CONTROLADOR DE TORQUE DFOC PARA MOTORES DE · PDF filede las universidades nacionales y, ......
16
CONTROLADOR DE TORQUE DFOC PARA MOTORES DE INDUCCIÓN UTILIZANDO REDES NEURONALES CON UN SISTEMA HÍBRIDO FPGADSP FABRICADO EN EL PERÚ Víctor Sotelo Neyra
Transcript of CONTROLADOR DE TORQUE DFOC PARA MOTORES DE · PDF filede las universidades nacionales y, ......

CONTROLADOR DE TORQUE DFOC PARA MOTORES DE INDUCCIÓN UTILIZANDO REDES NEURONALES CON UN SISTEMA HÍBRIDO FPGADSP FABRICADO EN EL
PERÚ
Víctor Sotelo Neyra

CONTROLADOR DE TORQUE DFOC
PARA MOTORES DE INDUCCIÓN
UTILIZANDO REDES NEURONALES
CON UN SISTEMA HÍBRIDO FPGADSP
FABRICADO EN EL PERÚ
Primera edición digital
Julio, 2011
Lima - Perú
© Víctor Sotelo Neyra
PROYECTO LIBRO DIGITAL
PLD 0164
Editor: Víctor López Guzmán
http://www.guzlop-editoras.com/[email protected] [email protected] facebook.com/guzlop twitter.com/guzlopster428 4071 - 999 921 348Lima - Perú
PROYECTO LIBRO DIGITAL (PLD)
El proyecto libro digital propone que los apuntes de clases, las tesis y los avances en investigación (papers) de las profesoras y profesores de las universidades peruanas sean convertidos en libro digital y difundidos por internet en forma gratuita a través de nuestra página web. Los recursos económicos disponibles para este proyecto provienen de las utilidades nuestras por los trabajos de edición y publicación a terceros, por lo tanto, son limitados.
Un libro digital, también conocido como e-book, eBook, ecolibro o libro electrónico, es una versión electrónica de la digitalización y diagramación de un libro que originariamente es editado para ser impreso en papel y que puede encontrarse en internet o en CD-ROM. Por, lo tanto, no reemplaza al libro impreso.
Entre las ventajas del libro digital se tienen:• su accesibilidad (se puede leer en cualquier parte que tenga electricidad),• su difusión globalizada (mediante internet nos da una gran independencia geográfica),• su incorporación a la carrera tecnológica y la posibilidad de disminuir la brecha digital (inseparable de la competición por la influencia cultural),• su aprovechamiento a los cambios de hábitos de los estudiantes asociados al internet y a las redes sociales (siendo la oportunidad de difundir, de una forma diferente, el conocimiento),• su realización permitirá disminuir o anular la percepción de nuestras élites políticas frente a la supuesta incompetencia de nuestras profesoras y profesores de producir libros, ponencias y trabajos de investiga-ción de alta calidad en los contenidos, y, que su existencia no está circunscrita solo a las letras.
Algunos objetivos que esperamos alcanzar:• Que el estudiante, como usuario final, tenga el curso que está llevando desarrollado como un libro (con todas las características de un libro impreso) en formato digital.• Que las profesoras y profesores actualicen la información dada a los estudiantes, mejorando sus contenidos, aplicaciones y ejemplos; pudiendo evaluar sus aportes y coherencia en los cursos que dicta.• Que las profesoras y profesores, y estudiantes logren una familiaridad con el uso de estas nuevas tecnologías.• El libro digital bien elaborado, permitirá dar un buen nivel de conocimientos a las alumnas y alumnos de las universidades nacionales y, especialmente, a los del interior del país donde la calidad de la educación actualmente es muy deficiente tanto por la infraestructura física como por el personal docente.• El pe r sona l docente jugará un r o l de tu to r, f ac i l i t ador y conductor de p r oyec tos
de investigación de las alumnas y alumnos tomando como base el libro digital y las direcciones electró-nicas recomendadas.• Que este proyecto ayude a las universidades nacionales en las acreditaciones internacionales y mejorar la sustentación de sus presupuestos anuales en el Congreso.
En el aspecto legal:• Las autoras o autores ceden sus derechos para esta edición digital, sin perder su autoría, permitiendo que su obra sea puesta en internet como descarga gratuita.• Las autoras o autores pueden hacer nuevas ediciones basadas o no en esta versión digital.
Lima - Perú, enero del 2011
“El conocimiento es útil solo si se difunde y aplica” Víctor López Guzmán Editor

Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
402
Nomenclatura
I CorrientesL InductanciasR ResistenciasV TensionesΨ FlujosB Densidad de campo magnéticoFmm Fuerza magnetomotrizFcem Fuerza contraelectromotrizH Intensidad de campo magnéticoJrl Momento de inercia totalt TiempoTem Par de torque electromagnético Tl Par de torque de la cargaϕ Posición angular en el estatorΨr,s Flujo de rotor o estatorθø Ángulo del vector de flujoθ r Posición angular del rotorωr Velocidad angular del rotorωeg Velocidad del eje giratorioRN Red Neuronal
1. Introducción
Los nuevos avances de la tecnología y el usode la microelectrónica en el área del control demotores, permite mejorar el desempeño y reducirsignificativamente los costos de fabricación. Todoslos equipos modernos cuentan hoy en día con lasupervisión de un microprocesador, con el fin demejorar la calidad de su desempeño, disminuir laspartes que los componen, aumentar la toleranciaa las fallas y disminuir los defectos o variacionesde parámetros producto del proceso de fabricación.Sin embargo el procesamiento de la informaciónes de forma secuencial, lo que podría limitar elcampo de acción a diferencia de los nuevoscontroladores basados en las redes neuronales,los cuales trabajan de forma paralela y son muchomas eficientes.
