Contribuciones al Control de Plantas de Produción de Frío Mediante Energía Solar
239
TESIS DOCTORAL Contribuciones al Control de Plantas de Producci´on de Fr´ ıo Mediante Energ´ ıa Solar Doctoranda: Amparo N´ u˜ nez Reyes Director: Carlos Bord´ons Alba
-
Upload
marcus-americano-da-costa -
Category
Documents
-
view
248 -
download
11
description
Doctoral Tesis
Transcript of Contribuciones al Control de Plantas de Produción de Frío Mediante Energía Solar

TESIS DOCTORAL
Contribuciones al Control dePlantas de Produccion de Frıo
Mediante Energıa Solar
Doctoranda: Amparo Nunez Reyes
Director: Carlos Bordons Alba


TESIS DOCTORAL
Contribuciones al Control dePlantas de Produccion de Frıo
Mediante Energıa Solar
Amparo Nunez Reyes———————————————————————————


TESIS DOCTORAL
Contribuciones al Control dePlantas de Produccion de Frıo
Mediante Energıa Solar
por
Amparo Nunez Reyes
Ingeniera en Informaticapor la Escuela Tecnica Superior de Ingenierıa Informatica
de la Universidad de Sevilla
Tesis presentada en laEscuela Tecnica Superior de Ingenieros
de la Universidad de Sevilla
para la obtencion delGrado de Doctora por la Universidad de Sevilla
Sevilla, Marzo de 2007


TESIS DOCTORAL
Contribuciones al Control dePlantas de Produccion de Frıo
Mediante Energıa Solar
Doctoranda: Amparo Nunez Reyes
Director: Carlos Bordons Alba


A Fernandoy
A mis padres
POR TODO


No vale la pena andar por andares mejor caminar para ir creciendo
[ Chambao]


Agradecimientos
Agradecer es una forma de pagar las deudas que nunca podremos pagar deltodo. Las conclusiones de los anos dedicados a esta investigacion no son un meritosolitario ni la consecuencia de un unico compromiso personal, sino el resultado,como siempre, de un conjunto de circunstancias y personas que han permitidocon su generosidad que este trabajo salga adelante.
Sin duda una de estas personas imprescindibles ha sido en todo momento midirector de tesis, el profesor Carlos Bordons, al que le agradezco la confianza quedeposito en mı desde un principio. Con sus conocimientos y sus generosas dosisde cordialidad y companerismo ha sabido conducir la investigacion de una formaejemplar.
Este proyecto debe su desarrollo en gran medida a las posibilidades que habrindado el disfrute de dos becas predoctorales: la beca predoctoral de formacionde investigadores del Ministerio de Ciencia y Tecnologıa y la beca predoctoral parala cooperacion interuniversitaria con Brasil, al amparo del Convenio de Coopera-cion suscrito entre el Ministerio de Educacion, Cultura y Deporte y el Ministeriode Educacion de Brasil.
Gracias a la estancia en la Universidad Federal de Santa Catarina (Florianopo-lis) propiciada por el programa de intercambio Hispano-brasileno, tuve la oportu-nidad de trabajar codo a codo con el profesor Julio Elıas-Normey del Departamen-to de Automacao e Sistemas en un proyecto donde esta investigacion comenzo adefinirse y a dar sus primeros pasos. Sin duda todas las etapas cumplidas hastala finalizacion de la tesis han sido indispensables para obtener el resultado final.Agradezco por tanto al profesor Normey su colaboracion tanto como su hospita-lidad y la de su familia, con la que compartimos gratos momentos durante unosmeses inolvidables.
El apoyo de los companeros del Departamento de Ingenierıa de Sistemas yAutomatica, ha confirmado durante el trabajo la calidad profesional y el interespersonal de sus integrantes. Agradecer, pues, a su director, el profesor Francisco

Rodrıguez su disposicion para atender algunas consultas sobre la planta solar yel obsequio de uno de sus libros, que ha sido un inestimable material de consultadurante el desarrollo de la tesis.
Gracias, ciertamente, al profesor Manolo Ruiz por su dedicacion incondicional.Su companerismo y aliento constante han sido una fuente de motivacion, y susaportaciones desinteresadas un necesario apoyo al trabajo.
Dar las gracias, tambien, a los profesores Daniel Limon y Teo Alamo, doscompaneros que siempre estan dispuestos a escuchar, ofrecer su opinion y crearnuevas ideas. Ası como a Darine Zambrano, Tomas Fernandez, Juan AlbertoGarcıa y Marıa del Mar Garcıa, por su ayuda durante las interminables sesionesde pruebas en la planta solar.
Guardo un agradecimiento especial para aquellas personas que me han influidonotablemente a la hora de escoger un camino profesional. Una de ellas ha sidomi hermano Luis que desde siempre supo despertar y alentar mi curiosidad porel conocimiento; el me descubrio el mundo de la informatica. Gracias al profesorEduardo Fernandez y mi admiracion por su trabajo, tome la determinacion deadentrarme en el ambito de la automatica; el ha sabido tambien transmitirme supasion por la investigacion. Y por supuesto mi amiga y companera de estudios,Asun Zafra, que tuvo mucho que ver en la eleccion del camino por donde andoahora.
Durante el proceso de la tesis he tenido la suerte de coincidir (en congresosy cursos) con algunos profesores a los que admiro, como Ioan D. Landau, RobinDe Keyser y Cesar de Prada, que mostraron interes por mi trabajo; a ellos lesagradezco sus valiosos comentarios que sirvieron para depurar algunas de las ideasde la tesis y me ayudaron a confiar en mi investigacion.
Las deudas de gratitud no terminan aquı, quedan pendientes esas ayudas nocuantificables brindadas por varios miembros del departamento con su alientoy consejo y las muestras de interes recibidas durante la elaboracion de la tesispor familiares y amigos (ellos saben quienes son) que no han permitido que eldesanimo se instalara entre las horas de lecturas, ensayos y redacciones; unasdeudas que no esperan pago y que son de hecho impagables.

Indice general
Lista de tablas 1
Lista de figuras 2
Nomenclatura 10
1. Motivacion, objetivos y metodologıa 13
1.1. Motivacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.2. Objetivos y metodologıa . . . . . . . . . . . . . . . . . . . . . . . 15
1.3. Organizacion de la tesis . . . . . . . . . . . . . . . . . . . . . . . 17
2. Estado del arte 19
2.1. Control Predictivo Basado en Modelos . . . . . . . . . . . . . . . 19
2.1.1. Introduccion y conceptos . . . . . . . . . . . . . . . . . . . 19
2.1.2. Algoritmos de control predictivo . . . . . . . . . . . . . . . 23
2.1.3. Historia y evolucion del CPBM . . . . . . . . . . . . . . . 25
2.1.4. Control predictivo en la industria . . . . . . . . . . . . . . 29
i

ii INDICE GENERAL
2.2. Energıa solar y climatizacion . . . . . . . . . . . . . . . . . . . . . 30
2.2.1. Energıa solar y sistemas termicos solares . . . . . . . . . . 30
2.2.1.1. Energıa solar termica . . . . . . . . . . . . . . . . 30
2.2.2. Energıa solar y sistemas de refrigeracion solar . . . . . . . 32
2.2.2.1. Introduccion . . . . . . . . . . . . . . . . . . . . 32
2.2.2.2. La maquina de absorcion . . . . . . . . . . . . . 36
2.3. Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3. Estrategia de control y Algoritmo de Optimizacion del COP 41
3.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.2. Problema general de control . . . . . . . . . . . . . . . . . . . . . 44
3.2.1. Estrategia de control . . . . . . . . . . . . . . . . . . . . . 47
3.3. Algoritmo de optimizacion del COP . . . . . . . . . . . . . . . . . 49
3.3.1. Calculo del rendimiento del sistema . . . . . . . . . . . . . 49
3.3.2. Desarrollo del algoritmo . . . . . . . . . . . . . . . . . . . 55
3.4. Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4. Analisis de los modos de funcionamiento de una planta solar defrıo 59
4.1. Introduccion: modos de funcionamiento . . . . . . . . . . . . . . . 59
4.2. Modo 1. Sistema de energıa auxiliar y sistema de acumulacion . . 63
4.2.1. Estudio de caudales . . . . . . . . . . . . . . . . . . . . . . 65

INDICE GENERAL iii
4.2.2. Problema de control . . . . . . . . . . . . . . . . . . . . . 67
4.3. Modo 2. Sistema de energıa solar, sistema de acumulacion y sistemade energıa auxiliar . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.3.1. Estudio de caudales . . . . . . . . . . . . . . . . . . . . . . 71
4.3.2. Problema de control . . . . . . . . . . . . . . . . . . . . . 75
4.3.2.1. Modo de funcionamiento 2.1 . . . . . . . . . . . . 75
4.3.2.2. Modo de funcionamiento 2.2 . . . . . . . . . . . . 77
4.4. Modo 3. Sistema de energıa solar y sistema de acumulacion . . . . 78
4.4.1. Estudio de caudales . . . . . . . . . . . . . . . . . . . . . . 79
4.4.2. Problema de control . . . . . . . . . . . . . . . . . . . . . 87
4.4.2.1. Modo de funcionamiento 3.1 . . . . . . . . . . . . 87
4.4.2.2. Modo de funcionamiento 3.2 y 3.3 . . . . . . . . . 88
4.5. Modo 4. Sistema de energıa solar . . . . . . . . . . . . . . . . . . 91
4.5.1. Estudio de caudales . . . . . . . . . . . . . . . . . . . . . . 92
4.5.2. Problema de control . . . . . . . . . . . . . . . . . . . . . 94
4.5.2.1. Modo de funcionamiento 4.1 . . . . . . . . . . . . 94
4.5.2.2. Modo de funcionamiento 4.2 . . . . . . . . . . . . 95
4.6. Modo 5. Sistema de acumulacion . . . . . . . . . . . . . . . . . . 97
4.6.1. Estudio de caudales . . . . . . . . . . . . . . . . . . . . . . 97
4.6.2. Problema de control . . . . . . . . . . . . . . . . . . . . . 99
4.6.2.1. Modo de funcionamiento 5.1 . . . . . . . . . . . . 100

iv INDICE GENERAL
4.6.2.2. Modo de funcionamiento 5.2 . . . . . . . . . . . . 100
4.7. Resumen. Modos de funcionamiento y caudales . . . . . . . . . . 102
4.8. Diagrama de flujo . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
4.9. Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
5. Controlador predictivo adaptativo con identificacion simultanea107
5.1. Introduccion y motivacion. . . . . . . . . . . . . . . . . . . . . . . 107
5.1.1. Control dual . . . . . . . . . . . . . . . . . . . . . . . . . . 109
5.2. Ventana de identificacion inteligente . . . . . . . . . . . . . . . . . 113
5.2.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . 113
5.2.2. Desarrollo . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
5.3. GPC adaptativo con ventana de identificacion inteligente . . . . . 126
5.3.1. Resultados de simulacion y comparativa de controladores . 127
5.4. Controlador predictivo adaptativo con identificacion simultanea . 132
5.4.1. Desarrollo . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
5.4.1.1. Modelos de orden n . . . . . . . . . . . . . . . . 134
5.4.1.2. Modelos de primer orden . . . . . . . . . . . . . . 137
5.4.1.3. Problema de optimizacion . . . . . . . . . . . . . 139
5.4.2. Resultados de simulacion y comparativa de controladores . 140
5.5. Aplicacion real. Control de la temperatura del campo solar . . . . 144
5.5.1. Compensacion de perturbaciones. Control en adelanto . . . 145

INDICE GENERAL v
5.5.1.1. Introduccion . . . . . . . . . . . . . . . . . . . . 145
5.5.1.2. Controlador en adelanto en paralelo . . . . . . . 147
5.5.1.3. Controlador en adelanto en serie . . . . . . . . . 148
5.6. Resultados experimentales . . . . . . . . . . . . . . . . . . . . . . 149
5.7. Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
6. Controlador Predictivo Generalizado basado en el Predictor deSmith 153
6.1. Descripcion SPGPC . . . . . . . . . . . . . . . . . . . . . . . . . 153
6.2. Sintonizacion del SPGPC . . . . . . . . . . . . . . . . . . . . . . . 156
6.3. Aplicacion. Control de la temperatura del generador. . . . . . . . 159
6.3.1. Identificacion del modelo . . . . . . . . . . . . . . . . . . . 161
6.3.2. Experimentos reales . . . . . . . . . . . . . . . . . . . . . 162
6.4. Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
7. Resultados del control global de la planta de refrigeracion solar167
7.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
7.2. Resultados obtenidos . . . . . . . . . . . . . . . . . . . . . . . . . 168
7.3. Otros resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
7.4. Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
8. Conclusiones y trabajos futuros 185
8.1. Conclusiones y aportaciones . . . . . . . . . . . . . . . . . . . . . 185

vi INDICE GENERAL
8.2. Futuras lıneas de investigacion . . . . . . . . . . . . . . . . . . . . 188
A. Descripcion y modelo dinamico de la planta de produccion defrıo 189
A.1. Generalidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
A.2. Sistema de captacion . . . . . . . . . . . . . . . . . . . . . . . . . 190
A.3. Sistema de acumulacion . . . . . . . . . . . . . . . . . . . . . . . 192
A.4. Sistema de energıa auxiliar . . . . . . . . . . . . . . . . . . . . . . 196
A.5. Equipo de absorcion . . . . . . . . . . . . . . . . . . . . . . . . . 197
A.6. Sistema de evacuacion de calor . . . . . . . . . . . . . . . . . . . . 199
A.7. Simulador de Cargas . . . . . . . . . . . . . . . . . . . . . . . . . 200
A.8. Circuito Hidraulico . . . . . . . . . . . . . . . . . . . . . . . . . . 201
A.9. Sistema electrico e instrumentacion . . . . . . . . . . . . . . . . . 202
A.10.Sistema de Control . . . . . . . . . . . . . . . . . . . . . . . . . . 202
A.10.1.OPC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205
Bibliografıa 207

Indice de cuadros
1. Nomenclatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2. Nomenclatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4.1. Variables manipulables enteras . . . . . . . . . . . . . . . . . . . . 60
4.2. Valores de las variables manipulables discretas en los diferentesmodos de funcionamiento . . . . . . . . . . . . . . . . . . . . . . . 63
4.3. Modos de funcionamiento 2.1 y 2.2. . . . . . . . . . . . . . . . . . 70
4.4. Configuraciones de la planta solar en el modo de funcionamiento 3 79
4.5. Configuraciones de la planta solar en el modo de funcionamiento 4 92
4.6. Configuraciones de la planta solar en el modo de funcionamiento 5 97
4.7. Resumen modos de funcionamiento . . . . . . . . . . . . . . . . . 102
4.8. Caudales maximos y mınimos en litros por hora. . . . . . . . . . . 103
5.1. Resultados de la identificacion para datos de entrada sin filtrar yfiltrados mediante diferentes metodos. . . . . . . . . . . . . . . . . 121
5.2. Variables de sintonizacion del algoritmo ventana de identificacioninteligente. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
5.3. Simulacion I: Sintonizacion de parametros . . . . . . . . . . . . . 128
1

2 INDICE DE CUADROS
5.4. Simulacion I: gpc-vii vs gpc autoajustable . . . . . . . . . . . . 128
5.5. Simulacion II: Sintonizacion de parametros . . . . . . . . . . . . . 130
5.6. Simulacion II: gpc-vii vs gpc autoajustable . . . . . . . . . . . . 130
5.7. Simulacion III: Sintonizacion de parametros . . . . . . . . . . . . 132
5.8. Simulacion III : gpc-vii vs gpc autoajustable . . . . . . . . . . . 132
5.9. Simulacion I: Sintonizacion de parametros . . . . . . . . . . . . . 141
5.10. Simulacion I: Comparativa de los controladores: gpc autoajusta-ble, gpc-vii y gpcc . . . . . . . . . . . . . . . . . . . . . . . . . 141
5.11. Simulacion II: Sintonizacion de parametros . . . . . . . . . . . . . 142
5.12. Simulacion II: Comparativa de los controladores: gpc autoajusta-ble, gpc-vii y gpcc . . . . . . . . . . . . . . . . . . . . . . . . . 143
7.1. Balance de energıa . . . . . . . . . . . . . . . . . . . . . . . . . . 170
7.2. Experimento I. Errores cuadraticos medios. . . . . . . . . . . . . . 170
7.3. Balance energetico (kWh) . . . . . . . . . . . . . . . . . . . . . . 178
7.4. Coeficiente de comportamiento de la maquina de absorcion, efi-ciencia de colectores y coeficiente de comportamiento solar . . . . 180
7.5. Error cuadratico medio de los controladores gpcc y spgpc . . . . 180
7.6. Energıa del generador con el valor optimo de COP frente energıagenerador con un valor medio de COP . . . . . . . . . . . . . . . 181
7.7. Costes sistema de refrigeracion solar frente coste sistema de refri-geracion convencional (euros) . . . . . . . . . . . . . . . . . . . . 182

Indice de figuras
2.1. Estrategia del cpbm. . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.2. Esquema basico del cpbm. . . . . . . . . . . . . . . . . . . . . . . 22
2.3. Esquema planta de refrigeracion solar. . . . . . . . . . . . . . . . 33
2.4. Representacion temodinamica de una unidad de refrigeracion . . . 34
2.5. Esquema de maquina frigorıfica por absorcion . . . . . . . . . . . 39
3.1. Esquema de la planta solar. . . . . . . . . . . . . . . . . . . . . . 42
3.2. Radiacion solar y temperatura ambiente en epoca estival. . . . . . 43
3.3. Simulador de cargas. . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.4. Estrategia de control. . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.5. Estrategia de control. . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.6. Curva de rendimiento de la maquina de absorcion para Tcond = 24 51
3.7. Curva de rendimiento de la maquina de absorcion para Tcond = 29,5 52
3.8. Curva de rendimiento de la maquina de absorcion para Tcond = 31 53
3.9. Curva de rendimiento de colectores solares. . . . . . . . . . . . . . 54
3

4 INDICE DE FIGURAS
3.10. Particion del sistema de refrigeracion solar en diferentes subsiste-mas para el calculo del balance energetico . . . . . . . . . . . . . 55
4.1. Esquema de la planta . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.2. Comportamiento de la planta real para un caudal inferior a 2000 l/h 62
4.3. Modo de funcionamiento 1 . . . . . . . . . . . . . . . . . . . . . . 65
4.4. Modo 1: caudales generador, caldera y tanques . . . . . . . . . . . 66
4.5. Modo 1: caudal de colectores . . . . . . . . . . . . . . . . . . . . . 67
4.6. Estrategia de control. Modo de funcionamiento 1 . . . . . . . . . 69
4.7. Modo de funcionamiento 2.1 . . . . . . . . . . . . . . . . . . . . . 71
4.8. Relacion entre caudales: generador, caldera y acumuladores. Modo2.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.9. Relacion entre caudal en colectores solares y la velocidad de labomba B1. Modo 2.1 . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.10. Modo de funcionamiento 2.2 . . . . . . . . . . . . . . . . . . . . . 73
4.11. Modo 2.2: caudal de generador . . . . . . . . . . . . . . . . . . . . 74
4.12. Modo 2.2: caudal de caldera . . . . . . . . . . . . . . . . . . . . . 74
4.13. Modo 2.2: caudal de colectores . . . . . . . . . . . . . . . . . . . . 75
4.14. Modo 2.2: caudal de tanques . . . . . . . . . . . . . . . . . . . . . 75
4.15. Estrategia de control. Modo de funcionamiento 2.1 . . . . . . . . . 76
4.16. Detalle del diagrama de flujo para la seleccion de modo de funcio-namento 2.1 y 2.2 . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4.17. Modo de funcionamiento 3.1 . . . . . . . . . . . . . . . . . . . . . 80

INDICE DE FIGURAS 5
4.18. Caudales modo 3.1 . . . . . . . . . . . . . . . . . . . . . . . . . . 80
4.19. Modo de funcionamiento 3.2 . . . . . . . . . . . . . . . . . . . . . 81
4.20. Caudales modo 3.2 . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4.21. Modo de funcionamiento 3.3 . . . . . . . . . . . . . . . . . . . . . 82
4.22. Caudales modo 3.3 . . . . . . . . . . . . . . . . . . . . . . . . . . 82
4.23. Experimento I, caudal de tanques en el modo 3.3 . . . . . . . . . 84
4.24. Experimento II, caudal de tanques en el modo 3.3 . . . . . . . . . 84
4.25. Modo de funcionamiento 3.4 . . . . . . . . . . . . . . . . . . . . . 85
4.26. Relacion entre el caudal de colectores solares y B1. Modo 3.4 . . . 85
4.27. Experimento I, caudal de tanques en el modo 3.4 . . . . . . . . . 86
4.28. Experimento II, caudal de tanques en el modo 3.4 . . . . . . . . . 87
4.29. Estrategia de control. Modo de funcionamiento 3.1. . . . . . . . . 88
4.30. Estrategia de control. Modo de funcionamiento 3.2 y 3.3 . . . . . 89
4.31. Caudal modo 3.2 versus B1 y Vm3 . . . . . . . . . . . . . . . . . 90
4.32. Diagrama de flujo parcial para la seleccion de modos de funciona-miento 3.1, 3.2 y 3.3 . . . . . . . . . . . . . . . . . . . . . . . . . 91
4.33. Modo de funcionamiento 4.1 . . . . . . . . . . . . . . . . . . . . . 93
4.34. Caudales en modo de funcionamiento 4.1 . . . . . . . . . . . . . . 94
4.35. Modo de funcionamiento 4.2 . . . . . . . . . . . . . . . . . . . . . 94
4.36. Caudales en modo de funcionamiento 4.2 . . . . . . . . . . . . . . 95
4.37. Estrategia de control. Modo de funcionamiento 4.1 . . . . . . . . . 96

6 INDICE DE FIGURAS
4.38. Estrategia de control. Modo de funcionamiento 4.2 . . . . . . . . . 96
4.39. Modo de funcionamiento 5.1 . . . . . . . . . . . . . . . . . . . . . 98
4.40. Modo 5.1. Caudal del generador . . . . . . . . . . . . . . . . . . . 98
4.41. Modo de funcionamiento 5.2 . . . . . . . . . . . . . . . . . . . . . 99
4.42. Modo 5.2. Caudal del generador . . . . . . . . . . . . . . . . . . . 100
4.43. Estrategia de control. Modo de funcionamiento 5.1 . . . . . . . . . 101
4.44. Estrategia de control. Modo de funcionamiento 5.2 . . . . . . . . . 101
4.45. Diagrama de flujo, algoritmo de seleccion de los modos de funcio-namiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
5.1. Algoritmo ventana de identificacion inteligente. . . . . . . . . . . 118
5.2. Trayectorias de la entrada (lınea continua) y la salida (lınea a tra-zos) de G(s) en simulacion. . . . . . . . . . . . . . . . . . . . . . . 119
5.3. Salida muestreada ym(t) afectada por errores de medida. . . . . . 120
5.4. Salida original del sistema simulado y, salida muestreada y conta-minada por ruido y falsas medidas ym y tres versiones filtradas dela misma. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
5.5. Proyeccion de s(t+1) frente a s(t) para las senales s = ym (puntosverdes) y s = yf3 (puntos negros). . . . . . . . . . . . . . . . . . . 122
5.6. Diferencia entre ventana de identificacion y conjunto ejemplar . . 125
5.7. Simulacion I (5). Proyeccion de y(t + 1) frente y(t) de las senales:salida simulada (y), salida simulada filtrada (yf ) y ejemplares uti-lizados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
5.8. Simulacion II. Valores reales y estimados de los parametros delmodelo mediante gpc-vii y gpc autoajustable . . . . . . . . . . . 131

INDICE DE FIGURAS 7
5.9. Simulacion III. Valores reales y estimados de los parametros delmodelo mediante gpc-vii y gpc auto autoajustable . . . . . . . . 133
5.10. Simulacion III (5). Proyeccion de y(t + 1) frente y(t) . . . . . . . 133
5.11. Simulacion I. Valores reales y estimados de los parametros del mo-delo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
5.12. Simulacion II. Valores reales y estimados de los parametros delmodelo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
5.13. Esquema basico del control en adelanto . . . . . . . . . . . . . . . 146
5.14. Temperatura de salida de colectores real versus temperatura desalida de colectores modelada . . . . . . . . . . . . . . . . . . . . 147
5.15. Controlador en adelanto en paralelo . . . . . . . . . . . . . . . . . 148
5.16. Controlador en adelanto en serie . . . . . . . . . . . . . . . . . . . 148
5.17. Aplicacion I del controlador gpcc a la planta solar . . . . . . . . 150
6.1. Estructura del controlador spgpc. . . . . . . . . . . . . . . . . . . 157
6.2. Ir para diferentes valores de λ . . . . . . . . . . . . . . . . . . . . 157
6.3. Ir para diferentes valores de β. . . . . . . . . . . . . . . . . . . . . 158
6.4. Error de modelado δP . . . . . . . . . . . . . . . . . . . . . . . . 159
6.5. Sintonizacion de Ir para diferentes valores de δP . . . . . . . . . . 160
6.6. spgpc sin considerar perturbaciones medibles. . . . . . . . . . . . 161
6.7. Temperatura del generador. Senal real y modelada . . . . . . . . . 163
6.8. Experimento I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
6.9. Experimento II . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165

8 INDICE DE FIGURAS
6.10. Experimento III . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
7.1. Experimento I. Radiacion solar y temperatura ambiente 14/10/06 169
7.2. Modos de funcionamiento activos del experimento I . . . . . . . . 170
7.3. Control demanda de frıo 14/10/06 . . . . . . . . . . . . . . . . . . 171
7.4. Experimento I. Modo de funcionamiento 1 y 2.1. (spgpc) . . . . . 172
7.5. Experimento I. Modos de funcionamiento 1 y 2.1 . . . . . . . . . 173
7.6. Experimento I. Modos de funcionamiento 1 y 2.1 (gpcc) . . . . . 173
7.7. Experimento I. Modo de funcionamiento 3.3. (Controlador de gamapartida) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
7.8. Experimento I. Modo de funcionamiento 4.2. (gpcc) . . . . . . . 175
7.9. Experimento I. Modo de funcionamiento 2.2 (spgpc) . . . . . . . 176
7.10. Experimento I. Modo de funcionamiento 2.2. (gpcc) . . . . . . . 177
7.11. Experimento I. Modos de funcionamiento 3.2 y 5.2 . . . . . . . . . 177
7.12. Radiacion solar y temperatura ambiente. Dıa 10/10/06 . . . . . . 179
7.13. Radiacion solar y temperatura ambiente. Dıa 11/10/06 . . . . . . 179
7.14. Comparativa de energıa termica . . . . . . . . . . . . . . . . . . . 181
7.15. Coste sistema de refrigeracion convencional frente coste de refrige-racion solar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
A.1. Esquema de principio de la instalacion . . . . . . . . . . . . . . . 191
A.2. Sistema de captacion . . . . . . . . . . . . . . . . . . . . . . . . . 192
A.3. Sistema de acumulacion . . . . . . . . . . . . . . . . . . . . . . . 193

INDICE DE FIGURAS 9
A.4. Deposito de acumulacion estratificado . . . . . . . . . . . . . . . . 194
A.5. Flujo entre nodos . . . . . . . . . . . . . . . . . . . . . . . . . . . 194
A.6. Flujos de entrada y salida del acumulador . . . . . . . . . . . . . 195
A.7. Sistema de energıa auxiliar . . . . . . . . . . . . . . . . . . . . . . 196
A.8. Equipo de absorcion . . . . . . . . . . . . . . . . . . . . . . . . . 198
A.9. Sistema de evacuacion de calor . . . . . . . . . . . . . . . . . . . . 199
A.10.Esquema de control distribuido . . . . . . . . . . . . . . . . . . . 203
A.11.Sinoptico de la planta . . . . . . . . . . . . . . . . . . . . . . . . . 204
A.12.Esquema general . . . . . . . . . . . . . . . . . . . . . . . . . . . 206

10 INDICE DE FIGURAS

Nomenclatura
Nombre Descripcion UnidadesIrr Radiacion solar W/m2
T Temperatura C
Q Potencia kWm Caudal masico Kg/sTamb T a ambiente C
Cuadro 1: Nomenclatura
Nombre Descripcionc Colectoresev Evaporadorcond Condensadorge Generadorac Acumuladorese Entradas Salida
Cuadro 2: Nomenclatura
11

12 INDICE DE FIGURAS

Capıtulo 1
Motivacion, objetivos ymetodologıa
A lo largo de este capıtulo se presentan las ideas que motivan el desarrollo dela tesis la cual se enmarca dentro del campo de plantas solares de produccion defrıo, ası como los objetivos que se pretenden alcanzar con la misma. En la ultimaparte del capıtulo, se presenta la organizacion de la tesis mostrando, de formabreve, el contenido de los capıtulos que la componen.
1.1. Motivacion
Los sistemas convencionales para la refrigeracion y calefaccion de un edificioconsumen gran cantidad de energıa producida por la combustion de carburantesfosiles. Esto da lugar a gases de efecto invernadero que son emitidos a la atmosferay tienen consecuencias serias sobre el calentamiento global.
La Conferencia de Naciones Unidas sobre el Medio Ambiente y el Desarro-llo, tambien conocida como la Cumbre de la Tierra, fue una cumbre interna-cional que tuvo lugar en Rıo de Janeiro del 3 de junio al 14 de junio de 1992(United Nations 1992). Fue una conferencia sin precedentes en el ambito de lasNaciones Unidas, tanto en tamano como en alcance de sus motivos. El principallogro de la Conferencia fue el acuerdo sobre la Convencion Marco de las NacionesUnidas sobre el Cambio Climatico, que mas tarde llevarıa al Protocolo de Kioto(United Nations 1997) sobre el cambio climatico.
13

14 1.1. Motivacion
El objetivo del Protocolo de Kioto, el unico mecanismo internacional paraempezar a hacer frente al cambio climatico y minimizar sus impactos, consiste enconseguir reducir un 5.1 % las emisiones de gases de efecto invernadero globalessobre los niveles de 1990 para el periodo 2008-2012.
Contiene objetivos legalmente obligatorios para que los paıses industrializadosreduzcan las emisiones de los 6 gases de efecto invernadero de origen humano comodioxido de carbono (CO2), metano (CH4) y oxido nitroso (N2O), ademas detres gases industriales fluorados: hidrofluorocarbonos (HFC), perfluorocarbonos(PFC) y hexafluoruro de azufre (SF6).
El compromiso de Espana con respecto al Protocolo de Kioto fue no aumentarlas emisiones de gases de efecto invernadero mas del 15 % sobre los niveles de 1990.Pero en 2005 se llego a superar dicho lımite llegando incluso al 53 %.
Los clorofluorocarbonados (cfcs) se han utilizados como lıquidos de fun-cionamiento en los sistemas de aire acondicionado convencionales durante masde 60 anos. Sin embargo, ya se sabe, que estos refrigerantes destruyen la capade ozono y contribuyen al calentamiento global (McCulloch & Lindley 2007),(AFEAS 2005). La preocupacion del ambiente por cfcs, hcfc y algunos de sussustitutos (Parlamento Europeo 2000), ha incitado la investigacion para identifi-car nuevas tecnologıas que proporcionan una alternativa a los sistemas conven-cionales de la compresion del vapor.
Existen diferentes sistemas de refrigeracion disponibles para la refrigeraciony el aire acondicionado de los edificios. Dichos sistemas se pueden clasificar entres categorıas principales segun el tipo de energıa utilizada para su operacion:sistemas electricos, sistemas termicos y sistemas hıbridos (Afonso 2005). Mientrasque para la primera categorıa la energıa utilizada es la electricidad para la se-gunda categorıa el sistema se acciona mediante cualquier tipo de energıa termica.La tercera categorıa esta compuesta de varias formas de energıa que se utilizanconjuntamente para incrementar la eficiencia del sistema.
Recientemente, el segundo grupo (sistemas termicos) han suscitado un interescreciente tanto desde la investigacion como desde la industria comercial. Esto sedebe, principalmente al hecho de que los sistemas termicos provocan un menorefecto invernadero, las emisiones de CO2 al ambiente son inferiores y contribuyena paliar la destruccion de la capa de ozono en comparacion con los sistemas derefrigeracion electricos que usan refrigerantes sinteticos y electricidad como fuentede energıa.
El Instituto Internacional de la Refrigeracion ha estimado que aproximada-

Capıtulo 1. Motivacion, objetivos y metodologıa 15
mente el 15 % de toda la electricidad producida en el mundo se utiliza para larefrigeracion y en general para los procesos de aire acondicionado de diferentestipos (Lucas 1988).
Esta claro que la lucha contra el cambio climatico supone hoy en dıa el mayorimpulso a las energıas renovables y las tecnologıas de mayor eficiencia energetica(Ruız 2006).
Po otra parte, en la literatura se conocen muy pocas publicaciones sobre es-trategias de control que permitan un control total de los sistemas de refrigeracionsolar (Kohlenbach 2006).
Sin embargo, se han llevado a cabo numerosos estudios sobre el control de lossistemas que componen el proceso completo, por una parte el control de sistemastermicos solares teniendo en cuenta la fraccion solar y el consumo de potencia ypor otra parte el control interno de la maquina de absorcion (Lazzarin 1980).
Una posible razon de la carencia de investigaciones sobre el control total, po-drıa ser debido a las pocas instalaciones existentes. En Europa apenas existen me-dio centenar de instalaciones de refrigeracion solar (Balaras, Grossman, Henning,Ferreira, Podesser, Wang & Wiemken 2007) que ademas trabajan diariamentecon unas condiciones fijas de operacion y el rango de las variaciones de los posi-ble parametros del control es muy pequeno (Li & Sumathy 2001), (Kohne, Oertel& Zunft 1996a). Esto provoca la pobreza de las investigaciones experimentalesque en principio se necesitan para encontrar una estrategia de control aceptable.Ademas el escaso numero de modelos disponibles para la simulacion de estos sis-temas (Casals 2006), (Fan, Luo & Souyri In Press 2006), (Xu, Zhang, Xu, Liang& Du 2007), (Butz, Beckman & Duffie 1974) limitan aun mas las aproximacionesy estudios teoricos del proceso.
Por lo tanto se pone en evidencia la justificacion de la investigacion de nuevastecnologıas que aporten ideas innovadoras y eficientes para el control de sistemasde refrigeracion solar.
1.2. Objetivos y metodologıa
El objetivo fundamental de la tesis consiste en realizar una estrategia de con-trol que permita controlar una planta solar de frıo. Dicha estrategia de control sedisena con la finalidad de regular la potencia frigorıfica dando respuesta a la de-

16 1.2. Objetivos y metodologıa
manda de frıo a lo largo del dıa con el mayor rendimiento posible de la instalacion.Ademas tambien se desea dar prioridad al uso de la energıa solar ası como apro-vechar la energıa sobrante en el sistema de acumulacion y economizar el consumode energıa auxiliar.
La metodologıa que se propone en la tesis para lograr alcanzar los objetivosse puede dividir en tres bloques. Dicha metodologıa es extensible para el controlde cualquier planta de produccion de frıo.
Estudio del problema de control El primer bloque consiste en el estudio dela problematica de control desde un punto de vista general. Dependiendodel tipo de instalacion (variables de las que se dispone, interconexion de losdiferentes componentes, limitaciones, etc.) se podra enfocar el control deuna forma u otra.
Configuraciones de la planta El segundo bloque trata del estudio exhaustivode las diferentes configuraciones de la planta o lo que es lo mismo, de losmodos de funcionamiento en los que la planta puede operar. Se estudia elproblema de control para cada una de las configuraciones y se propone lamejor estrategia de control de cada modo.
Aplicacion de tecnicas de control avanzadas En el ultimo bloque se estu-dia, dentro de las tecnicas de control existentes, cuales son las mejores paraser aplicadas y lograr alcanzar los objetivos, o en su caso se proponen nuevastecnicas que se adaptan mejor a los problemas en concreto de la planta.
En la tesis se ha seguido la anterior metodologıa y han surgido los siguientesalgoritmos desglosados a continuacion:
1 Desarrollo de un algoritmo para calcular el punto de operacion optimo conel objetivo de alcanzar el mayor rendimiento de la planta (capıtulo 3).
2 Desarrollo de un algoritmo para seleccionar los modos de funcionamiento yeleccion de controladores (capıtulo 4).
3 Desarrollo de controladores avanzados dentro del marco del control predic-tivo basado en modelos (capıtulo 5 y 6).
4 Aplicacion de la estrategia de control a la planta solar de frıo (capıtulo 7).

Capıtulo 1. Motivacion, objetivos y metodologıa 17
1.3. Organizacion de la tesis
A continuacion, para que el lector tenga una vision global del trabajo, sepresentan los contenidos de los capıtulos de la tesis y los objetivos que se persiguenen cada uno de ellos:
Capıtulo 2 Este capıtulo presenta, por una parte, los fundamentos del controlpredictivo basado en modelos (cpbm), ası como una evolucion historica, losdiferentes tipos de controladores que se engloban dentro de la familia cpbmy su aplicacion en el entorno industrial. Por otra parte se presenta un estadodel arte sobre el control de plantas solares de produccion frıo.
Capıtulo 3 En este capıtulo se propone un nuevo enfoque del control de la plan-ta de produccion de frıo, se describe la estrategia de control y se exponeel algoritmo desarrollado para el control de la potencia frigorıfica que ma-ximiza el rendimiento de la maquina de absorcion, denominado: Algoritmode Optimizacion del cop.
Capıtulo 4 En esta seccion se ha llevado a cabo un analisis detallado de laplanta solar de frıo, donde se estudian las diferentes configuraciones que estapuede adoptar, definiendo ası los modos de funcionamiento. Se desarrollaun algoritmo para la seleccion de los modos de funcionamiento y tambiense definen las diferentes estrategias de control que se van a utilizar en cadamodo.
Capıtulo 5 En este capıtulo se propone una nueva alternativa del controla-dor predictivo adaptativo, denominada, Control Predictivo Adaptativo conIdentificacion Simultanea (gpcc), el cual integra en una misma funcion decoste el calculo de la accion de control y la estimacion de parametros, deforma que cumple las caracterısticas de los controladores duales. El contro-lador incluye un novedoso metodo de identificacion, denominado Ventanade Identificacion Inteligente. Dicho metodo garantiza riqueza dinamica enlos datos produciendo una buena y fiable identificacion del sistema.
Capıtulo 6 Este capıtulo incluye el desarrollo del controlador Predictivo Gene-ralizado basado en el Predictor de Smith (spgpc) y la aplicacion del mismoen la planta real. Se utiliza para controlar la temperatura del generador dela maquina de absorcion teniendo en cuenta perturbaciones medibles, incer-tidumbres en el retardo y restricciones en la entrada y salida del proceso.
Capıtulo 7 En este apartado se realiza el control integral de la planta real. Sedestaca el comportamiento de los controladores avanzados propuestos en latesis y la consecucion de los objetivos previstos.

18 1.3. Organizacion de la tesis
Capıtulo 8 Y por ultimo se presentan las conclusiones mas importantes de latesis destacando las aportaciones, finalizando con las futuras lıneas de in-vestigacion.

Capıtulo 2
Estado del arte
Este capıtulo se divide en dos partes, en la primera se presenta una visionglobal del control predictivo basado en modelos y en la segunda se expone elestado del arte de los sistemas de refrigeracion mediante energıa solar.
2.1. Control Predictivo Basado en Modelos
2.1.1. Introduccion y conceptos
(cpbm)1 engloba un amplio abanico de metodos de control desarrollados entorno a ciertas ideas comunes e integra diversas disciplinas como control optimo,control estocastico, control de procesos con tiempos muertos, control multivaria-ble o control con restricciones. Los conceptos que comparten toda la familia decontroladores predictivos son basicamente (Camacho & Bordons 2004):
Uso explıcito de un modelo para predecir la salida del proceso en futurosinstantes de tiempo (horizonte).
Calculo de las senales de accion de control minimizando una cierta funcionobjetivo.
Estrategia deslizante, es decir, en cada instante el horizonte es desplazadohacia el futuro, lo que implica aplicar la primera senal de control en ca-
1En ingles, Model (Based) Predictive Control (mbpc o mpc)
19

20 2.1. Control Predictivo Basado en Modelos
da instante y desechar el resto, repitiendo el calculo en cada instante demuestreo.
Las principales diferencias entre los distintos algoritmos cpbm consisten en elmodelo que utilizan para representar el proceso y los ruidos y en la funcion decoste a minimizar.
El cpbm presenta una serie de ventajas frente a otros metodos, entre las quedestacan las siguientes:
Puede ser aplicado por personal sin un conocimiento profundo de control,puesto que los conceptos resultan muy intuitivos y la sintonizacion es facilde realizar.
Se puede aplicar para controlar una gran variedad de procesos, desde aque-llos con dinamica relativamente simple hasta aquellos mas complejos inclu-yendo sistemas con grandes retardos, de fase no mınima o inestables.
Es facil extender su diseno para casos multivariables.
Se puede incluir facilmente el control por adelanto (feedforward) para com-pensar las perturbaciones medibles.
Es posible extender el diseno del controlador para tratar restricciones delproceso sistematicamente.
Es una metodologıa completamente abierta basada en algunos principiosbasicos que permite futuras extensiones.
Como es logico, tiene tambien sus inconvenientes. El principal es que, aunquesu implementacion no es compleja, resulta mas difıcil que la de los clasicos con-troladores pid. Si la dinamica del proceso no cambia y no existen restricciones,la mayor parte de los calculos se puede realizar fuera de lınea y el controladorresultante es simple, pudiendose aplicar a procesos de dinamicas rapidas; en casocontrario, los requisitos de calculo son mucho mayores. Aunque hay que decir quedebido a la potencia de los computadores actuales esto no es realmente una dificul-tad insalvable. La mayor dificultad que presenta para su aplicacion es la necesidadde un modelo apropiado del proceso cuya obtencion requiere unos conocimientosbasicos de control. El control predictivo ha demostrado ser en la practica unaestrategia razonable de control y ha sido aplicado con exito a numerosos procesosindustriales, como veremos mas adelante.

Capıtulo 2. Estado del arte 21
La metodologıa de todos los controladores pertenecientes a la familia cpbmse caracteriza por la siguiente estrategia, representada en la siguiente figura 2.1:
Figura 2.1: Estrategia del cpbm.
Las salidas futuras para un horizonte determinado N , llamado horizonte deprediccion, se predicen cada instante t utilizando el modelo del proceso. Estaspredicciones de la salida y(t + k|t) para k = 1 . . . N dependen de los valoresconocidos hasta el instante t (entradas y salidas conocidas) y de las senales decontrol u(t + k|t), k = 0 . . . N , que han de ser calculadas y enviadas al sistema.
La secuencia de senales de control futuras se calcula minimizando un criteriopara mantener al proceso lo mas cerca posible de la trayectoria de referenciaw(t + k). Este criterio toma normalmente la forma de una funcion cuadratica delerror entre la salida predicha y la trayectoria de referencias futuras. En la mayorparte de los casos se incluye tambien el esfuerzo de control dentro de la funcionobjetivo. La solucion explıcita se puede obtener cuando el criterio es cuadraticoy el modelo lineal; en caso contrario se ha de utilizar un metodo numerico parabuscar la solucion.
La senal de control u(t + j|t) se envıa al proceso mientras que el resto de lassenales calculadas no se consideran, ya que en el instante siguiente de muestreoy(t+1) es ya conocida y los pasos anteriores se repiten con este nuevo valor. Por loque u(t+1|t+1) se calcula con informacion diferente y en principio sera tambiendiferente de u(t + 1|t).
La figura 2.2 muestra la estructura basica necesaria para inplementar el controlpredictivo. Se usa un modelo para predecir la evolucion de la salida o estado del

22 2.1. Control Predictivo Basado en Modelos
proceso a partir de las senales de entrada y salidas conocidas. La acciones decontrol futuras se calculan con el optimizador, que considera la funcion del costey las posibles restricciones. El modelo del proceso juega, en consecuencia, un
Figura 2.2: Esquema basico del cpbm.
papel decisivo en el controlador. El modelo elegido debe ser capaz de capturarla dinamica del proceso para predecir de forma precisa la evolucion del sistema.Al mismo tiempo, debe ser suficientemente simple de implementar y entender.Las distintas metodologıas del control predictivo difieren fundamentalmente enel tipo de modelo utilizado.
Notese que la estrategia de control predictivo es muy similar a la estrategia quese utiliza cuando se conduce un automovil. El conductor conoce la trayectoria dereferencia deseada para un horizonte de control finito. Tomando en consideracionlas caracterısticas del automovil (modelo mental del automovil) decide que accionde control tomar (acelerador, frenos, volante, marchas) para seguir la trayectoriadeseada. Solo la primera accion de control de la secuencia calculada mentalmentees aplicada por el conductor en cada instante y el procedimiento se repite enlos sucesivos instantes utilizando el concepto de horizonte deslizante. Cuandose utiliza un esquema de control clasico como pid se utilizan solo las senalespasadas. Esta forma de conducir el automovil sera como conducir utilizando elespejo retrovisor. Esta analogıa no es totalmente justa con los pids, porque elcontrol predictivo utiliza mas informacion (trayectoria de referencia). Aunque sise le proporciona al pid como referencia un punto en la trayectoria futura ladiferencia entre ambas estrategias de control no parecerıa tan abismal.

Capıtulo 2. Estado del arte 23
2.1.2. Algoritmos de control predictivo
A continuacion se describen las principales caracterısticas de los algoritmosmas populares de control predictivo.
1. Control con Matriz Dinamica o Dynamic Matrix Control (dmc) (Cutler& Ramaker 1980). Posteriormente se desarrollo el Quadratic dmc (qdmc)como extension del dmc al caso con restricciones (Garcıa & Morshedi 1986).
PredictorEl dmc usa un modelo del proceso basado en la respuesta ante escaloneligiendo solo los N primeros terminos, por lo que se asume que el procesodebe ser estable.
Funcion de costePuede considerar solo errores en la prediccion futura o tambien incluir lapenalizacion del esfuerzo de control
OptimizacionSi se contemplan restricciones, la optimizacion se lleva cabo de una formanumerica y en cada perıodo de muestreo aplicando solo la primera accionde control siguiendo la filosofıa del horizonte deslizante.
Las principales desventajas del algoritmo es que no se puede usar en sistemasinestables y que la dimension del modelo suele ser grande. Y como ventajaes que es muy facil la inclusion de restricciones.
2. Control Algorıtmico basado en Modelos o Model Algorithmic Control mac(Richalet, Rault, Testud & Papon 1978). Tambien denominado, ControlPredictivo Heurıstico basado en Modelos o Model Predictive heuristic Con-trol mpch, el cual se comercializa bajo el nombre Identification Commandidcom.
PredictorEl controlador mac utiliza un modelo basado en la respuesta impulsionalvalido solo para sistemas estables. No utiliza el concepto de horizonte decontrol Nu. El numero de acciones de control calculadas equivalen al ho-rizonte de prediccion N . Las perturbaciones se consideran igual que en eldmc, pero ademas se pueden modelar como un sistema de primer orden.
Funcion de costeEs similar a la del dmc pero se hace uso de una trayectoria de referenciautilizando para ello un filtro de primer orden.
OptimizacionSi se contemplan restricciones es similar a la optimizacion del dmc

24 2.1. Control Predictivo Basado en Modelos
3. Control Predictivo Generalizado o Generalized Predictive Control gpc(Clarke, Mohtadi & P.S.Tuffs 1987a).
PredictorLas predicciones se basan en el modelo carima, el cual modela la pertur-bacion no medible, con el polinomio T (z−1), que como es difıcil de conocerse usa como parametro de diseno. La obtencion de la prediccion optima selleva a cabo mediante una ecuacion diofantica.
Funcion de costeLa funcion de coste penaliza los errores futuros y el esfuerzo de control conlos parametros δ y λ, respectivamente, a los cuales se les puede asignar unvalor constante o variable. OptimizacionEs similar a la del dmc.
4. Control Predictivo Funcional Predictive Functional pfc (Richalet, Ata-Doss, Arber, Kuntze, Jacubash & Schill 1987).
PredictorEl controlador pfc usa un modelo basado en el espacio de estados y sirvetanto para sistemas lineales inestables como no lineales.
Funcion de costeSu funcion de coste es similar a la del mac pero solo se considera un conjuntode puntos del horizonte de prediccion y no todo el horizonte completo, esteconcepto se denomina puntos coincidentes. El problema de optimizacionresulta mas sencillo.
El controlador parametriza la accion de control utilizando funciones basepolinomiales, permitiendo la consideracion de perfiles de la entrada relati-vamente complejos, pudiendo seguir referencias polinomiales sin retraso.
5. Controlador Autosintonizado o Extended Prediction Self Adaptive Controlepsac (Keyser & Cuawenberghe 1985).
PredictorEl controlador epsac utiliza un modelo basado en funcion de transferenciaque incluye la perturbacion y que se puede extender para que incluya unaperturbacion medible (efecto feedforward).
Funcion de costeLa funcion de coste considera un horizonte de control de control igual a uno(Nu = 1), es decir, solo se calcula una accion de control.
OptimizacionAl calcular solo una accion de control, el problema de optimizacion quedamuy simplificado de forma que la ley de control se obtiene analıticamente.
6. Control Adaptativo de Horizonte Extendido o Extended Horizon AdaptiveControl ehac (Ydstie 1984).

