Esquemas de Control PID
29
ESQUEMAS DE CONTROL PID Daniela Araya León Jorge Rojas Meza Julio Viveros Hernandez
Transcript of Esquemas de Control PID

ESQUEMAS DE CONTROL
PIDDaniela Araya León
Jorge Rojas Meza
Julio Viveros Hernandez
AGENDA
• Definición de Controlador PID
• Ventajas
• Respuestas al escalón con controladores PI, PD y PID
• Reglas de Sintonía Zieger-Nichols
• Método de Respuesta en Frecuencia
• Método de Optimización Computacional
• Controles PID Modificados
• Referencias

¿QUÉ ES UN CONTROLADOR PID?
𝐺𝑐 𝑠 = 𝐾𝑝 +𝐾𝑖𝑠+ 𝐾𝑑𝑠
VENTAJAS DE UN CONTROLADOR PID
1. Mejora el amortiguamiento, reduce sobrepaso máximo (PD)
2. Mejora la estabilidad, disminuye el tiempo de asentamiento (PI)
3. Mejora el error en estado estable (PI)
Sin embargo:
1. Tiempo de levantamiento incrementa (PI)

RESPUESTAS AL
ESCALÓN CON
CONTROLADORES
PI, PD Y PID

REGLAS ZIEGLER- NICHOLS PARA LA
SINTONÍA DE CONTROLADORES PID
• Plantas cuya complejidad no permiten un análisis analítico(matemático) y por lo tanto tampoco un diseño analítico.
• Sintonía = selección de parámetros.
• Reglas de Zieger- Nichols.

REGLAS ZIEGLER- NICHOLS PARA LA
SINTONÍA DE CONTROLADORES PID
• Obtener valores a partir de respuestas escalón experimentales.
• Kp que resulte en estabilidad marginal.
Kp: Ganancia
proporcional
Ti: Tiempo Integral
Td: Tiempo derivativo
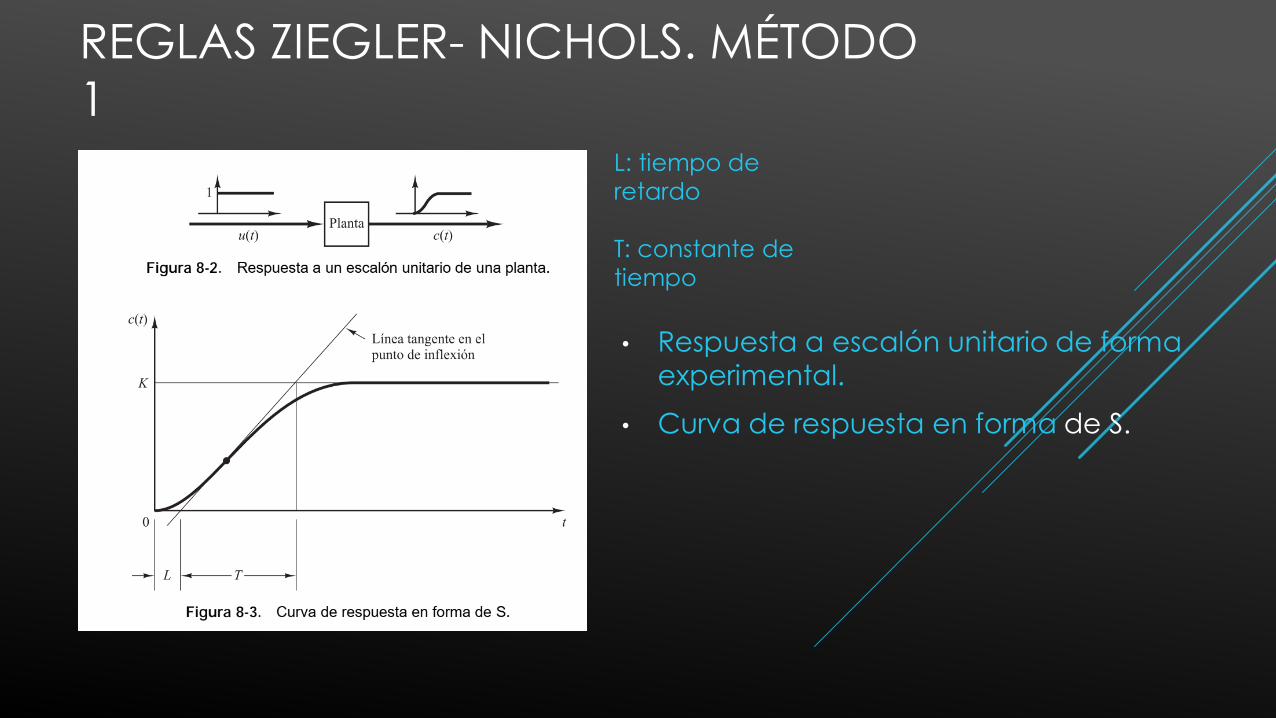
REGLAS ZIEGLER- NICHOLS. MÉTODO
1
• Respuesta a escalón unitario de forma experimental.
• Curva de respuesta en forma de S.
