Unidad 6 metodos
16
Unidad 6 Solución de sistemas de ecuaciones no lineales Puesto que, como se acaba de señalar, los métodos que abordaremos serán de tipo iterativo y en ellos se generara una sucesión de vectores que, en el mejor de los casos, se vayan aproximando hacia un vector solución, conviene comenzar recordando algunos conceptos sobre sucesiones. En este sentido, en primer lugar, nos ubicaremos en conjuntos sobre los que se haya de finido una forma de medir la distancia entre sus elementos (esto es en un espacio métrico (E, d)). En este espacio métrico comenzamos recordando la siguiente de finición: Dada una sucesión infinita de elementos {xi}∞i=1del espacio métrico (E, d) se dice que la sucesión es convergente hacia el elemento x∗∈E, si para cualquier valor ε > 0 siempre se puede encontrar un numero natural N tal que para todo ´índice n > N se verifica que d(xn, x∗) < ε. Al elemento x∗ anterior se le denomina, si existe, límite de la sucesión {xi}∞i=1 Dada una sucesión infinita de elementos {xi}∞i=1 del espacio métrico (E, d) se dice que la sucesión es una sucesión de Cauchy, si para cualquier valor ε > 0 siempre se puede encontrar un número natural N tal que para todo par de ´índices n > N y m > N se verifica que d(xn, xm) < ε.
-
Upload
oscar-martinez -
Category
Documents
-
view
866 -
download
4
Transcript of Unidad 6 metodos

Unidad 6
Solución de sistemas de ecuaciones no lineales
Puesto que, como se acaba de señalar, los métodos que abordaremos serán de tipo iterativo
y en ellos se generara una sucesión de vectores que, en el mejor de los casos, se vayan
aproximando hacia un vector solución, conviene comenzar recordando algunos conceptos
sobre sucesiones. En este sentido, en primer lugar, nos ubicaremos en conjuntos sobre los
que se haya de finido una forma de medir la distancia entre sus elementos (esto es en un
espacio métrico (E, d)). En este espacio métrico comenzamos recordando la siguiente de
finición:
Dada una sucesión infinita de elementos {xi}∞i=1del espacio métrico (E, d) se dice que la
sucesión es convergente hacia el elemento x∗∈E, si para cualquier valor ε > 0 siempre se
puede encontrar un numero natural N tal que para todo ´índice n > N se verifica que d(xn,
x∗) < ε. Al elemento x∗ anterior se le denomina, si existe, límite de la sucesión {xi}∞i=1
Dada una sucesión infinita de elementos {xi}∞i=1 del espacio métrico (E, d) se dice que la
sucesión es una sucesión de Cauchy, si para cualquier valor ε > 0 siempre se puede
encontrar un número natural N tal que para todo par de ´índices n > N y m > N se verifica
que d(xn, xm) < ε.

Método de Jacobi
En análisis numérico el método de Jacobi es un método iterativo, usado para resolver
sistemas de ecuaciones lineales del tipo . El algoritmo toma su nombre del
matemático alemán Carl Gustav Jakob Jacobi. El método de Jacobi consiste en usar
fórmulas como iteración de punto fijo.
La sucesión se construye descomponiendo la matriz del sistema en la forma siguiente:
donde
, es una matriz diagonal.
, es una matriz triangular inferior.
, es una matriz triangular superior.
Partiendo de , podemos reescribir dicha ecuación como:
Luego,
Si aii ≠ 0 para cada i. Por la regla iterativa, la definición del Método de Jacobi puede ser
expresado de la forma:
donde es el contador de iteración, Finalmente tenemos:
Cabe destacar que al calcular xi(k+1)
se necesitan todos los elementos en x(k)
, excepto el que
tenga el mismo i. Por eso, al contrario que en el método Gauss-Seidel, no se puede
sobreescribir xi(k)
con xi(k+1)
, ya que su valor será necesario para el resto de los cálculos. Esta
es la diferencia más significativa entre los métodos de Jacobi y Gauss-Seidel. La cantidad
mínima de almacenamiento es de dos vectores de dimensión n, y será necesario realizar un
copiado explícito