Capıtulo 2. Estado del arte 25
PredictorEl predicto utiliza unmodelo en funcion de transferencia pero no incluyeningun modelo de las perturbaciones.
Funcion de costeEl horizonte de control y de prediccion son iguales a uno (Nu = N = 1) peroreferidos al instante t + N . Por lo que no se puede considerar trayectoriade referncia, pues solo se considera el error en el instante t + N , y por otraparte no se puede penalizar el esfuerzo de control en cada instante, por loque sera imposible eliminar ciertas frecuencias de la respuesta.
OptimizacionLa ley de control tambien se puede obtener analıticamente.
Otros algoritmos de control predictivo son el control autosintonizado basadoen predictores (predictor-Based Self-Tuning) (Peterka 1984), el control adaptati-vo multivariable multipaso (Multistep Multivariable Adaptive Control) musmar(Greco, Menga, Mosca & Zappa 1984). o los controladores predictivos con estabili-dad garantizada crhp (Clarke & Scattolini 1991) siorhc (Lemos & Zhang 1990).
2.1.3. Historia y evolucion del CPBM
La idea del cpbm ya se vislumbro en los anos 60 antes de que el cpbm seconvirtiera en una de las estrategias de control avanzado mas utilizadas en elcontrol de procesos. Los conceptos teoricos iniciales que pueden asociarse al con-trol predictivo se basan en los trabajos realizados en control optimo. Utilizandoun modelo discreto lineal en espacio de estados se calcula la ley de control mi-nimizando una funcion cuadratica de los estados y las acciones de control (re-gulator lineal cuadratico(lqr)). Al fijar un ındice infinito se podrıa obtener uncontrolador consistente en una realimentacion del estado (Lemos & Mosca 1985),(Mosca 1995a). Debido a las capacidades limitadas en los ordenadores y al rapidomuestreo de los procesos para los que el lqr fue desarrollado, por ejemplo en laindustria aeroespacial, el esfuerzo se desvio hacia la obtencion de controladoresque evitasen realizar la optimizacion en lınea.
El cpbm fue desarrollado primero en la industria, bajo varios acronimos yrecetas propias, tratando de resolver los inconvenientes planteados en el lqr, pre-viamente mencionados, y mucho antes de disponer de un minucioso entendimientode las propiedades teoricas de lo que hoy se entiende como control predictivo. elconcepto de horizonte deslizante, una de las ideas centradas del control predicti-vo, fue propuesto en (Propoi 1963). El interes de los investigadores por el cpbm

26 2.1. Control Predictivo Basado en Modelos
crecio a mitad de los anos 80, a raız de unas jornadas organizadas por la empresapetroquımica Shell (Prett & Morari 1987). La industria contribuyo decisivamenteen el desarrollo de un control optimo aplicable, apareciendo los primeros contro-les predictivos basados en modelos. Se trataba de algoritmos de control en losque se podıa utilizar modelos mas sencillos, las restricciones de funcionamiento sepodıan tener en cuenta en el diseno del controlador en cada instante de muestreoutilizando horizontes de control finitos.
Las primeras implementaciones en la industria se desarrollaron en paralelo:Identification and Command idcom y Dynamic Matrix Control dmc. En basea estas dos metodologıas se fueron desarrollando paulatinamente distintas po-sibilidades que cubrıan las aplicaciones industrial y estudios teoricos. Las masdestacables son: Quadratic dmc (qdmc) (Garcıa & Morshedi 1986) esta basa-do en el dmc y minimiza el ındice aplicando la programacion cuadratica qp) eincluye de forma explıcita las restricciones en las entradas y salidas del proceso.
Generalized Predictive Control (gpc) (Clarke, Mohtadi & P.S.Tuffs 1987a),(Clarke, Mohtadi & P.S.Tuffs 1987b) para procesos lineales que aglutina muchasde las caracterısticas de los controladores predictivos (Albertos & Ortega 1989),(Clarke & Mohtadi 1989), (Ordys & Clarke 1993). Tambien se ha llevado a ca-bo con la inclusion de restricciones (Camacho 1993), (Chow & Clarke 1994),(Kznetsov & Clarke 1994), (Tsang & Clarke 1988), (Clarke & Scattolini 1991) ycabe destacar su utilizacion en el campo de controladores adaptativos predicti-vos. Existen aplicaciones en la industria, de dicho controlador, algunas de ellas sepueden ver e (Clarke 1988), (Chow & Clarke 1994), (Linkens & Mahfouf 1994),(Rossiter, Kouvaritakis & Dunnett 1991) .
Generalized Predict( idcom-m) (Grosdidier, Froisy & Hammann 1988)tam-bien denominado Hierarchical Constraint Control(hiecon) esta basado en el id-com presentando cambios en la funcion objetivo y en la priorizacion de las res-tricciones. La funcion de coste se compone de dos funciones objetivos. Primerose evalua los errores de prediccion y siempre que queden grados de libertad seoptimiza respecto a las acciones de control.
Gracias a investigaciones relevantes en el ambito academico (Rawlings &Muske 1993) se ha ampliado el conocimiento sobre las propiedades del cpbm,lo cual ha permitido que se desarrolle un marco comun a nivel practico y concep-tual tanto para ingenieros de control como para investigadores. Existe literaturasuficiente que recoge el estado del arte sobre el control predictivo a nivel tec-nologico y teorico (Clarke 1994),(Froisy 1994), (Garcıa, Prett & Morari 1989),(Keyser 1991), (Morari & Lee 1999), (Muske & Rawlings 1993), (Nikolaou 1998),(Qin & Badgwell 2003), (Richalet 1993). Todas estas publicaciones coinciden en

Capıtulo 2. Estado del arte 27
que el futuro del cpbm esta ligado a su combinacion con otras areas de la inge-nierıa de control y otras areas de conocimiento como pueden ser: el control inte-ligente (fuzzy,neural) (Nikolaou 1998), el control no lineal (Garcıa et al. 1989),los nuevos esquemas de identificacion, (tanto de procesos como de lımites parala incertidumbre) (Bemporad & Morari 1999b), en las mejoras de los metodos deestimacion del estado (alternativas al filtro Kalman) (Qin & Badgwell 2003), enlas mejoras de las interfaces del usuario y dialogo con el operador (Froisy 1994),en la monitorizacion de procesos y diagnosticos de fallo para comprobar el fun-cionamiento optimo del controlador predictivo (control estadıstico de procesos ospc) (Froisy 1994), en la integracion de niveles en la jerarquıa de control (Morari& Lee 1999).
Las lıneas de investigacion mas relevantes, sobre control predictivo, en la ac-tualidad son las siguientes:
Control predictivo estable.La estabilidad del control predictivo se suele realizar mediante la formu-lacion del control predictivo en variables de estados. Las formulacionesde control predictivo con garantıa de estabilidad han ido evolucionandodesde el uso de metodos con horizontes infinitos de prediccion (Muske &Rawlings 1993), (Zheng & Morari 1995), horizontes casi-infinitos (Chen &Allgower 1998) hasta llegar a la necesidad de la region terminal y del costeterminal (Mayne, Rawlings, Rao & Scokaert 2000).
Control predictivo no lineal.Donde se utiliza tanto los modelos de entrada-salida como los modelos enespacio de estados (Mayne 2000), (Rawlings, Meadows & Muske 1994). Sinembargo, la mayorıa de modelos utilizados siguen expresando dinamicaslineales sujetas a una no linealidad de tipo estatico (Genceli & Nikolaou1995). Cabe destacar, por una parte, el uso de modelos lineales variantesen el tiempo para representar los modelos no lineales, lo que conduce ala obtencion de controladores predictivos lineales variantes en el tiempo(Salcedo, Martınez, Ramos & Herrero 2006), por otra parte, el uso de tecni-cas de optimizacion heurıstica, como los Algoritmos Geneticos, para resolverde forma eficiente el problema de optimizacion de no convexo de cpbm alusar el modelo no lienal (Blasco 1999), (Blascos, Martınez, Herrero, Ramos& Sanchıs 2006).
Control predictivo robusto.Bemporad y Morari recopilan en (Bemporad & Morari 1999b), diferentesformas de atacar la robustez dentro del marco del control predictivo, aten-diendo a las diferentes formas de representar la incertidumbre y de calcularel controlador robusto. Por ejemplo en (Kouvaritakis, Rossiter & Ju 1997),

28 2.1. Control Predictivo Basado en Modelos
la incertidumbre se representa como una elipse en el vector de parametrosestimado para una funcion de transferencia. En (Badgwell 1997), la incer-tidumbre en el modelo se parametriza por una lista de posibles plantasy se anaden al problema original restricciones para asegurar la estabili-dad robusta. Otra aproximacion es la denominada min-max mpc (Lee &Yu 1997), donde se presenta una formulacion basada en la minimizaciondel peor caso de un ındice cuadratico para sistemas con parametros varia-bles en el tiempo pero acotados. En el mismo sentido, (Megıas, Serrano &Prada 2001) presenta un min-max GPC∞ donde la incertidumbre se repre-senta de forma politopica. En (Primbs, Nevistic & Doyle 2000) se presentaun procedimiento para comprobar la robustez de controladores predictivosde sistemas lineales con restricciones en las entradas, basado en las solucionde una serie de desigualdades lineales matriciales lmi.
Control predictivo adaptativo.Aunque el gpc es el algoritmo orientado al control predictivo adaptativo porexcelencia (Kinnaert 1989). pocas son las aplicaciones reales que incluyenadaptacion en lınea. El control adaptativo indirecto tiende a ser sustituidopor un paradigma que contempla la integracion de la identificacion y elcontrol predictivo. Parte del trabajo desarrollado en esta tesis se encuentrasituado dentro de ese marco. En esta aproximacion y debido a los proble-mas que presenta la identificacion en bucle cerrado, se insiste en manteneruna excitacion persistente en las senales para poder identificar (Genceli &Nikolaou 1996), (Shouche, Genceli & Nikolaou 2002).
Control predictivo de sistemas hıbridos.Los sistemas hıbridos se caracterizan por la interaccion de modelos de va-riables continuas y sistemas de eventos discretos. Dichos sistemas puedentrabajar en diferentes modos de operacion (debido a la ocurrencia de even-tos) y cada modo se gobierna por un sistema de ecuaciones diferencialeso en diferencias. En los ultimos anos han surgido diferentes metodos parael el analisis y diseno de controladores para sistemas hıbridos (Camacho &Bordons 2004), (Bemporad & Morari 1999a), (Morari 2005)
Utilizacion de tecnicas de optimizacion alternativas.Como ejemplos de dichas alternativas se pueden destacar la programa-cion dinamica (Perez 1995) y los algoritmos geneticos o simulated annea-ling (Martınez, Sennet & Blasco 1996), (Martınez, Sennet & Blasco 1998),(Onnen, Balbuska, Kaymak, Sousa & Verbruggen 1997). Los nuevos meto-dos de optimizacion se aplican a problemas no lineales, con restricciones defuncionamiento y con nuevos ındices (problemas no convexos y/o disconti-nuidades a resolver en tiempo real).

Capıtulo 2. Estado del arte 29
2.1.4. Control predictivo en la industria
El Control Predictivo es un tipo de control de naturaleza abierta dentro delcual se han desarrollado numerosas aplicaciones, tanto en el mundo academicocomo en el area industrial. Existen en la actualidad muchas aplicaciones de contro-ladores predictivos a diversos procesos que van desde sistemas tan diversos comorobots (Ortega & Camacho 1996) a la anestesia clınica (Linkers & Mahfonf 1994),aplicaciones en la industria de cemento, desecadoras, brazos roboticos que se pue-den encontrar descritas en (Clarke 1988). Todas ellas funcionando con exito, loque avala la capacidad del cpbm para conseguir sistemas de control de elevadasprestaciones capaces de operar sin apenas intervencion durante largos perıodosde tiempo.
En (Qin & Lee 2001) y (Qin & Badgwell 2003) se da una vision general delestado actual del control predictivo en la industria, ademas de destacar los ulti-mos avances en este campo. En la ultima decada ha habido numerosas empresasque han comercializado paquetes de control predictivo. Las companıas mas im-portantes que en la actualidad ofrecen productos de control predictivo son lassiguientes:
Aspen Technology comercializa los productos Dynamic Matrix Control(dmcplus), Identification and Command smc-idcom de la companıa Set-point Inc., la cual absorbio, ademas del software Optimum PredictiveControl heredado de la companıa Treiber Controls opc tambien adqui-rida.
Honeywell ofrece Robust Model Predictive Control Technology rmpct ydespues de absorber la companıa Profimatics, el paquete Predictive ControlTechnology pct.
Sherpa Engineering comercializa el producto Predictive Controller for Re-actors pcr y engloba los productos Predictive Functional Control pfc yHierarchical Constraint Control hiecon de la ex-Adersa.
Shell Global Solutions ofrece el producto Shell Multivariable Optimiser Con-trol smoc.
Invensys absorbio a Predictive Control Ltd que desarrollo el producto Con-noisseur.
ABB comercializa el paquete 3dcpbm.
Pavilion Technologies Inc. con el producto Process Perfecter para cpbm nolineal.

30 2.2. Energıa solar y climatizacion
En (Qin & Badgwell 1997) y (Qin & Badgwell 2003) se pueden ver datospublicados por las anteriores companıas. Se puede apreciar que un 67 % de apli-caciones pertenecen a la industria petroquımica y de refino, que la companıaAspen se destaca entre las otras por ser la empresa que ha instalado mayornumero de aplicaciones y por el proceso controlado de mayor tamano con 603variables controladas y 283 variables manipulables. En el ano 1997 hubo un totalde 2200 aplicaciones de cpbm instaladas, numero que se duplica en solo 5 anos,en el 2003 se ha llegado a instalar hasta 4600 aplicaciones de cpbm. Lo que ponede manifiesto el creciente auge de los controladores predictivos en su aplicacionindustrial.
2.2. Energıa solar y climatizacion
2.2.1. Energıa solar y sistemas termicos solares
2.2.1.1. Energıa solar termica
La energıa solar termica constituye una forma de energıa solar activa, es decir,que no consiste en recibir pasivamente la accion de la luz y el calor solares, sinoque hace uso del efecto de calentamiento producido, mediante un procedimientotecnico simple y una serie de dispositivos, para captarlos, y poder ası transferirlosa otros usos derivados. Existen tres tecnicas diferentes entre sı en funcion de latemperatura que puede alcanzar la superficie captadora. Ası se suelen distinguirentre: baja temperatura, media temperatura y alta temperatura, segun la capta-cion sea directa, de bajo ındice de concentracion o de alto ındice de concentracion,respectivamente.
1 La tecnologıa de baja temperatura va destinada al calentamiento de agua pordebajo de su punto de ebullicion. Es la tecnologıa mas empleada en los sis-temas de climatizacion y se pueden dividir entre los siguientes subsistemas:
Subsistema colector. Normalmente estan integrados por los siguienteselementos: superficie captadora (normalmente de color negro), circuitopor donde circula el fluido, cubierta transparente, aislamiento termicoy caja protectora.
Subsistema de almacenamiento. Constituido por depositos de dimen-siones adecuadas, siendo su objetivo almacenar el agua caliente queprocede de los paneles para su uso posterior.

Capıtulo 2. Estado del arte 31
Subsistema de distribucion. Constituido por redes de tuberıas, valvu-las, bombas y accesorios, y que tienen por finalidad transportar el aguacaliente desde el sistema colector al de acumulacion y desde aquı a lospuntos de consumo.
Subsistema de medida y control.
La idea basica de estos sistemas es que su funcion es la de obteneragua caliente a partir de la energıa solar radiante, y posteriormenteutilizar este agua para calefaccion o refrigeracion. La configuracion deestos sistemas es similar en ambos casos, con la salvedad de que en elcaso de la refrigeracion se hace necesario la introduccion de un nuevoelemento que utilizando la energıa almacenada en el agua caliente deprocedencia solar, obtengamos agua con un nivel termico apropiadopara la refrigeracion. Este elemento es la maquina de absorcion.
En climatizacion se usan tambien tubos de vacio o incluso cilindroparabolicos.
2 La tecnologıa de media temperatura va destinada a aquellas aplicaciones querequieren temperaturas superiores a los 100C. este tipo de sistemas sepuede utilizar para la produccion de vapor o para el calentamiento de otrotipo de fluido, pudiendose alcanzar hasta los 300C. Una vision general sobrela aplicacion de controladores basicos a este tipo de sistemas, se presenta enel artıculo (Rubio, Camacho & Berenguel 2006), donde los autores realizanun barrido de los ultimos veinticinco anos de los controladores aplicados aun campo de colectores solares distribuidos de tipo acuarex, situado enla Plataforma Solar de Almerıa.
3 La tecnologıa de alta temperatura esta dirigida a aquellas aplicaciones querequieren temperaturas superiores a los 300C, fundamentalmente produc-cion de energıa electrica. Las Centrales Electricas Termosolares (cet) sonsistemas empleados para obtener la energıa electrica a partir de la energıasolar mediante la transformacion previa de esta en energıa termica. El di-seno de este tipo de centrales no comienza hasta 1977 (Ruız & Gomez 1982),poniendose en marcha las primeras en 1981.
Fundamentos de un Sistema Solar Termico de Baja Temperatura
Como ya se ha expresado en las paginas anteriores, se entiende por captaciontermica de la energıa solar al procedimiento de transformacion de la energıa ra-diante del sol en calor o energıa termica. Cuando la energıa termica que se obtienese utiliza para temperaturas inferiores a 80C se denominan aplicaciones de laenergıa solar a baja temperatura. Se pretende de esta forma obtener a partir del

32 2.2. Energıa solar y climatizacion
sol una energıa que se puede utilizar en aplicaciones termicas: calentar agua sani-taria, calefaccion de espacios, maquinas de absorcion, calentamiento de piscinas,secaderos, etc. (Chaves 1999). A nivel de usuario, un sistema de energıa solartermico de baja temperatura para la produccion de agua caliente consiste en unconjunto de elementos al que se le alimenta con agua frıa y produce agua caliente.Generalmente el sistema de energıa solar termica esta constituido por varios sub-sistemas. Los distintos subsistemas (a los que denominaremos ’sistemas’ a partirde ahora para no arrastrar el prefijo sub a lo largo de la explicacion) que puedenformar parte de un sistema de energıa solar termica son: Sistema de captacion,sistema de acumulacion, sistema hidraulico, sistema de intercambio, sistema deenergıa auxiliar y sistema de control.
2.2.2. Energıa solar y sistemas de refrigeracion solar
2.2.2.1. Introduccion
La posibilidad del empleo de la energıa solar en refrigeracion y aire acondicio-nado ha atraıdo la atencion del hombre desde el desarrollo de la tecnologıa solar.La necesidad de aire acondicionado para confort termico en zonas calientes delmundo y la abundancia de sol en estas areas permite combinar ambas circunstan-cias para beneficio de las personas. Al contrario que en el caso de calefaccion, elenfriamiento solar es preciso cuando la radiacion solar se encuentra en su puntomas elevado, con lo que su empleo se hace mas atractivo. En (Balaras et al. 2007)los autores realizan un estado del arte de las instalaciones de energıa solar enEuropa.
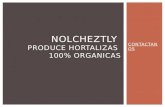
Entre las diversas aplicaciones termicas de la energıa solar, la refrigeracion esuna de las mas complejas, tanto en concepto como en concrecion practica. Estaes una de las razones por lo que su utilizacion hoy en dıa no este tan extendidacomo en el caso de la calefaccion de espacios o calentamiento de agua. En el casoque nos ocupa no es suficiente recoger la energıa solar, almacenarla y distribuirla;la energıa debe ser convertida en frıo a traves de un equipo conveniente, capaz deabsorber calor a baja temperatura desde el espacio acondicionado y expulsarlo aun medio (generalmente el medio ambiente) a temperatura media. Un esquemacompleto de un sistema de aire acondicionado con empleo de energıa solar sepresenta en la figura 2.3, donde se muestran los componentes mas comunes a lamayorıa de estos sistemas.
Un fluido es calentado en los colectores solares a una temperatura superior ala ambiente y usando como fuente de energıa para una unidad de refrigeracion. El

Capıtulo 2. Estado del arte 33
Sistema de acumulación
Sistema de acumulación
Sistema auxiliar
de energía
Torre de refrigeración
Sala acondicionada
Sistema de energía solar
Máquina de absorción
fan coils
Figura 2.3: Esquema planta de refrigeracion solar.
fluido puede ser agua, aire u otro lıquido, debiendo ser almacenado para su empleocuando no exista radiacion solar. El calor tomado del espacio acondicionado y dela fuente de energıa solar es liberado al medio ambiente a traves de una torrede refrigeracion o un condensador. La unidad de refrigeracion puede producirsu efecto de diferentes formas. Puede generar agua frıa que debe ser distribuidaa unidades de fan coil, o usada para enfriar aire que se distribuye a traves deconductos. El agua enfriada debe ser almacenada para usarla cuando la unidadde refrigeracion no este operando. Alternativamente, la maquina puede enfriaraire directamente.
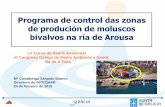
Antes de considerar los diversos ciclos que deben ser usados para refrigeracionsolar es importante comprender los principios termodinamicos que entran en jue-go. La figura 2.4 es un diagrama esquematico que describe la unidad operandoentre la fuente de calor y tres temperaturas diferentes: TL es la baja temperaturapredominante en el medio enfriado; TH es la alta temperatura suministrada por lafuente de energıa solar; TA es la temperatura del medio ambiente donde el calor esexpulsado. La unidad de refrigeracion descrita en conceptos basicos termodinami-cos como una combinacion de dos unidades cıclicas operando juntas, una comomaquina de calor y la otra como maquina de refrigeracion. La primera recibe ca-lor en la cantidad QH desde la fuente de alta temperatura, convierte parte de ellaen trabajo W y expulsa el resto al medio ambiente de temperatura intermedia.El trabajo W es usado por la maquina de refrigeracion para extraer el calor QL
del medio de baja temperatura TL y expulsarlo a temperatura TA . De acuerdocon el Segundo Principio de la Termodinamica los mejores resultados se obtie-

34 2.2. Energıa solar y climatizacion
T A T H
T L T A
W
Q A2
Q L Q A1
Q H
Figura 2.4: Representacion temodinamica de una unidad de refrigeracion
nen de la maquina cuando ambas unidades cıclicas son reversibles. En este casola eficiencia de la maquina de calor es el rendimiento de Carnot (Carnot 1824):η = W
QH= 1 − TA
THy el coeficiente del refrigerador es: β = QL
W= TL
TA−TL. Com-
binando ambas ecuaciones, el COP de la maquina de refrigeracion se obtienecomo:
COP =QL
QH
=TL
TH
TH − TA
TA − TL
Varias conclusiones se pueden sacar de la expresion anterior. Esta claro queel comportamiento de la maquina depende en gran medida de la temperatura dela fuente de calor, obteniendose mejores resultados cuando TH es lo mas elevadaposible. El tipo de colector solar usado para suministrar el calor proporciona unalimitacion en el COP . Con colectores de placa plana comunes el calor es obte-nido a temperaturas relativamente bajas. Los colectores concentradores alcanzantemperaturas mas elevadas pero mas caros y complejos para operar, debido a susnecesidades para seguir al sol. Otra conclusion de la ecuacion anterior es que elrendimiento mejora por disminucion de la temperatura TA .
Una discusion sobre las tecnologıas de sistemas de refrigeracion solar ve puedeobtener en las siguientes referencias: (Papadopoulos, Oxizidis & Kyriakis 2003),(Lamp & Ziegler 1998), (Tsoutsos, Anagnostou, Pritchard, Karagiorgas & Agoris2003), (Grossman 2002), (Li & Sumathy 2000), (Henning 2004) . El artıculo

Capıtulo 2. Estado del arte 35
de Grossman (Grossman 2002) presenta un vision general de estos sistemas, in-cluyendo consideraciones termodinamicas y el libro de Henning (Henning 2004)ademas incluye aspectos practicos del diseno. Los sistemas usados en refrigera-cion solar se pueden divididir en dos grandes categorıas. La primera comprendelos ciclos cerrados, donde los fluidos de trabajo estan encerrados en el interior dela maquina y no van en contacto directo con el medio refrigerado; el segundo con-siste en ciclos abiertos, donde el aire acondicionado es empleado para controlarla deshidratacion y evaporacion.
La categorıa de ciclos cerrados incluye principalmente los de compresion devapor y sistemas de absorcion o de adsorcion. Ambos tipos usan un refrigeranteen contacto indirecto con el medio refrigerado. El calor es tomado a baja tempe-ratura por evaporacion del refrigerante a baja presion. El calor es liberado porcondensacion a elevada presion correspondiente a la temperatura del sumidero decalor. Los sistemas de compresion de vapor emplean un compresor mecanico o unotipo eyector para transferir el refrigerante desde el evaporador al condensador.
Los sistemas de absorcion ejecutan esta tarea mediante un segundo fluido (elabsorbente). Ambos tipos de sistemas cuentan con calor solar como fuente deenergıa. Los ciclos desecantes usan el agua contenida en el aire acondicionado co-mo refrigerante consumible. la manipulacion del calor latente a traves de cambiosen el contenido en agua del aire permite el control de la temperatura y hume-dad. El agua anadida al aire no es recuperada, y en este sentido el sistema esabierto. Los desecantes son regenerados por energıa solar. Los ciclos mencionadosanteriormente se consideran unidades activas.
Otra aproximacion a la refrigeracion solar de edificios es a traves de lo que seconoce con el nombre de sistemas pasivos. Estos deben ser disenados para el climaparticular de cada region y no son tan universales como las unidades activas. Noobstante, poseen un gran potencial para la conservacion de la energıa.
Un factor importante en refrigeracion solar es su coste. La elevada inversionde capital hace que la importancia de estos sistemas quede por debajo de los sis-temas convencionales cuando solo opere durante unos pocos meses al ano. Esto,evidentemente, depende de la localizacion del usuario. Un hotel en el tropico, porejemplo, usarıa aire acondicionado durante todo el ano. En otras areas, combinan-do la refrigeracion solar con la calefaccion en invierno debe dar mejor rentabilidada la instalacion y mejorar considerablemente los resultados economicos.
En el presente, la aplicacion de la energıa solar en este sentido va en aumentoaunque esta todavıa lejos del objetivo deseable. la investigacion y el desarrolloampliaran, sin duda, su empleo (Conde & Marquez 1991), (Beckman & Klein

36 2.2. Energıa solar y climatizacion
1978), (Patel & Mansoori 1979), (Ishibashi 1977), (Johnston 1980), (Ward 1979),(Sheridan & Grassie 1977), (Kohne et al. 1996a), (Li & Sumathy 2001), (Balaraset al. 2007), (Casals 2006), (Fan et al. In Press 2006)
Una descripcion de la instalacion que ha sido objeto de estudio en esta tesisse detalla en el apendice A.
2.2.2.2. La maquina de absorcion
La tecnologıa de sistemas de absorcion, puede ser utilizada en aire acondiciona-do y refrigeracion para los sectores residencial, comercial e industrial. El renovadointeres en esta tecnologıa, es explicado por los notables resultados obtenidos enel desarrollo de nuevos ciclos de absorcion, nuevos fluidos de trabajo, equipos detransferencia de masa y calor mas compactos y eficientes, nuevos materiales deconstruccion y una mayor integracion energetica interna.
El enfriamiento producido por absorcion de vapor y la vaporizacion de unlıquido lo produjo por primera vez Faraday en 1824, utilizando amonıaco lıquidoy cloruro de plata en un pequeno equipo intermitente, pero fue el frances Ferdi-nand Carre quien invento el sistema de refrigeracion por absorcion de operacioncontinua y lo patento en los Estados Unidos en 1860, (Pilatowsky, Best, Gutierrez& J.I.G.Hernandez 1993). Aunque el enfriamiento por absorcion es conocido des-de hace mas de cien anos, fue poco investigado despues de su invencion, ya queen esos tiempos los recursos energeticos se consideraban abundantes y baratos.Los anos sesenta del siglo pasado presenciaron un resurgimiento de la tecnologıade absorcion con aplicacion en aire acondicionado, se desarrollaron sistemas queutilizan como fluidos de trabajo amonıaco-agua y bromuro de litio-agua. La granmayorıa de estas unidades fueron disenadas para operar con fuego directo y va-por de agua. Estos equipos tenıan un coeficiente de operacion (COP) en modode enfriamiento de alrededor de 0.5. La evolucion y los diferentes tipos ciclos deabsorcion se pueden consultar en (Limon 2002).
De las unidades de refrigeracion de ciclo cerrado el ciclo de absorcion es el querepresenta mayor complejidad. Emplea dos fluidos de trabajo: un refrigerante yun absorbente, en contraposicion al unico fluido de trabajo usado en los sistemasde compresion de vapor. Ademas del evaporador y condensador se compone de deuna combinacion absorbedor/generador capaz de utilizar calor procedente de unafuente a elevada temperatura para producir un efecto de compresion. Su mayorventaja estriba en la ausencia de partes moviles (excepto pequenas bombas). En laactualidad el ciclo de absorcion es el mas utilizado en aplicaciones solares (Nasser& Osman 1984), (Atmaca & Yigit 2003).

Capıtulo 2. Estado del arte 37
El ciclo utilizado en la instalacion estudiada en esta tesis, es el compuesto poruna solucion acuosa de bromuro de litio (LiBr), a partir de este punto cualquierdato concreto (temperaturas, energıas, entalpıas, etc) referente a los ciclos deabsorcion se cenira exclusivamente a la solucion de LiBrAgua, las generalidadesde este ciclo son extrapolables a cualquier otro.
Refrigerante
Cualquier sustancia a una determinada temperatura y presion, alcanza unequilibrio fısico y se presenta bajo forma de solido, lıquido o gas. Si se aporta ose extrae calor de estas sustancias en cantidad suficiente se pasa de un estadoa otro. Lo mismo ocurre si se cambia las condiciones de presion. Para variar lapropia temperatura cualquier sustancia debe asumir o ceder calor; a este calor sele llama ’calor sensible’.
Durante un cambio de fase, una sustancia intercambia calor permaneciendoconstante su temperatura hasta que dicho cambio finaliza. Hasta que el volumentotal de la sustancia no haya asumido el cambio de estado: la cantidad de calorcedida o tomada de una sustancia durante un cambio de estado se llama ’calorlatente’. El calor latente es la base fısica de casi todos los ciclos frigorıficos, pero delos dos calores latentes (solido/lıquido y lıquido/vapor) existentes, se aprovechasolo el del cambio de lıquido a vapor.
La temperatura de cambio de estado depende de la presion: si se baja la presionhasta llegar a producir la evaporacion, del ambiente circundante y/o de la masadel lıquido que evapora, sera extraıda una cantidad de calor igual al calor latentede evaporacion de la sustancia que ha cambiado de estado, con la consiguientebajada de temperatura. Por el contrario, incrementando el valor de la presion, seinicia la fase de licuefaccion o condensacion y una cantidad de calor, equivalenteal calor latente, es cedida a la masa del lıquido que absorbe y/o al ambientecircundante, aumentando la temperatura. Los factores que permiten valorar laidoneidad de una sustancia para ser empleada como refrigerante son el valor delcalor latente y la combinacion Temperatura/Presion de cambio de estado.
Existen diferentes y buenos fluidos refrigerantes: amonıaco y agua son unejemplo: esta ultima tiene de hecho un calor latente de evaporacion de 0,625kW/kg.
Absorbente
El factor en base al que una sustancia en estado lıquido o en solucion seconsidera idonea para ser utilizada como absorbente, es la capacidad de absorber

38 2.2. Energıa solar y climatizacion
un gas o un vapor.
El Bromuro de Litio, como absorbente, tiene propiedades muy similares a lasde la sal comun (NaCl). De hecho el Bromuro absorbe agua y se disuelve en ellacon extrema facilidad. La solucion acuosa de LiBr, ademas y en concentracionelevada, conserva un valor de presion de vapor bajo (elevada capacidad absor-bente) y esto tambien para temperaturas relativamente elevadas (por ejemplo40C).
La utilizacion combinada de LiBr como absorbente y agua como refrigerantees ideal para los ciclos frigorıficos por absorcion (Nasser & Osman 1984) en losterminos de punto de ebullicion, de calor especıficos, de calor latente, de viscosi-dad y de estabilidad quımica tambien si presenta algunos problemas relacionadoscon su agresividad quımica hacia algunos metales. En cualquier caso, desde elmomento en que el sistema Agua/Bromuro de Litio debe operar constantementebajo vacıo parcial y en ausencia de aire, la cinetica del proceso corrosivo se re-ducira significativamente. Tambien para velocidades de corrosion muy bajas, seforma igualmente Hidrogeno como resultado del proceso corrosivo que, a largoplazo, podrıa provocar disminucion del nivel de vacıo; por este motivo a la solu-cion LiBr se anade un inhibidor de corrosion para que las superficies internas delas maquinas queden protegidas con una pelıcula a base de Fe2
O4.
El Ciclo Frigorıfico por Absorcion
El ciclo frigorıfico de los equipos por absorcion de Agua/Bromuro de Litio sepuede esquematizar en cuatro fases distintas que se suceden en el orden: Genera-cion Condensacion Evaporacion Absorcion:
Generacion: Calentando y llevando a ebullicion en el generador la soluciondiluida de Bromuro de Litio se obtienen el fluido refrigerante (vapor deagua) y el fluido absorbente (solucion concentrada)
Condensacion: el fluido refrigerante se condensa en el condensador contransferencia de calor latente de condensacion.
Evaporacion: el fluido refrigerante, producido en estado lıquido de la se-gunda fase, entra en el evaporador donde, como consecuencia de la bajapresion presente, evapora inmediatamente extrayendo del ambiente circun-dante (agua circulante en el serpentın del evaporador) una cantidad de calorequivalente al calor latente de evaporacion.
Absorcion: la solucion concentrada reducida en la primera fase, absorbe elvapor que proviene del evaporador, bajando la presion de vapor ambiente: el

Capıtulo 2. Estado del arte 39
calor latente de condensacion es cedido al agua de enfriamiento que circulapor los serpentines.
El ciclo frigorıfico se obtiene repitiendo cıclicamente a las cuatro fases descritasarriba, en el interior de la maquina del esquema de la figura 2.5.
3
2
1
4
5
Líquido refrigerante
Agua fría
Vapor refrigerante Agua
enfriamiento
So
luci
ón
d
iluid
a
So
luci
ón
co
nce
ntr
ad
a
Va
po
r re
frig
era
nte
1 Generador
2 Condensador
3 Evaporador
4 Absorbedor
5 Intercambiador de calor
Figura 2.5: Esquema de maquina frigorıfica por absorcion
En esta maquina la solucion diluida hierve en el interior del generador y seproduce solucion concentrada y el vapor refrigerante: la solucion concentrada sedistribuye uniformemente sobre los serpentines del absorbedor y produce en estazona una bajada de la presion y, dado que el evaporador y el absorbedor sonintercomunicantes entre ellos, la presion de ambas secciones sera equivalente.
El vapor refrigerante producido por la solucion diluida durante la ebullicionen el generador, condensa sobre los serpentines del condensador; el refrigeranteen estado lıquido que ası se acaba de formar, se distribuye sobre los serpentinesdel evaporador y evapora como consecuencia del valor bajo de la presion mante-niendo en la zona por efecto de la absorcion del vapor por parte de la solucionconcentrada: el evaporador extrae una cantidad de calor, equivalente al calor la-tente de evaporacion, del agua que circula en el interior de los serpentines delevaporador.
El vapor absorbido por la solucion concentrada la diluye y el calor latentede condensacion que se libera, se transfiere al agua de enfriamiento que circulapor el interior de los serpentines del absorbedor. La solucion diluida que se sale

40 2.3. Conclusion
del absorbedor y la solucion concentrada que proviene del generador presentanrespectivamente temperaturas baja y alta: para aumentar la eficiencia termica dela maquina, se ha provisto al circuito de un interambiador de calor que permite elprecalentamiento de la solucion diluida, por la concentrada, antes de que aquellavuelva al generador para repetir el ciclo.
2.3. Conclusion
En este capıtulo se ha plasmado los fundamentos del control predictivo basadoen modelos (cpbm), ası como de sus diferentes implementaciones, resaltando laimportancia que tiene el cpbm en el entorno industrial. Tambien se ha presentadouna vision global de la energıa solar para la refrigeracion, destacando el papel quejuega la maquina de absorcion en los sistemas de refrigeracion solar y detallandosu funcionamiento.

Capıtulo 3
Estrategia de control y Algoritmode Optimizacion del COP
En este capıtulo se describe la estrategia de control propuesta y se presentael desarrollo del algoritmo de optimizacion de COP que calcula el el punto deoperacion optimo para alcanzar el maximo rendimiento de la planta.
3.1. Introduccion
En el Apendice A del presente trabajo se describe la instalacion de la plantasolar de frıo. En la figura 3.1 se representa un esquema simplificado de la planta,donde se pueden observar sus principales componentes. No obstante, es conve-niente introducir algunos detalles sobre su diseno con el fin de contextualizar yentender las estrategias y los objetivos de control propuestos en este capıtulo. Elagua enfriada mediante la maquina de absorcion se hace circular hacia una unidadde fancoil (unidad terminal provista basicamente de un ventilador y un serpentınde intercambio termico por donde circula agua frıa) agua-aire horizontal que seencuentra instalada en el falso techo de la estancia que se desea refrigerar. Elagua enfriada circula a traves de un circuito cerrado de tuberıas. De forma que elagua de salida del evaporador (Tsev) se corresponde con el agua de entrada a labaterıa del fancoil mientras que el agua de retorno del fancoil se direcciona haciael el evaporador de la maquina de absorcion, como se muestra en la figura 3.1.
Segun las especificaciones tecnicas del fancoil, los valores nominales de lastemperaturas de entrada y salida del agua en la baterıa son de 7 y de 12C
41

42 3.1. Introduccion
Sistema de acumulación
Sistema de acumulación
Sistema auxiliar
de energía
B4
Torre de refrigeración
Sala acondicionada
204
201
202
203
205
206 301
VM1
VM3 B1
Sistema de energía solar
Máquina de absorción
fan coils
Teev
Tsev
Tege
Tege
Tsge
Tstr
Tetr
Figura 3.1: Esquema de la planta solar.
respectivamente. Los valores anteriores son validos para un caudal nominal deaire y para unas condiciones determinadas del aire del interior de la sala: 27Cde bulbo seco y 19C de bulbo humedo.
Y segun las caracterısticas de la maquina de absorcion, los valores nominalesdel agua refrigerada se encuentran entre 9 y 14C de salida y entrada respectiva-mente, siendo la temperatura mınima de salida de 8C. La maquina de absorciones capaz de hacer descender la temperatura del agua de retorno del fancoil hasta5C. Debido a las limitaciones del equipo de absorcion, el agua de entrada alfancoil sera siempre, como maximo 5C menos que la de salida (del fancoil), ycomo mınimo 8C.
La unidad de fancoil esta provista de un termostato accesible desde la estanciarefrigerada. Dicho termostato es el encargado de controlar la temperatura de lasala.
Por consiguiente, para conseguir la refrigeracion de la estancia, se debe hacerfuncionar la maquina de absorcion a lo largo de las horas del dıa en las que sequiere acondicionar la sala. El termostato del fancoil se encarga de conseguir latemperatura deseada de la sala y el equipo de absorcion debe suministra el aguaenfriada al fancoil.
La estancia, cuyo uso es el de una oficina, solo se refrigera en dıas laborablesy desde las once de la manana hasta las cinco y media de la tarde. Fuera deesta franja horaria y en dıas festivos o no laborables se aprovecha la energıa solar

Capıtulo 3. Estrategia de control y Algoritmo de Optimizacion del COP 43
termica para llenar los acumuladores de agua caliente.
En la figura 3.2 se muestra la temperatura exterior y la radiacion solar detres dıas de verano. Por lo general, en epoca estival, la radiacion alcanza su valormas elevado aproximadamente a las 14:30, mientras que la maxima temperaturaambiente se logra alrededor de las 17:00 horas. La demanda termica se consideraen una franja horaria donde la radiacion solar, para un dıa sin nubes, obtieneunos valores superiores a 500W/m2. La planta solar de frıo alberga un sistema
7:00 22:000
200
400
600
800
1000
1200
Irra
dian
cia
sola
r (
W/m
2 )
7:00 11:00 14:30 17:30 22:0020
24
28
32
36
Horas
Tem
pera
tura
am
bien
te (
ºC)
05/06/0606/07/0603/07/06
R2
Figura 3.2: Radiacion solar y temperatura ambiente en epoca estival.
de simulacion de cargas termicas de la estancia. Con dicho simulador es posiblerealizar ensayos sin que los usuarios de la sala sufran diferencias de temperaturay ademas permite establecer y controlar la demanda de energıa, algo muy utila la hora de practicar comparaciones de experimentos con la misma demandatermica.
El sistema de simulacion de cargas, representado en la figura 3.3, tiene unapotencia maxima de 35 kW . Se utiliza un intercambiador agua-agua que permitesimular cargas variables entre 0 y 35 kW mediante una valvula de tres vıas vm7,que esta controlada por un programa que define la potencia que se demanda encada momento.
Se establece un caudal de circulacion constante por el simulador (6000 l/h) porlo que la demanda de energıa queda definida por las variaciones de temperaturaen el circuito: Q = QT . Si mediante un controlador pi, se regula la temperaturade entrada al evaporador (Tev) (mediante la valvula vm7) la demanda de energıaqueda establecida por la temperatura de entrada al intercambiador del simuladorde carga o lo que es lo mismo por la temperatura del agua enfriada (Tsev). Lascondiciones nominales de diseno del intercambiador para refrigeracion son:

44 3.2. Problema general de control
Acumulador de inercia
Máquina de absorción
VM7
Bomba de calor
B7
Figura 3.3: Simulador de cargas.
Potencia 35 kW
Circuito primario: caudal 6000 l/h, temperaturas: 9/14 C
Circuito secundario: caudal 6000 l/h, temperaturas 45/40 C
Si se utiliza el simulador de cargas para los ensayos, se supone que el valor de latemperatura de salida de la baterıa del fancoil se corresponde con la temperaturade entrada al evaporador. Dicha senal se regula mediante un pi programado paratal efecto. Los valores de la referencia del pi seran proporcionales a la cargatermica de la sala a lo largo del dıa.
Es decir, la temperatura de retorno del fancoil se simula mediante el simuladorde cargas y el pi se encarga de establecer la temperatura a la referencia dada.Dicha referencia variara entre entre 12 y 14C siguiendo una tendencia crecien-te, como la temperatura ambiente, a lo largo del perıodo del dıa en que se haconsiderado la demanda termica de la oficina.
3.2. Problema general de control
La maquina de absorcion opera en transitorio, debido a las condiciones deoperacion. Cambios producidos tanto en las temperaturas como en los caudales

Capıtulo 3. Estrategia de control y Algoritmo de Optimizacion del COP 45
del generador, evaporador y de la torre de refrigeracion, provocan variaciones en latemperatura del agua enfriada (Tsev). Para aplicaciones donde se desea mantenerconstante dicha temperatura es necesario la implementacion de un algoritmo decontrol que mantenga constantes un conjunto de variables o bien que sea capazde adaptar la Tsev a la demanda de enfriamiento actual.
Debido a la variabilidad de operacion y posibilidades de diseno de sistemas defrıo solar no es recomendable usar un diseno especıfico para todas las aplicaciones.
El objetivo de control de la planta solar consiste en el control de la Tsev,maximizando el uso de la energıa solar y la energıa acumulada en los tanques, loque supone un ahorro en el consumo de gas natural.
Como para cualquier otro sistema de proceso industrial que se desee controlar,el control de una planta de refrigeracion solar depende del diseno de la instalaciony de los propios componentes que la constituyen (especificaciones y limitacionesde funcionamiento).
Existen maquinas de absorcion, en las cuales se puede operar internamente,controlando las temperaturas y presiones de sus componentes internos. Sin em-bargo otros equipos de absorcion no permiten conocer los valores de las variablesinternas ni operar con ellas. En dichos equipos solo se puede tener acceso a lastemperaturas de entrada y salida y/o caudales del generador del evaporador y dela torre de refrigeracion. La maquina de absorcion de la planta solar de frıo perte-nece al segundo tipo de equipos. Es decir, la maquina de absorcion se trata comouna caja negra”donde solo se puede tener acceso a las temperaturas de entraday salida y a los caudales del generador, evaporador y torre de refrigeracion. Lasvariables accesibles de la maquina de absorcion son:
Temperatura del agua (entrada y salida) y caudal del generador (agua ca-liente).
Temperatura de (entrada y salida) y caudal de la torre de refrigeracion(agua de enfriamiento).
Temperatura de (entrada y salida) y caudal del evaporador (agua enfriada).
La temperatura de entrada del agua caliente (Teg), se puede controlar y de-pende del modo de funcionamiento (descritos en el capıtulo 4), mientras que Tsge,depende del caudal en el generador. La temperatura de entrada del agua de en-friamiento, depende del tipo y del comportamiento de la torre de regrigeracion,y la temperatura de salida del agua de enfriamiento es el resultado del caudal

46 3.2. Problema general de control
en el absorbedor y en el condensador. En la instalacion ninguna de las variablesconcernientes a la torre de refrigeracion se pueden manipular. La temperatura desalida del agua enfriada (Tsev) es el resultado de la operacion de la maquina deabsorcion bajo condiciones de entrada y normalmente se desea mantener cons-tante dentro de unos lımites para permitir que el sistema de distribucion del aguaenfriada sea satisfactorio. La temperatura de entrada del agua enfriada (Teev)no se puede manipular ni controlar y depende del tipo de sistema de distribuciondel agua enfriada. Los caudales del evaporador y de la torre de refrigeracion per-manecen constantes, mientras que el caudal del generador se puede manipular ocontrolar.
En la mayorıa de los trabajos la temperatura del agua enfriada se controlamediante simples actuaciones on-off, la maquina comienza a funcionar cuandoexiste una demanda de frıo y se para cuando dicha demanda se satisface. Re-sultando una estrategia de control poco efectiva y de bajo cop que da lugar agrandes perdidas de energıa debido a los grandes perıodos de tiempo que necesitala maquina de absorcion para llegar a trabajar en regimen permanente (Ward,Weiss & Lof 1976). En (Lazzarin 1980) se demuestra que el metodo de controlon-off no se deberıa usar en el control de una maquina de absorcion, es mas efi-ciente el control progresivo de la temperatura del generador y/o del caudal delgenerador.
Por otra parte existen aplicaciones de control que se basan en regular la tem-peratura del generador y del agua de enfriamiento de la torre de refrigeracion(Kohlenbach 2006). Como ya se ha mencionado anteriormente, el control de di-cha temperatura depende del diseno del sistema. Para controlar la temperaturade salida del evaporador es necesario mantener constante la temperatura del aguade enfriamiento y los caudales del generador, evaporador y de la torre de refrige-racion. Existen plantas de refrigeracion solar que por su propio diseno mantienenconstantes los caudales anteriormente mencionados y ademas poseen una formade controlar la temperatura del agua de enfriamiento mediante el control de lavelocidad del ventilador de la torre de refrigeracion. Para estos sistemas el controlde la temperatura del agua enfriada se realiza mediante la regulacion de la tem-peratura del generador que proviene normalmente del sistema de acumulacion.La temperatura de los acumuladores se mantiene constante con un buen controlde la temperatura de salida de colectores. En la tesis (Kohlenbach 2006) el autorrealiza la regulacion de la temperatura de salida del evaporador manteniendo latemperatura del agua de enfriamiento constante mediante un segundo controla-dor. Obtiene un modelo tipo caja negra de la temperatura del agua enfriada conrespecto la temperatura del generador. El control se ve limitado a las condicionesde operacion en las que se ha obtenido el modelo.