L: tiempo de
retardo
T: constante de
tiempo
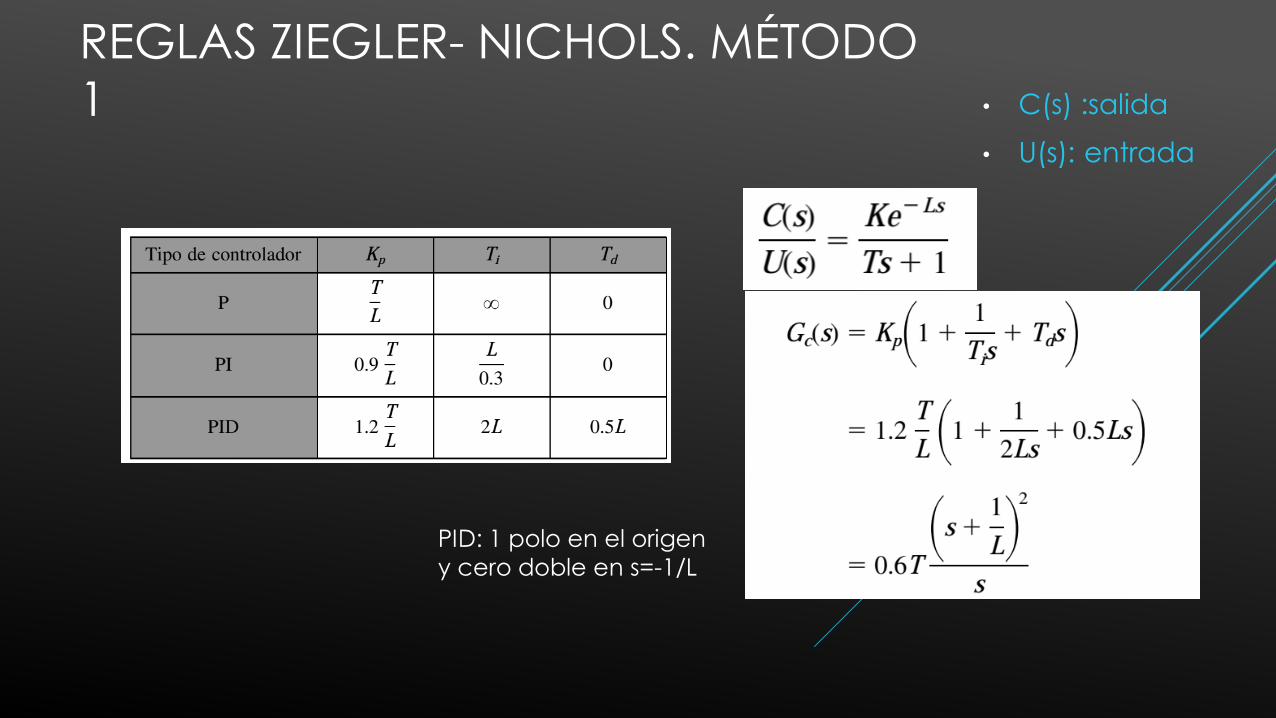
REGLAS ZIEGLER- NICHOLS. MÉTODO
1 • C(s) :salida
• U(s): entrada
PID: 1 polo en el origen
y cero doble en s=-1/L

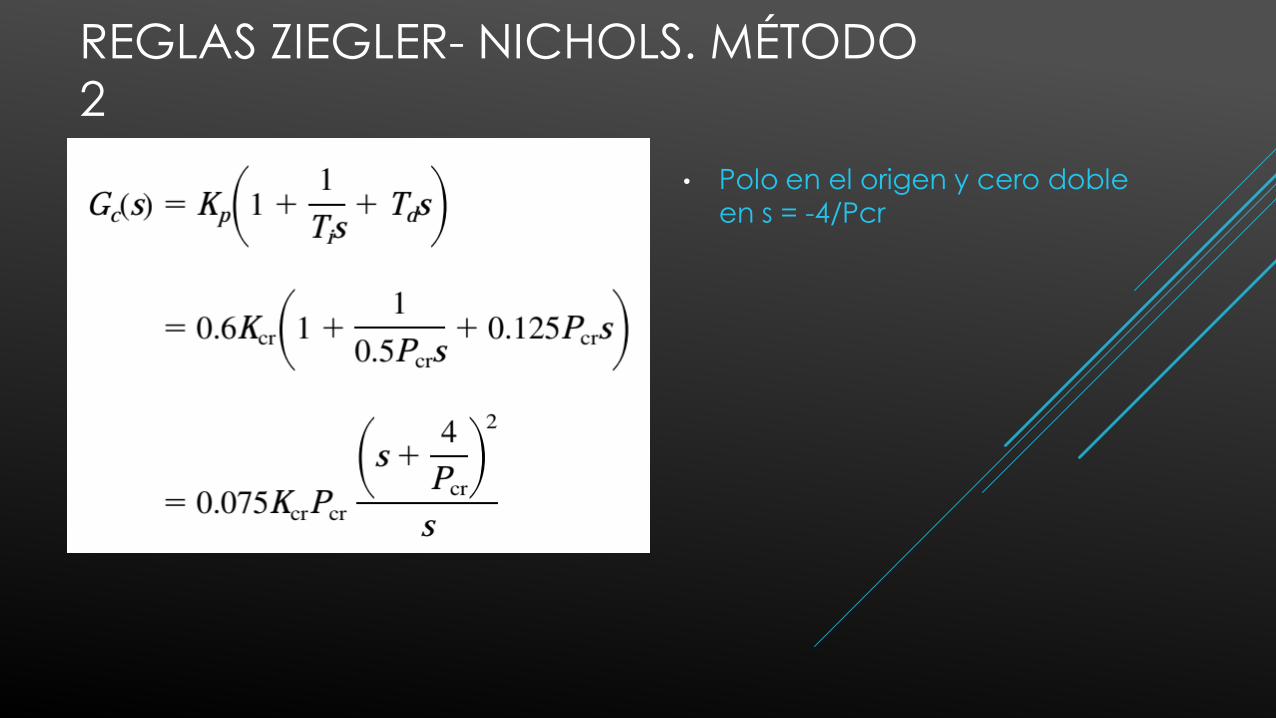
REGLAS ZIEGLER- NICHOLS. MÉTODO
2
Kcr: Ganancia
Crítica
Pcr: Periodo
Crítico
Fijar Ti en infinito.
