CÁLCULO DIFERENCIAL E INTEGRAL EN VARIAS VARIABLES …
33
CÁLCULO DIFERENCIAL E INTEGRAL EN VARIAS VARIABLES TEMA 5 ECUACIONES DIFERENCIALES Cuando escuchamos la palabra “ecuación”, usualmente pensamos en una expresión que involucra una incógnita x y potencias de x, que a su vez está igualada a cero. Normal- mente el primer ejemplo que se nos viene a la mente es una combinación lineal de térmi- nos de la forma x k , con escalares en R. Un ejemplo común es la ecuación cuadrática ax 2 + bx + c =0, la cual sabemos cómo resolver mediante cierta fórmula (como también ocurre con otros tipos particulares de ecuaciones). Sin embargo, expresiones más complicadas, donde por ejemplo x puede aparecer como argumento de otras funciones, como las trigonométricas, exponenciales y logarítmicas, también son consideradas como ecuaciones. En resumidas cuentas, una ecuación es una relación de la forma f (x)=0 donde f es una función, y para la cual debemos hallar o “despejar” los valores de x que cumplan esta relación. Ahora, con la expresión “ecuación diferencial” puede que aún no estemos familiarizados, aunque la idea es muy parecida a la de ecuación con incógnitas numéricas. Hablando en términos muy generales, una ecuación diferencial es una expresión matemática donde la incógnita a encontrar es una función en lugar de un número. En esta expresión pueden aparecer combinaciones de f , potencias de f , f como argumento de funciones dadas, y lo más importante, derivadas de f . Lo último se debe a que las ecuaciones diferenciales aparecen en el estudio de problemas donde se desea determinar el comportamiento de un fenómeno (modelado por una función f ) conociendo su variación (derivada). Si bien las ecuaciones diferenciales son un tema nuevo en nuestros estudios de cálculo, ya nos hemos topado con ejemplos particulares de éstas en lo que va del curso de CDIVV y en el curso anterior de CDI1V. Ciertamente, cuando nos daban una función g(x) y nos 1
Transcript of CÁLCULO DIFERENCIAL E INTEGRAL EN VARIAS VARIABLES …

CÁLCULO DIFERENCIAL E INTEGRAL
EN VARIAS VARIABLES TEMA 5
ECUACIONES DIFERENCIALES
Cuando escuchamos la palabra “ecuación”, usualmente pensamos en una expresión queinvolucra una incógnita x y potencias de x, que a su vez está igualada a cero. Normal-mente el primer ejemplo que se nos viene a la mente es una combinación lineal de térmi-nos de la forma xk, con escalares en R. Un ejemplo común es la ecuación cuadrática
ax2 + bx+ c = 0,
la cual sabemos cómo resolver mediante cierta fórmula (como también ocurre con otrostipos particulares de ecuaciones). Sin embargo, expresiones más complicadas, donde porejemplo x puede aparecer como argumento de otras funciones, como las trigonométricas,exponenciales y logarítmicas, también son consideradas como ecuaciones. En resumidascuentas, una ecuación es una relación de la forma f(x) = 0 donde f es una función, y parala cual debemos hallar o “despejar” los valores de x que cumplan esta relación.
Ahora, con la expresión “ecuación diferencial” puede que aún no estemos familiarizados,aunque la idea es muy parecida a la de ecuación con incógnitas numéricas. Hablando entérminos muy generales, una ecuación diferencial es una expresión matemática donde laincógnita a encontrar es una función en lugar de un número. En esta expresión puedenaparecer combinaciones de f , potencias de f , f como argumento de funciones dadas, ylo más importante, derivadas de f . Lo último se debe a que las ecuaciones diferencialesaparecen en el estudio de problemas donde se desea determinar el comportamiento de unfenómeno (modelado por una función f ) conociendo su variación (derivada).
Si bien las ecuaciones diferenciales son un tema nuevo en nuestros estudios de cálculo,ya nos hemos topado con ejemplos particulares de éstas en lo que va del curso de CDIVVy en el curso anterior de CDI1V. Ciertamente, cuando nos daban una función g(x) y nos
1

pedían hallar su familia de primitivas, llamémoslas f(x), lo que hacíamos era resolver unaecuación diferencial de la forma
f ′(x) = g(x),
mediante los métodos de integración vistos. El Teorema Fundamental del Cálculo, porotro lado, nos decía que bajo ciertas condiciones que debe cumplir g, siempre era posibleencontrar la familia de soluciones de la ecuación anterior, sobre el intervalo I dado por eldominio de g. Tal familia eran funciones de la forma
f(x) =
∫ x
a
g(t)dt+ C,
donde a es un punto en el interior de I y C es una constante real. Acá podemos notarcierto paralelismo entre las ecuaciones diferenciales y las ecuaciones numéricas. A saber,dependiendo de qué forma tengan, podemos aplicar determinado método para resolver-las. Por ejemplo, para la ecuación ax2 + bx + c = 0 aplicamos la resolvente de grado 2,mientras que para f ′(x) = g(x) aplicamos los métodos de integración.
Así como pasa con las ecuaciones numéricas, no existe un método o algoritmo generalque nos permita resolver todas las ecuaciones diferenciales. Esto último es uno de losproblemas de estudio de la disciplina homónima en matemáticas, muy activa hoy en día.En estas notas nos centraremos en algunos tipos particulares de ecuaciones diferencialesy mostraremos los métodos para resolverlas. Entre ellas, estudiaremos las ecuacionesdiferenciales de primer orden homogéneas y no homogéneas, de segundo orden con coeficientesconstantes homogéneas y no homogéneas, y de variables separables. También veremos ejemplosprácticos de estos tipos de ecuaciones diferenciales.
Todas las ecuaciones diferenciales estudiadas a continuación corresponden a una familiamás grande llamada ecuaciones diferenciales ordinarias, que son aquéllas donde la funciónincógnita f depende de una sola variable (usualmente denotada por t o x). Las ecuacionesdiferenciales que involucran funciones de dos o más variables se denominan ecuaciones enderivadas parciales, y son objeto de estudio de cursos más avanzados, como por ejemplo elcurso de Introducción a las Ecuaciones Diferenciales para algunas carreras en Facultad deIngeniería de la Universidad de la República.
5.1 Ecuaciones diferenciales lineales de primer orden
Antes de comenzar con el primer tipo de ecuaciones diferenciales, es importante que fi-jemos la notación que vamos a utilizar. Usualmente, a la función incógnita f(x) en unaecuación diferencial suele denotarse por y, es decir, y = f(x). Normalmente la variablex respecto a la cual derivamos está sobreentendida, y la notación anterior representa unasimplificación a la hora de escribir ecuaciones diferenciales.
2

Definición 5.1.1. Una ecuación diferencial de primer orden es una expresión de la forma
y′ = h(x, y), (i)
donde y = y(x) es una función que depende de x, y h(x, y) es una expresión que involucra a x o ay (o a ambas). A la función y que satisface la relación (i) se le conoce como solución de la ecuacióndiferencial.
Empecemos analizando el par de ecuaciones diferenciales de primer orden que son lasmás sencillas, es decir, donde h(x, y) depende únicamente de x o únicamente de y.
Ecuaciones de la forma y′ = h(x)
Encontrar las soluciones de la ecuación diferencial y′ = h(x) es simplemente hallar la fa-milia de primitivas de la función h(x). En este caso particular, sabemos que toda soluciónviene dada por
y =
∫h+ C.
Acá,C es una constante real, a la que se le conoce como constante de integración. La intregral∫h puede ser posible de calcular o no por los métodos de integración. En el primer caso,
tenemos que y es alguna función elemental. En el otro caso, y está dada según el TeoremaFundamental del Cálculo, es decir, si h es una función continua en un intervalo abierto I ,y a es un punto cualquiera de I , tenemos que
y(x) =
∫ x
a
h(t)dt+ C,
donde C = y(a).
Ejemplo 5.1.2. Sea P una partícula que describe un movimiento rectiíneo. Se desea conocer laposición s(t) de la partícula respecto al punto de partida, en cada instante de tiempo t, sabiendoque su velocidad s′(t) en t viene dada por 2cos(t).
El planteamiento se puede llevar a la ecuación diferencial
s′ = 2cos(t).
Luego, toda solución s tiene la forma
s(t) = 2sen(t) + C.
Si conocemos además el punto donde se encuentra la partícula al inicio t = 0, entonces podemosconocer el valor de C y tener una descripción completa del desplazamiento. Por ejemplo, si en
3

