Unidad 3.1 respuesta en el tiempo de sistemas dinã¡micos (copia en conflicto de hã©ctor ivã¡n...
18
3.-ANALISIS DE SISTEMAS DINAMICOS 3.1.- INTRODUCCION 3.2.-SOLUCION DE ECUACIONES LINEALES INVARIANTES EN FUNCION DEL TIEMPO. 3.2.1.- FUNCION ESCALON UNITARIO, FUNCION IMPULSO UNITARIO, FUNCION RAMPA. 3.2.2.- RESPUESTA EN SISTEMAS DE PRIMER ORDEN. 3.2.3.- RESPUESTA EN SISTEMAS DE SEGUNDO ORDEN. 3.2.4.- RESPUESTA EN SISTEMAS DE ORDEN SUPERIOR. 3.3.- VARIABLES DE ESTADO. 3.3.1.- MATRIZ DE TRANSICIÓN DE ESTADOS. 3.3.2.- ECUACION DE TRANSICIÓN DE ESTADOS. 3.3.3.- RELACION ENTRE LAS ECUACIONES DE ESTADO Y LAS FUNCIONES DE TRANSFERENCIA. 3.3.4.- DESCOMPOSICIONES DE FUNCIONES DE TRANSFERENCIA. 3.3.5.- ECUACIÓN CARACTERISTICA, VALORES Y VECTORES CARACTERISTICOS. 3.3.6.- TRANSFORMACIONES DE SIMILITUD.
-
Upload
hector-alejandro-gonzalez-lazaro -
Category
Technology
-
view
38 -
download
3
Transcript of Unidad 3.1 respuesta en el tiempo de sistemas dinã¡micos (copia en conflicto de hã©ctor ivã¡n...

3.-ANALISIS DE SISTEMAS DINAMICOS
3.1.- INTRODUCCION
3.2.-SOLUCION DE ECUACIONES LINEALES INVARIANTES EN FUNCION DEL TIEMPO.3.2.1.- FUNCION ESCALON UNITARIO, FUNCION IMPULSO UNITARIO, FUNCION RAMPA.3.2.2.- RESPUESTA EN SISTEMAS DE PRIMER ORDEN.3.2.3.- RESPUESTA EN SISTEMAS DE SEGUNDO ORDEN.3.2.4.- RESPUESTA EN SISTEMAS DE ORDEN SUPERIOR.
3.3.- VARIABLES DE ESTADO.3.3.1.- MATRIZ DE TRANSICIÓN DE ESTADOS.3.3.2.- ECUACION DE TRANSICIÓN DE ESTADOS.3.3.3.- RELACION ENTRE LAS ECUACIONES DE ESTADO Y LAS FUNCIONES DE TRANSFERENCIA.3.3.4.- DESCOMPOSICIONES DE FUNCIONES DE TRANSFERENCIA.3.3.5.- ECUACIÓN CARACTERISTICA, VALORES Y VECTORES CARACTERISTICOS.3.3.6.- TRANSFORMACIONES DE SIMILITUD.

ANALISIS DE SISTEMAS DINAMICOS
Durante el estudio de un sistema dinámico resulta de gran importancia, siendo este el fin en si mismo, llegar a la etapa de solución o definición a cerca de la operatividad (funcionamiento en condiciones normales) del objeto de estudio. Por tanto, es necesario, dominar algunas técnicas de solución que permitan conocer el comportamiento o respuesta bajo la acción de varias entradas y con distintos valores de los parámetros del sistema.
Observemos primero que la respuesta de un sistema, esta sujeto a la intervención o no de una perturbación externa. Es decir, un sistema tendrá necesariamente dos tipos de respuestas; en primer término se considera que se presenta la respuesta natural, en ausencia de entradas externas y en segundo término tenemos la respuesta forzada del estado de equilibrio bajo influencia de perturbaciones.
Que decimos entonces, que la respuesta global o total de un sistema dinámico esta integrada por la suma de la respuesta natural y la forzada. Análogamente en matemáticas, decimos que la solución general de un modelo, es la suma de la solución homogénea y la solución particular; que satisfaga las condiciones iniciales.
x (t) = xc (t) + xp (t) Solución General