Td en 0.
Aumentar Kp desde
0 hasta Kcr ->
oscilaciones
sostenidas
REGLAS ZIEGLER- NICHOLS. MÉTODO
2
• Polo en el origen y cero dobleen s = -4/Pcr
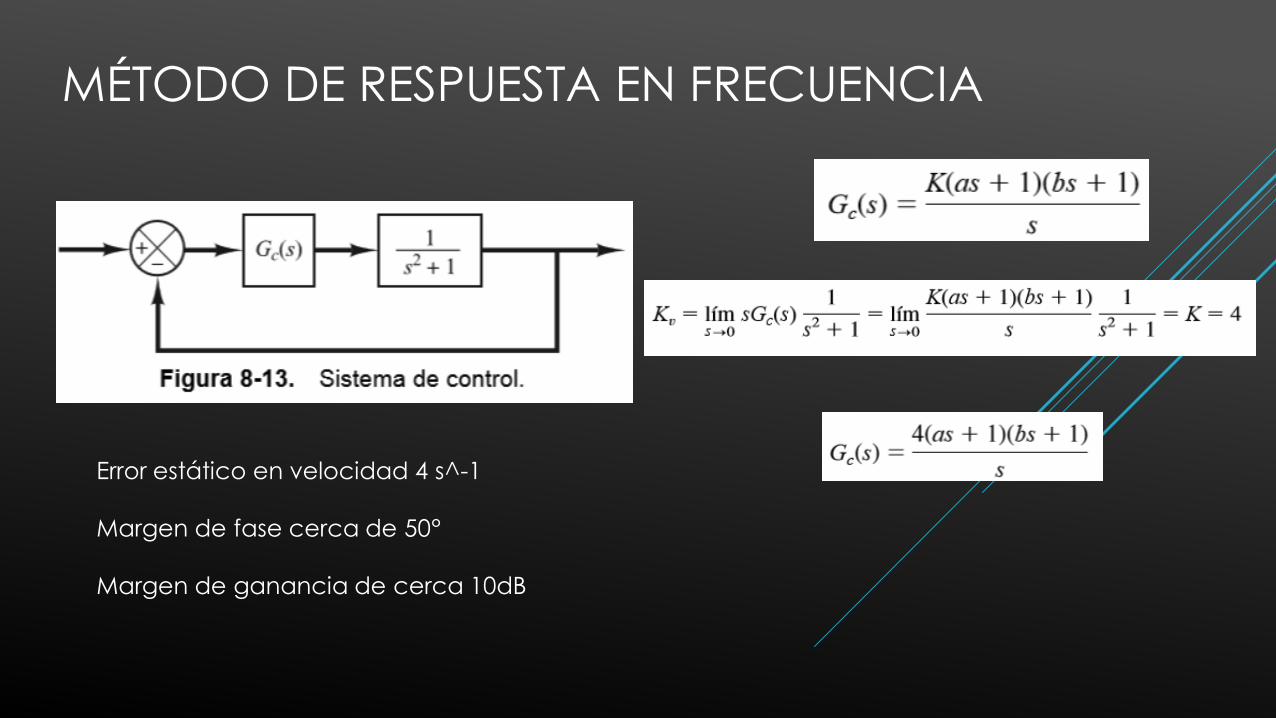
MÉTODO DE RESPUESTA EN FRECUENCIA
Error estático en velocidad 4 s^-1
Margen de fase cerca de 50°
Margen de ganancia de cerca 10dB
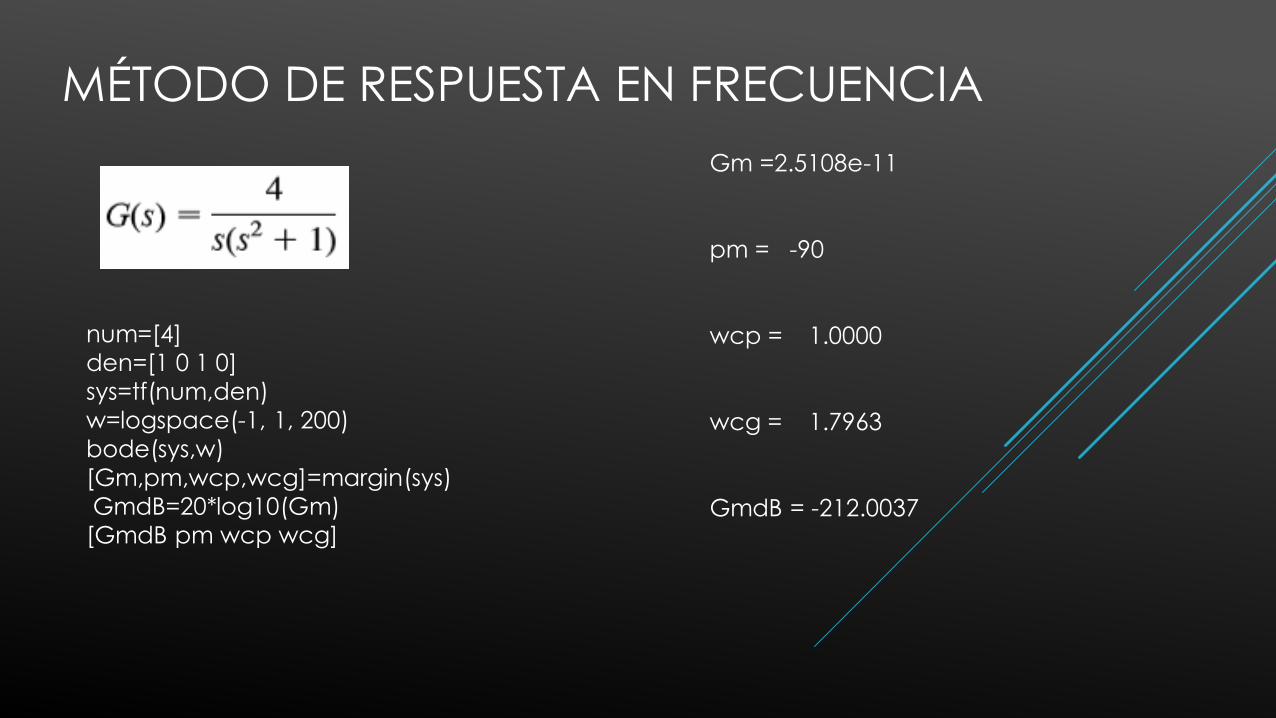
MÉTODO DE RESPUESTA EN FRECUENCIA
num=[4]
