ANÁLISIS DE PARÁMETROS DE DISEÑO GEOMÉTRICO DE …
97
ANÁLISIS DE PARÁMETROS DE DISEÑO GEOMÉTRICO DE VÍAS PARA VEHÍCULOS ARTICULADOS TIPO A-BUS TRABAJO DE GRADO PARA OPTAR AL TÍTULO DE INGENIERO CIVIL Presentado por: JUAN ESTEBAN FONSECA NÚÑEZ Asesor: FABIÁN TAFUR SÁNCHEZ Ingeniero Civil, M. Sc. UNIVERSIDAD DE LOS ANDES FACULTAD DE INGENIERÍA DEPARTAMENTO DE INGENIERÍA CIVIL Y AMBIENTAL Bogotá D.C. Diciembre 2014
Transcript of ANÁLISIS DE PARÁMETROS DE DISEÑO GEOMÉTRICO DE …
ANÁLISIS DE PARÁMETROS DE DISEÑO GEOMÉTRICO DE
VÍAS PARA VEHÍCULOS ARTICULADOS TIPO A-BUS
TRABAJO DE GRADO PARA OPTAR AL TÍTULO DE INGENIERO CIVIL
Presentado por:
JUAN ESTEBAN FONSECA NÚÑEZ
Asesor:
FABIÁN TAFUR SÁNCHEZ
Ingeniero Civil, M. Sc.
UNIVERSIDAD DE LOS ANDES
FACULTAD DE INGENIERÍA
DEPARTAMENTO DE INGENIERÍA CIVIL Y AMBIENTAL
Bogotá D.C. Diciembre 2014
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
I
CONTENIDO
1. INTRODUCCIÓN ........................................................................................................... 1
2. OBJETIVOS .................................................................................................................... 2 2.1. General.......................................................................................................................................... 2 2.2. Específicos ................................................................................................................................... 2
3. VARIABLES Y PARÁMETROS DE DISEÑO GEOMÉTRICO .............................. 3
4. CRITERIOS ADOPTADOS .......................................................................................... 4 4.1. Manual AASHTO A Policy on Geometric Design of Highways and Streets .......................... 4 4.2. Vehículo de Diseño ................................................................................................................ 4 4.3. Peralte máximo (emáx) ............................................................................................................. 5 4.4. Tipo de curvas horizontales .................................................................................................... 5 4.5. Longitud de transición de peralte (Lp) ................................................................................... 5
4.5.1. Uso de Lr en análisis horizontal ............................................................................................ 6 4.6. Número y ancho de carriles en la calzada ............................................................................... 6 4.7. Método para realizar la transición de peralte .......................................................................... 6 4.8. Terreno que bordea la vía desde un punto de vista horizontal ................................................ 6 4.9. Trayectoria del vehículo y radio de diseño ............................................................................. 7 4.10. Longitud de transición de peralte en curvas circulares ........................................................... 9 4.11. Cálculo de distancia de visibilidad de parada ......................................................................... 9 4.12. Medición de la distancia de visibilidad de parada .................................................................. 9 4.13. Limitaciones de la articulación del vehículo ........................................................................ 10 4.14. Velocidad de maniobra del conductor .................................................................................. 10 4.15. Sobreancho ........................................................................................................................... 11
4.15.1. Sobreancho con manual AASHTO PGDHS..................................................................... 11 4.15.2. Sobreancho con Vehicle Tracking .................................................................................... 12
4.16. Longitud de transición de sobreancho .................................................................................. 12 4.17. Tipo de curvas verticales ...................................................................................................... 13 4.18. Obtención de la longitud de curva vertical LCV .................................................................. 13
4.18.1 Curvas Convexas ................................................................................................................ 14 4.18.2 Curvas Cóncavas ................................................................................................................ 14 4.18.3 Limitantes adicionales ........................................................................................................ 14
4.18.3.1 Criterio de Operación .................................................................................................. 15 4.18.3.2 Criterio de drenaje ....................................................................................................... 15 4.18.3.3 Condición mínima de estética ..................................................................................... 15
5. ANÁLISIS DE PARÁMETROS DE DISEÑO ........................................................... 16 5.1. ANÁLISIS HORIZONTAL ................................................................................................. 16
5.1.1 Tipos de análisis horizontales ............................................................................................... 16 5.1.1. PUNTO DE EQUILIBRIO DE CRITERIOS DE ACELERACIÓN CENTRÍPETA Y
GEOMETRÍA DEL VEHÍCULO ................................................................................................. 17 5.1.1.1. Resultados ............................................................................................................... 18 5.1.1.2. Conclusiones ........................................................................................................... 18
5.1.2. ESTUDIO ANALÍTICO .............................................................................................. 19 5.1.2.1. Objetivo ................................................................................................................... 19 5.1.2.2. Valores de entrada asumidos y simplificaciones ..................................................... 19 5.1.2.3. Procedimiento y Teoría ........................................................................................... 19 5.1.2.4. Resultados y Conclusiones ...................................................................................... 23
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
II
5.1.3. LIMITACIONES DEL VEHÍCULO EN CURVAS HORIZONTALES Y
SOBREANCHO ............................................................................................................................ 28 5.1.3.1. Análisis Cualitativo ................................................................................................. 28 5.1.3.2. Cálculos y resultados ............................................................................................... 32 5.1.3.3. Conclusiones y cálculos de sobreanchos y longitudes de transición de sobreancho 33
5.1.3.3.1. Cálculo de sobreancho optimizado con Vehicle Tracking ................................ 33 5.1.3.3.2. Longitud de transición de sobreancho ............................................................... 36 5.1.3.3.3. Comparación de sobreancho optimizado y AASHTO PGDHS ........................ 39
5.1.4. ANÁLISIS CON AUTOCAD CIVIL 3D .................................................................... 41 5.1.4.1. Comprobación de cálculos teóricos de deflexiones por visibilidad ............................. 42
5.1.4.1.1. Abscisa de menor distancia de visibilidad ......................................................... 43 5.1.4.2. Gráficas de ángulo de deflexión máximo por visibilidad ............................................. 44
5.2. ANÁLISIS VERTICAL ....................................................................................................... 47 5.2.1. ANÁLISIS TEÓRICO ................................................................................................. 47
5.2.1.1. Ecuaciones de curvas convexas ............................................................................... 47 5.2.1.2. Ecuaciones de curvas cóncavas ............................................................................... 48 5.2.1.3. Comparación ecuaciones cóncavas y convexas ....................................................... 49 5.2.1.4. Análisis gráfico de LCV requerido en curvas verticales ......................................... 50
5.2.2. LIMITACIONES DEL VEHÍCULO ........................................................................... 56 5.2.2.1. Análisis del vehículo sin curva vertical .................................................................. 57 5.2.2.2. Tipo de limitación geométrica predominante .......................................................... 59 5.2.2.3. Influencia de la pendiente inicial en una curva con A y LCV establecidos ............. 60 5.2.2.4. Análisis de curvas verticales con cambios de pendiente superiores a AS-C ................. 63
6. CONCLUSIONES ......................................................................................................... 66
7. RECOMENDACIONES ............................................................................................... 70
8. GLOSARIO Y ABREVIACIONES ............................................................................. 71
9. BIBLIOGRAFÍA ........................................................................................................... 73
10. ANEXOS .................................................................................................................... 74 10.1. DETERMINACIÓN DE PARÁMETROS DE DISEÑO ..................................................... 74
10.1.1. PROCEDIMIENTO ..................................................................................................... 74 10.1.2. Cálculo de longitud de transición de sobreancho ......................................................... 74 10.1.3. Cálculo de velocidad máxima de diseño por maniobra del vehículo (Vm)................... 75 10.1.4. Cálculo de sobreancho ................................................................................................. 75 10.1.5. Ángulo de deflexión máximo en túnel ......................................................................... 76
10.2. Obtención de velocidad máxima en curva por maniobra (Vm) y ángulo de giro máximo .... 76 10.3. Modelación de las curvas con Civil 3D ................................................................................ 78 10.4. Determinación de ecuaciones para determinación de parámetros ........................................ 82
10.4.1. Gráfica de Uv vs Rv ..................................................................................................... 83 10.4.2. Gráfica de Vm vs Rv ................................................................................................... 86 10.4.3. Gráfica de tΔd vs RV ..................................................................................................... 88
10.5. Procedimiento de Cálculo de Sobreanchos ........................................................................... 89 10.5.1. Cálculo de sobreancho con norma AASHTO PGDHS ................................................ 89 10.5.2. Cálculo de sobreancho con Vehicle Tracking .............................................................. 91
10.6. Sistemigrama de variables de diseño geométrico de vías ..................................................... 97
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
1
1. INTRODUCCIÓN
El diseño geométrico de vías se basa en el cumplimiento de condiciones, las cuales se traducen
en variables y parámetros de diseño que se deben buscar cumplir de forma simultánea. Sin
embargo, debido a la estrecha relación que existe entre cada una de estas, es difícil encontrar
soluciones para ciertos casos, teniendo en cuenta que el cambio en una variable puede beneficiar
un criterio, pero a la vez perjudicar otro.
Para el diseño de vías y autopistas, el diseñador cuenta con una gran libertad para escoger los
alineamientos y parámetros de diseño, de tal forma este puede ser muy conservador en sus
diseños, y de esta forma garantizar sin muchos cálculos o utilización de software que se
cumplen cada una de las restricciones. En el caso de vías interurbanas las restricciones
aumentan debido al poco espacio con el que se cuenta y la necesidad de que los vehículos pasen
por ciertas zonas específicas, llevando a que el diseño de las vías se pueda complicar y se
requiera realizar un diseño por medio de un análisis minucioso sobre la influencia del cambio de
cada variable en diseño integral.
Además, en el caso de las vías para sistemas de transporte público masivo de buses articulados
como los del sistema TransMilenio, se han presentado errores que han llevado a que se tengan
problemas y accidentes durante la circulación de los vehículos. Estos errores podría pensarse
pueden ocurrir debido a descuidos en los diseños o en la construcción de las vías, sin embargo
en gran parte estos podrían deberse a la gran dificultad de adaptar las restricciones particulares
de estos vehículos tipo A-BUS a las vías por diseñar, teniendo en cuenta es difícil conocer de
forma teórica el comportamiento de estos a medida que transitan por curvas horizontales y
verticales, y realizar pruebas reales conllevaría a tiempos y costos excesivos.
Asimismo, el manual de AASHTO A Policy on Geometric Design of Highways and Streets, se
utilizan fórmulas y se obtienen resultados analíticos y empíricos para ciertos tipos de vehículos,
entre los cuales se encuentran vehículos de pasajeros, buses y cierto tipo de tracto camiones. Por
eso en los casos en los que se quiere diseñar otros como los A-BUS, la utilización de este podría
no cumplir con los requerimientos, o llevar a que se realicen diseños muy conservadores, que no
permitan optimizar el diseño de las vías para ajustarlas a las limitaciones del área urbana.
Debido a esto se considera pertinente realizar un análisis de diseño geométrico de vías para los
vehículos A-BUS de forma analítica y con la ayuda de software como AutoCad Civil 3D y
Vehicle Tracking, de tal forma se encuentren resultados y conclusiones que faciliten entender y
definir los parámetros de diseño, para garantizar se obtengan diseños adecuados y a la vez
óptimos. De esta forma se analiza en el presente proyecto los parámetros de diseño para estos
vehículos a nivel horizontal y vertical, adaptándose a ciertos estándares de normas y de
TransMilenio, comparando los resultados obtenidos con los programas y la norma AASHTO
PGDHS.
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
2
2. OBJETIVOS
2.1. General
Analizar los parámetros de diseño geométrico de vías a nivel horizontal y vertical para
vehículos articulados tipo A-BUS de forma analítica y gráfica con las herramientas
computacionales AutoCad Civil 3D y Vehicle Tracking.
2.2. Específicos
Analizar los parámetros de diseño geométrico de vías basándose en la norma AASHTO
A Policy on Geometric Design of Highways and Streets y todas sus relaciones.
Analizar y concluir respecto a la visibilidad de los vehículos en túneles, delimitando las
restricciones que estos brindan en la geometría de la vía.
Obtener conclusiones no contempladas en normas de diseño de vías respecto a las
limitaciones adicionales de los vehículos tipo A-BUS en las variables de diseño,
teniendo en cuenta sus limitaciones por geometría, articulación y tiempo de maniobra
de los conductores.