Las redes neuronales son excelentescontroladores adaptivos, trabajan de forma similar
Controlador de torque DFOC para motores de inducciónutilizando redes neuronales con un sistema híbrido FPGA-
DSP fabricado en el Perú
MSc. Víctor Sotelo NeyraUniversidad Nacional de Ingeniería
Instituto de Investigación de la Facultad de Ingeniería Industrial y de SistemasLima, Perú, L27
Resumen.- El presente trabajo trata sobre el diseño e implementación de uncontrolador de Torque y de flujo magnético para motores de inducción, basado enel uso de un sistema híbrido que cuenta con un procesador digital de señales DSPy un circuito digital programable FPGA.Las técnicas de Control aplicados son conocidas como «Control Directo de CampoOrientado» (DFOC) y «Estimación del flujo magnético por Redes Neuronales». Sebusca la orientación del campo con la estimación del flujo magnético del rotor, paralo cual utiliza una red neuronal programada en el FPGA.El campo orientado simplifica las ecuaciones del controlador de velocidad y dela corriente de campo. El DSP soluciona los algoritmos de control del campoorientado, gestiona el manejo del controlador, las señales de SVPWM del inversory la lectura de los sensores.En el trabajo de investigación se diseña y se fabrica un controlador del flujomagnético para que se adapte a los diferentes regimenes de operación, dado unTorque de referencia establecido que se requiera aplicar, para lo cual hace usode una red que estima el flujo del estator y otra que en base a variaciones de losparámetros aprende a obtener el flujo magnético del rotor. Ambas redes puedenser entrenadas con datos de un controlador FOC preestablecido, que tenga buendesempeño de forma experimental, de manera que se puedan manejar lascorrientes de referencia que son proporcionales a los flujos y torqueselectromagnéticos.
Palabras Clave.- Redes Neuronales, DSP, FPGA, controlador, campo orientado,motores, accionamiento, estimador de flujo.

Memorias - XVII CONIMERA
403
a como una persona evalúa las posibilidades deactuar, de acuerdo a las circunstancias oregímenes de trabajo del motor, adaptándose a lasnecesidades de carga y velocidad, e imprimiendolas corrientes necesarias para tener un sistemaestable.
La estimación de flujo magnético permiteeliminar los sensores mecánicos normalmenteusados en el control de los motores de inducción[1]. Se puede apreciar en los controladores quehacen uso de la técnica de campo orientado porcontrol indirecto, es decir que en la armadura noes necesaria la instalación de sensores de efectode campo para la medición del flujo [2]. Esto tienecomo principales ventajas un menor costo delaccionamiento y una mayor confiabilidad. Por estosmotivos, los accionamientos sin sensor de flujoson utilizados en la industria, pero solamente enaplicaciones donde no es necesaria la operaciónsostenida del motor a bajas velocidades.
2. Planteamiento del problema
En los motores de inducción, hay un bajodesempeño dinámico de los controladores sinsensores de flujo o torque a diferentes regimenesde carga y de velocidades, sobre todo a bajasvelocidades, eso se debe fundamentalmente, a quela mayoría de las estrategias de estimación sebasan en la información obtenida a partir de latensión de alimentación o de la lectura de corrientescon mucho ruido. La atenuación o pérdida de señal,cuando la máquina trabaja a muy baja velocidado carga variable, imposibilita el uso de estasestrategias.
3. Propuesta de solución
Se hace uso de una técnica moderna deredes neuronales, para hacer una estimación delflujo magnético, de manera que se puede realizarcorrecciones de la magnitud del flujo, cuando estepresenta no-linealidades o decaimiento por efectosde velocidad o voltaje. El campo orientado alsimplificar las ecuaciones permite el uso decontroladores de torque y de la corriente de campoque se manifiesta como el flujo magnético en elentrehierro, como si se tratara de un motor decorriente continua DC [3], los cuales utilizan elerror que existe entre el Torque o las corrientesde referencia que se deseen controlar, de formaque se pueda establecer la diferencia entre lasvariables de estado de un modelo y de la planta
para definir una función del torque real del rotor.El FPGA resuelve las ecuaciones de RN deestimación del flujo de manera rápida y en pocosciclos de reloj, de modo que disminuye la cargade procesamiento al DSP y le deja más tiempopara procesar otros algoritmos.
El DSP hace las lecturas de los voltajes,posición y corrientes del motor y entrega lainformación al FPGA mediante búferes de memoria,para que este resuelva la red neuronal aprendidacon anticipación por datos experimentales. Haydos redes que estiman los flujos, una primera queestima el flujo de estator y con los datos de salidaestos son entregados a otra red neuronal queestima los flujos de rotor. Luego el FPGA devuelveal DSP los datos estimados de flujo del rotor tantoen intensidad como en ángulo, necesarios parael control directo de torque.
4. Estimador neuronal
Uno de los estudios más antiguos y de mayorprofundidad en la historia, es el entendimiento decómo funciona el cerebro humano, estudiado desdehace muchos tiempo por filósofos, biólogos,psicólogos y neurólogos, hoy en día los resultadosde esos estudios son aprovechados pormatemáticos e ingenieros para solucionarproblemas de toda complejidad, incluso facilitandolos problemas de cálculo y mejorando lasvelocidades de respuesta.