Capıtulo 3. Estrategia de control y Algoritmo de Optimizacion del COP 47
En (Kohne, Oertel & Zunft 1996b), basan el control de la temperatura desalida del evaporador en la regulacion de la temperatura de salida de colectores.Para ello obtienen en cada momento la referencia de la temperatura del generadorsegun la carga de enfriamiento.
En la planta solar de frıo, el caudal del generador no se mantiene constanteen ninguno de los modos de funcionamiento y ademas la temperatura del agua deenfriamiento no se puede regular. Dicha temperatura varıa segun la temperaturaambiente y la temperatura de entrada a la torre de enfriamiento. Resultando serun problema para el control de la Tsev. Por consiguiente, surge la necesidad deenfocar el control de la planta solar de frıo desde otro punto de vista.
En el presente trabajo se propone un novedoso enfoque para el control de laTsev. La regulacion de la Tsev se realiza mediante el control de la potencia fri-gorıfica demandada expuesta a variaciones de la carga termica de la sala, teniendoen cuenta el rendimiento de la maquina de absorcion, mediante la temperatura yel caudal en el generador.
3.2.1. Estrategia de control
En la tesis se propone una estrategia de control que permite controlar unaplanta solar de frıo. Dicha estrategia de control se disena con la finalidad deregular la potencia frigorıfica dando respuesta a la demanda de frıo a lo largo deldıa con el mayor rendimiento posible de la instalacion. Ademas tambien se deseadar prioridad al uso de la energıa solar ası como aprovechar la energıa sobranteen el sistema de acumulacion y economizar el consumo de energıa auxiliar.
Para alcanzar el cumplimiento de los objetivos el trabajo de investigacion seha desglosado en los siguientes puntos:
1 Desarrollo de un algoritmo para calcular el punto de operacion optimo conel objetivo de alcanzar el mayor rendimiento de la planta.
2 Desarrollo de un algoritmo para seleccionar los modos de funcionamiento yeleccion de controladores.
3 Desarrollo de controladores avanzados dentro del marco del control predic-tivo basado en modelos

48 3.2. Problema general de control
Planta solar Estrategia de control
Restricciones
Variables manipulables
SP _Potencia frigorífica
Potencia frigorífica
Figura 3.4: Estrategia de control.
Optimización COP
Capítulo 3
SP _ Tege
SP _ Qgei
MBPC
Capítulo 5 y 6
variables manipulables continuas
Planta solar
ESTRATEGIA DE CONTROL
Selección controlador
Selección modo de
funcionamiento
SP _Potencia frigorífica
Potencia frigorífica
T ª condensador T ª evaporador T ª generador
Radiación solar T ª ambiente T ª tanques T ª colectores
variables manipulables discretas
Capítulo 4
Figura 3.5: Estrategia de control.
En a figura 3.4 se muestra el esquema general del control de la planta solar defrıo donde se puede observar que se controla la potencia frigorıfica, como se ha

Capıtulo 3. Estrategia de control y Algoritmo de Optimizacion del COP 49
explicado anteriormente.
En la figura 3.5 se detallan los diferentes niveles de control que constituyen laestrategia de control propuesta.
EL Algoritmo de optimizacion del cop, se encarga de calcular la potencianecesaria (caudal y temperatura de entrada del generador) para satisfacer lademanda de frıo teniendo en cuenta el maximo rendimiento, tambien obtiene ella referencia de la potencia frigorıfica.
Por otra parte el Algoritmo de Seleccion de los Modos de Funcionamiento, quedepende de las condiciones de operacion de la planta, obtiene en cada momentola mejor configuracion de la misma manipulando las variables discretas, ademasde seleccionar la estrategia de control aplicada en cada modo.
En cada estrategia de control especıfica se aplican los controladores avanzadosque logran regular el caudal o la temperatura de entrada al generador manipu-lando para tal efecto las variables continuas.
3.3. Algoritmo de optimizacion del COP
3.3.1. Calculo del rendimiento del sistema
Para hallar el rendimiento completo del sistema es necesario realizar el calculopor separado del rendimiento de la maquina de absorcion y de la eficiencia de loscolectores solares. En este apartado se describen todos estos conceptos y se dauna formulacion para obtener el rendimiento total de la planta.
Rendimiento de una maquina de absorcion
El analisis termodinamico de los sistemas de refrigeracion se logra aplicandola primera y la segunda leyes de la termodinamica, para ası determinar los flujosde energıas. En la literatura existen numerosos artıculos en los que se determinael coeficiente de funcionamiento de un sistema de refrigeracion por absorciondesde el punto de vista de la irreversibilidad de la termodinamica: (Blanchard1980), (Yan & Chen 1992), (Klein 1992), (Agrawal & Menon 1993) y (Wu 1995).endorreversible (S.Aphornratana & Eames 1995) (Stocker & Reed 1971), (Chen,Li, Sun & Wu 2002), (Bhardwarj, Kaushik & Jain 2003).

50 3.3. Algoritmo de optimizacion del COP
El comportamiento energetico de las maquinas termicas y de refrigeracionsuele representarse por el denominado coeficiente de funcionamiento: cop1, querepresenta el cociente entre el calor generado (maquina termica) o calor extraıdo(maquina frigorıfica) y la energıa empleada:
COP =Qev
Qge
(3.1)
Donde Qev y Qge son las potencias termicas del evaporador y del generador res-pectivamente las cuales se describen a continuacion:
Qev = mevCp(Teev − Tsev)
Qge = mgeCp(Tege − Tsge)
Siendo mev y mge los caudales masicos del evaporador y del generador, Cp el calorespecıfico del fluido calor portador y Teev, Tsev, Tege y Tsge las temperaturas deentrada y salida del evaporador y generador respectivamente.
Como consecuencia del Segundo Principio, los denominados teoremas de Car-not (Carnot 1824), establecen que el rendimiento maximo de una maquina termicay los cop maximos de las bombas de calor y de las maquinas frigorıficas no de-penden de las maquinas y fluidos que se utilicen en ellas sino de las temperaturasa las cuales se intercambian los calores correspondientes, por lo tanto el cop deCarnot de una maquina de absorcion se calcula de la forma siguiente (Gordon &Ng 2000):
COPcarnot =Tev
Tcond − Tev
Tge − Tcond
Tge
El COPcarnot se corresponde con el valor maximo del cop para un ciclo de re-frigeracion ideal totalmente reversible. Todos los procesos reales tienes algunairreversibilidad por lo tanto el rendimiento de un proceso real siempre sera menorque el rendimiento de un ciclo ideal o de Carnot.
Las curvas de rendimiento de la maquina de absorcion de simple efecto Yazakiwfc-10, que relacionan las temperaturas de la torre de refrigeracion, evaporador ygenerador con el cop y/o la capacidad frigorıfica las proporciona el fabricante delequipo. Tambien se pueden obtener mediante ensayos sobre el equipo de absorciono si se dispone de un modelo del equipo, mediante simulaciones del mismo. Setrata de matener constantes las condiciones de operacion (temperatura del aguade enfriamiento y del evaporador) y variar la temperatura del generador paraobtener ası los valores del cop y de la capacidad frigorıfica. El valor nominaldel cop de la maquina de absorcion de la instalacion es de 0,7 (Yazaki n.d.)En las graficas 3.6, 3.7 y 3.8 se puede observar las variaciones del cop de la
1En ingles: Coefficient Of Performance.

Capıtulo 3. Estrategia de control y Algoritmo de Optimizacion del COP 51
75
80
85
90
95
7
10
12
14
16
0.6
0.8
tge
Tcond=24ºC
tev
CO
P
Figura 3.6: Curva de rendimiento de la maquina de absorcion para Tcond = 24
maquina de absorcion para determinados valores de la temperatura de la torrede refrigeracion, del evaporador y del generador, segun los valores suministradospor el fabricante.
De ahı se deduce que el rendimiento aumenta cuando las temperaturas del ge-nerador y/o del evaporador aumentan, para un valor constante de la temperaturade la torre de refrigeracion. Mientras que el cop aumenta cuando la temperaturade la torre de refrigeracion disminuye.
Eficiencia de colectores solares
Para el calculo del rendimiento del sistema completo, tambien hay que tener encuenta la eficiencia de los colectores solares. A mayor eficiencia mayor conversionde la energıa solar incidente en energıa termica util.
La curva de rendimiento instantaneo de los colectores solares se determinamediante la siguiente ecuacion (Duffie & Beckman 1991):
η = F ′ατ − F ′UL
Tm − Ta
I(3.2)

52 3.3. Algoritmo de optimizacion del COP
75
80
85
90
95
5
10
15
0
0.2
0.4
0.6
0.8
Tege
Tstr=29.5ºC
Teve
CO
P
Figura 3.7: Curva de rendimiento de la maquina de absorcion para Tcond = 29,5
Siendo:
F’ el factor de eficacia o coeficiente de transporte.
α la absortancia de la placa.
τ la transmitancia.
UL el coeficiente global de perdidas termicas del colector normalizado (UL =10W/m2C)
Ta la temperatura ambiente (C).
Tm la temperatura media de los colectores. (Tec−Tsc2
) (C).
I la radiacion global incidente (W/m2).
La ecuacion define una lınea recta con variable independiente Tm−Ta
I. De dicha
ecuacion se deben conocer dos parametros:

Capıtulo 3. Estrategia de control y Algoritmo de Optimizacion del COP 53
7580
8590
95
5
10
15
0
0.2
0.4
0.6
0.8
tge
Tcond=31ºC
tev
CO
P
Figura 3.8: Curva de rendimiento de la maquina de absorcion para Tcond = 31
1. El rendimiento optico del colector (F ′ατ) o corte de la recta con el eje Y .Corresponde al rendimiento maximo que puede dar el colector.
2. La pendiente de la recta (F ′UL) esta relacionada con las perdidas globalesdel colector.
Mediante datos experimentales, se determinan los anteriores parametros. Paralos colectores made 300, haciendo uso de los datos de ensayo, la ecuacion 3.2 sepuede modelar con la recta de regresion siguiente:
η = 0,872− 5,38Tm − Ta
I(3.3)
Donde F ′ατ = 0,872 y F ′UL = 5,38W/m2C
la figura 3.9 muestra la curva de rendimiento instantaneo de los colectoressolares.
Rendimiento total del sistema
Para la obtencion del rendimiento de un sistema de refrigeracion solar porabsorcion hay que tener en cuenta el diseno de la planta. Los sistemas que la

54 3.3. Algoritmo de optimizacion del COP
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.080.45
0.5
0.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
(Tm−Ta) / I
efic
ienc
ia c
olec
tore
s
Figura 3.9: Curva de rendimiento de colectores solares.
componen (tanques, caldera, tipo de colectores, tipo de maquina de absorcion)y la interconexion entre ellos, porque no es lo mismo que el agua de colectorespase siempre a traves de los tanques que esta vaya directamente al equipo deabsorcion.
Los principales componentes de un sistema de refrigeracion solar por absorcionson el sistema de captacion solar y la maquina de absorcion. El comportamientodesde el punto de vista energetico del sistema completo depende de la eficiencia delos anteriores componentes. La combinacion optima de ambos nos permite obtenerun rendimiento maximo en el sistema completo. En la figura 3.10 se muestra enesquema de la planta de refrigeracion solar dividida en diferentes subsistemas.Donde se muestran los diferentes coeficientes de comportamiento (cop, eficienciade los colectores) que influyen en el rendimiento total del sistema (copglobal)
El planteamiento clasico para expresar el acoplamiento existente, entre elcampo solar y la maquina de absorcion, consiste en el analisis de una aproxi-macion del rendimiento total del sistema de refrigeracion solar, obtenida comoproducto del rendimiento del campo solar y el cop de la maquina de absorcion(Ajona-Maeztu 2003), (Camara-Zapata, Juan-Igualada & Perea 2004), se deno-mina COPglobal y en ocasiones COPsolar:
COPglobal = ηcolectoresCOP

Capıtulo 3. Estrategia de control y Algoritmo de Optimizacion del COP 55
Sistema de acumulación
2
Sistema de acumulación
1
Sistema auxiliar
de energía
Torre de refrigeración
Sala acondicionada
B1
Sistema de energía solar
Máquina de absorción
fan coils
B4
B6
B5
Qcol
Qac Qcal
Qcond
Qev
Qge
COP
Qsolar
COPglobal
efi
Figura 3.10: Particion del sistema de refrigeracion solar en diferentes subsistemas para
el calculo del balance energetico
Como la eficiencia de los colectores solares decrece con el aumento de la tem-peratura de los mismos. Mientras que el cop, principalmente, aumenta con elincremento de la temperatura del generador. Es necesario encontrar el punto deoperacion optimo que maximice la conversion de energıa de la radiacion solar enenergıa de refrigeracion. (Casals 2006)
Dependiendo de la configuracion de la planta, la eficiencia de los colectoresy el rendimiento de la maquina de absorcion, estaran acoplados o desacoplados.Por ejemplo si se trabaja en el modo de funcionamiento 4 (descrito en el capıtulo4), hay que tener en cuenta un compromiso entre los dos coeficientes mientrasque si operamos en los demas modos, ambos parametros seran independientes.
3.3.2. Desarrollo del algoritmo
El Algoritmo de Optimizacion del cop consiste en calcular al potencia termicanecesaria de la maquina de absorcion para satisfacer la demanda de frıo maximi-zando el rendimiento, a pesar de los cambios de la carga termica de la sala.
La potencia del generador atiende a la siguiente ecuacion de balance y energıa:
Qge = mgeCp(Tege − Tsge) (3.4)

56 3.3. Algoritmo de optimizacion del COP
Es posible alcanzar la potencia deseada variando la temperatura de entrada delgenerador o el caudal del generador. Por lo tanto el algoritmo debe proporcionarlos valores deseados de dichos valores teniendo en cuenta la demanda de frıo y elmaximo cop:
Tegedes= f(Qevdes
, Tsge, Qge, COPmax)
Qgedes= f(Qevdes
, Tsge, Tege, COPmax)
Para obtener la potencia frigorıfica deseada, nos basaremos en la ecuacion debalance de energıa, que describe la potencia frigorıfica de una maquina:
Qev = mevCp(Teev − Tsev) (3.5)
Donde Cp representa el calor especıfico del fluido calor portador, mev es elcaudal masico y Teev y Tsev las temperaturas de entrada y salida del evaporadorrespectivamente.
En la ecuacion anterior, los dos primeros terminos (mev y Cp) son conocidos ypermanecen constantes durante la operacion. La Teev aunque varıe a lo largo delexperimento es una variable de proceso conocida en cada instante. Por otro ladola Tsev varıa segun la carga termica de la sala siendo necesario que se encuentrecomprendida entre 9 y 10C para el correcto funcionamiento del fan-coil.
Si se sustituyen dichos valores de la Teev en la formula 3.5 se pueden obtenerlos valores mınimo y maximo de la potencia frigorıfica:
Qevmax = mevCp(Teev − 9)
Qevmin = mevCp(Teev − 10)
Qevmin ≤ ˙Qevdes≤ Qevmax
La franja de valores donde debe estar la potencia frigorıfica solo depende de lasvariaciones de la carga termica de la sala.
Como hay dos valores (mınimo y maximo) de la potencia frigorıfica el algorit-mo obtiene tambien dos valores (mınimo y maximo) deseados de la temperaturade entrada del generador y del caudal del generador:
Tegemin≤ Tegedes
≤ Tegemax
Qgemin≤ Qgedes
≤ Qgemax

Capıtulo 3. Estrategia de control y Algoritmo de Optimizacion del COP 57
El valor del cop depende de las condiciones de operacion de la maquina deabsorcion, se puede conocer el maximo cop que se puede alcanzar en cada ins-tante, haciendo uso de los datos proporcionados por el fabricante de la maquina,algunos de ellos se muestran en las figuras: 3.6, 3.7 y 3.8.
Con este algoritmo se puede conocer la potencia termica que hay que sumi-nistrar a la maquina de absorcion para satisfacer la demanda de frıo obteniendoel maximo rendimiento, dando lugar al consiguiente ahorro de energıa.
3.4. Conclusion
En este capıtulo se ha estudiado el problema de control de una forma generaly se ha propuesto un nuevo enfoque para el control de la planta de produccion defrıo, regulando la potencia frigorıfica con el maximo rendimiento de la maquinade absorcion. Para ello se ha desarrollado el Algoritmo de Optimizacion del cop.

58 3.4. Conclusion

Capıtulo 4
Analisis de los modos defuncionamiento de una plantasolar de frıo
La planta solar de frıo es un proceso hıbrido. Los diferentes componentes quela constituyen: el sistema solar, el sistema de energıa auxiliar y el sistema de acu-mulacion pueden trabajar simultanea o independientemente. La configuracion dela planta se puede realizar on-line manipulando las electrovalvulas y las bombas(on-off), cada una de las diferentes configuraciones se denomina modo de funcio-namiento. En este capıtulo se realiza un algoritmo para la seleccion de los modosde funcionamiento y se analiza el problema de control en cada uno de ellos.
4.1. Introduccion: modos de funcionamiento
La planta solar de frıo es un proceso hıbrido en el sentido de que posee variablesde tipo real y entero que pueden manipularse para configurar y controlar la planta.
En la figura 4.1 se presenta un esquema simplificado de la planta solar defrıo. En el se muestran las senales mas significativas. Las variables de proceso(temperaturas y caudales) se representan de color rojo, las variables manipulablesde tipo entero (electrovalvulas, bomba B4, llama de caldera y valvula de tresvıas V M3) se dibujan de color azul y por ultimo las variables manipulables reales(variador de velocidad de la bomba B1 (B1var) y la valvula de tres vıas V M3)aparecen de color verde. (Ver nomenclatura en la tabla: 2).
59

60 4.1. Introduccion: modos de funcionamiento
Sistema de acumulación
Sistema de acumulación
Sistema auxiliar
de energía
Torre de refrigeración
Sala acondicionada
VM3 B1
Sistema de energía solar
Máquina de absorción
fan coils
Tsc
Tec
Teg
Tsg
Tsev
Teev
Tac 126
Tac 126
Tac 126
Tac 126
Tetr
Tstr
203
Variables de proceso Variables manipulables ( reales ) Variables manipulables ( enteras )
Tscal
Qge
Qcal
Qcol
205 201
VM1
202
204
B4
301 206
Figura 4.1: Esquema de la planta
En la tabla 4.1 se describe el criterio utilizado en las asignacion de ceros yunos para las senales de tipo entero.
Variables Valor Descripcionelectrovalvulas 0 cerrada
1 abiertaB4 0 apagada
1 encendidaLlama de caldera 0 apagada
1 encendidaV M1 0 0 % el caudal se conduce al campo solar
1 100 % el caudal se conduce a los tanquesy/o maquina de absorcion
Cuadro 4.1: Variables manipulables enteras
Las condiciones de operacion de la planta dependen del modo de funciona-miento. Su comportamiento, debido a las limitaciones de caudales y temperatu-ras, varıa en cada punto de operacion. Por esta razon se han disenado diferentesestrategias de control atendiendo a los modos de funcionamiento.

Capıtulo 4. Analisis de los modos de funcionamiento de una planta solar de frıo 61
Los modos de funcionamiento de la planta solar estan disenados para obtenerun mayor rendimiento del equipo, dando respuesta a la demanda termica de lasala, utilizando con mayor prioridad el agua caliente proveniente del campo decolectores solares, para economizar el consumo de gas y favorecer el almacenajede agua caliente en los tanques a lo largo del dıa.
A la hora de elegir los modos de funcionamiento hay que tener en cuenta lasvariaciones en la radiacion solar. No es lo mismo trabajar en un dıa claro sinnubes, donde la radiacion sufre cambios muy suaves, que en un dıa nuboso carac-terizado por picos bruscos en la radiacion. Igualmente es necesario distinguir lasactuaciones en el control dependiendo de la tendencia, creciente o decreciente, dela radiacion. Ademas de la radiacion solar, los modos de funcionamiento dependende la temperatura del campo solar y de la temperatura de los acumuladores.
Para que la maquina de absorcion funcione correctamente (objetivo priorita-rio) es necesario suministrarle agua con una temperatura entre 75 y 100C. Peroexperimentalmente se ha comprobado que para valores superiores a 90 e inferioresa 78C, en ocasiones, la maquina deja de producir frıo. Para evitar las innecesa-rias paradas, los lımites de la temperatura de entrada del generador, desde ahoraen adelante, quedan restringidos a 78 y 90C.
En primer lugar y siempre que sea posible, se usa el agua proveniente del cam-po solar. Cuando no sea factible, se usa el agua almacenada en los acumuladoressiempre y cuando su temperatura sea mayor o igual a 80C (es necesario consi-derar perdidas de energıa en el transporte) y como ultima opcion se emplea elsistema de energıa auxiliar. En cualquier caso se utiliza el sistema de acumulacionpara almacenar la energıa termica sobrante.
Todos los modos de funcionamiento garantizan que la temperatura del aguaque llega al generador este comprendida entre el rango de valores aceptables pa-ra que la maquina de absorcion no deje de funcionar. Pero existe tambien otralimitacion con respecto al caudal del generador del equipo. Aunque en las espe-cificaciones tecnicas de la maquina de absorcion el caudal nominal del generadorse encuentra fijado en 8568 l/h (puede variar entre −5 y +10 % del valor no-minal), se ha comprobado que la maquina de absorcion puede trabajar con uncaudal comprendido entre 2000 y 9250 l/h y que para valores inferiores a 2000l/h, aunque la temperatura del generador se encuentre entre los valores correctos,la maquina de absorcion se para. Una prueba de ello se muestra en la grafica 4.2donde se pueden observar la temperatura y el caudal del generador, ası como lastemperaturas de entrada y salida del evaporador. Se aprecia como la maquina deabsorcion deja de enfriar agua cuando el caudal adquiere valores inferiores a 2000l/h, a pesar de que la temperatura del generador sea superior a 75C.

62 4.1. Introduccion: modos de funcionamiento
0.8 1 1.2 1.4 1.6 1.8
x 104
70
75
80
85
90
95
Te
mp
era
tura
ge
ne
rad
or
(ºC
)
0.8 1 1.2 1.4 1.6 1.8
x 104
20
21
22
23
24
25
Te
mp
era
tura
e
va
po
rad
or
(ºC
)
0.8 1 1.2 1.4 1.6 1.8
x 104
0100020003000400050006000700080009000
10000
segundos (22/06/06)
Ca
ud
al g
en
era
do
r (l/h
)
Figura 4.2: Comportamiento de la planta real para un caudal inferior a 2000 l/h
Los modos de funcionamiento se diferencian entre sı, fundamentalmente, porlos diferentes sistemas que se activan en cada uno de ellos: sistema de energıasolar, sistema de acumulacion, sistema de energıa auxiliar. Dentro de cada modo,la planta real se puede configurar de varias formas, algunas configuraciones son deuso forzoso por seguridad o por las propias especificaciones que se deben cumplira la hora de controlar la planta, y otras se someteran a un estudio exhaustivo decaudales y temperaturas para elegir la mas idonea para el control adecuado.
En la planta existen dos caudalımetros que permiten conocer el caudal ins-tantaneo de colectores y generador en cada momento. En cambio, no hay forma demedir la cantidad de agua que pasa a traves de los tanques. En el presente capıtu-lo se llevan a cabo diversos experimentos para obtener dicho caudal. El caudal detanques se calcula de forma diferente para cada modo de funcionamiento.
La figura 4.1 muestra una descripcion simplificada de la planta solar en la quefiguran todos los sistemas anteriormente descritos junto a las variables manipu-lables enteras y reales. Las primeras permiten configurar la planta y las segundasson utilizadas en el control de temperaturas y caudales.
A continuacion se desglosan los modos de funcionamiento:
Modo 1: Sistema de energıa auxiliar y sistema de acumulacion con equipode absorcion.
Modo 2: Sistema de energıa solar, sistema de acumulacion y sistema de

Capıtulo 4. Analisis de los modos de funcionamiento de una planta solar de frıo 63
energıa auxiliar con equipo de absorcion.
Modo 3: Sistema de energıa solar y sistema de acumulacion con equipo deabsorcion.
Modo 4: Sistema de energıa solar con equipo de absorcion.
Modo 5: Sistema de acumulacion con equipo de absorcion.
En la tabla 4.2, se muestran el valor de las electrovalvulas (0: cerrada y 1:abierta), la llama de caldera (0: apagada y 1: encendida), la valvula de tresvıas V M1 (0: el caudal se direcciona hacia los colectores (0 %) y 1: el caudalse direcciona hacia los tanques y/o maquina de absorcion (100 %)), la bombaB1 (0: apagada y 1: encendida) y por ultimo la bomba B4 (0: apagada y 1:encendida). En la descripcion de los modos de funcionamiento, estos se definen
Modos de 201 202 203 204 205 206 301 llama V M1 B1 B4
funcionamiento
Modo 1 0 0 0 0 1 1 1 1 0 1 1Modo 2 1 - 0 1 1 - 1 1 1 1 1Modo 3 1 0 - 1 - 0 - 0 1 1 1Modo 4 0 0 1 1 0 0 - 0 1 1 1Modo 5 0 0 0 1 1 1 - 0 0 1 1
Cuadro 4.2: Valores de las variables manipulables discretas en los diferentes modos
de funcionamiento
mediante los componentes que se encuentran activos, pero dentro de cada modoexiste la posibilidad de configurar la planta de diversas maneras, lo que originanuevos modos de funcionamiento. En la tabla 4.2 se muestra el guion donde existeesa posibilidad. A continuacion se desglosan los modos de funcionamiento y seaborda las diferentes configuraciones de la planta en cada uno de ellos, dichasconfiguraciones se tratan como nuevos modos de funcionamiento.
4.2. Modo 1. Sistema de energıa auxiliar y sis-
tema de acumulacion
Para obtener potencia frigorıfica se debe proporcionar al generador de lamaquina de absorcion agua con una temperatura comprendida entre 78 y 90C.Si el agua proveniente del campo solar o el agua de los tanques no alcanzan

64 4.2. Modo 1. Sistema de energıa auxiliar y sistema de acumulacion
una temperatura dentro de dicho rango, surge la necesidad de activar el apoyoenergetico de la caldera de gas natural.
El modo de operacion 1 tiene dos funciones. La primera consiste en activarel sistema de energıa auxiliar y la segunda en almacenar agua caliente en lostanques. Se activa cuando se cumplen las siguientes condiciones:
- La temperatura de salida de colectores es menor que 80C.
- La temperatura de los tanques es menor que 80C.
- La temperatura del agua de salida de los colectores es inferior a la temperaturadel agua acumulada en los tanques.
En el modo 1, normalmente la temperatura del agua de salida del generador essuperior a la temperatura de los tanques, por lo tanto el agua caliente de retornodel generador se puede aprovechar almacenandola en los acumuladores. En losmodos donde la caldera de gas esta funcionando (modos 1 y 2), por defecto, elsistema de acumulacion tambien se encuentra activo. De esta forma se logra unmejor aprovechamiento de la energıa de la caldera. Si la temperatura de salidadel generador fuera inferior a la de los tanques, las electrovalvulas 205 y 206 secierran automaticamente para prevenir el enfriamiento de los tanques.
Modos de 201 202 203 204 205 206 301 llama V M1 B1 B4
funcionamiento
1 0 0 0 0 1 1 1 1 0 1 1
Cabe destacar en este modo, que simultaneamente, el agua de los colectoressolares se recircula a traves de ellos siempre y cuando exista suficiente radiacionsolar, en este caso, donde se desea refrigerar una estancia en el horario compren-dido entre las 11:00 y las 17:30, siempre sera necesario, cuando se active estemodo, recircular agua por el campo solar.
En la figura 4.3 se muestra la planta solar de frıo con la configuracion delmodo de funcionamiento 1.1. Las lıneas rojas simulan la circulacion del agua ylas lıneas verdes representan los componentes activos del sistema.

Capıtulo 4. Analisis de los modos de funcionamiento de una planta solar de frıo 65
Sistema de acumulación
Sistema de acumulación
Sistema auxiliar
de energía
Torre de refrigeración
Sala acondicionada
VM3 B1
Sistema de energía solar
Máquina de absorción
fan coils
Teev
Tsev Tege
Tsge
Tstr
Tetr
203
201
204
206 301
205
202
B4
VM1
Figura 4.3: Modo de funcionamiento 1
4.2.1. Estudio de caudales
En cada uno de los modos de funcionamiento se lleva a cabo un estudio de loscaudales mas significativos de la planta solar de frıo que son: caudal de colectores(Qc), caudal del generador (Qge), caudal de tanques (Qac) y caudal de caldera(Qcal). Hay que destacar que la planta no posee caudalımetro para medir el caudalde los tanques. La forma de hallar el Qac depende del modo de funcionamiento dela planta. En este caso, el Qac se calcula obteniendo la diferencia entre el caudaldel generador y el caudal de caldera.
En el modo de funcionamiento 1, los caudales: Qge, Qac y Qcal se ven afectadospor la apertura de la valvula V M3 mientras que el caudal Qc solo depende delvariador de velocidad de la bomba B1 (B1var), es necesario imponer un valormınimo para el B1var, puesto que si es 0 el caudal se anularıa. El valor mınimose fija mediante la inclusion de una restriccion que indique que el caudal mınimode colectores ha de ser mayor de 800 l/h. Se ha comprobado experimentalmenteque con un valor inferior a este debido al gran retardo que existirıa entre latemperatura del agua de entrada y de salida, esta ultima tardarıa mucho mastiempo en conseguir el valor adecuado y por lo tanto se tardarıa mas tiempoen poder utilizar el agua del campo solar para ser almacenada o para hacerfuncionar la maquina de absorcion. Y ademas es mucho mas que probable que latemperatura del agua del campo solar pueda superar los 100C, pudiendo danarlos colectores solares.

66 4.2. Modo 1. Sistema de energıa auxiliar y sistema de acumulacion
En la grafica 4.4, se puede observar la dependencia que existe entre los valoresde V M3 y los caudales Qge, Qac y Qcal. Se muestran los valores reales de loscaudales y la lınea de tendencia que los modelan. Se demuestra que para losvalores entre 0-19 % de V M3, el caudal de los tanques es nulo, por lo tanto paraincluir los acumuladores en dicho modo es necesario que la valvula tenga un valorde apertura de mayor o igual a 20 %. Por otro lado si V M3 tiene un valor superiora 90 %, la caldera se apaga por seguridad (ver apendice A), puesto que la cantidadde agua que circula a traves de ella es inferior a 1500 l/h. Por consiguiente en dichomodo los tanques y la caldera participan o dejan de hacerlo automaticamentea causa de los requisitos del controlador, que manipula la valvula V M3 paraconseguir la temperatura deseada en el generador.
El caudal que pasa a traves de los tanques es proporcional al valor de aperturade la valvula V M3. Si los tanques no estan activos, es obvio que no pasa caudala traves de ellos, en cambio si estan en funcionamiento, los valores mınimo ymaximo del caudal de tanques son 800 y 8000 l/h respectivamente.
0 10 20 30 40 50 60 70 80 90 1000
2000
4000
6000
8000
10000
12000
VM3 (%)
Cau
dale
s (l/
h)
Caudal
tanques Caudal
caldera Caudal
generador
Figura 4.4: Modo 1: caudales generador, caldera y tanques
Por ultimo, el caudal del campo solar se muestra en la grafica 4.5 donde sepueden observar las variaciones de dicho caudal con respecto B1var.

Capıtulo 4. Analisis de los modos de funcionamiento de una planta solar de frıo 67
0 20 40 60 80 1000
1000
2000
3000
4000
5000
6000
7000
Variador de velocidad B1 (%)
Cau
dal d
e co
lect
ores
(l/h
)
Figura 4.5: Modo 1: caudal de colectores
4.2.2. Problema de control
En el modo de funcionamiento 1, la maquina de absorcion trabaja con laenergıa suministrada por la caldera y los tanques. Como anteriormente se hadescrito, este modo de operacion trabaja simultaneamente recirculando agua porel campo solar.
Una vez que la planta se encuentra operando en este modo, existen dos pro-blemas de control diferentes.
1. Por un lado se pretende controlar la temperatura de entrada del generador.El calculo del intervalo de valores deseados de la Tege (Tege min y Tege max)se ha descrito en el capıtulo 3. La referencia de la temperatura controladaviene dada por la media de los anteriores valores:
SP Tege =(Tege min + Tege max)
2(4.1)
La Tege se ve afectada por las variaciones en la temperatura de calderay de la temperatura de los acumuladores. El control se realiza mediante laapertura de la valvula de tres vıas V M3. La Tege debe estar restringida entrelos valores permitidos y el alcance de la la variable manipulable va desde 0 a

68 4.2. Modo 1. Sistema de energıa auxiliar y sistema de acumulacion
100 %. Es necesario, tambien, restringir la velocidad en los cambios de dichavariable para evitar un desgaste innecesario de la valvula, el incremento ydecremento de esta se encuentra limitado a 10 y −10 % respectivamente, encada instante de muestreo (Tm = 40 seg).
Por consiguiente, es necesario emplear un controlador que sea capaz de re-gular la temperatura respetando las restricciones en las variables de entraday salida, ademas de considerar las perturbaciones medibles en el control. Elcontrolador que se ha propuesto para tal efecto se describe en el capıtulosiguiente. Se trata de un controlador predictivo basado en el predictor deSmith (SPGPC) que tiene en cuenta perturbaciones medibles, incertidum-bres en el retardo y restricciones en la entrada y en la salida del proceso.
2. Por otro lado se desea regular la temperatura de salida de colectores. Lareferencia de la Tsc se fija en 80C que corresponde al mınimo valor, con-siderando perdidas en el transporte de energıa, con el cual la maquina deabsorcion puede trabajar sin riesgo de parada.
El segundo controlador debe de mantener la Tsc al valor deseado a a pesarde las variaciones en la radiacion solar y en la Tec. El control se realizamediante el variador de velocidad de la bomba B1. Las condiciones variablesde operacion conduce a cambios en la dinamica del proceso, por lo que elcontrolador mas apropiado para realizar dicho control debe ser adaptativo,de forma que sea capaz, ademas de considerar las perturbaciones medibles,de adaptarse en tiempo real a los cambios en la dinamica del proceso.
En cuanto a las restricciones de control, el caudal de colectores debe sermayor o igual a 800 l/h. El problema de control de la temperatura de salidade colectores es bastante complejo y se detalla en el capıtulo 5, donde serealiza un estudio exhaustivo de la problematica del control y se desarrollaun controlador predictivo basado en modelo con identificacion simultaneadenominado GPCC para paliar dichos problemas.
La grafica 4.6 muestra un esquema en el que se puede observar la estrategiade control propuesta para el modo de funcionamiento 1. Cada uno de los bloquesrepresenta a los diferentes controladores anteriormente mencionados.
Consideraciones
El modo 1, en un dıa soleado, se activa al principio o al final del dıa (si nohay suficiente energıa almacenada en los tanques).
No tiene sentido considerar en este modo el sistema de energıa auxiliar sin lostanques, ya que estarıamos desperdiciando energıa. De la forma en que esta con-figurada la planta, en el modo 1, se aprovecha parte de la energıa de la caldera de

Capıtulo 4. Analisis de los modos de funcionamiento de una planta solar de frıo 69
SP _ Tege MPC
( SPGPC )
VM3 (%)
Planta solar
MPC ( GPCC )
B1 (%) SP _ Tsc
Tege
Tsc
Perturbaciones
Restricciones
Qcol >=800
Ir , Tec , Tamb
Restricciones
Tege _ min <= Tege <= Tege _max 0<= VM3 <=100,
Tscal , Tac
-10<= IncVM3 <=10
Figura 4.6: Estrategia de control. Modo de funcionamiento 1
gas natural almacenandola en los tanques. El funcionamiento de estos dependedel control de la temperatura del generador, es decir, si por exigencias del con-trolador la valvula V M3 es menor que 20 %, el agua de retorno de la maquinade absorcion (Tsge) se direcciona totalmente hacia la caldera. Por otra parte, si laTsge es inferior a la Tac se impide pasar agua por los tanques, esto rara vez ocurre,de hecho, en todos los experimentos que se han realizado nunca ha ocurrido.
4.3. Modo 2. Sistema de energıa solar, sistema
de acumulacion y sistema de energıa auxi-
liar
Al igual que el modo de funcionamiento 1, el siguiente modo de operaciontiene como objetivo primordial almacenar agua caliente en los tanques, a la vezque la maquina de absorcion trabaja mediante la energıa suministrada por la

70 4.3. Modo 2. Sistema de energıa solar, sistema de acumulacion y sistema de energıa auxiliar
caldera. Esto ocurre cuando el agua de los acumuladores y el agua de salida delcampo solar no tienen temperatura suficiente como para poder prescindir de lacaldera de gas.
La diferencia fundamental entre el modo de funcionamiento 1 y 2 se reduce ala relacion existente entre la temperatura de salida de colectores y la temperaturadel agua de los tanques. Cuando la primera supera a la segunda se debe activarel modo de operacion 2, en otro caso se pone en funcionamiento el modo 1.
Por consiguiente en el modo 2 se desvıa agua caliente hacia los tanques desdedos fuentes de energıa diferentes. Desde el sistema de energıa auxiliar y desde elsistema de energıa solar. Lo que conlleva a un aumento de caudal en tanques ycomo es obvio a un aumento de temperatura de tanques en menor tiempo.
Ademas se tiene en cuenta si la temperatura de salida del generador es inferioro superior a la temperatura de los tanques. En el primer caso el sistema deacumulacion se anula para impedir que se enfrıe el agua almacenada.
La planta se encuentra en este modo cuando se dan las siguientes condiciones:
- La temperatura de salida de colectores es menor que 80C.
- La temperatura del agua de los tanques es menor que 80C.
- La temperatura del agua de salida de los colectores es mayor o igual que latemperatura del agua acumulada en los tanques.
Para alcanzar los objetivos en este modo existen dos formas de configurar la plantacon los sistemas de captadores solares, de acumulacion y de energıa auxiliar. Enambas es posible trabajar sin riesgo de parada de la maquina de absorcion. Dichasconfiguraciones se encuentran definidas en la tabla 4.3 y en las figuras 4.7 y 4.10.
Modos de 201 202 203 204 205 206 301 llama V M1 B1 B4
funcionamiento
Modo 2.1 1 1 0 0 1 1 1 1 1 1 1Modo 2.2 1 0 0 1 1 0 1 1 1 1 1
Cuadro 4.3: Modos de funcionamiento 2.1 y 2.2.
Ambas configuraciones garantizan el valor de la temperatura del generador

Capıtulo 4. Analisis de los modos de funcionamiento de una planta solar de frıo 71
deseado para que la maquina de absorcion funcione correctamente.
4.3.1. Estudio de caudales
A continuacion se muestran varias graficas que ponen de manifiesto las li-mitaciones en el caudal de colectores, caldera y generador en cada una de lasconfiguraciones. Para ello se han realizado variaciones en la velocidad de la bom-ba B1 y en la valvula de tres vıas V M3 y se han obtenido los valores de loscaudales.
1. Modo 2.1
La configuracion de la planta en el modo 2.1 se muestra en la figura 4.7.
Sistema de acumulación
Sistema de acumulación
Sistema auxiliar
de energía
Torre de refrigeración
Sala acondicionada
VM3 B1
Sistema de energía solar
Máquina de absorción
fan coils
Teev
Tsev Tege
Tsge
Tstr
Tetr
203
201
204
206 301
205
202
B4
VM1
Figura 4.7: Modo de funcionamiento 2.1
En el modo 2.1, la planta se encuentra desacoplada con respecto a las dosvariables reales manipulables: el variador de velocidad de la bomba B1 yla apertura de la valvula V M3. Los caudales del generador y de calderadependen del valor de V M3, la relacion existente entre dicha valvula y losanteriores caudales se muestra en la grafica 4.8.
El caudal de colectores solo depende del B1var. La lınea de tendencia quemodela el Qge junto a los valores reales de este se representan en la grafica4.9. El valor mınimo del caudal de colectores, al igual que en el modo 1, sefija mediante la inclusion de una restriccion.

72 4.3. Modo 2. Sistema de energıa solar, sistema de acumulacion y sistema de energıa auxiliar
0 10 20 30 40 50 60 70 80 90 1000
2000
4000
6000
8000
10000
12000
VM3 (%)
Cau
dale
s (l/
h)
Caudal
tanques Caudal
caldera Caudal
generador
Figura 4.8: Relacion entre caudales: generador, caldera y acumuladores. Modo 2.1
Los acumuladores reciben agua de dos fuentes diferentes. Por una parte elagua que circula por el campo solar se direcciona completamente hacia ellosy por otra parte el agua impulsada por la bomba B4 se divide entre la calde-ra y los acumuladores. Por lo tanto el caudal que pasa por los acumuladoressera la suma de ambas situaciones. El caudal de los acumuladores debido alcampo solar se muestra en la grafica 4.9 y el caudal de acumuladores comoconsecuencia de la bomba B4 se representa en la figura 4.8. La suma deambos sera el resultado final del caudal de tanques. Los valores mınimo ymaximos (teniendo en cuenta el sistema de acumulacion activo y la restric-cion del caudal de colectores) aproximados son, por un lado 1500− 8500 ypor otro 800− 5500 siendo la suma el resultado final, caudal mınimo 2300y caudal maximo 14000 l/h.
2. Modo 2.2 En el modo de funcionamiento 2.2, se configura la planta deforma que se trabaja con la parte superior de los tanques. Este modo solose podra activar cuando la valvula V M3 sea mayor o igual al 19 %.
En este caso, los caudales dependen de las dos variables manipulables V M3y B1var. La relacion existente entre dichas variables y los caudales del ge-nerador, caldera y colectores se muestran en las figuras: 4.11, 4.12 y 4.13respectivamente.
El caudal de tanques se obtiene realizando la diferencia entre el caudal delgenerador y el caudal de caldera. Se muestra en la grafica 4.14. Los valores

Capıtulo 4. Analisis de los modos de funcionamiento de una planta solar de frıo 73
0 20 40 60 80 1000
1000
2000
3000
4000
5000
6000
7000
B1 (%)
Qcol
ecto
res
(l/h)
Modo 1
Figura 4.9: Relacion entre caudal en colectores solares y la velocidad de la bomba B1.
Modo 2.1
Sistema de acumulación
Sistema de acumulación
Sistema auxiliar
de energía
Torre de refrigeración
Sala acondicionada
VM3 B1
Sistema de energía solar
Máquina de absorción
fan coils
Teev
Tsev Tege
Tsge
Tstr
Tetr
203
201
204
206 301
205
202
B4
VM1
Figura 4.10: Modo de funcionamiento 2.2
del caudal de tanques, considerando la restriccion del caudal de colectores,se encuentran comprendidos entre 800 y 7000 l/h aproximadamente.