bJ
0
bJ
(0) = 0
Ec. 3.1Al resolver la ecuación (3.1), podemos suponer que:
(t) = 0 et Ec (3.2)
La diferenciación de ambos lados de la Ec (3.2) con respecto a t tenemos:
000 tt ebeJ Ahora sustituyendo en Ec 3.1 :
Puesto que 0et ≠ 0, la ecuación anterior se simplifica a:
J + b = 0
que se conoce como ecuación característica del sistema, y despejando :
= - b/J
sustituyendo este valor en la ecuación (3.2) finalmente se tiene:
(t) = 0 e-(b/J)t Ec. (3.6)
La velocidad angular decrece exponencialmente
Respuesta Libre

0
0.3680
0e-(b/j)t
0tT
Curva de velocidad angular del sistema rotor.
Cuando la respuesta es de decrecimiento exponencial, es conveniente referir la respuesta en términos de una constante de tiempo. Una constante de tiempo es aquel valor de tiempo que hace al exponente igual a -1. En este sistema, la constante de tiempo T es igual a J/b, y cuando t = T, el valor del factor exponencial es e-T/T = e-1 = 0.368Es decir, cuando el tiempo t en segundos es igual a la constante de tiempo, el factor exponencial se reduce aproximadamente a 37% de su valor inicial, como se muestra en la figura anterior.

Funciones especiales de entrada:
Escalón.-
Se define como escalón unitario cuando
Us (t) = 0 en t ≤ 0
Us (t) = 1 en t > 0
es decir, su magnitud vale cero para todo valor del tiempo excepto para t > 0. Observe que el escalón general de magnitud u0 se obtiene al multiplicar el escalón unitario por u0.
U (t)
t
u0
ts = 0
cero
u (t) = u0 Us (t)
U (t)
t
u0
0
cero
u (t) = u0 Us (t- ts)
ts

