Sistema operativo (herramientas teleinformáticas grupo 221120-208) UNAD
Upload
luis-zambranoCategory
view
1.192download
11description
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍA
Materia ROBÓTICA Código 299011
2012_II
ROBÓTICA
299011
PROYECTO FINAL
TUTOR
FREDDY VALDERRAMA
PRESENTADO POR
ALBERTO MEJÍA
COD 91234713
JULIO CESAR HERNANDEZ ARIAS
COD 93401434
MARINO ARAGON
JULIO CESAR OLMOS
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Diciembre/2012

ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍA
Materia ROBÓTICA Código 299011
2012_II
Contenido INTRODUCCIÓN ................................................................................................................. 4
OBJETIVO ............................................................................................................................ 6
A. Determinar y justificar la configuración mecánica adecuada para el robot a construir, incluyendo el efector final. ................................................................................. 7
B. Determinar y justificar las especificaciones de los actuadores requeridos para cada una de las articulaciones, adjuntar las hojas de datos de los mismos, y si es posible una cotización. .............................................................................................. 8
C. Determinar las medidas de los eslabones, bosquejar el volumen de trabajo estimado y el robot alcanzando las posiciones A,B y C del bosquejo de la figura 1 (resaltados en verde en la parte inferior). ........................................................................ 9
D. A partir de los actuadores escogidos, determinar ¿Cómo se enviarán las señales de mando a los actuadores para realizar los movimientos de las articulaciones?¿Que elementos son necesarios para hacer esta tarea?................. 10
E. Determinar los elementos que deben incluirse en el controlador del robot, esto se debe hacer a nivel general no se requieren planos electrónicos, mecánicos, neumáticos o hidráulicos, basta con un listado de elementos básico y un diagrama de bloques, lo más importante es justificar de acuerdo a la selección de actuadores. ......................................................................................................................... 11
F. Determinar la forma en que el controlador del robot se comunicará con el software de control instalado en un PC (el PC estará a 30 metros del robot, considere un ambiente contaminado de ruido electromagnético debido a la presencia de motores de alta potencia en el área de trabajo). Especificar y justificar la selección. ........................................................................................................ 11
G. Determinar el tipo o tipos de programación que se incluirán en el robot, justificando la selección de acuerdo a los requerimientos del problema.................. 13
H. Determinar y justificar si es necesario incluir en el robot un sistema de visión artificial (¿Cómo se manejará el problema de las variaciones en las medidas del perfil de la viga?). Si se determina que el sistema de visión artificial es necesario, se deben prever a nivel general los nuevos requerimientos a nivel de software-hardware necesario en el montaje. ................................................................ 14
CONCLUSIONES .............................................................................................................. 15
BIBLIOGRAFÍA .................................................................................................................. 16

ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍA
Materia ROBÓTICA Código 299011
2012_II
TABLA DE FIGURAS
Figura 1 Brazo robot ............................................................................................................... 7 Figura 2. Viga soldada con TIG. ......................................................................................... 7 Figura 3 ................................................................................................................................... 8
Figura 4 ................................................................................................................................... 8 Figura 5 Alcanzando la posición B ......................................................................................... 9 Figura 6 Alcanzando la posición A ......................................................................................... 9 Figura 7 Volumen de trabajo ................................................................................................. 10
Figura 8 Alcanzando la posición C ....................................................................................... 10 Figura 9 Diagrama de bloques del robot .............................................................................. 11 Figura 10 ............................................................................................................................... 12
Figura 11 Trenzado de cables ............................................................................................... 12 Figura 12 ............................................................................................................................... 13
Figura 13 Conexión del apantallamiento .............................................................................. 13

ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍA
Materia ROBÓTICA Código 299011
2012_II
INTRODUCCIÓN
Una celda robotizada de soldadura implica una inversión de miles de dólares. No
sólo es necesario invertir en el robot, sino en dispositivos de sujeción de la pieza
(más sofisticados que para soldadura manual), sistemas de seguridad y otros
periféricos.
La ventaja de la producción robotizada es que el costo directo de producción de
cada pieza será inferior que en una celda de soldadura manual. También se logra
mayor capacidad productiva, mejor calidad del producto final y se mejora la
calidad del trabajo del operario.
En general es conveniente soldar con robots cuando la cantidad de piezas iguales
a soldar a lo largo del tiempo es muy grande (miles de piezas). En esos casos el
ahorro en el costo directo de producción supera el mayor gasto de inversión inicial.
La soldadura robotizada es el uso de herramientas programables mecanizadas
(robots), con las que se lleva a cabo un proceso de Soldadura completamente
automático, tanto en la operación de soldeo como sosteniendo la pieza.
La soldadura robotizada es una aplicación relativamente nueva de la Robótica,
aunque los robots se introdujeron primero en la industria estadounidense en la
década de los 1960. El uso de robots en soldadura no despuntó hasta la década
de los 1980, cuando la industria del automóvil comenzó a usar robots
masivamente para la soldadura por puntos.
La soldadura robotizada al arco ha empezado a crecer con rapidez sólo en
período más reciente, y ya domina en torno al 20% de las aplicaciones industriales

ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍA
Materia ROBÓTICA Código 299011
2012_II
con robots. Los principales componentes de los robots de soldadura al arco son: el
manipulador o la unidad mecánica y el controlador, que actúa como "cerebro" del
robot. El manipulador es lo que hace que el robot se mueva, y el diseño de estos
sistemas pueden catalogarse en varias clases, tales como el SCARA y el robot de
coordenadas cartesianas, que usan diversos sistemas de coordenadas para dirigir
los brazos de la máquina.

ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍA
Materia ROBÓTICA Código 299011
2012_II
OBJETIVO
Diseñar y sustentar el diseño de un robot industrial que permita realizar el
ensamble de dos piezas metálicas de medidas estándar, usando los conceptos,
definiciones, y herramientas descritas en los contenidos del curso de robótica, y
mediante el aprendizaje colaborativo como metodología para realizar la labor
mencionada.

ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍA
Materia ROBÓTICA Código 299011
2012_II
DESARROLLO
A. Determinar y justificar la configuración mecánica adecuada para el
robot a construir, incluyendo el efector final.
La configuración mecánica aconsejada es la que se muestra a continuación:
Como la base del robot estará ubicada de
tal forma que el brazo forma un ángulo
recto respecto al eje de la viga a soldar no
será necesario incluir articulaciones que
giren en el eje perpendicular a la viga, solo
articulaciones de tipo R que permitan que
el efector del robot pueda aplicar la
soldadura sobre el cordón. La
configuración se puede ver en la figura 1, un
cuerpo de tipo TR y un brazo RR. La base se
eligió tipo T para poder alejar el robot de la viga y permitir el mantenimiento del
mismo.
ACTUADORES
Debido a que el robot no manipulará objetos pesados se recomienda el uso de
actuadores eléctricos para las articulaciones del mismo.
EFECTOR FINAL
Generalmente las vigas se sueldan utilizando
EBW, LBW o TW sin embargo, en este caso
supondremos una soldadura utilizando el
proceso MIG o TIG.
Se elige este proceso porque al tener una
alimentación continua de material de aporte no
será necesario detener el proceso para poner un
Figura 1 Brazo robot
Figura 2. Viga soldada con TIG.
Tomada de
http://www.weldingtipsandtricks.com

ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍA
Materia ROBÓTICA Código 299011
2012_II
electrodo nuevo en el efector del robot con la pérdida de tiempo y dinero que esto
conlleva sino que además se evita que se dañe el cordón de soldadura al tener
que parar el proceso en caso de que el electrodo se acabara antes de finalizar el
recorrido, lo que si puede pasar con electrodos normales.
B. Determinar y justificar las especificaciones de los actuadores
requeridos para cada una de las articulaciones, adjuntar las hojas de
datos de los mismos, y si es posible una cotización.
El primer actuador es el dispensador del electrodo o material de soldadura, este
tiene un motor de inducción sencillo el cual gira a una velocidad constante para ir
colocando el electrodo sobre la pieza.
El segundo actuador corresponde al motor que controla la
inclinación del porta electrodos, este es paso a paso No 2,
que funciona con señales digitales y se puede controlar
hasta centésimas de grado de giro, este motor ayudara y
corregirá la distancia del porta electrodos a las piezas a
soldar, para que la distancia sea apropiada y se produzca
un arco perfecto; También corregirá la posición del porta
electrodos cuando la este deba cambiar el ángulo de
soldadura.
Servomotores y su Control.
Físicamente los servos tienen un rango restringido de
movimientos, el motor gira entre 0° y180°. Para controlar el
movimiento se debe alimentar el servo motor con una señal
modulada por un ancho de pulso (PWM), el ancho de pulso
enviado a la entrada de control indica al motor la posición en la
Figura 3
Figura 4
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍA
Materia ROBÓTICA Código 299011
2012_II
cual se desea colocar.
HS-322HD Standard Heavy Duty Servo
Utiliza los revolucionarios piñones de Karbonite ™ que es cuatro veces más fuerte
que los estándar de nylon blancos
HS-322HD
Rango: 180 grados
Speed: 0.19 / 0.15 sec. per 60 deg. (4.8V/6V)
Torque: 3.0 / 3.7 kg*cm (4.8V/6V)
Fabricante: HITEC Precio por unidad (Pieza):
$40.000
Piñonería: Nylon Voltaje: 4.8V Velocidad: 0.21sec/60° sin carga Torque 42 oz/in.
(3.3 kg.cm) Voltaje: 6V Velocidad: 0.20sec/60° sin carga Torque: 56.93 oz/in. (4.1
kg.cm)
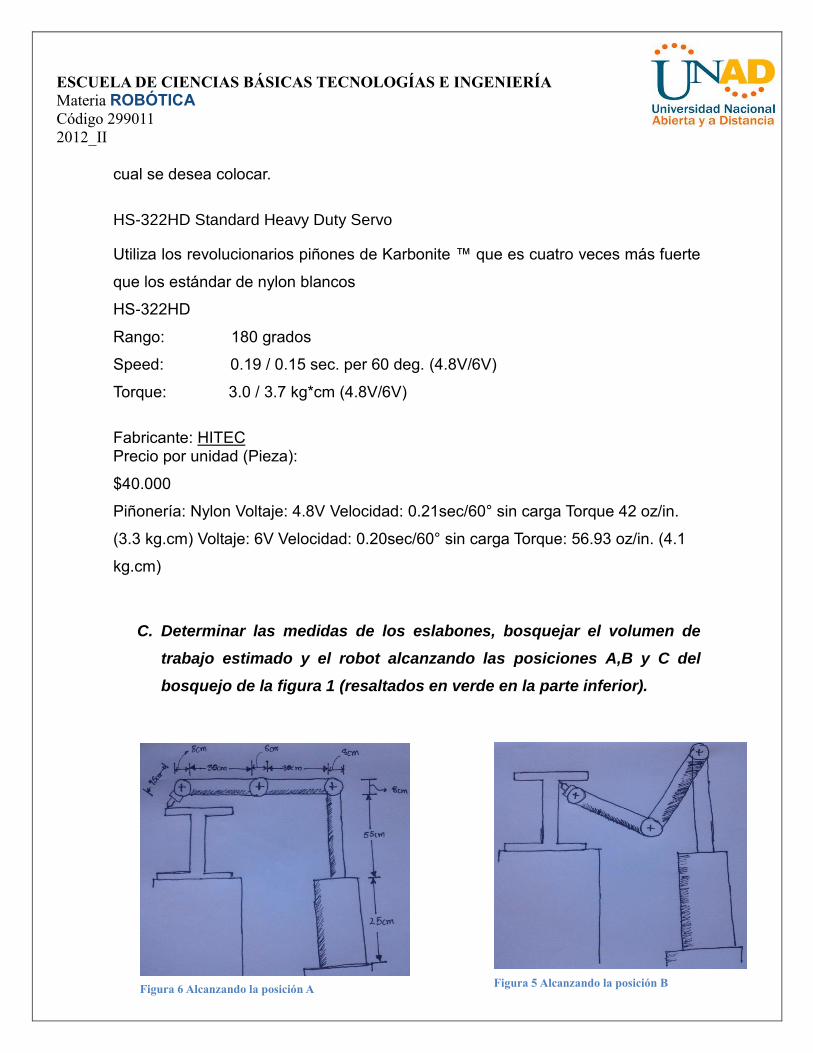
C. Determinar las medidas de los eslabones, bosquejar el volumen de
trabajo estimado y el robot alcanzando las posiciones A,B y C del
bosquejo de la figura 1 (resaltados en verde en la parte inferior).
Figura 5 Posición A Figura 6 Posición B Figura 6 Alcanzando la posición A Figura 5 Alcanzando la posición B

ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍA
Materia ROBÓTICA Código 299011
2012_II
Medidas de los Eslabones:
Eslabón vertical: 55 cm. Eslabones del brazo: 38 cm= 30 cm+2X4cm
Efector final: 15 cm.
Volumen de trabajo aproximado: Desde 90 hasta 270 grados con un alcance
mínimo de 60 cms a 90° y máximo de 91 cms a 270°
D. A partir de los actuadores escogidos, determinar ¿Cómo se enviarán
las señales de mando a los actuadores para realizar los movimientos
de las articulaciones?¿Que elementos son necesarios para hacer esta
tarea?
Las señales se enviarán como pulsos de duración definida que los actuadores
interpretarán y que dan lugar a la rotación relativa de los eslabones del robot. Los
elementos necesarios serán:
Un sistema de control basado en un PC industrial y un PMAC (Controlador multi
ejes programable) y un medio de transmisión que en este caso se considera que
Figura 8 Volumen de trabajo Figura 7 Alcanzando la posición C

ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍA
Materia ROBÓTICA Código 299011
2012_II
es un cableado.
E. Determinar los elementos que deben incluirse en el controlador del
robot, esto se debe hacer a nivel general no se requieren planos
electrónicos, mecánicos, neumáticos o hidráulicos, basta con un
listado de elementos básico y un diagrama de bloques, lo más
importante es justificar de acuerdo a la selección de actuadores.
La señal de entrada será la información que obtenemos de los sensores, por
ejemplo, la medición de posiciones conjuntas.
