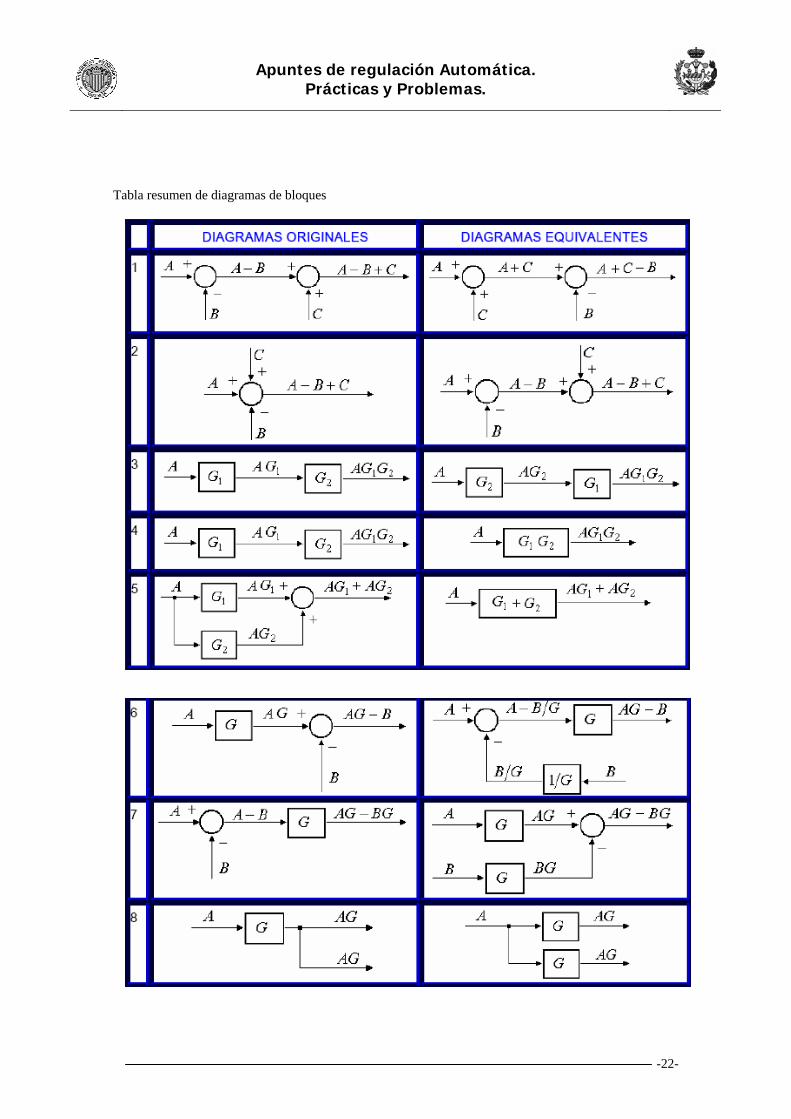
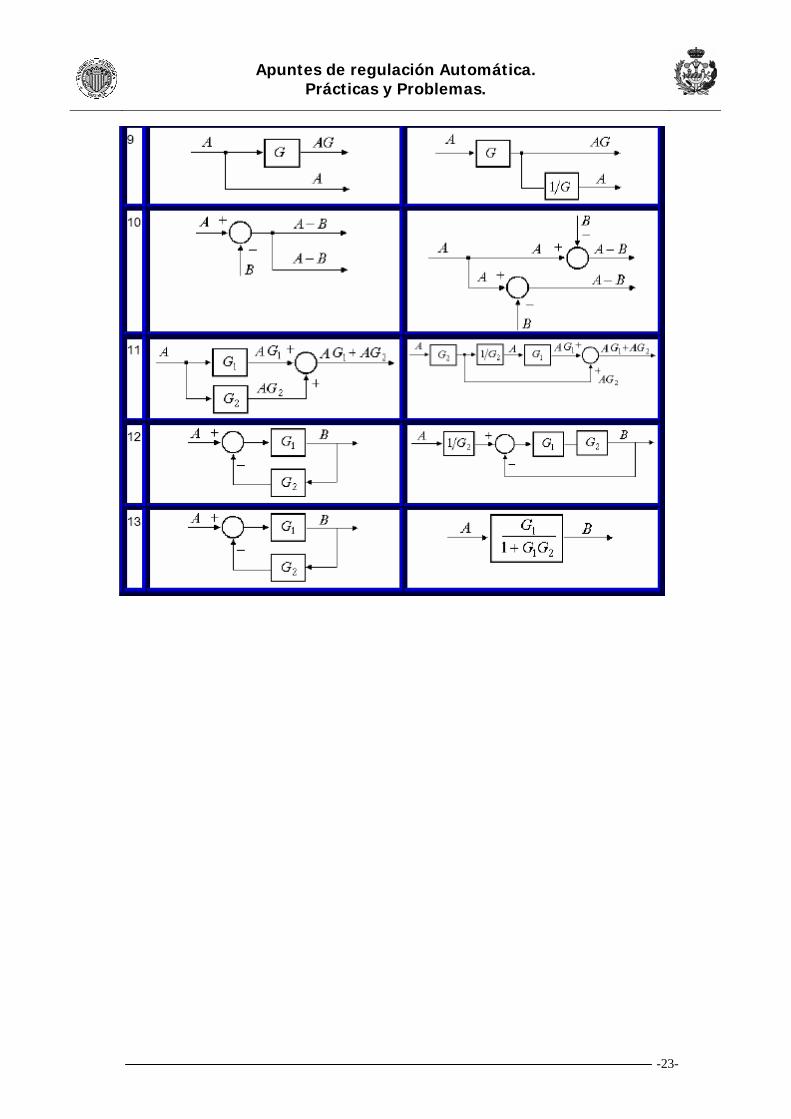
Tabla resumen de diagramas de bloques
Apuntes de regulación Automática. Prácticas y Problemas.
-23-