Convergencia
es la condición necesaria y suficiente para la convergencia, siendo R = L + U. No es
necesario que los elementos de la diagonal en la matriz sean mayores (en magnitud) que los
otros elementos (la matriz es diagonalmente dominante), pero en el caso de serlo, la matriz
converge
Algoritmo
El método de Jacobi se puede escribir en forma de algoritmo de la siguiente manera:
Algoritmo Método de Jacobi
función Jacobi ( , )
// es una aproximación inicial a la solución//
para hasta convergencia hacer
para hasta hacer
para hasta hacer
si entonces
fin para
fin para comprobar si se alcanza convergencia
fin para

Ejemplo
Un sistema linear de la forma con una estimación inicial esta dado por
Usamos la ecuación , descrita anteriormente, para estimar
. Primero, reescribimos la ecuación de una manera mas conveniente
, donde y . vea que
donde y son las partes inferior y superior de . de los valores
conocidos.
determinamos como
C es encontrada como
con T y C calculadas, estimaremos como :
siguientes iteraciones.

este proceso se repetirá hasta que converja (i.e., hasta que es menor). la
solución después de 25 iteraciones es:
Método de Gauss-Seidel
En análisis numérico el método de Gauss-Seidel es un método iterativo utilizado para
resolver sistemas de ecuaciones lineales. El método se llama así en honor a los matemáticos
alemanes Carl Friedrich Gauss y Philipp Ludwig von Seidel y es similar al método de
Jacobi.
Aunque este método puede aplicarse a cualquier sistema de ecuaciones lineales que
produzca una matriz (cuadrada, naturalmente pues para que exista solución única, el
sistema debe tener tantas ecuaciones como incógnitas) de coeficientes con los elementos de
su diagonal no-nulos, la convergencia del método solo se garantiza si la matriz es
diagonalmente dominante o si es simétrica y, a la vez, definida positiva.
Descripción
Es un método iterativo, lo que significa que se parte de una aproximación inicial y se repite
el proceso hasta llegar a una solución con un margen de error tan pequeño como se quiera.
Buscamos la solución a un sistema de ecuaciones lineales, en notación matricial:
donde:

}El método de iteración Gauss-Seidel se computa, para la iteración :
donde
definimos
y
,
donde los coeficientes de la matriz N se definen como si , si
.
Considerando el sistema con la condición de que .
Entonces podemos escribir la fórmula de iteración del método
(*)
La diferencia entre este método y el de Jacobi es que, en este último, las mejoras a las
aproximaciones no se utilizan hasta completar las iteraciones
Convergencia
Teorema: Suponga una matriz es una matriz no singular que cumple la condición de
ó . Entonces el método de Gauss-Seidel converge a una solución del sistema de
ecuaciones, y la convergencia es por lo menos tan rápida como la convergencia del
método de Jacobi.
Para ver los casos en que converge el método primero mostraremos que se puede escribir
de la siguiente forma:

(**)
(el término es la aproximación obtenida después de la k-ésima iteración) este modo de
escribir la iteración es la forma general de un método iterativo estacionario.
Primeramente debemos demostrar que el problema lineal que queremos resolver
se puede representar en la forma (**), por este motivo debemos tratar de escribir la matriz
A como la suma de una matriz triangular inferior, una diagonal y una triangular superior
A=(L+D+U), D=diag( ). Haciendo los despejes necesarios escribimos el método de esta
forma
por lo tanto M=-(L+D)-1
U y c=(L+D)-1
b
Ahora podemos ver que la relación entre los errores, el cuál se puede calcular al substraer
x=Bx+c de (**)
Supongamos ahora que , i= 1, ..., n, son los valores propios que corresponden a los
vectores propios , i= 1,..., n, los cuales son linealmente independientes, entonces
podemos escribir el error inicial
(***)
Por lo tanto la iteración converge si y sólo si | λi|<1, i= 1, ..., n. De este hecho se desprende
el siguiente teorema:
Teorema: Una condición suficiente y necesaria para que un método iterativo
estacionario converja para una aproximación arbitraria x^{(0)} es que
donde ρ(M) es el radio espectral de M.