74 4.3. Modo 2. Sistema de energıa solar, sistema de acumulacion y sistema de energıa auxiliar
0 10 20 30 40 50 60 70 80 906000
6500
7000
7500
8000
8500
9000
9500
10000
VM3· (%)
Cau
dal g
ener
ador
(l/h
)
B1=100% B1=80% B1=60% B1=40% B1=20% B1=0%
Figura 4.11: Modo 2.2: caudal de generador
0 10 20 30 40 50 60 70 80 900
1000
2000
3000
4000
5000
6000
7000
8000
9000
VM3 (%)
Cau
dal d
e ca
lder
a (l/
h)
B1=100% B1=80% B1=60% B1=40% B1=20% B1=0%
Figura 4.12: Modo 2.2: caudal de caldera

Capıtulo 4. Analisis de los modos de funcionamiento de una planta solar de frıo 75
0 10 20 30 40 50 60 70 80 90−1000
0
1000
2000
3000
4000
5000
6000
7000
VM3 (%)
Cau
dal d
e co
lect
ores
(l/h
)
B1=100% B1=80% B1=60% B1=40% B1=20% B1=0%
Figura 4.13: Modo 2.2: caudal de colectores
0 10 20 30 40 50 60 70 80 90−1000
0
1000
2000
3000
4000
5000
6000
7000
8000
VM3 (%)
Cau
dal d
e ta
nque
s (l/
h)
B1=100% B1=80% B1=60% B1=40% B1=20% B1=0%
Figura 4.14: Modo 2.2: caudal de tanques
4.3.2. Problema de control
4.3.2.1. Modo de funcionamiento 2.1
En este modo de operacion entran en funcionamiento los colectores solares,la caldera y los tanques de una forma desacoplada. Por un lado la maquina de

76 4.3. Modo 2. Sistema de energıa solar, sistema de acumulacion y sistema de energıa auxiliar
absorcion trabaja con la energıa suministrada por la caldera y los acumuladores ypor otro lado los colectores se encargan de almacenar agua caliente en los tanques.Por consiguiente la planta se puede ver como dos subsitemas que trabajan de unaforma desacoplada.
El modo de funcionamiento 2.1 solo se diferencia del modo 1 en que la aperturade la valvula V M1 en el primero tiene un valor de 100 % (todo el agua del campode colectores se conduce hacia los tanques) y en el segundo de 0 % (el agua delos colectores solares se recircula hacia ellos de nuevo). Por lo tanto la estrategiade control del modo de funcionamiento 2.1 se considera igual que la del modo 1,la referencia de Tsc se fija al valor de 80C. La eficiencia de los colectores solares(ver capıtulo 3) se restringe mediante el mınimo valor de Tsc necesario para quela maquina de absorcion pueda trabajar con colectores y ası poder prescindir delsistema de energıa auxiliar. El controlador usado para controlar la Tsc es gpcc(ver capıtulo 5). Notese que aunque la configuracion de la planta haya cambiado,en este modo la Tec se corresponde con la temperatura de salida de tanques, seutiliza el mismo controlador, al ser este adaptativo y considerar perturbacionesmedibles se ajusta a los cambios en la dinamica del sistema. En cuanto al control
SP _ Tege MPC
( SPGPC )
VM3 (%)
Planta solar
MPC ( GPCC )
B1 (%) SP _ Tsc
Tege
Tsc
Perturbaciones Ir , Tec , Tamb
Restricciones
Tege _ min <= Tege <= Tege _max 0<= VM3 <=100,
Tscal , Tac
-10<= IncVM3 <=10
Figura 4.15: Estrategia de control. Modo de funcionamiento 2.1
de la Tege, la referencia de dicha temperatura se calcula de forma similar al modo1 (ver ecuacion 4.1) y el controlador empleado para su control es el denominadospgpc (detallado en el capıtulo 6). El esquema de la estrategia de control del

Capıtulo 4. Analisis de los modos de funcionamiento de una planta solar de frıo 77
modo 2.1 se puede ver en la grafica 4.15.
4.3.2.2. Modo de funcionamiento 2.2
En el modo 2.2 el sistema se encuentra acoplado, las temperaturas que sedesean controlar (Tsc y Tege), dependen de las dos variables manipulables: B1var
y V M3.
La referencia de la Tsc es de 80C y la referencia de la Tsc viene dada por laecuacion 4.1, igual que en los modos anteriores.
El control de ambas temperaturas se lleva a cabo mediante los controlado-res anteriormente citados: gpc y spgpc. La estrategia de control del modo 2.2coincide con la del modo 2.1, ver figura 4.15.
Consideraciones
Aunque en el modo 2.1 el caudal de tanques sea superior al caudal de tanquesdel modo 2.2, hay que tener en cuenta que en el primer modo, la Tsc es inferiora la Tsc del segundo, puesto que en el modo 2.1, la temperatura de entrada a loscolectores, en la mayorıa de los casos, coincide con la temperatura de los tanques(concretamente de la parte baja de los tanques, donde se encuentra el agua masfrıa). Y en el modo 2.2, la Tsc es la misma que la Tsge (sin considerar perdidastermicas). Como consecuencias directas de la comparacion de dichos modos, sepodrıa resumir diciendo que:
Con el modo 2.1 se tarda mas tiempo en alcanzar la temperatura adecuadapara poder prescindir del sistema de energıa auxiliar, de forma que el consumode gas natural es mas elevado pero es necesario tenerlo en cuenta porque, en elmodo 2.2 cabe la posibilidad de que el caudal de colectores se anule, esto ocurrecuando B1var = 0 y V M3 < 19 %.
Por lo tanto, cuando se active el modo 2, y B1var 6= 0 y V M3 >= 19 % seda prioridad al modo 2.2. En el caso de que este no pueda activarse se cambiaal modo 2.1. En la figura 4.16 se muestra una parte del diagrama de flujo que seemplea para la seleccion de modos de funcionamiento, con el objeto de destacarla activacion de los modos 2.1 y 2.2.

78 4.4. Modo 3. Sistema de energıa solar y sistema de acumulacion
Tac <80
si
modo =2.2
si
B1 ! =0 y VM3 >=19
no
modo =2.1
... no
...
...
...
Tsc <80
si
Tsc >= Tac
si
... no
... no
Figura 4.16: Detalle del diagrama de flujo para la seleccion de modo de funcionamento
2.1 y 2.2
4.4. Modo 3. Sistema de energıa solar y sistema
de acumulacion
El objetivo del modo de operacion 3 consiste en almacenar agua caliente enlos tanques ademas de suministrar energıa a la maquina de absorcion provenientedel campo solar y de los acumuladores. La principal diferencia con respecto a losmodos anteriores radica en que el sistema de energıa auxiliar queda anulado.
Para que se active el modo 3 se debe cumplir lo siguiente:
- La temperatura del agua de salida de colectores es mayor o igual que la de lostanques y
- La temperatura de salida de colectores es mayor o igual que 80C o
- La temperatura de tanques es mayor que 80C.

Capıtulo 4. Analisis de los modos de funcionamiento de una planta solar de frıo 79
Al igual que en el modo 2 tambien existen muchas formas de configurar laplanta. En la tabla 4.4 se pueden apreciar todas las configuraciones posibles.Algunas son de uso obligatorio por seguridad de la caldera (ver apendice A). Enotras se debe llevar a cabo estudios de las variables de proceso mas importantes dela planta para observar el comportamiento de la misma. Ası se consigue obtenercomparaciones equitativas entre las distintas configuraciones con el fin de poderelegir entre ellas.
Modos de 201 202 203 204 205 206 301 llama V M1 B1 B4
funcionamiento
Modo 3.1 1 0 1 1 1 0 1 0 1 1 1Modo 3.2 1 0 0 1 1 0 0 0 1 1 1Modo 3.3 1 0 1 1 1 0 0 0 1 1 1Modo 3.4 1 1 1 1 0 0 0 0 1 1 1
Cuadro 4.4: Configuraciones de la planta solar en el modo de funcionamiento 3
4.4.1. Estudio de caudales
1. Modo 3.1
La configuracion 3.1, se ha elegido por motivos de seguridad de la caldera degas (ver apendice A). Cuando la caldera ha estado funcionando y se deseaapagar, para evitar su deterioro, se debe seguir recirculando agua por suinterior (con la llama apagada) hasta que la temperatura del agua desciendahasta 75C. El esquema de la planta con la configuracion del modo 3.1 semuestra en la grafica 4.17. En dicho modo, el caudal de caldera no debealcanzar nunca los 1500 l/h. Para que la llama permanezca encendida esnecesario superar los 1500 l/h (valor fijado en la secuencia de seguridadde caldera (ver apendice A)). Con el objeto de calcular los caudales delgenerador y de colectores, se ha programado un pi que mantiene el caudalde caldera a 1400 l/h (ası se garantiza que la llama no se encienda) mediantela valvula V M3, a su vez, se variado el B1var en todo su rango de valores(de 0 a 100 %) y se han obtenido los caudales. El resultado se muestraen la grafica 4.18. El caudal de tanques no interesa en este modo, puestoque cuando se activa se hace por motivos de seguridad de la caldera (verapendice A), no hace falta un estudio que indique la cantidad de agua quepasa a traves de ellos para elegir este modo o rechazarlo.
2. Modo 3.2
En el modo 3.2 se anula el sistema de energıa auxiliar, impidiendo queel agua circule a traves de la caldera. En la grafica 4.19 se muestra la

80 4.4. Modo 3. Sistema de energıa solar y sistema de acumulacion
Sistema de acumulación
Sistema de acumulación
Sistema auxiliar
de energía
B4
Torre de refrigeración
Sala acondicionada
204
201
202
203
205
206 301
VM1
VM3 B1
Sistema de energía solar
Máquina de absorción
fan coils
Teev
Tsev Tege
Tsge
Tstr
Tetr
Figura 4.17: Modo de funcionamiento 3.1
0 10 20 30 40 50 60 70 80 90 1004500
5000
5500
6000
6500
7000
7500
8000
8500
9000Modo 3.1
B1(%)
Ca
ud
ale
s (
l/h
)
Caudal generadorCaudal colectores
Figura 4.18: Caudales modo 3.1
configuracion de la planta en dicho modo. Los valores de los caudales decolectores y del generador (son casi similares, la diferencia entre ellos sedesprecia y se consideran iguales) se representan en la figura 4.20. En elmodo 3.2, el caudal que pasa a traves de los tanques, es igual al caudal delgenerador.
3. Modo 3.3
En este caso, la planta queda configurada como se observa en la grafica4.21. A traves de la caldera no pasa caudal, los valores de los caudales de

Capıtulo 4. Analisis de los modos de funcionamiento de una planta solar de frıo 81
Sistema de acumulación
Sistema de acumulación
Sistema auxiliar
de energía
B4
Torre de refrigeración
Sala acondicionada
204
201
202
203
205
206 301
VM1
VM3 B1
Sistema de energía solar
Máquina de absorción
fan coils
Teev
Tsev Tege
Tsge
Tstr
Tetr
Figura 4.19: Modo de funcionamiento 3.2
0 10 20 30 40 50 60 70 80 90 1002000
3000
4000
5000
6000
7000
8000Modo3.2
Cau
dal g
ener
ador
y
caud
al tn
aque
s (l/
h)
0 10 20 30 40 50 60 70 80 90 1002000
3000
4000
5000
6000
7000
8000
VM3 (%)
Cau
dal c
olec
tore
s (l/
h)
B1=100% B1=80% B1=60% B1=40% B1=20% B1=0%
Figura 4.20: Caudales modo 3.2
colectores y del generador con respecto a variaciones en la valvula V M3, (ladiferencia entres los anteriores caudales es despreciables) y en la velocidadde la bomba B1 se pueden ver en la figura 4.22.
Para calcular el caudal de agua que pasa a traves de los tanques se hanllevado a cabo dos experimentos. En ambos, se trata de obtener el tiempo

82 4.4. Modo 3. Sistema de energıa solar y sistema de acumulacion
Sistema de acumulación
Sistema de acumulación
Sistema auxiliar
de energía
B4
Torre de refrigeración
Sala acondicionada
204
201
202
203
205
206 301
VM1
VM3 B1
Sistema de energía solar
Máquina de absorción
fan coils
Teev
Tsev Tege
Tsge
Tstr
Tetr
Figura 4.21: Modo de funcionamiento 3.3
0 10 20 30 40 50 60 70 80 90 1003000
3500
4000
4500
5000
5500
6000
6500
7000
7500
8000
VM3 (%)
Cau
dale
s: g
ener
ador
y c
olec
tore
s (l/
h)
Modo 3.3
B1=100%B1=80%B1=60%B1=40%B1=20%B1=0%
Figura 4.22: Caudales modo 3.3
que tardan los acumuladores en cambiar de temperatura. De esta manerase hallan los litros de agua que circulan por ellos en una hora.
Dentro de los acumuladores, el agua caliente tiende a subir y se encuentraestratificada por temperatura. Es decir, el agua mas caliente se situa en laparte superior de los tanques y el agua frıa en la parte inferior.

Capıtulo 4. Analisis de los modos de funcionamiento de una planta solar de frıo 83
Por esta razon, el tiempo que tarda la temperatura del agua de los tanquesen cambiar es diferente si el agua que entra en ellos esta mas frıa o mascaliente que el agua acumulada en los mismos. No obstante, con ambosexperimentos se demuestra, como veremos a continuacion, que con el modode funcionamiento 3.3 se puede almacenar agua caliente en el sistema deacumulacion.
El primer experimento consiste en hacer circular agua frıa por los tanquescon estos llenos de agua caliente. En el segundo se hace justamente lo contra-rio, la temperatura del agua proveniente de los colectores solares es superiora la temperatura del agua almacenada.
En el primer estudio se ha configurado la planta solar en el modo 3.3, convalores fijos en la velocidad de B1 y en la valvula V M3 de 100 y 50 % res-pectivamente. La duracion del experimento es de 15 horas y se ha elegido unmomento del dıa donde no existıa radiacion solar alguna, con una tempera-tura de tanques de 40C y con 20C de temperatura en salida de colectores.Se trata de calcular el tiempo que tardan los tanques en llenarse de aguafrıa, para ello se ha obtenido el tiempo desde que comienza el experimentohasta que la temperatura de salida de los tanques (se fija la atencion enlas temperaturas de salida 126 y 128, ya que en esta configuracion el aguade los tanques se extrae por arriba) empieza a descender y el resultado hasido de tres horas aproximadamente (ver figura 4.24). Como los tanquesalmacenan 2500 l cada uno, el caudal que pasa a traves de ellos es de 1666l/h.
El segundo experimento se ha realizado a lo largo de seis hora de duracion.Al inicio, el agua almacenada en los tanques tiene una temperatura de 31Cmientras que la referente al agua proveniente de los colectores solares es de39,6C. Esta ultima llega a alcanzar valores de hasta 83,6C a lo largo delensayo. Se han fijado los valores de la apertura de la valvula VM3 y delvariador de velocidad de la bomba B1 en 50 %.
En la grafica 4.24 se puede observar que las temperaturas de salida de lostanques (126 y 128, las temperaturas que realmente importan, puesto queel agua de salida de los tanques va directamente a la maquina de absorcion)comienzan a subir desde el principio del experimento siendo el retardo des-preciable, se podrıa indicar que el caudal de tanques es mayor o igual a 5000l/h. Se puede observar que las temperaturas Tac 126 y Tac 128 incrementansu valor hasta 20C al final del experimento.
Con ambos estudios se demuestra que en el presente modo de operacion elagua proveniente de los colectores solares se distribuye a traves del genera-dor y del sistema de acumulacion. Por lo tanto es posible almacenar aguacaliente en los tanques.
4. Modo 3.4

84 4.4. Modo 3. Sistema de energıa solar y sistema de acumulacion
2000 3000 4000 5000 6000 7000 8000 9000 10000 11000 1200020
25
30
35
40
45Experimento I para averiguar el caudal de tanques en el modo 3.3
Tem
pera
tura
s (º
C)
2000 3000 4000 5000 6000 7000 8000 9000 10000 11000 120000
5
10
15
20
25
Tm=5seg
hora
s
Tac_126 Tac_128 Tac_121 Tac_122 Tsc Tec
Figura 4.23: Experimento I, caudal de tanques en el modo 3.3
0.96 0.98 1 1.02 1.04 1.06 1.08 1.1 1.12 1.14
x 104
20
30
40
50
60
70
80
85Experimento II para averiguar el caudal de tanques en el modo 3.3
Tm= 5 seg
Tem
pera
tura
s (º
C)
Tac_T126 Tac_128 Tsc
Figura 4.24: Experimento II, caudal de tanques en el modo 3.3
En el modo 3.4, la planta se encuentra configurada como se muestra en lafigura 4.25. El caudal de caldera es nulo y los valores de los caudales decolectores y del generador se muestran en la grafica 4.26. En principio la

Capıtulo 4. Analisis de los modos de funcionamiento de una planta solar de frıo 85
Sistema de acumulación
Sistema de acumulación
Sistema auxiliar
de energía
Torre de refrigeración
Sala acondicionada
VM3 B1
Sistema de energía solar
Máquina de absorción
fan coils
Teev
Tsev Tege
Tsge
Tstr
Tetr
203
201
204
206 301
205
202
B4
VM1
Figura 4.25: Modo de funcionamiento 3.4
diferencia entre el modo 3.3 y el modo 3.4 es casi despreciable con respectoa los caudales anteriores, veamos que ocurre con el caudal de tanques. Para
0 10 20 30 40 50 60 70 80 90 1003000
4000
5000
6000
7000
8000Modo 3.4
Ca
ud
al g
en
era
do
r(l/h
)
0 10 20 30 40 50 60 70 80 90 1003000
4000
5000
6000
7000
8000
VM3(%)
Ca
ud
al co
lecto
res(l/h
)
B1=100% B1=80% B1=60% B1=40% B1=20% B1=0%
Figura 4.26: Relacion entre el caudal de colectores solares y B1. Modo 3.4
calcular el caudal de tanques se han llevado a cabo los mismos experimentosque en el modo 3.3.
Se ha configurado la planta en el modo 3.4 con valores constantes de lavelocidad de B1 y de V M3 de 100 y 50 % respectivamente. La duracion del

86 4.4. Modo 3. Sistema de energıa solar y sistema de acumulacion
experimento es de 14 horas y a lo largo de el no existe radiacion solar. Separte de unos valores de temperatura de 22C y de 40C en la salida decolectores y en los tanques respectivamente.
El experimento demuestra que con el modo de funcionamiento 3.4 no pasacaudal por los tanques. Es decir, si pasara agua, los tanques al final delexperimento deberıan alcanzar un valor aproximado al valor de la tempera-tura de salida de colectores (ver 4.27) sin embargo, permanecen a lo largo detodo el trabajo con una temperatura similar a la de inicio, (los dos gradosque bajan se deben al enfriamiento debido a la temperatura ambiente quebaja durante la noche).
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
20
25
30
35
40
Experimento I para averiguar el caudal de tanques en el modo 3.4
Tem
pera
tura
s (º
C)
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
5
10
15
20
25
Tm=5seg
hora
s
Tac_126 Tac_128 Tac_121 Tac_122 Tec Tsc
Figura 4.27: Experimento I, caudal de tanques en el modo 3.4
El segundo experimento se ha ejecutado durante ocho horas. Al principio,los valores de las temperaturas del agua almacenada en los tanques y lade salida de colectores solares son de 32C y 33C respectivamente. Latemperatura del agua salida de colectores llega a alcanzar valores de hasta86C. Se han fijado los valores de la apertura de la valvula V M3 y delvariador de velocidad de la bomba B1 en 50 %.
Como se puede observar en la grafica 4.28, los valores de las temperaturasde salida de los tanques permanecen constantes durante las ocho horasde duracion del experimento, a pesar de que el agua proveniente de loscolectores solares es superior a las anteriores en todo momento.
De esta forma y con ambos experimentos se demuestra que con el modo defuncionamiento 3.4 el agua del sistema de energıa solar se direcciona en sutotalidad hacia el generador de la maquina de absorcion, debido al propiodiseno de la planta. Siendo el caudal de los tanques nulo.

Capıtulo 4. Analisis de los modos de funcionamiento de una planta solar de frıo 87
500 1000 1500 2000 2500 300020
30
40
50
60
70
80
88Experimento II para averiguar el caudal de tanques en el modo 3.4
Tm= 5 seg
Tem
pera
tura
s (º
C)
Tac_126 Tac_128 Tsc
Figura 4.28: Experimento II, caudal de tanques en el modo 3.4
Por consiguiente con este modo de funcionamiento no se pueden llenar lostanques de agua caliente. De manera que dicho modo se desprecia y no seutiliza para el control de la planta. En su lugar se usa el modo de funcio-namiento 3.3.
4.4.2. Problema de control
4.4.2.1. Modo de funcionamiento 3.1
Como ya se ha mencionado anteriormente el modo 3.1 surge de la secuenciade seguridad de la caldera de gas natural (ver apendice A). Es un modo untanto especial, en el no se garantiza el rendimiento maximo de la planta, y si seactiva sera por un perıodo de tiempo muy corto. Mientras la planta se encuentrefuncionando en dicho modo, el valor del caudal de la caldera debe mantenerse enel valor de 1400 l/h mediante un pi que actua sobre la valvula V M3. A su vez,otro controlador regula la temperatura de salida de colectores (gpcc) medianteel variador de velocidad de la bomba B1.
En la grafica 4.29 se puede observar un esquema muy simplificado de la estra-tegia de control aplicada a la planta mientras esta trabaja en el modo de operacion3.1.

88 4.4. Modo 3. Sistema de energıa solar y sistema de acumulacion
VM3 (%)
Planta solar
MPC ( GPCC )
B1 (%)
SP _ Tsc = SP _ Tge + cte
Tsc
Perturbaciones
PI SP _ Qcal =1400 l /h
Qcal
Ir , Tec , Tamb
Figura 4.29: Estrategia de control. Modo de funcionamiento 3.1.
En este modo es imposible garantizar el maximo rendimiento de la planta,no obstante, la obtencion de la referencia de la Tsc, se sigue realizando como sedetalla en el capıtulo 3. Se da el mınimo valor posible, para garantizar que lamaquina de absorcion no se pare, mas una constante debida a las perdidas deenergıa.
4.4.2.2. Modo de funcionamiento 3.2 y 3.3
Cuando la planta opera en los modos 3.2 y 3.3, es imposible controlar la tem-peratura del generador, puesto que o bien, coincide con la temperatura de losacumuladores o bien es una mezcla del agua de los tanques con el agua que pro-viene del campo solar. Ambos valores no se pueden controlar mediante ningunade las variables manipulables. Por consiguiente en el presente modo de funciona-miento se llega a lograr los objetivos de control mediante el control del caudal delgenerador.
La referencia optima del caudal del generador que permite alcanzar el maximoCOP, se calcula mediante la obtencion del intervalo de valores deseados del Qege
(Qege min y Qege max) como se ha descrito en el capıtulo 3. La referencia delcaudal viene dada por la media de los anteriores valores:
SP Qege =(Qege min + Qege max)
2(4.2)
Se debe llevar el caudal del generador al valor deseado. Las variables manipu-

Capıtulo 4. Analisis de los modos de funcionamiento de una planta solar de frıo 89
ladas V M3 y el variador de velocidad de la bomba B1, alteran de una maneraacoplada el valor del caudal en el generador. Es necesario, por tanto, variar ambassenales para alcanzar el valor del caudal deseado. En otra palabras, nos encon-tramos con un problema de control donde existe una variable controlada y dosmanipulables, cada una de las variables manipulables afectan a la variable contro-lada y ademas existe un orden de prioridad en el uso de las variables manipulables.Para obtener un mayor ahorro energetico, de entre todos los valores posibles seelige la mınima velocidad de la bomba B1. Para este tipo de problema existeun conocido controlador denominado control de gama partida (cgp) (split game)(Ollero & Camacho 1997).
El comportamiento del controlador de gama partida es el siguiente: primerocalcula el valor mınimo del variador de la bomba B1 y posteriormente conduceel caudal al valor dado por la referencia, mediante un controlador pi que actuasobre la apertura de la valvula V M3.
El esquema de control adoptado para los modos de funcionamiento 3.2 y 3.3 esel mismo, no obstante, los niveles del caudal difieren entre ambos modos (4.30).
VM3 (%)
Planta solar
Controlador de gama partida
B1 (%) SP _ Qge
Qge
Figura 4.30: Estrategia de control. Modo de funcionamiento 3.2 y 3.3
En la figura 4.31 se pone de manifiesto la relacion que existe entre el caudalen el generador y las variables manipulables: V M3 y el variador de velocidad deLa bomba B1 en el modo de funcionamiento 3.2.
Una vez conocido el valor del caudal que se desea conseguir, se fija la mınimavelocidad de la bomba B1 y posteriormente se utiliza un controlador clasico pique mediante variaciones en la apertura de la valvula V M3 ajusta el caudal delgenerador al valor referenciado.

90 4.4. Modo 3. Sistema de energıa solar y sistema de acumulacion
020
4060
80100
020
4060
80100
3000
4000
5000
6000
7000
8000
VM3(%)
Modo 3.2
B1(%)
Cau
dal (
l/h)
3500
4000
4500
5000
5500
6000
6500
7000
Figura 4.31: Caudal modo 3.2 versus B1 y Vm3
Consideraciones
El modo de funcionamiento 3 se puede resumir de la siguiente manera.
Cuando se activa el modo 3 y la temperatura de caldera es mayor a 75C, sefuerza a la planta trabajar en el modo 3.1.
El modo 3.4 se rechaza debido a que el caudal de los acumuladores es nulo.
Una vez que descienda la temperatura del agua de la caldera y se puedadesactivar el modo 3.1, se puede elegir entre los modos 3.2 y 3.3. Con el modo3.2 se tarda menos tiempo en calentar los tanques que con el modo 3.3, puestoque el caudal de tanques es superior en el primer modo que en el segundo. Peroexiste una limitacion en el uso del modo 3.2 y es que cuando la temperatura detanques sea inferior a 80C no es posible activarlo, puesto que en dicho modo lamaquina de absorcion trabaja con la energıa que les proporcionan los tanques,y por exigencias del funcionamiento de esta, es necesario que el agua supere esatemperatura.

Capıtulo 4. Analisis de los modos de funcionamiento de una planta solar de frıo 91
A continuacion se muestra en la figura 4.32 una parte del diagrama de flujoempleado para seleccionar los modos de funcionamiento, donde se destaca laeleccion de los modos 3.1, 3.2 y 3.3.
Tk <75
no
si
modo =31 modo =33
Tac <80
Tsc <80
si
si
no
no Tsc >= Tac
si
no
Tcal <75
modo =32
no
si
...
...
...
...
...
...
Figura 4.32: Diagrama de flujo parcial para la seleccion de modos de funcionamiento
3.1, 3.2 y 3.3
4.5. Modo 4. Sistema de energıa solar
En el modo de operacion 4, la maquina de absorcion trabaja junto al sistemade captacion solar. Se anulan los sistemas de energıa auxiliar y de acumulacion.Se activa cuando la energıa proveniente de los colectores solares es la justa paratrabajar con el equipo de absorcion, en dicho modo no se tiene la posibilidad dealmacenar la energıa.

92 4.5. Modo 4. Sistema de energıa solar
Si no existieran los sistemas de acumulacion ni de energıa auxiliar, este mo-do serıa el unico con el que la planta solar podrıa trabajar. Su funcionamientoesta sujeto a la radiacion solar.
El modo de funcionamiento 4 se activa siempre que se cumpla lo siguiente:
- La temperatura del agua de salida de colectores solares es mayor o igual que80C.
- O ademas de lo anterior, la temperatura de salida de colectores es menor quela de los tanques.
A continuacion, en la tabla 4.5 se presentan las diferentes configuraciones dela planta para el modo de funcionamiento 4:
Modos de 201 202 203 204 205 206 301 llama V M1 B1 B4
funcionamiento
Modo 4.1 0 0 1 1 0 0 1 0 1 1 1Modo 4.2 0 0 1 1 0 0 0 0 1 1 1
Cuadro 4.5: Configuraciones de la planta solar en el modo de funcionamiento 4
Ambas configuraciones se deben usar, la primera en el caso de que la tempe-ratura de caldera sea mayor o igual a 75C (seguridad de caldera (ver apendiceA)). Y la segunda en caso contrario. En las dos, la totalidad del agua que saledel campo solar se enfrenta con la maquina de absorcion.
4.5.1. Estudio de caudales
Modo 4.1
La configuracion de la planta empleada en en modo 4.1 se muestra en lagrafica 4.33.
El modo de operacion 4.1, ademas de conducir el agua de colectores haciael generador del equipo de absorcion debe enfriar el agua que pasa a travesde la caldera. Ya se comento anteriormente (en el modo 3.1) que la calderade gas natural debe cumplir una secuencia de seguridad programada paratal efecto (ver apendice A).

Capıtulo 4. Analisis de los modos de funcionamiento de una planta solar de frıo 93
Sistema de acumulación
Sistema de acumulación
Sistema auxiliar
de energía
Torre de refrigeración
Sala acondicionada
VM3 B1
Sistema de energía solar
Máquina de absorción
fan coils
Teev
Tsev Tege
Tsge
Tstr
Tetr
203
201
204
206 301
205
202
B4
VM1
Figura 4.33: Modo de funcionamiento 4.1
Dicha secuencia apaga la llama cuando el caudal de caldera es menor que1500 l/h y no permite que quede agua estancada en su interior con unatemperatura mayor de 75C para evitar su deterioro. Por lo tanto es ne-cesario disponer de modos de funcionamiento (por ejemplo los modos 3.1,4.1 y como veremos mas adelante el modo 5.1) que cumplan ese requisito.En dichos modos no se utiliza el sistema de energıa auxiliar y se activan siel modo precedente ha utilizado la caldera y su temperatura es mayor que75C.
Para la obtencion de los caudales del generador y de colectores se ha man-tenido el caudal de caldera a 1400 l/h mediante un pi programado para talefecto. Mientras que el pi manipula la valvula V M3 se han dado valoresal variador de velocidad de B1 desde 0 a 100 % con objeto de obtener loscaudales de colectores y generador. Los resultados se muestran en la grafica4.34. En el modo 4.1, como es obvio, el caudal caudal de los tanques es nulo.
Modo 4.2
La configuracion de la planta en el modo 4.2 se muestra en la figura 4.35.
Si se activa el modo 4 y la temperatura de salida de caldera es inferior a75C entra en funcionamiento el modo 4.2. En dicho modo tanto el caudalde tanques como el caudal de caldera es nulo. En cambio los valores de loscaudales de colectores y del generador se encuentran comprendidos entre3000 y 7800 l/h, su diferencia es despreciable, por lo que los consideraremosiguales. En la grafica 4.36 se muestra la evolucion de dichos caudales juntoa los valores del variador de velocidad de B1.

94 4.5. Modo 4. Sistema de energıa solar
0 10 20 30 40 50 60 70 80 90 1004500
5000
5500
6000
6500
7000
7500
8000
8500
9000
Variador de velocidad de B1(%)
Cau
dale
s (l/
h)
Modo 4.1
QgenQcol
Figura 4.34: Caudales en modo de funcionamiento 4.1
Sistema de acumulación
Sistema de acumulación
Sistema auxiliar
de energía
Torre de refrigeración
Sala acondicionada
VM3 B1
Sistema de energía solar
Máquina de absorción
fan coils
Teev
Tsev Tege
Tsge
Tstr
Tetr
203
201
204
206 301
205
202
B4
VM1
Figura 4.35: Modo de funcionamiento 4.2
4.5.2. Problema de control
4.5.2.1. Modo de funcionamiento 4.1
El modo 4.1 se activa si el agua que circula por el interior de la caldera essuperior o igual a 75C. La idea principal consiste en hacer circular agua por

Capıtulo 4. Analisis de los modos de funcionamiento de una planta solar de frıo 95
0 10 20 30 40 50 60 70 80 90 1003000
4000
5000
6000
7000
8000
Ca
ud
al g
en
era
do
r (l/h
)
Modo 4.2
0 10 20 30 40 50 60 70 80 90 1003000
4000
5000
6000
7000
8000
VM3 (%)
Ca
ud
al c
ole
cto
res
(l/h
)
B1(100) B1(80) B1(60) B1(40) B1(20) B1(0)
Figura 4.36: Caudales en modo de funcionamiento 4.2
el interior de la caldera sin prender la llama con el objeto de enfriar el agua delinterior de la misma. Como la llama se enciende si el caudal supera los 1500 l/h. Seutiliza un pi que regula el caudal de la caldera mediante la variable manipulableV M3. La referencia se fija en 1400 l/h (para mantener la llama apagada).
Mientras que el pi regula el caudal de caldera, el controlador gpcc controlala temperatura de salida de colectores. Su referencia viene dada por el algoritmodesarrollado en el capıtulo 3.
La estrategia de control adoptada en este modo se representa en el esquema4.37
4.5.2.2. Modo de funcionamiento 4.2
El modo 4.2 es el unico de todos los modos de operacion en el que la maquinade absorcion opera con el agua que proviene directamente del campo solar. Latemperatura de salida de colectores es la misma que la temperatura de entradaal generador menos una constante (de aproximadamente 2C) debida a perdidasdel transporte de energıa. Por consiguiente es posible el control de la temperaturadel generador, mediante el control de la temperatura de salida de colectores.
En este caso, existen dos variables de manipulacion (V M3 y B1) y una va-riable controlada (temperatura de salida de colectores). Una vez que se calculala referencia de la temperatura de colectores, mediante el controlador gpcc se

96 4.5. Modo 4. Sistema de energıa solar
VM3 (%)
Planta solar
MPC ( GPCC )
B1 (%)
SP _ Tsc = SP _ Tge + cte
Tsc
Perturbaciones
PI SP _ Qcal =1400 l /h
Qcal
Ir , Tec , Tamb
Restricciones
Tsc _ min <= Tege <= Tsc _max
Figura 4.37: Estrategia de control. Modo de funcionamiento 4.1
conoce el valor deseado del caudal del campo solar. Para alcanzar su valor, seaplica un controlador de gama partida. Donde primero se calcula el mınimo valordel variador de velocidad de B1, y despues se controla el caudal de colectoresmediante un controlador pi que actua sobre la apertura de la valvula V M3. Elesquema de la estrategia de control se muestra en la grafica: 4.38.
VM3 (%)
Planta solar
MPC ( GPCC )
B1 (%)
SP _ Tsc = SP _ Tge + cte
Tsc
Perturbaciones
Restricciones
Controlador de gama partida
Ir , Tec , Tamb
Tsc _ min <= Teg <= Tsc _max
Figura 4.38: Estrategia de control. Modo de funcionamiento 4.2

Capıtulo 4. Analisis de los modos de funcionamiento de una planta solar de frıo 97
4.6. Modo 5. Sistema de acumulacion
El modo de funcionamiento 5 esta pensado para utilizar el agua caliente alma-cenada en los tanques con el equipo de absorcion. Solo se activa si no hay energıasuficiente proveniente de los colectores y la temperatura del agua de los tanqueses lo bastante elevada como para hacer que funcione el equipo de absorcion.
Los demas sistemas no se encuentran activos. Para asegurar que la maquinade absorcion no deje de enfriar, la temperatura del agua almacenada debe serigual o mayor a 80C teniendo en cuenta las perdidas de energıa en el transporte.
Dicho modo se activa cuando ocurre los siguientes eventos:
- La temperatura del agua de salida de colectores solares es menor que 80C.
- La temperatura del agua de los tanques es mayor o igual que 80C.
El modo 5 se puede configurar en la planta de dos formas deferentes (4.6).
Modos de 201 202 203 204 205 206 301 llama V M1 B1 B4
funcionamiento
Modo 5.1 0 0 0 0 1 1 1 0 0 1 1Modo 5.2 0 0 0 0 1 1 0 0 0 1 1
Cuadro 4.6: Configuraciones de la planta solar en el modo de funcionamiento 5
Simultaneamente, siempre que haya radiacion suficiente, se recircula agua porlos colectores solares, como en el modo de funcionamiento 1.
4.6.1. Estudio de caudales
Modo 5.1
En la figura 4.39 se representa un esquema de la instalacion con la configu-racion del modo 5.1.
Cuando se trabaja solo con los tanques el modo de funcionamiento activo esel modo 5.2. Pero si la temperatura del agua de la caldera supera los 75Cse activa el mod 5.1 que fuerza el paso del agua a traves de la caldera con el

98 4.6. Modo 5. Sistema de acumulacion
Sistema de acumulación
Sistema de acumulación
Sistema auxiliar
de energía
Torre de refrigeración
Sala acondicionada
VM3 B1
Sistema de energía solar
Máquina de absorción
fan coils
Teev
Tsev Tege
Tsge
Tstr
Tetr
203
201
204
206 301
205
202
B4
VM1
Figura 4.39: Modo de funcionamiento 5.1
objetivo de evitar el incremento de temperatura, debido a la inercia termica,del agua de su interior. Para ello se ha programado un pid que mantiene elcaudal de caldera en el valor de 1400 l/h (para evitar el funcionamiento dela llama). La grafica 4.40 muestra el estudio del caudal de tanques el modo5.1.
0 20 40 60 80 1003000
3500
4000
4500
5000
5500
6000
6500
7000
7500
VM3 (%)
Cau
dal t
anqu
es (
l/h)
Figura 4.40: Modo 5.1. Caudal del generador

Capıtulo 4. Analisis de los modos de funcionamiento de una planta solar de frıo 99
El caudal del generador se obtiene mediante la suma de los caudales delgenerador y de tanques.
Modo 5.2
La configuracion de la planta en el modo 5.2 se muestra en la grafica 4.41.
Sistema de acumulación
Sistema de acumulación
Sistema auxiliar
de energía
Torre de refrigeración
Sala acondicionada
VM3 B1
Sistema de energía solar
Máquina de absorción
fan coils
Teev
Tsev Tege
Tsge
Tstr
Tetr
203
201
204
206 301
205
202
B4
VM1
Figura 4.41: Modo de funcionamiento 5.2
En este caso, todo el agua que llega a la maquina de absorcion provienedel sistema de acumulacion. El caudal de caldera es nulo y los caudales delgenerador y de los tanques dependen de la apertura de la valvula V M3, semuestran en la figura 4.42.
El caudal de colectores, tanto para el modo 5.1 como para el modo 5.2, dependede si existe recirculacion o no en el campo solar. Si se recircula agua, el caudalde colectores segun la velocidad de la bomba B1 se representa en la grafica 4.5 ysi por el contrario no hubiera recirculacion, evidentemente el caudal serıa nulo.
4.6.2. Problema de control
Los unicos modos en los que la planta opera solo con la energıa acumulada enlos tanques son los modos 5.1 y 5.2. La maquina de absorcion se abastece del aguacaliente de los acumuladores. Se garantiza que la temperatura del agua acumuladaes suficientemente elevada como para que el equipo funcione correctamente. Comoen dichos modos no es posible el control de la temperatura del generador, lapotencia frigorıfica demandada se regula mediante el caudal del generador.

100 4.6. Modo 5. Sistema de acumulacion
0 20 40 60 80 1004500
5000
5500
6000
6500
7000
7500
8000
8500
9000
VM3 (%)
Cau
dal g
ener
ador
y ta
nque
s (l/
h)
Figura 4.42: Modo 5.2. Caudal del generador
4.6.2.1. Modo de funcionamiento 5.1
En el modo de funcionamiento 5.1, desde el punto de vista de control, sedebe garantizar que el caudal de caldera se mantenga en el valor de la referencia(1400 l/h segun la secuencia de seguridad de caldera). Por lo tanto, no se puedegarantizar ni el maximo rendimiento del equipo ni la regulacion de la potenciafrigorıfica. De todas formas tanto el modo 5.1 como los modos 3.1 y 4.1, (necesariospara la proteccion de la planta) normalmente cuando se activan lo hacen en unperıodo de tiempo muy corto, casi despreciable. La estrategia de control adoptadaen el modo 5.1 se describe en la figura 4.43, como se puede percibir, por un ladose tiene un controlador pid que controla el caudal de caldera, y por otro lado, enel caso de que hubiera recirculacion de agua en el campo solar, la temperatura delos colectores se regula mediante el controlador gpcc (detallado en el capıtulo 5).La referencia viene dada por el algoritmo de optimizacion descrito en el capıtuloanterior.
4.6.2.2. Modo de funcionamiento 5.2
En este caso, el control de la potencia frigorıfica se realiza mediante el caudaldel generador, para ello se utiliza un pid que actua sobre la valvula V M3 donde

Capıtulo 4. Analisis de los modos de funcionamiento de una planta solar de frıo 101
VM3 (%)
Planta solar
MPC ( GPCC )
B1 (%)
SP _ Tsc = SP _ Tge + cte
Tsc
Perturbaciones
Restricciones
PI SP _ Qcal =1400 l /h
Qcal
Ir , Tec , Tamb
Qc >800
Figura 4.43: Estrategia de control. Modo de funcionamiento 5.1
VM3 (%)
Planta solar
MPC ( GPCC )
B1 (%) SP _ Tsc
Tsc
Perturbaciones
Restricciones
PI SP _ Qge
Qge
Qcol >=800
Ir , Tec , Tamb
Figura 4.44: Estrategia de control. Modo de funcionamiento 5.2
la referencia es indicada por el algoritmo desarrollado en el capıtulo 3.
En la grafica 4.44 se muestra la estrategia de control acordada en el modo 5.2.
Como se indica en dicha figura existe otro controlador para regular la tem-

102 4.7. Resumen. Modos de funcionamiento y caudales
peratura de salida del campo solar, en el caso de que fuera necesario recircularagua por el. Para ello se emplea el controlador gpcc nombrado anteriormente.La referencia la fija el algoritmo realizado para tal efecto (capıtulo 3).
4.7. Resumen. Modos de funcionamiento y cau-
dales
En la tabla 4.7, se muestran todos los modos de funcionamiento con los que sevan a trabajar en la planta solar. Para el control de dicha planta se modificaran losmodos de funcionamiento en lınea y dentro de cada modo existira una estrategiade control diferente.
Modos de 201 202 203 204 205 206 301 llama V M1 B1 B4
funcionamiento
Modo 1 0 0 0 0 1 1 1 1 0 1 1Modo 2.1 1 1 0 0 1 1 1 1 1 1 1Modo 2.2 1 0 0 1 1 0 1 1 1 1 1Modo 3.1 1 0 1 1 1 0 1 0 1 1 1Modo 3.2 1 0 0 1 1 0 0 0 1 1 1Modo 3.3 1 0 1 1 1 0 0 0 1 1 1Modo 3.4 1 1 1 1 0 0 0 0 1 1 1Modo 4.1 0 0 1 1 0 0 1 0 1 1 1Modo 4.2 0 0 1 1 0 0 0 0 1 1 1Modo 5.1 0 0 0 0 1 1 1 0 0 1 1Modo 5.2 0 0 0 0 1 1 0 0 0 1 1
Cuadro 4.7: Resumen modos de funcionamiento
A modo de resumen, se ha realizado la tabla 4.8, en la que se muestra losvalores mınimos y maximos de los caudales de tanques, caldera, generador ycolectores para cada uno de los modos de funcionamiento de la planta.
4.8. Diagrama de flujo
En esta seccion se presenta el diagrama de flujo que permite la seleccion delos modos de funcionamiento (ver grafica 4.45).

Capıtulo 4. Analisis de los modos de funcionamiento de una planta solar de frıo 103
Modos Tanques Caldera Generador ColectoresModo 1 1500/8500 1500/7500 8000/10000 800/6100
Modo 2.1 2300/14000 1500/7500 8000/10000 800/5500Modo 2.2 800/7000 1500/8000 7200/9800 800/7000Modo 3.1 > 1666 1400 6500/8600 5060/6800Modo 3.2 3000/7300 0 3000/7300 3000/7000Modo 3.3 > 1666 0 3500/8000 3500/8000Modo 3.4 0 0 3184/7640 3120/7400Modo 4.1 0 1400 6970/8770 5570/7370Modo 4.2 0 0 3250/7600 3160/7400Modo 5.1 3600/7300 1400 5000/8700 800/6100Modo 5.2 5000/8700 0 5000/8700 800/6100
Cuadro 4.8: Caudales maximos y mınimos en litros por hora.
Es necesario destacar que los modos 3.1, 3.2, 3.3, 4.1 y 4.2 se pueden activar,ademas de las razones anteriormente indicadas, por otras circunstancias deriva-das de los requerimientos del control. Ya se ha comentado que la estrategia decontrol propuesta conduce a la planta a trabajar con el maximo coeficiente decomportamiento.
Si la planta se encuentra trabajando en alguna de las configuraciones del modo3 y existen limitaciones en el control, de forma que es imposible tecnicamentealcanzar el caudal necesario para obtener el maximo rendimiento del equipo deabsorcion (condicion del diagrama de flujo SPQ) , se activa el modo 4.
De otra manera, si la planta esta trabajando en el modo 4.1 o 4.2, y existeun desaprovechamiento de energıa solar. Es decir si la temperatura deseada en elgenerador es inferior (en 4C) a la temperatura de salida de colectores estamosdesperdiciando energıa solar que se podrıa aprovechar en los acumuladores (con-dicion del diagrama de flujo SPT ). Como en el modo 4 no se puede almacenarenergıa, se activa el modo 3, aunque en dicho modo no se alcance el maximocoeficiente de comportamiento.
El algoritmo de seleccion de los modos de funcionamiento depende de lascondiciones meteorologicas del dıa y de la tendencia de la radiacion solar, en elsentido creciente o decreciente segun la hora del dıa.
El parametro RT que aparece en el diagrama de flujo 4.45, indica el valor quedebe alcanzar la temperatura de salida de colectores para activar los modos 3.1,3.2, 3.3, 4.1 y 4.2, donde fundamentalmente, la maquina de absorcion trabaja

104 4.9. Conclusion
directamente con la energıa del campo solar. Para un dıa despejado donde nopredominen las nubes, el valor de de RT es de 80C.
Es necesario contemplar dos cuestiones, la primera es que cuando la radiacionsolar comienza a decrecer y el valor de la temperatura de salida de colectoresadquiera un valor inferior a 80C, se activara el sistema de energıa auxiliar o ensu caso el sistema de acumulacion (si su temperatura lo permite). Una vez que secambia de modo, es muy probable que la Tsc alcance de nuevo los 80C, pero sesabe a priori, como la radiacion esta decreciendo, que si se volviera a otro modo yse apagara la caldera de nuevo descenderıa el valor de la Tsc y otra vez se tendrıaque activar la caldera, y ası sucesivamente.
La segunda cuestion es que si se trata de un dıa con abundantes nubes ocurrirıala misma situacion anteriormente descrita.
Para impedir los constantes encendidos y apagados de caldera se emplea elparametro RT . Dicho parametro toma dos valores que dependen de las condicio-nes atmosfericas y de las horas de radiacion solar.
En los dıas soleados con pocas nubes y en la franja horaria en que la radiacionsolar aun no ha comenzado a decrecer, el parametro RT toma el valor de 80C
Por otro lado en los dıas con abundantes nubes y/o en las horas del dıa enque la radiacion tiende a decrecer, el parametro tomara el valor de 90C, coneste valor impedimos que se este cambiando de modos innecesariamente, y ası seevitara los constantes encendidos y apagados de caldera.
4.9. Conclusion
En este capıtulo se ha llevado a cabo un analisis de los diferentes modos defuncionamiento y se ha realizado un algoritmo para su seleccion. Se han analizadolos caudales en cada uno de ellos y se han propuestos diferentes estrategias decontrol en cada configuracion.