Presentar un procedimiento claro de realización de análisis de parámetros de diseño
geométrico de vías para un tipo de vehículo particular, que se pueda reproducir para
analizar todo tipo de vehículo.
Brindar una metodología práctica para involucrar las restricciones en los diseños
geométricos de vías para vehículos articulados A-BUS, utilizando gráficas y ecuaciones
acompañadas de conclusiones generales útiles para este.
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
3
3. VARIABLES Y PARÁMETROS DE DISEÑO GEOMÉTRICO
Para poder conocer cada uno de los parámetros de diseño involucrados en una vía se basó en la
norma AASHTO A Policy on Geometric Design of Highways and Streets, principalmente en el
capítulo 2 y 3, los cuales son Design Controls and Criteria y Elements of Design. Teniendo en
cuenta cada una de las consideraciones que se hacen en la norma se realizó un sistemigrama que
pudiera ser una guía para ver la relación entre cada uno de los parámetros y variables, de tal
forma se realicen análisis con fundamentación teórica adecuada y objetiva.
En el sistemigrama que se muestra en el Anexo 11.5 están las variables generales en color piel,
las variables relacionados con curvas verticales en verde, aquellas relacionados con la
geometría del vehículo en azul, y los criterios asumidos por el diseñador según consideraciones
adaptadas para el diseño en gris. Además se muestra en amarillo unas verificaciones a realizar
en el momento de hacer cada uno de los análisis, entre los cuales se debe cumplir con los radios
mínimos de AASHTO PGDHS calculados por el efecto dinámico de aceleración centrípeta en
curvas horizontales, y la distancia de visibilidad de parada.
Además en este se muestra por medio de flechas la relación entre las diferentes variables, las
cuales se tomó por convención representan el efecto de un parámetro ante el aumento del otro.
Se utilizan 3 colores diferentes de links cada uno con un significado diferente de relación entre
las variables conectadas. Aquellos de color azul muestran cuando ante el aumento del
parámetro desde el cual sale la flecha conlleva a que el parámetro al que llega la flecha también
aumente su valor (directamente proporcionales). Por otro lado aquellos links de color rojo
representan cuando ante el aumento del parámetro desde el cual sale la flecha lleva a que
disminuya el valor del parámetro al cual llega la flecha (inversamente proporcional). Finalmente
aquellos links de color gris muestran simplemente relaciones entre criterios o subdivisiones de
temas a incluir.
El sistemigrama se encuentra en el Anexo 10.6 al final del documento debido a su gran tamaño,
sin embargo se recomienda su utilización para poder entender la interrelación entre todas las
variables en una vía.
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
4
4. CRITERIOS ADOPTADOS
Teniendo en cuenta las anteriores relaciones entre parámetros y la necesidad de establecer
criterios base para los diseños, se mencionarán los valores adoptados para estos con el fin de
realizar los análisis.
4.1. Manual AASHTO A Policy on Geometric Design of Highways and Streets
Para el diseño de las vías en este análisis se estableció un manual base, respecto al cual
se definirán gran mayoría de las fórmulas y estándares, el manual AASHTO A Policy on
Geometric Design of Highways and Streets, teniendo en cuenta este rige el diseño de la
mayoría de las vías y es muy completo en cada uno de los temas. Por motivos prácticos
este se abreviará AASHTO PGDHS a lo largo del documento
Sin embargo en algunos casos se observará que se utiliza el Manual de Diseño
Geométrico de Carreteras de INVIAS, como en el caso de la definición de las
ecuaciones para curvas verticales cóncavas, debido a que en este caso esta es más
detallada.
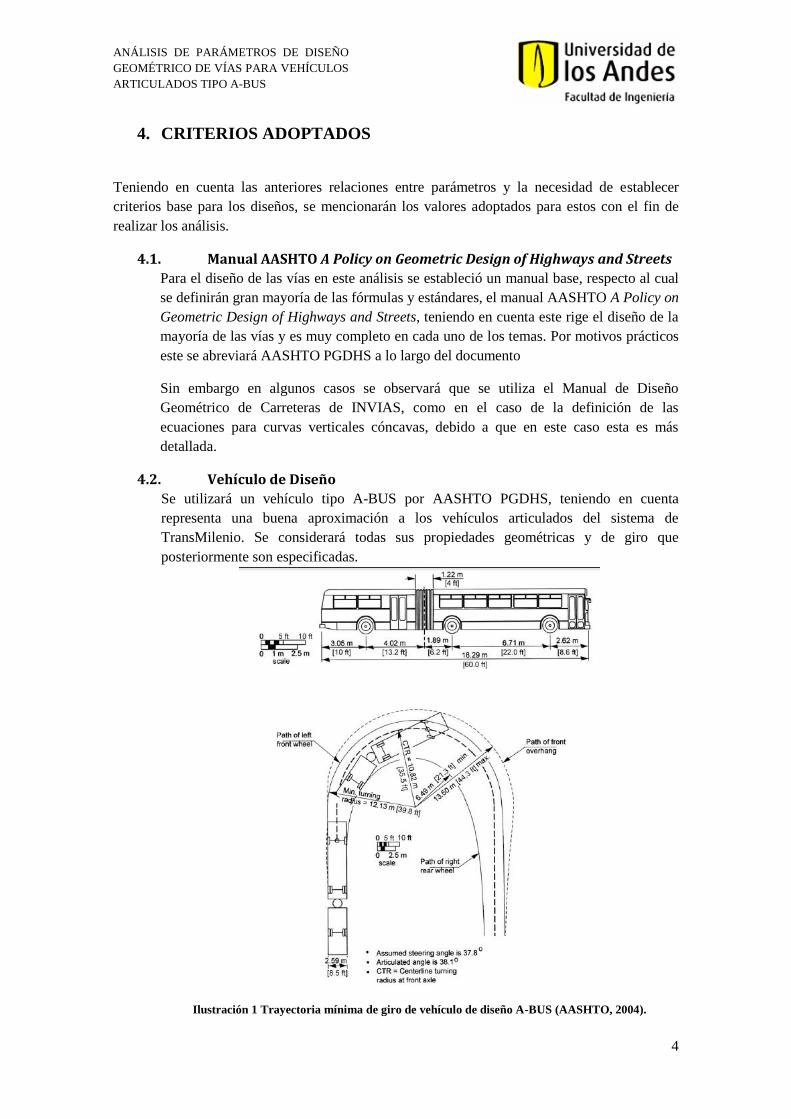
4.2. Vehículo de Diseño
Se utilizará un vehículo tipo A-BUS por AASHTO PGDHS, teniendo en cuenta
representa una buena aproximación a los vehículos articulados del sistema de
TransMilenio. Se considerará todas sus propiedades geométricas y de giro que
posteriormente son especificadas.
Ilustración 1 Trayectoria mínima de giro de vehículo de diseño A-BUS (AASHTO, 2004).

ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
5
4.3. Peralte máximo (emáx)
Se utilizará un peralte máximo del 4% teniendo en cuenta es el que se utiliza de forma
estándar en el sistema de transporte público de buses TransMilenio.
4.4. Tipo de curvas horizontales
Se utilizarán curvas circulares simples a nivel horizontal para el análisis, por lo que se
pasará de un alineamiento de una tangente a un arco circular y posteriormente una
tangente nuevamente.
Las curvas verticales serán parabólicas y simétricas, basadas en el criterio de distancia
de visibilidad de parada y tasa constante de cambio de la pendiente entre la pendiente de
entrada y salida.
4.5. Longitud de transición de peralte (Lp)
Se asumirá ésta empezará con un borde de la calzada con pendiente del 2% (bombeo
normal) y el otro con 0, teniendo en cuenta la dirección de la curva horizontal (el borde
de 0% será el externo). Esto implica que el cálculo, utilizando la Ecuación 1 obtenida de
la fórmula 3-25 del manual AASHTO PGDHS de 2004 (AASHTO, 2004), se hará con
base al borde externo que tendrá que pasar de un peralte de 0% a uno del 4%, teniendo
en cuenta el borde interno pasará únicamente de un peralte del 2% al 4%.
𝐿𝑟 =(𝑤 ∗ 𝑛1) ∗ 𝑒𝑑
𝛥∗ 𝑏𝑤 (1)
Siendo:
Lr: longitud de transición de peralte en metros
Δ: Máxima inclinación relativa de la rampa de peraltes
n1: Número de carriles rotados
bw: Factor de ajuste debido al número de carriles girados
w: ancho de un carril rotado
ed: Peralte de diseño en porcentaje
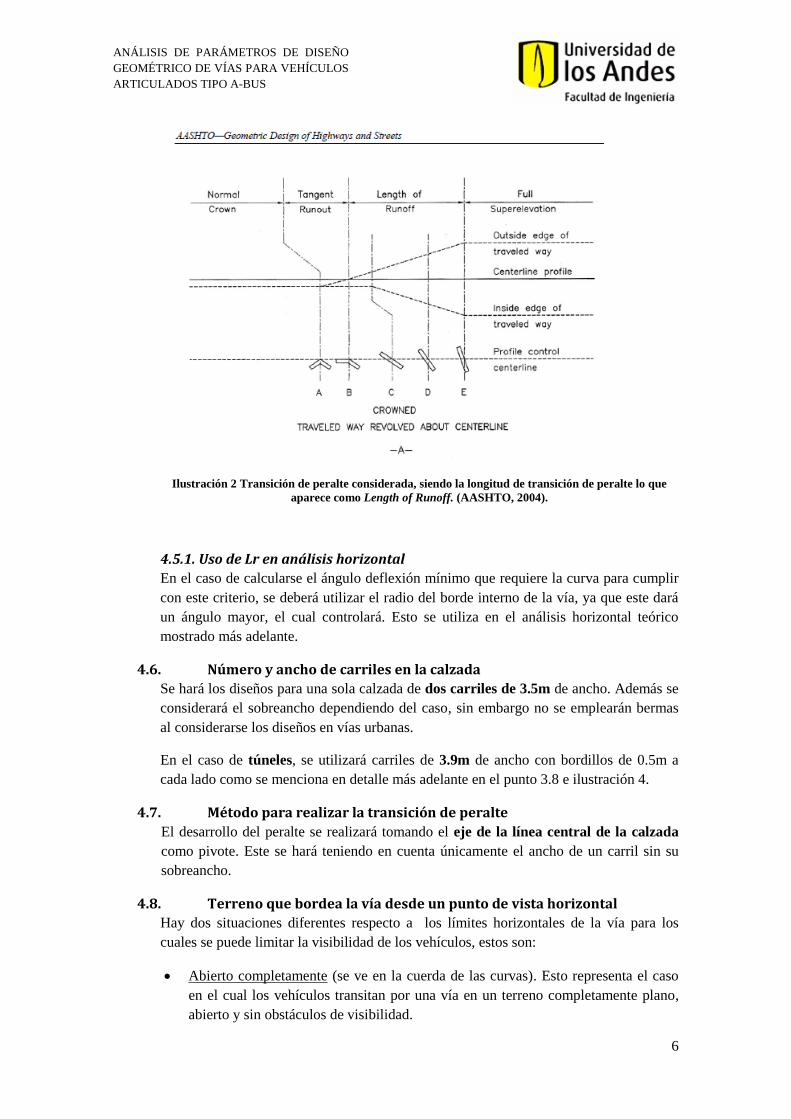
Esto se muestra en el diagrama de peralte de la siguiente ilustración, en el cual la
longitud de transición de peralte es el segmento que aparece como Length of Runoff.
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
6
Ilustración 2 Transición de peralte considerada, siendo la longitud de transición de peralte lo que
aparece como Length of Runoff. (AASHTO, 2004).
4.5.1. Uso de Lr en análisis horizontal
En el caso de calcularse el ángulo deflexión mínimo que requiere la curva para cumplir
con este criterio, se deberá utilizar el radio del borde interno de la vía, ya que este dará
un ángulo mayor, el cual controlará. Esto se utiliza en el análisis horizontal teórico
mostrado más adelante.
4.6. Número y ancho de carriles en la calzada
Se hará los diseños para una sola calzada de dos carriles de 3.5m de ancho. Además se
considerará el sobreancho dependiendo del caso, sin embargo no se emplearán bermas
al considerarse los diseños en vías urbanas.
En el caso de túneles, se utilizará carriles de 3.9m de ancho con bordillos de 0.5m a
cada lado como se menciona en detalle más adelante en el punto 3.8 e ilustración 4.