t = 0 pa partícula P se encuentra en el origen del sistema de coordenadas del observador, entoncess(0) = 0, y así
0 = s(0) = 2sen(0) + C = C.
Por lo tanto, para si la partícula P parte del origen y lleva velocidad instantánea s′(t) = 2cos(t),tenemos que su desplazamiento viene dado por
s(t) = 2sen(t).
La hipótesis s(0) = 0 del problema s′ = 2cos(t) en el ejemplo anterior, es lo que se conocecomo condición inicial. En general, dada una ecuación diferencial de primer orden y′ =h(x, y) para la cual se sabe que y(a) = b, donde a es un punto del intervalo dominio I dela función y, entonces al par {
y′ = h(x, y),y(a) = b.
se le denomina problema con condiciones iniciales. Estas definiciones serán análogaspara los demás tipos de ecuaciones diferenciales que vamos a estudiar.
Ecuaciones de la forma y′ = y
Consideremos ahora la ecuación diferencial y′ = y. En este caso debemos hallar una fun-ción que sea igual a su derivada. Sabemos que un ejemplo de esto es la función exponen-cial y(x) = ex. Pero además, es fácil ver que toda función de la forma y(x) = Cex tambiénes solución. Se puede demostrar, además, que toda solución de y′ = y debe tener la formaanterior. Este será el primer resultado que probaremos sobre ecuaciones diferenciales, yalgunos argumentos nos servirán más adelante.
Proposición 5.1.3. El problema de condición inicial
y′ = y, (ii)y(0) = C ∈ R, (iii)
tiene solución y es única, definida sobre todo R, la cual viene dada por
y(x) = Cex.
Demostración: Verifiquemos primero que y(x) = Cex es una solución de la ecuación y′ =y. En efecto, tenemos
y′ = (Cex)′ = C(ex)′ = Cex = y.
Ahora, veamos que y = Cex es la única solución de y′ = y. Supongamos que g(x) es otrasolución con g(0) = C. Luego, Cex = g′(x), o equivalentemente, C = e−xg′(x). A partir de
4

la igualdad anterior podemos deducir lo siguiente:
C = e−xg′(x) = [e−xg′(x)− e−xg(x)] + e−xg(x)
= (e−xg(x))′ + e−xg(x)
= (e−xg(x))′ + e−xg′(x) (ya que g(x) = g′(x))= (e−xg(x))′ + C (ya que C = e−xg′(x))
0 = (e−xg(x))′
Tenemos por ende que la función e−xg(x) tiene derivada cero sobre todo R. Por unresultado visto en CDI1V, sabemos que e−xg(x) es una constante, llamémosla K. Así,g(x) = Ke−x. Como g(0) = C, tenemos además que
C = g(0) = Ke−0 = K.
Por lo tanto, g(x) = Ce−x, lo cual demuestra la unicidad de la solución.
El resultado anterior, como el resto de los resultados que veremos sobre ecuaciones difer-enciales, es lo que se llama un problema de existencia y unicidad. Es decir, dada una ecuacióndiferencial para la cual se quieren estudiar sus soluciones, lo primero que se debe haceres hallar y verificar una solución, y probar que ésta es la única que resuelve la ecuacióndiferencial.
Ecuaciones diferenciales lineales de primer orden homogéneas
Habiendo calentado un poco con los casos anteriores, a partir de ahora y por el resto deesta sección nos enfocaremos en resolver un caso más general donde la expresión h(x, y)viene dada por h(x, y) = −P (x)y + Q(x), es decir, donde nuestra ecuación diferencial deprimer orden es lineal:
y′ + P (x)y = Q(x).
Este mismo caso los separaremos en dos partes según la siguiente definición.
Definición 5.1.4. A una ecuación diferencial lineal de primer orden y′ + P (x)y = Q(x), dondeP (x) y Q(x) son funciones continuas en un intervalo I , se le llama homogénea si Q(x) = 0 paratodo x ∈ I . En caso contrario, diremos que y′ + P (x)y = Q(x) es no homogénea.
El intervalo I mencionado en la definición anterior viene determinado por el dominiode P (x) (y también de Q(x) para el caso no homogéneo) y por el problema que se estéestudiando. Por ejemplo, si y describe el desplazamiento de una partícula a lo largo deltiempo, su intervalo de definición claramente no tendrá números reales negativos.
5

Analizamos en esta sección el caso homogéneo. Queremos entonces saber si la ecuacióndiferencial
y′ + P (x)y = 0 (iv)
tiene solición, y si tal solución es única dentro de un problema con condición inicial. Laidea para resolver este tipo de ecuaciones diferenciales “sencillas” es básicamente “despe-jar” la función y, pero teniendo en cuenta que aparece su derivada.
Sea I un intervalo donde está definida y. Si suponemos que y no se anula en I , entoncespodemos reescribir (iv) como
y′
y= −P (x). (v)
Ahora, podemos expresar (v) como
(log |y|)′ = −P (x).
Entonces, tenemos lo siguiente:
(log |y|)′ = −P (x)
log |y| = −∫P (x)dx+ C
|y| = Ke−A(x),
donde A(x) =∫P (x)dx es una primitiva de P (x), y K > 0 es una constante real. Tenga
en cuenta que y solo puede ser positiva o negativa, ya que y no cambia de signo al asumirque y(x) 6= 0 para todo x ∈ I . Entonces, |y(x)| = y(x) o |y(x)| = −y(x) para todo x ∈ I , yel signo de la función y es luego absorbido por la constante K. Por lo tanto, tenemos que
y(x) = Ke−A(x)
donde A(x) =∫P (x)dx es una primitiva de P (x), y K ∈ R.
Con los argumentos anteriores ya tenemos un candidato a solución para las ecuacionesdiferenciales lineales homogéneas. Formalizaremos esto en el siguiente resultado.
Teorema 5.1.5. Sea P : I → R una función continua en un intervalo I , y sean a ∈ I y b ∈ R.Entonces, existe una única función y = y(x) que resuelve el problema de valores iniciales{
y′ + P (x)y = 0,y(a) = b.
6

Tal función y viene dada pory(x) = be−A(x),
donde A(x) =∫ xaP (t)dt.
Demostración: Consideremos la función y(x) = be−A(x) conA(x) =∫ xaP (t)dt, y verifique-
mos que es solución del problema de valores iniciales. Primero, tenemos que
y′ + P (x)y = (be−A(x))′ + P (x)be−A(x)
= be−A(x)(−A(x))′ + bP (x)e−A(x)
= −bP (x)e−A(x) + bP (x)e−A(x) (por el Teorema Fundamental del Cálculo)= 0.
Tenemos entonces que y(x) = be−A(x) es una solución de y′ + P (x)y = 0. Por otro lado,y(a) = be−A(a) = be0 = b.
Ahora probemos que y(x) = be−A(x) es la única solución al problema de valores iniciales.Supongamos que existe otra solución g(x) con g(a) = b. Queremos probar que g(x) =be−A(x) para todo x ∈ I , o equivalentemente, que g(x)eA(x) = b. Consideremos la funciónh(x) = g(x)eA(x). Tenemos que
h′(x) = (g(x)eA(x))′ = g′(x)eA(x) + g(x)A′(x)eA(x)
= g′(x)eA(x) + g(x)P (x)eA(x)
= (g′(x) + P (x)g(x))eA(x) = 0.
Como h′(x) = 0 para todo x ∈ I , tenemos que h(x) es una constante, digamos K. Luego,g(x)eA(x) = K para todo x ∈ I , es decir, g(x) = Ke−A(x). Usando la condición de queg(a) = b, podemos deducir que K = b. Por lo tanto, g(x) = be−A(x) y el problema dado decondiciones iniciales tiene solución única.
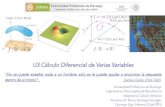
Ejemplo 5.1.6 (Desintegración radiactiva). Ciertos elementos químicos presentan un núcleoatómico inestable y pasan por un proceso, llamado desintegración radiactiva, por el cual pierdenenergía al emitir radiación. La cantidad que se tenga de dicho elemento se va desintegrando, y lavelocidad a la cual lo hace depende de su coeficiente de desintegración.
Estos elementos químicos inestables tienen la propiedad de que su velocidad de desintegración encada instante es directamente proporcional a la cantidad de sustancia de dicho elemento que se tengaen ese momento. De manera más específica, si y(t) representa la cantidad de elemento químico enun instante t, entonces y′(t) representa su velocidad de desintegración y además:
y′ = −ky,
7

