Laboratorio Control Pid
5
Click here to load reader
-
Upload
juan-carlos-carmen-solano -
Category
Documents
-
view
7 -
download
0
description
Laboratorio Control Pid con labview
Transcript of Laboratorio Control Pid
Primero se utiliz un bucle While para que le programa siempre se encuentre corriendo, de forma que tengamos el control de su funcionamiento (pudiendo desactivarlo cuando nosotros queramos)
Creamos su control:
A continuacin se considerarn las entradas de lectura de sensor (realimentacin) y de valor de referencia (Set Point). Para ello utilizamos un control numrico para el ltimo y un Dial para el primero. La deferencia de estos me dar el error:
Como primer paso para implementar el control PID comenzamos por el proporcional, que ser proporcional al error, es decir, que es la multiplicacin de una constante por el error:
Esto me arroja como resultado la variable controlada. Colocamos indicadores numricos para observar su magnitud, como un Horizontal Pointer Slider y Waveform Chart, ste ltimo para obtener el conjunto de valores (datos) de nuestra variable en forma de grfico.
Podemos hacer la seal representada numricamente sea de un motor, indicador su velocidad o alguna otra magnitud de nuestro inters. Debemos utilizar el elemento denominado Bundle para nuestra grfica , de forma que me arroje las entradas de Set Point y de variable controlada en una sola grfica. As:
Finalmente agregamos un reloj con un tiempo de 25 ms (funcin espera) y as tenemos:
Continuando con el control PID, implementamos un control PI (proporcional integral). Como sabemos el control integral es la multiplicacin del error por una constante Ki (constante integral); para el caso de PI, se suma con el proporcional, as tenemos:
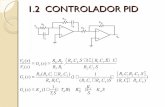
Luego, Utilizamos la paleta de Control PID para nuestro ejemplo.Para ello se selecciona el bloque PID ADVANCED, el cual me permite crear un control PID. Posee entradas para el Set Point y la variable de proceso (que en nuestro estar determinada por el sensor).
Adems de poseer otra entrada para las respectivas ganancias del control PID. Para ello creamos un control que denominaremos PID GAINS, en el cual podemos introducir fcilmente el valor de nuestras constantes proporcionales, derivativas e integrales. Agregamos tambin una grfica para observar el comportamiento de nuestra variable y tambin un Bundle para compararla con la entrada.