den=[1 0 1 0]
sys=tf(num,den)
w=logspace(-1, 1, 200)
bode(sys,w)
[Gm,pm,wcp,wcg]=margin(sys)
GmdB=20*log10(Gm)
[GmdB pm wcp wcg]
Gm =2.5108e-11
pm = -90
wcp = 1.0000
wcg = 1.7963
GmdB = -212.0037

MÉTODO DE RESPUESTA EN FRECUENCIA

MÉTODO DE RESPUESTA EN FRECUENCIA
Gm = 4.9068e-06
pm = -2.4979
wcp = 1.0001
wcg = 4.5847
GmdB = -106.1840
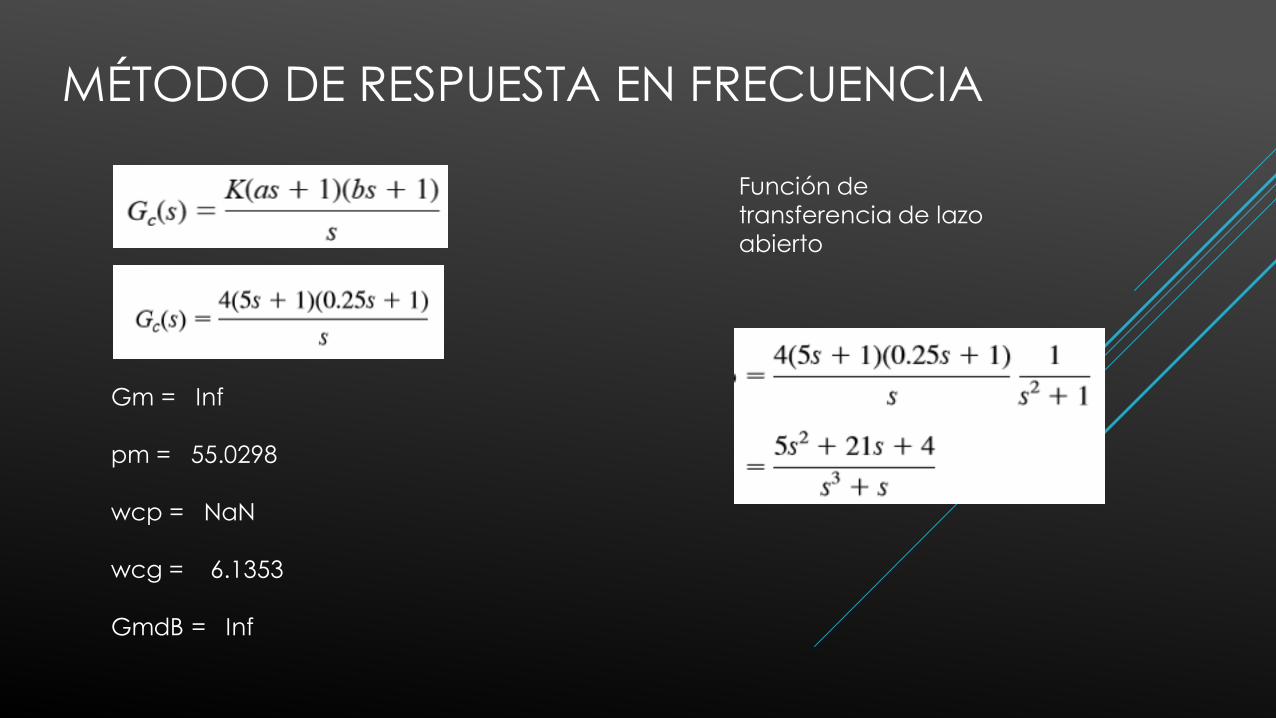