Ejemplos de sistemas físicos cuya salida se aproxima a una función escalón:
1.-Interruptor encendido/ apagado que físicamente esta conectado a una fuente de voltaje. La salida es cero en tanto que el interruptor permanezca abierto. La salida se convierte de manera instantánea en no cero y al cerrar el citado interruptor.
2.- Al sumergir un medidor de temperatura de mercurio en un medio cuya temperatura es X+x b; siendo x la variación de temperatura entre el ambiente y el medio.
3.- La apertura o cierre súbitos de una válvula es una entrada escalón aproximada.
4.- Aplicar el sistema de frenado a un elemento giratorio, en forma instantánea con una fuerza constante.
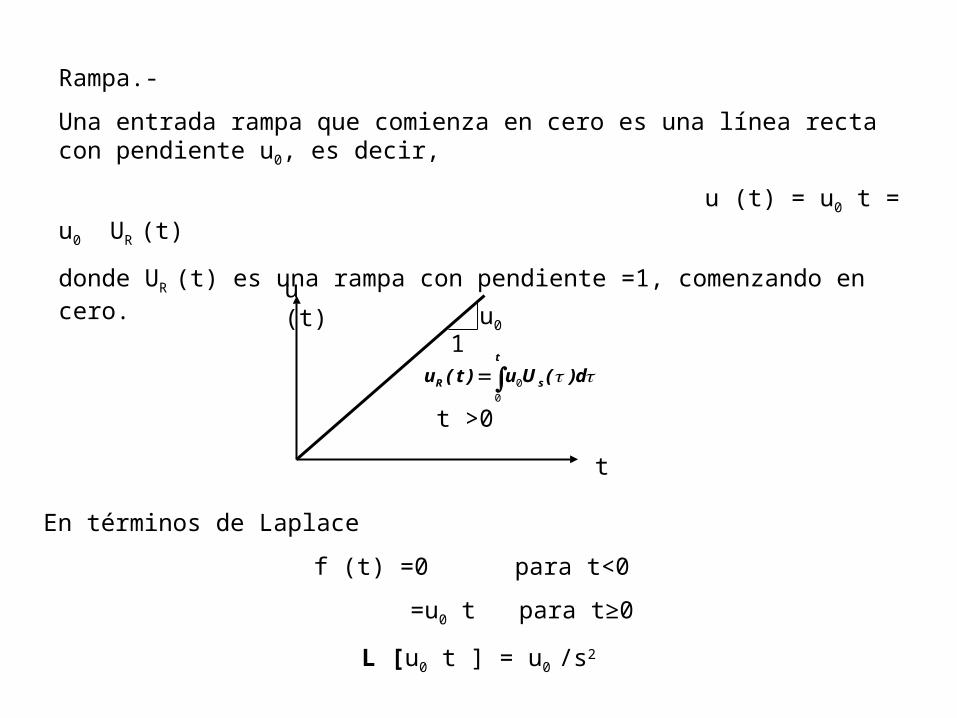
Rampa.-
Una entrada rampa que comienza en cero es una línea recta con pendiente u0, es decir,
u (t) = u0 t = u0 UR (t)
donde UR (t) es una rampa con pendiente =1, comenzando en cero.
t
u (t)
t
sR d)(Uu)t(u0
0
1u0
t >0
En términos de Laplace
f (t) =0 para t<0
=u0 t para t≥0
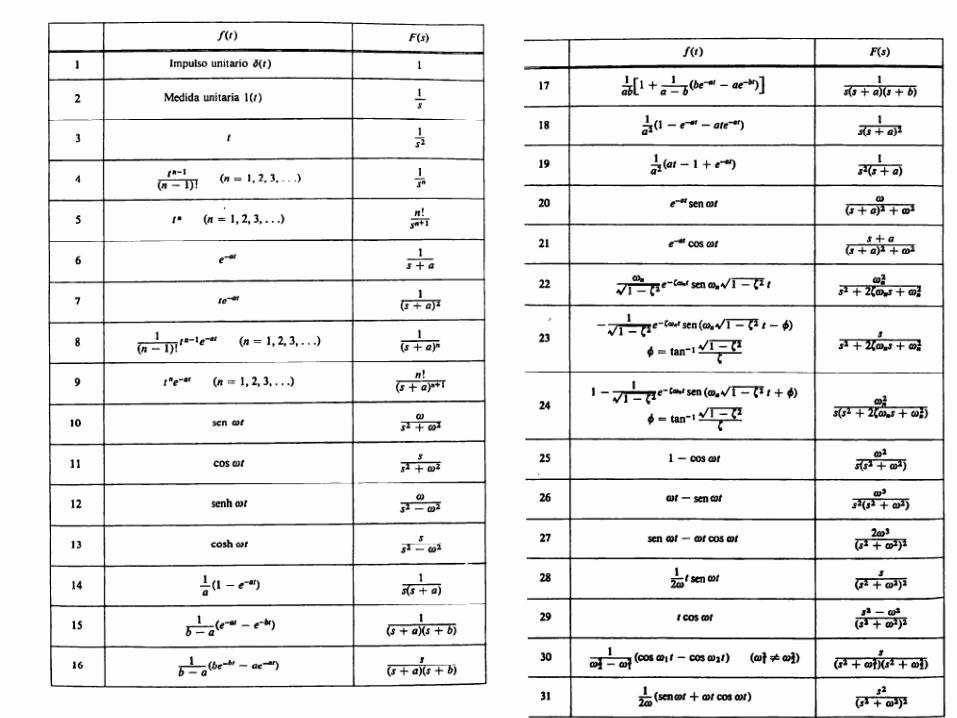
L [u0 t ] = u0 /s2

Función Impulso.
Esta es una versión de la función pulso, para visualizar esta función, consideremos un pulso degenerado.
Consideremos un pulso de amplitud Tp y magnitud u que ocurre en t=ts. El área bajo el pulso es A= uTp, una entrada impulso de fuerza (área) A que ocurre en t=ts ; resultará del límite cuando el ancho del pulso se vuelva arbitrariamente pequeño mientras el área permanece constante en A.
L [f (t) ] = A
La función impulso cuya área es la unidad se conoce como función impulso unitario o función Delta de Dirac, la cual ocurre cuando t=t0, se indica por,
(t-t0) =0 para t ≠ t0
(t-t0) =∞ para t = t0
10 dt)tt(