Capıtulo 4. Analisis de los modos de funcionamiento de una planta solar de frıo 105
Inicio
Tac <80
Tsc < RF Tsc < RF
Tcal <75
si no
no Tcal <75
si
si
fin
no
si
si
Tsc < Tac
si
modo =1 modo =33 modo =31 modo =42 modo =41 modo =22
no
no
Tcal <75 no
si
Tcal <75 no
si
SPQ
no
SPT si
si
no
no
modo =21
si
modo =32 modo =52 modo =51
B1 !=0 y VM3 >=19
no
si
Tsc >= Tac
no
Figura 4.45: Diagrama de flujo, algoritmo de seleccion de los modos de funcionamiento

106 4.9. Conclusion

Capıtulo 5
Controlador predictivoadaptativo con identificacionsimultanea
En este capıtulo se proponen una nueva alternativa del controlador predictivoadaptativo el cual integra en una misma funcion de coste el calculo de la accion decontrol y la estimacion de parametros, de forma que cumple las caracterısticas delos controladores duales. El controlador incluye un novedoso metodo de identifi-cacion, denominado ventana de identificacion inteligente. Dicho metodo garantizariqueza dinamica en los datos produciendo una buena y fiable identificacion delsistema.
5.1. Introduccion y motivacion.
El Control Predictivo basado en modelo (Model Predictive Control, mpc) hasido objeto de sucesivas investigaciones en los ultimos anos, tanto en la comunidadde la industria como en el ambito universitario (Nunez-Reyes & Bordons 2003),(Nunez-Reyes, Scheffer-Dutra & Bordons 2002a), (Nunez-Reyes, Scheffer-Dutra& Bordons 2002c), (Nunez-Reyes, Cueli & Bordons 2001), (F.Dorado, Nunez-Reyes, Camacho & Bordons 2000). En general el mpc puede controlar la mayorıade los procesos no lineales que se encuentran en la industria. Sin embargo una delas mayores desventajas de este tipo de estrategia de control es que es necesarioconocer un modelo dinamico de la planta a priori. El exito de la mayorıa de loscontroladores predictivos comerciales (Qin & Badgwell 2003), viene dado porque
107

108 5.1. Introduccion y motivacion.
el paquete software ofrece la posibilidad de identificacion de la planta mediante unmodelo de respuesta ante escalon la cual se puede obtener facilmente mediantetests experimentales. No obstante, la fase de identificacion necesita demasiadotiempo y experiencia para realizar los experimentos, y ademas la identificacionse suele llevar a cabo solo una unica vez, en la puesta en marcha del proceso.El modelo no se suele actualizar frecuentemente incluso si existen cambios de ladinamica del proceso a lo largo del tiempo.
Las incertidumbres y las perturbaciones del modelo concernientes al mpc sonmuy importantes y han sido objeto de estudios en los ultimos anos. Las principalesinvestigaciones sobre este campo aparecen en el ambito del control adaptativoy el control robusto. Existen en la literatura muchos trabajos sobre el controlrobusto mpc, con importantes contribuciones en el entorno del control min-max,de las cuales, a pesar de su importancia teorica, es reconocida su dificultad deimplementarlos y llevarlos a la practica. (Ramırez & Camacho 2002).
El control adaptativo predictivo ha sido estudiado por numerosos autores, tan-to para sistemas monovariables como para sistemas multivariables como el contro-lador autosintonizado basado en predictores (Peterka 1984), el control adaptativode horizonte extendido (Ydstie 1984), el controlador autosintonizado (Keyser &Cuawenberghe 1985), el controlador predictivo generalizado tambien se puedecitar en este contexto (Clarke, Mothadi & Tuffs 1987), el controlador adaptati-vo multipaso (Greco et al. 1984), el controlador predictivo funcional (Richaletet al. 1987), ası como otros (Arahal, Berenguel & Dıaz 2006), (Rodriguez, Guz-man, Berenguel & Arahal In press 2007), (Mosca 1995b) y (Camacho, Berenguel& Rubio 1997b).
La aplicacion del controlador self-tuning con un algoritmo de identificacionmediante mınimos cuadrados recurrentes (Recursive Least Squares, rls), propor-ciona una solucion que es facilmente implementable, pero que posee numerososproblemas numericos cuando la excitacion de las variables no es suficiente o ine-xistente (Astrom & Wittenmark 1989). Se necesita un nivel de supervision parapaliar estos problemas que convierte el procedimiento simple en otro mucho mascomplejo. Se puede resolver el problema mediante los metodos propuestos por(Shouche et al. 2002), (Shouche, Genceli, Vuthandam & Nikolaou 1998), (Genceli& Nikolaou 1996) que consiste en un controlador mpc adaptativo (mpci), queemplea la condicion de la excitacion persistente (Goodwin & Sin 1984) la cualgarantiza la identificabilidad del sistema. La principal desventaja de este metodoes que el uso de la condicion de la excitacion persistente deteriora notablemente elcomportamiento del controlador. Aunque la capacidad de identificacion del meto-do es buena, el hecho de que las senales de control se calculen para garantizar laexcitacion persistente da lugar a un control insuficiente del sistema. Los autores

Capıtulo 5. Controlador predictivo adaptativo con identificacion simultanea 109
solo estudian el metodo en simulacion, no lo aplican a plantas reales.
5.1.1. Control dual
En la mayorıa de los esquemas del control adaptativo la estimacion de losparametros se separa del diseno del controlador. Los parametros estimados seutilizan en el controlador como si fuesen los valores reales de los parametrosdesconocidos, por lo que no se tiene en cuenta la incertidumbre del modelo, estoes lo que se denomina Principio de Equivalencia Cierta (pec).
Feldbaum (Feldbaum 1960-61) indico que los controladores adaptativos ba-sados en el pec no siempre son optimos y ademas pueden estar muy alejadosde la solucion optima. Dicho autor considero el problema del control adaptativooptimo (Feldbaum 1965) y postulo dos propiedades principales que la senal decontrol de un sistema adaptativo optimo debıa cumplir: deberıa asegurar que (i)la salida del sistema siga al valor de la referencia dada, y (ii) excitar la plantalo suficiente como para permitir la correcta estimacion de los parametros de talforma que la calidad del control llegue a ser mejor en los intervalos de tiempofuturos. Ambas propiedades se conocen como propiedades duales o caracterısti-cas duales. Los sistemas de control adaptativos que cumplen estas propiedades sedenominan sistemas de control dual.
Cuando la accion de control y la trayectoria de referencia no poseen riquezadinamica existe la posibilidad de que los parametros estimados deriven (Anderson1985) a causa del ruido o de la dinamica no modelada de la planta. El instante en elque aparece dicho fenomeno es aleatorio y la duracion junto a la maxima amplitudes impredecible. En (Anderson 1985) se justifica la necesidad de incorporar la pecen los sistemas de adaptacion de parametros.
La formulacion original del control dual es la siguiente (Feldbaum 1965). Dadoun sistema en tiempo discreto en funcion del estado, de los parametros y de lassalidas:
x(k + 1) = f(x(k), θ(k), u(k), ζ(k)), k = 0, . . . , N − 1
θ(k + 1) = νk(θ(k), ǫ(k))
y(k) = hg(x(k), η(k))
donde x(k) ∈ ℜnx es el vector de estados, θ(k) ∈ ℜnθ es el vector de parametrosdesconocidos, u(k) ∈ ℜnu es el vector de acciones de control, y(k) ∈ ℜny es elvector de salidas del sistema y ζ(k) ∈ ℜnζ , ǫ(k) ∈ ℜnǫ y η(k) ∈ ℜnη son vectores deruido blanco aleatorio de media cero y distribuciones de probabilidad conocidas.

110 5.1. Introduccion y motivacion.
La funcion νk describe los parametros variantes en el tiempo, la probabilidad dedensidad de los valores iniciales x(0) y θ(0) se supone conocida.
El conjunto de entradas y salidas del control en el instante k se denota de lasiguiente manera:
ξk = y(k), . . . , y(0), u(k − 1), . . . , u(0) ∀k = 1, . . . , N − 1
El ındice de comportamiento para la optimizacion del control es el siguiente:
J = EN−1∑
k=0
gk+1(x(k + 1), u(k)) (5.1)
donde gk+1 es una funcion escalar convexa positiva conocida. El problema delcontrol dual adaptativo optimo consiste en encontrar la polıtica de control u(k) ∈Ωk para k = 0, . . . , N − 1 que minimiza el ındice de la ecuacion 5.1 donde Ωk esel dominio en el espacio ℜn
u en el cual se define los valores de control admisibles.
La solucion del problema del control dual adaptativo optimo, en la formulacionconsiderada por Feldbaum (Feldbaum 1965) se puede obtener mediante el uso dela programacion dinamica:
JCLON−1 (ξN−1) = mın
u(N−1)∈ΩN−1
[EgN(x(N), u(N − 1))|ξN−1]
JCLOk (ξk) = mın
u(k)∈Ωk
[Egk+1(x(k + 1), u(k)) + JCLOk+1 (ξk+1)|ξk]
donde CLO significa optimo en bucle cerrado. La dificultad analıtica en encon-trar las soluciones recursivas de las anteriores ecuaciones y la dificultad numeri-ca causada por la alta dimensionalidad del espacio hacen que este problemasea practicamente irresoluble incluso para casos muy simples (Bar-Shalom &Tse 1976) (Bayard & Eslami 1985).
Las dificultades de encontrar la solucion optima dan paso a distintas solucionessuboptimas que pueden dividirse en dos grandes grupos: (i) aproximaciones paraencontrar la solucion del problema del control dual adaptativo original y (ii)reformulacion del problema para obtener una solucion simple pero manteniendolas propiedades duales. Dichas soluciones se denominan metodos de control dualadaptativo implıcito y explıcito respectivamente.

Capıtulo 5. Controlador predictivo adaptativo con identificacion simultanea 111
La idea basica de estos metodos consiste en el diseno de sistemas adaptativosque no son optimos pero que poseen las principales caracterısticas de un sistemade control adaptativo optimo.
Los metodos de control dual adaptativo implıcito se basan en aproximacio-nes de las ecuaciones de la programacion dinamica estocasticas, son normalmentecomplejos y requieren un gran esfuerzo computacional. Dichas aproximacioneshacen que el sistema pierda las caracterısticas duales y que al final el compor-tamiento del controlador sea inadecuado (Bar-Shalom & Tse 1976), (Bayard &Eslami 1985), (Bertsekas 1976), (Birmiwal 1994).
Los metodos explıcitos, basado en la reformulacion del problema son mas fle-xibles y prometedores. La reformulacion del problema de control dual adaptativoconsidera una funcion de coste especial (ecuacion 5.2) que engloba dos objetivosdiferentes el esfuerzo de control (5.3) y la medida de la incertidumbre (un ındicede bondad de la estimacion de parametros) (5.4) (Wittenmark 1975), (Milito,Padilla, Padilla & Cadorin 1982).
Jek = J c
k + λJak , λ ≥ 0 (5.2)
donde
J ck = E[w(k + 1)− y(k + 1)]2|ξk (5.3)
y
Jak = −E[y(k + 1)− b(k)u(k)]2|ξk (5.4)
Siendo w(k + 1) la referencia, y(k + 1) la salida predicha del sistema, u(k) laaccion de control, b el parametro estimado del sistema y ξ los salidas y entradaspasadas del sistema:
ξk = y(k), . . . , y(0), u(k − 1), . . . , u(0) ∀k = 1, . . . , N − 1
La solucion de este problema consiste en obtener la accion de control minimizandoındice 5.2.
Con este metodo es posible disenar controladores duales simples y sin granesfuerzo computacional. Sin embargo, la optimizacion de la funcion de coste nogarantiza la excitacion persistente de la senal de control y el comportamientodel control de los controladores duales basados la funcion de coste especial esinadecuado.
El metodo bicriterio (Filatov & Uunbehauen 2004), combina los dos metodospara resolver el problema de control dual, implıcito y explıcito. La principal idea

112 5.1. Introduccion y motivacion.
de la aproximacion bicriterio consiste en introducir dos funciones de coste quecorresponden a los dos objetivos del control dual: (i) seguimiento de referencia y(ii) introduccion de Excitacion Persistente (ep). Dichas funciones de coste repre-sentan el esfuerzo de control y un ındice de la incertidumbre de los parametrosestimados, respectivamente. Las funciones de coste se resuelven secuencialmente.Con la minimizacion de la primera se obtiene la accion de control y con la mi-nimizacion del ındice de incertidumbre se dota al sistema de una ep optima. Laminimizacion de la segunda funcion de coste se realiza dentro de un dominio, alcual pertenece la accion de control optima obtenida por la primera funcion decoste. El tamano del dominio determina la magnitud de la excitacion.
En este capıtulo se propone una nueva reformulacion del problema del controldual basado en el gpc. El controlador propuesto, denominado gpc adaptativo conidentificacion simultanea o gpc compacto (gpcc)integra en una unica funcion decoste el calculo de la accion de control y la estimacion de parametros (Nunez-Reyes & Bordons 2005). La estimacion de los parametros se encuentra afectadapor la accion de control. Es obvio que debe cumplir las dos propiedades quecaracterizan cualquier controlador dual. En cuanto a la primera: seguimiento dela referencia, es uno de los objetivos que debe cumplir y se indica en la funcion decoste. Y en cuanto a la segunda propiedad: introducir ep en la senal de control,el controlador gpcc la cumple indirectamente.
Se ha disenado un modulo denominado ventana de identificacion inteligente(se desarrolla en el presente capıtulo) que garantiza la estimacion de parametroscon aquellas medidas que posean una cierta riqueza dinamica. Ademas el algo-ritmo tambien tiene la posibilidad de parar o comenzar la estimacion cuando elestado del sistema ası lo requiera. Por lo tanto el controlador gpcc no introdu-ce excitacion persistente en la senal de control, pero sı garantiza que el metodode estimacion de parametros se realice solo cuando sea necesario y siempre conmedidas que poseen excitacion. Es una forma indirecta de cumplir la segundapropiedad de los controladores duales.
La inclusion de la excitacion persistente, ya sea en la accion de control omediante una senal externa, no siempre es posible llevarla a cabo, por ejemplo,existen sistemas que por motivos de seguridad consideran restricciones de igual-dad en la salida controlada, en dichos sistemas el comportamiento del controladorse vera deteriorado a causa de la excitacion anadida. Tambien existen sistemascuyo requisito de control exige que la salida controlada no pueda alejarse dema-siado de la referencia donde existe el riesgo de parada (como es el caso de lamaquina de absorcion de la planta de frıo solar) o la activacion de alarmas deseguridad. Ademas la excitacion persistente puede causar fatiga en los materiales,deteriorando e inutilizando valvulas y bombas del sistema.

Capıtulo 5. Controlador predictivo adaptativo con identificacion simultanea 113
5.2. Ventana de identificacion inteligente
Antes del desarrollo del controlador gpcc, se va a llevar a cabo la explicaciondetallada del modulo: ventana de identificacion inteligente.
5.2.1. Introduccion
Con objeto de clarificar las nuevas aportaciones en el metodo de estimacionde parametros, se lleva a cabo un leve recordatorio del metodo de Mınimos Cua-drados Recurrente (mcr o rls1).
Metodo de mınimos cuadrados ponderados recurrente
Se considera un modelo parametrico ARX(n, n) determinista (5.5):
y(t) = −a1y(t− 1) + . . .− any(t− n) + b1u(t− 1) + . . . + bnu(t− n) (5.5)
El modelo se puede reescribir en forma vectorial como: y(t) = φ(t)θ, siendo φ(t),el vector de regresores (medidas pasadas):
φ(t) = [−y(t− 1), . . .− y(t− n), u(t− 1), . . . u(t− n)]
y θ el vector de parametros:
θ = [a1, . . . , an, b1, . . . , bn]T
Dado un valor del vector de parametros θ 6= θ, se puede construir el mo-delo ARX(n, n) que produce la prediccion y(t) = φ(t)θ. Entonces el vector deprediccion de salida viene dado por:
e(t) = y(t)− y(t) = y(t)− φ(t)θ
El objetivo del metodo de los mınimos cuadrados consiste en calcular el valorde θ que minimiza el ındice siguiente:
mınθ
J =N
∑
t=n
λe2(t) =N
∑
t=n
λ(y(t)− φ(t)θ)2
1Recursive Last Square

114 5.2. Ventana de identificacion inteligente
Donde λ es el factor de olvido que se define como un numero real positivoacotado entre 1 y 0: 0 < λ < 1.
Como es bien sabido, la solucion a este problema implica la inversion de lamatriz de regresores, por lo que esta debe tener rango completo. Para que lamatriz sea invertible no pueden existir combinaciones lineales entre sus filas. Estono se cumple, si la entrada al sistema es constante o no cumple la condicionde excitacion o excitacion persistente. Otra cuestion a tener en cuenta es que lainversion de la matriz conlleva mucho tiempo de calculo dificultando su aplicacionen tiempo real para la identificacion en lınea. Por lo que se utiliza el algoritmode estimacion de mınimos cuadrados ponderados recurrente que proporciona elvector θ de parametros en funcion de los valores del instante anterior de la forma:
θ(t + 1) = θ(t) + K(t)(y(t + 1)− φ(t + 1)θ(t))
Siendo
K(t) =P (t)φT (t + 1)
λ + φ(t + 1)P (t)φT (t + 1)
y P (t + 1), denominada matriz de covarianzas.
P (t + 1) =1
λP (t)(I −K(t)φ(t + 1))
Con el metodo de mınimos cuadrados recurrente hay que tener en cuenta lossiguientes puntos:
Si el vector de medidas es siempre de la misma magnitud y el factor deolvido es igual a 1, la matriz de covarianza decrece monotonamente como1/t pudiendo la ganancia del identificador hacerse nula, lo que conllevaa la anulacion del mecanismo de identificacion imposibilitando ası seguirposibles cambios en la dinamica del sistema.
Si el punto de trabajo no varıa, el vector de regresores φ(t) puede anularse,por lo que el producto P (k)φ(k) tambien se anula, siendo en este casoP (k + 1) = P (k)/λ, por lo que P (k) crece exponencialmente. Cuando lamatriz P (k) posee valores demasiado elevados, hace que el identificador seamuy sensible a cualquier cambio y al ruido, produciendo la inestabilidad delestimador lo que conllevarıa a la inestabilidad del sistema en bucle cerrado.
Para prevenir estos problemas se suele utilizar un factor de olvido variable.
Tambien puede darse el caso de que la matriz P puede volverse defini-da negativa como resultado de errores de redondeo. una solucion a es-te problema podrıa ser la factorizacion de P de la forma P (t + 1) =

Capıtulo 5. Controlador predictivo adaptativo con identificacion simultanea 115
U(t + 1D(t + 1)UT (t + 1), donde D es una matriz diagonal y U es unamatriz triangular superior con sus elementos diagonales iguales a la unidad.
Metodo de ventana de identificacion inteligente
En el presente trabajo se propone una alternativa a la identificacion en lıneadel metodo de mınimos cuadrados recurrente, denominado ventana de identifica-cion inteligente (vii). La principal idea del metodo vii radica en que se obtienela estimacion de los parametros considerando una ventana de datos (pasados ofuturos), no solo las medidas del instante anterior.
Se considera un modelo parametrico ARX(na, nb) determinista (5.6):
y(t) = −a1y(t− 1) + . . .− anay(t− n) + b1u(t− 1) + . . . + bnbu(t− n) (5.6)
El algoritmo vii minimiza la siguiente funcion de coste:
mınθ
J =N3∑
j=1
γ(j)e2(j) =N3∑
j=1
γ(j)[y(t− j + 1)− φ(t− j)θ(t)]2 (5.7)
s.a aimin≤ ai ≤ aimax
∀i = 1 . . . na
bkmin≤ bk ≤ bkmax
∀k = 1 . . . nb (5.8)
Donde N3 es el horizonte de identificacion y γ(j) es la secuencia de peso de lafuncion de coste.
y(t− j + 1) es un vector que representa las salidas pasadas del sistema hastael instante t, con dimension N3 × 1:
y(t− j + 1) =
y(t)y(t− 1)
. . .y(t−N3 − 1)
∀j = 1 . . . N3
la matriz de regresion φ de tamano N3 × (na + nb) es la siguiente:
φ(t− j) =
−y(t− 1) . . .− y(t− 1− na) u(t− d− 1) . . . u(t− d− 1− nb)−y(t− 2) . . .− y(t− 2− na) u(t− d− 2) . . . u(t− d− 1− nb)
. . .
−y(t−N3) . . .− y(t−N3 − na) u(t− d−N3) . . . u(t− d−N3 − nb)

116 5.2. Ventana de identificacion inteligente
∀j = 1 . . . N3
θ es el vector que contiene los parametros estimados ai, bi con dimension(na + nb)× 1
ˆθ(t) = [a1(t) a2(t) . . . ana(t) b0(t) . . . bnb(t)]T
El problema de optimizacion es convexo y se puede hallar la solucion utilizandocualquier algoritmo que resuelva problemas de optimizacion qp, por ejemplo conla funcion quadprog que incluye las herramientas de optimizacion de Matlab.
La diferencia fundamental entre los dos anteriores metodos radica en que elesquema de mcr empleado en Regulador Autoajustable (raa) o Self Tuning Re-gulator (str) tradicional usa solamente las muestras recien tomadas mientrasque el metodo propuesto utiliza una ventana de datos configurable tanto en el ta-mano como en los datos que forman la matriz de regresores (φ), los cuales puedenser independientes del tiempo y no consecutivos. De forma que esta propiedadpermite seleccionar datos con riqueza dinamica.
La solucion propuesta intenta precisamente determinar como seleccionar losdatos que conviene utilizar. Se pasarıa entonces de un ındice basado en la sumade desviaciones cuadraticas dentro de una ventana a una suma dentro de unconjunto de instantes escogidos de la ventana. Se abre ası la posibilidad de usarmuestras que son temporalmente no consecutivas, de usar ventanas de longitudvariable y de acelerar o frenar e incluso de parar la adaptacion de parametros.
A continuacion se indica la nomenclatura utilizada en el desarrollo del metodovii:
Muestra Conjunto de senales u(t), y(t) correspondientes a un mismo instantetemporal t.
Regresor Vector de senales φ(t) = (−y(t− 1)− y(t− 2) · · · u(t− 1)u(t− 2) · · ·)T
disponibles en el instante t para ser usadas como variables de entrada delmodelo. Tambien sera llamado vector de medidas y vector de entrada.
Ventana Matriz de muestras comprendidas entre dos instantes tini, tfin. El anchose define como a = tfin−tini+1. El valor final se corresponde con el instantede tiempo actual t (tfinal = t) y como es deslizante en el tiempo y su anchoes constante el valor inicial se calcula de la siguiente forma tini = tfin−a+1.
Regresor candidato Cualquiera de los φ(t) en una cierta ventana dada por tini,tfin.

Capıtulo 5. Controlador predictivo adaptativo con identificacion simultanea 117
Ejemplar Regresor seleccionado de entre los candidatos por poseer cualidadesde excitacion.
Conjunto Ejemplar Matiz formada por todos los ejemplares. Se vera posterior-mente que el objetivo del metodo propuesto se reduce a hallar un conjuntoejemplar.
5.2.2. Desarrollo
Los pasos a seguir para llevar a cabo la creacion de la ventana de identificacioninteligente son los siguientes:
1 Filtrado no causal. Permitira eliminar ruido presente en las senales sin intro-ducir retraso o perdida de fase.
2 Formacion de regresores candidatos y creacion de ventana.
3 Seleccion de un nuevo ejemplar. La evaluacion de la excitacion, permitira se-leccionar que datos son mas idoneos para la adaptacion de parametros.Estas medidas seleccionadas seran llamados ejemplares. Existen dos formasde seleccionar un nuevo ejemplar: (i) deteccion de un punto de operacion,(ii) y evaluacion de la excitacion mediante la distancia en el espacio de losregrsores y el conjunto ejemplar.
4 Inclusion del nuevo ejemplar en la memoria de ejemplares.
5 Creacion del conjunto ejemplar.
En la figura 5.1, se muestra el diagrama de flujo del metodo vii.
A continuacion se describen todos los pasos a seguir para la creacion de laventana de identificacion inteligente.
1. Filtrado no causal
El filtrado no causal consiste en utilizar un filtro paso bajo que actua dosveces sobre las senales, en la primera pasada se filtra normalmente y se obtieneuna senal alisada y con desfase respecto a la original. En la segunda pasada seinvierte el sentido del tiempo, pasando primero las senales de tiempos mayores ydespues las senales de tiempos menores. De este modo se alisa aun mas la senal

118 5.2. Ventana de identificacion inteligente
Inicio
1. Filtrado no causal de muestras
2.Formación de regresores candidatos y creación de ventana de
identificación
3.1. ¿ Cambio de punto de operación ?
si
no
4. Incluir ejemplar en la memoria de ejemplares
actuales
3.2. ¿ Regresor con riqueza dinámica ?
no
si
6. Creación conjunto ejemplar
fin
3
Figura 5.1: Algoritmo ventana de identificacion inteligente.
y el desfase desaparece. No es necesario filtrar senales que se supongan sin ruidocomo por ejemplo las actuaciones.
En este ejemplo se va a poner de manifiesto la ventaja de usar el filtrado nocausal en la identificacion. Se utiliza una simulacion con un modelo en tiempocontinuo de segundo orden cuya salida esta contaminada por ruido. A partir delos datos de la simulacion se identificaran los parametros de un modelo de primerorden en tiempo discreto. Se observara que el filtrado de datos permite obtenermodelos mas cercanos a la realidad.
El sistema que se ha utilizado para la simulacion es el siguiente:
G(s) =10
(s + 1)(s + 10)

Capıtulo 5. Controlador predictivo adaptativo con identificacion simultanea 119
de ganancia unidad y con un polo dominante en s = −1. En la figura 5.2 seobserva la entrada u(t) y la salida y(t) correspondientes a una simulacion de lacual se obtendran los datos para la posterior identificacion.
La senal de entrada contiene dos tramos, el primero se ha obtenido como lasinusoide: sen(t/10) + sen(t/3) + sen(t) y el segundo es una senal en diente desierra. La figura 5.2 muestra un trozo nada mas del primer tramo.
0 20 40 60 80 100
−2
−1
0
1
2
tiempo (s)
u (−
), y
(−
.)
Figura 5.2: Trayectorias de la entrada (lınea continua) y la salida (lınea a trazos) de
G(s) en simulacion.
Los datos de la simulacion se muestrean con un periodo de 0,1 segundos. Seanade ademas un ruido de media nula y varianza 0.8 procedente de una distribu-cion normal. Ademas se incluyen falsas medidas en los muestreos multiplos de 50,de este modo se pretende producir unas medidas muestreadas (ym) con erroresde diversos tipos. En la figura 5.3 se observa la evolucion de la salida muestreadaym(t) en los muestreos comprendidos entre t = 200 y t = 400.
A fin de observar el efecto del filtrado no causal se muestra en la figura 5.4 laevolucion de la senal muestreada ym(t) y de varias versiones obtenidas aplicandolos filtros siguientes:
(1) filtro de primer orden dado por yf1(t) = 0,5yf1(t− 1) + 0,5ym(t)

120 5.2. Ventana de identificacion inteligente
200 250 300 350 400
−1.5
−1
−0.5
0
0.5
1
1.5
2
muestras
y m
Figura 5.3: Salida muestreada ym(t) afectada por errores de medida.
(2) filtro de primer orden dado por yf2(t) = 0,6yf2(t− 1) + 0,4ym(t)
(3) filtro no causal obtenido mediante dos pasadas del filtro (1), la segundade las cuales se realiza invirtiendo el sentido del tiempo, obteniendose lasenal yf3(t)
Ademas se ha incluido la senal original y sin contaminar por el ruido a fin depoder apreciar mejor las ventajas del filtrado no causal.
A continuacion se procede a la identificacion del proceso simulado, medianteun modelo de primer orden dado por:
yp(t) = ayp(t− 1) + (1− a)u(t)
Para realizar la identificacion se utiliza el metodo de mınimos cuadrados. Secomprueba que el algoritmo de mınimos cuadrados produce diferentes resultadosdependiendo del tipo de senal utilizada para la identificacion.
En la tabla 5.1 se muestran los datos obtenidos en la identificacion, los parame-tros estimados, a y b y el criterio del error de prediccion final (fpe) (Akaike 1973)

Capıtulo 5. Controlador predictivo adaptativo con identificacion simultanea 121
190 200 210 220 230 240 2500
0.5
1
1.5
2
muestras
y, y
m, y
f1, y
f2, y
f3yy
my
f1y
f2y
f3
Figura 5.4: Salida original del sistema simulado y, salida muestreada y contaminada
por ruido y falsas medidas ym y tres versiones filtradas de la misma.
definido como:
FPE =1 + n/N
1− n/NV
donde n es el numero total de parametros estimados, N el numero total de datosy V es la funcion que mide el acuerdo entre el modelo y los datos.
Como puede verse el ultimo modelo (obtenido con el filtrado no causal) es elque se acerca mas al proceso que genero los datos.
Interpretacion geometrica
Filtro utilizado a b fpesin filtrar 0.8408 0.1424 0.0388604
f1 0.9101 0.08931 0.00681804f2 0.919 0.08234 0.00414434f3 0.9086 0.09033 0.00153713
Cuadro 5.1: Resultados de la identificacion para datos de entrada sin filtrar y filtrados
mediante diferentes metodos.

122 5.2. Ventana de identificacion inteligente
La figura 5.5 muestra en el eje vertical los valores de la salida en t+1 frente ala propia salida en el instante t para t ∈ 1, · · · , 400. En este diagrama se puedever el valor de a de forma grafica como la pendiente de la recta que mejor ajustala nube de datos. Se han dibujado los datos correspondientes a la senal ym y losde yf3. Puede verse que las falsas medidas y el ruido presentes en ym hacen quela nube sea mas dispersa que en el caso filtrado. Ademas esta dispersion hace queel valor obtenido por mınimos cuadrados para el parametro a este distorsionadoy por tanto el modelo obtenido sea peor.
−1.5 −1 −0.5 0 0.5 1 1.5 2
−1.5
−1
−0.5
0
0.5
1
1.5
2
s(k)
s(k+
1)
Figura 5.5: Proyeccion de s(t+1) frente a s(t) para las senales s = ym (puntos verdes)
y s = yf3 (puntos negros).
2. Formacion de regresores candidatos y creacion de ventana deidentificacion
Consiste en crear vectores φ(t) ∈ Rn con las componentes adecuadas (entradasu y salidas y de la planta) y formar la ventana de identificacion. La ventana serepresenta mendiante una matriz de dimension: (tfin−tini +1)×(na+nb). Dondeel ancho (a = tfin− tini +1) se determina mediante el parametro de sintonizacionN3 (a = N3) (ver ecuacion 5.8), el valor inicial es tfinal = t y el valor inicialtini = tfin − a + 1. Siendo na y nb los grados de los polinomios del sistema (5.6).
3. Seleccion de un nuevo ejemplar

Capıtulo 5. Controlador predictivo adaptativo con identificacion simultanea 123
3.1 Deteccion de cambio de punto de operacion Para detectar un cam-bio de punto de operacion se calcula el incremento que sufren los re-gresores que componen la ventana de identificacion :
∆φ(t) = ‖φ(t)− φ(t + 1)‖
∀t = ini, · · · , f in y siendo ‖.‖ la distancia euclıdea en Rn.
Si el incremento del regresor mas reciente ∆φ(tfin) supera al mınimovalor de los restantes incrementos de regresores:
mın(∆φ(tini) . . . ∆φ(tfin−1))
mas un ǫ > 0, entonces es que existe un cambio de punto de funciona-miento.
∆φ(tfin) > min‖φ(t)− φ(t− 1)‖+ ǫ ∀t = ini, · · · , f in
Es importante crear regresores con las componentes filtradas y norma-lizadas. De este modo todas las componentes de φ tendran media nulay varianza unidad (o al menos estaran en el intervalo [−1, 1]).
La deteccion del punto de funcionamiento se puede activar o desactivar,segun el sistema que se desee identificar.
3.2 Evaluacion de la excitacion del regresor Si el regresor no ha sidoseleccionado con el punto anterior, esxiste otra posibilidad de seleccio-narlo mediante la evaluacion de la excitacion de las senales.
Supongamos que la memoria de ejemplares actuales en el instante tcontiene ne ejemplares que se denotan mediante e1 hasta ene.
Para tomar la decision de admision se procede calculando la distanciad de φ(t) al conjunto de ejemplares actuales. Dicha distancia se calculacomo
d = mıni‖φ(t)− ei‖
con i = 1, · · · , ne y siendo ‖.‖ la distancia euclıdea en Rn
Si la distancia d es mayor que cierto umbral (δ) se procede a insertar elnuevo ejemplar en la memoria de ejemplares actuales, en caso contrariose rechaza.
De este modo se consigue la suficiente excitacion pues los regresoresmuy similares a otros ya existentes son rechazados.
4. Memoria de ejemplares actuales
La memoria de ejemplares actuales es una matriz de dimension Nmeja× (na+nb) y contiene aquellos regresores con cierta riqueza dinamica, denominados ejem-plares. Como no es bueno que los ejemplares se queden permanentemente en la

124 5.2. Ventana de identificacion inteligente
memoria, para que pueda realizarse la adaptacion es conveniente sacar de la me-moria los ejemplares mas antiguos. Por ello se determina el valor de Nmeja y serechazan los ejemplares mas antiguos. La eliminacion no dana el funcionamientoen torno a un punto de operacion pues en tal caso un nuevo ejemplar sera se-leccionado para reemplazar al eliminado. Se debe indicar el valor maximo de lasfilas de la matriz de memoria de ejemplares actuales, se denota como maxmeja.
5. Creacion del conjunto ejemplar
El conjunto ejemplar consiste en una matriz de dimension variable. Es ne-cesario determinar el valor mınimo (Ncemin) y maximo (Ncemax) del numero deejemplares que lo constituyen. Por lo tanto el numero de filas es un valor com-prendido entre (Ncemin) y (Ncemax) ambos inclusives y el numero de columnas secorresponde con na + nb (ver ecuacion 5.6). El conjunto ejemplar debe contenerlos regresores con mayor riqueza dinamica. Con dicho conjunto se lleva a cabo laidentificacion del sistema. La creacion del conjunto ejemplar se realiza mediantela seleccion de los ejemplares mas recientes de la memoria de ejemplares actualesφ(k)conjunto ejemlar ∈ Θ Donde Θ es la memoria de ejemplares actuales.
Consideraciones
1 La estimacion de los parametros se lleva a cabo siempre y cuando el instantet se haya seleccionado un nuevo ejemplar y ademas se supere el numeromınimo de ejemplares (Ncemin) que constituyen el conjunto ejemplar.
2 El metodo vii tiene muchas posibilidades de ampliacion. Si el tamano maxi-mo de la memoria de ejemplares actuales coincide con el tamano maximodel conjunto ejemplar: maxmeja = Ncemax, se podrıa prescindir de ella,puesto que con el conjunto ejemplar serıa suficiente. Pero en cambio simaxmeja > Ncemax, se tendrıa una memoria del pasado con medidas bue-nas del sistema que podrıan dividirse dependiendo del punto de operaciony utilizarse en un momento determinado. En este caso se prescinde de lamemoria de ejemplares actuales, es decir, maxmeja = Ncemax, dejando parafuturas ampliaciones su posible utilizacion.
3 La diferencia entre el conjunto ejemplar y la ventana se muestra de una formaesquematica y clara en la grafica 5.6, donde se aprecia que la ventana con-tiene medidas consecutivas y pasadas desde el instante t hasta tini, mientrasque el conjunto ejemplar esta formado por medidas pasadas que no tienenpor que ser consecutivas, representan las senales con mayor excitacion y porlo tanto las mejores con las que se lleva a cabo la estimacion de parametros.Desechando ası las medidas redundantes y con poca excitacion.

Capıtulo 5. Controlador predictivo adaptativo con identificacion simultanea 125
t fna = t t ini 0
Ventana de identificación
Conjunto ejemplar
Figura 5.6: Diferencia entre ventana de identificacion y conjunto ejemplar
4 El conjunto ejemplar contiene aquellas medidas que poseen riqueza dinami-ca. Con los parametros δ y ǫ se define el grado de excitacion que debencumplir los ejemplares del conjunto ejemplar. El primer parametro repre-senta la distancia que debe existir entre le regresor candidato y las medidasdel conjunto ejemplar y el segundo parametro indica la distancia entre elincremento del regresor mas reciente (∆φ(t)) de la ventana y el resto deincrementos de los regresores de esta.
Variables de sintonizacion
Para el desarrollo del algoritmo de ventana de identificacion inteligente esnecesario sintonizar las variables que se describen en la tabla 5.2
Nomencaltura DescripcionN3 Dimension de ventana de identificacionδ Distancia maxima entre regresores candidatos y conjunto ejemplarǫ Distancia maxima entre regresores de la ventana de identificacion
maxmeja Dimension maxima de filas, de la memoria de ejemplares actualesNcemin Numero mınimo de ejemplares del conjunto ejemplarNcemax Numero maximo de ejemplares del conjunto ejemplar
Cuadro 5.2: Variables de sintonizacion del algoritmo ventana de identificacion inteli-
gente.
Todos los parametros de sintonizacion son muy intuitivos. A continuacion sedesglosa la eleccion de los valores para dichos parametros:

126 5.3. GPC adaptativo con ventana de identificacion inteligente
N3 Su valor depende del sistema con el que se trabaje, como la deteccion delpunto de operacion se detecta utilizando la ventana, es necesario asegurarque las muestras que contenga sean representativas del punto de operacionactual. De otro modo no se producira la necesaria adaptacion del modelolineal a las condiciones de trabajo cuando se utilice con plantas no lineales.
δ Mide el grado de excitacion que debe cumplir un regresor para ser seleccionadocomo ejemplar. Depende del ruido del sistema. Como valor inicial se lepuede dar la varianza del ruido e ir disminuyendo su valor hasta comprobarsu buen funcionamiento.
ǫ Mide el grado de variacion de las medidas y sirve para detectar un cambio depunto de operacion, al igual que el parametro anterior depende del ruido yse el valor inicial se puede igualar a la varianza del ruido, a partir de ahı esposible disminuir su valor y comprobar su comportamiento.
maxmeja Como se ha comentado anteriormente el valor maximo de la memoriaactual es igual al valor maximo del conjunto ejemplar: maxmeja = Ncemax.
Ncemin Representa el numero mınimo de medidas que contiene la nube de puntoscon la que se va a estimar los parametros. En general depende del numerode parametros estimados (Ljung 1987).
Ncemax Representa el numero maximo de medidas que contiene la nube de puntoscon la que se va a estimar los parametros. Depende del numero de parame-tros estimados (Ljung 1987) y del sistema, si existe cambio en la dinamicadel sistema, hay que buscar un compromiso entre alcanzar el nuevo puntode operacion y olvidar la dinamica anterior.
filtro En cuanto al filtro no causal, este estar bien ajustado para proporcionarproteccion ante falsas medidas sin impedir el paso de senales correctas convariaciones rapidas debidas a cambios en el punto de operacion.
5.3. GPC adaptativo con ventana de identifica-
cion inteligente
Consiste en realizar un controlador gpc adaptativo que incluya en el metodode estimacion de parametros, el algoritmo descrito anteriormente: ventana deidentificacion inteligente, de ahora en adelante lo denominaremos gpc-vii. Seimplementa considerando el principio de separacion.

Capıtulo 5. Controlador predictivo adaptativo con identificacion simultanea 127
El controlador gpc consiste en minimizar la funcion de coste (5.9), sujeta alas restricciones (5.3):
mın∆u
J =N2∑
j=N1
δ(j)[y(t + j | t)− w(t + j)]2 +Nu∑
j=1
λ(j)[u(t + j − 1)]2 (5.9)
s.a ∆umin ≤ ∆u ≤ ∆umax
umin ≤ u ≤ umax
ymin ≤ y ≤ ymax
y(t + N2 + j) = w(t + N2 + 1) ∀j = 1 . . . m (5.10)
Donde, N1 y N2 son el mınimo y el maximo del horizonte de prediccion (to-mando como N1 = d+1 y N2 = d+N), Nu es el horizonte de control, δ(j) y λ(j)son las secuencias de los pesos de los terminos de la funcion de coste. w(t + j)es la referencia futura o la secuencia de referencia, u(t) es la accion de controlincremental (u(t) = u(t) − u(t − 1)), y(t + j | t) es la prediccion j de la salidadel sistema en el instante t. y(t − j + 1 | t) representa la salida real del sistemaen el pasado en el instante t.
Ademas de las restricciones de entrada, salida e incremento de entrada se haincluido la restriccion terminal,donde m = n + 1 siendo n el orden del sistema(crhpc) (Clarke & Scattolini 1991) para garantizar la estabilidad,
En este apartado se llevan a cabo una serie de experimentos, con objeto derealizar una comparativa entre el controlador gpc-vii y el gpc autoajustable.
5.3.1. Resultados de simulacion y comparativa de contro-ladores
Simulacion I
Para el primer ejemplo se ha elegido un sistema de primer orden, al cual,se le ha incluido un ruido de media nula y varianza 0,05 con una distribuciongaussiana. Ademas se ha anadido errores de medida en la senal de salida.

128 5.3. GPC adaptativo con ventana de identificacion inteligente
El proceso se simula durante 700 instantes de tiempo, con la siguiente plantade primer orden:
G(z−1) =0,2z−1
1− 0,8z−1
Para la realizacion de la simulacion se han escogido los mejores valores de losparametros de sintonizacion de ambos controladores. Dichos valores se muestranen la tabla 5.3
N1 N2 Nu N3 λ Ncmin Ncmax filtro factor de olvido0 10 10 50 1 5 50 0.80 0.89
Cuadro 5.3: Simulacion I: Sintonizacion de parametros
Con el fin de hacer mas clara la comparacion entre los controladores se hautilizado una tabla (5.4) comparativa donde se incluyen los resultados del contro-lador gpc autoajustable y varias simulaciones realizadas del controlador gpc-vii,donde se varıan los parametros δ y ǫ. En la tabla se muestran el porcentaje deejemplares utilizados para la estimacion del gpc-vii y los ındices ECMy, ECMa
y ECMb, para ambos controladores que representan el error cuadratico medio dela salida, del parametro a y del parametro b respectivamente.
GPC GPCautovii ajustable δ ǫ ejemplares( %) ECMy ECMa ECMb
x - - - 0.1265 0.0190 0.0128x (1) 0.1 0.01 71.9237 0.1124 0.0082 0.0015x (2) 0.1 0.1 68.9775 0.1126 0.0070 0.00187x (3) 0.1 0.5 35.7019 0.1127 0.0056 0.0022x (4) 0.5 0.5 34.4887 0.1123 0.0040 0.0024x (5) 1 1 22.8426 0.1097 0.0060 0.0012
Cuadro 5.4: Simulacion I: gpc-vii vs gpc autoajustable
Como se puede observar, en todos los casos, el controlador gpc-vii se compor-ta mejor que el controlador gpc autoajustable. Incluso en la ultima simulacion(5), donde el conjunto ejemplar solo se compone del 23 % de medidas, aproxima-damente.
En la figura 5.7, se muestran las senales de salida y(t+1) frente y(t) del ejemploanterior, concretamente el experimento 5. Se representan la salida simulada (y),la salida filtrada (yf ) y los ejemplares utilizados por el algoritmo de identificaciondel controlador gpc-vii. El metodo de identificacion fuerza a realizar la estimacionde parametros con las medidas que poseen riqueza dinamica, rechazando aquellasredundantes y las que no superan una cierta distancia entre ellas (ǫ) y de losejemplares que constituyen el conjunto ejemplar (δ) .

Capıtulo 5. Controlador predictivo adaptativo con identificacion simultanea 129
−0.2 0 0.2 0.4 0.6 0.8 1 1.2
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
y(k)
y(k+
1)
ejemplares y yf
Figura 5.7: Simulacion I (5). Proyeccion de y(t + 1) frente y(t) de las senales: salida
simulada (y), salida simulada filtrada (yf ) y ejemplares utilizados
Simulacion II
En la segunda simulacion se ha elegido un experimento representativo dondese tiene en cuenta el ruido, errores en la medicion de senales y cambio brusco enla dinamica de la planta.
El proceso se simula con una planta de primer orden con cambios en losparametros:
G(z−1) =−0,009546z−1
1− 0,89654z−10 < t < 1500
G(z−1) =−1z−1
1− 0,627z−1t ≥ 1500
Se ha anadido un ruido blanco de media nula y varianza 10−7, procedente deuna distribucion normal. Ademas en los instantes de tiempo 1000 y 2000 se haninsertado en la senal de salida medidas erroneas.
La sintonizacion de ambos controladores se muestra en la tabla 5.5:

130 5.3. GPC adaptativo con ventana de identificacion inteligente
N1 N2 Nu N3 λ Ncmin Ncmax filtro factor de olvido0 10 10 180 1 5 40 0.6 0.98
Cuadro 5.5: Simulacion II: Sintonizacion de parametros
La comparacion se ha llevado a cabo con diferentes valores de los parametrosδ y ǫ y los resultados se pueden ver en la tabla 5.6. Donde se pone de manifiestoque para la estimacion de parametros con un conjunto ejemplar tanto del 38 %como del 82 % aproximadamente, el controlador gpc-vii supera notablemente elcomportamiento del gpc autoajustable.
GPC GPCauto
vii ajustable δ ǫ ejemplares(%) ECMy ECMa ECMb
x (2) - - - 12.7943 0.0602 0.0937x (1) 5 · 10−5 5 · 10−6 38.1480 6.8066 0.0084 0.0424x (2) 5 · 10−6 5 · 10−7 81.6589 10.4513 0.0052 0.0252
Cuadro 5.6: Simulacion II: gpc-vii vs gpc autoajustable
En la figura 5.12 se muestran los valores de los parametros reales junto a losestimados mediante los dos controladores (mejor ajustados: gpc-vii (1)). Se harealizado un aumento en el eje de coordenadas con el objeto de ofrecer la compa-racion mas clara, puesto que el resultado de la estimacion, el gpc autoajustablecalcula unos valores demasiado altos en los instantes de tiempo crıticos. Comopor ejemplo, en la muestra 1000, uno de los instantes donde se han anadido me-didas erroneas en las salida del proceso y en la muestra 1500 donde se produce elcambio en la dinamica de la planta.
Por otra parte, el controlador gpc autoajustable tarda mucho mas tiempo queel gpc-vii en estimar los nuevos parametros del proceso. El valor del parametroδ sirve para obtener un conjunto ejemplar con medidas con una distancia δ en-tre ellas. A su vez el parametro ǫ, establece la distancia entre las medidas de laventana de identificacion con la que se detecta un cambio en dichas senales, porejemplo un nuevo punto de funcionamiento. Como el algoritmo de estimacion deparametros trabaja con el conjunto ejemplar, no solo con una unica media pasada,como es el caso del gpc autoajustable, la nube de puntos para obtener la regre-sion lineal posee mucha mas informacion para hallar los estimadores correctos ydesechar otras posibles soluciones.
Simulacion III
Con el metodo de mınimos cuadrados recurrente es necesario realizar un se-guimiento de la matriz de covarianza P (t), de forma que se pueda detectar un

Capıtulo 5. Controlador predictivo adaptativo con identificacion simultanea 131
500 1000 1500 2000 2500 3000−2
−1
0
1
pará
met
ro a
500 1000 1500 2000 2500 3000−1.5
−1
−0.5
0
0.5
pará
met
ro b
GPC auto aj. GPC−vii valor real
Falsas medidas
Figura 5.8: Simulacion II. Valores reales y estimados de los parametros del modelo
mediante gpc-vii y gpc autoajustable
mal funcionamiento en la estimacion de parametros. Se puede dar el caso quedicha matriz decrezca monotonamente, cuando el factor de olvido es cercano auno, lo que conllevarıa a la anulacion del mecanismo de identificacion. O por elcontrario podrıa ser que la matriz de covarianza creciera exponencialmente, si elpunto de trabajo no varıa, lo que volverıa al identificador muy sensible a cualquiertipo de cambio y al ruido, pudiendo llevar al controlador en bucle cerrado a lainestabilidad. Todos estos problemas se resolverıan si el factor de olvido variarasegun el proposito.
Con el algoritmo de identificacion denominado ventana de identificacion in-teligente, propuesto en esta tesis, no harıa falta anadir nada mas, para que losproblemas anteriores no ocurran. Solo es necesario ajustar bien todos los parame-tros de sintonizacion.
Para poner de manifiesto lo explicado, se ha llevado a cabo una simulacionrealizada mediante la siguiente funcion de transferencia: G(z−1) = 0,2z−1
1−0,8z−1 y se hasimulado durante 5000 instantes de tiempo. Al inicio de la simulacion no existeruido y a partir del instante 4200 se ha anadido un ruido de varianza 0,001 ymedia nula con una distribucion gaussiana.
La sintonizacion de ambos controladores se puede apreciar en la tabla 5.7.