La señal de salida es la señal enviada a los actuadores del robot por ejemplo
pares de motor.
La tarea del programador es asignar a partir de los datos del sensor a la señal de
actuador.
F. Determinar la forma en que el controlador del robot se comunicará con
el software de control instalado en un PC (el PC estará a 30 metros del
robot, considere un ambiente contaminado de ruido electromagnético
Figura 9 Diagrama de bloques del robot
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍA
Materia ROBÓTICA Código 299011
2012_II
debido a la presencia de motores de alta potencia en el área de
trabajo). Especificar y justificar la selección.
La falta de rango, mala recepción, el movimiento errático y la respuesta lenta son
algunos de los síntomas causados por la interferencia electromagnética.
La mejor forma de enfrentar el problema de la interferencia no es solucionar los
problemas causados por ella invirtiendo dinero y tiempo en medios necesarios
para limitarla sino implementando medidas para evitarla:
Asegurarse que todos los relés y solenoides tengan un diodo de protección
fly-back contra chispas producidas por corrientes inductivas.
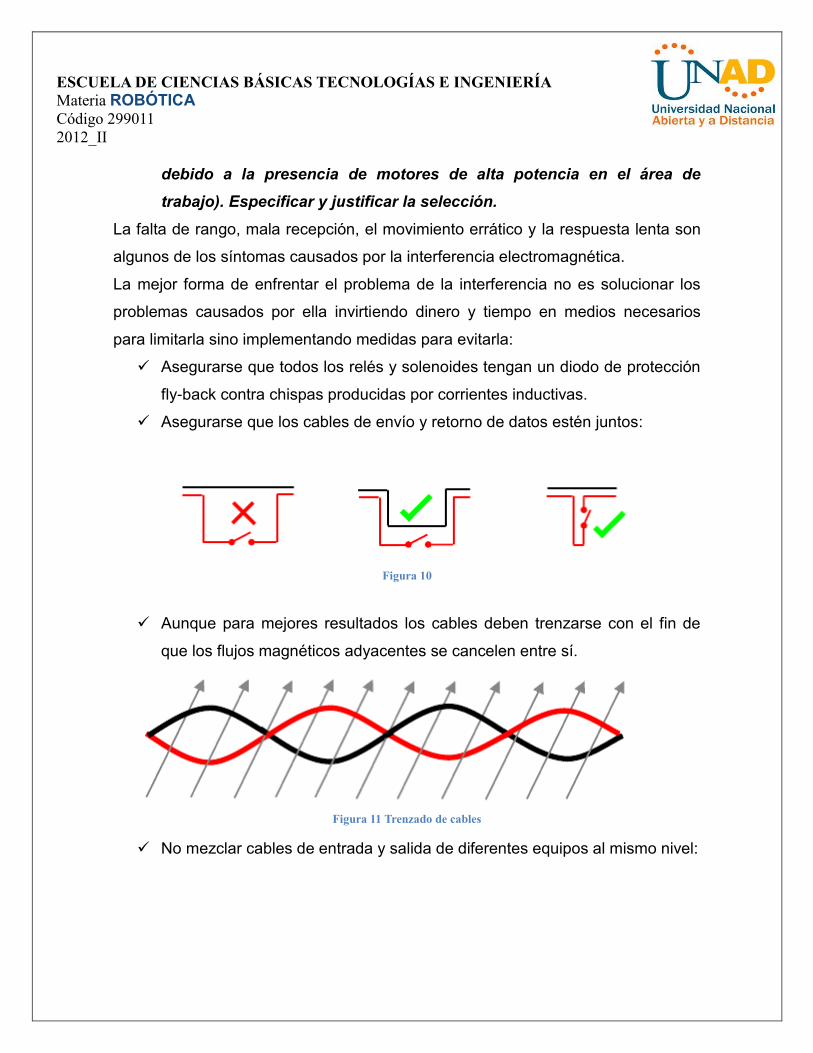
Asegurarse que los cables de envío y retorno de datos estén juntos:
Figura 10
Aunque para mejores resultados los cables deben trenzarse con el fin de
que los flujos magnéticos adyacentes se cancelen entre sí.
Figura 11 Trenzado de cables
No mezclar cables de entrada y salida de diferentes equipos al mismo nivel:

ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍA
Materia ROBÓTICA Código 299011
2012_II
Figura 12
Asegurarse que los equipos tenga polo a tierra.
Asegurarse que se utilizan cables con apantallamiento y que este se
conecta a tierra adecuadamente.
Figura 13 Conexión del apantallamiento
G. Determinar el tipo o tipos de programación que se incluirán en el
robot, justificando la selección de acuerdo a los requerimientos del
problema.
Debido a su tamaño, los requisitos de energía y la arquitectura hardware,
CompactRIO y NI Single-Board RIO hacen excelentes plataformas de
computación para aplicaciones de este tipo. Las capas de operador, plataforma, y
algoritmo pueden ser distribuidas a través del procesador en tiempo real y la
FPGA, y si es necesario, la capa de interfaz de usuario se puede ejecutar en un
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍA
Materia ROBÓTICA Código 299011
2012_II
PC anfitrión. La programación del equipo se puede hacer usando LABVIEW en el
cual un nodo del FPGA convierte los datos de los sensores en datos interpretables
por el usuario, por ejemplo la distancia a la viga a soldar.
H. Determinar y justificar si es necesario incluir en el robot un sistema
de visión artificial (¿Cómo se manejará el problema de las variaciones
en las medidas del perfil de la viga?). Si se determina que el sistema
de visión artificial es necesario, se deben prever a nivel general los
nuevos requerimientos a nivel de software-hardware necesario en el
montaje.
Debido a las variaciones del perfil de la viga en un proceso delicado como es la
soldadura es necesario implementar una medida que permita contrarrestar tales
variaciones. Si los requerimientos de hardware para procesar la información
proveniente del sensor son insuficientes se requerirá distribuir las capas en varias
plataformas.

ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍA
Materia ROBÓTICA Código 299011
2012_II
CONCLUSIONES
La soldadura es uno de los procesos más exitosos de robotización en el mundo. Al
menos un tercio de los robots industriales son utilizados para soldadura de arco o
para soldadura de punto.
La función del operario pasa a ser la carga de las subpartes y la descarga de la
pieza ya soldada, no teniendo que realizar él la soldadura. El operario no es
sometido entonces a la radiación de la soldadura ni a altas temperaturas, ni a los
gases del proceso.
La Robótica permite una producción más eficiente, reducción del desperdicio de
material, y de costos, además de mejorar sustancialmente la calidad de los
productos.
Las empresas modernas utilizan robots industriales en aquellos centros de trabajo
donde prevalezcan situaciones de peligro para los trabajadores por la naturaleza
del proceso.
El uso de robots en las empresas se va haciendo necesario a medida de que el
mundo empresarial va a pasos agigantados en lo que a la tecnología se refiere.
Por otra parte para poder ofrecer calidad y bajos precios hay que disminuir la
mayoría de costos de la empresa, en donde los robots industriales juegan un
papel importante, ya que tienen una gran capacidad de producción con un costo
muy bajo.

ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍA
Materia ROBÓTICA Código 299011
2012_II
BIBLIOGRAFÍA
BRAZO ROBÓTICO. Extraído el 28 de noviembre de 2012 desde
http://www.slideshare.net/elvisrichard/brazo-robtico-1775457#btnNext
ROBÓTICA INDUSTRIAL. Extraído el 28 de noviembre de 2012 desde
http://www.google.com.co/url?sa=t&rct=j&q=&esrc=s&frm=1&source=web&c
d=9&ved=0CFYQFjAI&url=http%3A%2F%2Fwww.virtual.unal.edu.co%2Fcu
rsos%2Fingenieria%2Fmecatronica%2Fdocs_curso%2FAnexos%2FTUTOR
IALcnc%2FDOCUMENTOS%2FTEORIA%2FROBOTICA%2520INDUSTRI
AL.pdf&ei=ZPDEUO-
qBYjs8wSNuICADw&usg=AFQjCNH6eGKEiBW9jI02bHNgrMaYbm6xzA&si
g2=ENITXKibuDyO_4UOjNp7sw&cad=rja
MANIPULACIÓN RÁPIDA DE ROBOT. Extraído el 1° de diciembre de 2012
desde
http://www.slideshare.net/Cqje/manual-para-programar-brazo-robotico-
industrial-nachi#btnPrevious
TARN, Tzyh-Jong. Robotic welding, intelligence and automation.
ELECTRO-MAGNETIC INTERFERENCE IN ROBOTS AND HOW TO DEAL
WITH IT! Disponible en:
http://www.fightingrobots.co.uk/documents/EMIGuidelines.pdf