4.7. Método para realizar la transición de peralte
El desarrollo del peralte se realizará tomando el eje de la línea central de la calzada
como pivote. Este se hará teniendo en cuenta únicamente el ancho de un carril sin su
sobreancho.
4.8. Terreno que bordea la vía desde un punto de vista horizontal
Hay dos situaciones diferentes respecto a los límites horizontales de la vía para los
cuales se puede limitar la visibilidad de los vehículos, estos son:
Abierto completamente (se ve en la cuerda de las curvas). Esto representa el caso
en el cual los vehículos transitan por una vía en un terreno completamente plano,
abierto y sin obstáculos de visibilidad.
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
7
Cerrado completamente (sólo se ve dentro de la vía, máxima es tangente al borde
interno). Este caso representa el caso en el cual el vehículo transita por un túnel.
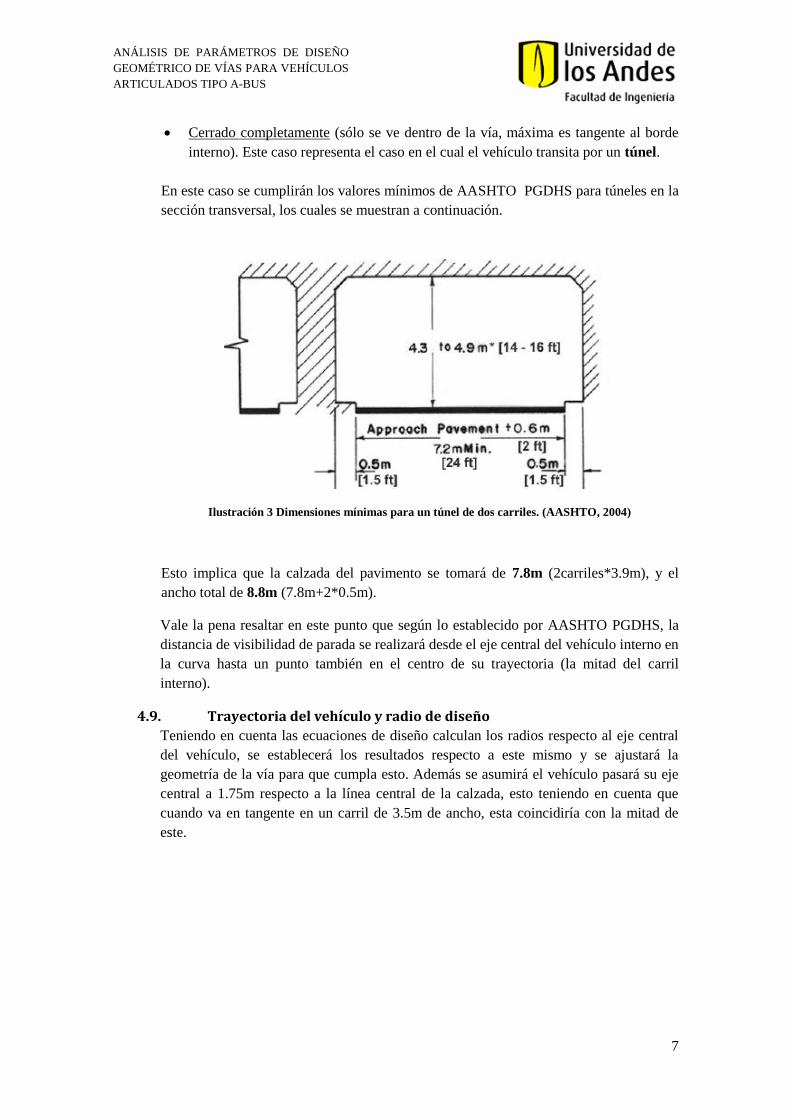
En este caso se cumplirán los valores mínimos de AASHTO PGDHS para túneles en la
sección transversal, los cuales se muestran a continuación.
Ilustración 3 Dimensiones mínimas para un túnel de dos carriles. (AASHTO, 2004)
Esto implica que la calzada del pavimento se tomará de 7.8m (2carriles*3.9m), y el
ancho total de 8.8m (7.8m+2*0.5m).
Vale la pena resaltar en este punto que según lo establecido por AASHTO PGDHS, la
distancia de visibilidad de parada se realizará desde el eje central del vehículo interno en
la curva hasta un punto también en el centro de su trayectoria (la mitad del carril
interno).
4.9. Trayectoria del vehículo y radio de diseño
Teniendo en cuenta las ecuaciones de diseño calculan los radios respecto al eje central
del vehículo, se establecerá los resultados respecto a este mismo y se ajustará la
geometría de la vía para que cumpla esto. Además se asumirá el vehículo pasará su eje
central a 1.75m respecto a la línea central de la calzada, esto teniendo en cuenta que
cuando va en tangente en un carril de 3.5m de ancho, esta coincidiría con la mitad de
este.
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
8
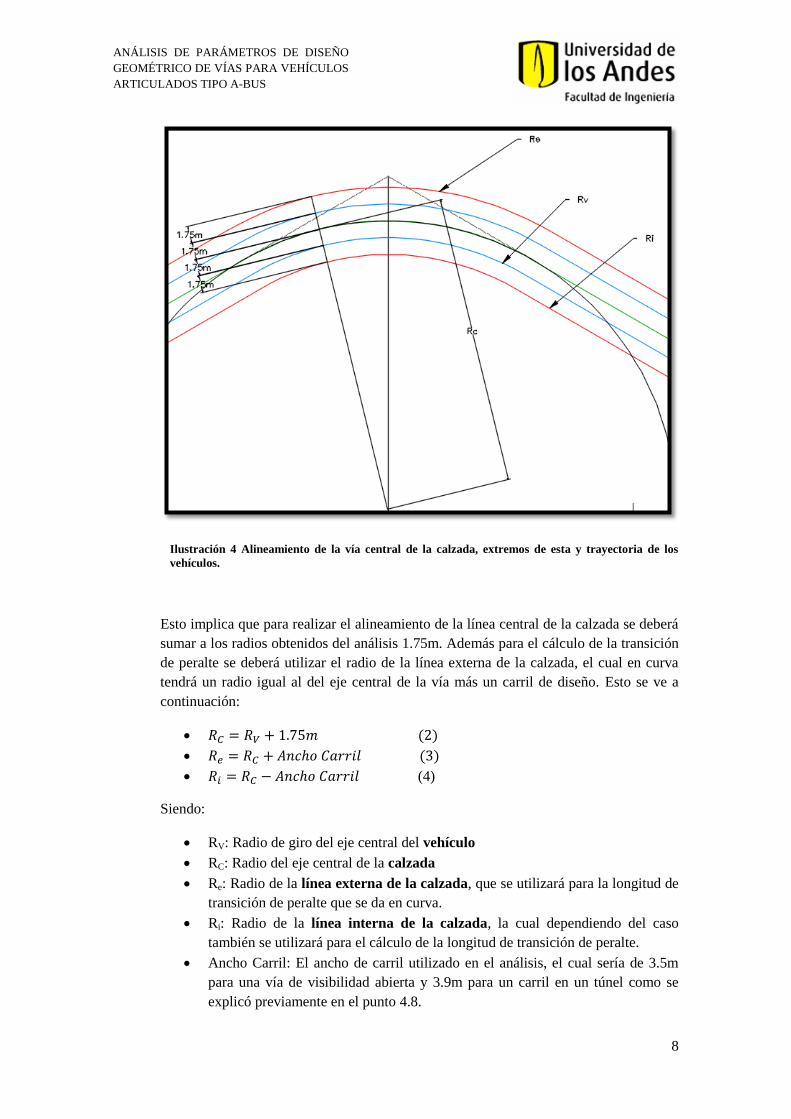
Ilustración 4 Alineamiento de la vía central de la calzada, extremos de esta y trayectoria de los
vehículos.
Esto implica que para realizar el alineamiento de la línea central de la calzada se deberá
sumar a los radios obtenidos del análisis 1.75m. Además para el cálculo de la transición
de peralte se deberá utilizar el radio de la línea externa de la calzada, el cual en curva
tendrá un radio igual al del eje central de la vía más un carril de diseño. Esto se ve a
continuación:
𝑅𝐶 = 𝑅𝑉 + 1.75𝑚 (2)
𝑅𝑒 = 𝑅𝐶 + 𝐴𝑛𝑐ℎ𝑜 𝐶𝑎𝑟𝑟𝑖𝑙 (3)
𝑅𝑖 = 𝑅𝐶 − 𝐴𝑛𝑐ℎ𝑜 𝐶𝑎𝑟𝑟𝑖𝑙 (4)
Siendo:
RV: Radio de giro del eje central del vehículo
RC: Radio del eje central de la calzada
Re: Radio de la línea externa de la calzada, que se utilizará para la longitud de
transición de peralte que se da en curva.
Ri: Radio de la línea interna de la calzada, la cual dependiendo del caso
también se utilizará para el cálculo de la longitud de transición de peralte.
Ancho Carril: El ancho de carril utilizado en el análisis, el cual sería de 3.5m
para una vía de visibilidad abierta y 3.9m para un carril en un túnel como se
explicó previamente en el punto 4.8.
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
9
4.10. Longitud de transición de peralte en curvas circulares
Se tomará que la longitud de transición de peralte (Lr) se da 2/3 en tangente y 1/3 en el
segmento circular para cada uno de los extremos de la curva circular. Esto se considera
es suficiente para un peralte máximo del 4%, permitiendo optimizar así las curvas a
analizar. Además este criterio permite no sea exagerada la proporción de la transición
en las tangentes, ya que un gran peralte en una vía recta podría perjudicar al conductor
cuando deba tomar velocidades menores a la de diseño, e incomodarlo en la maniobra
como se especifica en AASHTO PGDHS en la página 3-66 en Location with respect to
end of curve del capítulo de Tangent-to-Curve Transition (AASHTO, 2011).
4.11. Cálculo de distancia de visibilidad de parada
El cálculo de la distancia requerida para que el vehículo pueda frenar al aparecer un
objeto de 60cm de alto sobre su trayectoria se calcula utilizando las fórmulas 3-1, 3-2 y
3-3 especificadas en AASHTO PGDHS (AASHTO, 2004). El cálculo de la distancia de
reacción se calcula asumiendo el conductor dura 2.5s a velocidad de diseño en pisar el
freno una vez aparece el obstáculo, implicando que la distancia de reacción es:
𝐷𝑖𝑠𝑡𝑎𝑛𝑐𝑖𝑎 𝑑𝑒 𝑟𝑒𝑎𝑐𝑐𝑖ó𝑛 = 0.278 ∗ 𝑉 [𝑘𝑚
ℎ] ∗ 𝑡[𝑠] = 0.278 ∗ 𝑉 ∗ 2.5𝑠 = 0.695 ∗ 𝑉 (5)
Además la distancia requerida para frenar el vehículo una vez pisado el freno a una tasa
de desaceleración constante, se tiene la siguiente ecuación, la cual es deducida por
medio de las ecuaciones de cinemática para movimiento uniformemente acelerado,
teniendo en cuenta los factores por cambio de unidades, utilizando la velocidad de
diseño en km/h (V) y el efecto de la pendiente relativa del tramo en el que se frena (G).
Se utiliza una tasa da desaceleración (a) de 3.4m/s2 como sugiere el manual AASHTO
PGDHS (AASHTO, 2004).