132 5.4. Controlador predictivo adaptativo con identificacion simultanea
N1 N2 Nu N3 λ Ncmin Ncmax filtro factor de olvido0 10 10 100 1 5 100 0.6 0.9888
Cuadro 5.7: Simulacion III: Sintonizacion de parametros
Y los valores resultantes de la comparacion se muestran en la tabla 5.8. Dondese destaca que los errores cometidos por el controlador gpc-vii, a la hora dela estimacion de parametros son notablemente inferiores a los producidos por elcontrolador gpc autoajustable. Mientras que el error cuadratico medio de la salidadel proceso con respecto a la referencia, es menor en el segundo controlador queen el primero, pero la diferencia resulta ser despreciable (4,8261e−4). Es necesariodestacar que el controlador gpc-vii solo necesita, aproximadamente, el 4 % delas medidas totales para la estimacion de los parametros.
GPC GPCauto
vii ajustable δ ǫ ejemplares ECMy ECMa ECMb
x - - - 2.2288e-004 0.3153 0.3153x 0.01 0.01 4.2677 7.0549e-004 1.0780e-004 7.8918e-005
Cuadro 5.8: Simulacion III : gpc-vii vs gpc autoajustable
En la figura 5.9, representan los valores de los parametros reales junto a losestimados por ambos controladores. Como se puede apreciar, en el instante dondecomienza el ruido (4200), el controlador gpc autoajustable, estima unos valoresincorrectos mientras que el controlador gpc-vii continua funcionando perfecta-mente.
En la figura 5.10, se representan las senales y(t) e y(t+1), de la senal de salidafiltrada total y de las senales que han formado parte del conjunto ejemplar.
5.4. Controlador predictivo adaptativo con iden-
tificacion simultanea
El controlador predictivo con identificacion simultanea (gpcc) (Nunez-Reyes& Bordons 2005) esta basado en el control predictivo generalizado (GeneralizedPredictive Control, gpc), que consiste en aplicar una secuencia de control queminimiza una funcion de coste multietapa que considera el seguimiento de lareferencia y el esfuerzo de control.
El controlador propuesto extiende la funcion de coste del original gpc (Clarke,

Capıtulo 5. Controlador predictivo adaptativo con identificacion simultanea 133
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000−1
−0.5
0
0.5
1
pará
met
ro a
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
0.5
1
1.5
2
muestras
pará
met
ro b
GPC autoajustable GPC vii valor real
Figura 5.9: Simulacion III. Valores reales y estimados de los parametros del modelo
mediante gpc-vii y gpc auto autoajustable
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70
0.1
0.2
0.3
0.4
0.5
0.6
0.7
y(k)
y(k+
1)
ejemplares yf
Figura 5.10: Simulacion III (5). Proyeccion de y(t + 1) frente y(t)
Mohtadi & P.S.Tuffs 1987b) anadiendo un termino que comprende el error de laidentificacion, utilizando una funcion de coste que incluye el seguimiento del errory el esfuerzo de control (como cualquier controlador gpc) ademas del error de la

134 5.4. Controlador predictivo adaptativo con identificacion simultanea
identificacion en un horizonte de prediccion pasado y futuro. Este metodo suponela integracion del problema de control y el problema de la identificacion en solouna funcion objetivo.
Si la funcion de coste se minimiza con respecto a los parametros estimados delmodelo y con respecto a la accion de control nos encontramos ante un controladordual con horizonte finito. La accion de control se calcula teniendo en cuenta elerror de modelado.
5.4.1. Desarrollo
En este apartado se lleva a cabo un estudio teorico del controlador propuestotanto para modelos de orden n como para modelos de primer orden. Ademas, elcontrolador se modifica levemente con objeto de incluir el retardo del modelo enla estimacion de parametros.
5.4.1.1. Modelos de orden n
Para el controlador propuesto se requiere un simple modelo lineal de orden n.La funcion objetivo es la siguiente:
mınx
J =N2∑
j=N1
δ(j)[y(t + j | t)− w(t + j)]2 +Nu∑
j=1
λ(j)[∆u(t + j − 1)]2 +
+N3∑
j=1
γ(j)[y(t− j + 1)− φ−θ]2
s.a ∆umin ≤ ∆u ≤ ∆umax, umin ≤ u ≤ umax
ymin ≤ y ≤ ymax, aimin≤ ai ≤ aimax
bkmin≤ bk ≤ bkmax
, dmin ≤ d ≤ dmax
∀i = 1 . . . na y ∀k = 1 . . . nb, donde N1 y N2 son el mınimo y el maximodel horizonte de prediccion (tomando como N1 = d + 1 y N2 = d + N), Nu
es el horizonte de control y N3 es el horizonte de identificacion, d es el retardo

Capıtulo 5. Controlador predictivo adaptativo con identificacion simultanea 135
del modelo del proceso de entrada-salida y δ(j), λ(j) y γ(j) son las secuenciasde los pesos de los terminos de la funcion de coste. w(t + j) es la referenciafutura o la secuencia de referencia, u(t) es la accion de control incremental(u(t) = u(t)−u(t− 1)), y(t+ j | t) es la prediccion j de la salida del sistema enel instante t. y(t− j + 1 | t) representa la salida real del sistema en el pasado enel instante t. φ es la matriz de regresion, θ es el vector de parametros estimadosy finalmente ai, bi, d, son los parametros de la funcion de transferencia de lospolinomios discretos de grado na y nb como se muestra mas adelante.
Si se utiliza un modelo carima y el polinomio del ruido es 1, se obtienen lassiguientes ecuaciones2:
A(z−1)y(t) = z−dB(z−1)u(t− 1) +ǫ(t)
∆(5.11)
Donde A y B son los polinomios que se describen a continuacion con el ope-rador retardo z−1:
A(z−1) = 1 + a1z−1 + a2z
−2 + . . . + anaz−na (5.12)
B(z−1) = b0 + b1z−1 + b2z
−2 + . . . + bnbz−nb
entonces la mejor prediccion de salida y(t + d + j | t) se obtiene mediante laecuacion siguiente:
y(t + d + j|t) = (1− a1)y(t + d + j − 1 | t) + (5.13)
(a1 − a2)y(t + d + j − 2 | t) + . . . +
anay(t + d + j − na− 1 | t) + b0∆u(t + j − 1) +
b1∆u(t + j − 2) + . . . + bnb∆u(t + j − 1− nb)
Si la ecuacion (5.13) se aplica recurrentemente para j = 1, 2, . . . , N , el vectorde prediccion se obtiene mediante la ecuacion expresada de forma condensadacomo:
y = Gu+ + Sy− + Hu− (5.14)
2Los parametros ai, bi y d dependen del tiempo.

136 5.4. Controlador predictivo adaptativo con identificacion simultanea
Donde y, u+, y− y u− son vectores de dimensiones N × 1, Nu × 1, (na + 1)× 1 ynb× 1 respectivamente.
y =
y(t + d + 1 | t)y(t + d + 2 | t)
. . .y(t + d + N | t)
u+ =
∆u(t)∆u(t + 1)
. . .∆u(t + Nu − 1)
y− =
y(t + d | t)y(t + d− 1 | t)
. . .y(t + d− na | t)
u− =
∆u(t− 1)∆u(t− 2)
. . .∆u(t− nb)
G, S y H son matrices de dimensiones N ×Nu, N × (na + 1) y N × nb, respec-tivamente. Las siguientes ecuaciones muestran como se obtienen dichas matricespara sistemas de orden n de una manera estandar.
G es una matriz triangular inferior, la cual toma la forma:
G =
g0 0 . . . 0g1 g0 . . . 0...
......
...gN gN−1 . . . g0
y sus elementos se obtienen mediante las siguientes ecuaciones:
g0 = b0
gj =j
∑
i=1
aigj−i +j−1∑
i=0
bi j = 1, . . . , N (5.15)
si j < 0 ⇒ gj = 0
S se calcula
s1,j = −aj+1, j = 1, . . . , na
si,j =i−1∑
k=1
s1,ksi−k,j (5.16)
i = 2, . . . , N ; j = 1, . . . , na
Donde a y na son los elementos y grado respectivamente del polinomio A(z−1),que corresponde a, A(z−1) = ∆A(z−1) = (1− z−1)A(z−1).

Capıtulo 5. Controlador predictivo adaptativo con identificacion simultanea 137
H se obtiene como sigue
h1,j = bj, j = 1, . . . , nb
hi,j =i−1∑
k=1
(ak+1hi−k,j) + h1,i+j−1 (5.17)
i = 2, . . . , N ; j = 1, . . . , nb
Y finalmente φ es la matriz de regresion de dimension N3 × (na + nb + 1) yθ constituye el vector de parametros que deben ser identificados, de dimension(na + nb + 1)× 1, los cuales se calculan en cada instante de tiempo utilizando elhorizonte pasado de identificacion.
φ = [y(t− j) y(t− j − 1) . . . y(t− j − na)
∆u(t− d− j) . . . ∆u(t− d− j − nb)] (5.18)
θ = [ 1− a1(t) a1(t)− a2(t) . . . ana(t) (5.19)
b0(t) . . . bnb(t)]T
Las variables de decision del problema propuesto son las siguientes:
x = [a1(t) . . . ana(t) b0(t) . . . bnb(t) d(t) (5.20)
∆u(t) ∆u(t + 1) . . . ∆u(t + Nu − 1) ]T
La complejidad del algoritmo de optimizacion crece con respecto al orden delsistema y el valor del horizonte de control.
5.4.1.2. Modelos de primer orden
La mayorıa de los procesos industriales, cuando se consideran pequenos cam-bios alrededor del punto de operacion, se pueden describir mediante modeloslineales de normalmente, alto orden. Ya que la mayorıa de los procesos industria-les estan compuestos de muchos elementos dinamicos, normalmente de primerorden, el modelo completo sera de igual orden al numero de elementos. De hecho

138 5.4. Controlador predictivo adaptativo con identificacion simultanea
cada elemento de almacenamiento de masa o energıa suministra un elemento deprimer orden en el modelo.
Por ejemplo consideremos una tuberıa cuyo objetivo consiste en intercambiarcalor como en el caso de los colectores solares. La tuberıa se puede modelardescomponiendola en un conjunto de elementos cada uno de los cuales se puedeconsiderar de primer orden. El modelo resultante tendra un orden igual al numerode elementos usados para modelar la tuberıa, es decir sera de alto orden lo quepodrıa dificultar la implementacion del controlador. Pero afortunadamente, esposible aproximar cada uno de los procesos de alto orden por modelos con unaconstante de tiempo y un retardo.
Como se muestra en (Deshpande & Ash 1981), se puede considerar un modelode proceso de N elementos de primer orden en serie. Cada uno de ellos tiene unaconstante de tiempo τ/N . La funcion de transferencia resultante se describe dela siguiente forma:
G(s) =1
(1 + τN
s)N
Cambiando del valor de N desde 1 hasta ∞, la respuesta pasa a ser de unmodelo de primer orden exacto a un retardo puro igual a τ . Cuando una de lasconstantes de tiempo es mucho mayor que las otras, las constantes de tiempomas pequenas se pueden modelar como un retardo puro. En estas situaciones,los efectos de la dinamica son principalmente debidos a las constantes de tiempograndes. Por consiguiente es posible aproximar la dinamica de un proceso com-plejo con un modelo de alto orden por un modelo simplificado que consiste enmodelos de primer orden con retardo. Este tipo de sistemas se pueden describirmediante la funcion de transferencia siguiente:
G(s) =K
1 + τse−sτd (5.21)
donde K representa la ganancia estatica del proceso, τ es la constante detiempo del proceso y and τd es el retardo o tiempo muerto.
La planta controlada se puede describir mediante este tipo de modelos. Si eltiempo de muestreo es multiplo del retardo, la funcion de transferencia discretase obtiene de la siguiente manera:
G(z−1) =bz−1
1− az−1z−d

Capıtulo 5. Controlador predictivo adaptativo con identificacion simultanea 139
En este caso na = 1 y nb = 1 por lo que la metodologıa mostrada se reduceconsiderablemente. Por consiguiente φ y θ se reducen a las dimensiones N3 × 3 y3× 1 respectivamente.
φ = [y(t− j − 1) y(t− j − 2) ∆u(t− d− j)]
θ =[
1− a(t) a(t) b(t)]T
(5.22)
Y el numero de variables de decision dependen solo del horizonte de control,no de los parametros estimados del modelo. La dimension del vector x es de 3+Nu
elementos:
x = [ a(t) b(t) d(t) ∆u(t) ∆u(t + 1) (5.23)
. . . ∆u(t + Nu − 1) ]T
Como consecuencia, el problema de optimizacion se reduce y la complejidaddel algoritmo crece linealmente con respecto el horizonte de control, siendo lacomplejidad del algoritmo independiente de los parametros del modelo.
5.4.1.3. Problema de optimizacion
El problema de optimizacion esta compuesto por una funcion objetivo bilineal(la estimacion de los parametros de modelo se ve afectada por la accion de controly viceversa) sujeta a restricciones de desigualdad, algunas son la tıpicas del mpc yotras estan impuestas por los parametros del modelo. Ademas existe una variablede decision entera (retardo d).
Por consiguiente nos encontramos ante un problema de optimizacion no linealmixto (Mixed Integer Non-Linear Programming (minlp)). La determinacion deuna solucion global para un problema minlp no convexo es NP-completo. Estetipo de problemas lleva consigo una alta carga computacional, principalmente sise desea encontrar el mınimo global. Existen algoritmos disponibles en el mercadotipo Branch&Bound para resolver este tipo de problemas con la ayuda del usuario,quien puede influenciar la eleccion de la variable podada mediante prioridades de

140 5.4. Controlador predictivo adaptativo con identificacion simultanea
las variables enteras. De todas formas este tipo de problemas no es facil de resolveron-line.
Por lo tanto es necesario simplificar el metodo de tal forma que se pueda utili-zar en tiempo real. Para ello se han llevado a cabo las siguientes aproximaciones:
a) Para resolver el problema de optimizacion se ha utilizado la funcion (fmin-con) que pertenece al conjunto de herramientas de optimizacion de Matlab.Dicha funcion implementa un algoritmo que usa una busqueda basada enlas derivadas y no garantiza el mınimo global. Todos los argumentos de lafuncion se pueden modificar para alcanzar un compromiso aceptable entreel tiempo de ejecucion y la solucion suboptima.
b) Por otra parte el problema de optimizacion se ha relajado, la variable enterase ha tratado como variable real, de esta forma el problema de optimizacionse convierte en un problema no lineal (Non-Linear Programming (NLP))donde todas las variables de decision son reales.
Los parametros de sintonizacion del controlador propuesto son los siguientes:
1) Horizonte de control: Nu.
2) Horizonte de prediccion: N1 = d + 1, N2 = d + N .
3) Horizonte de identificacion: N3.
4) Factor de peso del error de salida: δi.
5) Factor de peso de la accion de control: λi.
6) Factor de peso de la identificacion: γi.
Por ultimo destacar, que el controlador gpcc utiliza el metodo ventana deidentificacion inteligente descrito en el capıtulo 1,2.
5.4.2. Resultados de simulacion y comparativa de contro-ladores
Se han llevado a cabo varios estudios en simulacion, con el objeto de realizaruna comparativa entre el metodo propuesto y los controladores gpc autoajustabley gpc-vii.

Capıtulo 5. Controlador predictivo adaptativo con identificacion simultanea 141
Simulacion I
El objetivo de la siguiente simulacion consiste en la comparacion de tres con-troladores: str, gpcc y gpc dual. Para ello se ha elegido un proceso de primerorden con cambios bruscos en los parametros:
G(z−1) =−0,009546z−1
1− 0,89654z−10 < t < 400
G(z−1) =−1z−1
1− 0,627z−1400 ≤ t < 700
G(z−1) =0,5z−1
1− 0,5z−1t ≥ 700
Se ha anadido un ruido blanco de media nula y varianza 0,000001, procedentede una distribucion normal.
El valor de los paramatros de sintonizacion de los tres controladores se muestraen la tabla 5.11.
N1 N2 Nu N3 λ δ γ Ncmin Ncmax filtro factor de olvido0 10 10 180 1 1 100 5 40 0.6 0.7888
Cuadro 5.9: Simulacion I: Sintonizacion de parametros
Controlador δ ǫ ejemplares( %) ECMy ECMa ECMb
gpc auto aj. - - - 34.4209 96.3973 3.5495gpc-vii 0.0001 0.00001 28.3563 0.0990 0.0158 0.0355gpcc 0.0001 0.0001 16.4366 0.0518 0.0011 0.0153
Cuadro 5.10: Simulacion I: Comparativa de los controladores: gpc autoajustable,
gpc-vii y gpcc
En la figura 5.11 se muestran los valores de los parametros reales junto conlos estimados mediante los dos controladores.
Simulacion II
El siguiente ejemplo consiste en la simulacion de un modelo de primer ordencon ruido de media nula y varianza 0,000001, donde los parametros del mismovarıan suavemente segun una rampa de pendiente 0,0002:
G(z−1) =1z−1
1− 0,8z−1

142 5.4. Controlador predictivo adaptativo con identificacion simultanea
300 400 500 600 700 800 900 1000−2
−1
0
1
2pa
rám
etro
a
300 400 500 600 700 800 900 1000−2
−1
0
1
2
pará
met
ro b
GPCC GPC autoaujustable GP Cvii valor real
Figura 5.11: Simulacion I. Valores reales y estimados de los parametros del modelo.
a = −0,8 + 0,0002t
b = 1− 0,0002t
Y se pretende comparar el comportamiento de los controladores: gpc autoajus-table, gpc-vii y gpcc.
El valor de los parametros de sintonizacion de los tres controladores se muestraen la tabla 5.11.
N1 N2 Nu N3 λ δ γ Ncmin Ncmax filtro factor de olvido0 10 10 200 1 1 5 5 10 0.6 0.8
Cuadro 5.11: Simulacion II: Sintonizacion de parametros
Se ha llevado a cabo una simulacion de 2000 instantes de tiempo. El resultadodel experimento se muestra en la tabla 5.12. Se puede observar que el comporta-miento del controlador gpcc es mejor que la de los otros dos controladores. Elerror cuadratico medio de la salida es practicamente igual en todos los controla-dores, siendo un poco mayor el correspondiente al controlador gpc autoajustable.El controlador que no utiliza la ventana de identificacion inteligente, es el que sealeja mas de los valores reales de los parametros.
Se trata de un sistema mal condicionado, que como tal, posee multiples solu-ciones. A pesar de resolver el problema del controlador gpcc con un algoritmo

Capıtulo 5. Controlador predictivo adaptativo con identificacion simultanea 143
Controlador δ ǫ ejemplares( %) ECMy ECMa ECMb
gpc auto aj. - - - 1.6678e-006 0.0439 0.1081gpc-vii 0.05 0.000005 51.3633 1.4360e-006 0.0036 0.0100gpcc 0.05 0.000005 53.0120 1.4918e-006 0.0001 0.0002
Cuadro 5.12: Simulacion II: Comparativa de los controladores: gpc autoajustable,
gpc-vii y gpcc
de optimizacion que no garantiza el mınimo global, obtiene, en este ejemplo, unamejor solucion que el metodo de los mınimos cuadrados y que la solucion elegidapor el controlador gpc-vii.
En la figura 5.12 se muestran los valores de los parametros reales junto conlos estimados mediante los tres controladores.
500 1000 1500 2000−1.5
−1
−0.5
0
pará
met
ro a
500 1000 1500 2000−1
0
1
2
pará
met
ro b
GPCC GPC auto aj. valor real GPC vii
Figura 5.12: Simulacion II. Valores reales y estimados de los parametros del modelo.

144 5.5. Aplicacion real. Control de la temperatura del campo solar
5.5. Aplicacion real. Control de la temperatura
del campo solar
El circuito de captacion solar junto a la maquina de absorcion constituyendos de los principales componentes de un sistema de refrigeracion solar. Paralograr un buen comportamiento del sistema completo es necesario el correctofuncionamiento de dichos subsistemas.
Generalmente la temperatura de salida de los colectores de un sistema derefrigeracion solar debe ser mas alta que la de un sistema de agua caliente sanitaria(acs) con energıa solar termica. Los componentes del circuito solar en un sistemade refrigeracion solar son similares a los componentes de un acs, sin embargo, elcontrol del primer sistema es mucho mas complejo que el del segundo.
En un sistema de refrigeracion solar, la energıa solar no tiene por que seralmacenada en los tanques antes de ser usada, mientras en los sistemas acses imprescindible que el agua caliente se acumule en los tanques antes de serutilizada. Dependiendo del modo de funcionamiento, la energıa solar puede serdistribuida entre los tanques y la maquina de absorcion, conducida directamentehacia el equipo de absorcion o hacia los tanques. Tambien es posible recircular elagua por los colectores solares.
Al igual que para cualquier otro proceso industrial, el control del agua calienteproveniente de los colectores depende del diseno y de la configuracion de loscomponentes del sistema.
La actualizacion del modelo es particularmente importante en procesos en losque las condiciones de operacion varıan en el tiempo, donde los parametros delsistema se encuentran continuamente cambiando. En los procesos donde existentransporte de materia (como es el caso del campo solar) la constante de tiempocaracterıstica y el retardo se ven afectados por los cambios de caudal, repercu-tiendo en la dinamica del proceso, que varıa durante la operacion.
El control de la temperatura de colectores solares es muy complejo puesto quela fuente de energıa (radiacion solar) no es manipulable (Camacho et al. 1997b)y se encuentra continuamente variando, lo que produce un constante cambio decaudal para conseguir el seguimiento de la referencia, provocando cambios en ladinamica del proceso. Numerosas estrategias de control se han aplicado a dichasplantas, desde los clasicos pids a mpc (Nunez-Reyes, Normey-Rico, Bordons &Camacho 2005).

Capıtulo 5. Controlador predictivo adaptativo con identificacion simultanea 145
Para paliar los problemas mencionados se propone la utilizacion de controladorgpcc propuesto en esta tesis. En cuanto a la compensacion de perturbaciones,se utiliza un controlador por adelanto en serie que permite reducir o eliminar elefecto de las variaciones en la radiacion solar y en la temperatura de entrada alcampo solar.
5.5.1. Compensacion de perturbaciones. Control en ade-
lanto
5.5.1.1. Introduccion
La presencia de las perturbaciones en un proceso puede ser debida a dife-rentes factores. Los sensores de medida pueden contener errores de calibraciono ruidos de alta frecuencia, la salida del proceso se puede ver afectada por lasdemas variables del proceso que no pueden ser manipuladas (perturbaciones enla carga) y ademas cuando se trabaja con modelos lineales, las propias variacio-nes en los parametros del modelo lineal son vistas (por el modelo nominal) comoperturbaciones que afectan al proceso.
Existen varias formas de compensar las perturbaciones de los procesos. Las so-luciones clasicas que eliminan o reducen las perturbaciones son: el uso del controlpor realimentacion, el control en adelanto o control por prealimentacion (feed-forward) y la utilizacion de la prediccion cuando esta no es medible. No es masque una extension del control en adelanto donde se utiliza la prediccion de laperturbacion ante la imposibilidad de medirla. La estructura de control por ade-lanto ha sido utilizada en numerosas estrategias de control aplicadas a determi-nadas plantas solares, como por ejemplo: (Cardoso, Henriques & Dourado 1999),(Carotenuto, Cava, Muraca & Raiconi 1986), (Meaburn & Hughes 1996), (Silva,Filatov, Lemos & Unbehauen 1998) y (Valenzuela & Balsa 1998).
El esquema del control en adelanto se representa en la figura 5.13 y su fun-cionamiento es el siguiente: primero se mide la perturbacion y posteriormente seintroduce una senal de control que elimina su efecto. La funcion de transferenciaideal del control en adelanto serıa Hca = −H−1
p Hw donde Hp es la funcion detransferencia que relaciona la salida del proceso y con la senal de control u yHw es la funcion de transferencia que relaciona la salida y con la perturbacionmedible w. Si la funcion de transferencia Hca resulta impropia se calcula unaaproximacion.

146 5.5. Aplicacion real. Control de la temperatura del campo solar
Hca
Hw
Hp
+ +
+ + y
w
Proceso
Controlador
u_ca
u ref +
-
Figura 5.13: Esquema basico del control en adelanto
Un colector solar puede ser modelado como un intercambiador de calor queabsorbe parte de la radiacion solar calentando el agua que circula por el y sufrien-do algunas perdidas termicas. Las ecuaciones que representan su comportamientose pueden obtener mediante el siguiente balance de energıa:
Ca
dTscm
dt= F (IG + U(Tamb − Tscm) +
2mscCp
AC
(Tsci − Tscm)
Tsco = 2Tscm − Tsci
donde Tsc,m es la temperatura media del agua dentro del captador (C), Tsc,i esla temperatura de entrada, Tamb la temperatura ambiente en C, CA la capacidadcalorıfica por unidad de superficie del colector (J/m2 C), Cp la capacidad ca-lorıfica del agua(J/kg C), U es el coeficiente de perdidas a la atmosfera (W/m2
C), IG la radiacion solar en la superficie del colector (W/m2), AC el area delcolector (m2), F es el factor de eficiencia y msc el caudal masico que circula porel captador (kg/s). La temperatura de salida del agua del colector, Tsc,o se obtieneasumiendo que la distribucion de la temperatura es lineal.
El modelo dado por las ecuaciones anteriores y otros similares se pueden ver en:(Klein, Duffie & Beckman 1974), (Rorres, Orbach & Fischl 1980), (Orbach, Rorres& Fischl 1981), (Carotenuto, Cava & Raiconi 1985), (Carotenuto et al. 1986),(Camacho, Rubio & Gutierrez 1988) y (Camacho, Berenguel & Rubio 1997a).
Utilizando valores experimentales y la ecuacion que modela el circuito solar enregimen permanente, se ha obtenido una correlacion entre la temperatura de sa-lida de colectores real con las demas variables. Dicha ecuacion sirve para obtener

Capıtulo 5. Controlador predictivo adaptativo con identificacion simultanea 147
el caudal de agua deseado. En la figura 5.14 se muestran los datos reales con losque se ha realizado la correlacion junto a los datos simulados. La ecuacion se havalidado con un conjunto de datos diferentes; en la mayorıa de ellos su compor-tamiento es aceptable pero no siempre es tan bueno como el que se muestra en lafigura. Cuanto mejor se comporte la ecuacion menos actuaciones realizara el con-trol en bucle cerrado. El control en adelanto se puede aplicar con dos estructuras
100 150 200 250 300 350 40056
58
60
62
64
66
68
tiempo
Tª
(ºC
)
Tsc modeladaTsc realTec real
Figura 5.14: Temperatura de salida de colectores real versus temperatura de salida
de colectores modelada
diferentes: en paralelo o en serie. A continuacion se detalla su funcionamiento.Para la compensacion de las perturbaciones en el control de la temperatura delcampo solar se ha desarrollado un controlador en adelanto en serie basado en elbalance energetico en regimen permanente descrito anteriormente.
5.5.1.2. Controlador en adelanto en paralelo
El control en adelanto en paralelo sigue el esquema 5.15. Donde la variableuff representa el caudal calculado por el control en adelanto segun la radiacionsolar, la temperatura ambiente y la temperatura de entrada al campo solar.
Como se muestra en la figura, la senal de control total es la suma del caudalcalculado por el controlador adaptativo gpcc y el control en adelanto. La estima-cion de los parametros se realiza desde los puntos que indica la figura. Existe unproblema desde este punto de vista, el algoritmo de estimacion de los parametros

148 5.5. Aplicacion real. Control de la temperatura del campo solar
Control por adelanto
GPCC Planta Solar u GPCC
u FF
+
+ u TOTAL
+
-
Ref
I rr T e T amb
T s
Identificación
Figura 5.15: Controlador en adelanto en paralelo
no diferencia las variaciones de la senal de salida debidas al control en adelantoentre las causadas por la accion del controlador gpcc. Por lo que la estimacionpuede calcular valores erroneos.
5.5.1.3. Controlador en adelanto en serie
La figura 5.16 describe el funcionamiento del controlador en adelanto en serie.La salida del controlador gpcc uGPCC representa la correccion de la temperaturadeseada de salida de colectores. La salida del controlador en adelanto uff es elcaudal de agua que debe tener el campo solar para alcanzar el valor deseado dela temperatura de salida.
GPCC Planta Solar u GPCC +
-
Ref
I rr
T e
T amb
T s Control por adelanto
u FF
Figura 5.16: Controlador en adelanto en serie
Si el controlador en adelanto fuera perfecto la salida del gpcc coincidirıa conla referencia dada. Pero si el controlador por adelanto comete errores, el gpcc

Capıtulo 5. Controlador predictivo adaptativo con identificacion simultanea 149
actua de manera que corrige los errores que pudiera haber en el controlador poradelanto.
En este caso, en la estimacion de los parametros del modelo las variables queentran en juego tienen las mismas dimensiones y por lo tanto la ganancia delmodelo sera uno.
Como se ha mencionado anteriormente, para el control de la temperatura desalida de colectores se ha utilizado la estructura del controlador por adelanto enserie.
5.6. Resultados experimentales
Se han realizado diferentes aplicaciones del controlador gpcc sobre la plantasolar. En esta seccion se muestra uno de ellos.
Los valores de los parametros de sintonizacion son los siguientes: Nu = 10, N =60, N3 = 150, λ = 1, δ = 10, γ = 100. Todas las variables de decision del algoritmode optimizacion tienen valor inicial nulo. Es decir, no se tiene conocimiento a prioride la dinamica de la planta. Las cotas maximas y mınimas de las restriccionesson 100 y −100 para los parametros del modelo y 20 y −20 para ∆u maxima ymınima respectivamente.
En la grafica 5.17 se muestran la variable controlada (temperatura de salidade colectores) junto a la referencia, la salidas del controlador gpcc (uGPCC) y lasalida del controlador en adelanto (uFF ) que se corresponde con la variable ma-nipulable B1var. Tambien se representan las perturbaciones medibles (radiacionsolar, temperatura de entrada al campo de colectores y temperatura ambiente) ypor ultimo los parametros estimados a, b y d.
El experimento tiene una duracion de mas de cuatro horas y media, como sepuede observar en la figura, a pesar de los cambios bruscos en la radiacion solary en las variaciones en la temperatura de entrada a colectores, el controlador escapaz de seguir a la referencia y compensar las perturbaciones.
En la grafica tambien se muestran los parametros estimados, siendo la ganan-cia del modelo identificado, aproximadamente la unidad, lo que permite demostrarla bondad de la estimacion.

150 5.6. Resultados experimentales
4000 5000 6000 7000 8000 9000 10000 11000
40
60
Tsc
(ºC
)
4000 5000 6000 7000 8000 9000 10000 1100015
55
110
4000 5000 6000 7000 8000 9000 10000 1100020
30
40
50
4000 5000 6000 7000 8000 9000 10000 11000250
700
1100
Tm =40 seg
Irra
dian
cia
(W/m
2 )
uGPCuFF
TecTamb
1 1.2 1.4 1.6 1.8 2 2.2 2.4
x 104
3
4
5
6
para
met
ro d
1 1.2 1.4 1.6 1.8 2 2.2 2.4
x 104
0
0.3
0.6
para
met
ro b
1 1.2 1.4 1.6 1.8 2 2.2 2.4
x 104
−1
−0.8
−0.6
para
met
ro a
Figura 5.17: Aplicacion I del controlador gpcc a la planta solar
Los resultados obtenidos son muy aceptables, a pesar de la condiciones deoperacion variables lo que quiere decir que el controlador propuesto (gpcc) esun buen candidato para controlar este tipo de plantas.

Capıtulo 5. Controlador predictivo adaptativo con identificacion simultanea 151
5.7. Conclusion
En esta seccion se han desarrollado una nueva alternativa de control pre-dictivo adaptativo: gpcc donde se incluye un modulo de identificacion: vii. Sehan llevado a cabo diferentes simulaciones y comparaciones otros controladores,concretamente con el gpc-vii y el gpc autoajustable.
El controlador gpcc integra en una misma funcion de coste, el seguimiento dela referencia y la estimacion de los parametros del modelo, adquiriendo las pro-piedades de un control dual. Y por ultimo se ha mostrado diferentes aplicacionesdel controlador gpcc a la planta solar, las cuales ponen de manifiesto el buencomportamiento del controlador para controlar la temperatura de salida de co-lectores, a pesar de los cambios en la dinamica del proceso debidos a la radiacionsolar y a la temperatura del agua de entrada al campo solar.

152 5.7. Conclusion

Capıtulo 6
Controlador PredictivoGeneralizado basado en elPredictor de Smith
El controlador Predictivo Generalizado basado en el Predictor de Smith seutiliza para controlar la temperatura del generador de la maquina de absorcionteniendo en cuenta perturbaciones medibles, incertidumbres en el retardo y res-tricciones en la entrada y salida del proceso.
6.1. Descripcion SPGPC
El controlador Predictivo Generalizado basado en el Predictor de Smith (sgpc1)(Normey & Camacho 1999) consiste en aplicar una secuencia de control que mi-nimiza la funcion de coste multiobjetivo siguiente:
J =N2∑
j=N1
δ(j)[y(t + j | t)− w(t + j)]2 +N2−d∑
j=1
λ(j)[u(t + j − 1)]2 (6.1)
Donde N1 y N2 corresponden al horizonte de prediccion mınimo y maximo res-pectivamente, d es el retraso del modelo del proceso entrada-salida, δ(j) y λ(j)son las secuencias de peso, w(t + j) es la futura referencia, u(t) es la accion decontrol incremental (u(t) = u(t) − u(t − 1)) y y(t + j | t) es la prediccion t+j
1Smith Predictor Generalized Predictive Controller
153

154 6.1. Descripcion SPGPC
de la salida del proceso en el instante t. Los horizontes N1 y N2 toman el valorN1 = d+1 y N2 = N +d. Donde N se usa como parametro de sintonizacion paradefinir los horizontes.Ası, J se minimiza considerando las restricciones de entrada y salida. En estecaso se obtienen de la siguiente manera:
umin ≤ u(t) ≤ umax ∀t
dumin ≤ u(t)− u(t− 1) ≤ dumax ∀t
ymin ≤ y(t) ≤ ymax ∀t
La diferencia fundamental entre los algoritmos gpc y spgpc radica en elcalculo de la prediccion de salida. La obtencion de la prediccion de la salida dela planta, en el controlador spgpc, se divide en dos pasos, en cada uno de ellosla prediccion se calcula de forma diferente, como se explica a continuacion:
Paso 1 : desde t + 1 hasta t + d:
En primer lugar se calcula la prediccion de la salida del sistema usandoel modelo en bucle abierto obteniendose mediante la ecuacion:
A(q−1)y(t) = B(q−1)q−du(t− 1)
+ Bp1(q−1)q−d1p1(t− 1) + Bp2
(q−1)q−d2p2(t− 1)(6.2)
En segundo lugar, para cada prediccion en bucle abierto se filtra elerror entre la salida real de la planta y la predicha, de la forma si-guiente:
e(t) = y(t)− y(t) (6.3)
Donde y(t) es la salida real de la planta, y(t) representa la salidapredicha del sistema en bucle abierto y e(t) la diferencia entre lasanteriores variables.
El error e(t) se filtra mediante un filtro paso baja F (q−1) definido dela siguiente manera:
F (z) = [(1− β)z
z − β
z − βγ
1− βγ]m (6.4)
El filtro forma parte de los parametros de sintonizacion, como severa mas adelante, se elige teniendo en cuenta un compromiso entre lacompensacion de perturbaciones y una respuesta robusta del sistema.(Normey & Camacho 1999).
ef (t) = F (q−1)e(t) (6.5)

Capıtulo 6. Controlador Predictivo Generalizado basado en el Predictor de Smith 155
Y por ultimo las salidas predichas desde desde t + 1 hastat + d secorrigen mediante el error filtrado ef (t):
y(t + d− i | t)← y(t + d− i | t) + ef (t− i) ∀i = 0 . . . d− 1 (6.6)
Paso 2 : desde t + d + 1 hasta t + d + N
La prediccion de la salida de la planta se calcula usando un modeloincremental del proceso (Camacho & Bordons 2004), como se calcularıala prediccion en un controlador gpc:
(1− q−1)A(q−1)y(t) = q−dB(q−1)∆u(t− 1) + q−d1Bp1(q−1)∆p1(t− 1)
+ q−d2Bp2(q−1)∆p2(t− 1) (6.7)
Para la sintonizacion del spgpc se sigue el siguiente procedimiento:
Eleccion de los parametros del controlador: N , δ y λ para obtener el segui-miento de la referencia de la planta nominal
Estimar la incertidumbre de la planta y definir el filtro F (q−1) para mejorarla robustez del sistema en la region de frecuencia deseada.
Este procedimiento se puede usar cuando se conocen las incertidumbres dela planta y el conjunto de especificaciones del controlador no tiene en cuenta lasrestricciones. En este caso la sintonizacion del filtro se debe llevar a cabo paraobtener un compromiso entre la robustez y la compensacion de perturbaciones(Normey & Camacho 1999). Destacar que el incremento de las caracterısticas delfiltro paso baja mejora la robustez y deteriora la respuesta a las perturbaciones enbucle cerrado. Para mantener las condiciones de operacion en regimen permanenteel filtro F (1) es igual a la unidad.
En la practica, cuando la informacion acerca de las incertidumbres es pobrey/o se tienen en cuenta las restricciones, la sintonizacion del filtro debe llevarse acabo mediante reglas intuitivas. La caracterıstica mas importante del spgpc eneste caso es que el incremento de las caracterısticas del filtro paso baja siempreobtendra una respuesta lenta y aumentara las robustez. Ademas es importantedestacar que el controlador spgpc el filtro solo afecta al calculo de la respuestalibre del algoritmo y el procedimiento de optimizacion serıa el mismo que el deun controlador gpc.
Un analisis mas detallado del procedimiento de sintonizacion del spgpc sedescribe en la siguiente seccion.

156 6.2. Sintonizacion del SPGPC
6.2. Sintonizacion del SPGPC
La sintonizacion del spgpc depende de los horizontes, de los factores de pesoy del filtro de la prediccion. La funcion de transferencia nominal entre u e y sepuede escribir de la siguiente manera:
Pn(z) = Gn(z)z−d
Donde d es el retardo del sistema y Gn es el modelo de la planta sin retardo.
Los horizontes se eligen: N1 = d + 1 y N2 = d + N . para reducir el numerode parametros Nu se puede fijar como Nu = N . Esta eleccion no afecta a lasconclusiones del siguiente analisis. Normalmente la ventana definida mediante Nse usa para capturar el comportamiento transitorio de la planta (N entre 10 y 40podrıa ser un buen valor si el tiempo de muestreo se elige correctamente) En lapractica, la sintonizacion final del controlador se realiza utilizando los parametrosλ y F . La condicion de estabilidad robusta1 en el dominio de la frecuencia ∀ω ∈[0, π/T ] se obtiene mediante (Normey & Camacho 1999):
δP (ω) < Ir(ω) =| 1 + C(ejω)Gn(ejω) |
| C(ejω)Gn(ejω)F (ejω) |(6.8)
Donde C es el controlador primario equivalente del spgpc, como se muestraen la figura 6.1 y δP (ω) representa el error del modelo.
Como se muestra en (Normey & Camacho 1999), C solo depende de Gn yλ. Ademas usando un valor fijo de λ la robustez se puede definir mediante lasintonizacion del filtro F . En esta tesis se lleva a cabo un analisis cualitativo delefecto de λ y F sobre el ındice de robustez Ir(ω). Para ello se calcula Ir(ω) paradistintos valores de λ y F = 1 (ver figura 6.2) ası como para λ = 1 y diferentes
valores del filtro con la forma F = (1−β)zz−β
(ver figura 6.3).
La figura 6.4 muestra los valores de δP para diferentes valores del retardonominal d, con ganancia normalizada y un error en la estimacion del retardo del20 %.
1Notar que esta condicion solo se puede aplicar a sistemas lineales y no garantiza robustez.Sin embargo el analisis es valido localmente cuando las restricciones no se encuentran activaspara el punto de equilibro

Capıtulo 6. Controlador Predictivo Generalizado basado en el Predictor de Smith 157
+
+
+ +
-
-
) | ( ˆ t d t y +
) ( ˆ t y
) ( t y ) ( t u
) ( t p
) ( t w ) ( z W ) ( z C PROCESO
) ( z G n d z -
) ( z F
Figura 6.1: Estructura del controlador spgpc.
10−2
10−1
100
101
10−1
100
101
Frecuencia normalizada
Índi
ce d
e ro
bust
ez s
in fi
ltro
λ=0.2
λ=1
λ=5
λ=10
Figura 6.2: Ir para diferentes valores de λ
Como se puede observar en las figuras el rango importante de las frecuen-cias normalizadas para el analisis de estabilidad robusta esta entre 0,1 y 1 dela frecuencia normalizada. Una conclusion importantes del analisis es que solo el

158 6.2. Sintonizacion del SPGPC
10−2
10−1
100
101
10−1
100
101
Índi
ce d
e ro
bust
ez c
on fi
ltro
Frecuencia normalizada
β=0.75
β=0.85
λ=1 siempre
sin filtro
Figura 6.3: Ir para diferentes valores de β.
filtro F permite un incremento considerable de Ir en la misma region. Destacaral aumentar λ solo se obtiene grandes valores de Ir en las altas frecuencias.
Este analisis demuestra que para procesos con retardo, es muy aconsejableutilizar el filtro F , en lugar de λ, como parametro de sintonizacion robusto queno afecta al seguimiento de la referencia del controlador.
El filtro paso baja F se puede definir como:
F (z) = [(1− β)z
z − β
z − βγ
1− βγ]m (6.9)
Donde el cero se introduce para limitar la atenuacion del filtro en alta frecuen-cia y β and m se pueden elegir atendiendo a la forma deseada de la caracterısticapaso baja de F .
En la figura 6.5 F se ha sintonizado para intersectar δP en dos ejemplos condiferentes tiempos muerto usando γ = 0,6. Como era de esperar, en el caso deprocesos con gran retardo es necesario utilizar valores altos de m. Este no es elcaso de la planta solar, donde un filtro de primer orden es suficiente para obtenerun controlador robusto.

Capıtulo 6. Controlador Predictivo Generalizado basado en el Predictor de Smith 159
10−2
10−1
100
101
10−3
10−2
10−1
100
101
d=10
d=5
d=2
Frecuencia normalizada
Err
or d
e m
odel
ado
mul
tiplic
ativ
o
Figura 6.4: Error de modelado δP
6.3. Aplicacion. Control de la temperatura del
generador.
En esta seccion se demuestra, con aplicaciones reales, que el analisis cualitativosobre la sintonizacion del spgpc detallado anteriormente es perfectamente validopara llevarlo a cabo en la practica (Nunez-Reyes et al. 2005). Para ello se hanrealizado diferentes experimentos sobre la planta solar de frıo.
Las dos fuentes de energıa de la instalacion solar de frıo son las siguientes:(i) la energıa solar obtenida mediante el campo de colectores solares y (ii) elsistema de energıa auxiliar. Ambos susbsistemas son los mas importantes a la horadel control global de la planta (Nunez-Reyes, Scheffer-Dutra & Bordons 2002b),(Nunez-Reyes & Bordons 2005), (Nunez-Reyes et al. 2005). El control del primerose detalla en el capıtulo 6 y el control del segundo se detalla a continuacion. Porlo tanto en este caso el problema de control se direcciona a la regulacion dela temperatura del agua de entrada del generador Tege. Ya se ha mencionadoanteriormente que la maquina de absorcion impone unos lımites de temperatura(entre 75C and 95C) por condiciones de operacion. Dichas restricciones se debentener en cuenta a la hora del control de la Tege.

160 6.3. Aplicacion. Control de la temperatura del generador.
10−2
10−1
100
101
10−3
10−2
10−1
100
101
102
Frecuencia normalizada
Índi
ce d
e ro
bust
ez y
err
or d
e m
odel
ado
d=10
d=2
β=0.83, m=3
β=0.81, m=1
Figura 6.5: Sintonizacion de Ir para diferentes valores de δP .
El control de la Tege tambien se ha realizado mediante un controlador pid queha mostrado un mal funcionamiento debido a la incapacidad de compensar lasperturbaciones en la Tege producidas: (i) por las oscilaciones de la temperatura dela caldera de gas natural. Dichas oscilaciones son generadas por el controlador detemperatura interno (de seguridad) on−off de la caldera (ii) y por las variacionesen la temperatura del agua procedente, o bien del campo solar, o bien de losacumuladores (en este caso se ha configurado la planta para que el agua quealimenta la maquina de absorcion sea una mezcla del agua procedente de calderay de tanques). Ademas, el pid no permite compensar el retardo del proceso niconsiderar restricciones en el diseno, las cuales deben ser incluidas para garantizarel correcto funcionamiento de la maquina de absorcion.
Las dos perturbaciones medibles (Tac y Tcal) tienen una gran influencia sobreel comportamiento final del controlador porque estan relacionadas con la canti-dad de energıa almacenada en el sistema. Diferentes experimentos se han llevadoa cabo para el control de la temperatura del generador sin considerar perturba-ciones medibles en las ecuaciones de prediccion dando inaceptables resultados enel control final. Uno de estos experimentos se muestra en la figura 6.6 donde sepueden ver las oscilaciones causadas por las perturbaciones. En dicha figura semuestran la Tege junto a su referencia, el valor de la variable manipulable V M3y por ultimo las dos perturbaciones medibles Tac y Tcal.

Capıtulo 6. Controlador Predictivo Generalizado basado en el Predictor de Smith 161
11000 11500 12000 12500 13000 135000
50
100
11000 11500 12000 12500 13000 1350077
77.5
78
78.5
11000 11500 12000 12500 13000 1350079
90
105
11000 11500 12000 12500 13000 13500
80
85
90
Teg
e (º
C)
VM
3 (%
)T
ac (
ºC)
Tca
l (ºC
)
Tiempo muestreado
Figura 6.6: spgpc sin considerar perturbaciones medibles.
Teniendo en cuenta el conjunto de especificaciones de control para la operacionde la planta, la utilizacion de un controlador predictivo parece ser la estrategiamas apropiada para el control de Tege. El controlador spgpc es especialmenteapropiado para el control de procesos con tiempo muerto en presencia de incerti-dumbres del modelo y perturbaciones (Normey & Camacho 1999). La estrategiaaplicada incluye perturbaciones medibles, restricciones en amplitud y velocidadde la variable manipulable y restricciones en la amplitud de la variable controlada.
6.3.1. Identificacion del modelo
El proceso real tiene un comportamiento no lineal, pero como en cualquierproceso industrial, las variables, manipulada y controlada se mantienen cercadel punto de operacion deseado. Ası para el procedimiento de identificacion delmodelo, se supone un modelo lineal considerando pequenos cambios alrededor delpunto de operacion. dicho modelo lineal se utiliza para obtener las prediccionesen el algoritmo de control.
Para la identificacion del modelo se han considerado tres entradas y una salidadescritas en la ecuacion 6.10. La variable controlada y se corresponde con la

162 6.3. Aplicacion. Control de la temperatura del generador.
temperatura del generador. La variable manipulable u representa a la aperturade la valvula de tres vıas vm3. Las perturbaciones medibles p1 y p2 definen ala temperatura de acumuladores y la temperatura de caldera respectivamente.Mientras que A, B, Bp1
y Bp2son polinomios en el operador de desplazamiento
q−1.
A(q−1)y(t) = B(q−1)q−du(t− 1)
+ Bp1(q−1)q−d1p1(t− 1) + Bp2
(q−1)q−d2p2(t− 1) (6.10)
Para la realizacion de la identificacion se han excitado las variables u, p1 y p2 condiferentes escalones usando un tiempo de muestreo de 4 segundos. Los coeficientesse han estimado utilizando el algoritmo de mınimos cuadrados recursivo para unmodelo armax descrito en la ecuacion 6.10. La figura 6.7 muestra la entradas yla salida reales que se han utilizado para el proceso de identificacion (vm3, Tac,Tcal y Tge). Los polinomios obtenidos son los siguientes:
B(q−1) = (−0,0665q−1 + 0,0959q−2 − 0,0328q−3)q−1
Bp1(q−1) = (−0,0227q−1 + 0,0298q−2)q−2
Bp2(q−1) = 0,1940q−1 − 0,2575q−2 + 0,0686q−3
A(q−1) = 1− 1,7055q−1 + 0,9625q−2 − 0,3638q−3 + 0,1243q−4
y los retrasos d = 1, d1 = 2 y d2 = 0. La figura 6.7 muestra la variable de procesoreal y la salida simulada. Se puede observar que el modelo capta la dinamica masimportante de la salida real. El modelo obtenido se considera bastante aceptable apesar de su simplicidad. Con un modelo de mayor orden se podrıa conseguir mejo-res resultados pero a costa de obtener mayor complejidad. Para mas informacionacerca de la identificacion de la planta se puede consultar (Delgado 2000).
6.3.2. Experimentos reales
Se han realizado diferentes experimentos para mostrar el comportamiento delcontrolador y el efecto del filtro en bucle cerrado.
This section presents the obtained experimental results. As has been pre-viously mentioned, the manipulated variable of the spgpc is valve vm3 opening.However the algorithm uses three measured temperatures to compute the controlaction. One is the temperature of the absorption machine that must be maintai-ned near the desired reference. The others signals are the output temperaturesof the accumulators and the gas heater, used as measurable disturbances. Theoptimization control algorithms also consider the input and output constraints.