donde k ∈ R es una constante positiva, llamada coeficiente de desintegración. Esta constantek depende de cada elemento químico, y la ecuación anterior tienen signo negativo del lado derechoporque la cantidad de material decrece a medida que pasa el tiempo.
Sabemos por el teorema anterior que toda solución y(t) de la ecuación y′ = −ky viene dada por
y(t) = y(0)e−A(t),
donde A(t) =∫ t0kdx = kt, es decir,
y(t) = y(0)e−kt.
Tenga en cuenta que el intervalo I donde estamos trabajando en este caso es I = [0,+∞). Entonces,y(0)e−kt nos dice la cantidad de elemento químico radiactivo que se tiene en un instante t, dondey(0) es la cantidad inicial que se tiene de dicho elemento. Podemos observar que esta función y(t)nunca se hace cero, por lo que no es posible medir el tiempo total de vida de un elemento radiactivo.Es por esta razón que suele considerarse únicamente el tiempo para que el elemento se degrade enuna determinada fracción, y por lo general se elige 1/2. Específicamente, el tiempo T para el cualy(T )/y(0) = 1/2 se denomina vida media del elemento, y se trata del tiempo necesario para quela cantidad de dicho elemento radiactivo se reduzca a la mitad. Así tenemos
1
2= e−kT
−kT = log(1/2) = −log(2)
T =log(2)
k.
Se puede calcular entonces la vida media de un elemento conociendo únicamente su coeficiente dedesintegración.
Desintegración radiactiva con vida media T .(Imagen tomada de Calculus Vol. 1 - T. Apostol).
8

Ecuaciones diferenciales lineales de primer orden no homogéneas
Ahora estudiemos el caso más general donde tenemos una ecuación diferencial lineal nohomogénea.
Teorema 5.1.7. Sean P,Q : I → R funciones continuas donde I es un intervalo. Sea ademása ∈ I un punto cualquiera y b ∈ R. Entonces, existe una función y = y(x) que es solución delproblema de condiciones iniciales {
y′ + P (x)y = Q(x),y(a) = b.
en el intervalo I . Tal función y viene dada por
y(x) = be−A(x) + e−A(x)∫ x
a
Q(t)eA(t)dt,
donde A(x) =∫ xaP (t)dt. Esta solución es única en el siguiente sentido: si y1(x) y y2(x) son dos
soluciones del problema anterior, entonces y1(x)− y2(x) = be−A(x).
Demostración: Veamos primero cómo generar una posible solución de y′+P (x)y = Q(x).Tenemos los siguientes cálculos a partir de la ecuación anterior:
y′ + P (x)y −Q(x) = 0
(y′ + P (x)y)eA(x) −Q(x)eA(x) = 0
(y′eA(x) + (A′(x)eA(x))y) = Q(x)eA(x)
(yeA(x))′ = Q(x)eA(x)
yeA(x) =
∫ x
a
Q(t)eA(y)dt (Teorema Fundamental del Cálculo)
y = e−A(x)∫ x
a
Q(t)eA(y)dt.
La función y0(x) = e−A(x)∫ xaQ(t)eA(y)dt es una solución particular de y′ + P (x)y = Q(x).
Por otro lado, consideremos la solución be−A(x) del problema de valores iniciales{y′ + P (x)y = 0,y(a) = b.
Entonces, y0(x) + be−A(x) también es solución de y′ + P (x)y = Q(x). En efecto,
(y0(x) + be−A(x))′ + P (x)(y0(x) + be−A(x)) = y′0(x)− bA′(x)e−A(x) + P (x)y0(x) + bP (x)e−A(x)
= (y′0(x) + P (x)y0(x))− bP (x)e−A(x) + bP (x)e−A(x).
9

Es decir, (y0(x) + be−A(x))′+P (x)(y0(x) + be−A(x)) = Q(x). Para esto hemos usado el hechode que si a toda solución de y′ + P (x)y = Q(x) le sumamos una solución del problemahomogéneo y′+P (x)y = 0, entonces obtenemos una nueva solución de y′+P (x)y = Q(x).Tenemos por lo tanto la función
y1(x) = be−A(x) + e−A(x)∫ x
a
Q(t)eA(y)dt,
con x ∈ I , como solución de y′ + P (x)y = Q(x). Además,
y1(a) = be−A(a) + e−A(a)∫ a
a
Q(t)eA(y)dt = b.
Así, esta función y1(x) es una solución del problema de valores iniciales planteado. Probe-mos ahora que es la única solución en el sentido descrito en el enunciado. Sea y2(x) otrasolución, con y2(a) = b. Entonces,
y′1(x) + P (x)y1(x) = Q(x) = y′2(x) + P (x)y2(x)
(y′1(x)− y′2(x)) + P (x)(y1(x)− y2(x)) = 0.
Luego, y1(x)− y2(x) es solución del problema de valores iniciales{y′ + P (x)y = 0,y(a) = b.
Por lo tanto,y1(x)− y2(x) = be−A(x).
Observación 5.1.8.
1. El teorema anterior también se puede demostrar con un procedimiento denominado métodode variación de constantes. No vamos a dar la descripción general de dicho método porser un ejercicio del práctico (ver Ejercicio 3. del Práctico 5), sin embargo, lo vamos a ilustrarcon un ejemplo.
2. Supongamos que las funciones P y Q son constantes, digamos P (x) = a y Q(x) = b paratodo x ∈ I . Tenemos entonces la ecuación y′ + ay = b. Si b = 0, tenemos entonces unaecuación diferencial de primer orden lineal homogénea y′ + ay = 0, que ya sabemos cómoresolver. Si b 6= 0, entonces es muy fácil hallar una solución particular de y′ + ay = b. Enefecto, basta tomar yP (x) = b
a. Verifique que tal yP es una solución particular. Luego, en
este caso, la solución general de y′ + ay = b viene dada por y(x) = Ce−Ax + ba, donde A(x)
es una primitiva de P (x).
10

Ejemplo 5.1.9. Hallar todas las soluciones de la ecuación diferencial
xy′ + (1− x)y = e2x
en el intervalo (0,+∞).
Resolveremos este ejemplo usando el método de variación de constantes:
• Paso 1: Hallamos la solución general de la ecuación lineal homogénea xy′ + (1 − x)y = 0.Tenemos que
xy′ + (1− x)y = 0
xy′ = (x− 1)y
y′
y=x− 1
x∫y′
ydx =
∫x− 1
xdx =
∫1dx−
∫1
xdx = x− log |x|+ C
log |y| = x− log |x|+ C
y = Kex−log |x|.
Trabajaremos en el intervalo (0,+∞) para sustituir |x| = x. El caso donde el dominio aconsiderar es (−∞, 0) es análogo. Por lo tanto, la solución general de la ecuación homogéneaxy′ + (1− x)y = 0 en el intervalo (0,+∞) viene dada por
yH(x) = Kex−log(x) =Kex
x.
• Paso 2: Hallamos una solución particular de xy′ + (1 − x)y = e2x suponiendo que K en lasolución anterior es una función que depende de x. Es decir, vamos a plantear a
yP (x) =K(x)ex
x
como solución particular de xy′ + (1− x)y = e2x, y hallaremos K(x) para que tal condiciónse cumpla.
Tenemos entonces que
e2x = xy′P (x) + (1− x)yP (x) = x
(K(x)ex
x
)′+ (1− x)
K(x)ex
x
= x
(K ′(x)xex +K(x)xex −K(x)ex
x2
)+ (1− x)
K(x)ex
x
11

=K ′(x)xex +K(x)xex −K(x)ex
x+ (1− x)
K(x)ex
x
= K ′(x)ex +K(x)ex − K(x)ex
x+K(x)ex
x−K(x)ex
= K ′(x)ex,
K ′(x) =e2x
ex= ex,
K(x) = ex.
Así,
yP (x) =e2x
x,
con x > 0.
• Paso 3: La solución general de xy′+(1−x)y = e2x viene dada por la suma de yH(c) y yP (x).Por lo tanto, la solución genereal del problema viene dada por
y(x) = yH(x) + yP (x) =Kex
x+e2x
x=K + ex
xex,
con x > 0.
Presentemos ahora un par de ejemplos prácticos.
Ejemplo 5.1.10 (Movimiento en caída libre). Supongamos que dejamos caer una pelota de masam desde cierta altura. Esta pelota describe en su caída un movimiento rectilíneo, y su velocidad ven cada instante está determinada por dos factores, a saber, la aceleración de gravedad g (constante)y la resistencia del aire. Aquí actúan dos fuerzas sobre la pelota mientras cae: su peso dado pormg, y la resistencia del aire, la cual se sabe que es proporcional a la velocidad de la pelota en razónde una constante k > 0. Esta última fuerza actúa sobre la pelota en sentido contrario a su peso,es decir, −kv. Tenemos entonces que la fuerza resultante actuando sobre la pelota viene dada pormg − kv, y según la Segunda Ley de Newton, o Ley Fundamental de la Dinámica, tenemos quemg − kv = ma donde a = v′ es la aceleración instantánea de la pelota. Tenemos así la siguienteecuación diferencial que describe la velocidad de la pelota:
mv′ + kv = mg,
es decir,
v′ +k
mv = g.
12