MÉTODO DE RESPUESTA EN FRECUENCIA
Gm = Inf
pm = 55.0298
wcp = NaN
wcg = 6.1353
GmdB = Inf
Función de
transferencia de lazo
abierto

MÉTODO DE RESPUESTA EN FRECUENCIA
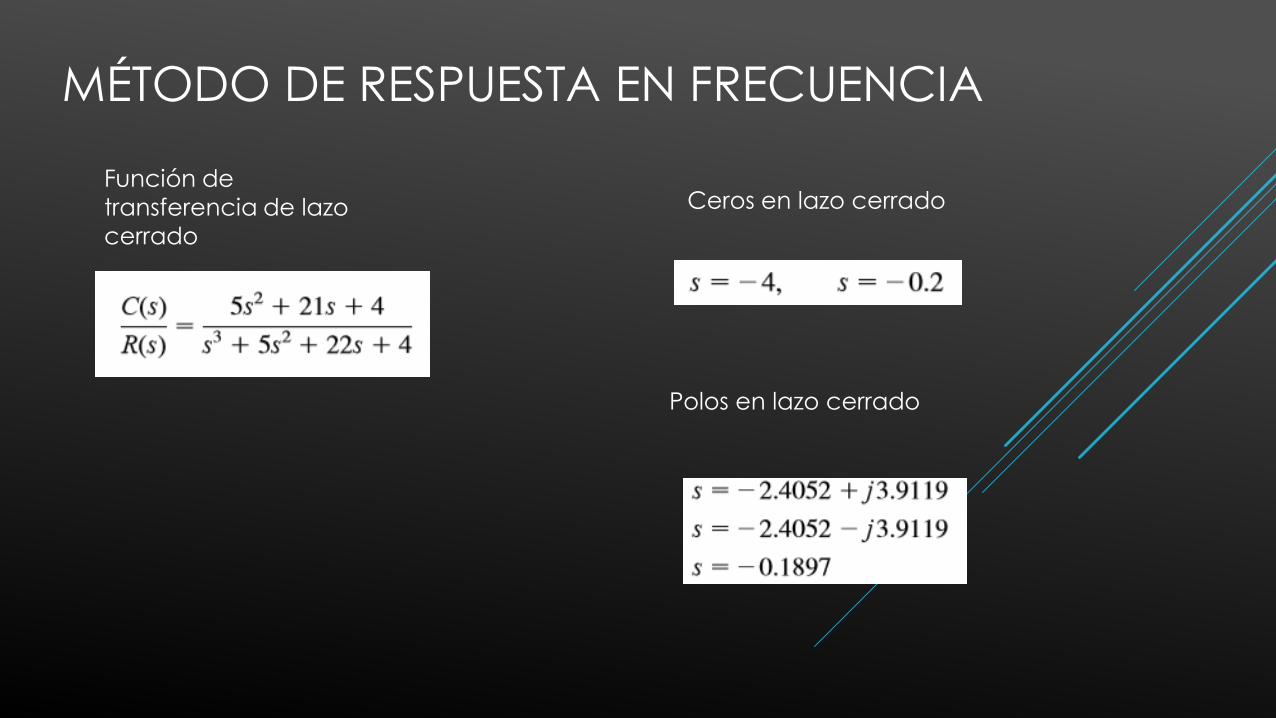
MÉTODO DE RESPUESTA EN FRECUENCIA
Función de
transferencia de lazo
cerrado
Ceros en lazo cerrado
Polos en lazo cerrado
MÉTODO DE RESPUESTA EN FRECUENCIA
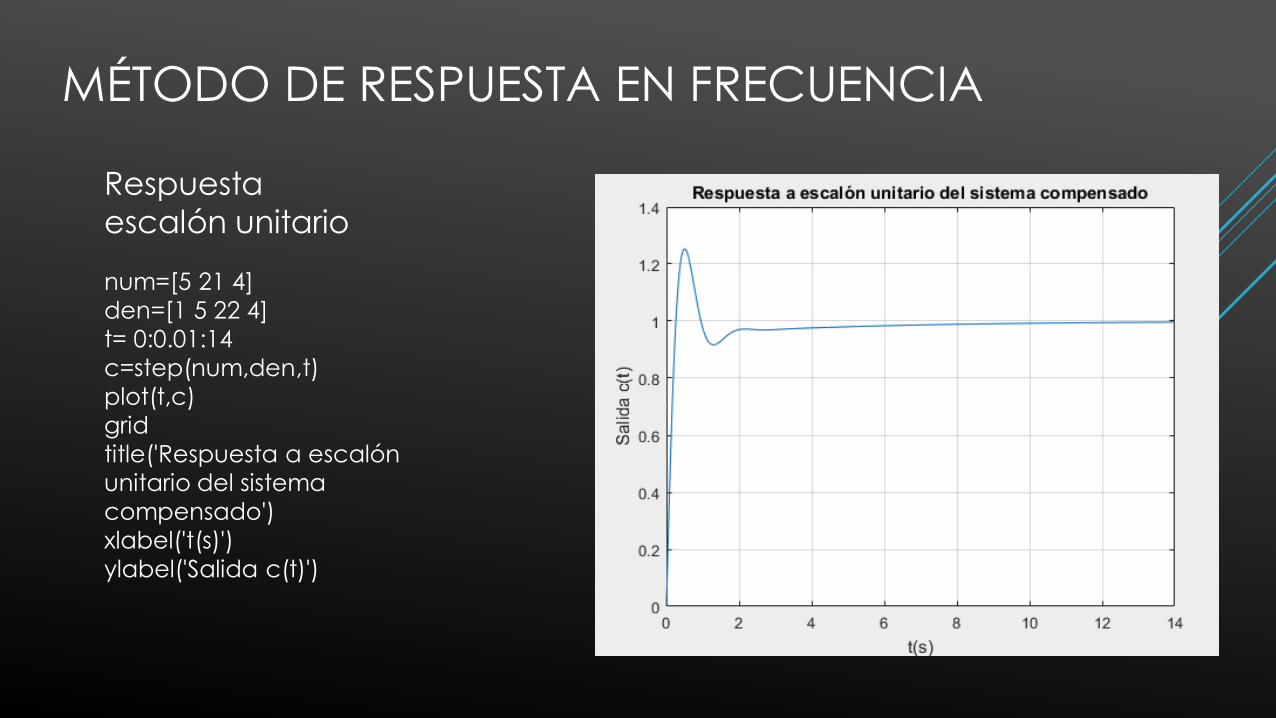
Respuesta