Las redes neuronales que se utilizan en laingeniería, son un conjunto de ecuacionesmatemáticas que imitan el funcionamiento de unared neuronal humana, se trata de aprovechar elmodelo matemático descubierto en la forma deconexión de las neuronas, teniendo en cuenta queestas solucionan problemas como el de identificar,aprender, adaptarse, memorizar, discriminar,sintetizar, imaginar y abstraer .
Desde el punto de vista del procesamientodigital se trata de ecuaciones similares a las quesolucionan problemas de funciones detransferencia, es decir que pueden procesarsistemas lineales o no lineales, con retardo, conmemoria y retroalimentación.
Cuando la RN se encuentra trabajandoentonces los datos del flujo del rotor provienendirectamente de la red neuronal que esta entrenadapara trabajar de forma óptima con el motor. Sepuede establecer una comparación con los robots

Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
404
modernos de pintura para las fábricas de automóviles,donde son entrenados por pintores expertos, loscuales plasman su experiencia en las memoriasde los robots para dejar los mejores acabados.
Redes neuronales Recurrentes
Las redes neuronales recurrentes son muyimportantes cuando se trata de resolver problemasde ecuaciones diferenciales, en el mundo continuo,y ecuaciones diferencia en el tiempo discreto quees el caso cuando se trabaja con procesadoreso circuitos digitales basados en relojes. Las RNrecurrentes tienen como característica que algunasde las salidas pueden volver a formar parte de lasentradas, y en el caso en el que se requiera resolveruna función diferencia entonces la salida puedepasar por un retardo antes de convertirse en unade las entradas [3].
y(k)=F[y(k),y(k-1),..,y(k-m),x(k-1),..,x(k-n)](2)
En este tipo de modelo de RN se puedeobservar que se puede resolver fácilmente unaecuación diferencial o discreta, sin mayorcomplicación. En la siguiente figura se presentael modelo NARX paralelo, donde se puede ver eldiagrama simplificado de la red.
El algoritmo de apre ndizaje utilizado en elNARX es el de la herramienta matemática Matlab,la cual hace uso de técnicas de aproximacionesde propagación hacia atrás BPEA recurrentes.
Primera Red Neuronal NARX para laestimación del Flujo del Estator
Se plantea la estimación del flujo del estatorbasándose en las ecuaciones vectoriales deLeonhard [6]:
dtdtiRtV s
sssψ+= )(.)( (3)
)(.).(.)(.)( tjrsss etiMtiLt θψ += (4)
Siendo Vs un vector de voltaje que dependede las tensiones de línea y que la suma vectorialde ellas da cero, por lo que Vs puede serrepresentado por dos de sus tensiones Va y Vb,de la misma forma las corrientes de fase sumancero, por lo que pueden ser representadas por dosde sus corrientes de fase Ia e Ib.
Red NeuronalFeed -Forward
Atraso Z-1
Atraso Z-1
Xk Yk
Figura 1 Modelo de red neuronal NARX
Uno de los modelos m ás interesantes, demayor uso en sistemas de conversión analógicodigital ADC, es la red neuronal de tiempo discretoHopfield [4]. Otro modelo que es bastante usadoen la implementación de filtros digitales es la redneuronal de tiempo en atraso TDNN [5], donde lasalida es una función de las entradas y susrespectivos atrasos:
y(k)=F[x(k),x(k-1),x(k-2),....,x(k-n)] (1)
Donde yk es la salida y xk son las entradas
Estos tipos de RN pueden ser programadosfácilmente en DSP, los que suelen procesar filtrosde respuesta al impulso finito FIR.
Un modelo de red neuronal muy parecido alexpuesto anteriormente, y el cual es el utilizadoen el trabajo de investigación, es el de red no linealauto r egresiva c on e ntradas e xternas N ARX,utilizados en sistemas de identificación dinámicos.La definición de la ecuación de NARX permite lasiguiente solución:
W11
W12
W13
W14
W15
Va
Vb
Ia
Ib
?
Z-1 W16
W21
W22
W2 n-1
W2 n
Z-1
Va
Vb
Ia
Ib
?
W21
W22 W41
W42
W3 m
W31
W32 ? sa
? sß
Z-1
Figura 2 Red Neuronal NARX para la estimacióndel flujo del estator en ( α,β)
En la ecuación del flujo se observa la depen-dencia de las auto-inductancias e inductanciasmutuas, así como del ángulo del rotor θ.