𝑑 =𝑉2
254 ∗ (𝑎
9.81 ± 𝐺) (6)
Finalmente sumando ambas distancias de las Ecuaciones 5 y 6 se tiene que la distancia
de visibilidad de parada es:
𝐷𝑃 = 0.695 ∗ 𝑉 + 𝑑 (7)
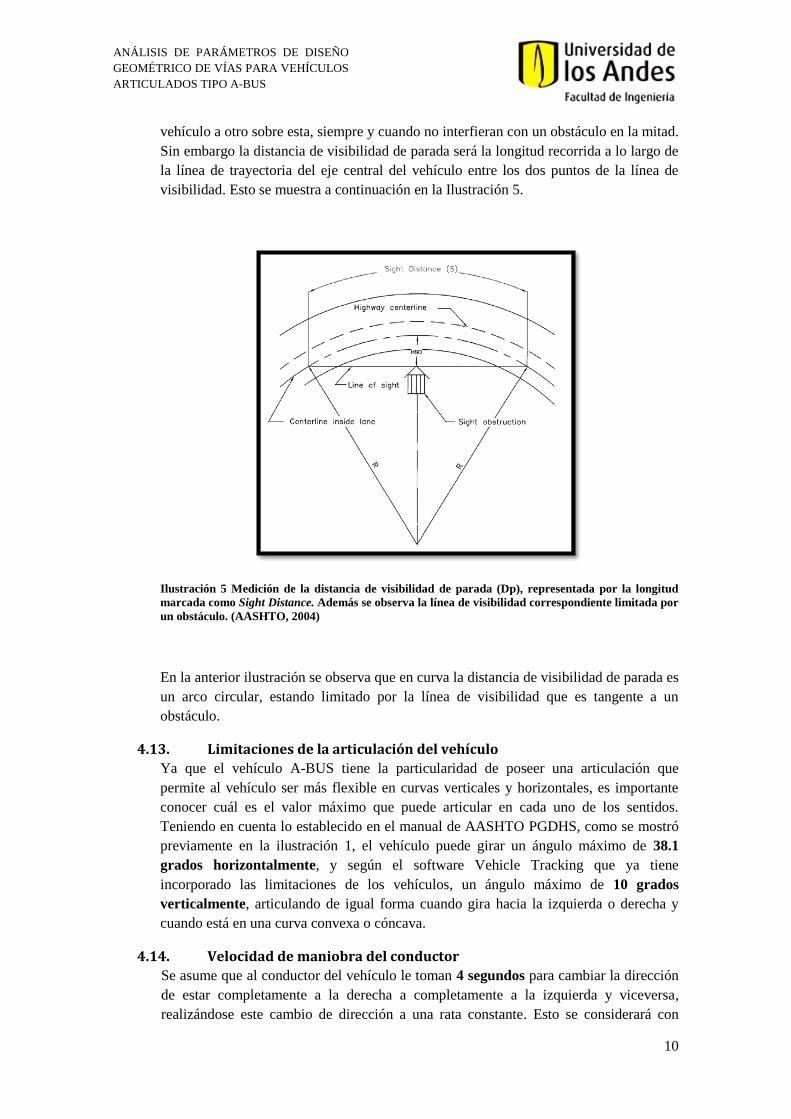
4.12. Medición de la distancia de visibilidad de parada
La medición de la distancia de visibilidad de parada se hará teniendo en cuenta las
líneas de visibilidad (rectas) llegan de un punto de la trayectoria del eje central del
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
10
vehículo a otro sobre esta, siempre y cuando no interfieran con un obstáculo en la mitad.
Sin embargo la distancia de visibilidad de parada será la longitud recorrida a lo largo de
la línea de trayectoria del eje central del vehículo entre los dos puntos de la línea de
visibilidad. Esto se muestra a continuación en la Ilustración 5.
Ilustración 5 Medición de la distancia de visibilidad de parada (Dp), representada por la longitud
marcada como Sight Distance. Además se observa la línea de visibilidad correspondiente limitada por
un obstáculo. (AASHTO, 2004)
En la anterior ilustración se observa que en curva la distancia de visibilidad de parada es
un arco circular, estando limitado por la línea de visibilidad que es tangente a un
obstáculo.
4.13. Limitaciones de la articulación del vehículo
Ya que el vehículo A-BUS tiene la particularidad de poseer una articulación que
permite al vehículo ser más flexible en curvas verticales y horizontales, es importante
conocer cuál es el valor máximo que puede articular en cada uno de los sentidos.
Teniendo en cuenta lo establecido en el manual de AASHTO PGDHS, como se mostró
previamente en la ilustración 1, el vehículo puede girar un ángulo máximo de 38.1
grados horizontalmente, y según el software Vehicle Tracking que ya tiene
incorporado las limitaciones de los vehículos, un ángulo máximo de 10 grados
verticalmente, articulando de igual forma cuando gira hacia la izquierda o derecha y
cuando está en una curva convexa o cóncava.
4.14. Velocidad de maniobra del conductor
Se asume que al conductor del vehículo le toman 4 segundos para cambiar la dirección
de estar completamente a la derecha a completamente a la izquierda y viceversa,
realizándose este cambio de dirección a una rata constante. Esto se considerará con
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
11
Vehicle Tracking de AutoCad Civil 3D, de tal forma las curvas tengan en cuenta el
proceso de cambio de dirección, ya que en las curvas circulares no se puede tomar el
ángulo requerido inmediatamente en el PC y PT.
Lo anterior implica que al conductor le tomarán 2 segundos pasar de estar con la
dirección en 0º a pasar a 38.1º, que es la dirección máxima como se observa en la
ilustración 1. De esta forma la tasa de cambio de dirección es:
𝑇𝐷 =38.1º
2𝑠= 𝟏𝟗. 𝟎𝟓º/𝒔
Finalmente la maniobra del conductor en una curva horizontal simple empieza en la
abscisa del punto PC y regresa a la dirección recta en el PT, garantizando así su eje
central frontal se mueva en el arco circular diseñado en estas curvas.
4.15. Sobreancho
Aunque el sobreancho se puede estimar por medio de las ecuaciones brindadas por la
AASHTO PGDHS en función de la geometría del vehículo, el radio de la curva y la
velocidad, estos valores obtenidos que buscan basarse en un análisis racional, poseen
ciertos parámetros empíricos que no se adaptan lo suficiente a ciertos casos (como el
parámetro ΣL2
para el cálculo de U, que para articulados difiere considerablemente).
Además, aunque incluye un sobreancho adicional por seguridad, que depende de la
velocidad del vehículo, no tiene en cuenta la maniobra del conductor considerada en el
punto anterior (4.14).
Debido a esto se obtendrá por medio del programa Vehicle Tracking los valores
realmente necesarios para los sobreanchos, los cuales darán valores menores que
permitirán optimizar el diseño y continuar garantizando la seguridad de los usuarios.
Además estos se comparan con los de AASHTO PGDHS en el análisis del capítulo
5.1.3.
4.15.1. Sobreancho con manual AASHTO PGDHS
Realizando el cálculo del sobreancho requerido en una curva siguiendo la metodología
del manual AASHTO PGDHS (AASHTO, 2004) y reemplazando los valores en
función del radio se tienen los siguientes resultados. El procedimiento completo
incluyendo los valores utilizados y ecuaciones parciales se muestra en el Anexo 10.5.1.
Se tiene que para curvas abiertas con un ancho en tangente de 7m el sobreancho es:
𝑆𝐴𝐴 = 2 ∗ ((2.59𝑚 + 𝑅 − √𝑅2 − 80.9235𝑚2) + (0.9)) + (√𝑅2 + 42.025 − 𝑅) + 0.1 ∗ (𝑉
√𝑅) − 7𝑚
Y para curvas en túneles con ancho de calzada en tangente de 7.8m es:
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
12
𝑆𝐴𝑇 = 2 ∗ ((2.59𝑚 + 𝑅 − √𝑅2 − 80.9235𝑚2) + (0.9)) + (√𝑅2 + 42.025 − 𝑅) + 0.1 ∗ (𝑉
√𝑅) − 7.8𝑚
4.15.2. Sobreancho con Vehicle Tracking
Para obtener el sobreancho requerido de la vía en curvas horizontales, se empleó el
programa Vehicle Tracking en conjunto con AutoCad Civil 3D, de tal forma no fuera
necesario utilizar el valor del proceso semi-empírico de AASHTO PGDHS
anteriormente mostrado, sino el valor realmente necesario obtenido por este programa
que modela la trayectoria de los vehículos con sus envolventes de espacio ocupado.
Estos por medio del proceso que se explica en detalle en el Anexo 10.5.2 permiten
obtener a partir del ancho en curva del vehículo en curva por Vehicle Tracking UV que
se calcula en el capítulo 5.1.3 el ancho en curva por medio de la Ecuación 8, que tiene
en cuenta los dos carriles en la calzada.
𝑊𝑐 = 2 ∗ (𝑈𝑉 + 0.9𝑚) (8)
Reemplazándolo para obtener el sobreancho, se tiene la Ecuación 9 para una curva con
el campo de visión abierto:
𝑆𝐴𝐴𝑉 = 2 ∗ (𝑈𝑉 + 0.9𝑚) − 7𝑚 (9)
Y para un túnel la Ecuación 10:
𝑆𝐴𝑇𝑉 = 2 ∗ (𝑈𝑉 + 0.9𝑚) − 7.8𝑚 (9)
Como se observa, este no incluye el factor de seguridad Z que se utiliza en el cálculo del
sobreancho por el método AASHTO PGDHS, lo cual se hace debido a que como se verá
posteriormente en el análisis de sobreanchos con Vehicle Tracking, ya se tiene en
cuenta la velocidad a la que transita el vehículo, la cual se limita para las curvas según
el radio.
4.16. Longitud de transición de sobreancho
Aunque por lo general se recomienda que la transición del sobreancho se haga en el mismo
tramo que el peralte, desarrollándose linealmente en la longitud Lr y empezando 2/3Lr antes
del punto PC, se observará más adelante que se demuestra que esta suposición no es válida
para todos los casos. Debido a esto se sigue el procedimiento recomendado de cálculo de
esta distancia que se muestra en los análisis.

ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
13
4.17. Tipo de curvas verticales
Se utilizarán curvas parabólicas simétricas para el alineamiento vertical, lo que implica que
el PCV (punto del comienzo de curva vertical) y PTV (punto en el que termina curva
vertical) estarán igualmente distanciados en abscisas del punto en el que coinciden las
tangentes del alineamiento vertical PIV. Las curvas verticales tienen un comportamiento
parabólico, teniendo en cuenta que su cambio de pendiente antes un cambio en las abscisas
es lineal. Estas como se mencionó previamente realizan este cambio constante de pendiente
en la longitud de curva vertical, creando una parábola tangente a las dos rectas tangentes
que coinciden en el PIV.
Planteando un origen para el plano de coordenadas en el punto en el cual inicia la curva
vertical, el eje horizontal X representa la abscisa del alineamiento horizontal, y el eje
vertical Y la altura. Al ser constante el cambio de pendiente se sabe que la segunda derivada
de Y respecto a X debe ser este cambio, el cual se da en la distancia de LCV. Cabe resaltar
que A es la diferencia algebraica de pendientes de las dos rectas que serán unidas por la
curva.
𝑑2𝑦
𝑑𝑥2=
𝐴
𝐿𝐶𝑉 (10)
La cual al integrarse da la pendiente de la curva, la cual se puede conocer reemplazando el
valor de la pendiente de entrada i1 para un valor de X de 0 para conocer el valor de la
constante de integración, dando como resultado:
𝑑𝑦
𝑑𝑥=
𝐴
𝐿𝐶𝑉∗ 𝑥 + 𝑖1 (11)
Finalmente al integrarse la función de la pendiente se conoce los puntos de la curva,
reemplazando un valor de Y de 0 para un valor de X de 0, se puede conocer la constante de
integración, siendo la función parabólica:
𝑦 =𝐴
2 ∗ 𝐿𝐶𝑉∗ 𝑥2 + 𝑖1 ∗ 𝑥 (12)
4.18. Obtención de la longitud de curva vertical LCV
Para poder determinar la curva parabólica explicada en el anterior punto es necesario
establecer el valor apropiado de la longitud de curva vertical (LCV), teniendo en cuenta
que a lo largo de esta se realizará el cambio de pendiente del alineamiento, siendo más
segura en términos de distancia de visibilidad de parada y de solicitaciones geométricas
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
14
para el vehículo entre mayor sea su longitud. Existen dos ecuaciones que permiten conocer
los valores de esta para curvas cóncavas y convexas, teniendo que se debe cumplir con Dp
para cada uno de los puntos de la curva. Estas ecuaciones tienen se basan en las de
AASHTO PGDHS 3-41 y 3-42 (AASHTO, 2004) y consideraciones adicionales del
Manual de Diseño Geométrico de Carreteras (INVIAS, 2008).