Como la pelota parte del reposo, ya que se deja caer, sabemos que v(0) = 0, por lo que tenemos elsiguiente problema de condiciones iniciales:{
v′ + kmv = g,
v(0) = 0.
Para hallar la función v(t) de la velocidad instantánea, primero vamos a encontrar una solución dela ecuación v′ + k
mv = 0. Tenemos que
v′ +k
mv = 0
v′ = − kmv
v′
v= − k
m
(log(v))′ = − km
log(v) = − kmt+ C
vH(t) = Ke−kmt, (con t ≥ 0).
Para la ecuación v′ + kmv = g, es fácil ver que la constante mg
kes una solución particular, es decir,
tomamos
vP (t) =mg
k, (con t ≥ 0).
Luego, la solición general de la ecuación v′ + kmv = g viene dada por
v(t) = vH(t) + vP (t) = Ke−kmt +
mg
k, (con t ≥ 0).
Finalmente, hallamos la solución que satisfaga la condición inicial v(0) = 0. Dicha condición nosarrojará un valor particular de K:
0 = v(0) = Ke−km0 +
mg
k= K +
mg
k.
Entonces, K = −mgk
, y por lo tanto
v(t) = −mgke−
kmt +
mg
k=mg
k(1− e−
kmt), (con t ≥ 0),
es la solución del problema de valores iniciales planteado.
13

Ejemplo 5.1.11 (Enfriamiento de un cuerpo). Supongamos que tenemos un cuerpo con unatemperatura determinada, el cual se sumerge en un medio del cual consideramos también su tem-peratura. Para ejemplificar, imaginemos que sacamos un trozo de hielo de la heladera y lo sumergi-mos en un vaso con agua o jugo. Al hacer esto, la temperatura del trozo de hielo va a cambiar.¿Cómo lo hace? La Ley de Enfriamiento de Newton (sí, otra vez Newton, ¡un grande!) nos diceque el cambio de temperatura del hielo en cada instante es directamente proporcional a la diferenciaentre su temperatura y la temperatura del agua. Hablando en lenguaje matemático, si denotamospor H(t) y A(t) las temperaturas del hielo y del agua en el instante t, respectivamente, tenemosque
H ′(t) = −k(H(t)− A(t)),
donde k > 0 es una constante. Podemos suponer que conocemos la función A(t) (por ejemplo, quetenemos un registro constante de la temperatura del agua mediante un termómetro). Dada estasituación, podemos hallar la función H(t) resolviendo la ecuación diferencial anterior, la cual es deltipo lineal no homogénea:
H ′(t) + kH(t) = kA(t).
Primero resolvemos la ecuación homogénea H ′(t) + kH(t) = 0, la cual tiene por solución general
H0(t) = Ce−kt.
Para hallar una solución particular de H ′(t) + kH(t) = kA(t), usamos el método de variación deconstantes. Proponemos
HP (t) = C(t)e−kt.
Luego,
kA(t) = H ′P (t) + kHP (t)
= C ′(t)e−kt − kC(t)e−kt + kC(t)e−kt
= C ′(t)e−kt
C ′(t) = kA(t)ekt
C(t) = k
∫ t
0
A(s)eksds.
Tenemos entonces:
HP (t) = ke−kt∫ t
0
A(s)eksds.
Por lo tanto, la solución general de H ′(t) + kH(t) = kA(t) viene dada por
H(t) = H0(t) +HP (t) = Ce−kt + ke−kt∫ t
0
A(s)eksds =
(C + k
∫ t
0
A(s)eksds
)e−kt.
14

Supongamos ahora que el hielo está a −20◦ (Celsius) justo al hacer contacto con el agua, es decir,H(0) = −20◦. Hallemos C con este dato particular:
−20 = H(0) =
(C + k
∫ 0
0
A(s)eksds
)e−k0 = (C + k · 0)e0 = C.
Entonces,
H(t) =
(−20 + k
∫ t
0
A(s)eksds
)e−kt
es la solución al problema de valores iniciales que nos planteamos.
Ecuaciones diferenciales de primer orden de variables separables
Aquí analizaremos un caso no lineal de ecuaciones diferenciales de primer orden. En gen-eral, sabemos que las ecuaciones diferenciales de primer orden tienen la forma y′ = h(x, y).En algunos casos, la expresión h(x, y) aparece como el producto de dos funciones, unaque depende únicamente de x, y la otra que depende únicamente de y, es decir, h(x, y) =Q(x)R(y). En este tipo de ecuaciones diferenciales, conocidas como de variables separables,siempre es posible “despejar” la función y.
Definición 5.1.12. Una ecuación diferencial de primer orden se dice de variables separables sitiene la forma
y′ = Q(x)R(y),
donde Q y R son funciones de valores reales, y continuas en sus respectivos dominios.
Ejemplo 5.1.13.
1. La ecuación xy′ + y = y2 es de variable separables, ya que se puede reescribir como
y′ =1
x(y2 − y).
En este caso, Q(x) = 1/x y R(y) = y2 − y. La ecuación y′ = log(x + y), por otro lado, noes de variables separables.
2. Toda ecuación diferencial de primer orden lineal homogénea y′ + P (x)y = 0 es de variablesseparables, ya que y′ = (−P (x))y. En este caso, Q(x) = −P (x) y R(y) = y.
Así como hemos hecho con las ecuaciones diferenciales de primer orden lineales, probare-mos también que las ecuaciones de variables separables siempre tiene solución.
15

Primero analizaremos el caso más sencillo. Supongamos que en la ecuación y′ = Q(x)R(y)existe λ ∈ R tal que R(λ) = 0. Proponemos como solución y(x) = λ, para todo x en eldominio considerado. Entonces, y′ = 0 = Q(x) · 0 = Q(x)R(λ).
Ahora estudiemos el caso R(y) 6= 0. En esta situación es posible dividir por R(y), y asítenemos
y′
R(y)= Q(x).
Integramos en ambos lados de la igualdad:∫y′
R(y)dx =
∫Q(x)dx+ C.
Acá∫Q(x)dx + C denota la familia de primitivas de Q. Por otro lado, para resolver∫
y′
R(y)dx debemos hallar una primitiva de la función 1/R. Una vez hecho esto, será posible
hallar la función y. Especifiquemos esto en el siguiente resultado.
Teorema 5.1.14. Sea y′ = Q(x)R(y) una ecuación diferencial de primer orden de variables sep-arables, con Q y R continuas en sus respectivos dominios y R 6= 0. Entonces, las siguientesafirmaciones son equivalentes:
(a) y(x) es solución de la ecuación y′ = Q(x)R(y).
(b) y(x) satisface la igualdad
G(y) =
∫Q(x)dx+ C,
dondeG es una primitiva de 1/R,∫Q(x)dx es una primitiva deQ, yC es una constante real.
Demostración: Supongamos primero que y(x) es una solución de y′ = Q(x)R(y). Aldividir por R(y) e integrar obtenemos la igualdad∫
y′
R(y)dx =
∫Q(x)dx+ C.
Ahora, sea G una primitiva de la función 1/R (la cual existe ya que 1/R es continua, porser R continua y no nula). Tenemos entonces que la igualdad anterior se puede reescribircomo
G(y) =
∫Q(x)dx+ C.
Ahora supongamos que y(x) es una función que satisface la igualdadG(y) =∫Q(x)dx+C,
donde G es una primitiva de 1/R. Al derivar, obtenemos G′(y)y′ = Q(x), ya que∫Q(x)dx
es una primitiva de Q. Luego, como G es una primitiva de 1/R, tenemos que G′(y) =
16