Capıtulo 6. Controlador Predictivo Generalizado basado en el Predictor de Smith 163
3000 4000 5000 6000 7000 8000 9000 10000 11000 1200070
80
90
100
Samples time
Tgh
(ºC
)
3000 4000 5000 6000 7000 8000 9000 10000 11000 1200070
72
74
76
Tac
(ºC
)
3000 4000 5000 6000 7000 8000 9000 10000 11000 120000
50
100
VM
3 (%
)
3000 4000 5000 6000 7000 8000 9000 10000 11000 120000
50
100
sim
.&re
al T
eg
Figura 6.7: Temperatura del generador. Senal real y modelada
Se han realizado diferentes experimentos de aproximadamente 4 horas paramostrar el comportamiento del controlador y el efecto del filtro de robustez enbucle cerrado. El filtro de robustez utilizado es de orden uno porque el tiempomuerto del modelo nominal no es dominante:
F (z) =(1− β)z
z − β
z − βγ
1− βγ(6.11)
Los parametros β y γhan sido modificados durante el experimento. Los hori-zontes y los factores de peso se han elegido utilizando la respuesta nominal (comose explica en la subseccion 2 del presente capıtulo):N = Nu = 30 y λ = 0,05.Antes de lleva a cabo los experimentos, se han realizado diferentes chequeos parala obtencion de un buen comportamiento del sistema en bucle cerrado utilizandosolo λ y N como parametros de sintonizacion. Las respuestas en bucle cerradoresultaron ser muy oscilatorias sin el uso del filtro.
Las graficas siguientes muestran, el comportamiento de la salida controlada(Tege) junto a su referencia, la accion de control (V M3), la temperatura de los

164 6.3. Aplicacion. Control de la temperatura del generador.
acumuladores (Tac) y por ultimo la temperatura del agua de la caldera de gas(Tcal).
En el primer caso, como se muestra en la figura 6.8, el valor de la referenciaes 80C y no se cambia a lo largo del experimento, el objetivo aquı es mostrar lasintonizacion de β
4200 4400 4600 4800 5000 5200 5400 560070
80
90
Teg
e (°
C)
4200 4400 4600 4800 5000 5200 5400 56000
50
100
VM
3 (%
)
4200 4400 4600 4800 5000 5200 5400 560067
68
69
70
Tac
(°C
)
4200 4400 4600 4800 5000 5200 5400 560080
85
90
Tiempo muestreado
Tca
l (°C
)
Resultados experimentales I
Figura 6.8: Experimento I
Para demostrar que incrementando el valor de β se hace el controlador masrobusto, entre los instantes de tiempo 4200-4500, el filtro se ha sintonizado convalores bajos de β (0,7) y γ (0,01) (con esta eleccion el cero del filtro no tienedemasiado efecto sobre el comportamiento). Destacar que durante este periodo detiempo la variable controlada muestra un comportamiento oscilatorio alrededor dela referencia, a causa, principalmente, de la perturbacion Tcal, dicha perturbacionno se puede considerar de una manera desacoplada porque esta se encuentrainfluenciada por la variable manipulable V M3. Para atenuar las oscilaciones lascaracterısticas del filtro paso baja se incrementan usando β = 0,9. Se puedeobservar que, aproximadamente, en el instante de tiempo 4500 el controladorconduce a Tege hacia la referencia y elimina las oscilaciones de ambas variables(Tege y Tcal).
La primera parte del segundo experimento, (ver figura 6.9) se inicia con un

Capıtulo 6. Controlador Predictivo Generalizado basado en el Predictor de Smith 165
valor de β (0,8). Como Tege presenta oscilaciones indeseables, se aumenta el valorde β hasta 0,9 en el instante de tiempo 7200. Se puede observar que, con estaaccion, las oscilaciones se atenuan. Mas tarde Tege alcanza la referencia deseada ycon la sintonizacion previa del filtro se introduce un cambio en la referencia (desde83 a 80C) con objeto de mostrar la capacidad del controlador en el seguimientode la referencia.
7000 7200 7400 7600 7800 8000 8200 8400 8600 880075
80
85
7000 7200 7400 7600 7800 8000 8200 8400 8600 88000
50
100
7000 7200 7400 7600 7800 8000 8200 8400 8600 880070
71
72
73
7000 7200 7400 7600 7800 8000 8200 8400 8600 880086
88
90
92
Resultados experimentales II
Teg
e (°
C)
VM
3 (%
)T
ac (
°C)
Tca
l (°C
)
Tiempo muestreado
Figura 6.9: Experimento II
El ultimo de los experimentos se muestra en la figura 6.10 y tiene como objetivodemostrar el efecto del cero del filtro sobre el comportamiento del control en buclecerrado. Inicialmente, los parametros del filtro son: β = 0,9 y γ = 0,01. En elinstante de tiempo 5770 se cambia el valor de γ a 0,5. Como el filtro pierde suefecto en las frecuencias medias el controlador no puede mantener la estabilidad.Ası en la muestra 6000 se vuelve a modificar el valor de γ a 0,01 y de nuevo latemperatura alcanza la referencia deseada.
6.4. Conclusion
Con este trabajo se muestra que (i) para sistemas con tiempo muerto, elfiltro usado en el controlador spgpc, es el mas apropiado para incrementar la

166 6.4. Conclusion
5600 5700 5800 5900 6000 6100 6200 630070
80
90
5600 5700 5800 5900 6000 6100 6200 63000
50
100
5600 5700 5800 5900 6000 6100 6200 630066
70
74
5600 5700 5800 5900 6000 6100 6200 630075
88
Resultados experimentales III
Teg
e (°
C)
VM
3 (%
)T
ac (
°C)
Tca
l (°C
)
Tiempo muestreado
Figura 6.10: Experimento III
robustez especialmente cuando se consideran incertidumbres en el retraso. (ii) Lasintonizacion del filtro del controlador se basa en reglas faciles e intuitivas quepermiten obtener un buen compromiso entre comportamiento y robustez. (iii)En la aplicacion particular sobre la planta de aire acondicionado solar, el contro-lador propuesto alcanza un buen comportamiento en cuanto al seguimiento dela referencia y la compensacion de perturbaciones. El controlador SPGPC es laestrategia de control mas apropiada para usar en procesos donde es necesario con-siderar simultaneamente perturbaciones medibles, restricciones e incertidumbresen el retardo a la hora de calcular la accion de control.

Capıtulo 7
Resultados del control global dela planta de refrigeracion solar
En este capıtulo se realiza el control global de la planta real aplicando laestrategia de control propuesta en la tesis. Se destaca el comportamiento de loscontroladores avanzados en los diferentes modos de funcionamiento y se demuestrael cumplimiento de los objetivos de control definidos con anterioridad.
7.1. Introduccion
El control de la planta se realiza mediante diferentes niveles de control queengloban multiples objetivos, prioridades y restricciones. Se trata de un controlcomplejo que requiere la aplicacion de controladores avanzados para obtener elcumplimiento de los objetivos. El objetivo mas importante consiste en satisfacerla demanda de frıo requerida por la sala.
Por una parte, el algoritmo de seleccion de modos de funcionamiento (vercapıtulo 4) selecciona la configuracion de la planta segun las condiciones de ope-racion para conseguir: maximizar el uso de energıa solar, maximizar el almacenajede agua caliente en los tanques y minimizar el consumo de gas natural. La se-leccion del modo de funcionamiento tiene como consecuencia la activacion de laestrategia de control disenada en el modo elegido.
Por otra parte, el algoritmo de optimizacion del rendimiento del sistema (vercapıtulo 3), calcula el punto de operacion de la planta ( SP Tege, SP Tsc y
167

168 7.2. Resultados obtenidos
SP Qge) para responder a la demanda frigorıfica y maximizar el rendimientodel sistema.
Como ya sabemos, la temperatura de salida del evaporador debe estar com-prendida entre 9 y 10C. Dichos valores determinan el rango en el que debeencontrarse la potencia frigorıfica instantanea en cada momento. Si la carga de lasala fuera constante, la franja de los valores permitidos de la potencia frigorıficatambien serıan constantes. Pero como esto no es ası puesto que la temperatura deentrada al evaporador varıa a lo largo del dıa, segun la carga termica de la sala,se debe calcular el tramo de valores deseados en los que se puede encontrar lapotencia frigorıfica de la maquina de absorcion., con objeto de que la temperaturade salida del evaporador se encuentre entre 9 y 10C a pesar de que haya cambiosen la radiacion solar y/o cambios en la carga termica de la sala.
Recordemos que el horario en que las necesidades de confort de los usuariosrequieren refrigeracion se extiende desde las 11:00 de la manana a las 17:30 de latarde.
7.2. Resultados obtenidos
En las numerosas aplicaciones de la estrategia de control a la planta solarse han recogido considerables resultados. En esta seccion se ha elegido una deellas con objeto de mostrarla con mas detenimiento y detalle. Se presentan losresultados mas relevantes ademas del control en cada uno de los modos de fun-cionamiento. En la seccion siguiente se aglutinan diversos ensayos y se realizaun analisis de todos ellos matizando las caracterısticas mas importantes. El ex-perimento que se describe en este apartado se ha llevado a cabo durante un dıadespejado de principios de octubre. En la grafica 7.1 se representa la radiacionsolar y la temperatura ambiente, solo en el tramo horario que nos incumbe.
La puesta en marcha de la maquina de absorcion tiene una duracion de apro-ximadamente 20 minutos. El tiempo de puesta en marcha se desprecia a la horade realizar los calculos pertinentes como por ejemplo, rendimiento, potencias,tiempo de caldera activa, etc.
Como los modos de funcionamiento dependen de las condiciones meteorologi-cas, del instante del dıa y de la carga termica de la sala, no tienen por que activarsetodos ellos en un mismo experimento. En cada instante se elige el mejor modo deoperacion de la planta pudiendo resultar que algunos de los modos no se activen.

Capıtulo 7. Resultados del control global de la planta de refrigeracion solar 169
11:00 14:00 17:30400
600
800
1000
120014/10/06
Rad
iaci
ón s
olar
(W
/m2 )
11:00 14:00 17:3020
22
24
26
28
30
Horas
Tem
pera
tura
am
bien
te (
ºC)
Figura 7.1: Experimento I. Radiacion solar y temperatura ambiente 14/10/06
En la grafica 7.2 se muestra el tiempo en tanto por ciento de los modos defuncionamiento con los que la planta ha trabajado durante la realizacion delexperimento I. Se puede observar que el tiempo total de los modos 1 y 2 (modosdonde la caldera de gas natural se encuentra activa), es menos del 19 %.
Solo el 21 % del tiempo total, el agua calentada por el campo solar se direc-ciona exclusivamente hacia la maquina de absorcion, mientras que mas del 58 %del tiempo la energıa solar se distribuye entre el equipo se absorcion y los acumu-ladores. Gracias al algoritmo de seleccion de modos de funcionamiento (capıtulo4) disenado, entre otras cosas, para maximizar el almacenaje de agua caliente enlos tanques se consigue que hasta el 3 % del tiempo, la maquina de absorcion tra-baje exclusivamente con el agua almacenada en los tanques, economizando ası elconsumo de gas natural. De la grafica tambien se deduce que a lo largo de todo elexperimento mas del 81 % del tiempo, la maquina de absorcion trabaja mediantela energıa solar sin necesidad de un aporte auxiliar de energıa.
Los modos de funcionamiento 4.1 y 5.1 no han sido necesarios para el presenteexperimento.
El valor obtenido del coeficiente de funcionamiento (cop) en el ensayo ejecu-tado es 0,7890 que supera al valor nominal.

170 7.2. Resultados obtenidos
4%
52%
2%2%
16%
52%
< 1%3%
21%
Modo1 Modo2.1 Modo2.2 Modo3.1 Modo3.2 Modo3.3 Modo4.2 Modo5.2
Figura 7.2: Modos de funcionamiento activos del experimento I
En la tabla 7.1 se muestra el balance de energıa obtenido en el experimento.
kWh energıa energıa energıa energıa energıa energıacolectores caldera evaporador generador condensador solar
14/10/2006 193,0131 22,4732 134,1235 169,9819 285,7875 824,6359
Cuadro 7.1: Balance de energıa
Los errores cometidos en el control de la temperatura de salida de colectoresy de la temperatura del generador, en el experimento I, se han medido medianteel error cuadratico medio (ecm), en la tabla 7.2 se exponen sus valores.
ECMcol ECMge
14/10/2006 0,55 0,18
Cuadro 7.2: Experimento I. Errores cuadraticos medios.
Cabe destacar, el notable aprovechamiento de la energıa solar, durante el ex-perimento I, ası como el tiempo, casi inevitable, del sistema de energıa auxiliaractivo. En cuanto al almacenamiento de energıa en el sistema de acumulacion, seha conseguido aumentar la temperatura del agua almacenada 7C, aproximada-mente. La utilizacion de los modos 5.1 y 5.2 dependen de la temperatura inicialdel agua de los tanques y del incremento que esta adquiere durante el dıa.

Capıtulo 7. Resultados del control global de la planta de refrigeracion solar 171
En la figura 7.3 se representa la potencia frigorıfica instantanea controladajunto a la franja de valores permitidos para que la temperatura de salida delevaporador este entre 9 y 10C.
11:00 14:00 17:30−5
0
5
10
15
20
25
30
3514/10/06
horas
kW
Figura 7.3: Control demanda de frıo 14/10/06
El valor actual de la potencia frigorıfica se encuentra dentro del rango devalores deseados, satisfaciendo ası la demanda de frıo de la sala a pesar de lasvariaciones que existen en la radiacion solar y en la carga termica de la misma(figura 7.1).
En cuanto al cumplimiento de los demas objetivos, hay que decir que es muydifıcil llevar a cabo comparaciones de diferentes aplicaciones del control a la plantareal, puesto que todos los dıas son diferentes en cuanto a las condiciones meteo-rologicas y a la carga termica de la sala. No obstante, se muestran los resultadosde control obtenidos mediante la aplicacion de la estrategia disenada y los con-troladores propuestos.
A continuacion se describe con detalle, el control de la planta en cada uno delos modos de funcionamiento.
Control modo de funcionamiento 1 y 2.1
La planta opera menos del 1 % del tiempo global en el modo 1. Lo mas des-

172 7.2. Resultados obtenidos
tacable, desde el punto de vista del control es el comportamiento del controladorspgpc. Para ello se ha dirigido la atencion a un tramo del experimento donde laplanta se encuentra trabajando en el modo 1 y cambia al modo 2.1 . La grafi-ca 7.4 refleja el comportamiento de algunas variables de interes de la planta enlos modos mencionados. En la primera figura se representan la temperatura delgenerador controlada junto a la referencia optima y una de las perturbacionesmedibles mas influyentes en el control que es la temperatura de caldera. En lasegunda se dibuja la temperatura de salida de los acumuladores, otra de las per-turbaciones medibles. Y por ultimo se puede apreciar la apertura de la valvulaV M3 en tanto por ciento. Se pone de manifiesto el buen comportamiento delcontrolador spgpc en cuanto al seguimiento de la referencia a pesar de las va-riaciones en las perturbaciones. Ademas las restricciones se cumplen tanto en laentrada como en la salida.
11:25 11:37 12:1082
84
86
88
90
Tª
gene
rado
r
y c
alde
ra(º
C)
11:25 11:37 12:1073.2
73.4
73.6
73.8
Tac
(ºC
)
11:25 11:37 12:1015
20
25
30
Experimento I: Control modo de funcionamiento 1 y 2.1 (SPGPC)
VM
3 (%
)
referencia Tege Tscal
Modo 1 Modo 2.1
Figura 7.4: Experimento I. Modo de funcionamiento 1 y 2.1. (spgpc)
Si se calcula el cop instantaneo, se obtienen los valores representados en 7.5donde se puede apreciar que la referencia de la temperatura del generador y elalcance de esta permiten obtener un valor optimo del cop. Incluso al principio deldıa, una vez que la maquina de absorcion consume el tiempo adecuado para supuesta en marcha, la estrategia de control aplicada conduce a la planta a trabajar

Capıtulo 7. Resultados del control global de la planta de refrigeracion solar 173
11:25 11:37 12:100.4
0.5
0.6
0.7
0.8
0.9
horas
CO
P
Modo 1 Modo 2.1
Figura 7.5: Experimento I. Modos de funcionamiento 1 y 2.1
11:25 11:37 12:1060
67
74
80
87
Tsc
y T
ac (
ºC)
11:25 11:37 12:100
500
1000
Qge
(l/)
11:25 11:37 12:1010
20
30
40
horas
B1(
%)
Tsc Tac
Modo 1 Modo 2.1
Figura 7.6: Experimento I. Modos de funcionamiento 1 y 2.1 (gpcc)
en las condiciones de operacion optimas.

174 7.2. Resultados obtenidos
La temperatura de salida de colectores se encuentra controlada mediante elcontrolador gpcc (ver figura 7.6), el valor de su referencia es de 80C. El valordel caudal deseado es de 800 l/h durante todo el tramo. Se observa que aunqueel caudal no varıa, al producirse el cambio de un modo a otro, el variador develocidad de la bomba B1, se modifica para conseguir el mismo caudal. De estaforma se consigue que la temperatura de salida de colectores alcance el valor dela referencia en el mınimo tiempo posible.
Control modo de funcionamiento 3.3
En el modo 3.3, V M3 y B1 se manipulan mediante el controlador de gamapartida para alcanzar el valor deseado del caudal del generador. Existen diferentessoluciones para el problema. Es decir, para distintos valores de B1 y V M3 seobtiene el mismo caudal en el generador. Para optimizar el consumo de energıa seconsidera siempre el mınimo valor posible del variador de velocidad de la bombaB1, (ver capıtulo 4). En la grafica 7.7 se puede observar un intervalo de tiempo,del experimento I, donde la planta se encuentra trabajando en el modo 3.3. Serepresentan el caudal del generador junto a su referencia y los valores de lasvariables manipulables. Ademas se muestra el COP instantaneo de la planta enese momento. Se demuestra ası que mediante cambios en el caudal del generadores posible dar respuesta a la demanda frigorıfica con el optimo rendimiento.
Control modo de funcionamiento 4.2
En la grafica 7.8, se destaca el comportamiento del controlador gpcc traba-jando en el modo 4.2. Se muestran la Tsc junto a su referencia, ademas de losparametros a y b y d estimados. Tambien se representan las salidas de los doscontroladores: del gpcc (uGPCC) y del controlador en adelanto (uFF ). Se pue-de observar, el buen comportamiento del gpcc adaptativo, es capaz de seguir a lareferencia incluso en saltos bruscos de la misma ademas de estimar los parametrosdel sistema.
Control modo de funcionamiento 2.2
En el modo 2.2 toda el agua procedente del campo solar se conduce hacia lostanques. En la figura 7.9, se muestra el control de la planta real en dicho modo.
Aunque la temperatura de caldera tenga oscilaciones mantenidas de hasta10C de amplitud, el controlador spgpc es capaz de lograr un seguimiento de lareferencia bastante aceptable.
La Tsc se regula mediante el controlador gpcc (ver grafica 7.10), su referencia

Capıtulo 7. Resultados del control global de la planta de refrigeracion solar 175
13:37 13:45 14:07
4000
6000
8000C
auda
l gen
erad
or l/
h
13:37 13:45 14:070
50
100
%
13:37 13:45 14:07
0.6
0.8
1
horas
CO
P
FCD10014 VM310003
Figura 7.7: Experimento I. Modo de funcionamiento 3.3. (Controlador de gama par-
tida)
1 1.2 1.4 1.6 1.8 2 2.2 2.4
x 104
81
88.5
Tsc
1 1.2 1.4 1.6 1.8 2 2.2 2.4
x 104
020
50
75
100
1 1.2 1.4 1.6 1.8 2 2.2 2.4
x 104
−0.8
−0.6
a
1 1.2 1.4 1.6 1.8 2 2.2 2.4
x 104
0
0.2
0.4
0.6
b
3
4
5
horas
d
uGPCCuFF
Figura 7.8: Experimento I. Modo de funcionamiento 4.2. (gpcc)

176 7.3. Otros resultados
16:14 16:4275
80
85
90
Tª
gene
rado
r
y c
alde
ra(º
C)
16:14 16:4279
80
81
Tac
(ºC
)
SP Tªgenerador Tªcaldera
16:14 16:420
50
100
Modo 2.2 14/10/06
VM
3(%
)
Figura 7.9: Experimento I. Modo de funcionamiento 2.2 (spgpc)
es de 80C, se puede observar que el valor de la Tsc no alcanza la referencia,esto e debido a la insuficiente radiacion solar de ese momento, por ello el modode funcionamiento que se encuentra activo es el modo 2.2. Tambien se puedeobservar, en la misma grafica, el valor de los parametros estimados, el retardo novarıa siendo su valor de 5 perıodos de muestreo.
Control modo de funcionamiento 3.2 y 5.2
En la grafica 7.11 se puede apreciar un cambio de modos de funcionamiento, alprincipio la planta se encuentra operando en el modo 3.2, y en el momento en quela temperatura de tanques supera los 80C se cambia al modo de funcionamiento5.2, donde la maquina de absorcion trabaja con el agua que procede del sistemade acumulacion, prescindiendo ası de la caldera de gas.
7.3. Otros resultados
La planta solar de produccion de frıo has sido controlada durante diversos dıas,mediante la estrategia de control propuesta en la tesis. En la seccion anterior seha descrito un experimento completo, en esta parte se lleva a cabo un resumende los resultados obtenidos en los diferentes ensayos ejecutados.

Capıtulo 7. Resultados del control global de la planta de refrigeracion solar 177
16:14 16:42
78
80
82
Tsc
16:14 16:42−1
−0.9
−0.8
pará
met
ro a
16:14 16:420
0.1
0.2
horas
pará
met
ro b
Figura 7.10: Experimento I. Modo de funcionamiento 2.2. (gpcc)
17:04 17:3020
40
60
80
100
Horas
VM
3 y
B1
(%)
17:04 17:302000
4000
6000
8000
10000
Cau
dal (
l/h)
VM3B1var
Modo 3.2 Modo 5.2
Figura 7.11: Experimento I. Modos de funcionamiento 3.2 y 5.2
En la tabla 7.3 se presenta el balance de energıa de los diferentes dıas, dondese muestran la energıa (kWh) de los subsistemas mas importantes (colectores,

178 7.3. Otros resultados
caldera, evaporador, generador, condensador y campo solar).
energıa energıa energıa energıa energıa energıacolectores caldera evaporador generador condensador solar
02/10/2006 200,2034 27,8375 137,2400 169,4185 300,1179 821,8050
03/10/2006 194,8830 59,7223 137,5516 189,3346 307,7025 837,7544
09/10/2006 136,0881 58,7927 118,9606 173,8980 264,9746 727,6977
10/10/2006 42,1360 141,7747 125,1120 163,8894 289,8023 588,5952
11/10/2006 148,2077 68,8561 103,3976 180,0220 271,6453 786,3882
12/10/2006 143,0756 86,1729 110,1435 159,0800 250,3135 812,4264
13/10/2006 169,9296 50,4904 111,0064 175,4663 269,0697 785,2486
14/10/2006 193,0131 22,4732 134,1235 169,9819 285,7875 824,6359
Cuadro 7.3: Balance energetico (kWh)
Cabe destacar que en todos los experimentos, la energıa de la caldera es supe-rior a la energıa del campo solar, lo que supone que en la mayor parte del tiempola maquina de absorcion produce frıo gracias al campo solar y el consiguienteahorro energetico. Solo en el ensayo correspondiente del dıa 10, la energıa de cal-dera supera a la de los colectores, esta excepcion es debida a que en dicho dıaexistıa una abundante nubosidad (ver grafica 7.12) que provocaba el descenso dela temperatura de salida de colectores haciendo indispensable el aporte de energıaauxiliar.
Tambien cabe destacar que en la baterıa de ensayos existen otros dıas nubososcomo el dıa 11 (ver grafica 7.13), pero que a pesar de eso, la energıa de del camposolar supera a la energıa producida por la caldera.
En la tabla 7.4 se muestran el coeficiente de comportamiento de la maquina deabsorcion, junto a la eficiencia de colectores y el coeficiente de comportamientosolar, resultantes del control de la planta. Donde se puede observar que en lamayorıa de los casos el COP obtenido supera al valor nominal de la maquina deabsorcion.
Los errores cometidos en el control de la temperatura de salida de colectoresy de la temperatura del generador se miden mediante el error cuadratico mediomostrado en la tabla 7.5.
Con el objetivo de mostrar el ahorro de energıa que se obtiene maximizando elCOP de la maquina de absorcion, se ha calculado la energıa necesaria que habrıaque suministrar a la maquina de absorcion para obtener la misma energıa en elevaporador con un valor medio de COP (4,5). Puesto que en todos los ensayosrealizados el valor de COP supera al valor medio, la energıa obtenida, en todos

Capıtulo 7. Resultados del control global de la planta de refrigeracion solar 179
11:00 17:300
300
600
900
1200
1500
Rad
iaci
ón s
olar
(W
/m2 )
11:00 17:3022
24
26
28
Tem
pera
tura
am
bien
te (
ºC)
10/10/06
Figura 7.12: Radiacion solar y temperatura ambiente. Dıa 10/10/06
11:00 17:300
300
600
900
1200
1500
Rad
iaci
ón s
olar
(W
/m2 )
11:00 17:3020
22
24
26
28
30
Tem
pera
tura
am
bien
te (
ºC)
11/10/06
Figura 7.13: Radiacion solar y temperatura ambiente. Dıa 11/10/06
los casos, supera a la energıa del generador en los experimentos realizados. Losvalores obtenidos se muestran en la tabla 7.6 y en el diagrama de bloques 7.14

180 7.3. Otros resultados
COP η COPsolar
02/10/2006 0,8101 0,2436 0,197303/10/2006 0,7265 0,2326 0,169009/10/2006 0,6841 0,1870 0,127910/10/2006 0,7634 0,0716 0,054611/10/2006 0,5744 0,1885 0,108212/10/2006 0,6924 0,1761 0,121913/10/2006 0,6408 0,2137 0,136914/10/2006 0,7890 0,2341 0,1847
Cuadro 7.4: Coeficiente de comportamiento de la maquina de absorcion, eficiencia de
colectores y coeficiente de comportamiento solar
ECMcol ECMge
02/10/2006 0,39 0,5403/10/2006 0,48 0,1309/10/2006 0,11 0,0510/10/2006 1,21 0,6711/10/2006 0,76 0,1712/10/2006 0,43 0,2613/10/2006 0,73 0,4014/10/2006 0,55 0,18
Cuadro 7.5: Error cuadratico medio de los controladores gpcc y spgpc
donde se muestran en color rojo la energıa necesaria para la produccion de lapotencia frigorıfica deseada con el COP optimo, y en color azul la energıa quese deberıa haber suministrado a la maquina de absorcion para obtener la mismapotencia frigorıfica con un valor medio de COP .
Por ultimo se presenta un estudio de costes de operacion del sistema de refri-geracion solar (SRS) que se compara con los costes de operacion de un sistemade refrigeracion convencional (SRC).
El consumo electrico de la planta de refrigeracion solar proviene de tres bombas(B1, B4 y B6) que tienen una potencia de 0,74 kW . El coste electrico de las tresbombas durante un dıa de ensayo serıa de 1,2204 euros. Pero cabe destacar quela bomba B1 a diferencia de las demas no trabaja siempre a pleno rendimiento,ya que su velocidad es regulable e incluso a veces, dependiendo del modo defuncionamiento puede llegar a pararse. Tambien es necesario recordar que en losmodos de funcionamiento, donde se aplica el controlador de gama partida, se

Capıtulo 7. Resultados del control global de la planta de refrigeracion solar 181
energıa energıa energıa generadorevaporador generador con valor medio de COP
02/10/2006 137,2400 169,4185 304,977703/10/2006 137,5516 189,3346 305,670209/10/2006 118,9606 173,8980 264,356810/10/2006 125,1120 163,8894 278,026611/10/2006 103,39766 180,0220 229,772412/10/2006 110,1435 159,0800 244,763313/10/2006 111,006 175,4663 249,850314/10/2006 134,123 169,9819 298,0523
Cuadro 7.6: Energıa del generador con el valor optimo de COP frente energıa gene-
rador con un valor medio de COP
0 1 2 3 4 5 6 7 8 90
50
100
150
200
250
300
350
ensayos
Ene
rgía
térm
ica
(kW
h)
Energ. COP óptimoEnerg. Valor medio COP
Figura 7.14: Comparativa de energıa termica
minimiza la velocidad de la bomba, contribuyendo de esta manera al ahorro decostes.
Ademas del coste electrico hay que anadir el consumo de gas natural, en latabla 7.7 se desglosan ambos valores.
Con el objeto de comparar el coste derivado de la planta de refrigeracion solarcon respecto al supuesto consumo electrico producido por un sistema de refrigera-cion convencional (SRC) se ha calculado la energıa necesaria, del segundo, paraobtener la misma energıa en el evaporador teniendo en cuenta un rendimiento

182 7.3. Otros resultados
medio de 2,2. En la tabla 7.7 y en el diagrama de bloques 7.15 se muestran losresultados obtenidos, donde el color azul, representa el importe correspondienteal consumo electrico de un SRC y el color rojo refleja los gastos resultantes delsistema de refrigeracion solar.
En la mayorıa de los casos, el consumo del SRC es mayor que el de la ins-talacion solar, excepto en el ensayo numero 4 donde la energıa producida por lacaldera supera notablemente a la energıa del campo solar, debido a las abundan-tes nubes que aparecieron a lo largo del ensayo que hicieron inevitable el uso dela caldera de gas durante largos periodos de tiempo.
A pesar de que el gas natural es mas rentable que el consumo electrico, cuandola energıa de caldera supera el valor de 129,8798 kWh el gasto debido a la calderaes mayor que el coste medio de un SCR. Esto se debe a que el rendimiento delSRC es superior al rendimiento de SRS, por lo que, el segundo necesita masenergıa que el primero para producir el mismo frıo.
Tambien hay que decir que los resultados del consumo estan sujetos a lasvariaciones del mercado y que han sido calculados con valores medios para el mesde octubre, si los experimentos se hubieran realizado en epoca estival la diferenciaentre los costes de operacion de SRS y SRC serıa aun mayor.
Coste SRS Coste SRS Coste SRCCoste electrico bombas Coste gas
02/10/2006 0,9980 1,0829 5,715703/10/2006 0,9140 2,3232 5,728609/10/2006 0,9093 2,2870 4,954410/10/2006 0,8828 5,5150 5,210611/10/2006 0,9109 2,6785 4,306212/10/2006 0,8748 3,3521 4,587213/10/2006 0,8698 1,9641 4,682514/10/2006 0,9019 0,8742 5,5859
Cuadro 7.7: Costes sistema de refrigeracion solar frente coste sistema de refrigeracion
convencional (euros)

Capıtulo 7. Resultados del control global de la planta de refrigeracion solar 183
0 4 6 5 3 7 2 1 80
1
2
3
4
5
6
7
ensayos
euro
s
Coste SRSCoste SRC
Figura 7.15: Coste sistema de refrigeracion convencional frente coste de refrigeracion
solar
7.4. Conclusion
En este capıtulo se han mostrado los resultados obtenidos de diversas apli-caciones, de la estrategia de control a la planta solar de produccion de frıo. Seha llevado a cabo la explicacion en detalle de un determinado experimento y seha realizado un balance energetico de todos los ensayos ejecutados. Ademas sehan mostrado diferentes ındices que proporcionan el grado de bondad del con-trol realizado, como son los diversos coeficientes de comportamiento y los errorescuadraticos medios de los controladores.

184 7.4. Conclusion

Capıtulo 8
Conclusiones y trabajos futuros
Este capıtulo se ocupa de mostrar una vision general de las conclusiones de-talladas en cada capıtulo, se destacan las aportaciones del trabajo realizado y seenuncian las posibles lıneas de investigacion para su continuidad.
8.1. Conclusiones y aportaciones
En esta tesis se ha presentado una estrategia de control para controlar unaplanta solar de frıo situada en la azotea de los laboratorios del Departamento deIngenierıa de Sistemas y Automatica.
Con objeto de introducir las conclusiones, se resumen a continuacion, los pun-tos fundamentales desarrollados durante el proceso del trabajo:
1 Desarrollo de un algoritmo que calcula el punto de operacion optimo paraalcanzar el mayor rendimiento de la planta.
2 Desarrollo de una algoritmo para seleccionar los modos de funcionamientoy seleccion de controladores.
3 Desarrollo de controladores.
4 Aplicacion de la estrategia de control a la planta solar de frıo.
En base a los puntos anteriores se pueden enumerar las siguientes aportaciones:
185

186 8.1. Conclusiones y aportaciones
1 Una de las principales aportaciones de esta tesis ha consistido en abordar elcontrol de la planta desde el punto de vista energetico. Se ha desarrolladoun algoritmo que calcula el punto de operacion optimo de la planta paraobtener el mayor rendimiento posible de sus componentes. El algoritmocalcula en cada instante el mayor valor de cop que se puede alcanzar,teniendo en cuenta la demanda frigorıfica de la sala acondicionada. Calculalas referencias de las temperaturas de salida de colectores y del generadorası como el caudal del generador. El control se realiza mediante variacionesbien, en la temperatura del generador o bien en el caudal del generador.La inclusion de la optimizacion del rendimiento del sistema en el diseno delcontrol hace de esta estrategia un poderoso metodo que permite optimizarenergıa maximizando su rendimiento.
2 Se ha realizado un analisis detallado de la planta solar de frıo, donde se estu-dian las diferentes configuraciones que esta puede adoptar, definiendo ası losmodos de funcionamiento que se eligen automaticamente mediante un al-goritmo propuesto para tal efecto. En los modos de funcionamiento se hanconsiderados todas las posibles configuraciones de la planta. Destacar queen los modos se activa el sistema de acumulacion, tambien se ha tenido encuenta las configuraciones que utilizan solo la parte superior de los tanquesy tambien aquellas que usan todas las entradas y salidas simultaneamente.Tambien se ha detectado un fallo en el diseno de la planta implicando ladesestimacion de un posible modo de funcionamiento.
En cada modo de funcionamiento se ha llevado a cabo un estudio exhaustivode los caudales mas significativos del proceso incluso del caudal del sistemade acumulacion de energıa, el cual no se puede medir directamente de laplanta puesto que esta carece de caudalımetro para tal efecto.
Desde el punto de vista de control, cada modo de funcionamiento se consi-dera como un sistema de proceso diferente. Se estudian por separado y serealiza un analisis de las limitaciones y necesidades de cada uno de ellos.Se han considerado perturbaciones y restricciones cuando ha sido necesa-rio y se han empleado diferentes controladores para alcanzar los objetivospropuestos.
El algoritmo de seleccion de los modos de funcionamiento se ha desarrolladocon el objeto de maximizar el uso de energıa solar, maximizar el almacenajede agua caliente en los tanques y minimizar el consumo de gas natural delsistema de energıa auxiliar. La aplicacion del metodo propuesto a la plantareal, demuestra que es posible el cambio de modo de funcionamiento online y la conmutacion de controladores (segun el modo) sin deteriorar elcumplimiento de los objetivos.
3 Se ha aplicado a la planta solar de frıo el controlador predictivo basado en elpredictor de Smith (spgpc), demostrando que (i) para sistemas con tiempo

Capıtulo 8. Conclusiones y trabajos futuros 187
muerto, el filtro usado en el controlador spgpc, es el mas apropiado paraincrementar la robustez especialmente cuando se consideran incertidumbresen el retraso. (ii) La sintonizacion del filtro del controlador se basa en re-glas faciles e intuitivas que permiten obtener un buen compromiso entrecomportamiento y robustez. (iii) En la aplicacion particular sobre la plantade aire acondicionado solar, el controlador propuesto alcanza un buen com-portamiento en cuanto al seguimiento de la referencia y la compensacion deperturbaciones. El controlador spgpc es la estrategia de control mas apro-piada para usar en procesos donde es necesario considerar simultaneamenteperturbaciones medibles, restricciones e incertidumbres en el retardo a lahora de calcular la accion de control.
4 Otra de las aportaciones mas importante de esta tesis es el controlador predic-tivo con identificacion simultanea (gpcc) que integra en una misma funcionde coste, el seguimiento de la referencia y la estimacion de los parametrosdel modelo, adquiriendo las propiedades de un control dual. Como partedel modulo de identificacion se propone el algoritmo de identificacion inte-ligente (vii) que permite realizar la estimacion de los parametros con lasmedidas que posean riqueza dinamica desechando aquellas medidas redun-dantes y con poca excitacion. Se han mostrado diferentes aplicaciones delcontrolador gpcc a la planta solar, las cuales ponen de manifiesto el buencomportamiento del controlador para controlar la temperatura de salida decolectores, a pesar de los cambios en la dinamica del proceso debidos a laradiacion solar y a la temperatura del agua de entrada al campo solar.
5 Y por ultimo se ha llevado a cabo la aplicacion de la estrategia de controlpropuesta a la planta solar de frıo. Se ha controlado la potencia frigorıficademandada por la sala acondicionada desde las 11 : 00 hasta las 17 : 30,comprobandose el cumplimiento de los objetivos y demostrando que el meto-do propuesto es perfectamente valido para el control total de la planta.
Como conclusion final se deduce de todo lo anterior que la estrategia de controldesarrollada en la tesis demuestra su eficiencia en la aplicacion real a la plantasolar de frıo. El metodo propuesto permite mantener la sala bien acondicionadapara el confort de los usuarios, dando respuesta a la demanda frigorıfica, segunla carga termica de la sala, y optimizando el rendimiento total del sistema. Laaplicacion de la estrategia de control a la planta real demuestra que el metodopropuesto cumple los objetivos de control: responde a la demanda frigorıfica,maximiza el rendimiento del sistema, maximiza el uso de energıa solar, maximizael almacenaje de agua caliente en los tanques y minimiza el consumo de gas.

188 8.2. Futuras lıneas de investigacion
8.2. Futuras lıneas de investigacion
Como futuras lıneas de investigacion se pueden considerar los siguientes pun-tos:
1 Optimizacion de los modos de funcionamiento.
En la tesis se ha puesto de manifiesto la naturaleza hıbrida de la planta.Los diferentes componentes que la constituyen: el sistema solar, el sistemade energıa auxiliar y el sistema de acumulacion pueden trabajar simultaneao independientemente. Como la configuracion de la planta se puede realizaron-line manipulando las electrovalvulas y las bombas (on-off), el procesoresulta ser interesante desde el punto de vista del control hıbrido ya quepresenta variables continuas y variables logicas.
Una vez probada la estrategia de control que se ha desarrollado en la tesis, elsiguiente paso consistirıa en realizar un control hıbrido de la planta, dondelos modos de funcionamiento formen parte de la optimizacion del sistema.
2 Inclusion del Predictor de Smith con filtro en el controlador gpcc.
Como se ha demostrado en este trabajo, el filtro usado en el controladorspgpc, es el mas apropiado para incrementar la robustez especialmentecuando se consideran incertidumbres en el retraso. Puesto que el controladorgpcc se ha empleado para controlar la temperatura de salida del camposolar e identificar el sistema incluyendo el retardo, la inclusion del filtro yel compensador de retardo (Predictor de Smith) aportarıan mayor robustezal controlador gpcc
3 Resolucion del problema de optimizacion del controlador gpcc con nuevosalgoritmos.
El problema de optimizacion del controlador gpcc, es un problema comple-jo, en la tesis se ha optado por relajarlo, resolviendolo mediante un algoritmoque no obtiene el mınimo global, con el objetivo de reducir el coste compu-tacional para poder aplicarlo en tiempo real a la planta. Se podrıa ampliar elestudio resolviendo el problema con otros algoritmos de optimizacion (localy global).
4 Utilizar memoria de conjunto de ejemplares.
En la tesis, aunque en el metodo de ventana de indentificacion inteligentese ha incluido la memoria de conjuntos ejemplares, no se ha utilizado parala identificacion. Una posible ampliacion de este metodo consistirıa en elempleo de dicha memoria que podrıa servir para distinguir diferentes puntosde operacion.

Apendice A
Descripcion y modelo dinamicode la planta de produccion de frıo
A.1. Generalidades
La instalacion de refrigeracion solar del Departamento de Ingenierıa de Siste-mas y Automatica de la Universidad de Sevilla consta de un equipo de absorcion(BrLi-Agua), con una potencia frigorıfica nominal de 35 kW , junto con un sis-tema de aporte de energıa termica necesario para el funcionamiento del ciclo deabsorcion y un sistema de evacuacion de calor. La fuente de calor esta formadapor un conjunto de captadores solares planos que transforman la energıa incidenteen forma de radiacion en energıa interna del fluido caloportador (agua). En lascondiciones nominales, la energıa suministrada por el sistema de captacion es de50 kW .
Para las situaciones en los que la radiacion solar no sea suficiente, se cuenta conuna caldera de gas natural de 60 kW como sistema auxiliar de energıa. La energıadisipada por el sistema de refrigeracion por absorcion es evacuada mediante unatorre de refrigeracion.
El frıo generado por el sistema se emplea en refrigerar la segunda planta delos Laboratorios del Departamento. Adicionalmente, y para realizar pruebas deforma flexible, se dispone de un simulador de cargas consistente en una bomba decalor, que disipa el frıo generado y ademas permite simular distintos perfiles decarga. Se ha puesto especial enfasis en la optimizacion energetica de la operacionde la instalacion en distintas condiciones de trabajo.
189

190 A.2. Sistema de captacion
Para la obtencion de modelo dinamico de la planta se hace uso de las ecuacio-nes de balance de masa y energıa y algunas caracterısticas de los equipos sumi-nistrados por el fabricante. Los modelos obtenidos han sido validados con datosreales de operacion, obteniendo buenos resultados (ver (Delgado 2000)). Se tratade modelos denominados de ”caja gris”, en los que se mezcla el conocimiento deproceso mediante las ecuaciones termodinamicas e hidraulicas con la obtencionexperimental de algunos parametros fısicos de difıcil estimacion.
En el diagrama A.1 se puede ver el esquema de principio correspondiente a lainstalacion.
A.2. Sistema de captacion
El sistema de captacion (figura A.2) (151, 2m2) esta constituido por cuatrocampos de captadores solares made modelo 4000E y cada uno de los campos(37, 8m2) esta constituido por 18 captadores de 2.1 metros cuadrados de super-ficie util de captacion cada uno. Cada campo de captadores queda configuradoen 3 baterıas de 6 captadores cada una. Quedan fijamente orientados al Sur e in-clinados 30 con respecto a la horizontal. Se ubican sobre la estructura metalicasoporte disponible en la cubierta del edificio. Se han adoptado las precauciones yseparaciones necesarias para evitar las sombras de los obstaculos adyacentes.
Un colector solar puede ser modelado como un intercambiador de calor que ab-sorbe parte de la radiacion solar calentando el agua que circula por el y sufriendoalgunas perdidas termicas.
Las ecuaciones que representar su comportamiento se pueden obtener median-te el siguiente balance de energıa:
Ca
dTscm
dt= F (IG + U(Tamb − Tscm) +
2mscCp
AC
(Tsci − Tscm)
Tsco = 2Tscm − Tsci
donde Tsc,m es la temperatura media del agua dentro del captador (C), Tsc,i
es la temperatura de entrada (C), Tamb la temperatura ambiente (C), CA lacapacidad calorıfica por unidad de superficie del colector (J/m2 C), Cp la capa-cidad calorıfica del agua(J/kg C), U es el coeficiente de perdidas a la atmosfera(W/m2 C), IG la radiacion solar en la superficie del colector (W/m2), AC elarea del colector (m2), UE el coeficiente de perdidas con el ambiente, F es elfactor de eficiencia y msc el flujo de agua que circula por el captador (kg/s). La

Apendice A. Descripcion y modelo dinamico de la planta de produccion de frıo 191
TUBERÍA AGUA CALIENTE SANITARIA
SISTEMA DE PURGA
TUBERÍA AGUA DE RED
TUBERÍA SALIDA COLECTORES
TUBERÍA ENTRADA A COLECTORES
VÁLVULA DE RETENCIÓN
VASO DE EXPANSIÓN CERRADO
VÁLVULA DE SEGURIDAD
TERMÓMETRO
MANÓMETRO
BOMBA DE CIRCULACIÓN
VÁLVULA DE ESFERA
LEYENDA
M
T
Calderas de gas
Acumulador solar
Equipo de absorción
Intercambiador de carga
B4 B5
INSTALACIÓN DE REFRIGERACIÓN SOLAR
REF
7050
FECHA
OCT 97
ESCALA
S/E
Circuito de climatización
ESI INDUSTRIALES (SEVILLA)
ESQUEMA DE PRINCIPIO 03
Captadores solares
B1
B3.1 B3.2
M
Acumulador de inercia
Recuperador
B6.2
B6.1
Bomba de calor
Torre de refrigeración
Captadores solares
Acumulador de inercia
Torre de refrigeración
Bomba de calor
Circuito de climatización
Caldera de gas
Acumulador Equipo de absorción
Recuperador
Intercambiador de carga
INSTALACIÓN DE REFRIGERACIÓN SOLAR
ESI INDUSTRIALES ( SEVILLA )
ESQUEMA DE PRINCIPIO
Figura A.1: Esquema de principio de la instalacion
temperatura de salida del agua del colector, Tsc,o, se obtiene asumiendo que ladistribucion de la temperatura es lineal.

192 A.3. Sistema de acumulacion
Figura A.2: Sistema de captacion
La ecuacion de funcionamiento en el caso de que no circulara agua por loscaptadores serıa:
CE
dTscm
dt= UE(Tamb − Tscm)
donde CE es la constante de tiempo cuando la bomba B1 esta apagada.
A.3. Sistema de acumulacion
El sistema de acumulacion de agua caliente (figura A.3) esta constituido pordos depositos acumuladores de 2,500 litros de capacidad construidos en chapa deacero y disponen de revestimiento aislante de poliuretano expandido de 40 mmde espesor.
El conexionado de los depositos en el circuito secundario se podra realizaren paralelo o en serie con circulacion invertida en relacion con el circuito deconsumo. La evolucion termica de un deposito de acumulacion de energıa, sujetoa estratificacion termica, puede modelarse asumiendo que esta compuesto porN (N = 15) secciones volumetricas completamente mezclados, como muestra lafigura A.4. El grado de estratificacion viene dado por el valor de N . Si N = 1, eldeposito se modela como un tanque completamente mezclado y no se produce unefecto de estratificacion. En este trabajo se ha tomado N = 10.

