RESPUESTA DINÁMICA Y ESTABILIDAD DE...
18
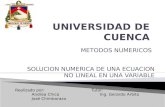
1 RESPUESTA DINÁMICA Y ESTABILIDAD DE SISTEMAS Tiempo continuo Tiempo discreto Función de transferencia Función de transferencia Polos y ceros (reales o complejos) Salida para una entrada escalón, expansión en fracciones y antitransformada. Polos reales Salida para una entrada escalón, expansión en fracciones y antitransformada. Polos complejos () ( ) ( ) ; () () Yz Hz hk Hz Xz 1 2 0 1 2 1 1 2 1 2 1 () () () m m m m m n n n n n bs bs bs b s b Bs Hs s as as a s a As 1 2 0 1 2 1 1 2 1 2 1 () () () n n n n n n n n n n bz bz bz b z b Bz Hz z az az a z a Az 1 1 ( ) () ( ) n polos de valores: m ceros de valores: m j j n i i i j K s c Hs s p p c 1 1 ( ) () ( ) n polos de valores: n ceros de valores: n j j n i i i j K z c Hz z p p c 1 ( ) ( ) ( ) ; () () Ys HsXs yt L Ys 1 ( ) ( ) ( ) ; () () Yz HzXz yk Yz 1 2 1 2 () e n n d d d d Ys s s p s p s p 1 2 0 1 2 () 1 e n n dz dz dz dz Yz d z z p z p z p 1 2 1 2 1 () n pt pt pt e n yt d de de de u t 0 1 1 2 2 1 () () k k k e n n yk d k d dp dp dp u k 1 2 1 2 * () ( ) ( ) e l l nl dl l n l nl dl n d d d d Ys s s p s p s j d d s j s p 1 2 0 1 2 * () 1 + l l e l j l l n j n l dz dz dz dz Yz d z z p z p z e dz dz z p z e 0 1 1 2 2 () () cos( ) 0 k k k e l l l l k n n yk d k d dp dp D k dp k 1 2 1 2 () cos( ) 0 l nl n t pt pt e l dl l pt n yt d de de De t de t () ( ) ( ) ; () () Ys Hs ht Hs Xs
Transcript of RESPUESTA DINÁMICA Y ESTABILIDAD DE...

1
RESPUESTA DINÁMICA Y ESTABILIDAD DE SISTEMAS
Tiempo continuo Tiempo discreto
Función de
transferencia
Función de
transferencia
Polos y ceros
(reales o
complejos)
Salida para una
entrada escalón,
expansión en
fracciones y
antitransformada.
Polos reales
Salida para una
entrada escalón,
expansión en
fracciones y
antitransformada.
Polos complejos
( )( ) ( ) ; ( )
( )
Y zH z h k H z
X z
1 2
0 1 2 1
1 2
1 2 1
( )( )
( )
m m m
m m
n n n
n n
b s b s b s b s b B sH s
s a s a s a s a A s
1 2
0 1 2 1
1 2
1 2 1
( )( )
( )
n n n
n n
n n n
n n
b z b z b z b z b B zH z
z a z a z a z a A z
1
1
( )
( )
( )
n polos de valores: m ceros de valores:
m
j
j
n
i
i
i j
K s c
H s
s p
p c
1
1
( )
( )
( )
n polos de valores: n ceros de valores:
n
j
j
n
i
i
i j
K z c
H z
z p
p c
1( ) ( ) ( ) ; ( ) ( )Y s H s X s y t L Y s 1( ) ( ) ( ) ; ( ) ( )Y z H z X z y k Y z
1 2
1 2
( ) e n
n
d dd dY s
s s p s p s p
1 2
0
1 2
( )1
e n
n
d z d zd z d zY z d
z z p z p z p
1 2
1 2 1( ) np tp t p t
e ny t d d e d e d e u t
0 1 1 2 2 1( ) ( ) k k k
e n ny k d k d d p d p d p u k
1 2
1 2
*
( )( )
( )
e l
l nl dl
l n
l nl dl n
d dd dY s
s s p s p s j
d d
s j s p
1 2
0
1 2
*
( )1
+
l
l
e l
j
l
l n
j
nl
d z d zd z d zY z d
z z p z p z e
d z d z
z pz e
0 1 1 2 2( ) ( ) cos( )
0
k k k
e l l l l
k
n n
y k d k d d p d p D k
d p
k
1 2
1 2( ) cos( )
0
l nl
n
tp t p t
e l dl l
p t
n
y t d d e d e D e t
d e
t
( )( ) ( ) ; ( )
( )
Y sH s h t H s
X s