escalón unitario
num=[5 21 4]
den=[1 5 22 4]
t= 0:0.01:14
c=step(num,den,t)
plot(t,c)
grid
title('Respuesta a escalón
unitario del sistema
compensado')
xlabel('t(s)')
ylabel('Salida c(t)')
MÉTODO DE RESPUESTA EN FRECUENCIA
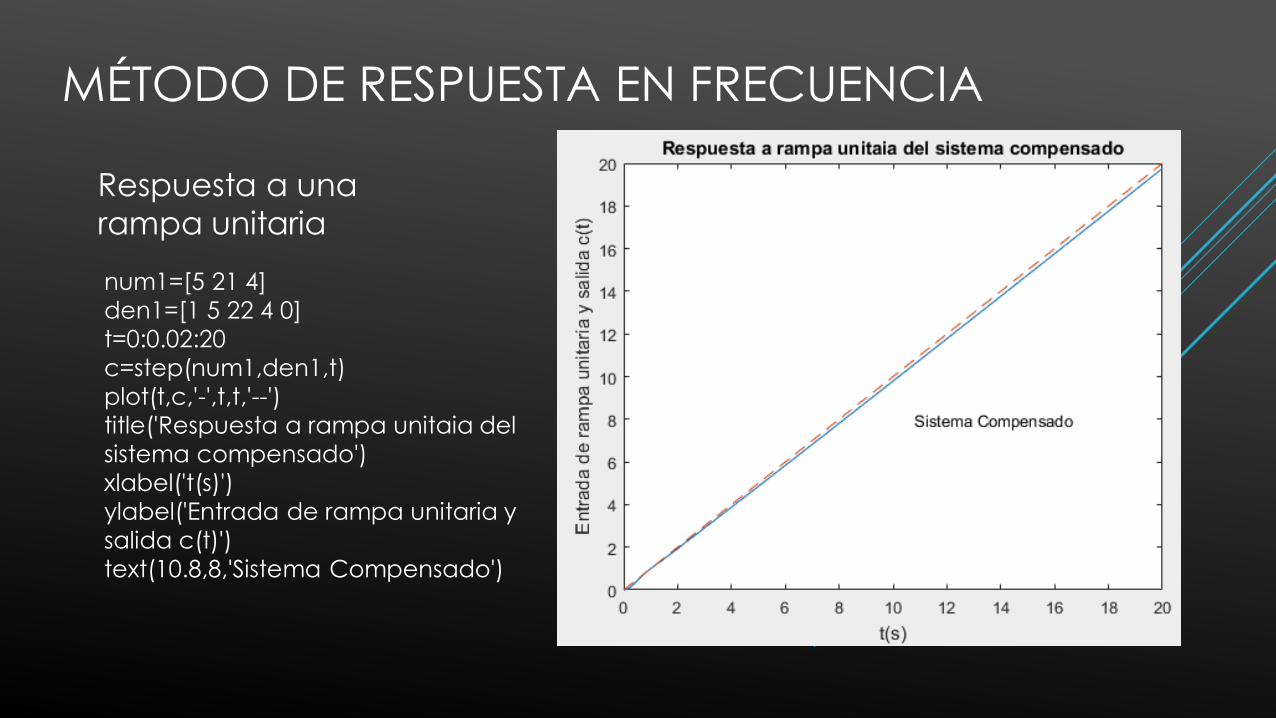
Respuesta a una
rampa unitaria
num1=[5 21 4]
den1=[1 5 22 4 0]
t=0:0.02:20
c=step(num1,den1,t)
plot(t,c,'-',t,t,'--')