4.18.1 Curvas Convexas
Teniendo en cuenta una altura de la vista del conductor de 1.08m y que la altura del objeto
que determina Dp es de 0.6m, las ecuaciones son:
Para Dp>LCV
𝐿𝐶𝑉 =|𝐴| ∗ 𝐷𝑝2
658 (12)
Para Dp<LCV
𝐿𝐶𝑉 = 2 ∗ 𝐷𝑝 −658
|𝐴| (13)
4.18.2 Curvas Cóncavas
A diferencia de las cóncavas, aunque considera la misma altura del objeto de 0.6m, se tiene
en cuenta el ángulo de divergencia de las luces de 1º, ya que aunque durante el día es
posible ver en este tipo de curvas, en la noche esta se limitará por lo iluminado a través de
las luces del vehículo. Con las consideraciones anteriores las ecuaciones para curvas
cóncavas son:
Para Dp>LCV
𝐿𝐶𝑉 =|𝐴| ∗ 𝐷𝑝2
120 + 3.5 ∗ 𝐷𝑝 (14)
Para Dp<LCV
𝐿𝐶𝑉 = 2 ∗ 𝐷𝑝 −120 + 3.5 ∗ 𝐷𝑝
|𝐴| (15)
4.18.3 Limitantes adicionales
Al calcular los anteriores valores se suelen realizar unas verificaciones adicionales de LCV,
las cuales se traducen en valores mínimos y máximos para esta por criterios adicionales a
los de visibilidad.
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
15
4.18.3.1 Criterio de Operación
Este criterio busca evitar que el usuario tenga la impresión de un cambio súbito de
pendiente, por lo que establece un mínimo de LCV basado en la velocidad de diseño de
forma proporcional a esta.
𝐿𝐶𝑉𝑚𝑖𝑛[𝑚] = 0.6 ∗ 𝑉𝑑 [𝑘𝑚
ℎ] (16)
4.18.3.2 Criterio de drenaje
Con este criterio se procura garantizar exista una inclinación mínima que permita que la vía
pueda tener condiciones adecuadas de drenaje, estableciendo así un valor máximo para
LCV.
𝐿𝐶𝑉𝑚á𝑥[𝑚] = 50 ∗ |𝐴| (17)
Este criterio podría limitar curvas muy extensas o de cambio de pendiente muy bajos, los
cuales en los análisis nunca se tendrán, debido a que el objetivo de estos será analizar
curvas con LCV pequeños y A altos.
4.18.3.3 Condición mínima de estética
Además para garantizar las carreteras y vías tengan cierta estética estándar, se establece
según el Manual de Diseño Geométrico de Carreteras (INVIAS, 2008), las curvas deben
tener una longitud mínima de 20m.
𝐿𝐶𝑉 ≥ 20𝑚 (18)
Aunque esta condición se establece principalmente para carreteras en las cuales se busca
que las curvas presenten cierto grado de homogeneidad, para cambios de pendiente en
ámbitos urbanos se podría esperar que no sea estrictamente necesario aplicarlo, ya que en
este contexto es normal que los usuarios conduzcan realizando diferentes maniobras y para
el caso de vehículos articulados de sistema de transporte podría predominar el espacio
reducido que se tiene frente a la estética de las curvas.
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
16
5. ANÁLISIS DE PARÁMETROS DE DISEÑO
A continuación se explicará cada uno de los análisis que se realizarán en el proyecto de tal
forma se pueda sacar de forma analítica, y con ayuda de herramientas como AutoCad Civil 3D y
Vehicle Tracking conclusiones importantes respecto al diseño geométrico de vehículos
articulados tipo A-BUS.
Se realizaron análisis de curvas horizontales y verticales de tal forma se pudiera obtener
conclusiones para cada una de estas, teniendo en cuenta la visibilidad de los vehículos, las
limitaciones geométricas que se representan en mínimos para radios, sobreanchos, longitudes de
curva vertical, etc. De esta forma se podrá reconocer si el diseño para este tipo de vehículos A-
BUS requiere mayores limitaciones a las establecidas por el manual AASHTO PGDHS. Para
cada uno de los análisis realizados se explicará el objetivo, los fundamentos en los cuales se
basó cada uno de sus pasos y los resultados obtenidos.
5.1. ANÁLISIS HORIZONTAL
En este análisis se busca poder sacar conclusiones respecto a la inclusión en conjunto de los
requisitos que se deben cumplir para el diseño de curvas horizontales circulares simples. Se
busca encontrar los valores de las variables de diseño que garantizan se pueda realizar un diseño
adecuado, encontrando sus valores máximos y mínimos en conjunto, teniendo en cuenta la
dependencia que tienen entre sí.
Se busca hacer los análisis de tal forma se cumplan los criterios de diseño, como lo es la
apropiada distancia de visibilidad de parada, la transición del peralte, mantener la velocidad de
diseño dos segundos en curva, el espacio necesario para el tránsito del vehículo a lo largo del
alineamiento (incluyendo el tiempo de maniobra y movimiento de la articulación para tomar la
posición de giro y el sobreancho requerido), y equilibrio de la aceleración centrípeta producida
en curva para que se den las condiciones tales que no se disminuya ni aumente la velocidad de
diseño.
Además se analizará los vehículos para los casos en los que recorren una túnel, en el cual la
configuración de los muros establece límites diferentes para la visibilidad del vehículo a los que
se presentarían en una vía abierta, siendo esta más reducida e implicando mayores restricciones
en el alineamiento horizontal.
5.1.1 Tipos de análisis horizontales
Para poder hallar conclusiones respecto a las curvas horizontales y sus variables, se harán cuatro
análisis diferentes, buscando determinar las limitaciones geométricas del vehículo, optimizar los
sobreanchos en curva con la herramienta Vehicle Tracking, determinar las deflexiones máximas
y mínimas en túneles de forma teórica teniendo en cuenta los criterios de longitud de desarrollo
de peralte y distancia de visibilidad, y finalmente una verificación y comparación con los
resultados de visibilidad en túneles realizados con AutoCad Civil 3D.
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
17
1. Punto de equilibrio de criterio de fuerza centrípeta y geometría del vehículo: Se
encuentra la velocidad máxima a la cual la geometría del vehículo controla los diseños
según su radio de giro.
2. Estudio analítico: utilizando fórmulas geométricas que se aproximen lo mayor posible a
las relaciones geométricas de las curvas, y limitaciones de peralte y visibilidad que
gobiernen los diseños, se busca encontrar los valores de las variables en los puntos
críticos, en los cuales pasa de gobernar un criterio de diseño a otro, encontrando
además el rango de posibles diseños que se pueden obtener para cada caso.
Este análisis permitirá llegar a resultados puntuales sin necesidad de realizar iteraciones
excesivas que se requerirían en un análisis gráfico con software, utilizando las fórmulas
y procedimiento estipulado en AASHTO PGDHS.
3. Análisis de sobreancho y limitaciones del vehículo para transitar en curvas: Se obtienen
resultados respecto al sobreancho requerido por los vehículos en curvas según su radio,
analizando las velocidades máximas para transitar en estas y las longitudes de
desarrollo de sobreancho.
Se encuentran fórmulas para calcular el ancho en curva de forma optimizada, de tal
forma se tenga el sobreancho necesario. También se obtiene las longitudes de
desarrollo de sobreancho por medio de fórmulas, observando que su transición no
siempre se puede dar en el mismo tramo que para el desarrollo del peralte.
Finalmente se comparan los resultados de ancho en curva por el método optimizado y
las fórmulas de AASHTO PGDHS, cuantificando el espacio que se puede ahorrar con
la utilización de los resultados con Vehicle Tracking.
4. Análisis gráfico: utilizando AutoCad Civil 3D se busca corroborar y analizar de forma
gráfica los casos del primer análisis y encontrar resultados adicionales de visibilidad en
túneles a los del análisis teórico. Se observa la abscisa en la cual se tiene menor
distancia de visibilidad en una curva horizontal en un túnel y el comportamiento de esta
a lo largo de la trayectoria.
5.1.1. PUNTO DE EQUILIBRIO DE CRITERIOS DE ACELERACIÓN CENTRÍPETA Y
GEOMETRÍA DEL VEHÍCULO
Se obtiene la velocidad para la cual el radio mínimo por geometría del vehículo (obtenido de
la figura 3-9 de AASHTO PGDHS la cual muestra Minimum Turning Path for Articulated Bus
(A-Bus) Design Vehicle) en la Ilustración 1, coincide con el radio mínimo que se calcula con
la ecuación de balance de fuerzas ante la aceleración centrípeta en la curva sobre el
vehículo, ecuación 3-8 de AASHTO PGDHS. La finalidad de esto es encontrar el punto en el
cual pasa de gobernar un criterio respecto al otro sin intervenir aun el criterio por distancia de
visibilidad de parada.

ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
18
Esto se realizó iterando con el programa Vehicle Tracking la velocidad de diseño con un peralte
del 4%, hasta obtener un radio mínimo AASHTO PGDHS que diera el mismo valor que el radio
de giro mínimo. Esto se realizó conociendo que el programa ya posee la información de la
norma AASHTO PGDHS integrada, con la cual ajusta el factor de fricción f a la velocidad
determinada.
5.1.1.1. Resultados
Teniendo en cuenta el vehículo tiene un radio de giro mínimo de 10.82m respecto al centro de
su eje delantero, se encontró la velocidad a la cual este sería el radio mínimo por la dinámica
de la fuerza centrípeta según AASHTO. Esta resultó ser de 23.15km/h. Esto implica que para
velocidades menores a esta la fuerza centrípeta no dominará el diseño, sino que lo hará la
geometría del vehículo necesariamente.
Ilustración 6 Resultado obtenido con Vehicle Tracking, utilizando la norma AASHTO para calcular el radio
de diseño mínimo por el criterio de aceleración centrípeta. En este se observa que para una velocidad de
23.15km/h el radio mínimo de diseño es 10.82m.
5.1.1.2. Conclusiones
Esta velocidad de 23.15km/h marcaría para curvas espiralizadas el punto máximo hasta el cual
dominaría la geometría del vehículo, al esperarse el vehículo llegue a la zona circular (EC) ya
con la dirección y el ángulo de conducción requerido, sin tener que maniobrar dentro de la zona
circular. Sin embargo en el caso de curvas circulares simples, se debe verificar para
velocidades mayores a 23.15km/h cuándo controla la geometría del vehículo, ya que va a haber
cambio en la posición de la articulación y en la dirección del vehículo dentro del segmento
circular (al no haber una curva de transición que permita variar el radio de infinito al del
segmento circular de forma paulatina), lo cual podría requerir un radio mayor de giro para
mantener esta velocidad.
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
19
5.1.2. ESTUDIO ANALÍTICO
Este análisis se hace de tal forma cada uno de los resultados se haga de forma numérica y
teórica a partir de ecuaciones geométricas que gobiernan los criterios a analizar utilizando los
criterios y fórmulas utilizadas por AASHTO PGDHS.
5.1.2.1. Objetivo
El objetivo de este primer análisis es ver qué condiciones controlan los diseños, teniendo en
cuenta se cumpla con la máxima aceleración centrípeta del vehículo, la longitud de desarrollo de
peralte, la distancia de visibilidad de parada y las limitaciones geométricas del vehículo ante
solicitaciones horizontales.
Se tendrá una tabla que muestre si utilizando los radios mínimos AASHTO PGDHS para cada
velocidad se cumple la longitud de transición de peralte y la visibilidad necesaria en un túnel.
Por cada velocidad se obtendrá el ángulo de deflexión mínimo requerido para que se cumpla le
longitud de transición de peralte, y el delta máximo para cumplir con la distancia de
visibilidad de parada (en el caso de un túnel).
La tabla tendrá los siguientes resultados o involucrará las siguientes consideraciones entre
varios:
Velocidad de diseño
Radio mínimo AASHTO PGDHS
Deflexión mínima por criterio de peralte
Deflexión máxima por criterio de distancia de visibilidad de parada
Afirmación respecto al cumplimiento de los criterios de forma simultánea y su rango de
valores.
5.1.2.2. Valores de entrada asumidos y simplificaciones
El radio mínimo AASHTO PGDHS se utiliza como RV, al ser este deducido para el
centroide del vehículo.
Número de carriles y configuración de la calzada: Se toma como una calzada de dos
carriles de 3.9m, y bordillos de 0.5m como se mostró previamente para el análisis de
túneles. Para el caso en el que la vía no está en un túnel sino abierta, se tomará como
una calzada de dos carriles de 3.5m
Se hallará la distancia de visibilidad mínima que es tangente al muro del túnel en el L/3
central de la curva circular. Esto implica que el radio del muro tendrá incluido el
sobreancho total. Este criterio se utilizará como una aproximación para analizar si la
distancia de visibilidad de parada se cumple.
5.1.2.3. Procedimiento y Teoría
Se explicará a continuación los cálculos realizados, los cuales se realizaron en una hoja de
cálculo y macros del programa Excel. Además se mostrará en el proceso las deducciones hechas
con geometría para calcular diferentes casos para la distancia de visibilidad de parada.