Explicación
Se elige una aproximación inicial para .
Se calculan las matrices M y el vector c con las fórmulas mencionadas. El proceso se repite
hasta que sea lo suficientemente cercano a , donde k representa el número de
pasos en la iteración.Se tiene que despejar de la ecuacion una de variable distinta y
determinante.Si al sumar los coeficientes de las variables divididos entre si da 1 y -1 es más
probable que el despeje funcione. Y se debe de despejar en cada ecuacion una variable
distinta, una forma de encontrar que variable despejar es despejando la variable que tenga
el mayor coeficiente.
Ejemplos:
3x-y+z=1
x-5y+z=8
x-y+4z=11
Despejes:
x=(1+y-z)/3 y=(8-x-z)/-5 z=(11-x+y)/4
Despues se necesita iniciar con las iteraciones,el valor inicial no es importante lo
importante es usar las iteraciones necesarias, para darte cuenta cuantas iteraciones son
necesarias necesitas observar cuando los decimales se estabilicen en dos decimales pero se
tiene que tener en cuenta que se tiene que seguir con las iteraciones aunque una de las
variables sea estable si las démas no han llegado al valor buscado. Se sustituye los valores
en los despejes, usando para cada despeje el nuevo valor encontrado.
k x Y z
0 0 0 0
1 0.333 -1.600 2.750
2 -1.117 -0.983 2.267
3 -0.750 -1.370 2.783
4 -1.051 -1.193 2.595
... ... ... ...
10 -0.982 -1.259 2.679
11 -0.979 -1.261 2.681
12 -0.980 -1.260 2.680
13 -0.980 -1.260 2.680
-0.980 -1.260 2.680

Método de Newton
En análisis numérico, el método de Newton (conocido también como el método de
Newton-Raphson o el método de Newton-Fourier) es un algoritmo eficiente para
encontrar aproximaciones de los ceros o raíces de una función real. También puede ser
usado para encontrar el máximo o mínimo de una función, encontrando los ceros de su
primera derivada.
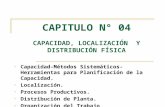
Descripción del método
El método de Newton-Raphson es un método abierto,
en el sentido de que su convergencia global no está
garantizada. La única manera de alcanzar la
convergencia es seleccionar un valor inicial lo
suficientemente cercano a la raíz buscada. Así, se ha
de comenzar la iteración con un valor razonablemente
cercano al cero (denominado punto de arranque o
valor supuesto). La relativa cercanía del punto inicial a
la raíz depende mucho de la naturaleza de la propia
función; si ésta presenta múltiples puntos de inflexión
o pendientes grandes en el entorno de la raíz, entonces
las probabilidades de que el algoritmo diverja
aumentan, lo cual exige seleccionar un valor supuesto
cercano a la raíz. Una vez que se ha hecho esto, el método linealiza la función por la recta
tangente en ese valor supuesto. La abscisa en el origen de dicha recta será, según el método,
una mejor aproximación de la raíz que el valor anterior. Se realizarán sucesivas iteraciones
hasta que el método haya convergido lo suficiente. f'(x)= 0 Sea f : [a, b] -> R función
derivable definida en el intervalo real [a, b]. Empezamos con un valor inicial x0 y definimos
para cada número natural n
Donde f ' denota la derivada de f.
Nótese que el método descrito es de aplicación exclusiva para funciones de una sola
variable con forma analítica o implícita conocible. Existen variantes del método aplicables
a sistemas discretos que permiten estimar las raíces de la tendencia, así como algoritmos
que extienden el método de Newton a sistemas multivariables, sistemas de ecuaciones, etc.