θ
Ψsα
Ψsβ
Memorias - XVII CONIMERA
405
De la cual se puede deducir que:
[ ]kkkkkss IbIaVbVaFkk
θψψ ,,,,,1−
= (5)
Segunda Red Neuronal para la estimacióndel Flujo de Rotor
Para la estimación del flujo del rotor serequiere hacer el c álculo de las siguientesecuaciones:
ssr iLmLsLrLm
LmLr
ααα ψψ
−+= 2
.1 (6)
ssr iLmLsLrLm
LmLr
βββ ψψ
−+= 2
.1 (7)
Hallado el flujo del rotor en coordenadasestacionarias (α,β) se puede calcular la magnituddel flujo y su ángulo con:
( ) ( )22rrr βα ψψψ += (8)
=
r
rARCTANα
β
ψψ
θ (9)
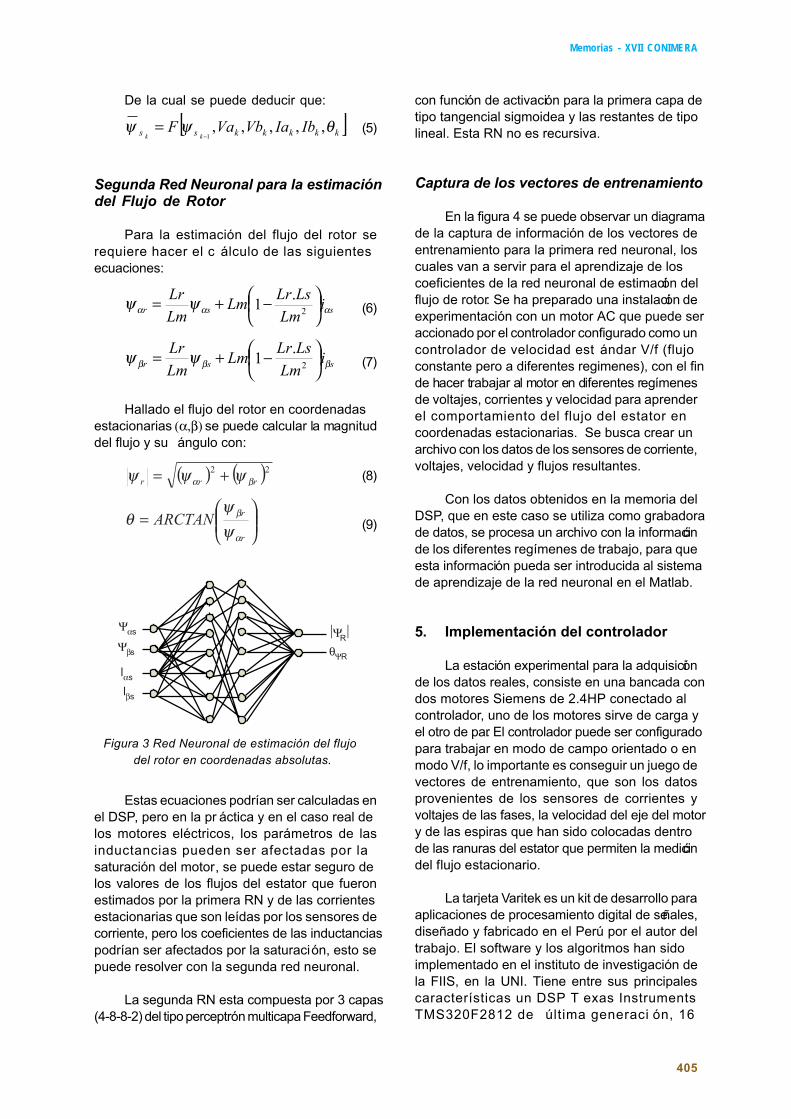
con función de activación para la primera capa detipo tangencial sigmoidea y las restantes de tipolineal. Esta RN no es recursiva.
Captura de los vectores de entrenamiento
En la figura 4 se puede observar un diagramade la captura de información de los vectores deentrenamiento para la primera red neuronal, loscuales van a servir para el aprendizaje de loscoeficientes de la red neuronal de estimación delflujo de rotor. Se ha preparado una instalación deexperimentación con un motor AC que puede seraccionado por el controlador configurado como uncontrolador de velocidad est ándar V/f (flujoconstante pero a diferentes regimenes), con el finde hacer trabajar al motor en diferentes regímenesde voltajes, corrientes y velocidad para aprenderel comportamiento del flujo del estator encoordenadas estacionarias. Se busca crear unarchivo con los datos de los sensores de corriente,voltajes, velocidad y flujos resultantes.
Con los datos obtenidos en la memoria delDSP, que en este caso se utiliza como grabadorade datos, se procesa un archivo con la informaciónde los diferentes regímenes de trabajo, para queesta información pueda ser introducida al sistemade aprendizaje de la red neuronal en el Matlab.
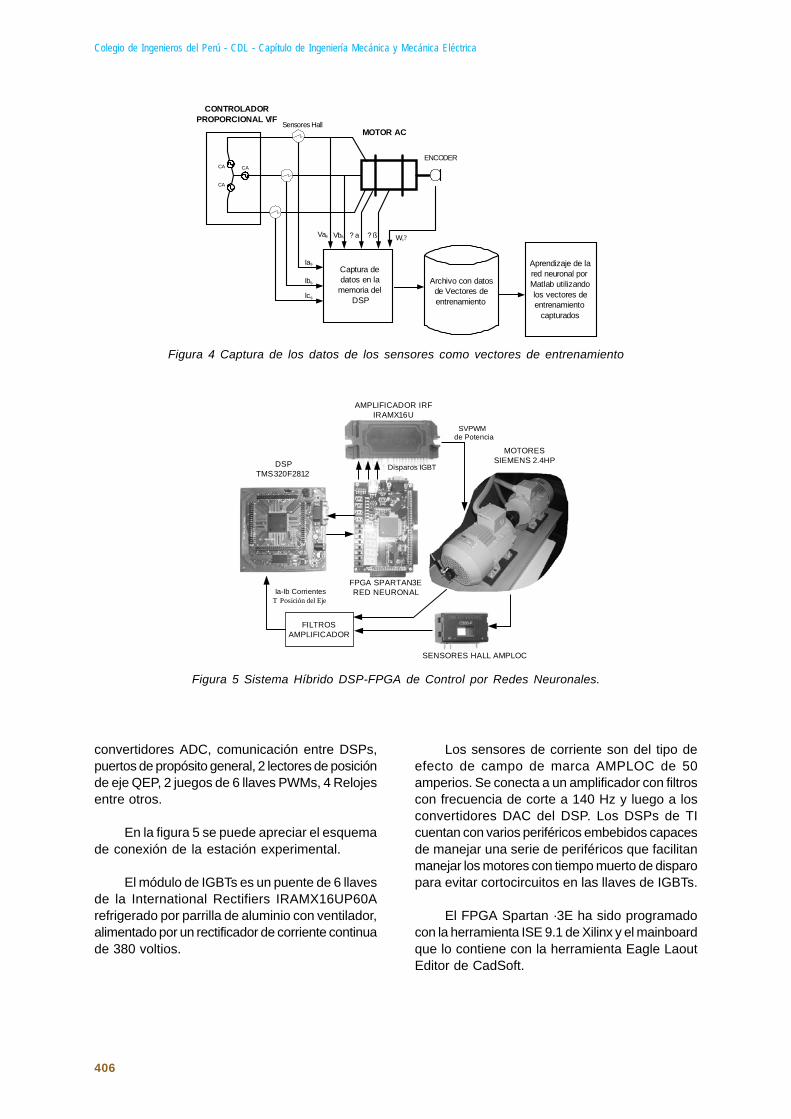
5. Implementación del controlador
La estación experimental para la adquisiciónde los datos reales, consiste en una bancada condos motores Siemens de 2.4HP conectado alcontrolador, uno de los motores sirve de carga yel otro de par. El controlador puede ser configuradopara trabajar en modo de campo orientado o enmodo V/f, lo importante es conseguir un juego devectores de entrenamiento, que son los datosprovenientes de los sensores de corrientes yvoltajes de las fases, la velocidad del eje del motory de las espiras que han sido colocadas dentrode las ranuras del estator que permiten la medicióndel flujo estacionario.