1/R(y). Entonces,y′
R(y)= Q(x),
es decir,y′ = Q(x)R(y),
y por lo tanto y(x) es solución de la ecuación diferencial y′ = Q(x)R(y).
Ejemplo 5.1.15.
1. Resolvamos la ecuación diferencial xy + y = y2 del ejemplo anterior. Tenemos que:
y′
y2 − y=
1
x∫y′
y2 − ydx =
∫1
xdx+ C = log |x|+ C.
Para la primitiva de la izquierda, hacemos el cambio de variables u = y y du = y′dx.Entonces, ∫
y′
y2 − ydx =
∫1
u2 − udu =
∫1
u− 1du−
∫1
udu
= log |u− 1| − log |u| = log
∣∣∣∣u− 1
u
∣∣∣∣ = log
∣∣∣∣1− 1
u
∣∣∣∣= log
∣∣∣∣1− 1
y
∣∣∣∣ .Entonces,
log
∣∣∣∣1− 1
y
∣∣∣∣ = log |x|+ C.∣∣∣∣1− 1
y
∣∣∣∣ = K|x| (donde K = eC 6= 0)
Podemos reescribir la igualdad anterior como 1− 1y
= K|x|, ya que el signo ± que se generedel valor absoluto es “absorbido” por la constante K. Luego,
1− 1
y= K|x|
−1
y= K|x| − 1
17

1
y= 1−K|x|
y =1
1−K|x|.
Volviendo a repetir el argumento del valor absoluto, podemos concluir que las soluciones dela ecuación diferencial vienen dadas por
y(x) =1
1−Kx.
Tenemos una solución para cada valor de K, digamos yK(x) = 11−Kx , cada una de ellas con
dominio R−{0, 1K}. Nótese que hemos excluido 0 del dominio ya que al resolver la ecuación,
hemos tenido que dividir por x en el proceso de separación de variables.
2. Resolvamos la ecuación diferencial
xyy′ = 1 + x2 + y2 + x2y2.
Separamos variables:
xyy′ = 1 + x2 + y2 + x2y2 = (1 + x2) + (1 + x2)y2 = (1 + x2)(1 + y2)
yy′
1 + y2=
1 + x2
x=
1
x+ x∫
yy′
1 + y2dx =
∫ (1
x+ x
)dx+ C =
∫1
xdx+
∫xdx+ C = log |x|+ x2
2+ C
Para resolver∫
yy′
1+y2dx, hacemos el cambio de variables u = y y du = dy:∫yy′
1 + y2dx =
∫u
1 + u2du =
1
2log(1 + u2) = log(
√1 + y2).
Entonces,
log(√
1 + y2) = log |x|+ x2
2+ C√
1 + y2 = K|x|ex2/2 (donde K = eC > 0)
1 + y2 = Lx2ex2
(donde L = K2 > 0)
y2 = Lx2ex2 − 1
y = ±√Lx2ex2 − 1
18

Tenemos entonces dos soluciones generales
y1(x) =√Lx2ex2 − 1 y y2(x) = −
√Lx2ex2 − 1,
cuyo dominio de definición son todos los reales x tales que Lx2ex2 − 1 ≥ 0.
5.2 Ecuaciones diferenciales de segundo orden
En esta segunda parte estudiaremos cómo resolver algunas ecuaciones diferenciales deorden dos.
Definición 5.2.1. Una ecuación diferencial de orden dos o de segundo orden es una igualdadde la forma
y′′ + P (x)y′ +Q(x)y = R(x),
donde P (x), Q(x) y R(x) son funciones continuas en sus respectivos dominios. A toda funcióny = y(x) que satisfaga esta igualdad se le llama solución de la ecuación.
Ejemplo 5.2.2. Los siguientes son ejemplos de ecuaciones diferenciales de segundo orden:
1. y′′ + 2y′ + 3y = 0.
2. xy′′ + 4y = x3 + 6x.
3. y′′ + sen(x)y′ + y = e5x.
En este curso nos enfocaremos en ecuaciones que son como 1. y 2., es decir, aquéllas paralas cuales las funciones P y Q son constantes. Cuando esto no ocurre, resolver la ecuaciónpuede volverse un problema bastante complicado, y por las limitaciones de tiempo y con-tenidos de este curso no cubriremos estos casos generales.
Ecuaciones diferenciales de segundo orden homogéneascon coeficientes constantes
Analicemos primero el caso particular en el cual las funciones P y Q son constantes cua-lesquiera, y R es cero.
Definición 5.2.3. Una ecuación diferencial de segundo orden se dice homogénea con coefi-cientes constantes si es de la forma y′′ + ay′ + by = 0, donde a, b ∈ R.
19

Con las ecuaciones diferenciales de primer orden lineales homogéneas y con coeficientesconstantes, es decir, aquéllas de la forma y′ + by = 0, vimos que todas las soluciones sony(x) = Ke−bx con K ∈ R. Entonces es natural preguntarse si estas soluciones tambiénsirven para resolver ecuaciones del mismo tipo pero con el orden aumentado.
Teniendo en cuenta la curiosidad anterior, vamos a proponer a la función eλx como solu-ción de y′′ + ay′ + by = 0 y veamos qué condiciones debe cumplir λ para que esto ocurra.Tenemos así lo siguiente:
0 = (eλx)′′ + a(eλx)′ + b(eλx) = λ2eλx + aλeλx + beλx = (λ2 + aλ+ b)eλx
0 = λ2 + aλ+ b.
Es decir, para que eλx sea solución de y′′ + ay′ + by = 0, λ debe ser raíz del polinomioλ2 + aλ+ b. Nos referiremos a la igualdad
λ2 + aλ+ b = 0
como ecuación característica de y′′ + ay′ + by = 0.
A partir de este momento pueden ocurrir tres escenarios con respecto a las raíces deλ2 + aλ+ b:
(i) λ2 + aλ+ b tiene dos raíces reales diferentes.
(ii) λ2 + aλ+ b tiene una sola raíz real de multiplicidad dos.
(iii) λ2 + aλ+ b tiene dos raíces complejas (conjugadas).
Estudiemos lo que ocurre en cada caso.
(i) λ2 + aλ+ b tiene dos raíces reales diferentes:
En este caso, el discriminante ∆ = a2 − 4b del polinomio λ2 + aλ + b es positivo.Sean λ1 y λ2 las dos raíces reales de λ2 + aλ + b. Tenemos entonces que tanto eλ1x
como eλ2x son soluciones de la ecuación diferencial y′′+ ay′+ by = 0. ¿Será que estassoluciones son suficientes para hallar la solución general de esta ecuación? Dentrode poco responderemos a esto afirmativamente.
(ii) λ2 + aλ+ b tiene una sola raíz real de multiplicidad dos:
Aquí tenemos el discriminante nulo ∆ = a2 − 4b = 0. Sea λ la única raíz real deλ2 +aλ+b de multiplicidad dos. Tenemos que eλx (y cualquier múltiplo escalarKeλx
con K ∈ R) es una solución de y′′ + ay′ + by = 0. ¿Es posible hallar otra?
20

En esta situación se vuelve a presentar otro paralelismo con las ecuaciones diferen-ciales de primer orden lineales. A saber, vamos a usar la idea detrás del método devariación de constantes para producir otra solución de y′′ + ay′ + by = 0. Específica-mente, vamos a suponer que K(x)eλx es una solución de y′′ + ay′ + by = 0 y vamosa deducir cúal es la función K(x). Tenemos así lo siguiente:
0 = (K(x)eλx)′′ + a(K(x)eλx)′ + b(K(x)eλx)
= (K ′(x)eλx + λK(x)eλx)′ + a(K ′(x)eλx + λK(x)eλx) + bK(x)eλx
= K ′′(x)eλx + λK ′(x)eλx + λK ′(x)eλx + λ2K(x)eλx + aK ′(x)eλx + aλK(x)eλx + bK(x)eλx
= (K ′′(x) + (2λ+ a)K ′(x) + (λ2 + aλ+ b)K(x))eλx
0 = K ′′(x) + (2λ+ a)K ′(x) + (λ2 + aλ+ b)K(x).
Sabemos que λ2 + aλ+ b = 0. Por otro lado, ∆ = 0 implica que λ = −a/2, por lo cual2λ+ a = 0. Entonces,
0 = K ′′(x) + (2λ+ a)K ′(x) + (λ2 + aλ+ b)K(x)
se convierte en0 = K ′′(x).
Recordemos que queremos una función K(x) que cumpla con lo anterior, por lo quebasta tomar K(x) = x. Entonces, xeλx también es solución de y′′ + ay′ + by = 0.
(iii) λ2 + aλ+ b tiene dos raíces complejas (conjugadas):
Para el caso ∆ < 0, tenemos dos raíces complejas conjugadas, digamos λ = α + iβy λ = α − iβ. A pesar de que en este caso λ = α + iβ es un número complejo,sustituir α + iβ en eλx nos puede dar una idea de cómo son algunas soluciones dey′′ + ay′ + by = 0:
eλx = e(α+iβ)x = eαx+iβx = eαxeiβx = eαx(cos(βx) + isen(βx))
eλx = eαxcos(βx) + ieαxsen(βx).
Lo anterior hace preguntarnos si eαxcos(βx) y eαxsen(βx) son soluciones de la ecuacióny′′ + ay′ + by = 0. Vamos a comprobar que sí para eαxcos(βx). En efecto,
(eαxcos(βx))′′ + a(eαxcos(βx))′ + b(eαxcos(βx)) =
= (αeαxcos(βx)− βeαxsen(βx))′ + a(αeαxcos(βx)− βeαxsen(βx)) + beαxcos(βx)
= α2eαxcos(βx)− αβeαxsen(βx)− αβeαxsen(βx)− β2eαxcos(βx)
aαeαxcos(βx)− aβeαxsen(βx) + beαxcos(βx)
= (α2 − β2 + aα + b)eαxcos(βx)− (2αβ + aβ)eαxsen(βx).
21