Obtención del Algoritmo
Tres son las formas principales por las que tradicionalmente se ha obtenido el algoritmo de
Newton-Raphson.
La primera de ellas es una simple interpretación geométrica. En efecto, atendiendo al
desarrollo geométrico del método de la secante, podría pensarse en que si los puntos de
iteración están lo suficientemente cerca (a una distancia infinitesimal), entonces la secante
se sustituye por la tangente a la curva en el punto. Así pues, si por un punto de iteración
trazamos la tangente a la curva, por extensión con el método de la secante, el nuevo punto
de iteración se tomará como la abscisa en el origen de la tangente (punto de corte de la
tangente con el eje X). Esto es equivalente a linealizar la función, es decir, f se reemplaza
por una recta tal que contiene al punto ( , ( )) y cuya pendiente coincide con la
derivada de la función en el punto, . La nueva aproximación a la raíz, , se logra
la intersección de la función lineal con el eje X de abscisas. Matemáticamente:
En la ilustración adjunta del método de Newton se puede ver que es una mejor
aproximación que para el cero (x) de la función f.
Una forma alternativa de obtener el algoritmo es desarrollando la función f (x) en serie de
Taylor, para un entorno del punto :
Si se trunca el desarrollo a partir del término de grado 2, y evaluamos en :
Si además se acepta que tiende a la raíz, se ha de cumplir que , luego,
sustituyendo en la expresión anterior, obtenemos el algoritmo.
Finalmente, hay que indicar que el método de Newton-Raphson puede interpretarse como
un método de iteración de punto fijo. Así, dada la ecuación , se puede
considerar el siguiente método de iteración de punto fijo:

Se escoge h (x) de manera que g'(r)=0 (r es la raíz buscada). Dado que g'(r) es:
Entonces:
Como h (x) no tiene que ser única, se escoge de la forma más sencilla:
Por tanto, imponiendo subíndices:
Expresión que coincide con la del algoritmo de Newton-Raphson
Convergencia del Método
El orden de convergencia de este método es, por lo menos, cuadrático. Sin embargo, si la
raíz buscada es de multiplicidad algebraica mayor a uno (i.e, una raíz doble, triple, ...), el
método de Newton-Raphson pierde su convergencia cuadrática y pasa a ser lineal de
constante asintótica de convergencia 1-1/m, con m la multiplicidad de la raíz.
Existen numerosas formas de evitar este problema, como pudieran ser los métodos de
aceleración de la convergencia tipo Δ² de Aitken o el método de Steffensen. Derivados de
Newton-Raphson destacan el método de Ralston-Rabinowitz, que restaura la convergencia
cuadrática sin más que modificar el algoritmo a:
Evidentemente, este método exige conocer de antemano la multiplicidad de la raíz, lo cual
no siempre es posible. Por ello también se puede modificar el algoritmo tomando una
función auxiliar g(x) = f(x)/f'(x), resultando:

Su principal desventaja en este caso sería lo costoso que pudiera ser hallar g(x) y g'(x) si
f(x) no es fácilmente derivable.
Por otro lado, la convergencia del método se demuestra cuadrática para el caso más
habitual en base a tratar el método como uno de punto fijo: si g '(r)=0, y g''(r) es distinto de
0, entonces la convergencia es cuadrática. Sin embargo, está sujeto a las particularidades de
estos métodos.
Nótese de todas formas que el método de Newton-Raphson es un método abierto: la
convergencia no está garantizada por un teorema de convergencia global como podría
estarlo en los métodos de falsa posición o de bisección. Así, es necesario partir de una
aproximación inicial próxima a la raíz buscada para que el método converja y cumpla el
teorema de convergencia local.
Teorema de Convergencia Local del Método de Newton
Sea . Si , y , entonces existe un r>0 tal
que si , entonces la sucesión xn con verifica que:
para todo n y xn tiende a p cuando n tiende a infinito.
Si además , entonces la convergencia es cuadrática.
Teorema de Convergencia Global del Método de Newton
Sea verificando1 :
1.
2. para todo
3. para todo
4.
Entonces existe un único tal que por lo que la sucesión converge a s.