title('Respuesta a rampa unitaia del
sistema compensado')
xlabel('t(s)')
ylabel('Entrada de rampa unitaria y
salida c(t)')
text(10.8,8,'Sistema Compensado')

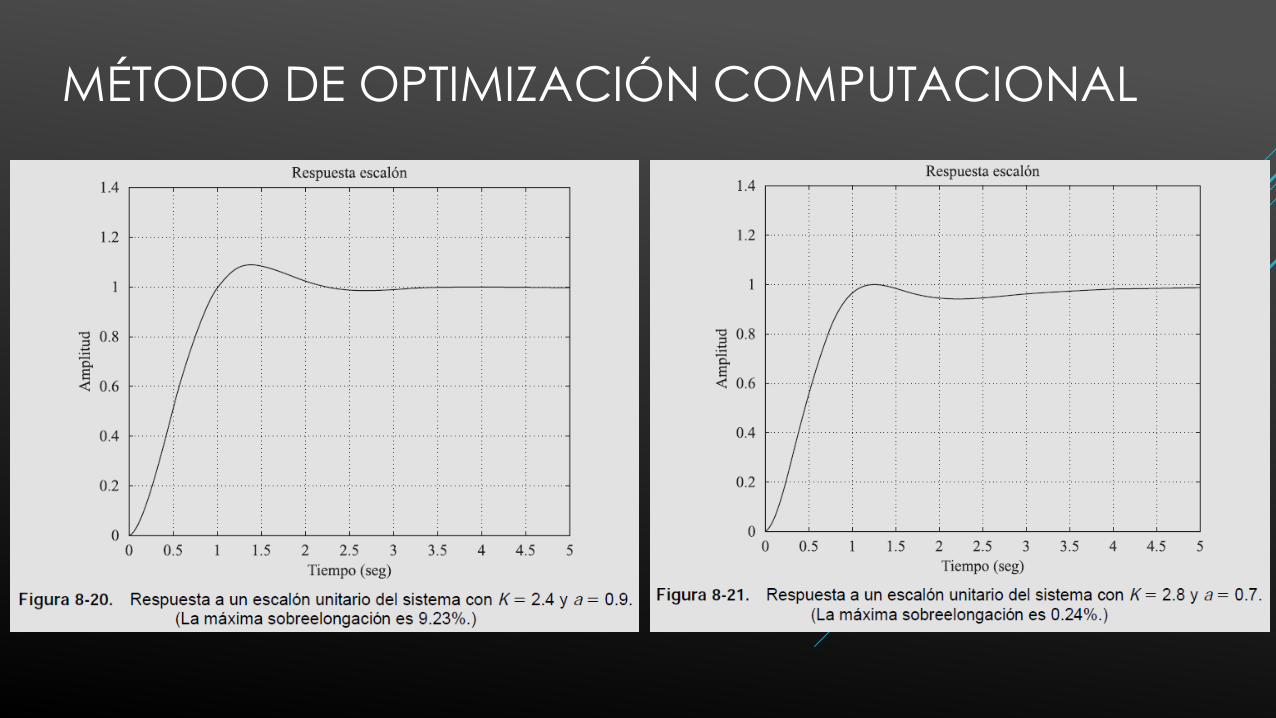
MÉTODO DE OPTIMIZACIÓN COMPUTACIONAL
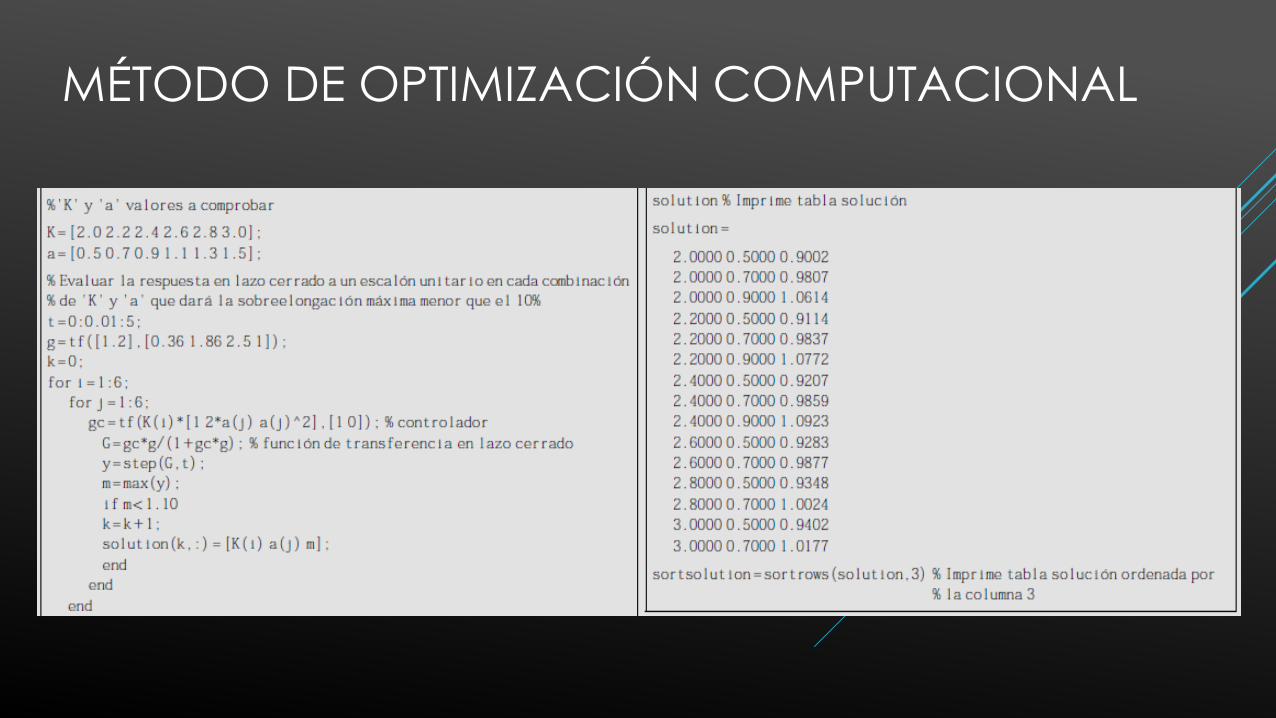
Obtener un conjunto óptimo de valores de parámetros que satisfagan la
especificación de respuesta transitoria mediante el uso de MATLAB.