Como α + iβ es raíz de λ2 + aλ+ b = 0, tenemos que
0 = (α + iβ)2 + a(α + iβ) + b
= (α2 + i2αβ − β2) + aα + iaβ + b
= (α2 − β2 + aα + b) + i(2αβ + aβ),
lo cual a su vez implica que α2 − β2 + aα + b = 0 y 2αβ + aβ = 0 (recuerde que unnúmero complejo es cero si sus partes real e imaginaria son cero). Entonces:
(eαxcos(βx))′′ + a(eαxcos(βx))′ + b(eαxcos(βx)) =
= (α2 − β2 + aα + b)eαxcos(βx)− (2αβ + aβ)eαxsen(βx)
= 0 · eαxcos(βx)− 0 · eαxsen(βx)
= 0.
Por lo tanto, eαxcos(βx) es una solución de y′′ + ay′ + by = 0. De manera similar, sepuede ver que lo mismo es válido para eαxsen(βx).
A partir de las observaciones anteriores, vamos a poder construir en cada caso la solucióngeneral de y′′ + ay′ + by = 0. Empecemos con el siguiente resultado. En lo que sigue,denotaremos por C0(R) al espacio vectorial real de todas las funciones continuas R→ R.
Proposición 5.2.4 (principio de superposición I). La ecuación diferencial y′′ + ay′ + by = 0tiene al menos una solución. Más aún, si y1(x) e y2(x) son soluciones de esta ecuación, entoncesC1y1(x) + C2y2(x) también lo es para cualesquiera C1, C2 ∈ R. En otras palabras, el conjunto desoluciones de la ecuación y′′ + ay′ + by = 0 es un subespacio vectorial real de C0(R).
Demostración: La afirmación de que y′′ + ay′ + by = 0 tiene al menos una solución yafue probada en el análisis anterior sobre el discriminante ∆ de la ecuación característicaλ2 + aλ + b = 0. Consideremos ahora dos soluciones y1(x) e y2(x), junto con C1, C2 ∈ R.Tenemos entonces lo siguiente:
(C1y1(x) + C2y2(x))′′ + a(C1y1(x) + C2y2(x))′ + b(C1y1(x) + C2y2(x)) =
= (C1y′′1(x) + C2y
′′2(x)) + a(C1y
′1(x) + C2y
′2(x)) + b(C1y1(x) + C2y2(x))
= C1(y′′1(x) + ay′1(x) + by1(x)) + C2(y
′′2(x) + ay′2(x) + by2(x))
= C1 · 0 + C2 · 0= 0.
Por lo tanto, C1y1(x) + C2y2(x) es una solución de y′′ + ay′ + by = 0.
22

Teorema 5.2.5 (subespacio de soluciones). Sea S el subespacio vectorial real de C0(R) de todaslas soluciones de y′′ + ay′ + by = 0. Entonces, S tiene dimensión dos.
Demostración: Debemos hacer un análisis por casos considerando el signo que toma eldiscriminante ∆ de λ2 + aλ+ b.
(i) ∆ > 0: Ya sabemos que y1(x) = eλ1x e y2(x) = eλ2x son soluciones de y′′+ay′+by = 0,donde λ1 y λ2 son las raíces de λ2 + aλ+ b. Veamos que {eλ1x, eλ2x} es una base de S.
Lo primero que vamos a probar es que {eλ1x, eλ2x} es un conjunto linealmente in-dependiente. Supongamos que C1e
λ1x + C2eλ2x = 0, y veamos que C1 = C2 = 0.
Tenemos lo siguiente:
C1eλ1x + C2e
λ2x = 0
(C1eλ1x + C2e
λ2x)e−λ2x = 0 · e−λ2x
C1e(λ1−λ2)x + C2 = 0.
Haciendo x = 0, obtenemos C1 + C2 = 0. Por otro lado, haciendo x = 1/(λ1 − λ2)(tenga en cuenta que λ1 6= λ2), obtenemos C1e+C2 = 0. Nos queda así el sistema deecuaciones lineales homogéneo: {
C1 + C2 = 0,C1e+ C2 = 0,
el cual claramente tiene solución (única) C1 = C2 = 0. Entonces, {eλ1x, eλ2x} es unconjunto linealmente independiente.
Veamos ahora que {eλ1x, eλ2x} genera a S. Sea y(x) ∈ S. Queremos demostrar queexisten C1, C2 ∈ R tales que
y(x) = C1eλ1x + C2e
λ2x.
Evaluando en x = 0, tenemos y(0) = C1 + C2. Por otro lado, consideremos también
y′(x) = C1λ1eλ1x + C2λ2e
λ2x.
Evaluando en x = 0, tenemos y′(0) = C1λ1 + C2λ2. Sustituimos en esta últimaigualdad la expresión C2 = y(0)− C1:
y′(0) = C1λ1 + C2λ2
y′(0) = C1λ1 + λ2(y(0)− C1)
y′(0) = (λ1 − λ2)C1 + λ2y(0).
23

Entonces,
C1 =y′(0)− λ2y(0)
λ1 − λ2,
C2 = y(0)− C1 = y(0)− y′(0)− λ2y(0)
λ1 − λ2=λ1y(0)− y′(0)
λ1 − λ2
Por lo tanto, tenemos
y(x) =y′(0)− λ2y(0)
λ1 − λ2eλ1x +
λ1y(0)− y′(0)
λ1 − λ2eλ2x
(ii) Para el caso ∆ = 0, probaremos que {eλx, xeλx} es una base de S.
Primero veamos que {eλx, xeλx} es un conjunto linealmente independiente. Supon-gamos que
C1eλx + C2xe
λx = 0.
Haciendo x = 0, tenemos C1 = 0. Luego, la igualdad C1eλx+C2xe
λx = 0 se convierteen C2xe
λx = 0. Ahora, haciendo x = 1 obtenemos C2eλ = 0. Como eλ 6= 0, nos queda
C2 = 0. Por lo tanto, {eλx, xeλx} es linealmente independiente.
Ahora probemos que {eλx, xeλx} genera a S. Sea y(x) ∈ S. Queremos hallar C1, C2 ∈R tales que
y(x) = C1eλx + C2xe
λx.
Como en el caso anterior, consideremos también
y′(x) = (C1λ+ C2)eλx + C2λxe
λx.
Al evaluar en x = 0, obtenemos C1 = y(0) y y′(0) = C1λ+C2 = y(0)λ+C2, de dondeC2 = y′(0)− y(0)λ. Por lo tanto,
y(x) = y(0)eλx + (y′(0)− y(0)λ)xeλx.
(iii) Para el caso ∆ < 0, probaremos que {eαxcos(βx), eαxsen(βx)} es una base de S.Supongamos primero que
C1eαxcos(βx) + C2e
αxsen(βx) = 0.
Evaluando en x = 0 obtenemosC1 = 0, y asíC2eαxsen(βx) = 0. Luego,C2sen(βx) = 0
ya que eαx 6= 0. Como C2sen(βx) = 0 se cumple para todo x ∈ R, debe ocurrir queC2 = 0. Por lo tanto, {eαxcos(βx), eαxsen(βx)} es un conjunto linealmente independi-ente.
24