Estimación del Error
Se puede demostrar que el método de Newton-Raphson tiene convergencia cuadrática: si
es raíz, entonces:
para una cierta constante . Esto significa que si en algún momento el error es menor o
igual a 0,1, a cada nueva iteración doblamos (aproximadamente) el número de decimales
exactos. En la práctica puede servir para hacer una estimación aproximada del error:
Error relativo entre dos aproximaciones sucesivas:
Con lo cual se toma el error relativo como si la última aproximación fuera el valor exacto.
Se detiene el proceso iterativo cuando este error relativo es aproximadamente menor que
una cantidad fijada previamente.
Ejemplo
Consideremos el problema de encontrar un número positivo x tal que cos(x) = x3.
Podríamos tratar de encontrar el cero de f(x) = cos(x) - x3.
Sabemos que f '(x) = -sin(x) - 3x2. Ya que cos(x) ≤ 1 para todo x y x
3 > 1 para x>1,
deducimos que nuestro cero está entre 0 y 1. Comenzaremos probando con el valor inicial
x0 = 0,5
Los dígitos correctos están subrayados. En particular, x6 es correcto para el número de
decimales pedidos. Podemos ver que el número de dígitos correctos después de la coma se
incrementa desde 2 (para x3) a 5 y 10, ilustando la convergencia cuadrática.

Aplicación de las matrices y los determinantes a los
sistemas de ecuaciones lineales
Un sistema de ecuaciones lineales (s.e.l.) es un conjunto de m ecuaciones con n incógnitas
de la forma:
donde aij son los coeficientes, xi las incógnitas y bi son los términos independientes.
Representación matricial de un s.e.l.
El anterior sistema se puede expresar en forma matricial, usando el producto de matrices de
la forma:
De modo simplificado suele escribirse Am,n · Xn,1 = Bm,1 , donde la matriz A de orden m x n
se denomina matriz de coeficientes.
También usaremos la matriz ampliada, que representaremos por A', que es la matriz de
coeficientes a la cual le hemos añadido la columna del término independiente:

Discusión de un s.e.l.: Teorema de Rouché-Fröbenius
Dado un sistema de ecuaciones con matriz de coeficientes A, matriz ampliada A' y rangos
respectivos r y r' se verifican:
1. El sistema de ecuaciones es compatible cuando rango(A) = rango(A')
2. En caso de compatibilidad existen dos posibilidades:
Si r = r' = n (nº de incógnitas) Sistema compatible determinado (una única solución)
Si r = r' < n (nº de incógnitas) Sistema compatible indeterminado (infinitas soluciones)
Al valor n - r se le llama grado de libertad del sistema.
Resolución de un s.e.l.
a) Regla de Cramer
Es aplicable si el sistema tiene igual número de ecuaciones que de incógnitas (n=m) y es
compatible determinado (a un s.e.l. qu cumple estas condiciones se le llama un sistema de
Cramer).
El valor de cada incógnita xi se obtiene de un cociente cuyo denominador es el determinate
de la matriz de coeficientes, y cuyo numerador es el determinante que se obtiene al cambiar
la columna i del determinante anterior por la columna de los términos independientes.

INTITUTO TECNOLOGICO SUPERIOR DE
MACUSPANA
MATERIA: METODOS MUNERICOS
UNIDAD V
MAESTRO: ABRAHAM LINCOLN MARTINE
RUIZ
ALUMNO: OSCAR DE JESUS LOPEZ
MARTINEZ
CARRERA: ING. CIVIL