Apendice A. Descripcion y modelo dinamico de la planta de produccion de frıo 193
Figura A.3: Sistema de acumulacion
El modelo evalua las perdidas de cada nodo hacia el exterior, a traves delcoeficiente de perdidas (UAf ). En este modelo se asume la siguiente hipotesis, elflujo de fluido hacia arriba y hacia abajo desde cada nodo esta completamentemezclado antes de entrar en cada segmento. En terminos de la figura A.5 implicaque m1 = m2 y m3 = m4 y el flujo resultante, hacia arriba o hacia abajo,esta determinando. Un balance de energıa en el elemento ith (despreciando lasperdidas) da:
MiCp
dTi
dt= (m1 − m3)Cp(Ti−1 − Ti) si m1 ≥ m3
(m3 − m1)Cp(Ti+1 − Ti) si m1 < m3
La figura A.6, representa el deposito real instalado, con las entradas y salidasque posee. Por la entrada central se alimenta al deposito con agua caliente queproviene del sistema de captacion solar. Mientras que por la salida central ali-mentamos a los campos de captadores con el agua acumulada en el deposito. Porla entrada inferior introducimos el agua frıa procedente de la carga alimentada,generador de la maquina de absorcion o circuito de climatizacion. El agua calien-te suministrada a la carga calorıfica es extraıda del deposito de acumulacion porla salida superior. El numero de nodos utilizado para la descripcion matematica

194 A.3. Sistema de acumulacion
Figura A.4: Deposito de acumulacion estratificado
Figura A.5: Flujo entre nodos
del deposito de acumulacion es de 12, 2 de ellos con un volumen distinto al delresto. Estos dos volumenes se corresponden con los recintos esfericos de las partessuperior e inferior del deposito, y el resto representan la region cilındrica central.Las ecuaciones de balance para cada nodo son las siguientes:

Apendice A. Descripcion y modelo dinamico de la planta de produccion de frıo 195
Figura A.6: Flujos de entrada y salida del acumulador
CpV1ρdT1
dt= mL(T2 − T1) + UA1(Tamb − T1) + UW (T2 − T1)
Para i = 1
CpV2ρdTi
dt= mL(Ti+1 − Ti) + UA2(Tamb − Ti) + UW (Ti−1 − Ti) + UW (Ti+1 − Ti)
Para i = 1, 2, 3, 4
CpV2ρdT5
dt= mk(TH − T5) + mL(T6 − T5) + UA2(Tamb − T5) + UW (T4 − T5) + UW (T6 − T5)
Para i = 5
CpV2ρdTi
dt= mk(Ti−1 − Ti) + mL(Ti+1 − Ti) + UA2(Tamb − Ti) + UW (Ti−1 − Ti) +
UW (Ti+1 − Ti)
Para i = 6, 7, 8
CpV2ρdTi
dt= mL(Ti+1 − Ti) + UA2(Tamb − Ti) + UW (Ti−1 − Ti) + UW (Ti+1 − Ti)
Para i = 9, 10, 11
CpV1ρdT12
dt= mL(TL − T12) + UA1(Tamb − T12) + UW (T11 − T12)
Para i = 12
donde U es el coeficiente de perdidas por unidad de superficie del deposito cuyasunidades son W Cm2, UW es un coeficiente de transmision de calor entre un

196 A.4. Sistema de energıa auxiliar
volumen de control y otro (W Cm2) y A1, A2 son la superficie del volumen decontrol en contacto con el ambiente. El resto de los coeficientes tienen el siguientesignificado: V1,2, el volumen del nodo en m3; ρ, densidad del agua; Cp capacidadcalorıfica del agua; mL, flujo de agua desde la carga; TL, temperatura del aguade la carga; mk, flujo de agua desde el sistema de captacion; Th, temperatura delagua del sistema de captacion y Tamb, temperatura del ambiente.
A.4. Sistema de energıa auxiliar
El sistema de energıa auxiliar (figura A.7) esta constituido por una caldera degas natural de 60 kW de potencia. La conexion hidraulica se realiza de forma queen el circuito de retorno, el agua es distribuida entre el sistema solar y el auxiliaren funcion de la temperatura de entrada al generador del equipo de refrigeracionUn modelo completo se puede ver en (Claquin, Carriere & Rocaires 1994). Dicho
Figura A.7: Sistema de energıa auxiliar
modelo considera la evolucion de dos temperaturas: la temperatura del gas (Tch)y la temperatura de salida del agua (Tgw,o):
Ca =dTgw,o
dt= Uaw(Tamb − Tgw,o) + Ugw(Tch − Tgw,o) + KCpmgh(Tgw,i − Tgw,o)

Apendice A. Descripcion y modelo dinamico de la planta de produccion de frıo 197
Cg
dTch
dt= Uag(Tamb − Tch) + Uwg(Tgw,o − Tch) + P
donde Tgw,i es la temperatura de entrada del agua a la caldera, mgh el caudalde agua que circula por la caldera (kg/s), Ca es la capacidad calorıfica del agua(W/C), Cg la capacidad calorıfica del gas (W/C), Uaw,Ugw,Uwg,Uag son los co-eficientes de transferencia de calor (W/C), y P es la potencia del quemador(W ).
Hay que decir que el quemador se encendera si se cumple que mgh sea mayoro igual a 1500 l/h , mientras que si es menor, estara apagado y habrıa que anularel termino P de la ecuacion.
Finalmente en el caso de que la caldera estuviera apagada, las ecuaciones quedefinirıan ambas temperaturas serıan:
Ca =dTgw,o
dt= UE(Tamb − Tgw,o)
Ca =dTch
dt= UE(Tamb − Tch)
A.5. Equipo de absorcion
El equipo de refrigeracion solar por ciclo de absorcion marca Yazaki modeloWFC10 (figura A.8) tiene una potencia frigorıfica nominal de 35 kW y funcionacon aportacion de agua caliente con una caudal de 2,38 l/s y temperaturas deentrada entre 75 y 100 C al generador y produccion de 1,67 l/s de agua frıaentre 7 y 12 C. Dispone de una sola etapa, y utiliza agua como refrigerante yel absorbente es una solucion de bromuro de litio y agua. El COP es de 0,7. Lasecuaciones que describen su comportamiento son las siguientes:
Cgm
dTg,o
dt= Cpmg(Tg,i − Tg,o) + Qg
Cem
dTe,o
dt= Cpme(Te,i − Te,o) + QE
QE = Cpmg(Tg,i − Tg,o)COPn
siendo mg la masa de agua que fluye por el generador (kg/s), me el caudal quecircula por el evaporador (kg/s), Tg,i la temperatura de entrada al generador (C),Tg,o su temperatura de salida (C), Te,o la temperatura de salida del evaporador(C), Te,i la temperatura de entrada a dicho evaporador (C), Cgm y Cem son lascapacidades calorıficas del generador cuando la maquina esta encendida (W/C),

198 A.5. Equipo de absorcion
Figura A.8: Equipo de absorcion
Uagm y Uae son los coeficientes de perdidas termicas, QG y QE son las potenciasde intercambio del generador y evaporador respectivamente (W) y COPn el valornominal de COP .
La maquina de absorcion se enciende solo si la temperatura de entrada algenerador esta comprendida entre los 75C y los 100C, ambos inclusive. Si elagua que le llega no esta en ese intervalo de temperatura la maquina no arran-cara siendo en este caso las ecuaciones:
Cgo
dTg,o
dt= Cpmg(Tg,i − Tg,o)
Ceo
dTe,o
dt= Cpme(Te,i − Te,o)
donde Cgo y Ceo son las capacidades calorıficas del generador y evaporador cuandola maquina de absorcion esta apagada(W/C).
Para terminar si la planta esta en un modo de funcionamiento en el que lamaquina de absorcion no interviene, sus ecuaciones quedarıan definidas de lasiguiente forma:
CE
dTg,o
dt= Uagm(Tamb − Tg,o)
CE
dTe,o
dt= Uaem(Tamb − Tg,o)

Apendice A. Descripcion y modelo dinamico de la planta de produccion de frıo 199
A.6. Sistema de evacuacion de calor
El sistema de evacuacion de calor (figura A.9) dispone de una potencia util,para las condiciones nominales de trabajo, de 85 kW y los niveles termicos a losque se realiza esta evacuacion deben estar comprendidos entre 25 y 31C, con uncaudal nominal de 4,05 l/s. Como se acaba de ver, una de las simplificaciones que
Figura A.9: Sistema de evacuacion de calor
se ha hecho es que en el modelo se extrae calor del agua, pero suponemos que elaire no sufre variacion de su temperatura. La ecuacion que define este intercambioes:
VS
mw
dTwsal
dt= Twe −
Qtransf
mwCp
− Twsal
donde Twe es la temperatura del agua a la entrada de la torre (C), Twsal latemperatura del agua a la salida de la torre (C), el caudal de agua que recorrela torre (l/s), Cp la capacidad calorıfica del agua y Qtransf es el calor transferidoal aire y viene dado por la siguiente ecuacion:
Qtransf = BEma(hSWE − hAE)
donde B es un coeficiente para calibrar la temperatura de salida, E es la eficienciade la torre, ma el caudal de aire que recorre la torre, hSWE la entalpıa de aire

200 A.7. Simulador de Cargas
saturado en condiciones de agua de entrada y hAE la entalpıa aire humeda deentrada.
Las entalpıas hSWE y hAE en funcion de las humedades de los caudales de aireevaluados en las condiciones a las que se calculen dichas entalpıas. Como pasointermedio, se calculan las presiones de saturacion en dichas condiciones. Paraobtener dichas presiones empleamos unas tablas psicometricas. Las ecuacionespara hallar dichas entalpıas serıan las siguientes:
P1 = exp(A1 + TAH(A2 + THAA3))
w1 = 0,622P1
P0 − P1
hAE = 0,4299(THA + w1(2501− 1,805THA))7,6866
P2 = exp(A1 + THA(A2 + THAA3))
w2 = 0,622P2
P0 − P2
hSWE = 0,4299(TWE + w2(2501− 1,805TWE))7,6866
siendo Pi la presion de saturacion, P0 la presion atmosferica, wi la humedadespecıfica, A1,A2 y A3 son coeficientes que dependen del rango donde se encuentrela temperatura. Para concluir THA es la temperatura humeda del aire que seobtiene a partir de una tabla segun la temperatura ambiente Tamb y la humedadrelativa del ambiente HR.
A.7. Simulador de Cargas
El sistema de climatizacion esta representado por un sistema de simulacionde cargas termicas que permitira establecer y controlar la demanda de energıa.Las potencias maximas seran 50 kW para calor y 35 kW para frıo.
Adicionalmente se ha acoplado la instalacion a la climatizacion de las zonascomunes de los despachos de planta 2 del Instituto, para demostracion real delfuncionamiento de una planta de climatizacion mediante energıa solar.
Se utiliza un intercambiador agua-agua que permitira simular cargas variablesentre 0 y 50 kW mediante una valvula de tres vıas que esta controlada por unprograma que define la potencia que se demanda en cada momento. Se estable-ce un caudal de circulacion constante por lo que la demanda de energıa quedadefinida por las variaciones de temperatura en el circuito.

Apendice A. Descripcion y modelo dinamico de la planta de produccion de frıo 201
Las condiciones nominales de diseno del intercambiador de calor de placas sonlas siguientes:
Potencia: 50 kW .
Circuito primario: - Caudal: 6,000 l/h - Temperaturas: 50/57 C
Circuito secundario: - Caudal: 6,000 l/h - Temperaturas: 9/16 C
Y las condiciones de funcionamiento para refrigeracion son:
Potencia 35 kW .
Circuito primario: - Caudal: 6,000 l/h - Temperaturas: 9/14 C
Circuito secundario: - Caudal: 6,000 l/h - Temperaturas: 45/40 C
Se dispone de una bomba de calor que se utiliza como generador de calor y/ofrıo de las potencias equivalentes. Se ha instalado un acumulador de inercia de1,000 litros para evitar continuos arranques y paradas de la bomba de calor.
A.8. Circuito Hidraulico
La interconexion de todos los sistemas citados se realiza con el correspondientecircuito hidraulico constituido por el trazado de tuberıas, con recubrimiento ais-lante para los circuitos de frıo y calor, bombas de circulacion, vaso de expansion,sistemas de seguridad, llenado, purga, valvulerıa y accesorios.
El dimensionado de los componentes del circuito hidraulico esta realizadopara las condiciones nominales de trabajo del equipo de absorcion. Dado quelos captadores se pueden utilizar directamente para alimentar el generador delequipo, se ha proyectado el circuito de captacion para el caudal de 8,400 l/h, lo quesupone un caudal unitario de diseno de hasta 60 litros por hora y metro cuadrado;no obstante, las condiciones nominales de trabajo del campo de colectores seestablecen en 30 l/hm2.
Las tuberıas de todos los circuitos, cuyos trazados quedan reflejados en losesquemas de lınea, son de cobre de las dimensiones especificadas con las unionessoldadas por capilaridad.

202 A.9. Sistema electrico e instrumentacion
Se dispone de un sistema de expansion, constituido por 2 vasos de 200 litrosde capacidad, para mantener las condiciones de presion de los circuitos entre losvalores de 1,5 y 3 kg/cm2.
A.9. Sistema electrico e instrumentacion
El funcionamiento de la instalacion esta gobernado por un doble sistemade control, uno constituido por elementos convencionales alojados en el cuadroelectrico y otro utilizando control por computador, estando localizado el sistemade supervision en los laboratorios del Instituto Andaluz de Automatica y Roboti-ca. Ello permite, por un lado, realizar ensayos comparativos de prestaciones conambos sistemas y, por otro, introducir mejoras en las estrategias de operacion dela planta sin paralizar el funcionamiento de la instalacion.
El cuadro electrico dispone de selectores para controlar el funcionamientode todos los equipos con conmutacion automatica y manual de marcha y paro.Se dispone de los elementos de senalizacion necesarios para visualizar el estadode funcionamiento de bombas y de la conmutacion entre el sistema de controlconvencional y el control por computador.
Se han colocado mas de 60 sensores, 9 bombas, 52 electrovalvulas y 3 valvulasde regulacion, que permiten la medida de caudal, temperatura, presion, radiacion,velocidad de viento, etc., lo que proporciona una adecuada monitorizacion de lainstalacion.
A.10. Sistema de Control
El sistema de control por computador permite una realizacion automatizadade ensayos y proporciona la flexibilidad necesaria para ensayar las estrategiasoptimas de operacion de la planta en diversas situaciones, tanto las producidasdurante el funcionamiento de la instalacion de climatizacion de los laboratorioscomo las provocadas intencionadamente mediante el simulador de carga.
Al tratarse de una planta experimental, ha sido dotada de un sistema decontrol muy flexible, que permite la operacion de la planta en distintas configu-raciones y extrae toda la informacion del estado de la misma para su posterioranalisis. La instrumentacion esta sobredimensionada, de manera que se han co-

Apendice A. Descripcion y modelo dinamico de la planta de produccion de frıo 203
locado muchos mas sensores de los necesarios para una operacion normal de laplanta.
De esta forma se pueden conocer todos los flujos de energıa entre los distin-tos modulos (captadores, maquina de absorcion, acumuladores, etc.), bien paraanalizar el comportamiento de cada uno de ellos por separado, o bien para inte-grarlos todos en una operacion optima. Se monitorizan asimismo los estados defuncionamiento de todos los equipos.
El sistema de control esta distribuido entre la azotea y la planta baja, dondese encuentra el puesto de operacion. La plataforma elegida para integrar todo elsistema es IT-Simatic (SIEMENS) (Nunez-Reyes & Zafra-Cabeza 2001), (Zafra-Cabeza & Nunez-Reyes 2001). Este sistema esta constituido por una red arcnet(2,5 Mb) a la que estan conectados un pmc y una estacion de trabajo. El controla-dor (pmc) se comunica con la planta a traves de un bus de campo (Profibus), quepermite disponer toda la instrumentacion (PT100, caudalımetros, piranometros,higrometros, variadores, valvulas, etc), de la instalacion de forma distribuida. Enel esquema de la figura A.10 puede verse dicha distribucion.
Figura A.10: Esquema de control distribuido

204 A.10. Sistema de Control
Figura A.11: Sinoptico de la planta
La plataforma IT-Simatic, es un sistema de control en tiempo real adecuadopara la automatizacion y el control de plantas industriales. Este sistema esta cons-tituido por diferentes modulos, cada uno con funciones especıficas. Dispone demodulos ihm para interfaz con el usuario, graficos, archivo de historicos, gestionde eventos, gestion de alarmas, etc. necesarios para una operacion en continuode la instalacion. Todos los modulos son independientes y comparten una basede datos donde se guardan todas las variables. La arquitectura es del tipo Clien-te/Servidor, lo que permite que todas las funciones sean distribuidas y que lainstalacion pueda operarse desde varios puestos de trabajo.
La comunicacion con el usuario se realiza a traves de un sinoptico (figuraA.11) que consta de una pantalla principal, en la que aparece un esquema generaldonde se visualizan tanto las variables del sistema como el estado de los elemen-tos constitutivos del mismo. Y una serie de pantallas auxiliares para equipos ycontroladores. A traves de estas pantallas el usuario puede disponer de toda lainformacion necesaria y actuar sobre las variables que considere oportuno. O bienconfigurar la planta en un determinado modo de operacion en automatico.

Apendice A. Descripcion y modelo dinamico de la planta de produccion de frıo 205
A.10.1. OPC
La comunicacion entre el SCADA y la plataforma de los controladores (Ma-tlab) se realiza mediante OPC (Ole for Process Control) es el estandar creadoen colaboracion de un numero de empresas de software y hardware de automa-tizacion, basado en la tecnologıa OLE/COM/DCOM de Microsoft, Inc. Dichoestandar crea un interfaz comun, para comunicar sistemas y dispositivos. El ob-jetivo principal es obtener un software de control o monitorizacion que no dependade las caracterısticas hardware de las industrias.
las librerıas empleadas en la tesis (Nunez-Reyes & Payseo-Dıaz 2003) se crea-ron durante la participacion en el proyecto NEOxITE (Next gEneration OpenControl System InterneT trEady), perteneciente al V PROGRAMA MARCO deinvestigacion europea. Que consistio en el desarrollo de herramientas software decontrol y simulacion avanzadas.
Las aplicaciones que requieren servicios, es decir datos, desde el nivel de auto-matizacion para procesar sus tareas, los piden como clientes desde los componen-tes de automatizacion, quienes a la vez proveen la informacion requerida comoservidores. La idea basica del OPC esta en normalizar el interfaz entre el servidorOPC y el cliente OPC independientemente de cualquier fabricante particular.
Los servicios prestados por los servidores para clientes por medio del inter-faz OPC tıpicamente implican la lectura, cambio y verificacion de variables deproceso. Mediante estos servicios es posible operar y controlar un sistema. Losservidores OPC apoyan el nexo de tales aplicaciones a cualquier componentede automatizacion que este en red por medio de un bus de campo o EthernetIndustrial.
El esquema general de la conexion, mostrado en la figura A.12, incluye elservidor OPC de NEOxITE y conectados a el los distintos modulos de simulacion,control y un HMI (Human Machine Interface) para supervision.
Se han realizado dos prototipos para probar las capacidades del esquema ante-rior, de manera que desarrollando clientes OPCpara cada entorno de simulacion ode control, se logre la comunicacion con el servidor vıa OPC. El primer prototipoincluye simulador, control y HMI realizados en Matlab-Simulink conectados alservidor desde diferentes maquinas gracias al desarrollo de un cliente OPC paraMatlab-Simulink.

206 A.10. Sistema de Control
SERVIDOR
OPC
NEOXITE
SIMULADORES
Planta Ecosimpro
Planta Simulink CLIENTE OPC
MATLAB
CLIENTE OPC
SOFTING
CONTROL AVANZADO
GPC Simulink
GPC OPTIMAX
CLIENTE OPC
MATLAB
CLIENTE OPC
SOFTING
HMI Simulink
CLIENTE OPC
MATLAB
HMI NEOXITE
Figura A.12: Esquema general

Bibliografıa
AFEAS (2005), ‘Production, sales and atmospheric emissions of fluorocarbonsthrough 2003’, AFEAS (Alternative Fluorocarbons Environmental Accepta-bility Study) www.afeas.org .
Afonso, A. (2005), ‘Refrigeration systems; classification, research and develop-ment’, 2 IBERAVACR, Encuentro Ibeico de Climatizacio y refrigeracion delas Escuelas de Ingenieria de Portugal y Espana .
Agrawal, D. & Menon, V. (1993), ‘Finite-time carnot refrigerator with wall gainand product loads’, J. Appl. Phys. 74(4), 2153–2158.
Ajona-Maeztu, J. (2003), ‘Aprovechando el calor del sol para climatizar nuestrosedificios’, Climatizacion 2003 .
Akaike, H. (1973), ‘Information theory and an extension of the maximum likeli-hood principle’, In: B.N. Petrov and F. Csaki, Editors,Second InternationalSymposium Information Theory pp. 267–281.
Albertos, P. & Ortega, R. (1989), ‘On generalized predictive control: Two alter-native formulations’, Automatica 25(5), 753–755.
Anderson, B. (1985), ‘Adaptative systems, lack of persistent excitation and burs-ting phenomenon’, Automatica 21, 247–258.
Arahal, M., Berenguel, M. & Dıaz, F. R. (2006), ‘Tecnicas de prediccion conaplicaciones en ingenierıa’, Secretariado de publicaciones de la Universidadde Sevilla .
Astrom, K. & Wittenmark, B. (1989), Adaptive Control, Addison-Wesley.
Atmaca, I. & Yigit, A. (2003), ‘Simulation of solar-powered absorption coolingsystem’, Rebewable Energy 28, 1277–1293.
Badgwell, T. (1997), ‘Robust model predictive control of stable linear systems’,Int. journal of Control 68(4), 797–818.
207

208 BIBLIOGRAFIA
Balaras, A., Grossman, G., Henning, H., Ferreira, C. A., Podesser, E., Wang,L. & Wiemken, E. (2007), ‘Solar air conditioning in european overview’,Renewable and Sustainable Energy Reviews 11, 299–314.
Bar-Shalom, Y. & Tse, E. (1976), ‘Concept and methods in stochastic control’,Control and Dynamic Sustems 12, 99–172.
Bayard, D. & Eslami, M. (1985), ‘Implicit dual control for general stochasticsystems’, Optimal Control Applications and Methods 6, 286–279.
Beckman, W. & Klein, S. (1978), ‘A general design method for closed-loop solarenergy systems’, Solar Energy .
Bemporad, A. & Morari, M. (1999a), ‘Control of system integrating logic, dyna-mics and constraints’, Automatica 35, 407–427.
Bemporad, A. & Morari, M. (1999b), ‘Robust model predictive control: A survey’,A. Garulli, A. Tesi and A. Vicino, (Editores) Robustness in Identificationand Control pp. 207–226.
Bertsekas, D. (1976), ‘Dynamic programming and stochastic control’, OptimalControl Applications and Methods .
Bhardwarj, P., Kaushik, S. & Jain, S. (2003), ‘Finite time optimization of an en-doreversible and irreversible vapor absorption refrigeration system’, EnergyConversion and Management 44, 1131–1144.
Birmiwal, K. (1994), ‘A new adaptive lqg control algorithm’, Int. J. Adapt. Con-trol Signal Process 8, 287–295.
Blanchard, C. (1980), ‘Coefficient of performance for finite speed heat pump’, J.App. Phys. 51(4), 2471–2472.
Blasco, F. (1999), Control predictivo basado en modelo mediante la icorporacionde tecnicas de optimizacion heurıstica. Aplicacion a procesos no lineales andmultivariables, PhD thesis, Universidad Politecnica de Valencia, Valencia.
Blascos, F., Martınez, M., Herrero, J., Ramos, C. & Sanchıs, J. (2006), ‘Modelbased predictive control of greenhouse climate by reducing energy and waterconsumption’, Computers and Electronics in Agriculture .
Butz, L., Beckman, W. & Duffie, J. (1974), ‘Simulation of a a solar heating andcooling system’, Solar Energy 16, 129–136.
Camacho, E. (1993), ‘Constrained generalized predictive control’, ieee Transac-tions on Automatic Control 38(2), 327–332.

BIBLIOGRAFIA 209
Camacho, E., Berenguel, M. & Rubio, F. (1997a), Advanced control of a solarplants, Springer, London.
Camacho, E., Berenguel, M. & Rubio, F. (1997b), Advanced Control of SolarPower Plants, Springer-Verlag, London.
Camacho, E. & Bordons, C. (2004), 2nd Edition. Model Predictive Control, Sprin-ger Verlag, London.
Camacho, E., Rubio, F. & Gutierrez, J. (1988), ‘Modelling and simulation of asolar power plant with a distributed collector system’, Int. IFAC Symp. onPower Systems Modelling and Control Applications .
Camara-Zapata, J., Juan-Igualada, J. & Perea, M. (2004), ‘Climatizacion solarpor absorcion: modelizacion y simulacion en la comunidad de murcia’, EraSolar (119), 59–66.
Cardoso, A., Henriques, J. & Dourado, A. (1999), ‘Fuzzy supervisor and feedfor-ward control of a solar power plant using accesible disturbances’, EuropeanControl Conference ECC’99 .
Carnot, S. (1824), ‘Reflexions sur la puissance motrice du feu et sur les machinespropes a developper cette puissance’.
Carotenuto, L., Cava, M. L., Muraca, P. & Raiconi, G. (1986), ‘Feedforwardcontrol for the distributed parameter model of a solar power plant’, LargeScale Systems 11, 233–241.
Carotenuto, L., Cava, M. L. & Raiconi, G. (1985), ‘Regular design for the bili-near distributed parameter of a solar power plant’, Int. J. Systems Science16, 885–900.
Casals, X. (2006), ‘Solar absorption cooling in spain: Perspectives and outcomesfrom the simulation of recent installations’, Renewable Energy 31, 1371–1389.
Chaves, V. (1999), ‘Instalacion de energıa solar termica con acumulacion distri-buida’, PFC .
Chen, H. & Allgower, F. (1998), ‘A computationally attractive nonlinear predic-tive control scheme with guaranteed stability for stable systems’, Journal ofProcess Control .
Chen, L., Li, Y., Sun, F. & Wu, C. (2002), ‘Optimal performance of an irreversibleabsoption refrigetrator’, Exergy and International Journal 3, 167–172.
Chow, C. & Clarke, D. (1994), ‘Actuator nonlinearities in predictive control’, EnD.W. Clarke (Editor) Advances in Model-Based Predictive Control pp. 245–259.

210 BIBLIOGRAFIA
Claquin, S., Carriere, A. & Rocaires, F. (1994), ‘Modelling and application ofadaptive control to a gas heater’, Proceedings of the Third IEEE Conferenceon Control Applications .
Clarke, D. (1988), ‘Application of generalized predictive control to industrial pro-cesses’, ieee Control Systems Magazine 122, 49–55.
Clarke, D. (1994), ‘Advances in model-based predictive control’, En D.W. Clarke(Editor) Advances in Model-Based Predictive Control pp. 3–21.
Clarke, D. & Mohtadi, C. (1989), ‘Properties of generalized predictive control’,Automatica 25(6), 859–875.
Clarke, D., Mohtadi, C. & P.S.Tuffs (1987a), ‘Generalized Predictive Control.Part I. The Basic Algorithm’, Automatica 23(2), 137–148.
Clarke, D., Mohtadi, C. & P.S.Tuffs (1987b), ‘Generalized predictive control. partii extensions and interpretations’, Automatica 23(2), 149–160.
Clarke, D., Mothadi, C. & Tuffs, P. (1987), ‘Generalized predictive control. parti the basic algorithm’, Automatica 23(2), 137–148.
Clarke, D. & Scattolini, R. (1991), Constrained receding-horizon predictive con-trol, Vol. 138, Proceedings iee, pp. 347–354.
Conde, A. G. & Marquez, G. L. (1991), ‘The potencial for solar assisted coolingin southern european countries’, POSAC Proyect .
Cutler, C. & Ramaker, D. (1980), Dynamic matrix control. a computer controlalgorithm, San Francisco,ca,usa.
Delgado, J. (2000), ‘Modelado y simulacion de una planta solar de climatizacion’,PFC .
Deshpande, P. & Ash, R. (1981), Elements of Computer Process Control, ISA.
Duffie, J. & Beckman, W. (1991), ‘Solar engineering of thermal processes’.
Fan, Y., Luo, L. & Souyri, B. (In Press 2006), ‘Review of solar sorption refrigera-tion technologies: Development and applications’, Renewable and SustainableEnergy Reviews .
F.Dorado, Nunez-Reyes, A., Camacho, E. & Bordons, C. (2000), ‘Modelado ycontrol de un horno de yeso rotativo continuo’, XXI Jornadas de Automatica.
Feldbaum, A. (1960-61), ‘Dual control theory I-IV’, Automation and RemoteControl 21,21,22,22, 874–880,1033–1039,1–12,109–121.

BIBLIOGRAFIA 211
Feldbaum, A. (1965), ‘Optimal control systems’, Automation and Remote Control.
Filatov, N. & Uunbehauen, H. (2004), Adaptive Control Dual. Theory and Appli-cations, Springer-Verlag), Berlin Heidelberg.
Froisy, J. (1994), ‘Model predictive control: past, present an future’, isa Tran-sactions 33, 235–243.
Garcıa, C. & Morshedi, M. (1986), ‘Quadratic programming solution od dynamicmatrix control qdmc’, Chemical Eng. Commun. 46, 73–87.
Garcıa, C., Prett, D. & Morari, M. (1989), ‘Model predictive control: Theory andpractice- a survey’, Automatica 25(3), 348–355.
Genceli, H. & Nikolaou, M. (1995), ‘Design of robust constrined model-predictivecontrollers with voterra series’, AIChE Journal 41(9), 2098–2107.
Genceli, H. & Nikolaou, M. (1996), ‘New approach to constrained model predicti-ve control with simultaneous model identification’, AIChE Journal 42, 2857–2869.
Goodwin, G. & Sin, K. (1984), Adaptive filtering: prediction and Control, PrenticeHall.
Gordon, J. & Ng, K. C. (2000), Cool Thermodynamics, Cambridge InternationalScience Publishing, England.
Greco, C., Menga, G., Mosca, E. & Zappa, G. (1984), ‘Performance improve-ment of self-tuning controllers by multistep horizons: the musmar approa-ch’, Automatica 20, 681–700.
Grosdidier, P., Froisy, B. & Hammann, M. (1988), ‘The idcom-m controller’, EnModel based process control. Proceedings of the ifac Workshop .
Grossman, G. (2002), ‘Solar-powered systems for cooling, dehumidification andair-conditioning’, Solar Energy 72, 53–62.
Henning, H. (2004), Solar assisted air-conditioning in buildingsa handbook forplanners, Wien: Springer.
Ishibashi, T. (1977), ‘The result of cooling operation of yazaki experimental solarhouse ’one”, Solar Energy .
Johnston, A. (1980), ‘Ammonia/water absorption cycles with relatively high ge-nerator temperatures’, Solar Energy .

212 BIBLIOGRAFIA
Keyser, R. & Cuawenberghe, A. V. (1985), ‘Extended prediction self-adaptivecontrol’, IFAC Symposium on Identification and System Parameter Estima-tion pp. 1317–1322.
Keyser, R. D. (1991), ‘Basic principles of model based predictive control’, 1st.European Control Conference 1(1), 1753–1758.
Kinnaert, M. (1989), ‘Adaptive generalized predictive controller for mimo sys-tems’, Int. Journal of Control 50(1), 161–172.
Klein, A., Duffie, J. & Beckman, W. (1974), ‘Transient considerations of flat-platesolar collectors’, Trans. of the ASME Journal of Engineering and Power96, 109.
Klein, S. (1992), ‘Design considerations for refrigeration cycles’, Int. J. Refrig.15(3), 181–185.
Kohlenbach, P. (2006), Solar cooling with absorption chillers:Control strategiesand transient chiller performance, PhD thesis, Technischen Universitat Ber-lin.
Kohne, R., Oertel, K. & Zunft, S. (1996a), ‘Investigation of control and simulationof a solar process heat plants using a flexible test facility’, Solar Energy56(2), 169–182.
Kohne, R., Oertel, K. & Zunft, S. (1996b), ‘Investigation of control and simula-tion of solar process heat plants using a flexible test facility’, Solar Energy56, 169–182.
Kouvaritakis, B., Rossiter, J. & Ju, G. (1997), ‘Robust stable generalized predic-tive control’, Int. journal of Control 67(3), 411–434.
Kznetsov, A. & Clarke, D. (1994), ‘Application of constrained gpc for improvingperformance of controlled plants’, En D.W. Clarke (Editor) Advances inModel-Based Predictive Control pp. 318–329.
Lamp, P. & Ziegler, F. (1998), ‘European research on solar-assisted air conditio-ning’, Int. J. Refrig. 21, 89–99.
Lazzarin, R. (1980), ‘Steady and transient behaviour of libr absorption chillers oflow capacity’, International Journal of Refrigeration 3(4), 213–218.
Lee, J. & Yu, Z. (1997), ‘Worst-case formulations of model predictive control forsystems with bounded parameters’, Automatica 33(5), 763–781.
Lemos, E. M. J. & Zhang, J. (1990), ‘Stabilizing i/o receding horizon control’.

BIBLIOGRAFIA 213
Lemos, J. & Mosca, E. (1985), ‘A multipredictor based lq self-tuning controller’,ifac, Symp. on identification and system parameter estimation .
Li, Z. & Sumathy, K. (2000), ‘Technology development in the solar absorptionair-conditioning systems’, Renew Sustain Energy Rev 4, 267–293.
Li, Z. & Sumathy, K. (2001), ‘Experimental studies on a solar poweres air con-ditionning system with partitioned hot water storage tank’, Solar Energy71(5), 285–297.
Limon, N. (2002), ‘Estudio de sistemas de absorcion avanzados para operar congas natural y asistidos por energıa solar’, I Taller de Refrigeracion y AireAcondicionado Solar .
Linkens, D. & Mahfouf, M. (1994), ‘Generalized predictive control gpc in clinicalanaesthesia’, En D.W. Clarke (Editor) Advances in Model-Based PredictiveControl pp. 402–414.
Linkers, D. & Mahfonf, M. (1994), Advances in Model-Based Predictive Con-trol.Chap. Generalizad Predictive Control in Clinical Anaesthesia, OxfordUniversity Press.
Ljung, L. (1987), System identification for the user, Prentice Hall, New Jersey.
Lucas, L. (1988), ‘Iir news3’, International Journal of Refrigeration 21(2).
Martınez, M., Sennet, J. & Blasco, F. (1996), ‘A comparative study of classicalvs genetic algorithm optimization applied in gpc controller’, ifac Worldcongerss .
Martınez, M., Sennet, J. & Blasco, F. (1998), ‘Generalized predictive controlusing genetic algorithms (gagpc)’, Engineering applications of artificial in-telligence 11(3), 355–368.
Mayne, D. (2000), Nonlienar model predictive control: challenges and opportuni-ties, Birkhauser Verlag, chapter Nonlinear Model Predictive Control, pp. 23–44.
Mayne, D., Rawlings, J., Rao, C. & Scokaert, P. (2000), ‘Constrained modelpredictive control: Stability and optimality’, Automatica 36, 789–814.
McCulloch, A. & Lindley, A. (2007), ‘Global emissions of hfc-23 estimated to year2015’, Atmospheric Environment 41, 1560–1566.
Meaburn, A. & Hughes, F. (1996), ‘Feedforward control of solar thermal powerplants’, J. Solar Energy Engineering .

214 BIBLIOGRAFIA
Megıas, D., Serrano, J. & Prada, C. D. (2001), ‘Min-max constrained infinite ho-rizon model predictive control: standar vs feedback formulations’, EuropeanControl Conf. ecc-01 pp. 3765–3770.
Milito, R., Padilla, C., Padilla, R. & Cadorin, D. (1982), ‘An innovations approachto dual control’, IEEE Trans. Autom. Control AC-27, 132–137.
Morari, M. (2005), ‘Controlling hybrid systems - from theory to applications’,Ruperto Carola Symposium .
Morari, M. & Lee, J. (1999), ‘Model predictive control: Past, present and future’,Computers and Chemical Engineering 23, 667–682.
Mosca, E. (1995a), ‘Optimal, predictive and adaptive control’, Pretince-Hall In-formation and System Sciences Series .
Mosca, E. (1995b), Optimal, Predictive and Adaptive Control, Prentice Hall.
Muske, K. & Rawlings, J. (1993), ‘Model predictive control with linear models’,aiche Journal 39(2), 262–287.
Nasser, A. & Osman, T. (1984), ‘Simple libr/water absorption cycle limitations’,Applied Energy 17, 251–262.
Nikolaou, M. (1998), ‘A critical synthesis of theory and industrial needs’, Advan-ces in Chemical Engineering Series .
Normey, J. & Camacho, E. (1999), ‘Robustness effects of a prefilter in a smith pre-dictor based generalized predictive controller’, IEE Proceedings on ControlTheory Applications 146(2), 179–185.
Nunez-Reyes, A. & Bordons, C. (2003), ‘Optimization of olive oil production bymeans of model predictive control’, II International Workshop InformationTechnologies and Computing Techniques for the Agro-food Sector .
Nunez-Reyes, A. & Bordons, C. (2005), ‘Predictive control of a solar air con-ditioning plant with simultaneous identification’, 44th IEEE Conference onDecision and Control and European Control Conference CDC-ECC’05 .
Nunez-Reyes, A., Cueli, J. & Bordons, C. (2001), ‘Modelado y control de unaalmazara de extraccion de aceite de oliva’, XXII Jornadas de Automatica .
Nunez-Reyes, A., Normey-Rico, J., Bordons, C. & Camacho, E. (2005), ‘A smithpredictive based mpc in a solar air conditioning plant’, Journal of Processcontrol 15/1, 1–10.

BIBLIOGRAFIA 215
Nunez-Reyes, A. & Payseo-Dıaz, R. (2003), ‘Desarrollo e integracion de herra-mientas de simulacion y control vıa opc’, XXIV Jornadas de Automatica.
Nunez-Reyes, A., Scheffer-Dutra, C. & Bordons, C. (2002a), ‘Comparison of dif-ferent predictive controllers with multi-objective optimization. applicationto an olive oil mill’, Proc.IEEE International Conference on Control Appli-cations and International Smposium on Computer Aided Control SystemsDesigns CCA-CACSD’02 .
Nunez-Reyes, A., Scheffer-Dutra, C. & Bordons, C. (2002b), ‘Controle preditivocom restricoes aplicado a uma planta solar de climatizacao’, XIV CongressoBrasileiro de Automatica. CBA’02 .
Nunez-Reyes, A., Scheffer-Dutra, C. & Bordons, C. (2002c), ‘Predictive control ofan olive oil mill with multi-objective prioritization’, Proc. of the 15th Trien-nial World Congress of the International Federation of Automatic ControlIFAC’02 .
Nunez-Reyes, A. & Zafra-Cabeza, A. (2001), ‘Monitorizacion, control y simulacionen tiempo real de una planta piloto mediante el sistema experto g2’, XXIIJornadas de Automatica .
Ollero, P. & Camacho, E. F. (1997), Control e instrumentacion de procesos quımi-cos, Editorial Sıntesis, S.A., Madrid.
Onnen, C., Balbuska, R., Kaymak, U., Sousa, J. M. & Verbruggen, H. (1997), ‘Ge-netic algorithms for optimization in predictive control’, Control EngineeringPractice 5(10), 1363–1372.
Orbach, A., Rorres, C. & Fischl, R. (1981), ‘Optimal control of a solar collectorloop using a distributed-lumped model’, Automatica 27(3), 535–539.
Ordys, A. & Clarke, D. (1993), ‘A state-space description for gpc controllers’,Int. J. Systems Sci. 24, 1727–1744.
Ortega, J. G. & Camacho, E. (1996), ‘Mobile robot navigation in a partiallystructured environment using neural predictive control’, Control EngineeringPractice 4, 1669.
Papadopoulos, A., Oxizidis, S. & Kyriakis, N. (2003), ‘Perspectives of solar coo-ling in view of the developments in the air-conditioning sector’, Renew Sus-tain Energy Rev 7, 419–438.
Parlamento Europeo (2000), ‘Reglement (ce) n 2037/2000 du parlement europeenet du conseil du 29 juin 2000 relatif a des substances qui appauvrisent lacouche de ozone’.

216 BIBLIOGRAFIA
Patel, V. & Mansoori, G. A. (1979), ‘Thermodynamics basics for the choice ofworking fluids for solar absorption cooling systems’, Solar Energy .
Perez, A. (1995), Aplicacion de tecnicas de programacion dinnamica a control pre-dictivo basado en modelos, PhD thesis, Universidad Nacional de Eduacaiona Distancia.Facultad de Ciencias.
Peterka, V. (1984), ‘Predictor-based self-tuning control’, Automatica 20(1), 39–50.
Pilatowsky, I., Best, R., Gutierrez, F. & J.I.G.Hernandez (1993), ‘Metodos deproduccion de frıo’, UNAM .
Prett, D. & Morari, M. (1987), ‘The shell process control workshop. process con-trol research: Industrial and academic perspectives’, Butterworths pp. 355–360.
Primbs, J., Nevistic, V. & Doyle, J. (2000), ‘A receding horizon generalization ofpointwise min-norm controllers’, ieee Transactions on Automatic Control45, 898–909.
Propoi, A. (1963), ‘Use of lp methods for synthesizing sampled-data automaticsystems’, Automatic Remote Control .
Qin, S. & Badgwell, T. (1997), ‘An overview of industrial model predictive controltechnology’, J.C. Kantor, C.E. Garcıa y B. Carnahan (Editores) tth Int.Conf. on Chemical Process Control tomo 93, 232–256.
Qin, S. & Badgwell, T. (2003), ‘A survey of industrial model predictive controltechnology’, Control Engineering Practice 11, 733–764.
Qin, S. & Lee, J. (2001), ‘Overview of industrial model predictive control’, LectureNotes Taiwan mpc Workshop .
Ramırez, D. & Camacho, E. (2002), Characterization of Min-Max MPC withglobal uncertainties, in ‘Proc. American Control Conference, ACC’.
Rawlings, J., Meadows, E. & Muske, K. (1994), ‘Nonlinear model predictive con-trol: A tutorial and survey’, Proc. Int. Symp. Adv. Control of Chemical Pro-cesses (adchem) .
Rawlings, J. & Muske, K. (1993), ‘Industrial applications of model based predic-tive control’, Automatica 29(5), 1251–1274.
Richalet, J. (1993), ‘Industrial applications of model based predictive control’,Automatica 29(5), 1251–1274.

BIBLIOGRAFIA 217
Richalet, J., Ata-Doss, S., Arber, C., Kuntze, H., Jacubash, A. & Schill, W.(1987), ‘Predictive functional control. application to fast and accurate ro-bots’, Proc. 10th IFAC Congress .
Richalet, J., Rault, A., Testud, J. & Papon, J. (1978), ‘Model predictive heuristiccontrol: Application to industrial processes’, Automatica 14(2), 413–428.
Rodriguez, F., Guzman, J., Berenguel, M. & Arahal, M. (In press 2007), ‘Adaptivehierarchical control of greenhouse crop production’, International Journal ofAdaptive Control and Signal Processing .
Rorres, C., Orbach, A. & Fischl, R. (1980), ‘Optimal and suboptimal control po-licies for a solar collector system’, IEEE Trans. Automatic Control 25, 1085–1091.
Rossiter, J., Kouvaritakis, B. & Dunnett, R. (1991), ‘Application of generalizedpredictive control to a boiler turbine unit for electricity generation’, ieeProceedings-D 138, 59–67.
Rubio, F., Camacho, E. & Berenguel, M. (2006), ‘Control de campos de colecto-res solares’, Revista Iberoamericana de Automatica e Informatica Industrial:RIAI 3(4), 26–45.
Ruız, V. (2006), El reto energetico. Opciones de futuro para la energıa, EditorialAlmuzara.
Ruız, V. & Gomez, C. (1982), ‘Centrales electricas termosolares. energıas reno-vables y medio ambiente’, Ed. Centro de Ordenacion del Territorio y MedioAmbiente del Ministerio de Obras Publicas y Urbanismo .
Salcedo, J., Martınez, M., Ramos, C. & Herrero, J. (2006), ‘Predictive lpv controlof a liquid-gas separation process’, Advances in Engineering Software .
S.Aphornratana & Eames, I. (1995), ‘Thermodynamic analysis of absorption re-frigeration cycles using the second law of thermodynamics method’, Inter-national Journal of refrigeration 18, 244–252.
Sheridan, N. & Grassie, S. (1977), ‘Modeling of a solar operated absorption airconditioner system with refrigerant storage’, Solar Energy .
Shouche, M., Genceli, H. & Nikolaou, M. (2002), ‘Effect of on-line optimization te-chniques on model predictive control and identification (MPCI)’, 23/2, 137–160.
Shouche, M., Genceli, H., Vuthandam, P. & Nikolaou, M. (1998), ‘Simultaneousconstrained model predictive control and identification of darx processes’,34, 1521–1530.

218 BIBLIOGRAFIA
Silva, R., Filatov, N., Lemos, J. & Unbehauen, H. (1998), ‘Feedback/feedforwarddual adaptive control of a solar collector field’, Proc. of the IEEE Int. Conf.on Control Applications 1, 309–313.
Stocker, W. & Reed, L. (1971), ‘Effect of operating temperatures on the co-efficient of performance of aquaammonia refrigerating systems’, ASHRAETransactions 77, 163–170.
Tsang, T. & Clarke, D. (1988), ‘En d.w. clarke (editor) generalized predictivecontrol with input constraints’, ieee Proceedings 135, 451–460.
Tsoutsos, T., Anagnostou, J., Pritchard, C., Karagiorgas, M. & Agoris, D. (2003),‘Solar cooling technologies in greece-an economic viability analysis’, Appl.Thermal Eng. 23, 14271439.
United Nations (1992), ‘Rio declaration on environment and development’,http://www.un.org/documents/ga/conf151/aconf15126-1annex1.htm .
United Nations (1997), ‘Kyoto protocol to the united nations framework conven-tion on climate change’, http://www.un.org/millennium/law/xxvii-23.htm .
Valenzuela, L. & Balsa, P. (1998), ‘Series and parallel feedforward control sche-mes to regulate the operation of a solar collector field’, In Martınez, D.(Ed.), Proc. of the 2nd users Workshop. TMR Programme at PSA, CIE-MAT pp. 19–24.
Ward, D., Weiss, T. & Lof, G. (1976), ‘Preliminary performance of csu solar housei: heating and cooling system’, Solar Energy pp. 1572–1580.
Ward, S. (1979), ‘Solar absorption cooling feasibility’, Solar Energy .
Wittenmark, B. (1975), ‘Stochastic adaptive control method: a survey’, Int. J.Control 21, 705–730.
Wu, C. (1995), ‘Maximum obtainable specific cooling load of a refrigerator’,Energy Conver. Mgmnt. 36(1), 7–10.
Xu, S., Zhang, L., Xu, C., Liang, J. & Du, R. (2007), ‘Numerical simulation of anadvanced energy storage system using h2olibr as working fluid, part 1: Sys-tem design and modeling’, International Journal of Refrigeration 30(2), 354–363.
Yan, Z. & Chen, J. (1992), ‘Optimal performance of irreversible carnot heatpump’, Int. J. Energy-Enviroment-Economics 2(1), 63–66.
Yazaki (n.d.), ‘Especificaciones tecnicas’, http://www.absorsistem .

BIBLIOGRAFIA 219
Ydstie, B. (1984), ‘Extended horizon adaptive control’, Proc. 9th IFAC WorldCongress .
Zafra-Cabeza, A. & Nunez-Reyes, A. (2001), ‘Supervision, monotorizacion y con-trol de planta piloto mediante scada’, XXII Jornadas de Automatica .
Zheng, A. & Morari, M. (1995), ‘Stability of model predictive control with mixedconstraints’, ieee Trans. on Automatic Control 40(10), 1818–1823.