1. Definir cada velocidad
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
20
2. Obtener el factor de ajuste por varios carriles (bw) Tabla 3-16 Adjustment Factor for
Number of Lanes Rotated de AASHTO PGDHS. Al levantarse un ancho
correspondiente a un solo carril, por ser el pivote de giro el eje central de la vía, este
tendrá un valor de 1.
3. Definir el cambio de peralte máximo teniendo en cuenta Tabla 3-15 Maximum
Relative Gradients de AASHTO PGDHS (AASHTO, 2004). En el caso de velocidades
que no aparecen en las tablas, se interpoló (como se sugiere en AASHTO PGDHS que
se haga).
4. Obtener la distancia requerida para que el vehículo transite al menos 2 segundos a la
velocidad de diseño a lo largo del segmento circular, multiplicando la velocidad por el
tiempo y convirtiendo las unidades a metros.
5. Obtener la longitud mínima requerida de transición de peralte utilizando la fórmula
3-23 de AASHTO PGDHS (AASHTO, 2004).
6. Obtener la longitud circular mínima requerida para que se presente 1/3 de la longitud
de transición de peralte en cada extremo de esta, más la distancia equivalente a 2
segundos a la velocidad de diseño. Esta es llamada longitud circular mínima de peralte
(LCminperalte).
7. Obtener el ángulo de deflexión delta mínimo para el criterio de peralte ΔPeralte,
sabiendo ya el radio de giro y la longitud de curva circular. Para esto se utiliza el radio
interno de la vía el cual al ser menor, brinda un ángulo de deflexión mayor como se
mencionó previamente en el capítulo 4.5.1.
8. Se define una columna en la cual se utilizará la pendiente crítica (mayor pendiente del
tramo que determinará la distancia de visibilidad de parada) en el caso en el que la
curva tenga inclinación, la cual en este caso tendrá un valor de 0 para todos los casos,
sin embargo posteriormente se pensará utilizar con diferentes valores cuando se realice
el análisis en conjunto con curvas verticales.
9. Se calcula la distancia de visibilidad de parada, la cual variará según cada velocidad y
la pendiente crítica como se especifica en el capítulo 4.12.
10. Se calcula el sobreancho máximo de la curva utilizando el procedimiento de AASHTO
PGDHS (capítulo 4.15.1), teniendo en cuenta en este análisis se busca encontrar
resultados únicamente con la aplicación de esta norma sin utilizar Vehicle Tracking o
Civil 3D.
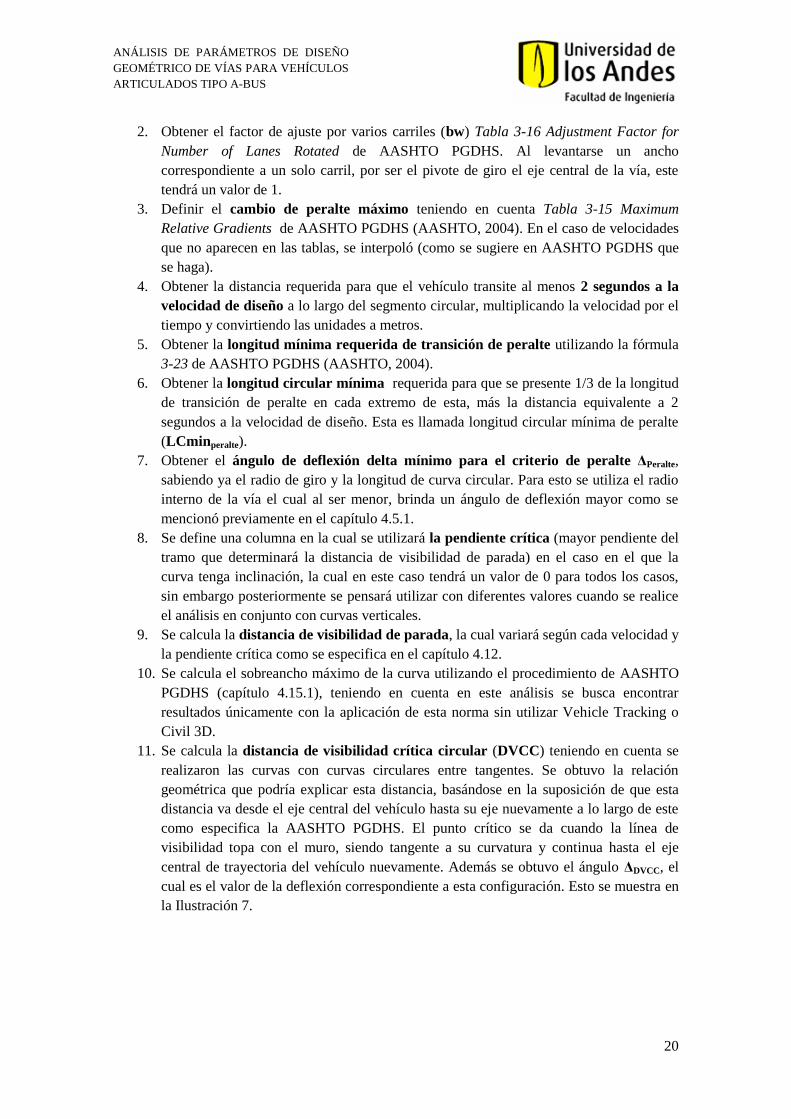
11. Se calcula la distancia de visibilidad crítica circular (DVCC) teniendo en cuenta se
realizaron las curvas con curvas circulares entre tangentes. Se obtuvo la relación
geométrica que podría explicar esta distancia, basándose en la suposición de que esta
distancia va desde el eje central del vehículo hasta su eje nuevamente a lo largo de este
como especifica la AASHTO PGDHS. El punto crítico se da cuando la línea de
visibilidad topa con el muro, siendo tangente a su curvatura y continua hasta el eje
central de trayectoria del vehículo nuevamente. Además se obtuvo el ángulo ΔDVCC, el
cual es el valor de la deflexión correspondiente a esta configuración. Esto se muestra en
la Ilustración 7.
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
21
Ilustración 7 Geometría para obtener la distancia de visibilidad circular crítica (DVCC) y la
deflexión correspondiente ΔDVCC. El círculo externo representa la trayectoria del eje central del
vehículo que transita por el carril interno, y el círculo interno el muro que limita la visibilidad.
La distancia DVCC sería la distancia de visibilidad máxima que puede tener el
conductor, cuando se tiene un ángulo de deflexión igual o superior al ΔDVCC,
nuevamente recordando la suposición de que el muro en ese punto en el que topa la
visibilidad, tiene el sobreancho total.
Las fórmulas que describen estos valores en función del radio de trayectoria del
vehículo (R), y el radio del muro cuando obstruye la visibilidad (r) son:
∆𝐷𝑉𝐶𝐶
2= cos−1 (
𝑟
𝑅) (19)
𝐷𝑉𝐶𝐶 = ∆𝐷𝑉𝐶𝐶(𝑅𝑎𝑑𝑖𝑎𝑛𝑒𝑠) ∗ 𝑅 (20)
Vale la pena resaltar que el radio del muro (r), se calculó quitándole al radio central de
la calzada RC, 3.9m del carril interno, 0.5m del bordillo adicional y la mitad del
sobreancho máximo, ya que este será repartido para cada uno de los carriles.
12. Se mira si se cumple la distancia de visibilidad, lo cual pasa si DVCC es mayor a
Dp. Además se mira en caso de faltar distancia para que el criterio se cumpla, cuánto
falta y el porcentaje que este representa de Dp.
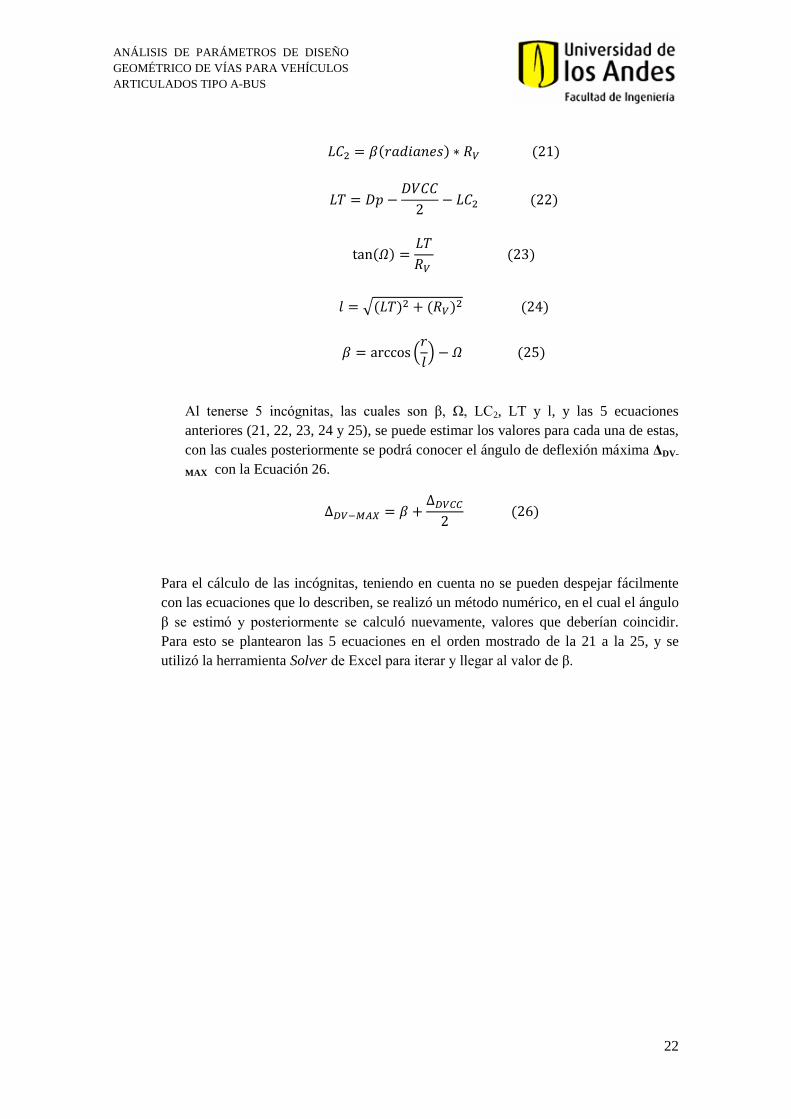
13. Para aquellos casos en los que DVCC no cumple, se estima el ángulo de deflexión
máximo que permitirá se tenga la distancia de visibilidad de parada apropiada, siendo
llamado ΔDV-MAX. Para que se cumpla esta distancia Dp, esta debe estar compuesta por
un arco circular pero además por una recta tangente a este como se muestra en la
siguiente ilustración. Se observa que para un ángulo de deflexión menor a ΔDVCC/2
siempre se cumplirá con la distancia de visibilidad, ya que la vista del conductor nunca
topará con el muro mientras busque mirar a su línea de trayectoria. Las ecuaciones que
se pueden deducir por geometría a partir de la figura son:
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
22
𝐿𝐶2 = 𝛽(𝑟𝑎𝑑𝑖𝑎𝑛𝑒𝑠) ∗ 𝑅𝑉 (21)
𝐿𝑇 = 𝐷𝑝 −𝐷𝑉𝐶𝐶
2− 𝐿𝐶2 (22)
tan(𝛺) =𝐿𝑇
𝑅𝑉 (23)
𝑙 = √(𝐿𝑇)2 + (𝑅𝑉)2 (24)
𝛽 = arccos (𝑟
𝑙) − 𝛺 (25)
Al tenerse 5 incógnitas, las cuales son β, Ω, LC2, LT y l, y las 5 ecuaciones
anteriores (21, 22, 23, 24 y 25), se puede estimar los valores para cada una de estas,
con las cuales posteriormente se podrá conocer el ángulo de deflexión máxima ΔDV-
MAX con la Ecuación 26.
Δ𝐷𝑉−𝑀𝐴𝑋 = 𝛽 +∆𝐷𝑉𝐶𝐶
2 (26)
Para el cálculo de las incógnitas, teniendo en cuenta no se pueden despejar fácilmente
con las ecuaciones que lo describen, se realizó un método numérico, en el cual el ángulo
β se estimó y posteriormente se calculó nuevamente, valores que deberían coincidir.