Ejemplo:
Valores de K y a para que el sistema sea:
• Sobreamortiguado
• Sobreelongación <10% (Respuesta escalón unitario)
Pasos a seguir:
1. Suponer región de valores: 2 ≤ K ≤ 3 y 0.5 ≤ a ≤ 1.5.
2. Determinar el tamaño del paso de cálculo para K y a. En este caso es de 0.2 para ambas variables.
MÉTODO DE OPTIMIZACIÓN COMPUTACIONAL
MÉTODO DE OPTIMIZACIÓN COMPUTACIONAL

MÉTODO DE OPTIMIZACIÓN COMPUTACIONAL
MÉTODO DE OPTIMIZACIÓN COMPUTACIONAL
MÉTODO DE OPTIMIZACIÓN COMPUTACIONAL
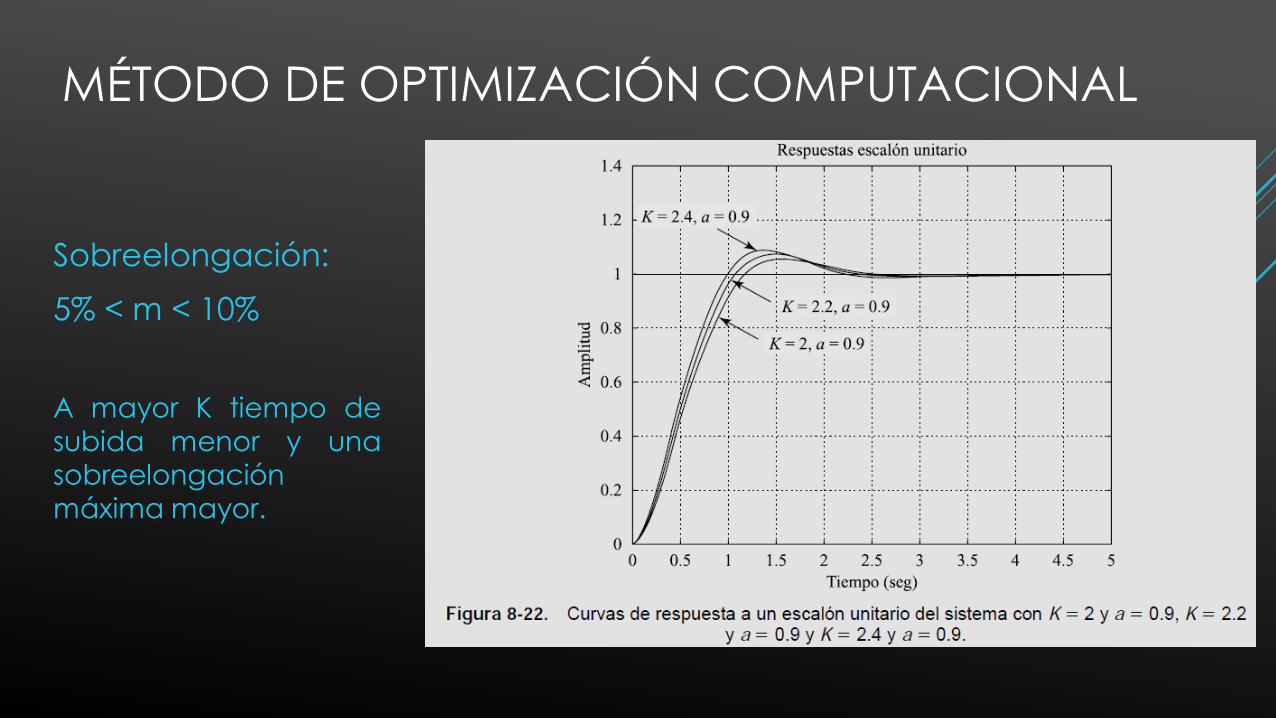
Sobreelongación:
5% < m < 10%
A mayor K tiempo desubida menor y unasobreelongaciónmáxima mayor.

MÉTODO DE OPTIMIZACIÓN COMPUTACIONAL
Sobreelongación: 10% < m < 15%
Tiempo de asentamiento ts < 3 seg

MODIFICACIONES DE LOS ESQUEMAS DE CONTROL PID
Patada en el punto de consigna.
• PI-D
• I-PD
• PID con dos grados de libertad
• Asignación de Ceros para mejorar las
características de respuesta

REFERENCIAS
Ogata, K. (2010). Ingeniería de Control Moderna. Pearson Educación S.A. Madrid. Capítulo 8. pp
Kuo, B. (1996). Sistemas de Control Automático. Prentice Hall. México. Ed. 7.