Ejemplo 3.1.-
Considere un modelo de rotor con velocidad constante y amortiguamiento viscoso al cual se la aplica un par de frenado.
J= 40.8 kg.m2
b= 0.408 N.m.s
0=50 rad /s
Una frenada completa es igual a un momento de frenado de 800 N.M.
Obtenga el comportamiento de la velocidad angular bajo las siguientes criterios:
a.- Se aplica de forma súbita ¼ del momento de frenado, se mantiene durante 8 segundos y luego se suelta.
b.- El freno se aplica de forma gradual, aumentando linealmente desde cero hasta el punto medio de un frenado completo durante un período de 8 segundos y luego se suelta.
SISTEMAS DINAMICOS DE PRIMER GRADO

c.- Se aplica un frenado completo durante sólo 2 segundos, y luego se suelta.
d.- El momento de frenado aumenta linealmente desde cero hasta la mitad de un frenado completo en 4 s, y luego se suelta de manera lineal hasta cero, durante otros 4 segundos.

Ejemplo 3.2.- Imagine un termómetro de mercurio que presenta una temperatura uniforme K (ambiente) y que en t=0 se le sumerge en un medio (agua) cuya temperatura se define como + b K, (b es la diferencia entre la temperatura del agua caliente y la del ambiente.)La temperatura instantánea del termómetro es + K, observemos que es el cambio de temperatura en el termómetro que satisface la condición (0)= 0.Deseamos encontrar la respuesta (t) cuando la temperatura del medio sea constante o b sea constante.Consideremos el siguiente modelo matemático:
bdtd
RC
Tomando la transformada de Laplace:
)()()0()( sssRCS b
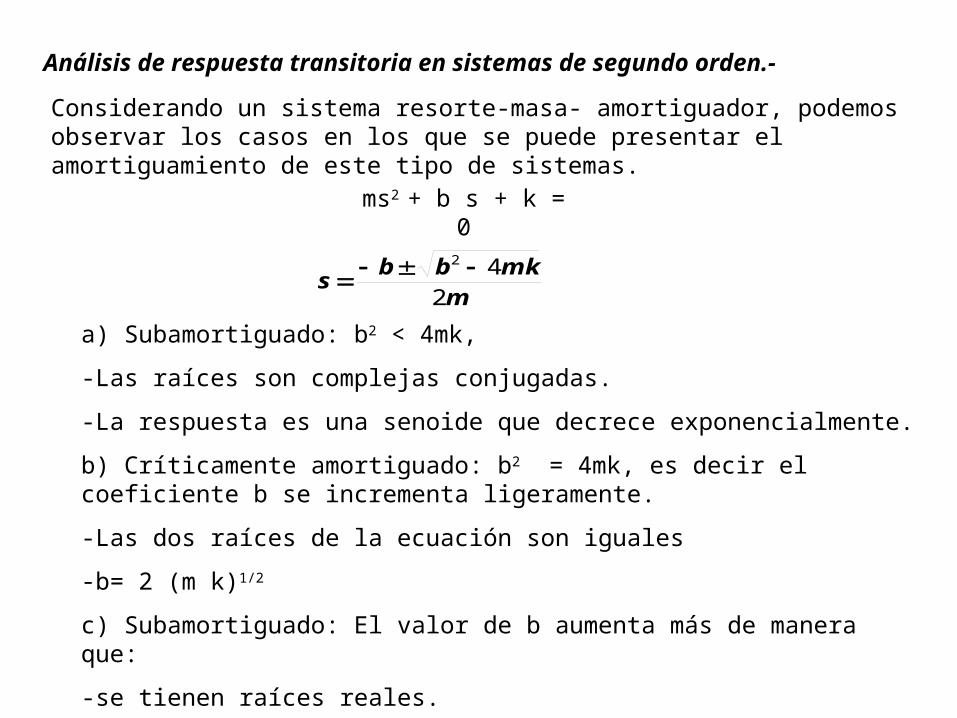
Análisis de respuesta transitoria en sistemas de segundo orden.-
Considerando un sistema resorte-masa- amortiguador, podemos observar los casos en los que se puede presentar el amortiguamiento de este tipo de sistemas.
ms2 + b s + k = 0
mmkbb
s2
42
a) Subamortiguado: b2 < 4mk,
-Las raíces son complejas conjugadas.
-La respuesta es una senoide que decrece exponencialmente.
b) Críticamente amortiguado: b2 = 4mk, es decir el coeficiente b se incrementa ligeramente.
-Las dos raíces de la ecuación son iguales
-b= 2 (m k)1/2
c) Subamortiguado: El valor de b aumenta más de manera que:
-se tienen raíces reales.