Para esto se plantearon las 5 ecuaciones en el orden mostrado de la 21 a la 25, y se
utilizó la herramienta Solver de Excel para iterar y llegar al valor de β.
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
23
Ilustración 8 Geometría para hallar máximo ángulo de deflexión teniendo en cuenta Dp desde el
punto PC de la curva.
14. Teniendo en cuenta se tiene ya el ángulo mínimo requerido para el criterio de peralte
ΔPeralte y el ángulo máximo ΔDV-MAX, se mira si existe un rango de posibles deflexiones
en las que se cumplan ambos criterios. Para esto ΔDV-MAX debe ser mayor o igual a
ΔPeralte por lo menos.
15. Se observa la diferencia entre los dos límites mencionados anteriormente, de tal forma
se pueda tener una idea de lo cercano que están a medida que cambia la velocidad de
diseño.
5.1.2.4. Resultados y Conclusiones
En cada una de las etapas del análisis teórico se obtuvieron ciertas conclusiones, las cuales serán
enseñadas en orden.
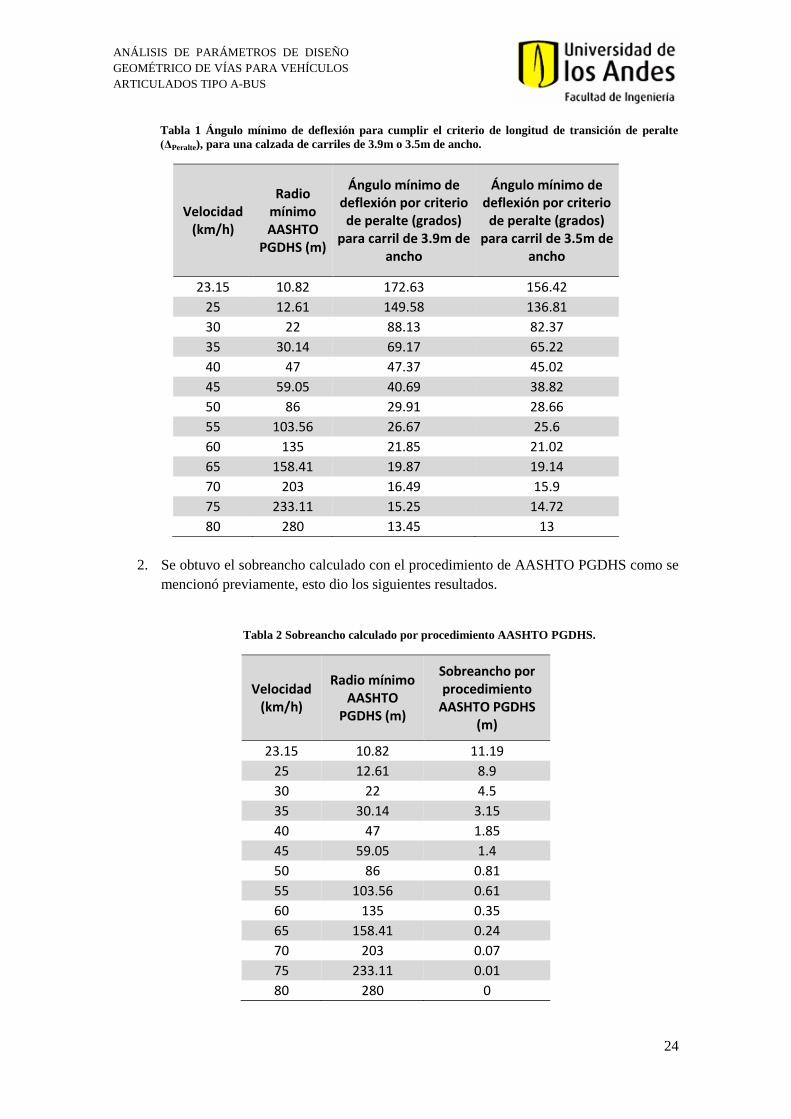
1. Se observó que para el cálculo más exacto del ángulo de deflexión mínimo para peralte
ΔPeralte, se debe considerar el radio de la línea interna de la calzada Ri, al este cambiar su
pendiente más rápidamente que la línea externa con radio mayor. Sin embargo se debe
tener en cuenta que la distancia debe incluir el cambio de peralte del 0 al emax de la línea
externa de la calzada. Se obtiene que los ángulos mínimos de deflexión por este criterio
son:
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
24
Tabla 1 Ángulo mínimo de deflexión para cumplir el criterio de longitud de transición de peralte
(ΔPeralte), para una calzada de carriles de 3.9m o 3.5m de ancho.
Velocidad (km/h)
Radio mínimo AASHTO
PGDHS (m)
Ángulo mínimo de deflexión por criterio de peralte (grados)
para carril de 3.9m de ancho
Ángulo mínimo de deflexión por criterio de peralte (grados)
para carril de 3.5m de ancho
23.15 10.82 172.63 156.42
25 12.61 149.58 136.81
30 22 88.13 82.37
35 30.14 69.17 65.22
40 47 47.37 45.02
45 59.05 40.69 38.82
50 86 29.91 28.66
55 103.56 26.67 25.6
60 135 21.85 21.02
65 158.41 19.87 19.14
70 203 16.49 15.9
75 233.11 15.25 14.72
80 280 13.45 13
2. Se obtuvo el sobreancho calculado con el procedimiento de AASHTO PGDHS como se
mencionó previamente, esto dio los siguientes resultados.
Tabla 2 Sobreancho calculado por procedimiento AASHTO PGDHS.
Velocidad (km/h)
Radio mínimo AASHTO
PGDHS (m)
Sobreancho por procedimiento
AASHTO PGDHS (m)
23.15 10.82 11.19
25 12.61 8.9
30 22 4.5
35 30.14 3.15
40 47 1.85
45 59.05 1.4
50 86 0.81
55 103.56 0.61
60 135 0.35
65 158.41 0.24
70 203 0.07
75 233.11 0.01
80 280 0
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
25
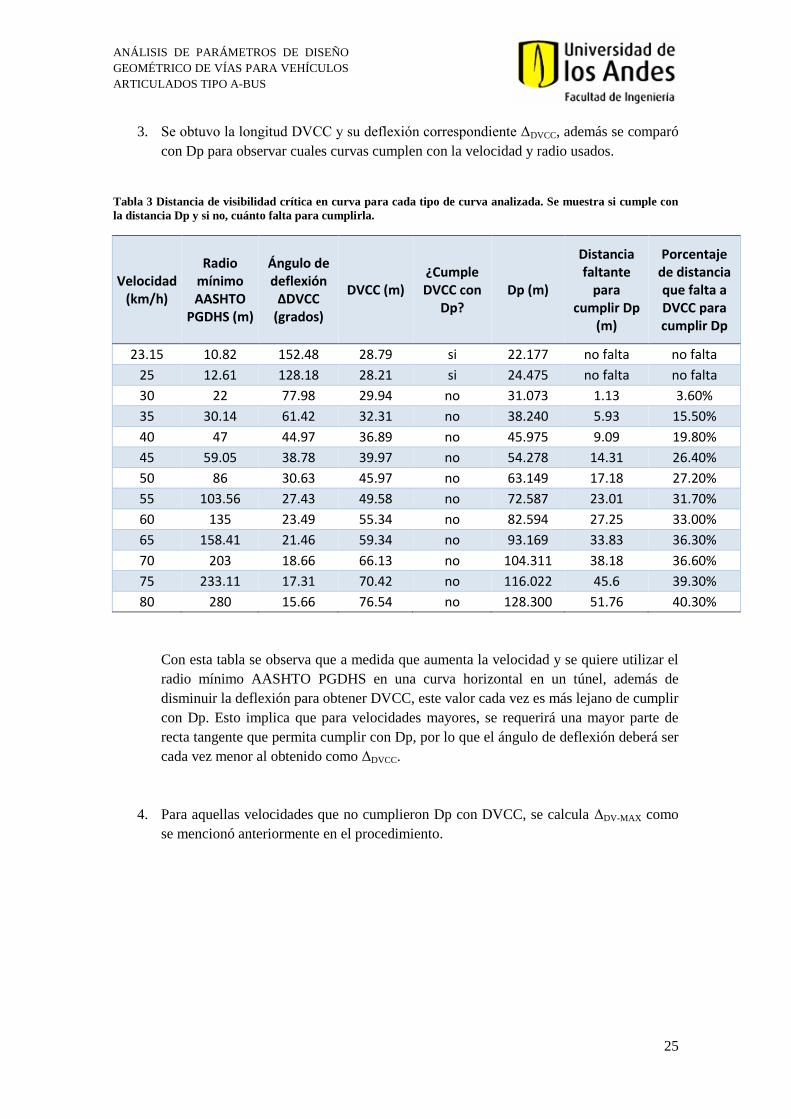
3. Se obtuvo la longitud DVCC y su deflexión correspondiente ΔDVCC, además se comparó
con Dp para observar cuales curvas cumplen con la velocidad y radio usados.
Tabla 3 Distancia de visibilidad crítica en curva para cada tipo de curva analizada. Se muestra si cumple con
la distancia Dp y si no, cuánto falta para cumplirla.
Velocidad (km/h)
Radio mínimo AASHTO
PGDHS (m)
Ángulo de deflexión
ΔDVCC (grados)
DVCC (m) ¿Cumple DVCC con
Dp? Dp (m)
Distancia faltante
para cumplir Dp
(m)
Porcentaje de distancia que falta a DVCC para cumplir Dp
23.15 10.82 152.48 28.79 si 22.177 no falta no falta
25 12.61 128.18 28.21 si 24.475 no falta no falta
30 22 77.98 29.94 no 31.073 1.13 3.60%
35 30.14 61.42 32.31 no 38.240 5.93 15.50%
40 47 44.97 36.89 no 45.975 9.09 19.80%
45 59.05 38.78 39.97 no 54.278 14.31 26.40%
50 86 30.63 45.97 no 63.149 17.18 27.20%
55 103.56 27.43 49.58 no 72.587 23.01 31.70%
60 135 23.49 55.34 no 82.594 27.25 33.00%
65 158.41 21.46 59.34 no 93.169 33.83 36.30%
70 203 18.66 66.13 no 104.311 38.18 36.60%
75 233.11 17.31 70.42 no 116.022 45.6 39.30%
80 280 15.66 76.54 no 128.300 51.76 40.30%
Con esta tabla se observa que a medida que aumenta la velocidad y se quiere utilizar el
radio mínimo AASHTO PGDHS en una curva horizontal en un túnel, además de
disminuir la deflexión para obtener DVCC, este valor cada vez es más lejano de cumplir
con Dp. Esto implica que para velocidades mayores, se requerirá una mayor parte de
recta tangente que permita cumplir con Dp, por lo que el ángulo de deflexión deberá ser
cada vez menor al obtenido como ΔDVCC.
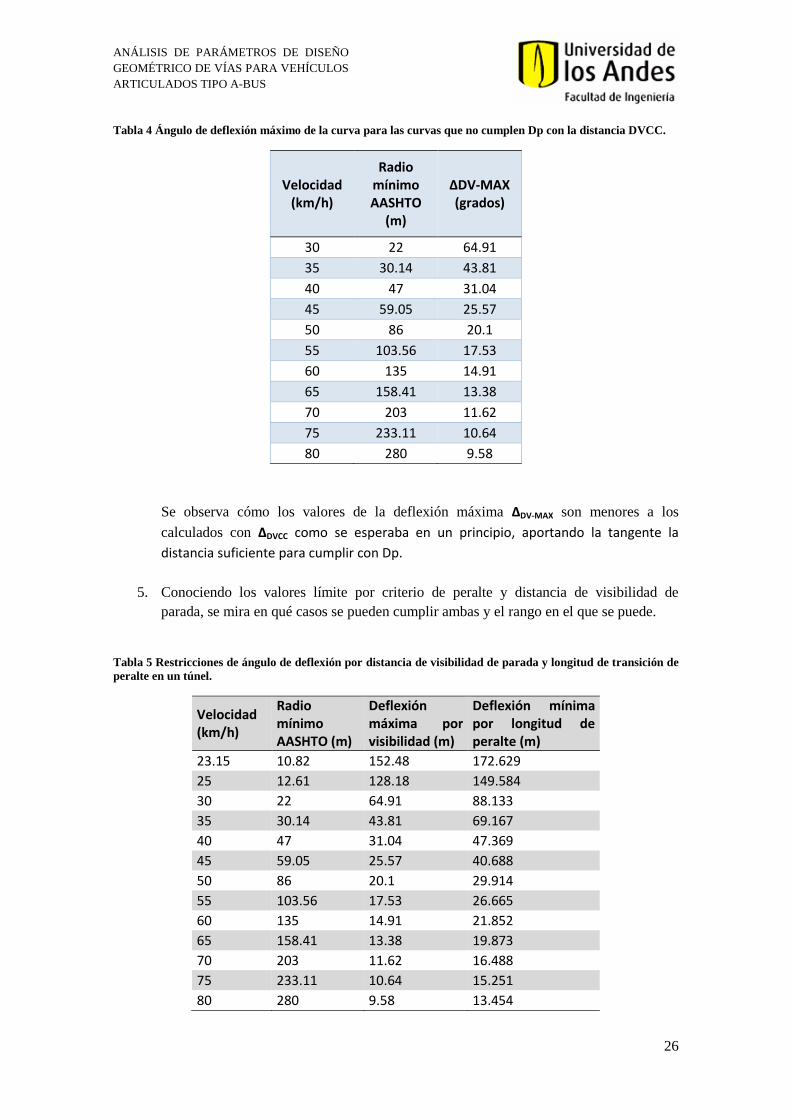
4. Para aquellas velocidades que no cumplieron Dp con DVCC, se calcula ΔDV-MAX como
se mencionó anteriormente en el procedimiento.