Ahora veamos que {eαxcos(βx), eαxsen(βx)} genera a S. Sea y(x) ∈ S. Queremoshallar C1, C2 ∈ R tales que
y(x) = C1eαxcos(βx) + C2e
αxsen(βx).
Tendrá que ocurrir también que
y′(x) = C1(αeαxcos(βx)− βeαxsen(βx)) + C2(αe
αxsen(βx) + βeαxcos(βx))
= (C1α + C2β)eαxcos(βx) + (C2α− C1β)eαxsen(βx).
Evaluando en x = 0 las expresiones para y(x) e y′(x) tenemos
y(0) = C1,
y′(0) = C1α + C2β = y(0)α + C2β
C2 =y′(0)− y(0)α
β.
En la igualdad anterior tenga en cuenta que β 6= 0 ya que λ2 + aλ+ b = 0 tiene raícescomplejas. Por lo tanto,
y(x) = y(0)eαxcos(βx) +y′(0)− y(0)α
βeαxsen(βx).
Observación 5.2.6. A partir del teorema anterior y observaciones previas, podemos describir lasolución general de y′′+ay′+by = 0 según el signo del discriminante ∆ de la ecuación característicaλ2 + aλ+ b = 0:
(i) ∆ > 0: La solución general viene dada por
y(x) = C1eλ1x + C2e
λ2x,
donde λ1 y λ2 son las raíces reales de λ2 + aλ+ b = 0.
(ii) ∆ = 0: La solución general viene dada por
y(x) = C1eλx + C2xe
λx = (C1 + C2x)eλx,
donde λ es la única raíz de λ2 + aλ+ b = 0 de multiplicidad dos.
(iii) ∆ < 0: La solución general viene dada por
y(x) = C1eαxcos(βx) + C2e
αxsen(βx),
donde α + iβ y α− iβ son las raíces complejas de λ2 + aλ+ b = 0.
25

Ejemplo 5.2.7. Resolvamos las siguientes ecuaciones diferenciales de segundo orden:
1. y′′ + 2y′ − 3y = 0:
La ecuación característica viene dada por λ2 + 2λ − 3 = 0. Al factorizar nos queda que(λ + 3)(λ− 1) = 0, de donde λ1 = −3 y λ2 = 1 son las raíces reales. Entonces, la solucióngeneral de y′′ + 2y′ − 3y = 0 viene dada por
y(x) = C1e−3x + C2e
x.
2. y′′ + 2y′ + 1 = 0:
En este caso tenemos la ecuación característica λ2+2λ+1 = 0, que podemos factorizar como(λ + 1)2 = 0, de donde λ = −1 es la única raíz de multiplicidad dos. La solución generalviene entonces dada por
y(x) = C1e−x + C2xe
−x.
Ejemplo 5.2.8. Resolvamos el siguiente problema de condiciones iniciales:y′′ + 25y = 0,y(3) = −1,y′(3) = 0
Lo primero que debemos hacer es hallar la solución general de y′′ + 25y = 0. Tenemos en este casola ecuación característica λ2 + 25 = 0, cuyas raíces son λ = ±5i. Entonces, la solución generalviene dada por
y(x) = C1cos(5x) + C2sen(5x).
Para resolver el problema de condiciones iniciales y(3) = −1 e y′(3) = 0, debemos evaluar la formageneral de y(x) e y′(x) en x = 3. Para la primera condición tenemos
−1 = y(3) = C1cos(15) + C2sen(15).
Por otro lado,y′(x) = −5C1sen(5x) + 5C2cos(5x),
y por la segunda condición y′(3) = 0 tenemos
0 = −5C1sen(15) + 5C2cos(15).
Nos queda el siguiente sistema de ecuaciones lineales no homogéneo para hallar los valores de C1 yC2: {
C1cos(15) + C2sen(15) = −1,−5C1sen(15) + 5C2cos(15) = 0.
26

Si dividimos la segunda ecuación por 5cos(15) obtenemos C2 = C1tan(15). Ahora, al sustituiresto último en C1cos(15) + C2sen(15) = −1 podemos deducir que C1 = −cos(15), de dondeC2 = −sen(15). Por lo tanto, la solución del problema de condiciones iniciales viene dada por
y(x) = −cos(15)cos(5x)− sen(15)sen(5x).
Ecuaciones diferenciales de segundo orden no homogéneascon coeficientes constantes
En esta última sección estudiaremos las ecuaciones diferenciales de segundo orden nohomogéneas con coeficientes constantes. Será el tipo más complicado de ecuación difer-encial estudiada en este curso.
Definición 5.2.9. Una ecuación diferencial de segundo orden se dice no homogénea con coefi-cientes constantes si tiene la forma
y′′ + ay′ + by = R(x),
donde a y b son constantes reales y R(x) es una función continua en su dominio.
La manera de resolver las ecuaciones de la definición anterior tiene un gran parecido conlas ecuaciones diferenciales de primer orden lineales no homogéneas, a saber:
1. Se calcula la solución general yH(x) de la ecuación homogénea y′′ + ay′ + by = 0.
2. Se halla una solución particular yP (x) de la ecuación y′′ + ay′ + by = R(x). Esto sehará únicamente para algunos casos según la forma que tenga la función R(x).
3. La solución general de y′′ + ay′ + by = R(x) viene dada por y(x) = yH(x) + yP (x).
El paso más problemático es claramente el 2. Cubriremos solamente tres casos básicos,relacionados con la forma de la función R(x). Lo que se expone a continuación se conocecomo método de selección:
• Caso polinomial: R(x) es un polinomio de grado n y coeficientes en R:
Para analizar poco a poco este caso, supongamos primero que R(x) = c, dondec es una constante real no nula. Entonces, si b 6= 0, podemos notar claramente queyP (x) = c/b es una solución particular de y′′+ay′+by = c. También podemos analizarel caso b = 0, donde tenemos la ecuación y′′+ ay′ = c, de donde y′+ ay = cx+ d, y elproblema se reduce a una ecuación diferencial de primer orden lineal no homogénea.En lo que sigue, vamos a asumir que b 6= 0.
27

Ahora compliquemos un poco el problema, suponiendo que R(x) = cx + d es unpolinomio de grado 1. Queremos que yP (x) sea una función tal que y′′P (x) +ay′P (x) +byP (x) = cx + d, es decir, y′′P (x) + ay′P (x) + byP (x) debe ser un polinomio de gradouno. Entonces, yP (x) debe ser un polinomio de grado 1. Se propone en este casoyP (x) = A1x + A2 como solución particular de y′′ + ay′ + by = cx + d, y al sustituiresta expresión para yP (x) en la ecuación anterior, se pueden determinar los valoresde A1 y A2.
Ya para generalizar, si R(x) es un polinomio de grado n, entonces se propone comosolución particular un polinomio genérico de grado n, es decir,
yP (x) = anxn + an−1x
n−1 + · · ·+ a1x+ a0.
Los valores ak con 0 ≤ k ≤ n se determinan al sustituir la expresión anterior eny′′ + ay′ + by = R(x). Tendremos que y′′P (x) + ay′P (x) + byP (x) será un polinomiode grado n, y por lo tanto y′′P (x) + ay′P (x) + byP (x) = R(x) será una igualdad entrepolinomios de grado n, de donde se puede determinar cada ak.
• Caso exponencial: R(x) = P (x)ecx, donde P (x) es un polinomio (de grado n):
Acá la idea proponer el cambio yP (x) = u(x)ecx, y sustituir dicha expresión en laecuación y′′ + ay′ + by = P (x)ecx para determinar la función u(x). Después de haceresto, se llegará al caso anterior, simplificándose así el problema. En efecto:
P (x)ecx = y′′P (x) + ay′P (x) + byP (x)
= (u(x)ecx)′′ + a(u(x)ecx)′ + b(u(x)ecx)
= (u′(x)ecx + cu(x)ecx)′ + a(u′(x)ecx + cu(x)ecx) + bu(x)ecx
= u′′(x)ecx + cu′(x)ecx + cu′(x)ecx + c2u(x)ecx + au′(x)ecx + acu(x)ecx + bu(x)ecx
= (u′′(x) + (a+ 2c)u′(x) + (c2 + ac+ b)u(x))ecx.
Tenemos entonces que, al dividir por ecx, obtenemos la ecuación diferencial
u′′(x) + (a+ 2c)u′(x) + (c2 + ac+ b)u(x) = P (x),
que corresponde al caso anterior.
• Caso trigonométrico: R(x) = P (x)cos(dx) o R(x) = P (x)sen(dx), donde P (x) es unpolinomio:
Este caso tiene cierto parecido con el anterior. Se propone como solución particularyP (x) = u(x)cos(dx) + v(x)sen(dx), donde u(x) y v(x) son funciones a determinar.
28