La tarjeta Varitek es un kit de desarrollo paraaplicaciones de procesamiento digital de señales,diseñado y fabricado en el Perú por el autor deltrabajo. El software y los algoritmos han sidoimplementado en el instituto de investigación dela FIIS, en la UNI. Tiene entre sus principalescaracterísticas un DSP T exas InstrumentsTMS320F2812 de última generaci ón, 16
Figura 3 Red Neuronal de estimación del flujodel rotor en coordenadas absolutas.
Estas ecuaciones podrían ser calculadas enel DSP, pero en la pr áctica y en el caso real delos motores eléctricos, los parámetros de lasinductancias pueden ser afectadas por lasaturación del motor, se puede estar seguro delos valores de los flujos del estator que fueronestimados por la primera RN y de las corrientesestacionarias que son leídas por los sensores decorriente, pero los coeficientes de las inductanciaspodrían ser afectados por la saturación, esto sepuede resolver con la segunda red neuronal.
La segunda RN esta compuesta por 3 capas(4-8-8-2) del tipo perceptrón multicapa Feedforward,
?? R?
?? R
? aS
? ßS
IaS
IßS
Ψαs
Ψβs
lαs
lβs
ΨRθΨR
Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
406
convertidores ADC, comunicación entre DSPs,puertos de propósito general, 2 lectores de posiciónde eje QEP, 2 juegos de 6 llaves PWMs, 4 Relojesentre otros.
En la figura 5 se puede apreciar el esquemade conexión de la estación experimental.
El módulo de IGBTs es un puente de 6 llavesde la International Rectifiers IRAMX16UP60Arefrigerado por parrilla de aluminio con ventilador,alimentado por un rectificador de corriente continuade 380 voltios.
Los sensores de corriente son del tipo deefecto de campo de marca AMPLOC de 50amperios. Se conecta a un amplificador con filtroscon frecuencia de corte a 140 Hz y luego a losconvertidores DAC del DSP. Los DSPs de TIcuentan con varios periféricos embebidos capacesde manejar una serie de periféricos que facilitanmanejar los motores con tiempo muerto de disparopara evitar cortocircuitos en las llaves de IGBTs.
El FPGA Spartan ·3E ha sido programadocon la herramienta ISE 9.1 de Xilinx y el mainboardque lo contiene con la herramienta Eagle LaoutEditor de CadSoft.
CA
CA
CA
Captura de datos en la
memoria del DSP
MOTOR AC
Archivo con datos de Vectores de entrenamiento
ENCODER
W,?Vas Vbs
Ias
Ibs
Ics
? a ? ß
CONTROLADORPROPORCIONAL V/F
Aprendizaje de la red neuronal por Matlab utilizando los vectores de entrenamiento
capturados
Sensores Hall
Figura 4 Captura de los datos de los sensores como vectores de entrenamiento
DSPTMS320F2812
FPGA SPARTAN3ERED NEURONAL
MOTORES SIEMENS 2.4HP
AMPLIFICADOR IRFIRAMX16U
SENSORES HALL AMPLOC
FILTROS AMPLIFICADOR
Ia-Ib CorrientesT Posición del Eje
Disparos IGBT
SVPWM de Potencia
Figura 5 Sistema Híbrido DSP-FPGA de Control por Redes Neuronales.