2
Desde el punto de vista de la variación de la respuesta, se
distinguen dos etapas: transitoria y permanente
DEMO “Exploring the s-plane”: Orden 1 y variaciones. Orden 2
y variaciones. Orden superior y polos dominantes

3
4.3 Sistemas de primer orden
Figura 4.4 a) Sistema de primer orden b) Patrón de polos y ceros
1
1 1( ) ( ) ( )
( )
( ) 1 ( )at
aC s R s G s
s s a s s a
c t e u t
ssR
1)(
Ecuación de sistema de primer orden con entrada escalón unitario

4
Constante de tiempo
esta definida como el
tiempo que le toma a
la respuesta a escalón
alcanzar el 63% de su
valor final.
Características dinámicas de la respuesta de un sistema de primer orden a un escalón unitario
Figura 4.5
1
a

5
4.4 Sistemas de segundo orden: introducción
Figura 4.7

6
4.4 Sistemas de segundo orden: introducción
Figura 4.7

7
Figura 4.10
Respuestas escalón para casos de amortiguamiento en
sistemas de segundo orden

8
Sistema de 2° orden subamortiguado, dos polos complejos
conjugados.
Función de transferencia normalizada y sus parámetros
Frecuencia natural, ωn, que es la frecuencia de oscilación del sistema sin amortiguamiento, en rad/seg.
Factor de amortiguamiento, ζ es la cantidad que surge de la comparación de la frecuencia a la cual disminuye la envolvente de la exponencial con respecto de la frecuencia natural.
La función normalizada de este tipo de sistemas es:
Ej. Encontrar ζ y ωn para la siguiente función de
transferencia :
2
36( )
4.2 36G s
s s
2
2 2( ) 0 1
2
n
n n
G ss s

9
Figura 4.17
Patrón de polos para un sistema de segundo orden
subamortiguado

10
Figura 4.11
Respuesta de segundo orden en función del factor de amortiguamiento
Figura 4.11
2
2
2 1
1( ) 1 ( )
1
11 ; tan
nt
d
d n
y t e sen t
Solución analítica

11
Figura 4.11
Respuesta de segundo orden en función del factor de amortiguamiento
Figura 4.11

12
Ejercicio 4.4 Para cada uno de los sistemas mostrados a
continuación halle los valores de ζ y y diga que tipo de
respuesta es de esperarse
Figura 4.12
n

13
4.6 Sistemas de segundo orden subamortiguados
Figura 4.13
Respuestas
subamortiguadas
de segundo orden
para diferentes
valores de ζ
Al disminuir el factor de amortiguamiento hace mas
oscilatoria la respuesta y la frecuencia natural solo escala
en el tiempo la respuesta.
Figura 4.13

14
Figura 4.14
Parámetros de
especificación de
sistemas
subamortiguados
1.- Tiempo de levantamiento
2.- Tiempo sobrepaso
3.- Sobrepaso
4.- Tiempo de asentamiento
-1 ; =cosr
d
t
p
d
t
4s
n
t
21Mp OS e

15
Figura 4.15
Figura 4.16
Figura 4.15
Porcentaje de
sobrepaso vs ζ
Figura 4.16
Tiempo de
levantamiento
normalizado vs ζ
21Mp OS e

16
Figura 4.19
Regiones de
parámetros constantes
a) parte real constante
b) parte imaginaria
constante
c) factor de
amortiguamiento
relativo constante

17
Regiones de parámetros constantes en Matlab

18Figura 4.23
Polos dominantes
En los sistemas de orden superior, alguno o algunos de los
polos se encuentran más cerca del eje imaginario. A dichos
polos se les llama polos dominantes porque determinan en
mayor medida el comportamiento y respuesta del sistema.
complejos.