• Finalmente, tenemos el caso más general dondeR(x) = ecx(P (x)cos(dx)+Q(x)sen(dx)),en el que se propone como solución particular a
yP (x) = ecx(u(x)cos(dx) + v(x)sen(dx)),
donde u(x) y v(x) son funciones a determinar.
Puede ocurrir también el caso en el cual R(x) no sea ninguna de las funciones anteriores,pero sí una suma de éstas, digamos R(x) = R1(x) + R2(x). En este caso, para hallar unasolución particular de
y′′ + ay′ + by = R1(x) +R2(x), (vi)
se debe hallar una solución particular yP,1(x) de y′′+ay′+ by = R1(x) y una solución parti-cular yP,2(x) de y′′+ ay′+ by = R2(x). Entonces, una solución particular de (vi) viene dadapor yP (x) = yP,1(x) + yP,2(x). Esto se debe al siguiente resultado, cuya prueba dejamoscomo ejercicio.
Proposición 5.2.10 (principio de superposición II). Dada la ecuación diferencial de segundoorden
y′′ + ay′ + by = R1(x) +R2(x) + · · ·+Rm(x), (vii)
si para cada ecuación y′′ + ay′ + by = Rk(x) se tiene una solución particular yk(x), entoncesy(x) = y1(x) + y2(x) + · · ·+ ym(x) es una solución particular de (vii).
Hagamos a continuación algunos ejemplos para entender cómo usar la teoría expuesta.
Ejemplo 5.2.11. Hallemos la solución general de las siguientes ecuaciones diferenciales de segundoorden lineales no homogéneas:
1. y′′ + 4y = 3xsen(x):
Lo primero que debemos hacer es hallar la solución general de la ecuación diferencial ho-mogénea y′′ + 4y = 0. En este caso tenemos la ecuación característica λ2 + 4 = 0, la cualtiene como raíces λ = ±2i. Entonces, la solución general de y′′ + 4y = 0 viene dada por
yH(x) = C1cos(2x) + C2sen(2x).
Ahora hallemos una solución particular de y′′ + 4y = 3xsen(x) por el método de selección.Dicho método propone a yP (x) = u(x)cos(x) + v(x)sen(x) como solución particular, dondeu(x) y v(x) son funciones a determinar. Notamos de entrada que u(x) debe ser la funciónconstantemente igual a cero, ya que en la expresión y′′+4y no aparece la derivada primera dey. Luego, al sustituir yP (x) = v(x)sen(x) en y′′ + 4y = 3xsen(x), obtenemos lo siguiente:
29

3xsen(x) = y′′P (x) + 4yP (x)
= (v(x)sen(x))′′ + 4(v(x)sen(x))
= (v′(x)sen(x)− v(x)cos(x))′ + 4v(x)sen(x)
= v′′(x)sen(x) + v′(x)cos(x)− v′(x)cos(x) + v(x)sen(x) + 4v(x)sen(x)
= (v′′(x) + 5v(x))sen(x).
Lo anterior implica quev′′(x) + 5v(x) = 3x,
y debemos hallar una solución particular de esta ecuación por el método de selección para elcaso polinomial. Se propone entonces como solución particular de v′′ + 5v = 3x a vP (x) =Ax+B. Tenemos así
3x = (vP (x))′′ + 5vP (x) = (Ax+B)′′ + 5(Ax+B) = 5Ax+ 5B,
de donde 5A = 3 y 5B = 0, es decir, A = 35
y B = 0. Entonces, vP (x) = 3x5
es una soluciónparticular de v′′ + 5v = 3x, y por lo tanto
yP (x) =3x
5sen(x)
es una solución particular de y′′ + 4y = 3xsen(x).
Concluimos finalmente que la solución general de y′′ + 4y = 3xsen(x) viene dada por
y(x) = yH(x) + yP (x) = C1cos(2x) + C2sen(2x) +3x
5sen(x).
2. y′′ − 2y′ + y = x+ 2xex:
Nuevamente, lo primero que debemos hacer es hallar la solución general de y′′− 2y′+ y = 0.Tenemos la ecuación característica λ2 − 2λ+ 1 = 0, que tiene una raíz de multiplicidad dosdada por λ = 1. Para este caso tenemos la solución general
yH(x) = C1ex + C2xe
x.
La función x+2xex que determina la no homogeneidad de la ecuación y′′−2y′+y = x+2xex
es la suma de las funciones básicas x y 2xex. Por el principio de superposición, debemos hallaruna solución particular para cada una de las siguientes ecuaciones:
y′′ − 2y′ + y = x, (viii)y′′ − 2y′ + y = 2xex. (ix)
30

Para (viii) aplicamos el método de selección según el caso polinomial, y se propone a yP,1(x) =Ax+B como solución particular. Luego,
x = (yP,1(x))′′ − 2(yP,1(x))′ + yP,1(x) = (Ax+B)′′ − 2(Ax+B)′ + Ax+B
= Ax+ (B − 2A),
de dondeA = 1 yB−2A = 0, es decir,A = 1 yB = 2. Tenemos entonces que yP,1(x) = x+2es una solución particular de (viii).
Ahora para (ix) aplicamos el método de selección según el caso exponencial. Proponemos ayP,2(x) = u(x)ex como solución particular. Luego,
2xex = (yP,2(x))′′ − 2(yP,2(x))′ + yP,2(x) = (u(x)ex)′′ − 2(u(x)ex)′ + u(x)ex
= (u′(x)ex + u(x)ex)′ − 2(u′(x)ex + u(x)ex) + u(x)ex
= u′′(x)ex + u′(x)ex + u′(x)ex + u(x)ex − 2u′(x)ex − 2u(x)ex + u(x)ex
= u′′(x)ex
u′′(x) = 2x
u′(x) = x2
u(x) =x3
3,
de donde yP,2(x) = x3
3ex es una solución particular de (ix).
Entonces, por el principio de superposición, tenemos que
yP (x) = yP,1(x) + yP,2(x) = x+ 2 +x3
3ex
es una solución particular de y′′ − 2y′ + y = x+ 2xex.
Finalmente,
y(x) = yH(x) + yP (x) = C1ex + C2xe
x + x+ 2 +x3
3ex
es la solución general de y′′ − 2y′ + y = x+ 2xex.
31

ECUACIÓN DIFERENCIAL SOLUCIÓN GENERAL
de primer orden lineal homogénea
y′ + P (x)y = 0
y(x) = Ke−A(x)
donde A(x) es una primitiva de P (x)
de primer orden lineal no homogénea
y′ + P (x)y = Q(x)
y(x) = Ke−A(x) + e−A(x)B(x)
donde A(x) es una primitiva de P (x)y B(x) es una primitiva de Q(x)eA(x)
de primer orden de variables separables
y′ = Q(x)R(y)
Toda solución y(x) satisface
G(y) =∫Q(x)dx+ C
donde G es una primitiva de 1/R,∫Q(x)dx es una primitiva de Q,
y C es una constante real.
Soluciones de ecuaciones diferenciales de 1er orden
32

ECUACIÓN DIFERENCIAL DISCRIMINANTE SOLUCIÓN GENERAL
y′′ + ay′ + by = 0
∆ = a2 − 4b > 0
∆ = a2 − 4b = 0
∆ = a2 − 4b < 0
y(x) = C1eλ1x + C2e
λ2x
(λ1 y λ2 raíces deλ2 + aλ+ b = 0
)
y(x) = C1eλx + C2xe
λx
(λ raíz de
λ2 + aλ+ b = 0
)y(x) = C1e
αxcos(βx)
+ C2eαxsen(βx)
λ = α± βiraíces complejas deλ2 + aλ+ b = 0
Soluciones generales de ecuaciones diferenciales homogéneas de 2do orden
ECUACIÓN DIFERENCIAL PARTE NO HOMOGÉNEA SOLUCIÓN PARTICULARA PROPONER
y′′ + ay′ + by = R(x)
(con b 6= 0)
R(x) = P (x)(con P (x) un polinomio de grado n)
R(x) = P (x)ecx
(con P (x) un polinomio)
R(x) = P (x)cos(dx) +Q(x)sen(dx)(con P (x) y Q(x) polinomios)
yP (x) = anxn + · · ·+ a1x+ a0
yP (x) = u(x)ecx
yP (x) = u(x)cos(dx) + v(x)sen(dx)
Soluciones particulares de ecuaciones diferenciales no homogéneas de 2do orden
Escrito en LATEX por Marco A. Pérez.
Material consultado:
• Calculus Vol. 1, de Tom Apostol.• Notas de Eleonora Catsigeras.
Última actualización: 21 de Abril de 2020.
33