Para un sistema masa-resorte-amortiguador, determine la frecuencia observada en la vibración y la amplitud cuatro ciclos después de que la masa se desplaza 0.08m y se suelta sin velocidad inicial. Considere m= 10 kg, b= 20 Ns/m y K= 100 N/m
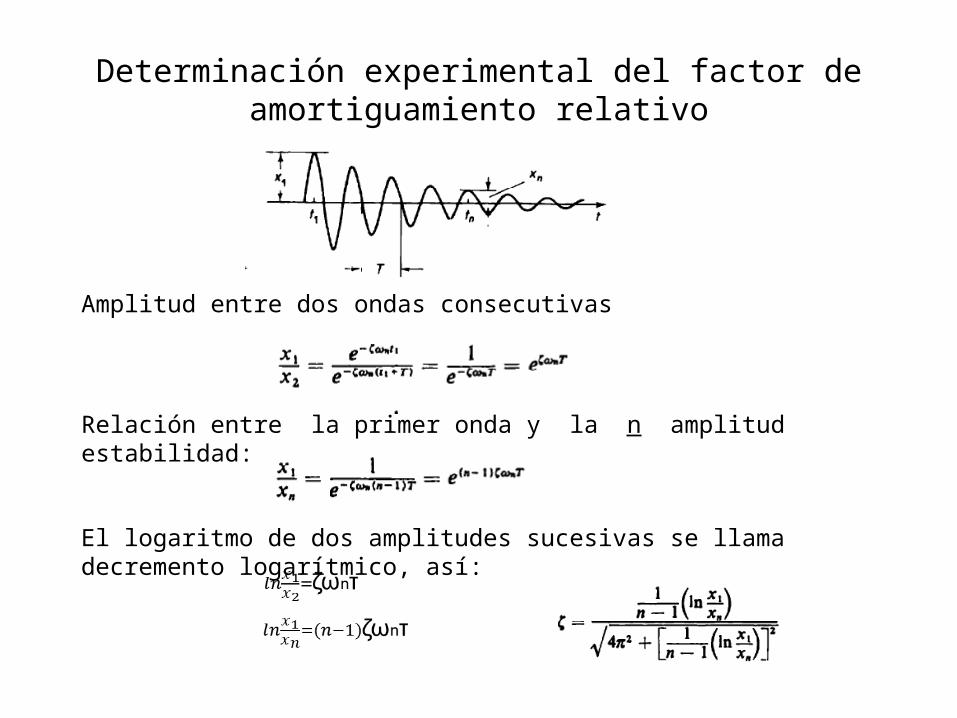
Determinación experimental del factor de amortiguamiento relativo
Amplitud entre dos ondas consecutivas
Relación entre la primer onda y la n amplitud estabilidad:
El logaritmo de dos amplitudes sucesivas se llama decremento logarítmico, así:

TIEMPO DE ASENTAMIENTO
Donde T es la constante de tiempo

EXAMEN
1).- La masa m de 1 kg está vibrando inicialmente en el sistema mecanico mostrado. En t=0 golpeamos la masa con una fuerza impulsiva p(t) cuya magnitud es de 10N. Suponiendo que la constante del resorte K es de 100 N/m y que x(0)= 0.1 m, ẋ(0)= 1 m/s, encuentre el desplazamiento como función del tiempo t. El desplazamiento x(t) se mide desde la posición de equilibrio en ausencia de la fuerza de excitación.
Una vibración libre del sistema mecánico indica que la amplitud de la vibración decrece a 25% de su valor en t=to después de cuatro ciclos consecutivos de movimiento. Determine el coeficiente de fricción viscosa b del sistema si m=1kg y K= 500n/m.

Una vibración libre del sistema mecánico indica que la amplitud de la vibración decrece a 25% de su valor en t=to después de cuatro ciclos consecutivos de movimiento. Determine el coeficiente de fricción viscosa b del sistema si m=1kg y K= 500n/m.