Memorias - XVII CONIMERA
407
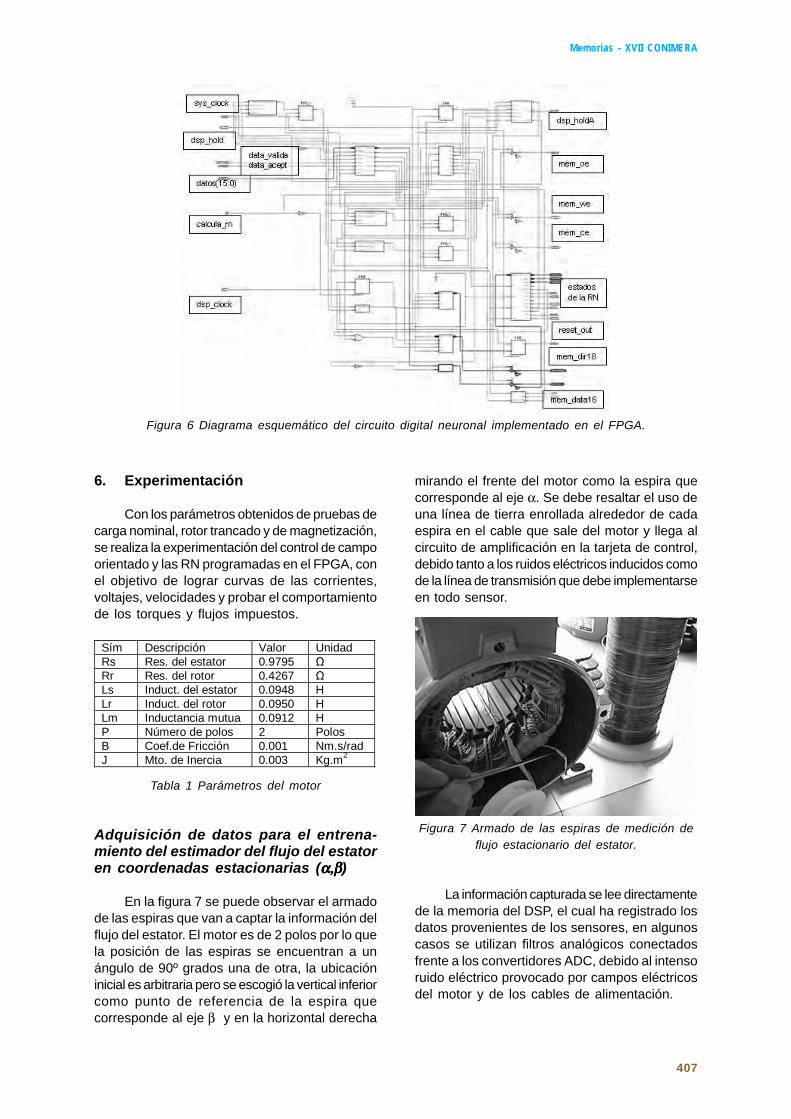
6. Experimentación
Con los parámetros obtenidos de pruebas decarga nominal, rotor trancado y de magnetización,se realiza la experimentación del control de campoorientado y las RN programadas en el FPGA, conel objetivo de lograr curvas de las corrientes,voltajes, velocidades y probar el comportamientode los torques y flujos impuestos.
mirando el frente del motor como la espira quecorresponde al eje α. Se debe resaltar el uso deuna línea de tierra enrollada alrededor de cadaespira en el cable que sale del motor y llega alcircuito de amplificación en la tarjeta de control,debido tanto a los ruidos eléctricos inducidos comode la línea de transmisión que debe implementarseen todo sensor.
Figura 6 Diagrama esquemático del circuito digital neuronal implementado en el FPGA.
Sím Descripción Valor Unidad Rs Res. del estator 0.9795 � Rr Res. del rotor 0.4267 � Ls Induct. del estator 0.0948 H Lr Induct. del rotor 0.0950 H Lm Inductancia mutua 0.0912 H P Número de polos 2 Polos B Coef.de Fricción 0.001 Nm.s/rad J Mto. de Inercia 0.003 Kg.m2
Tabla 1 Parámetros del motor
Adquisición de datos para el entrena-miento del estimador del flujo del estatoren coordenadas estacionarias (α,βα,βα,βα,βα,β)
En la figura 7 se puede observar el armadode las espiras que van a captar la información delflujo del estator. El motor es de 2 polos por lo quela posición de las espiras se encuentran a unángulo de 90º grados una de otra, la ubicacióninicial es arbitraria pero se escogió la vertical inferiorcomo punto de referencia de la espira quecorresponde al eje β y en la horizontal derecha
Figura 7 Armado de las espiras de medición deflujo estacionario del estator.
La información capturada se lee directamentede la memoria del DSP, el cual ha registrado losdatos provenientes de los sensores, en algunoscasos se utilizan filtros analógicos conectadosfrente a los convertidores ADC, debido al intensoruido eléctrico provocado por campos eléctricosdel motor y de los cables de alimentación.

Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
408
Primera prueba con arranque y cargaconstante a flujo constante
Se arranca el motor manteniendo una cargaconstante, la cual puede ser ejercida por un sistemade grúa, ascensor o cualquier dispositivo a torqueconstante.
Se debe mantener un flujo constante de 0.6
Weber y el torque a probar es de 1 N.m. En lasfiguras 8 y 9 se pueden observar las característicasdel flujo y el torque en el arranque respectivamente,la forma de onda senoidal del flujo se impone porlas características del campo orientado y la rotaciónde sus ejes, mientras que al torque se le puedeobservar estabilizándose a 1 N.m. aproximada-mente. Se graban 10,000 datos por variable en unintervalo de 1 segundo.
Figura 10 Velocidad en el arranque cuando una carga esta ejerciendo torque sobre el motor.
Figura 8 Regulación del Flujo del rotor en coordenadas absolutas.
Figura 9 Regulación del Torque del rotor en coordenadas absolutas.

Memorias - XVII CONIMERA
409
En la figura 10 se puede observar como lacarga inicial hace retroceder al motor por unos 0.1segundos, para luego comenzar a acelerar yestabilizarse a velocidad constante a los 0.7segundos aproximadamente.
Figura 11 Forma de onda senoidal de lacorriente de fase generada para controlar el flujo
y el torque
En la figura 11 se observa la corriente de unade las fases, impuesta al motor por el controlador,con una corriente aproximada de 1.12 amperios.
