DPTO. FISICA APLICADA II - EUAT - faeuat0.us.esfaeuat0.us.es/ff/Carpetas/Apuntes/Tema05.pdf · El...
33
DPTO. FISICA APLICADA II - EUAT Cap´ ıtulo 5 Est´ atica de los sistemas de s´olidosr´ ıgidos 5.1. Introducci´ on. Sistemas de s´ olidos r´ ıgidos Un sistema de s´ olidos r´ ıgidos es un conjunto de s´ olidos r´ ıgidos que interac- sistema de s´olidos r´ ıgidos cionan entre s´ ı y con el exterior. Un sistema de s´ olidos r´ ıgidos es un modelo para describir un sistema mec´ ani- co, como lo son otros que hemos venido manejando en este texto (punto mate- rial, sistemas de puntos materiales, s´ olido r´ ıgido). En este cap´ ıtulo vamos a estudiar el equilibrio de sistemas mec´ anicos supo- niendo que su comportamiento mec´ anico se explica satisfactoriamente conside- rando que son sistemas de s´ olidos r´ ıgidos. En un sistema de s´ olidos r´ ıgidos llamamos ligadura o v´ ınculo a una interac- ligadura ci´on que tiene el efecto de limitar las posiciones que puede ocupar uno o varios de los s´ olidos r´ ıgidos. Diremos que un sistema est´ a ligado o vinculado si contiene ligaduras. Si la ligadura se produce entre uno de los s´ olidos y el exterior diremos que es una ligadura externa. ligadura externa Si la ligadura se produce ´ unicamente entre s´ olidos del sistema, diremos que es una ligadura interna. ligadura interna Llamaremos fuerzas de reacci´ on vincular internas y momentos de reacci´ on fuerzas de reacci´on vincular internas vincular internos a las fuerzas y momentos que, seg´ un el principio de liberaci´ on, momentos de reacci´on vincular internos sintetizan el efecto mec´ anico de ligaduras internas. Llamaremos fuerzas de reacci´ on vincular externas y momentos de reacci´ on fuerzas de reacci´on vincular externas vincular externos a las fuerzas y momentos que, seg´ un el principio de liberaci´ on, momentos de reacci´on vincular externos sintetizan el efecto mec´ anico de ligaduras externas. Las fuerzas activas (es decir, aqu´ ellas capaces de provocar movimiento) que fuerzas activas act´ uan sobre un sistema de s´ olidos r´ ıgidos son de dos tipos: Las fuerzas activas externas, que son aquellas debidas a la interacci´ on del sistema con agentes exteriores (el peso de los s´ olidos r´ ıgidos, por ejemplo). 133
Transcript of DPTO. FISICA APLICADA II - EUAT - faeuat0.us.esfaeuat0.us.es/ff/Carpetas/Apuntes/Tema05.pdf · El...

DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
Capıtulo 5
Estatica de los sistemas de
solidos rıgidos
5.1. Introduccion. Sistemas de solidos rıgidos
Un sistema de solidos rıgidos es un conjunto de solidos rıgidos que interac- sistema de solidos rıgidos
cionan entre sı y con el exterior.
Un sistema de solidos rıgidos es un modelo para describir un sistema mecani-co, como lo son otros que hemos venido manejando en este texto (punto mate-rial, sistemas de puntos materiales, solido rıgido).
En este capıtulo vamos a estudiar el equilibrio de sistemas mecanicos supo-niendo que su comportamiento mecanico se explica satisfactoriamente conside-rando que son sistemas de solidos rıgidos.
En un sistema de solidos rıgidos llamamos ligadura o vınculo a una interac- ligadura
cion que tiene el efecto de limitar las posiciones que puede ocupar uno o variosde los solidos rıgidos.
Diremos que un sistema esta ligado o vinculado si contiene ligaduras.
Si la ligadura se produce entre uno de los solidos y el exterior diremos quees una ligadura externa. ligadura externa
Si la ligadura se produce unicamente entre solidos del sistema, diremos quees una ligadura interna. ligadura interna
Llamaremos fuerzas de reaccion vincular internas y momentos de reaccionfuerzas de reaccion vincular internasvincular internos a las fuerzas y momentos que, segun el principio de liberacion,
momentos de reaccion vincular internossintetizan el efecto mecanico de ligaduras internas.
Llamaremos fuerzas de reaccion vincular externas y momentos de reaccionfuerzas de reaccion vincular externasvincular externos a las fuerzas y momentos que, segun el principio de liberacion,
momentos de reaccion vincular externossintetizan el efecto mecanico de ligaduras externas.
Las fuerzas activas (es decir, aquellas capaces de provocar movimiento) quefuerzas activasactuan sobre un sistema de solidos rıgidos son de dos tipos:
Las fuerzas activas externas, que son aquellas debidas a la interaccion delsistema con agentes exteriores (el peso de los solidos rıgidos, por ejemplo).
133

DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
134 Estatica de los sistemas de solidos rıgidos
Las fuerzas activas internas, que son las debidas a interacciones entrepartes del sistema (por ejemplo, un muelle que una dos partes del siste-ma).
El estudio del equilibrio de sistemas de solidos rıgidos nos permitira resolvervarios tipos de problemas. Por ejemplo:
Averiguar que fuerzas soportan las ligaduras que hay entre las vigas queforman un cierta estructura cuando esta soportando una cierta carga.
Averiguar que fuerzas externas soporta el terreno en el que se sustentauna estructura.
Averiguar cuando se puede suprimir una ligadura sin por ello poner enpeligro la estabilidad de un sistema.
Averiguar que fuerzas internas se producen en una viga cuando esta so-portando una cierta carga.
En estos problemas, en general, las fuerzas y momentos de reaccion vincularson incognitas del problema.
Antes de comenzar con el estudio del equilibrio de un sistema de solidosrıgidos procede hacer los siguientes comentarios sobre como se define un “siste-ma”. En los problemas que involucran varios solidos rıgidos suelen plantearsedos dilemas previos:
(A) ¿De cuantos solidos rıgidos esta formado el sistema?
(B) ¿Que cuerpos forman parte del sistema y cuales no?
La respuesta que se de a (A) va a determinar el numero de incognitas asociadasa vınculos y fuerzas interiores van a aparecer en el problema. La respuestaque se de a (B) va a determinar que vınculos y fuerzas se van a considerarcomo interiores y cuales como exteriores. Para un sistema de cuerpos dado, enprincipio hay varias elecciones posibles (compatibles con la suposicion de queel sistema es un conjunto de solidos rıgidos). En la practica, las elecciones quese hagan dependeran del problema concreto a estudiar.
EJEMPLO: Dos vigas soldadas entre sı y unidas al exterior mediante unaarticulacion se podran considerar como un unico solido rıgido, si lo que nosinteresa es averiguar las fuerzas que ha de soportar la articulacion; pero sera masconveniente suponer que se trata de dos solidos rıgidos si lo que nos interesa esaveriguar el momento que ha de soportar la soldadura. Esas dos vigas puedenformar parte de una estructura mas compleja (por ejemplo, un puente), perosi lo que nos interesa es unicamente averiguar las fuerzas que ha de soportar laarticulacion, lo mas practico sera suponer que el resto del puente es el exterior.
5.2. Condiciones necesarias y suficientes de equili-
brio
Un sistema de N solidos rıgidos esta en equilibrio si y solo si:

DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
5.3 El metodo de fragmentacion 135
Los N solidos estan inicialmente en reposo respecto a un sistema de re-ferencia inercial.
Los sistemas de fuerzas (externas e internas) que actuan sobre cada uno
de los N solidos son sistemas nulos. Es decir, para cada solido k (con
k = 1, . . . , N) sometido a mk fuerzas externas, ~Fi, y nk fuerzas internas,~fi, se debe cumplir:
mk∑
i=1
~Fi +
nk∑
j=1
~fj = ~0, (5.1)
mk∑
i=1
~MOk(~Fi) +
nk∑
j=1
~MOk(~fj) = ~0. (5.2)
Para cada solido rıgido k, se puede usar un punto Ok distinto para el calculode los momentos. Notese que los sumatorios de las fuerzas y de los momentosde las ecs. (5.1) y (5.2) se extienden hasta los mismos valores mk y nk. Esto esası porque estamos incluyendo los pares de fuerzas en la ec. (5.1), aun cuandosabemos que sus resultantes son nulas.
Cada una de las N ecuaciones vectoriales del tipo (5.1) y (5.2) se puedereescribir como 3 ecuaciones escalares.
En el caso plano, para cada solido obtendremos 3 ecuaciones escalares (dosde fuerzas y una de momentos), y por tanto en total tendremos 3N ecuacionesescalares linealmente independientes. Estas ecuaciones permitiran resolver 3Nincognitas, entre las que estaran incluidas incognitas de configuracion (que sonlas coordenadas o angulos de equilibrio de alguno de los solidos) y las incognitasasociadas a fuerzas y momentos activas y de reaccion vincular, tanto interiorescomo exteriores.
5.3. El metodo de fragmentacion
Cuando se estudia el equilibrio de un sistema de solidos rıgidos no siem-pre interesa determinar todas las fuerzas de reaccion vincular, de manera quepuede ser innecesario resolver el sistema formado por todas las ecuaciones deltipo (5.1) y (5.2). Esto nos lleva a adoptar una estrategia o metodo de generarecuaciones de equilibrio que se conoce como el metodo de fragmentacion . Este metodo de fragmentacion
metodo se basa en la siguiente observacion: Si fragmentamos mentalmente un
sistema de solidos que esta en equilibrio, cada uno de los fragmentos tambien
ha de estar en equilibrio.
El metodo de fragmentacion consta de 4 pasos:(I) Fragmentar el sistema en tantas partes como sea necesario para que en
las ecuaciones de equilibrio aparezcan explıcitamente las incognitas (de reaccionvincular y de configuracion) deseadas.
(II) Dibujar el diagrama de las fuerzas que actuan sobre cada uno de losfragmentos, teniendo en cuenta que hay que aplicar:
(a) El principio de liberacion, es decir, sustituir todos los vınculos (tantoexternos como internos) por las correspondientes fuerzas y momentos dereaccion vincular.

DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
136 Estatica de los sistemas de solidos rıgidos
(b) El principio de accion-reaccion o tercera ley de Newton a las fuerzas ymomentos interiores.
(III) Escribir las 3 ecuaciones de equilibrio (en el caso plano) correspon-dientes a cada uno de los N fragmentos.
(IV) Resolver el sistema formado por las 3N ecuaciones.
PROBLEMA RESUELTO 5.1:
El sistema plano de la figura consta de 4 barras de pesos despreciables sometidas alos siguientes vınculos: en A y E hay sendas articulaciones, en B un apoyo simple,en C y D sendas soldaduras, entre F y G una biela que forma 53◦ con la horizontal.Sabiendo que de H cuelga un peso de 100 N, determina las fuerzas de reaccionvincular en los puntos A, B, E y G. Datos adicionales: lAB = 1m, lBE = 6m,lBG = 3m, lEF = lEH/2.
PROBLEMA RESUELTO 5.1 Siste-ma de 4 solidos rıgidos. En A y E haysendas articulaciones, en B un apoyosimple, en C y D sendas soldaduras,entre F y G una biela que forma 53
◦
con la horizontal, y de H cuelga unpeso ~P .
A B
C
D
E
G
F
H
Solucion:
(a) Para que en las ecuaciones de equilibrio aparezcan las incognitas buscadas,basta con considerar dos fragmentos: la barra EH y el resto del sistema.
(b) Los diagramas de fuerzas de los dos fragmentos se ilustran en la fig. P1a.
Notese que en el diagrama de la izquierda los sentidos de ~φEx, ~φEy y ~φG
son los contrarios a los del diagrama de la derecha (y lo mismo ocurrirıa conlos sentidos de los momentos, si apareciesen momentos de reaccion vincularasociados a ligaduras internas).
(c) Tomando cos 53◦ = 35 y sen 53◦ = 4
5 , las ecuaciones de equilibrio del frag-mento de la izquierda son:
φAx − 3
5φG + φEx = 0, (P1.1)
φAy + φB − 4
5φG + φEy = 0, (P1.2)

DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
5.3 El metodo de fragmentacion 137
A B
C
D
E
G
fExfEy
fG
fAxfAy
fB
F
E H
-fEy
-fG
P
-fEx
FIGURA P1a: Diagramas de fuerzasde los dos fragmentos.
6φAx − 1φAy − 33
5φG = 0, (P1.3)
donde la ultima ecuacion se ha obtenido tomando momentos en E.
Las ecuaciones de equilibrio de la barra EH son:
−φEx +3
5φG = 0, (P1.4)
−φEy +4
5φG − 100 = 0, (P1.5)
lEH
2
4
5φG − lEH100 = 0, (P1.6)
donde la ultima ecuacion se ha obtenido tomando momentos en E. Noteseque no hace falta calcular lEH puesto que puede sacarse como factor comunen la ec. (P1.6).
(d) Resolviendo el sistema formado por las ecs. (P1.4)–(P1.3) obtenemos φEx =150N, φEy = 100N, φG = 250N, φAx = 0N, φAy = −450N y φB = 550N.Si queremos expresar vectorialmente la solucion diremos que sobre el frag-mento de la izquierda actuan las siguientes fuerzas de reaccion vincular: ~φA =(0,−450)N, ~φB = (0, 550)N, ~φG = (−150,−200)N, ~φE = (150, 100)N.
PROBLEMA RESUELTO 5.2:
El sistema plano de la figura consta de las barras uniformes, AC y CE, ambas delongitud l, que forman sendos angulos de 53◦ con la horizontal. El modulo del pesode la barra AC es P y el de la barra CE es 2P . Las barras estan articuladas entresı en el punto C y unidas por sus puntos medios mediante una biela horizontal BD.Ademas, la barra AC esta articulada con el exterior en el punto A y la barra CE

DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
138 Estatica de los sistemas de solidos rıgidos
tiene un apoyo simple sobre una superficie horizontal en el punto E. Para el estadode equilibrio, determina las fuerzas que sufren las barras en los puntos A, B, C,D y E en funcion de P .
PROBLEMA RESUELTO 5.2
EA
B
C
D
53o53o
Solucion:
(a) Para que en las ecuaciones de equilibrio aparezcan las incognitas buscadas,basta con considerar dos fragmentos: la barra AC y la barra CE.
(b) El diagrama de fuerzas de la barra AC se ilustra en la fig. P2a izda. y el dela barra CE en la fig. P2a dcha. Notese que en el diagrama de la izquierdalos sentidos de ~φB, ~φCx y ~φCy son los contrarios a los del diagrama de laderecha.
FIGURA P2a: Diagramas de fuer-zas de las barras AC (izda.) y CD
(dcha.).
E
C
D
A
B
C
fAx
fAy
fB-fCy
fCx
fCy
-fCx
-fB
2P
P
fE
(c) Tomando cos 53◦ = 35 y sen 53◦ = 4
5 , las ecuaciones de equilibrio de labarra AC son:
−φAx + φB − φCx = 0, (P2.1)
φAy − P + φCy = 0, (P2.2)
− l
2
4
5φB − l
2
3
5P + l
4
5φCx + l
3
5φCy = 0, (P2.3)
esta ultima ecuacion se ha obtenido tomando momentos en el punto A. Las

DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
5.3 El metodo de fragmentacion 139
ecuaciones de equilibrio de la barra CE son:
−φB + φCx = 0, (P2.4)
−φCy − 2P + φE = 0, (P2.5)
− l
2
4
5φB − l
2
3
52P + l
3
5φE = 0, (P2.6)
esta ultima ecuacion se ha obtenido tomando momentos en el punto C.
(d) Resolviendo el sistema formado por las ecs. (P2.1)–(P2.6) obtenemos: φAx =0, φAy = 5P
4 , φB = φCx = 9P8 , φCy = −P
4 , φE = 7P4 . La expresion
vectorial de las fuerzas de reaccion vincular que actuan sobre la barra ACes: ~φA =
(
0, 5P4
)
, ~φB =(
9P8 , 0
)
, ~φC =(
− 9P8 ,−P
4
)
.
En el ejemplo anterior hemos llegado a la solucion resolviendo el sistemaformado por las ecuaciones de los dos fragmentos. A veces, sin embargo,puede resultar mas sencillo resolver el sistema formado por las ecuaciones deuno de los fragmentos y las del sistema considerado como un todo.
Notese que las ecs. (P2.1)–(P2.3) correspondientes a la barra AC contienen5 incognitas de reaccion vincular, y las ecs. (P2.4)–(P2.6) correspondientesa la barra CE contienen 4 incognitas de reaccion vincular. Sin embargo, lasecuaciones correspondientes al sistema como un todo (vease fig. P2b),
−φAx = 0, (P2.7)
φAy − P − 2P + φE = 0, (P2.8)
−l4
5φAx − l
3
5φAy +
l
2
3
5P − l
2
3
52P + l
3
5φE = 0, (P2.9)
contienen solo 3 incognitas de reaccion vincular (la ultima ecuacion se haobtenido tomando momentos en C). Por tanto, el sistema formado por lasecs. (P2.4)–(P2.9) permite obtener las mismas soluciones y es mas sencillode resolver que el formado por las ecs. (P2.1)–(P2.6).
C
A
B
fAx
fAy
PE
D
2P
fEFIGURA P2b: Diagrama de fuerzasdel sistema formado por las barrasAC y CD considerado como un to-do.
Existen otros metodos para la resolucion de sistemas de solidos rıgidos comoel metodo de los nudos (que se basa en que si un sistema de solidos esta enequilibrio, cada uno de los nudos, puntos, considerado en esa sistema ha de estaren equilibrio) y el metodo de Ritter o metodo de las secciones que introduciremosen la seccion 5.5.
DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
140 Estatica de los sistemas de solidos rıgidos
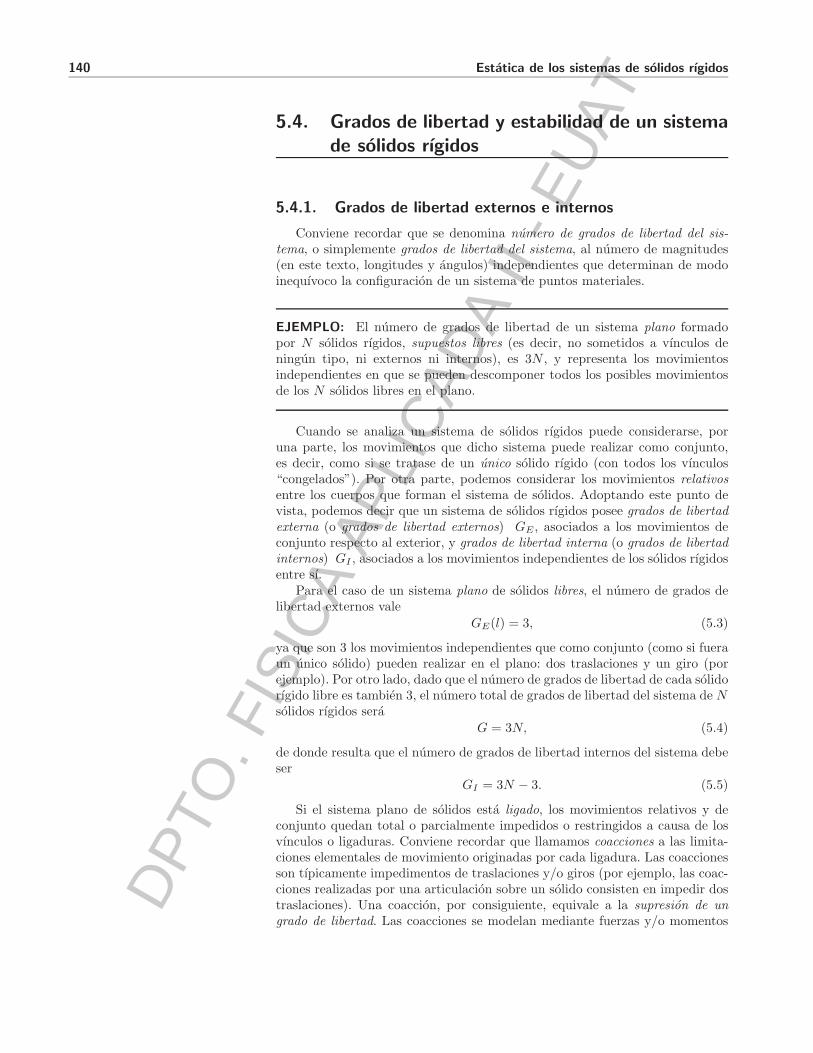
5.4. Grados de libertad y estabilidad de un sistema
de solidos rıgidos
5.4.1. Grados de libertad externos e internos
Conviene recordar que se denomina numero de grados de libertad del sis-
tema, o simplemente grados de libertad del sistema, al numero de magnitudes(en este texto, longitudes y angulos) independientes que determinan de modoinequıvoco la configuracion de un sistema de puntos materiales.
EJEMPLO: El numero de grados de libertad de un sistema plano formadopor N solidos rıgidos, supuestos libres (es decir, no sometidos a vınculos deningun tipo, ni externos ni internos), es 3N , y representa los movimientosindependientes en que se pueden descomponer todos los posibles movimientosde los N solidos libres en el plano.
Cuando se analiza un sistema de solidos rıgidos puede considerarse, poruna parte, los movimientos que dicho sistema puede realizar como conjunto,es decir, como si se tratase de un unico solido rıgido (con todos los vınculos“congelados”). Por otra parte, podemos considerar los movimientos relativos
entre los cuerpos que forman el sistema de solidos. Adoptando este punto devista, podemos decir que un sistema de solidos rıgidos posee grados de libertad
externa (o grados de libertad externos) GE , asociados a los movimientos deconjunto respecto al exterior, y grados de libertad interna (o grados de libertad
internos) GI , asociados a los movimientos independientes de los solidos rıgidosentre sı.
Para el caso de un sistema plano de solidos libres, el numero de grados delibertad externos vale
GE(l) = 3, (5.3)
ya que son 3 los movimientos independientes que como conjunto (como si fueraun unico solido) pueden realizar en el plano: dos traslaciones y un giro (porejemplo). Por otro lado, dado que el numero de grados de libertad de cada solidorıgido libre es tambien 3, el numero total de grados de libertad del sistema de Nsolidos rıgidos sera
G = 3N, (5.4)
de donde resulta que el numero de grados de libertad internos del sistema debeser
GI = 3N − 3. (5.5)
Si el sistema plano de solidos esta ligado, los movimientos relativos y deconjunto quedan total o parcialmente impedidos o restringidos a causa de losvınculos o ligaduras. Conviene recordar que llamamos coacciones a las limita-ciones elementales de movimiento originadas por cada ligadura. Las coaccionesson tıpicamente impedimentos de traslaciones y/o giros (por ejemplo, las coac-ciones realizadas por una articulacion sobre un solido consisten en impedir dostraslaciones). Una coaccion, por consiguiente, equivale a la supresion de un
grado de libertad. Las coacciones se modelan mediante fuerzas y/o momentos

DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
5.4 Grados de libertad y estabilidad de un sistema de solidos rıgidos 141
de reaccion vincular, de acuerdo con el principio de liberacion. Estas fuerzasy momentos de reaccion vincular introducen incognitas de reaccion vincularen el problema, en numero equivalente al de coacciones (por ejemplo, una ar-ticulacion introduce una fuerza de reaccion vincular con dos incognitas, quecorresponden a las dos coacciones realizadas por el vınculo).
De lo anterior se deduce que a causa de los vınculos externos e internospresentes debera disminuir el numero de grados de libertad global del sistemaG respecto al caso libre, y con el GE , GI , o ambos.
5.4.2. Estabilidad externa o estabilidad de sustentacion
El numero de grados de libertad externa, GE , esta exclusivamente condi-cionado por las ligaduras externas, puesto que estas son las unicas que pue-den impedir los movimientos de conjunto. Dado que para un sistema planoGE(l) = 3, las ligaduras externas deben ejercer un mınimo de 3 coacciones (elimpedimento de dos traslaciones y un giro, por ejemplo) para impedir todoslos movimientos del sistema de solidos como un todo.
En el caso plano, si el numero de coacciones externas es CE ≤ 3, el numero numero de coacciones externas
de grados de libertad externos del sistema de solidos se obtiene como
GE = 3 − CE . (5.6)
Si, por el contrario, CE > 3, el numero de grados de libertad externos es,por definicion, GE = 0. Alternativamente, GE recibe el nombre de grado de
inestabilidad externa del sistema.Segun el valor de CE pueden plantearse 3 situaciones:
CE = 3. En este caso las ligaduras externas son las estrictamente ne-cesarias en numero, y adecuadas en tipo y localizacion, para impedirlos movimientos del sistema de solidos como un todo: ello implica queaparecen 3 incognitas de reaccion vincular externas en las ecuaciones deequilibrio del sistema completo (que tambien son 3), y dichas incognitasse podran determinar a partir de tales ecuaciones. Por tanto,
GE = 0. (5.7)
Un sistema de este tipo se dice que es externamente isostatico o isostatico
de sustentacion.
CE > 3. En este caso las ligaduras externas son superabundantes ennumero, y eficaces por su tipo y localizacion, lo que significa que el numerode coacciones ejercidas por ellas es mayor que 3, y que los movimientosdel sistema como un todo quedan suprimidos. Entonces, el numero deincognitas de reaccion vincular externas supera al numero de ecuacionesde equilibrio del sistema completo. Por tanto, no pueden calcularse todaslas incognitas solo con las ecuaciones de la Estatica del sistema comple-
to1. Su determinacion require: (a) si el sistema es inestable de constitu-cion (vease mas adelante), usar las ecuaciones independientes “sobrantes”(vease mas adelante) para calcular alguna de las incognitas de reaccionvincular externas; (b) si el sistema es inestable de constitucion y las ecua-ciones generadas por el metodo (a) no son suficientes, o si el sistema es
1A veces, sin embargo, la simetrıa del problema reduce el numero de incognitas externas
de reaccion vincular efectivas, con lo cual ese calculo sı serıa posible.

DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
142 Estatica de los sistemas de solidos rıgidos
estable internamente (vease mas adelante), admitir que los solidos del sis-tema experimentan pequenas deformaciones, y recurrir a ecuaciones adi-cionales propias de la Elasticidad y Resistencia de Materiales. En estossistemas cabe la posibilidad de suprimir o modificar algunas ligaduras ex-ternas (no cualesquiera) sin que por ello puedan producirse movimientosde conjunto al aplicar fuerzas arbitrarias sobre el sistema. Para caracteri-zar la estabilidad externa del sistema de solidos cuando CE > 3 se defineel grado de hiperestaticidad externa del sistema,grado de hiperestaticidad externa
HE = |3 − CE | > 0, (5.8)
aunque no debe olvidarse que en estos sistemas GE = 0, de acuerdo conla definicion de grados de libertad. Un sistema de este tipo se dice que esexternamente hiperestatico, o hiperestatico de sustentacion, con grado deexternamente hiperestatico
hiperestaticidad externa HE .
CE < 3. En este caso las ligaduras externas ejercen un numero de coac-ciones menor que 3, insuficiente para cancelar todos los movimientos delsistema como un todo. Si las fuerzas se eligen convenientemente, el sis-tema puede estar en equilibrio como un todo respecto a un sistema dereferencia exterior pero, en general, el sistema se movera bajo la accion defuerzas cualesquiera. En el primer caso, seran aplicables las ecuaciones deequilibrio del sistema como un todo. A partir de ellas podran despejarsetodas las incognitas de reaccion vincular externas y, ademas, se obtendrancondiciones que deben ser satisfechas bien por las fuerzas activas externaso bien por la disposicion geometrica del sistema de solidos (parametros deconfiguracion), a fin de que el sistema este en equilibrio como conjunto.En estos sistemas,
GE > 0. (5.9)
Un sistema de este tipo se dice que es externamente inestable, o un me-externamente inestable
canismo de sustentacion, con grado de libertad externo GE .
Los sistemas externamente estables son tanto los externamente isostaticoscomo los externamente hiperestaticos.
Para terminar, una importante consideracion de ındole practica acerca deltipo y localizacion de las ligaduras: antes de determinar GE (o HE) hay quecomprobar si las ligaduras o vınculos externos son realmente eficaces a la horade ligar al sistema. Un analisis similar al que hicimos en el capıtulo 4 para el casode un unico solido rıgido demuestra que aquellos sistemas planos cuyas fuerzasde reaccion vincular externas sean todas paralelas o todas concurrentes en un
punto son externamente inestables, aunque sea CE > 3. En el apartado 5.4.5se discutira esto con mas detalle.
5.4.3. Estabilidad interna o estabilidad de constitucion
El numero de grados de libertad interna, GI , esta exclusivamente condicio-nado por las ligaduras internas, puesto que estas son las que pueden impedirlos movimientos relativos entre los solidos del sistema. Dado que para un siste-ma plano GI(l) = 3N − 3, las ligaduras internas estrictamente necesarias paraimpedir todos los movimientos relativos entre solidos deben ejercer 3N − 3coacciones (impedir 3N − 3 movimientos independientes).

DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
5.4 Grados de libertad y estabilidad de un sistema de solidos rıgidos 143
Si fragmentamos el sistema y consideramos los N solidos por separado segeneran 3N ecuaciones linealmente independientes que permiten despejar 3Nincognitas (entre externas e internas). Por otro lado, al estudiar el equilibriodel sistema considerandolo como un todo, se obtienen 3 ecuaciones de equili-brio. Estas 3 ecuaciones de equilibrio global son combinaciones lineales de las3N ecuaciones obtenidas al considerar los N solidos por separado.
En el caso plano, si el numero de coacciones internas es CI ≤ 3N − 3, el numero de coacciones internas
numero de grados de libertad internos del sistema de solidos se obtiene como
GI = 3N − 3 − CI . (5.10)
Si, por el contrario, CI > 3N − 3, el numero de grados de libertad internoses, por definicion, GI = 0. Alternativamente, GI recibe el nombre de grado de
inestabilidad interna del sistema o grado de deformabilidad interna del sistema. grado de inestabilidad interna
Segun el valor de CI pueden plantearse 3 situaciones:
CI = 3N − 3. En este caso las ligaduras internas son las estrictamentenecesarias en numero, y adecuadas en tipo y localizacion, para impedireficazmente los movimientos relativos de los solidos del sistema plano:ello implica que aparecen 3N −3 incognitas de reaccion vincular internasen las ecuaciones de equilibrio internas e independientes del sistema (quetambien son 3N − 3), y dichas incognitas se podran determinar a partirde tales ecuaciones. Un sistema de este tipo se dice que es internamente
isostatico o isostatico de constitucion. internamente isostatico
CI > 3N − 3. En este caso las ligaduras internas son superabundantes ennumero, y eficaces por su tipo y localizacion, lo que significa que el numerode coacciones ejercidas por ellas es mayor que 3N − 3, y que los movi-mientos relativos quedan suprimidos. Entonces el numero de incognitasde reaccion vincular internas supera al numero de ecuaciones de equili-
brio internas independientes del sistema. Su determinacion admitir quelos solidos del sistema experimentan pequenas deformaciones, y recurrir aecuaciones adicionales propias de la Elasticidad y Resistencia de Materia-les. En estos sistemas cabe la posibilidad de suprimir o modificar algunasligaduras internas (no cualesquiera) sin que por ello puedan producirsemovimientos relativos entre solidos al aplicar fuerzas arbitrarias sobre elsistema. Para caracterizar la estabilidad externa del sistema de solidoscuando CI > 3N − 3 se define el grado de hiperestaticidad interna del
sistema,HI = |3N − 3 − CI | > 0, (5.11)
aunque no debe olvidarse que en estos sistemas GI = 0, de acuerdo conla definicion de grados de libertad. Un sistema de este tipo se dice que esinternamente hiperestatico, o hiperestatico de constitucion, con grado de internamente hiperestatico
hiperestaticidad interna HI .
CI < 3N − 3. En este caso las ligaduras internas ejercen un numero decoacciones insuficiente para cancelar todos los movimientos relativos posi-bles entre los solidos. Si las fuerzas se eligen convenientemente, el sistemapuede estar en equilibrio relativo interno pero, en general, las distintaspartes del sistema se podran mover unas respecto a otras internamentebajo la accion de fuerzas cualesquiera. En el primer caso, seran apli-cables las ecuaciones de equilibrio internas independientes. A partir de
DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
144 Estatica de los sistemas de solidos rıgidos
ellas podran despejarse todas las incognitas de reaccion vincular internas(aunque en funcion de las externas, si las hubiera). En este caso,
GI > 0. (5.12)
Un sistema de este tipo se dice que es internamente inestable, interna-internamente inestable
mente deformable, inestable de constitucion, o deformable de constitucion,con grado de libertad interna GI .
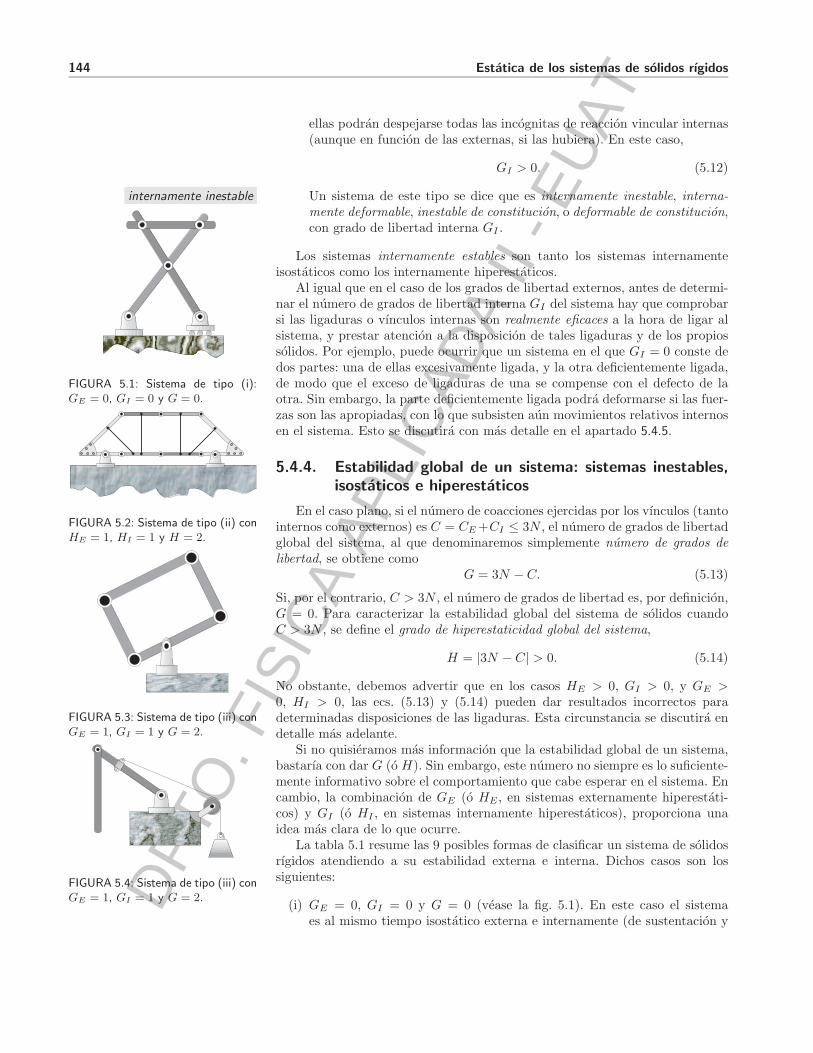
FIGURA 5.1: Sistema de tipo (i):GE = 0, GI = 0 y G = 0.
FIGURA 5.2: Sistema de tipo (ii) conHE = 1, HI = 1 y H = 2.
FIGURA 5.3: Sistema de tipo (iii) conGE = 1, GI = 1 y G = 2.
FIGURA 5.4: Sistema de tipo (iii) conGE = 1, GI = 1 y G = 2.
Los sistemas internamente estables son tanto los sistemas internamenteisostaticos como los internamente hiperestaticos.
Al igual que en el caso de los grados de libertad externos, antes de determi-nar el numero de grados de libertad interna GI del sistema hay que comprobarsi las ligaduras o vınculos internas son realmente eficaces a la hora de ligar alsistema, y prestar atencion a la disposicion de tales ligaduras y de los propiossolidos. Por ejemplo, puede ocurrir que un sistema en el que GI = 0 conste dedos partes: una de ellas excesivamente ligada, y la otra deficientemente ligada,de modo que el exceso de ligaduras de una se compense con el defecto de laotra. Sin embargo, la parte deficientemente ligada podra deformarse si las fuer-zas son las apropiadas, con lo que subsisten aun movimientos relativos internosen el sistema. Esto se discutira con mas detalle en el apartado 5.4.5.
5.4.4. Estabilidad global de un sistema: sistemas inestables,
isostaticos e hiperestaticos
En el caso plano, si el numero de coacciones ejercidas por los vınculos (tantointernos como externos) es C = CE +CI ≤ 3N , el numero de grados de libertadglobal del sistema, al que denominaremos simplemente numero de grados de
libertad, se obtiene comoG = 3N − C. (5.13)
Si, por el contrario, C > 3N , el numero de grados de libertad es, por definicion,G = 0. Para caracterizar la estabilidad global del sistema de solidos cuandoC > 3N , se define el grado de hiperestaticidad global del sistema,
H = |3N − C| > 0. (5.14)
No obstante, debemos advertir que en los casos HE > 0, GI > 0, y GE >0, HI > 0, las ecs. (5.13) y (5.14) pueden dar resultados incorrectos paradeterminadas disposiciones de las ligaduras. Esta circunstancia se discutira endetalle mas adelante.
Si no quisieramos mas informacion que la estabilidad global de un sistema,bastarıa con dar G (o H). Sin embargo, este numero no siempre es lo suficiente-mente informativo sobre el comportamiento que cabe esperar en el sistema. Encambio, la combinacion de GE (o HE , en sistemas externamente hiperestati-cos) y GI (o HI , en sistemas internamente hiperestaticos), proporciona unaidea mas clara de lo que ocurre.
La tabla 5.1 resume las 9 posibles formas de clasificar un sistema de solidosrıgidos atendiendo a su estabilidad externa e interna. Dichos casos son lossiguientes:
(i) GE = 0, GI = 0 y G = 0 (vease la fig. 5.1). En este caso el sistemaes al mismo tiempo isostatico externa e internamente (de sustentacion y

DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
5.4 Grados de libertad y estabilidad de un sistema de solidos rıgidos 145
HE > 0 (y GE = 0) GE = 0 GE > 0
HI > 0 (y GI = 0) H > 0 (y G = 0), H > 0 (y G = 0), G > 0 (por inspeccion),
vease (ii) vease (vi) vease (v)
GI = 0 H > 0 (y G = 0), G = 0, G > 0,
vease (vii) vease (i) vease (ix)
GI > 0 hiperestatico, isostatico o mecanismo, G > 0, G > 0,
H o G por inspeccion, vease (iv) vease (viii) vease (iii)
TABLA 5.1: Las 9 clases de sistemas de solidos rıgidos segun su estabilidad externa e interna.
de constitucion). Los vınculos externos e internos son los estrictamentenecesarios en numero, y del tipo y localizacion adecuados, para impe-dir de modo eficaz los movimientos relativos y de conjunto del sistemade solidos, sean cuales fueren las fuerzas que se apliquen. Sera posibledeterminar a partir de las ecuaciones de equilibrio todas las incognitasde reaccion vincular. El sistema es globalmente isostatico o estaticamente
determinado.
FIGURA 5.5: Sistema globalmente hi-perestatico de tipo (iv) con HE = 2,GI = 1 y, por inspeccion, H = 1.
FIGURA 5.6: Sistema globalmente hi-perestatico de tipo (iv) con HE = 2,GI = 1 y, por inspeccion, H = 1.
FIGURA 5.7: Sistema globalmenteisostatico de tipo (iv) con HE = 1,GI = 1 y, por inspeccion, G = 0.
(ii) HE > 0, HI > 0 y H > 0 (vease la fig. 5.2). En este caso el sistemaes a la vez hiperestatico externa e internamente. Los vınculos externose internos son en ambos casos superabundantes, el tipo y distribucionde unos y otros es el adecuado, y los posibles movimientos relativos yde conjunto estan impedidos (ademas, lo estan con suficiencia). No esposible determinar los valores de todas las incognitas de reaccion vincularmediante el exclusivo recurso a las ecuaciones de equilibrio de la Estatica.El sistema es globalmente hiperestatico, o estaticamente indeterminado, degrado H.
(iii) GE > 0, GI > 0 y G > 0 (vease las figs. 5.3 y 5.4). En este caso el sistemaes externa e internamente inestable. Los vınculos externos e internos soninsuficientes para impedir todo movimiento relativo y de conjunto. Si seaplican fuerzas al sistema, en general se movera y deformara. Aun ası,elegidas convenientemente las fuerzas, el sistema puede permanecer enequilibrio, y en ese caso podrıamos escribir las oportunas ecuaciones deequilibrio y a partir de ellas determinar los valores de todas las incognitasde reaccion vincular. El sistema es globalmente mecanismo de grado G, olo que es lo mismo, es inestable de grado G.
(iv) HE > 0 y GI > 0 (vease las figs. 5.5, 5.6, 5.7, 5.8, 5.9 y 5.10). Eneste caso es necesario estudiar la mutua influencia entre las ligadurasexternas y las internas en relacion con los posibles movimientos relati-vos interiores. Los movimientos de conjunto estan neutralizados debidoa la hiperestaticidad externa del sistema. Aparentemente, dado que elsistema es deformable internamente, subsistirıan movimientos relativosno cancelados entre solidos. Sin embargo, debemos tener en cuenta quesi las superabundantes ligaduras externas son suficientes en numero, son
del tipo adecuado y estan convenientemente situadas, pueden contribuir
a impedir los movimientos relativos entre los solidos del sistema, “cola-
borando” con las ligaduras internas. Si este fuera el caso, el sistema de
DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
146 Estatica de los sistemas de solidos rıgidos
solidos tendrıa G = 0 y, si ademas HE > GI , tendrıa un grado de hiper-estaticidad global dado por la ec. (5.14). El sistema quedarıa clasificadocomo globalmente hiperestatico (si HE > GI , vease las figs. 5.5 y 5.6) oglobalmente isostatico (si HE = GI , vease la fig. 5.7).
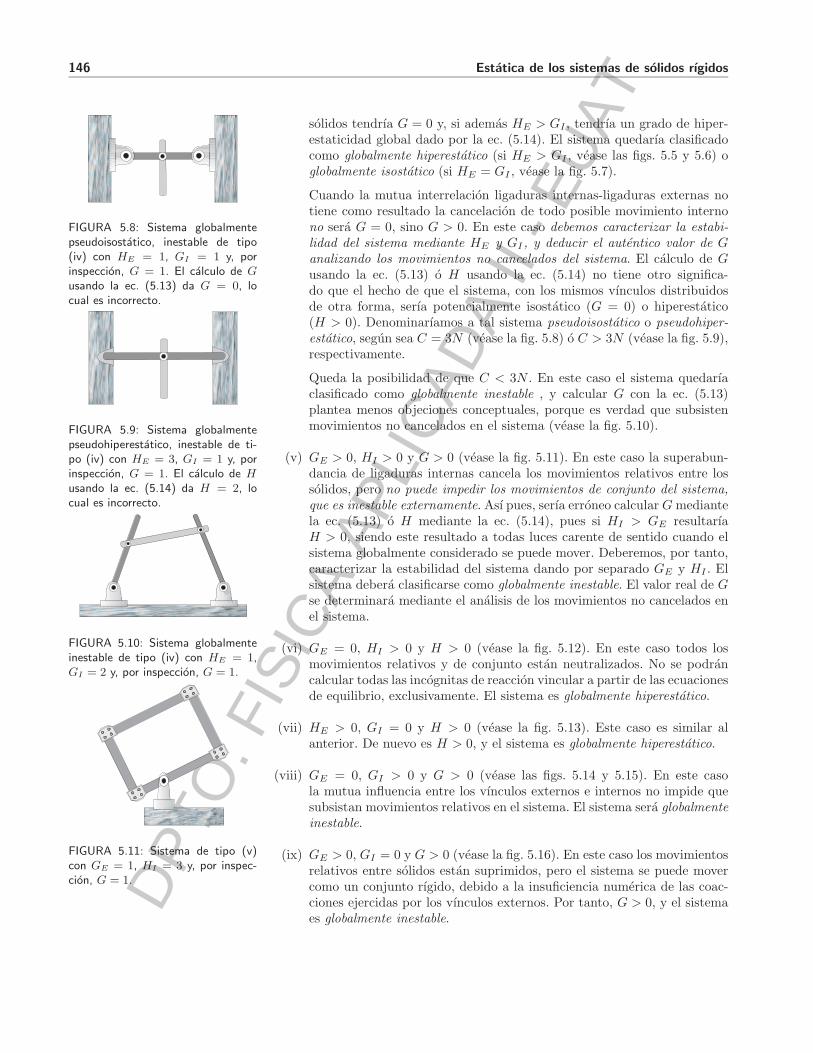
FIGURA 5.8: Sistema globalmentepseudoisostatico, inestable de tipo(iv) con HE = 1, GI = 1 y, porinspeccion, G = 1. El calculo de G
usando la ec. (5.13) da G = 0, locual es incorrecto.
FIGURA 5.9: Sistema globalmentepseudohiperestatico, inestable de ti-po (iv) con HE = 3, GI = 1 y, porinspeccion, G = 1. El calculo de H
usando la ec. (5.14) da H = 2, locual es incorrecto.
FIGURA 5.10: Sistema globalmenteinestable de tipo (iv) con HE = 1,GI = 2 y, por inspeccion, G = 1.
FIGURA 5.11: Sistema de tipo (v)con GE = 1, HI = 3 y, por inspec-cion, G = 1.
Cuando la mutua interrelacion ligaduras internas-ligaduras externas notiene como resultado la cancelacion de todo posible movimiento internono sera G = 0, sino G > 0. En este caso debemos caracterizar la estabi-
lidad del sistema mediante HE y GI , y deducir el autentico valor de Ganalizando los movimientos no cancelados del sistema. El calculo de Gusando la ec. (5.13) o H usando la ec. (5.14) no tiene otro significa-do que el hecho de que el sistema, con los mismos vınculos distribuidosde otra forma, serıa potencialmente isostatico (G = 0) o hiperestatico(H > 0). Denominarıamos a tal sistema pseudoisostatico o pseudohiper-
estatico, segun sea C = 3N (vease la fig. 5.8) o C > 3N (vease la fig. 5.9),respectivamente.
Queda la posibilidad de que C < 3N . En este caso el sistema quedarıaclasificado como globalmente inestable , y calcular G con la ec. (5.13)plantea menos objeciones conceptuales, porque es verdad que subsistenmovimientos no cancelados en el sistema (vease la fig. 5.10).
(v) GE > 0, HI > 0 y G > 0 (vease la fig. 5.11). En este caso la superabun-dancia de ligaduras internas cancela los movimientos relativos entre lossolidos, pero no puede impedir los movimientos de conjunto del sistema,
que es inestable externamente. Ası pues, serıa erroneo calcular G mediantela ec. (5.13) o H mediante la ec. (5.14), pues si HI > GE resultarıaH > 0, siendo este resultado a todas luces carente de sentido cuando elsistema globalmente considerado se puede mover. Deberemos, por tanto,caracterizar la estabilidad del sistema dando por separado GE y HI . Elsistema debera clasificarse como globalmente inestable. El valor real de Gse determinara mediante el analisis de los movimientos no cancelados enel sistema.
(vi) GE = 0, HI > 0 y H > 0 (vease la fig. 5.12). En este caso todos losmovimientos relativos y de conjunto estan neutralizados. No se podrancalcular todas las incognitas de reaccion vincular a partir de las ecuacionesde equilibrio, exclusivamente. El sistema es globalmente hiperestatico.
(vii) HE > 0, GI = 0 y H > 0 (vease la fig. 5.13). Este caso es similar alanterior. De nuevo es H > 0, y el sistema es globalmente hiperestatico.
(viii) GE = 0, GI > 0 y G > 0 (vease las figs. 5.14 y 5.15). En este casola mutua influencia entre los vınculos externos e internos no impide quesubsistan movimientos relativos en el sistema. El sistema sera globalmente
inestable.
(ix) GE > 0, GI = 0 y G > 0 (vease la fig. 5.16). En este caso los movimientosrelativos entre solidos estan suprimidos, pero el sistema se puede movercomo un conjunto rıgido, debido a la insuficiencia numerica de las coac-ciones ejercidas por los vınculos externos. Por tanto, G > 0, y el sistemaes globalmente inestable.
DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
5.4 Grados de libertad y estabilidad de un sistema de solidos rıgidos 147
5.4.5. Sistemas propia e impropiamente ligados
Diremos que un sistema de solidos esta propiamente ligado cuando las li-gaduras, por su numero, tipo, distribucion y disposicion, son capaces de im-pedir eficazmente todo movimiento del sistema. En caso contrario, el sistemaestara impropiamente ligado.
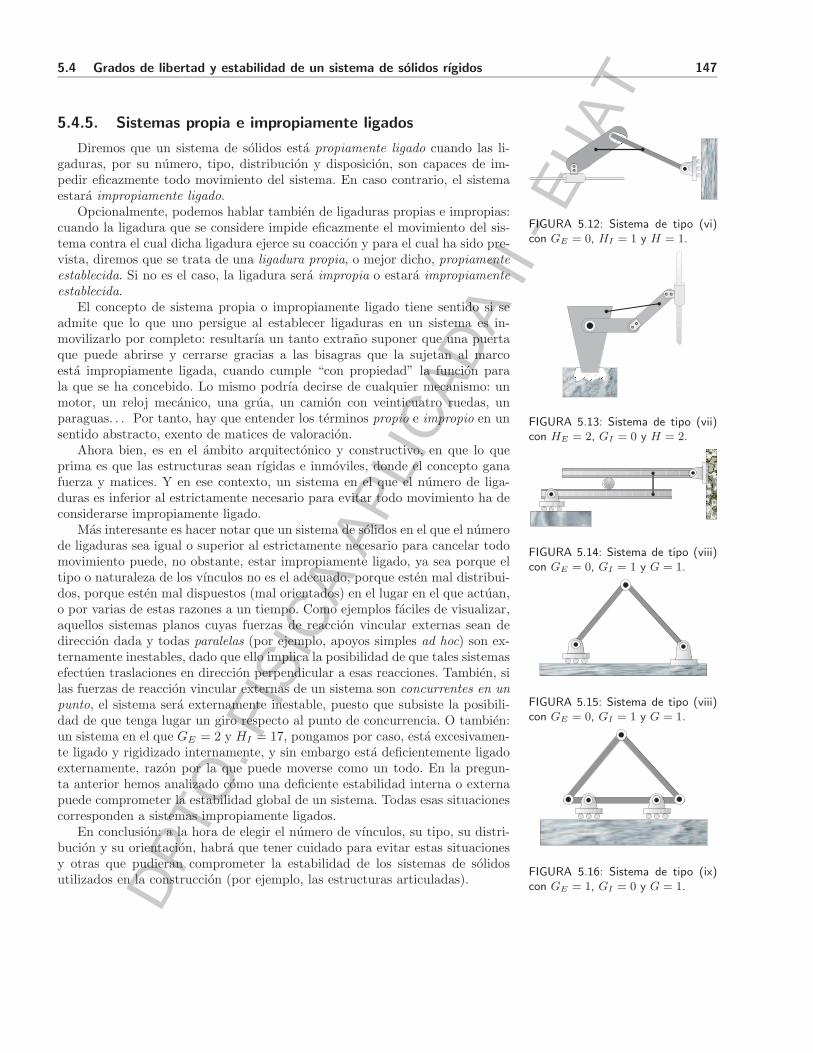
FIGURA 5.12: Sistema de tipo (vi)con GE = 0, HI = 1 y H = 1.
FIGURA 5.13: Sistema de tipo (vii)con HE = 2, GI = 0 y H = 2.
FIGURA 5.14: Sistema de tipo (viii)con GE = 0, GI = 1 y G = 1.
FIGURA 5.15: Sistema de tipo (viii)con GE = 0, GI = 1 y G = 1.
FIGURA 5.16: Sistema de tipo (ix)con GE = 1, GI = 0 y G = 1.
Opcionalmente, podemos hablar tambien de ligaduras propias e impropias:cuando la ligadura que se considere impide eficazmente el movimiento del sis-tema contra el cual dicha ligadura ejerce su coaccion y para el cual ha sido pre-vista, diremos que se trata de una ligadura propia, o mejor dicho, propiamente
establecida. Si no es el caso, la ligadura sera impropia o estara impropiamente
establecida.El concepto de sistema propia o impropiamente ligado tiene sentido si se
admite que lo que uno persigue al establecer ligaduras en un sistema es in-movilizarlo por completo: resultarıa un tanto extrano suponer que una puertaque puede abrirse y cerrarse gracias a las bisagras que la sujetan al marcoesta impropiamente ligada, cuando cumple “con propiedad” la funcion parala que se ha concebido. Lo mismo podrıa decirse de cualquier mecanismo: unmotor, un reloj mecanico, una grua, un camion con veinticuatro ruedas, unparaguas. . . Por tanto, hay que entender los terminos propio e impropio en unsentido abstracto, exento de matices de valoracion.
Ahora bien, es en el ambito arquitectonico y constructivo, en que lo queprima es que las estructuras sean rıgidas e inmoviles, donde el concepto ganafuerza y matices. Y en ese contexto, un sistema en el que el numero de liga-duras es inferior al estrictamente necesario para evitar todo movimiento ha deconsiderarse impropiamente ligado.
Mas interesante es hacer notar que un sistema de solidos en el que el numerode ligaduras sea igual o superior al estrictamente necesario para cancelar todomovimiento puede, no obstante, estar impropiamente ligado, ya sea porque eltipo o naturaleza de los vınculos no es el adecuado, porque esten mal distribui-dos, porque esten mal dispuestos (mal orientados) en el lugar en el que actuan,o por varias de estas razones a un tiempo. Como ejemplos faciles de visualizar,aquellos sistemas planos cuyas fuerzas de reaccion vincular externas sean dedireccion dada y todas paralelas (por ejemplo, apoyos simples ad hoc) son ex-ternamente inestables, dado que ello implica la posibilidad de que tales sistemasefectuen traslaciones en direccion perpendicular a esas reacciones. Tambien, silas fuerzas de reaccion vincular externas de un sistema son concurrentes en un
punto, el sistema sera externamente inestable, puesto que subsiste la posibili-dad de que tenga lugar un giro respecto al punto de concurrencia. O tambien:un sistema en el que GE = 2 y HI = 17, pongamos por caso, esta excesivamen-te ligado y rigidizado internamente, y sin embargo esta deficientemente ligadoexternamente, razon por la que puede moverse como un todo. En la pregun-ta anterior hemos analizado como una deficiente estabilidad interna o externapuede comprometer la estabilidad global de un sistema. Todas esas situacionescorresponden a sistemas impropiamente ligados.
En conclusion: a la hora de elegir el numero de vınculos, su tipo, su distri-bucion y su orientacion, habra que tener cuidado para evitar estas situacionesy otras que pudieran comprometer la estabilidad de los sistemas de solidosutilizados en la construccion (por ejemplo, las estructuras articuladas).
DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
148 Estatica de los sistemas de solidos rıgidos
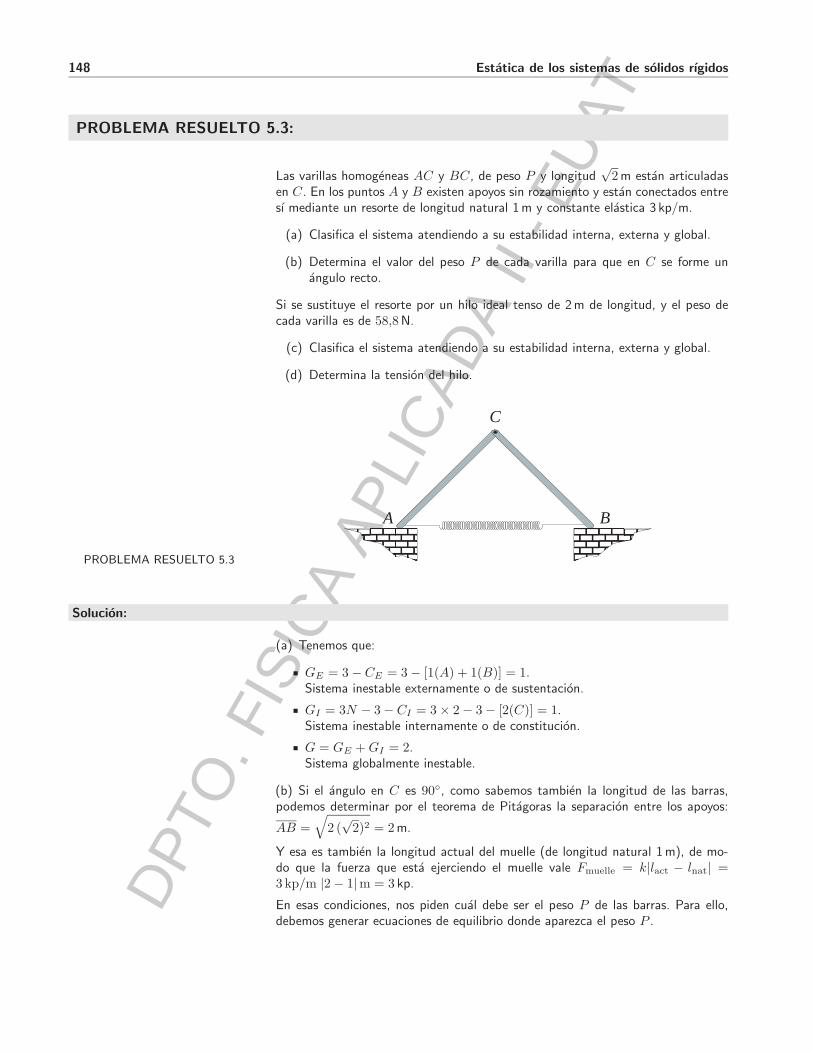
PROBLEMA RESUELTO 5.3:
Las varillas homogeneas AC y BC, de peso P y longitud√
2 m estan articuladasen C. En los puntos A y B existen apoyos sin rozamiento y estan conectados entresı mediante un resorte de longitud natural 1 m y constante elastica 3 kp/m.
(a) Clasifica el sistema atendiendo a su estabilidad interna, externa y global.
(b) Determina el valor del peso P de cada varilla para que en C se forme unangulo recto.
Si se sustituye el resorte por un hilo ideal tenso de 2 m de longitud, y el peso decada varilla es de 58,8 N.
(c) Clasifica el sistema atendiendo a su estabilidad interna, externa y global.
(d) Determina la tension del hilo.
PROBLEMA RESUELTO 5.3
C
A B
Solucion:
(a) Tenemos que:
GE = 3 − CE = 3 − [1(A) + 1(B)] = 1.Sistema inestable externamente o de sustentacion.
GI = 3N − 3 − CI = 3 × 2 − 3 − [2(C)] = 1.Sistema inestable internamente o de constitucion.
G = GE + GI = 2.Sistema globalmente inestable.
(b) Si el angulo en C es 90◦, como sabemos tambien la longitud de las barras,podemos determinar por el teorema de Pitagoras la separacion entre los apoyos:
AB =√
2 (√
2)2 = 2m.
Y esa es tambien la longitud actual del muelle (de longitud natural 1 m), de mo-do que la fuerza que esta ejerciendo el muelle vale Fmuelle = k|lact − lnat| =3kp/m |2 − 1|m = 3 kp.
En esas condiciones, nos piden cual debe ser el peso P de las barras. Para ello,debemos generar ecuaciones de equilibrio donde aparezca el peso P .

DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
5.4 Grados de libertad y estabilidad de un sistema de solidos rıgidos 149
Si probamos con las ecuaciones del sistema completo, que evitan los vınculos inter-
nos (la articulacion en C) y las fuerzas activas internas (la del muelle en este caso),parece que vamos a disponer de 3 ecuaciones con 3 incognitas (φA, φB y P ), perovamos a ver que es lo que pasa realmente. Para ello, dibujamos el diagrama desolido libre correspondiente al sistema completo: A B
C
P P
fA fB
2 m 2 m
0,5 m 0,5 m 0,5 m 0,5 m
+
x
y← ←
← ←
FIGURA P3a: Resolucion del apar-tado (b) del problema 5-1. Sistemacompleto.
De donde planteamos las siguientes ecuaciones de equilibrio:∑
Fx = 0 :
0 = 0, (P3.1)∑
Fy = 0 :
−2P + φA + φB = 0, (P3.2)∑
MCz = 0 :
P 0,5 − P 0,5 − φA 1 + φB 1 = 0, (P3.3)
resultando ası un sistema de dos ecuaciones independientes con 3 incognitas, queresolvemos en funcion de una de ellas, P :
φA = φB = P. (P3.4)
Resulta ası que la simetrıa de la situacion a “inutilizado” una de las ecuacionesde equilibrio, y no nos queda otro remedio que fragmentar el sistema para generarlas ecuaciones de equilibrio de una de las barras. En principio, parece que nosbastara con una sola de sus ecuaciones, pero hay que pensar que al fragmentaraparecen nuevas incognitas de reaccion (las de los vınculos internos), que necesitande mas ecuaciones para poder resolver.
Ası, dibujamos el diagrama de solido libre de la barra AC (en principio, se puedeescoger cualquiera de los fragmentos, eligiendo el que sea mas simple de estudiar—y contenga por supuesto las incognitas de interes—, pero en este caso podemosver que da igual coger una u otra barra por la simetrıa de este problema):
A
C
PFmuelle
fA
fC x
fC y
2 m
0,5 m 0,5 m
+
x
y
←
←
←
←
←
FIGURA P3b: Resolucion del aparta-do (b). Barra AC.
De donde planteamos las siguientes ecuaciones de equilibrio:∑
Fx = 0 :
Fmuelle − φCx = 0, (P3.5)∑
Fy = 0 :
−P + φA + φCy = 0, (P3.6)∑
MCz = 0 :
Fmuelle 1 + P 0,5 − φA 1 = 0. (P3.7)
Y sustituyendo valores hallados anteriormente:
φCx = = 3kp, (P3.8)
φCy = 0, (P3.9)
3 +1
2P − P = 0, (P3.10)
hallando de la ec. (P3.10) que P = 6 kp. Solo nos hizo falta la ecuacion demomentos para hallar la incognita del peso de las barras, aunque de paso hemoscalculado la reaccion en la articulacion interna C: ~φAC
C = (−3, 0) kp = −~φCBC .
DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
150 Estatica de los sistemas de solidos rıgidos
(c) Ahora el cable es una ligadura (interna) que influye en la estabilidad y gradosde libertad del sistema, a diferencia del muelle en la situacion anterior, que noinfluıa en la estabilidad ni en los grados de libertad del sistema:
GE = 3 − CE = 3 − [1(A) + 1(B)] = 1.Sistema inestable externamente o de sustentacion (igual que antes).
GI = 3N − 3 − CI = 3 × 2 − 3 − [2(C) + 1(cable AB)] = 0.Sistema isostatico internamente o de constitucion.
G = GE + GI = 1.Sistema globalmente inestable (pero con un grado de libertad menos queantes).
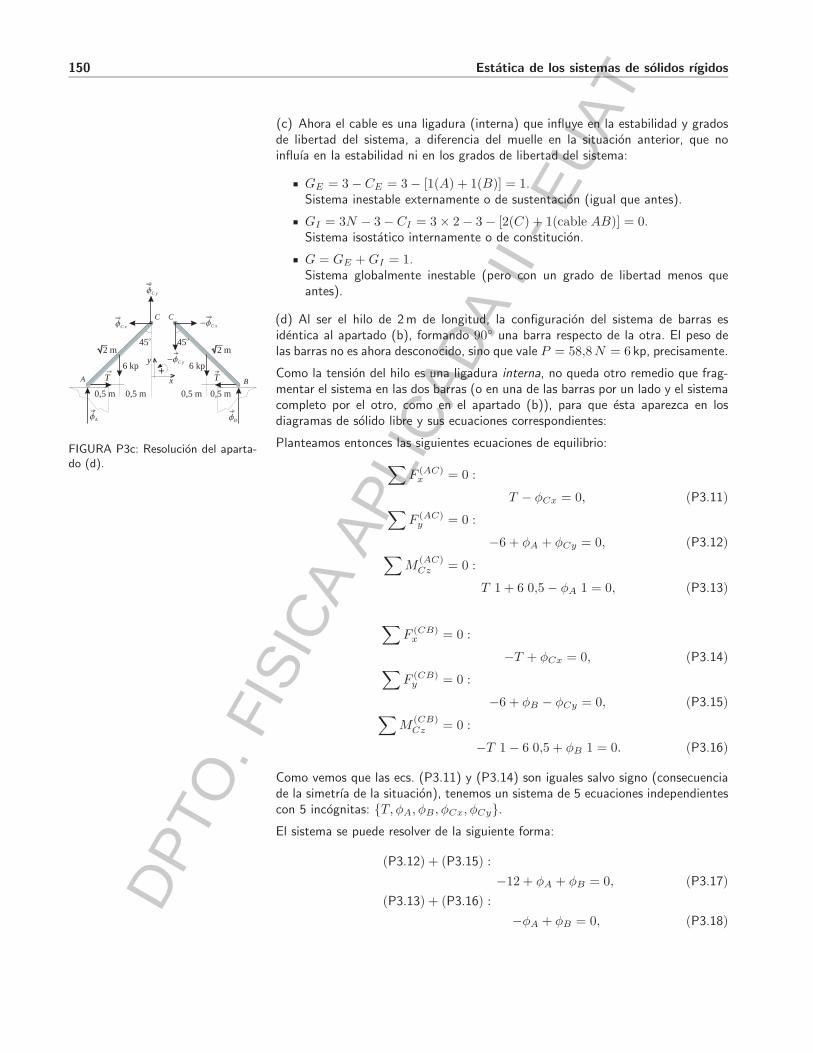
(d) Al ser el hilo de 2 m de longitud, la configuracion del sistema de barras esidentica al apartado (b), formando 90◦ una barra respecto de la otra. El peso delas barras no es ahora desconocido, sino que vale P = 58,8N = 6 kp, precisamente.
Como la tension del hilo es una ligadura interna, no queda otro remedio que frag-mentar el sistema en las dos barras (o en una de las barras por un lado y el sistemacompleto por el otro, como en el apartado (b)), para que esta aparezca en losdiagramas de solido libre y sus ecuaciones correspondientes:
A B
C C
6 kp 6 kpT T
fA fB
2 m 2 m
0,5 m 0,5 m0,5 m 0,5 m
45o 45o
+
x
y
fC x
←
←
←
-fC x
←
←
←
fC y
←
-fC y
←
FIGURA P3c: Resolucion del aparta-do (d).
Planteamos entonces las siguientes ecuaciones de equilibrio:
∑
F (AC)x = 0 :
T − φCx = 0, (P3.11)∑
F (AC)y = 0 :
−6 + φA + φCy = 0, (P3.12)∑
M(AC)Cz = 0 :
T 1 + 6 0,5 − φA 1 = 0, (P3.13)
∑
F (CB)x = 0 :
−T + φCx = 0, (P3.14)∑
F (CB)y = 0 :
−6 + φB − φCy = 0, (P3.15)∑
M(CB)Cz = 0 :
−T 1 − 6 0,5 + φB 1 = 0. (P3.16)
Como vemos que las ecs. (P3.11) y (P3.14) son iguales salvo signo (consecuenciade la simetrıa de la situacion), tenemos un sistema de 5 ecuaciones independientescon 5 incognitas: {T, φA, φB , φCx, φCy}.El sistema se puede resolver de la siguiente forma:
(P3.12) + (P3.15) :
−12 + φA + φB = 0, (P3.17)
(P3.13) + (P3.16) :
−φA + φB = 0, (P3.18)
DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
5.4 Grados de libertad y estabilidad de un sistema de solidos rıgidos 151
y de la ec. (P3.18) deducimos que φA = φB (logico por la simetrıa; tambien sededucıa en el apartado (b), pero de las ecuaciones del sistema completo); sustitu-yendo en (P3.17) obtenemos φA = φB = 6 kp, que sustituido en (P3.13) o (P3.16)nos determina por fin la tension del cable:
T = 3kp, (P3.19)
que vemos coincide con la fuerza que en el apartado (b) ejercıa el muelle en cadabarra. Esto era de esperar porque, comparando ambos apartados, los pesos de lasbarras son iguales y su configuracion tambien, aunque antes fuera mantenida porun muelle y ahora lo sea por un hilo.
De paso, y para terminar, obtenemos de las ecs. (P3.11) y (P3.12) o (P3.15), la
reaccion en la articulacion interna C: ~φACC = (−3, 0) kp = −~φCB
C , como en elapartado (b), logicamente.
PROBLEMA RESUELTO 5.4:
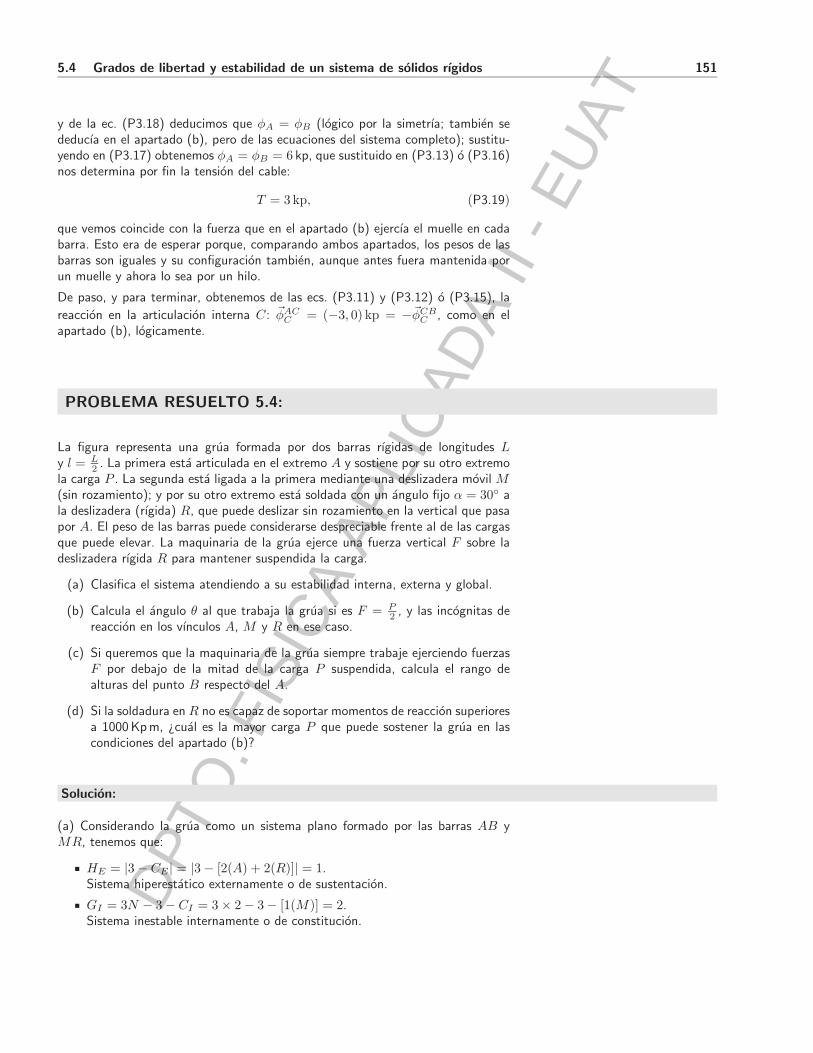
La figura representa una grua formada por dos barras rıgidas de longitudes Ly l = L
2 . La primera esta articulada en el extremo A y sostiene por su otro extremola carga P . La segunda esta ligada a la primera mediante una deslizadera movil M(sin rozamiento); y por su otro extremo esta soldada con un angulo fijo α = 30◦ ala deslizadera (rıgida) R, que puede deslizar sin rozamiento en la vertical que pasapor A. El peso de las barras puede considerarse despreciable frente al de las cargasque puede elevar. La maquinaria de la grua ejerce una fuerza vertical F sobre ladeslizadera rıgida R para mantener suspendida la carga.
(a) Clasifica el sistema atendiendo a su estabilidad interna, externa y global.
(b) Calcula el angulo θ al que trabaja la grua si es F = P2 , y las incognitas de
reaccion en los vınculos A, M y R en ese caso.
(c) Si queremos que la maquinaria de la grua siempre trabaje ejerciendo fuerzasF por debajo de la mitad de la carga P suspendida, calcula el rango dealturas del punto B respecto del A.
(d) Si la soldadura en R no es capaz de soportar momentos de reaccion superioresa 1000 Kpm, ¿cual es la mayor carga P que puede sostener la grua en lascondiciones del apartado (b)?
Solucion:
(a) Considerando la grua como un sistema plano formado por las barras AB yMR, tenemos que:
HE = |3 − CE | = |3 − [2(A) + 2(R)]| = 1.Sistema hiperestatico externamente o de sustentacion.
GI = 3N − 3 − CI = 3 × 2 − 3 − [1(M)] = 2.Sistema inestable internamente o de constitucion.

DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
152 Estatica de los sistemas de solidos rıgidos
PROBLEMA RESUELTO 5.4
P
B
M
R
A
q
aL
l
F←
Por inspeccion, G = 1.Sistema globalmente inestable.
(b) Empleamos el metodo de fragmentacion (vease la fig. P4a):
B
M
A
q
q
L
P←
fM
←
fA x
←
fA y
← M
R
q
αl
MR
←F
←
fR
←
-fM
←
FIGURA P4a: Resolucion del aparta-do (b).
Se ha tenido en cuenta que la deslizadera movil M es una ligadura interna, porlo que en aplicacion de la tercera ley de Newton genera en M dos fuerzas igua-les, de sentido contrario, aplicadas en cada uno de los cuerpos; y que estas sonperpendiculares a la guıa (y eje) de la barra AB.
Las incognitas de reaccion vincular son:
barra AB:
• articulacion externa en A: ~φA = (φAx, φAy)
• deslizadera movil en M : ~φM = (φM cos θ, φM sen θ)
barra MR:
• deslizadera movil en M: −~φM
• deslizadera rıgida en R: ~φR = (φRx, 0), ~MR = (0, 0,MR).
Observese que tanto ~φM como ~φR son perpendiculares a las respectivas guıas porlas que deslizan las correderas.
Las ecuaciones de equilibrio para la barra AB, eligiendo los ejes horizontal y verticalcomo x e y respectivamente, y tomando momentos en A, resultan:
φAx − φM cos θ = 0, (P4.1)
φAy − φM sen θ − P = 0, (P4.2)
P L sen θ + φM AM = 0.. (P4.3)
AM se halla geometricamente del triangulo△
AMR, al igualar su altura horizontalcalculada por un lado como cateto opuesto al angulo α, y por otro como catetoopuesto al angulo θ:
l sen α = AM sen θ; (P4.4)
AM =sen α
sen θl. (P4.5)

DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
5.4 Grados de libertad y estabilidad de un sistema de solidos rıgidos 153
Las ecuaciones de equilibrio para la barra MR, con los ejes coordenados anterioresy tomando momentos en el punto M , son:
φM cos θ + φR = 0, (P4.6)
F + φM sen θ = 0, (P4.7)
MR + F l sen θ − φR l cos θ = 0. (P4.8)
Sustituyendo los valores conocidos, l = L2 , α = 30◦ (sen 30◦ = 1
2 , cos 30◦ =√
32 )
y F = P2 (para este apartado (b)), nos quedan las siguientes ecuaciones, teniendo
en cuenta que ahora serıa AM = 14 sen θ
L:
φAx − φM cos θ = 0, (P4.9)
φAy − φM sen θ − P = 0, (P4.10)
P L sen θ + φM
1
4 sen θL = 0, (P4.11)
φM cos θ + φR = 0, (P4.12)
1
2P + φM sen θ = 0, (P4.13)
MR +1
2P L
1
4− φR L
√3
4= 0. (P4.14)
Tenemos ası 6 ecuaciones con 6 incognitas, justo las que nos piden en este apartado:θ, φAx, φAy, φM , φR, MR; la primera incognita es de configuracion y las otras5 de reaccion; P y L son datos parametricos.
Resolvemos de la siguiente forma:
(i) De la ec. (P4.13): φM = − 12 sen θ
P ;
(ii) sustituyendo en la ec. (P4.11): P L sen θ − 12 sen θ
P 14 sen θ
L = 0;
(iii) de donde resulta sen3 θ = 18 y θ = 30◦(= α).
(iv) Sustituyendo en (I) resulta: φM = −P (su sentido es opuesto al dibujado enambas barras);
(v) sustituyendo (III) y (IV) en (P4.9) resulta: φAx = −√
32 P (sentido opuesto);
(vi) sustituyendo (III) y (IV) en (P4.10) resulta: φAy = 12P ;
(vii) sustituyendo (III) y (IV) en (P4.12) resulta: φR =√
32 P ;
(viii) sustituyendo (III) y (IV) en (P4.14) [la ec. (P4.13) da el mismo resultado que(IV)] resulta: MR = 1
4P L.
Si queremos expresar las incognitas de fuerza de reaccion en forma vectorial, en
los ejes elegidos resultarıa lo siguiente: ~φA =(
−√
32 P, 1
2P)
; ~φR =(√
32 P, 0
)
;
~MR =(
0, 0, 14PL
)
; ~φABM =
(√3
2 P, 12P)
= −~φMRM .
(c) La altura del punto B respecto del A viene dada por hAB = L cos θ.
Usando las ecs. (P4.3), (P4.5) y (P4.7), pero sustituyendoles los datos l = L2 y
α = 30◦, aunque no F = P2 , pues ahora solo queremos que F ≤ P
2 , nos queda:
(i) De (P4.7): φM = − 1sen θ
F ;
(ii) sustituyendo en (P4.3)+(P4.5): P L sen θ − 1sen θ
F 14 sen θ
L = 0;

DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
154 Estatica de los sistemas de solidos rıgidos
(iii) resulta para θ entonces que: sen3 θ = 14
FP
.
Finalmente, imponemos que F ≤ P2 ⇔ F
P≤ 2 ⇒ sen3 θ ≤ 1
8 ⇒ sen θ ≤ 12 ⇒
θ ≤ 30◦ ⇒ cos θ ≥√
32 ⇒ hAB ≥
√3
2 L, de donde nos ha salido el rango de valo-res de hAB que buscabamos (evidentemente tambien esta acotada superiormente:hAB < L).
(d) Si queremos que la grua funcione sin que se rompa la soldadura que hay en R,y si F = 1
2P , entonces |MR| ≤ Mmax. En ese caso, como siguen siendo validoslos resultados del apartado (b), MR = 1
4P L, y la desigualdad se traduce en14P L ≤ Mmax ⇔ P ≤ 4Mmax
L.
Para Mmax = 1000 kp m resulta finalmente P ≤ 4000L
kp (si L esta en metros) parael rango de cargas que puede sostener la grua. Se observa que cuanto mas largosea el brazo de la grua, L, menor sera el rango permitido de cargas que se puedenelevar.
PROBLEMA RESUELTO 5.5:
En el sistema de solidos rıgidos que se muestra en la figura, las barras AB y CDson identicas, de longitud L y de peso P . El peso de la barra BC es, en cambio,despreciable. En A hay un apoyo simple, en B y C articulaciones, y en D unempotramiento.
(a) Clasifica el sistema atendiendo a su estabilidad interna, externa y global.
En el punto medio de la barra AB se aplica una fuerza ~F que forma un angulo de60◦ con la horizontal. Determina:
(b) El modulo de ~F para que la situacion mostrada en la figura sea de equilibrio.
(c) Las fuerzas de reaccion vincular en A y en D ejercidas sobre las barras, y elmomento del empotramiento en D en esta situacion de equilibrio.
(d) Las fuerzas de reaccion vincular ejercidas en B y en C sobre la barra BC enesta situacion de equilibrio.
PROBLEMA RESUELTO 5.5
30o
60o
30o
B C
AD
F←
Solucion:
(a) Teniendo en cuenta que la barra BC es doblemente articulada y de peso des-preciable, se puede considerar como un vınculo tipo biela, en vez de un tercersolido del sistema. Entonces resulta que el sistema de dos solidos (barras AB yCD) tiene:

DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
5.4 Grados de libertad y estabilidad de un sistema de solidos rıgidos 155
HE = |3 − [1(A) + 3(D)]| = 1, es hiperestatico de sustentacion o externo.
GI = 3×2−3− [1(biela BC)] = 2, es mecanismo de constitucion o interno.
G = GE + GI = 1, es mecanismo globalmente.
(b) Como el sistema es un mecanismo con un grado de libertad, es natural que nospregunten por el valor de una fuerza activa para que se mantenga la configuracion(en equilibrio) con el valor del grado de libertad que indique la figura.
Y si esta el sistema en equilibrio, podemos usar el metodo de fragmentacion paragenerar ecuaciones de fuerza de donde hallar el modulo F de la fuerza activa —sudireccion viene dada por la figura: 60◦ con la horizontal—.
Si tomamos como fragmento la barra AB, solo con sus 3 ecuaciones de equilibriopodremos hallar F y dos incognitas de reaccion, la del apoyo en A y la de labiela BC en B:
30o30o
30o
30o
B
A
G
F←
P←
fB
biela←
fA
←y
x
+
FIGURA P5a: Resolucion del aparta-do (b).
Teniendo en cuenta la fig. P5a, ~F = (F cos 60◦, F sen 60◦), y quedan las siguientesecuaciones de equilibrio:
∑
Fx = 0 :
F cos 60◦ − φbielaB = 0, (P5.1)
∑
Fy = 0 :
F sen 60◦ − P + φA = 0, (P5.2)∑
MAz = 0 :
F (L2 sen 30◦) − P (L
2 cos 30◦) +
φbielaB (L sen 30◦) = 0. (P5.3)
Sustituyendo valores conocidos (P se supone que es un parametro) resulta:
F1
2− φbiela
B = 0, (P5.4)
F
√3
2− P + φA = 0, (P5.5)
F1
4L − P
√3
4L + φbiela
B
1
2L = 0, (P5.6)
es decir, 3 ecuaciones con 3 incognitas: F , φbielaB y φA. Las soluciones son las
siguientes:
F =
√3
2P, (P5.7)
φbielaB =
√3
4P, (P5.8)
φA =1
4P. (P5.9)
Y la respuesta a este apartado (b) es F =√
32 P .
(c) La reaccion en A, φA, ya la hemos hallado en el anterior apartado, de modo
que la fuerza de reaccion en forma vectorial queda ~φA = (0, P4 ). Y para hallar la
fuerza de reaccion y el momento de reaccion en el empotramiento D necesitamos

DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
156 Estatica de los sistemas de solidos rıgidos
mas ecuaciones de equilibrio, que van a ser las del fragmento barra CD (tam-bien valdrıan las del sistema completo, pero en este caso tienen una complicacionanadida: desconocemos la longitud de la biela BC):
De donde:∑
Fx = 0 :
φbielaB − φDx = 0, (P5.10)
∑
Fy = 0 :
−P + φDy = 0, (P5.11)∑
MDz = 0 :
P (L2 cos 30◦) − φbiela
B (Lsen 30◦) +
µemp D = 0. (P5.12)
Sustituyendo valores conocidos (del apartado anterior, φbielaB =
√3
4 P ):
30o
C
G
D
P←
- fB
biela←
fD y
←
mempD←
fD x
←
y
x
+
FIGURA P5b: Resolucion del aparta-do (c).
√3
4P − φDx = 0, (P5.13)
−P + φDy = 0, (P5.14)
P
√3
4L −
√3
4P12L + µemp D = 0, (P5.15)
de donde obtenemos:
φDx =
√3
4P, (P5.16)
φDy = P, (P5.17)
µemp D = −√
3
8PL. (P5.18)
Y vectorialmente: ~φD = (−√
34 P, P ), ~µemp D = (0, 0,−
√3
8 PL).
(d) Las fuerzas de reaccion en B y C sobre la barra BC son las fuerzas de reaccionde la biela BC, cuyo modulo comun hallamos en el apartado (b), pero considerandosu efecto sobre la propia biela BC, que viene dado por el Principio de Accion yReaccion:
~φBCB = −~φAB
B = −~φbielaB =
(√3
4P, 0
)
, (P5.19)
~φBCC = −~φCD
C = −(−~φbielaB ) =
(
−√
3
4P, 0
)
. (P5.20)
PROBLEMA RESUELTO 5.6:
La barra de la figura, de peso 10 N y longitud L, se encuentra apoyada sin roza-miento en el punto A, forma 30◦ con la horizontal y esta sometida a la accion de

DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
5.4 Grados de libertad y estabilidad de un sistema de solidos rıgidos 157
una fuerza horizontal F = 6√
3 N en su punto medio. El extremo opuesto B seencuentra articulado a un bloque homogeneo de peso P que se apoya sobre unasuperficie con rozamiento. El coeficiente de rozamiento estatico entre el bloque yel suelo es µ = 1.
(a) Suponiendo que el sistema se encuentra en equilibrio, determina:
1. Los vectores fuerza de reaccion vincular que actuan sobre la barra enlos puntos A y B.
2. El vector fuerza de reaccion vincular que actua en el apoyo con roza-miento y su punto de aplicacion, en funcion del peso P del bloque.
(b) Calcula el rango de valores de P para el cual el sistema se encuentra enequilibrio.
30ºA
B 2 m
1 mF
←
PROBLEMA RESUELTO 5.6
Solucion:
(a) En el equilibrio aplicamos el metodo de fragmentacion para generar ecuacionesde fuerza, eligiendo como fragmentos la barra AB por un lado (para que aparezcanlas incognitas de reaccion de la articulacion interna B que nos piden) y, por otrolado, el sistema completo barra-bloque:
∑
Fx = 0 :
F − φBx = 0, (P6.1)∑
Fy = 0 :
−PAB + φBy + φA = 0, (P6.2)∑
MBz = 0 :
−φA(L cos 30◦) + PAB
(
L2 cos 30◦
)
+
F(
L2 sen 30◦
)
= 0, (P6.3)
∑
Fx = 0 :
F − FR = 0, (P6.4)∑
Fy = 0 :
−P + N − PAB + φA = 0, (P6.5)∑
MOz = 0 :
−F 12 + PAB
(
L2 cos 30◦ + 1
)
+
φA(L cos 30◦ + 1) + Nx = 0. (P6.6)

DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
158 Estatica de los sistemas de solidos rıgidos
Tambien podrıamos haber elegido el bloque como segundo fragmento. Veremosque una ventaja de nuestra eleccion es que pueden resolverse por un lado las3 primeras ecuaciones para obtener las incognitas que nos piden en (a.1), y porotro las 3 ultimas para obtener las incognitas de (a.2).
30ºA
B
GAB
L
30ºA
x
2 m
1 mGAB G
O
L
y
x+
fA
←
PAB
←
FR
←
N←
P←
F←fA
←
PAB
←F
←
fB y
←
fB x
←
FIGURA P6a: Resolucion del aparta-do (a).
Sustituyendo valores conocidos, teniendo en cuenta que L, la longitud de la ba-rra AB, puede hallarse de la fig. (P6a) (al ser L sen 30◦ = 1m, es L = 2m), ysimplificando, resulta:
6√
3 − φBx = 0, (P6.7)
−10 + φBy + φA = 0, (P6.8)
−φA +10
2+
6
2= 0, (P6.9)
6√
3 − FR = 0, (P6.10)
−P + N − 10 + φA = 0, (P6.11)
−6√
31
2+ 10(
√3
2+ 1)−
φA(√
3 + 1) + N x = 0. (P6.12)
Es un sistema de 6 ecuaciones y 6 incognitas: φBx, φBy, φA, FR, N y x (P esun dato). De la ec. (P6.9): φA = 8N. Sustituyendo en la ec. (P6.8): φBy = 2N.De la ec. (P6.7): φBx = 6
√3 N. Vectorialmente, la solucion del apartado (a.1)
es: ~φA = (0, 8) N, ~φABB = (−6
√3, 2) N. De la ec. (P6.10): FR = 6
√3 N. De la
ec. (P6.11): N = 2 + P N. De la ec. (P6.12): x = 6√
3−22+P
m. Vectorialmente, la
solucion del apartado (a.2) es: ~φsuelo = (−6√
3, 2 + P )N.
(b) Hay equilibrio mientras se cumplan las siguientes condiciones:
FR ≤ µN (no deslizamiento).
−1 ≤ x ≤ 1 (no vuelco).
La primera condicion implica 6√
3 ≤ 1(2 + P ) ⇒ P ≥ 6√
3 − 2 = 8,39 N. Lasegunda condicion equivale a dos condiciones:
x ≥ −1 ⇒ P ≥ −6√
3 N la cual no nos anade nada porque se cumple alpresuponer P ≥ 0.
x ≤ 1 ⇒ P ≥ 6√
3 − 2 = 6,39 N.
Como el mayor de los dos mınimos de P es 8,39 N, el rango de valores de P quemantiene el equilibrio sera finalmente: P ≥ 8,39 N.
5.5. Fragmentacion interna del solido rıgido: Ac-
ciones interiores sobre una seccion
En esta seccion nuestro objetivo es determinar la relacion que existe entrelas fuerzas exteriores (activas y de reaccion vincular) que actuan sobre un solido
DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
5.5 Fragmentacion interna del solido rıgido: Acciones interiores sobre una seccion 159
rıgido y las fuerzas internas que se producen en el (y que lo mantienen ıntegroe indeformable). Se trata de averiguar como responden las coacciones internasque aseguran la rigidez del solido frente a las fuerzas externas aplicadas.
Para ello se utiliza el metodo de fragmentacion introducido en la seccion 5.3de la siguiente manera: (I) Se calculan todas las fuerzas exteriores (tanto activascomo de reaccion vincular) que actuan sobre el solido rıgido. (II) Se fragmentael solido rıgido mediante un plano imaginario de seccion S en dos fragmentos.Cada uno de ellos se considera un solido rıgido “soldado” al otro fragmento porla seccion S.
Se llaman esfuerzos internos a las fuerzas entre los fragmentos imaginarios esfuerzos internos
de un solido rıgido.
Se llama metodo de las secciones al metodo de fragmentacion aplicado al metodo de las secciones
calculo de los esfuerzos internos.
El metodo de las secciones es el punto de partida para el estudio de laElasticidad y la Resistencia de Materiales, donde se calculan las deformacionesy tensiones internas que sufren los solidos reales sujetos a las fuerzas exteriores.
El metodo de las secciones no sirve para hallar ciertas fuerzas internas queaparecen en los materiales rıgidos pretensionados. En estos materiales se intro-duce una tension interna durante su fabricacion con objeto de que soporte mejorciertas cargas exteriores. Estos materiales son frecuentes en la construccion.
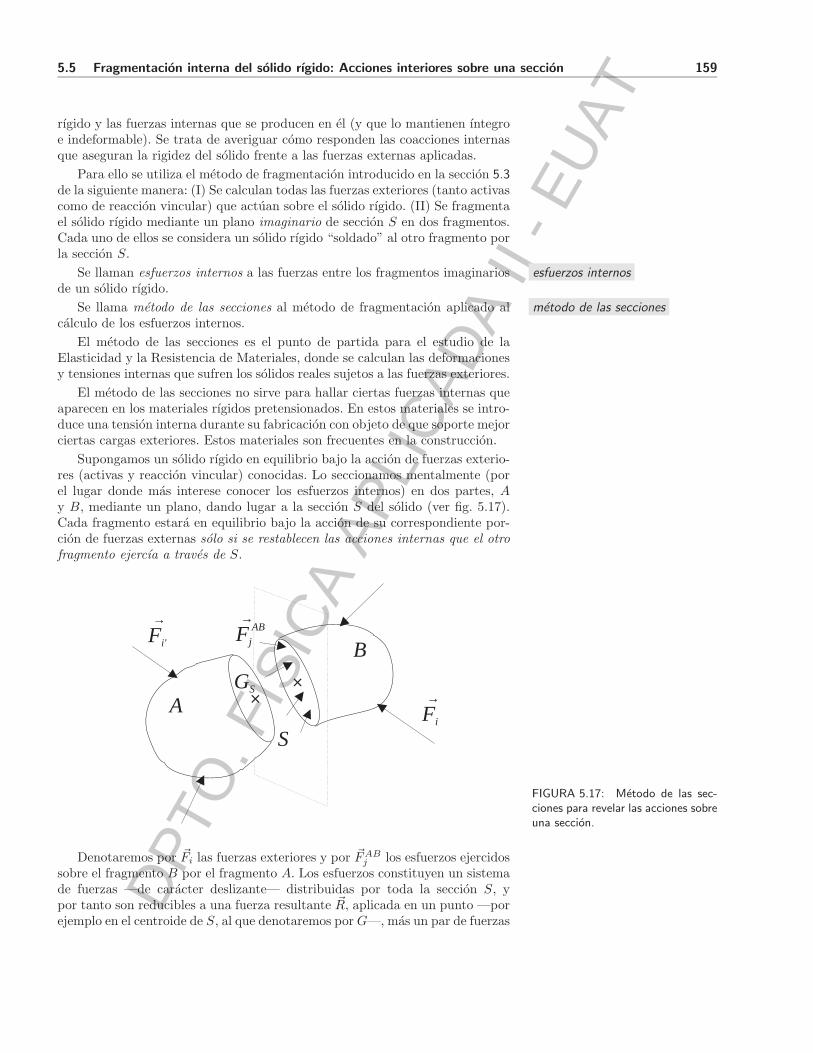
Supongamos un solido rıgido en equilibrio bajo la accion de fuerzas exterio-res (activas y reaccion vincular) conocidas. Lo seccionamos mentalmente (porel lugar donde mas interese conocer los esfuerzos internos) en dos partes, Ay B, mediante un plano, dando lugar a la seccion S del solido (ver fig. 5.17).Cada fragmento estara en equilibrio bajo la accion de su correspondiente por-cion de fuerzas externas solo si se restablecen las acciones internas que el otro
fragmento ejercıa a traves de S.
A
B
+
+GS
S
←Fi'
←Fi
←Fj
AB
FIGURA 5.17: Metodo de las sec-ciones para revelar las acciones sobreuna seccion.
Denotaremos por ~Fi las fuerzas exteriores y por ~FABj los esfuerzos ejercidos
sobre el fragmento B por el fragmento A. Los esfuerzos constituyen un sistemade fuerzas —de caracter deslizante— distribuidas por toda la seccion S, ypor tanto son reducibles a una fuerza resultante ~R, aplicada en un punto —porejemplo en el centroide de S, al que denotaremos por G—, mas un par de fuerzas

DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
160 Estatica de los sistemas de solidos rıgidos
de momento ~M igual al momento en ese punto del sistema de fuerzas ~FABi :
~R =∑
j∈S
~FABj , (5.15)
~M =∑
j∈S
~MG(~FABj ). (5.16)
Consideraremos que ~R y ~M son las incognitas de reaccion que sustituyen a una“soldadura” entre A y B. Llamaremos acciones interiores sobre la seccion S alacciones interiores sobre la seccion
par {~R, ~M}.Nuestro objetivo es escribir estas incognitas en funcion de las fuerzas exte-
riores (activas y de reaccion vincular) —que suponemos conocidas—, usandolas ecuaciones de equilibrio que nos proporciona el metodo de fragmentacion.
En particular, usaremos las ecuaciones de equilibrio de B:
∑
i∈B
~Fi +∑
j∈S
~FABj = ~0, (5.17)
∑
i∈B
~MG(~Fi) +∑
j∈S
~MG(~FABj ) = ~0, (5.18)
y las ecuaciones de equilibrio del sistema completo (A + B):
∑
k∈A
~Fk +∑
i∈B
~Fi = ~0, (5.19)
∑
k∈A
~MG(~Fk) +∑
i∈B
~MG(~Fi) = ~0. (5.20)
De las ecs. (5.15) y (5.17), y de las ecs. (5.16) y (5.18) deducimos, respectiva-mente, que:
~R = −∑
i∈B
~Fi, (5.21)
~M = −∑
i∈B
~MG(~Fi), (5.22)
que nos permiten despejar las fuerzas y momentos exteriores sobre B en funcionde las fuerzas y momentos exteriores sobre A. Introduciendo estos resultadosen las ecs. (5.21) y (5.22), obtenemos
~R =∑
k∈A
~Fk, (5.23)
~M =∑
k∈A
~MG(~Fk). (5.24)
Por tanto, las acciones interiores sobre una seccion cualquiera del solido rıgido,
considerada como seccion extrema de una de las partes, es equivalente al sistema
de fuerzas externas aplicadas sobre la otra parte.Para terminar, conviene conocer la terminologıa que se usa en Elasticidad y
Resistencia de Materiales. Cuando se descomponen las acciones interiores sobrela seccion S segun un eje normal a S, y en el plano tangente a S.
Se llama esfuerzo axial o esfuerzo de traccion-compresion, y se denotaesfuerzo axial
DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
5.5 Fragmentacion interna del solido rıgido: Acciones interiores sobre una seccion 161
B
+GS
←Fin
t2
t1←MS
←Mf
←Mτ
←RS
←Q
←N
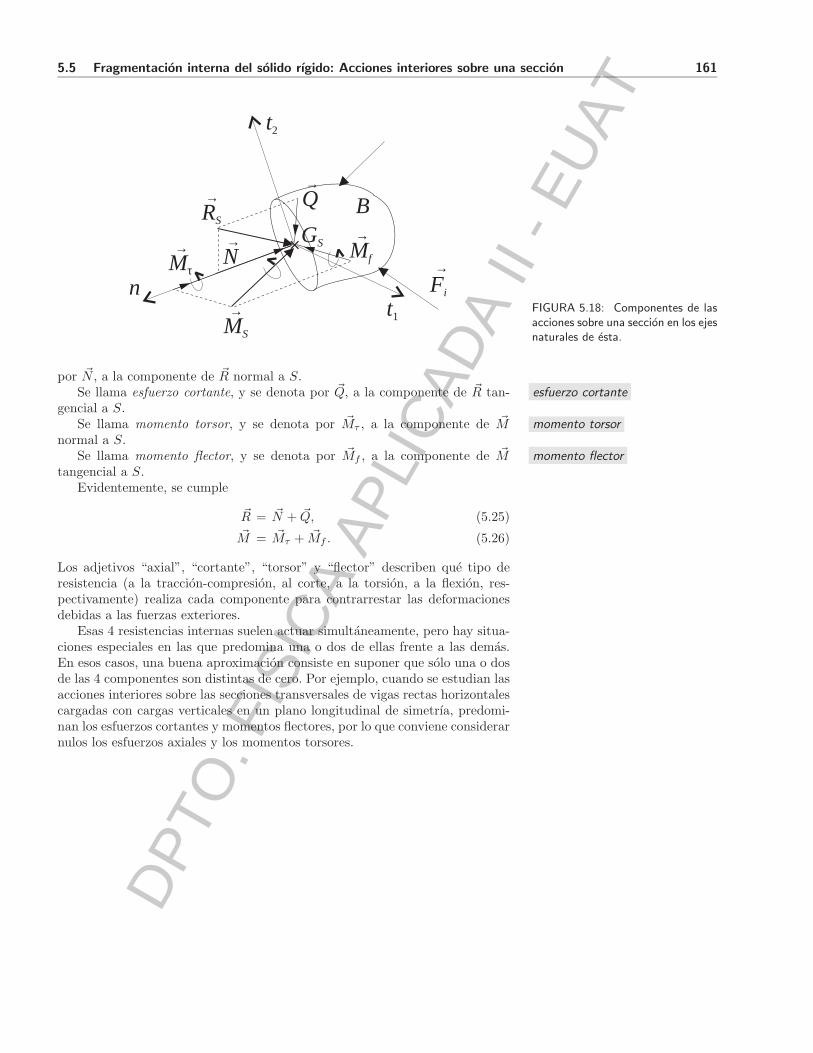
FIGURA 5.18: Componentes de lasacciones sobre una seccion en los ejesnaturales de esta.
por ~N , a la componente de ~R normal a S.Se llama esfuerzo cortante, y se denota por ~Q, a la componente de ~R tan- esfuerzo cortante
gencial a S.Se llama momento torsor, y se denota por ~Mτ , a la componente de ~M momento torsor
normal a S.Se llama momento flector, y se denota por ~Mf , a la componente de ~M momento flector
tangencial a S.Evidentemente, se cumple
~R = ~N + ~Q, (5.25)
~M = ~Mτ + ~Mf . (5.26)
Los adjetivos “axial”, “cortante”, “torsor” y “flector” describen que tipo deresistencia (a la traccion-compresion, al corte, a la torsion, a la flexion, res-pectivamente) realiza cada componente para contrarrestar las deformacionesdebidas a las fuerzas exteriores.
Esas 4 resistencias internas suelen actuar simultaneamente, pero hay situa-ciones especiales en las que predomina una o dos de ellas frente a las demas.En esos casos, una buena aproximacion consiste en suponer que solo una o dosde las 4 componentes son distintas de cero. Por ejemplo, cuando se estudian lasacciones interiores sobre las secciones transversales de vigas rectas horizontalescargadas con cargas verticales en un plano longitudinal de simetrıa, predomi-nan los esfuerzos cortantes y momentos flectores, por lo que conviene considerarnulos los esfuerzos axiales y los momentos torsores.

DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
162 Estatica de los sistemas de solidos rıgidos
Problemas propuestos
5.1. En la figura se muestra un sistema de solidos rıgidosformado por:
Un bloque homogeneo triangular de peso 3 N, arti-culado en los puntos A y C, y que en el vertice Bsufre la accion de una fuerza ~F que forma 53◦ con lahorizontal.
Una barra homogenea de 1 N de peso, articulada enel punto C y apoyada sin rozamiento en el punto D.
(a) Clasifica el sistema atendiendo a su estabilidad inter-na, externa y global.
(b) Calcula el modulo de la fuerza ~F para que el sistemase encuentre en equilibrio con la configuracion de la figura.
(c) Calcula las fuerzas de reaccion vincular en A, C y D,para la situacion anterior.
Datos adicionales: sen 53◦ ≈ 45 ; cos 53◦ ≈ 3
5 .
53o
BC
A D
F←
6 m
3 m
PROBLEMA 5.1
5.2. El sistema de solidos que se muestra en la figuraesta formado por 3 barras homogeneas. En A, B y D exis-ten articulaciones mientras que en C hay un empotramientoo soldadura. Tan solo la barra BC posee masa no despre-ciable, de valor 103 kg. En el punto medio de la barra CDse aplica una fuerza puntual horizontal de modulo F .
(a) Clasifica el sistema atendiendo a su estabilidad inter-na, externa y global.
(b) Determina las fuerzas de reaccion vincular en B y en Dque se ejercen sobre el sistema de solidos, en funcion de F .
(c) Determina la fuerza que la barra AB ejerce sobrela BC y la fuerza que la barra CD ejerce sobre la BC, enfuncion de F .
(d) Determina el momento en el empotramiento sufridopor la barra BC, en funcion de F .
Se sabe que el modulo de la reaccion en la articulacion en Bpuede ser, como maximo, 2×104 N y que el empotramientose rompe si el modulo del momento en el vınculo supera elvalor 3 × 103 N m. Con estos condicionantes,
(e) determina el valor maximo de la fuerza F que puedeaplicarse a la barra CD.
A
B
C
D
4 m
4 m
15o
F←
PROBLEMA 5.2
5.3. La grua de la figura consta de un mastil vertical,de peso de modulo P = 104 N, y dos brazos horizonta-les, FB′ y BD, de pesos respectivos P1 = 2 × 103 N yP2 = 5× 103 N, siendo despreciables los grosores tanto delmastil como de los brazos. El mastil vertical esta empotra-do en su extremo A, mientras que los brazos horizontalesestan unidos al mastil mediante articulaciones (B y B′) ycables tensos (C ′E y CD). El contrapeso de la grua situa-do en el punto E es de modulo Q1 = 104 N. Si la cargaque levanta la grua es de modulo Q2 = 1,2 × 104 N,
(a) clasifica el sistema de solidos rıgidos constituido por lagrua atendiendo a su estabilidad externa, interna y global.
(b) calcula la fuerza y momento de reaccion vincular en elempotramiento A.
(c) calcula la tension del cable CD y la reaccion de laarticulacion B sobre el brazo BD.

DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
Problemas propuestos 163
PROBLEMA 5.3
5.4. Dos piezas de maquina estan conectadas por un pa-sador en el punto E, como se muestra en la figura. El pa-sador esta sujeto a la pieza CD y desliza sin rozamientoen una ranura existente en la pieza AB. Sobre CD se apli-ca un par de fuerzas de momento ~M1 = 150~k N m. En lospuntos B y D existen articulaciones. La pieza AB tienelongitud LAB = 6m y peso PAB = 20 N, mientras que lapieza CD tiene longitud LCD = 8m y peso PCD = 50N.La distancia BD es h = 3m y el angulo que forma CDcon la horizontal, α, es 30◦.
(a) Clasifica el sistema segun su estabilidad interna, ex-terna y global.
(b) Halla el momento ~M2 del par que habrıa que aplicaren la pieza AB para que el sistema estuviera en equilibrio.
(c) En el caso de que apliquemos dicho par, halla las fuer-zas de reaccion sobre las barras en los puntos B y D, y lafuerza de reaccion en E sobre la barra AB.
A
C
E
D
B
a=30o
h
M2
M1
PROBLEMA 5.4
5.5. Un tablon AB, homogeneo, de peso P1 = 150 N ylongitud L1 = 5m, se apoya sobre el suelo y sobre eltablon CD, como se indica en la figura. La distancia CBes 1 m, el coeficiente de rozamiento estatico del apoyo deltablon AB con el suelo es µ = 0,8 y el rozamiento esdespreciable en el apoyo en C. El tablon CD, homogeneo,de peso P2 = 200 N y longitud L2 = 3m, se encuentraempotrado en el punto D.
(a) ¿Esta el tablon AB en equilibrio? Justifica tu respues-ta.
(b) Halla los vectores fuerza y momento de reaccion vin-cular en el empotramiento D.
A
B
C
60o
30o D
PROBLEMA 5.5
5.6. En la figura se muestra esquematicamente un cober-tizo cuyo tejado CD (de longitud lCD = 6m y pe-so PCD = 30 kp) se apoya sobre una plataforma horizontaly sobre un paramento vertical AB (de longitud lAB = 4my peso PAB = 40 kp) empotrado en el suelo en el punto A.El apoyo en C es sin rozamiento mientras que el contactoen B tiene rozamiento con coeficiente µ. Calcula:
(a) Las fuerzas de reaccion vincular sobre la barra CD enlos puntos B y C y las reacciones sobre la barra AB en A,suponiendo que el sistema esta en equilibrio.
(b) El valor mınimo del coeficiente de rozamiento µ paraque el sistema este en equilibrio.
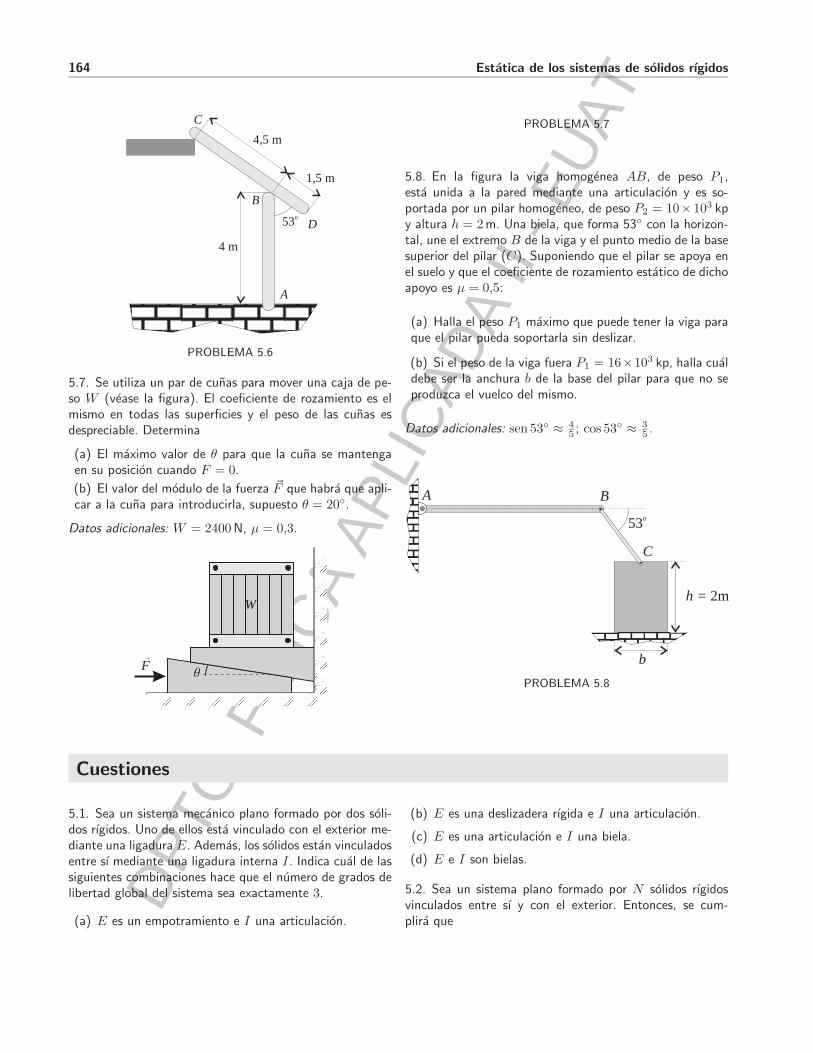
DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
164 Estatica de los sistemas de solidos rıgidos
A
B
C
53o
4 m
4,5 m
1,5 m
D
PROBLEMA 5.6
5.7. Se utiliza un par de cunas para mover una caja de pe-so W (vease la figura). El coeficiente de rozamiento es elmismo en todas las superficies y el peso de las cunas esdespreciable. Determina
(a) El maximo valor de θ para que la cuna se mantengaen su posicion cuando F = 0.
(b) El valor del modulo de la fuerza ~F que habra que apli-car a la cuna para introducirla, supuesto θ = 20◦.
Datos adicionales: W = 2400 N, µ = 0,3.
q
W
F←
PROBLEMA 5.7
5.8. En la figura la viga homogenea AB, de peso P1,esta unida a la pared mediante una articulacion y es so-portada por un pilar homogeneo, de peso P2 = 10×103 kpy altura h = 2m. Una biela, que forma 53◦ con la horizon-tal, une el extremo B de la viga y el punto medio de la basesuperior del pilar (C). Suponiendo que el pilar se apoya enel suelo y que el coeficiente de rozamiento estatico de dichoapoyo es µ = 0,5:
(a) Halla el peso P1 maximo que puede tener la viga paraque el pilar pueda soportarla sin deslizar.
(b) Si el peso de la viga fuera P1 = 16×103 kp, halla cualdebe ser la anchura b de la base del pilar para que no seproduzca el vuelco del mismo.
Datos adicionales: sen 53◦ ≈ 45 ; cos 53◦ ≈ 3
5 .
53o
A B
C
h = 2m
b
PROBLEMA 5.8
Cuestiones
5.1. Sea un sistema mecanico plano formado por dos soli-dos rıgidos. Uno de ellos esta vinculado con el exterior me-diante una ligadura E. Ademas, los solidos estan vinculadosentre sı mediante una ligadura interna I. Indica cual de lassiguientes combinaciones hace que el numero de grados delibertad global del sistema sea exactamente 3.
(a) E es un empotramiento e I una articulacion.
(b) E es una deslizadera rıgida e I una articulacion.
(c) E es una articulacion e I una biela.
(d) E e I son bielas.
5.2. Sea un sistema plano formado por N solidos rıgidosvinculados entre sı y con el exterior. Entonces, se cum-plira que
DPT
O. F
ISIC
A AP
LIC
ADA
II - E
UAT
Cuestiones 165
(a) un numero de coacciones externas mayor que 3 pue-
de contribuir a impedir los movimientos relativos entre lossolidos cuando el numero de coacciones internas sea menorque 3N − 3.
(b) un numero de coacciones externas mayor que 3 con-tribuira siempre a impedir los movimientos relativos entrelos solidos cuando el numero de coacciones internas seamenor que 3N − 3.
(c) un numero de coacciones internas mayor que 3N − 3puede contribuir a impedir el movimiento del sistema desolidos como un todo cuando el numero de coaccionesexternas sea menor que 3.
(d) un numero de coacciones internas mayor que 3N − 3contribuira siempre a impedir el movimiento del sistemade solidos como un todo cuando el numero de coaccionesexternas sea menor que 3.
5.3. Un sistema globalmente inestable
(a) tiene que ser necesariamente inestable de constitucion.
(b) tiene que ser necesariamente inestable de sustenta-cion.
(c) puede ser hiperestatico de constitucion.
(d) no puede ser hiperestatico de sustentacion.
5.4. En un sistema de solidos rıgidos que es isostatico de
sustentacion e hiperestatico de constitucion, en el que no
hay fuerzas activas interiores y sobre el que actua un siste-ma de fuerzas activas exteriores conocido,
(a) no es posible el equilibrio.
(b) en general, las ecuaciones de la Estatica, por sı so-las, permitiran resolver todas las incognitas de reaccionvincular, tanto externas como internas.
(c) en general, las ecuaciones de la Estatica, por sı solas,no permitiran resolver todas las incognitas de reaccion vin-cular internas.
(d) si se suprime una cualquiera de las coacciones internasel sistema siempre pasara a ser inestable de constitucion.
5.5. Sea un solido rıgido en equilibrio y S una seccion cual-quiera que divida a este en dos partes. Acerca de las ac-ciones que una parte transmite a la otra a traves de dichaseccion podemos afirmar que
(a) son independientes de las fuerzas externas que actuansobre el solido.
(b) el esfuerzo cortante y el momento flector son ambostangentes a la seccion S.
(c) los esfuerzos cortante y axial estan contenidos en elplano de la seccion y los momentos flector y torsor sonperpendiculares a dicho plano.
(d) son nulas, dado que suponemos que el solido esta enequilibrio.


