En la figura 12 se puede observar lacaracterística del voltaje de alimentación encoordenadas giratorias DQ, llegando a un voltajede 67 voltios en el lapso de 1 segundo.
Figura 12 Voltaje en coordenadas giratorias DQ.
Segunda prueba con cambio de carga
Apenas se esta terminando de estabilizar elmotor, a los 0.6 segundos se aumenta la cargarepentinamente, causando un aumento necesariode la corriente para compensar la variación.
Figura 13 Cambio de carga a flujo Constante
En la figura 14 se puede observar un cambiode carga a los 0.6 segundos, donde el controladorhace su trabajo y logra recuperarse en menos de0.25 segundos.
Figura 14 Cambio repentino de carga y suretorno gracias al controlador.
En la figura 15 se puede observar un cambioen los 0.6 segundos, donde la corriente cambiaabruptamente para compensar la diferencia detorque de la carga, incluso aumentando sufrecuencia, se debe tener en cuenta de que nosolo debe mantener un torque constante sinotambién un flujo constante.
Figura 15 Corriente generada para mantenerconstante el flujo y sobreponerse ante el cambio
de carga
7. Recomendaciones
Existen en el mercado algunos proveedoresde chips de redes neuronales y también demicrocontroladores fabricados en base a redes deinteligencia distribuidas, la mayoría de ellos dealgunos cientos a miles de neuronas y a un costorelativamente bajo, como los Echelon o los Toshiba,sin embargo la performance no tendría grandiferencia comparada con las redes neuronalesimplementadas en este trabajo, puesto que losFPGAs desarrollan una altísima velocidad deprocesamiento y son capaces de dar respuestaen algunos cuantos ciclos de reloj, a frecuenciasde 100-400MHz, es decir en menos de 100 nano-segundos. No se recomienda el uso de estoschips, sino mas bien utilizar una buena técnicade programación en VHDL dentro de los FPGAs
Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
410
y un buen protocolo de comunicación con el DSPusando memorias de acceso directo DMA. El DSPTMS320F2812 tiene incluido un sistema de DMAbastante simple de manejar y puede compartirmemorias de 1MB sin necesidad de muchoarbitraje.
La utilización de un buen sistema deprogramación y de componentes de calidad esimprescindible para la elaboración de sistemas decontrol, como el que se ha tratado de utilizar enel presente trabajo, generalmente las marcas deprocesadores y chips que tienen mayor éxito enla industria son aquellos que van acompañadosde suites de programación, como el programacompilador en C, Code Composer de la TexasInstruments y el sintetizador de VHDL de lacompañía XIlinx, así como la utilización deamplificadores International Rectifiers, los cualesson líderes en la industria de la electrónica y laautomatización. No se recomienda el uso deprocesadores de poca capacidad o de bajorendimiento, puesto que una falla puede provocarla destrucción de los amplificadores, circuitos,puede provocar daños personales o incluso algúnaccidente en la carga que se trata de manejar.
8. Conclusiones
Se ha presentado una nueva técnica desolución para el manejo de cargas y flujos de losmotores de inducción, gracias a los nuevosdesarrollos de dispositivos electrónicos digitales,como son los procesadores digitales DSPs y loscircuitos digitales FPGAs, los cuales permiten lasolución de algoritmos de control basados en redesneuronales.
Se ha procurado la fabricación de un sistemahíbrido entre DSPs y FPGAs, en este trabajo seconsidera deben ser complementarios. Se planteacomo futuros desarrollos que dentro de laarquitectura de los DSPs, estos puedan contenerFPGAs embebidos para la implementación decoprocesadores de ayuda, que se encarguen delos procesos en paralelo y de los formatosnuméricos en los que los DSPs tienen deficiencias.En la actualidad se puede contar con numerosos
modelos de microcontroladores y dsps, los quese están produciendo con periféricos destinadosal control de motores AC y DC, la mayoría disponede módulos con convertidores A/D, PWMs, lectoresde posición, capturadores de señales digitalesentre otros, sin embargo la potencia deprocesamiento necesaria vs. el costo del chip paraciertos algoritmos complejos como las redesneuronales, es aún una desventaja, los DSP defamilias diseñadas para el control trabajanentre los 40-150 MIPS (millones de instruccionespor segundo), que en algunos casos no logranterminar los algoritmos en un tiempo adecuado.Hay otros dsps de alto desempeño diseñadospara operar con señales de video ocomunicaciones, con velocidades de 1800 MIPS,pero sus precios son prohibitivos para el área decontrol, aún así el procesar algoritmosparalelos como las redes neuronales, deben serejecutados por dispositivos paralelos. Estedesbalance puede ser compensando haciendo usode los sistemas digitales flexibles como son losFPGAs, donde se pueden diseñar circuitossecuenciales y combinacionales de forma rápiday re-programable.
Antes de los 90s la información no eracompartida por los productores de componenteselectrónicos o chips, se trabajaba con arquitecturasmuy verticales y cerradas, sin embargo hoy endía, en un mundo que comienza a globalizarsegracias a los medios de comunicación y la internet,la información y los componentes están disponiblepara todos.
En el Perú se abre la posibilidad de producirdispositivos de alta tecnología, los elementosnecesarios se pueden encontrar en el mercado.La Universidad Peruana con sus institutos deinvestigación, es la encargada de explorar lasnuevas tecnologías y acercarlas a las empresas,de modo que se puede generar actividades denegocios encaminadas a la exportación deproductos tecnológico. Con el presente trabajo seha tratado de probar que se pueden producirtarjetas electrónicas y el software, diseñadas yfabricadas en el Perú, produciendo equipos deavanzada hechos a la medida de las necesidadesdel país.

Memorias - XVII CONIMERA
411
A.1 CONTROL POR CAMPO ORIENTADO
En esencia, el objetivo principal de laorientación de campo es el de desacoplar lasecuaciones de dependencia de los flujos ycorrientes que producen el torque electromagnético,de modo que el motor emule el comportamientodel motor DC, de manera que las ecuaciones decontrol sean más sencillas y fáciles de operar.
ANEXOS
Figura A1. Proyección de los ejes (á,â) en losejes giratorios (d,q).
Las figuras 1, 2 y 3 describen al motor deinducción en forma del modelo dinámico en régimentransitorio en ejes de coordenadas giratorias, lascuales se pueden definir por transformaciones Clark(α,β) para coordenadas en cuadratura estacionariasy transformaciones Park (d,q). para los ejesgiratorios. Las ecuaciones 1-13, describen elcomportamiento del motor de jaula de ardilla, enfunción de las variables de voltajes (V), corrientes(I), flujos (Ψ) y velocidades (w) transformadas aejes giratorios.
Figura A3. Modelo dinámico en el eje Q decoordenadas giratorias.
dsegqsqssqs wdt
diRV ψψ .. ++= (A1)
qsegdsdssds wdt
diRV ψψ .. −+= (A2)
drregqrqrrqr wwdt
diRV ψψ ).(. −++= (A3)
qrregdrdrrdr wwdt
diRV ψψ ).(. −−+= (A4)
qrmqssqs iLiL .. +=ψ (A5)
drmdssds iLiL .. +=ψ (A6)
qsmqrrqr iLiL .. +=ψ (A7)
dsmdrrdr iLiL .. +=ψ (A8)
Donde Lm es la inductancia mutua y los Lls conlas auto-inductancias:
mlss LLL += (A9)
mlr LLLr += (A10)
De las ecuaciones (4) y (8) y considerando Vdr=0por tratarse de una jaula de ardilla:
0).(.. =−−−+ qrregdsr
drdrr
r wwiRrL
Lm
dt
d
L
R ψψψ
(A11)
El Torque electromagnético en coordenadasgiratorias en función del flujo y la corriente delestator por:
)...(2
3dsqsqsds iippTe ψψ −= (A12)
También puede ser expresado en función del flujodel rotor y la corriente del estator:
)..(.2
3dsqrqsdr
r
m iiL
LppTe ψψ −= (A13)
En función de las corrientes solamente:
)...(.2
3dsqrqsdrm iiiiLppTe −= (A14)
Para la orientación del campo con el flujo del rotor,se considera que el eje giratorio DQ esta en
Figura A2. Modelo dinámico en el eje D decoordenadas giratorias.

Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
412
sincronismo con el flujo y que además el vectoresta alineado con el eje D. De este modo se tiene:
rdr ψψ = (A15)0=qrψ (A16)
Reemplazando ψqr = 0 y ψdr = ψr en laecuación 12, se obtiene finalmente:
qsrr
m iL
LppTem ..
2
3 ψ= (A17)
Y la ecuación que relaciona al flujo del rotorør con la corriente ids:
0.. =−+ dsr
rr
r
r iRrL
Lm
dt
d
L
R ψψ (A18)
En la ecuación A13 se aprecia la simplicidadde la reducción de un sistema trifásico, como esel de un motor de inducción, a las ecuaciones delmotor DC donde el torque es proporcional a unflujo y una corriente.
Se debe notar que el flujo y la corriente alhaber sido trasladado a ejes coordenadosgiratorios, estos no son ondas sinusoidales comoes el caso real en el flujo del entrehierro y lascorrientes en los conductores del motor, sino másbien valores de amplitudes.
Los controladores neuronales entonces,deben tratar de conseguir un flujo magnéticoconstante y una corriente adecuada para controlarel torque, por lo regular manteniendo el campomagnético alrededor de 0.6 a 1 Weber, sobre todoen régimen permanente, sin embargo a
condiciones de baja o alta velocidad, lascaracterísticas de los materiales magnéticos delmotor pueden producir condiciones no deseadas,así que el control neuronal puede prepararse paratrabajar de forma óptima entrenando a la red paraque compense dichas condiciones, creandocompensadores (boosters) a baja velocidad, ocontrolando el flujo a alta velocidad para que nose sature el motor.
Referencias
[1] Abdellfattah Ba-Razzouk, Chérite, Guy Olivier,«Field Oriented Control of Induction Motorsusing Neuronal Network Decouplers», IEEETransactions on Power Electronics, Vol 12,Nº4,USA July 1997.
[2] Luis Cabrera, Malik Elbuluk, Iqbal Husain,«Tuning the Stator Resistance of InductionMotors using artificial Neuronal Network», «,IEEE Transactions on Power Electronics, Vol12, Nº5,USA September 1997.
[3] Stamatios Kartalopoulos, AT&T BellLabs,»Understanding Neuronal Networks andFuzzy Logic», IEEE Press Understanding S&Tseries, 1966.
[4] John J. Hopfield, D:W:Tank, «NeuralComputation of Decisions in OptimizationProblems», Biologic Cybernetics, vol.52 ,1985.
[5] J. Hampshire, H. Webel, «A novel objectiveFunction for improved phoneme recognitionusing Time Delay Neuronal Networks»,Proceedings of IJCNN, pp I235-I241, June1989.
[6] Werner Leonhard, «Control of Electrical Drives»,Power Systems Springer, 3ra edición, 2001.