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
26
Tabla 4 Ángulo de deflexión máximo de la curva para las curvas que no cumplen Dp con la distancia DVCC.
Velocidad (km/h)
Radio mínimo AASHTO
(m)
ΔDV-MAX (grados)
30 22 64.91
35 30.14 43.81
40 47 31.04
45 59.05 25.57
50 86 20.1
55 103.56 17.53
60 135 14.91
65 158.41 13.38
70 203 11.62
75 233.11 10.64
80 280 9.58
Se observa cómo los valores de la deflexión máxima ΔDV-MAX son menores a los
calculados con ΔDVCC como se esperaba en un principio, aportando la tangente la
distancia suficiente para cumplir con Dp.
5. Conociendo los valores límite por criterio de peralte y distancia de visibilidad de
parada, se mira en qué casos se pueden cumplir ambas y el rango en el que se puede.
Tabla 5 Restricciones de ángulo de deflexión por distancia de visibilidad de parada y longitud de transición de
peralte en un túnel.
Velocidad (km/h)
Radio mínimo AASHTO (m)
Deflexión máxima por visibilidad (m)
Deflexión mínima por longitud de peralte (m)
23.15 10.82 152.48 172.629
25 12.61 128.18 149.584
30 22 64.91 88.133
35 30.14 43.81 69.167
40 47 31.04 47.369
45 59.05 25.57 40.688
50 86 20.1 29.914
55 103.56 17.53 26.665
60 135 14.91 21.852
65 158.41 13.38 19.873
70 203 11.62 16.488
75 233.11 10.64 15.251
80 280 9.58 13.454
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
27
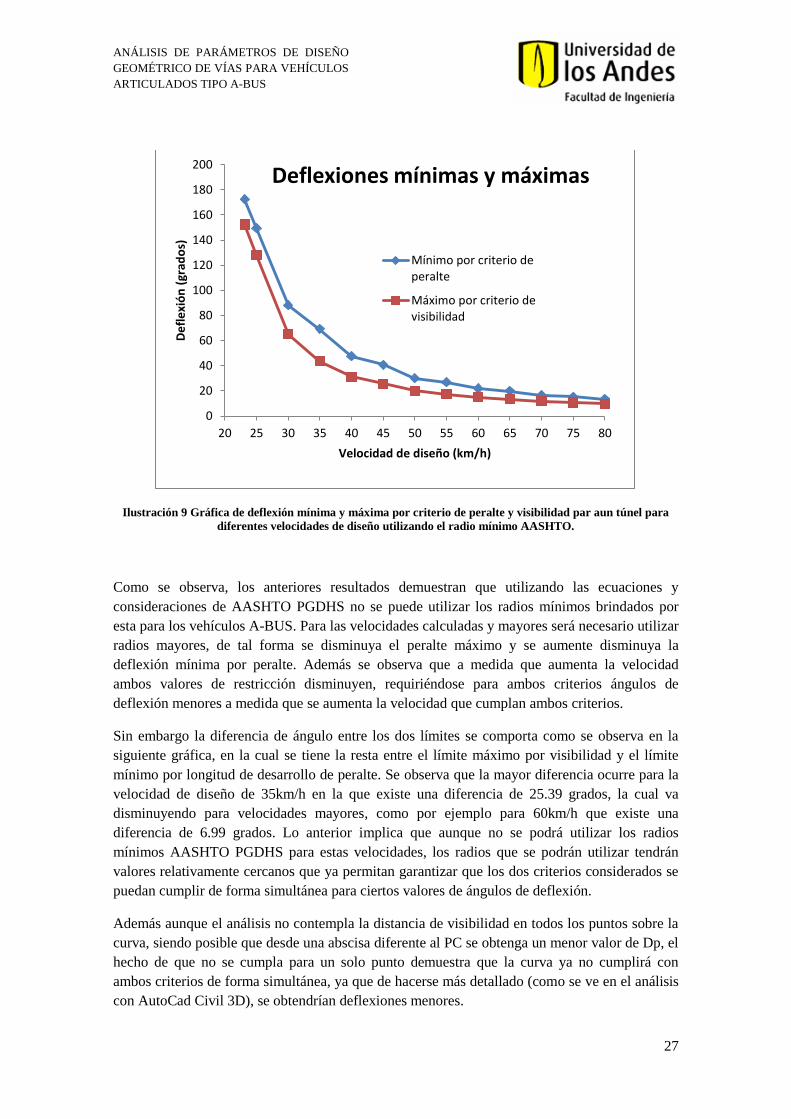
Ilustración 9 Gráfica de deflexión mínima y máxima por criterio de peralte y visibilidad par aun túnel para
diferentes velocidades de diseño utilizando el radio mínimo AASHTO.
Como se observa, los anteriores resultados demuestran que utilizando las ecuaciones y
consideraciones de AASHTO PGDHS no se puede utilizar los radios mínimos brindados por
esta para los vehículos A-BUS. Para las velocidades calculadas y mayores será necesario utilizar
radios mayores, de tal forma se disminuya el peralte máximo y se aumente disminuya la
deflexión mínima por peralte. Además se observa que a medida que aumenta la velocidad
ambos valores de restricción disminuyen, requiriéndose para ambos criterios ángulos de
deflexión menores a medida que se aumenta la velocidad que cumplan ambos criterios.
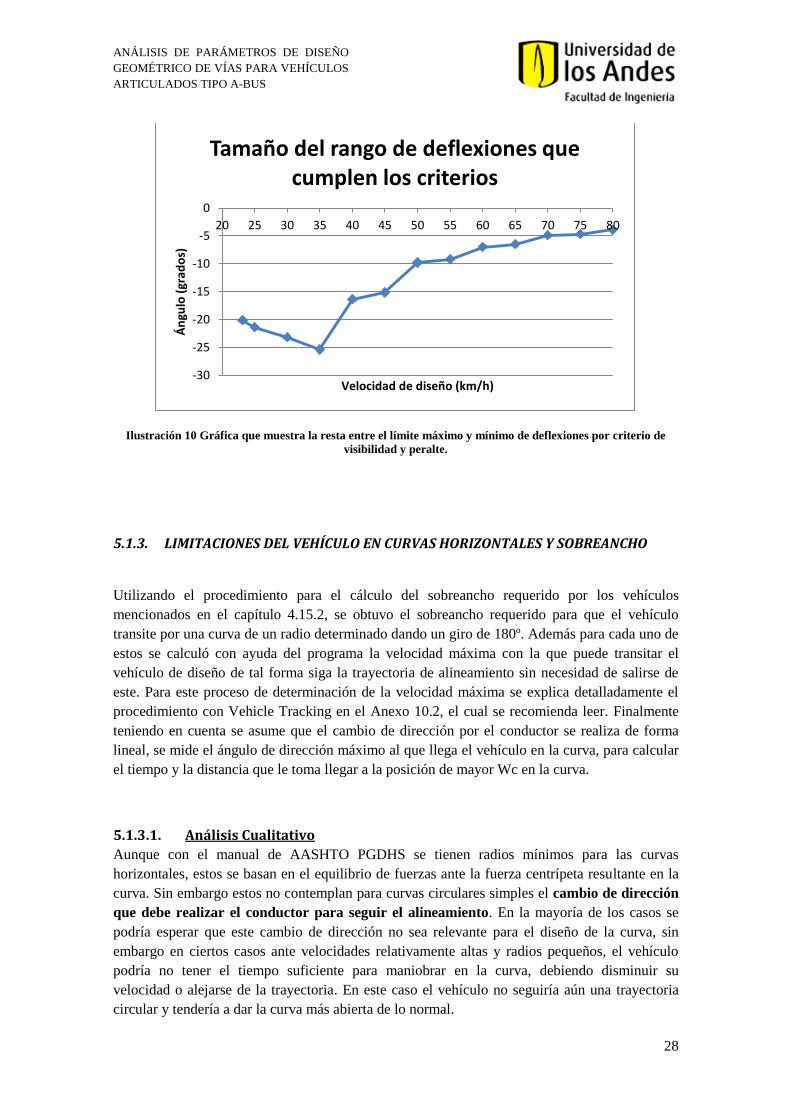
Sin embargo la diferencia de ángulo entre los dos límites se comporta como se observa en la
siguiente gráfica, en la cual se tiene la resta entre el límite máximo por visibilidad y el límite
mínimo por longitud de desarrollo de peralte. Se observa que la mayor diferencia ocurre para la
velocidad de diseño de 35km/h en la que existe una diferencia de 25.39 grados, la cual va
disminuyendo para velocidades mayores, como por ejemplo para 60km/h que existe una
diferencia de 6.99 grados. Lo anterior implica que aunque no se podrá utilizar los radios
mínimos AASHTO PGDHS para estas velocidades, los radios que se podrán utilizar tendrán
valores relativamente cercanos que ya permitan garantizar que los dos criterios considerados se
puedan cumplir de forma simultánea para ciertos valores de ángulos de deflexión.
Además aunque el análisis no contempla la distancia de visibilidad en todos los puntos sobre la
curva, siendo posible que desde una abscisa diferente al PC se obtenga un menor valor de Dp, el
hecho de que no se cumpla para un solo punto demuestra que la curva ya no cumplirá con
ambos criterios de forma simultánea, ya que de hacerse más detallado (como se ve en el análisis
con AutoCad Civil 3D), se obtendrían deflexiones menores.
0
20
40
60
80
100
120
140
160
180
200
20 25 30 35 40 45 50 55 60 65 70 75 80
De
fle
xió
n (
grad
os)
Velocidad de diseño (km/h)
Deflexiones mínimas y máximas
Mínimo por criterio deperalte
Máximo por criterio devisibilidad
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
28
Ilustración 10 Gráfica que muestra la resta entre el límite máximo y mínimo de deflexiones por criterio de
visibilidad y peralte.
5.1.3. LIMITACIONES DEL VEHÍCULO EN CURVAS HORIZONTALES Y SOBREANCHO
Utilizando el procedimiento para el cálculo del sobreancho requerido por los vehículos
mencionados en el capítulo 4.15.2, se obtuvo el sobreancho requerido para que el vehículo
transite por una curva de un radio determinado dando un giro de 180º. Además para cada uno de
estos se calculó con ayuda del programa la velocidad máxima con la que puede transitar el
vehículo de diseño de tal forma siga la trayectoria de alineamiento sin necesidad de salirse de
este. Para este proceso de determinación de la velocidad máxima se explica detalladamente el
procedimiento con Vehicle Tracking en el Anexo 10.2, el cual se recomienda leer. Finalmente
teniendo en cuenta se asume que el cambio de dirección por el conductor se realiza de forma
lineal, se mide el ángulo de dirección máximo al que llega el vehículo en la curva, para calcular
el tiempo y la distancia que le toma llegar a la posición de mayor Wc en la curva.
5.1.3.1. Análisis Cualitativo
Aunque con el manual de AASHTO PGDHS se tienen radios mínimos para las curvas
horizontales, estos se basan en el equilibrio de fuerzas ante la fuerza centrípeta resultante en la
curva. Sin embargo estos no contemplan para curvas circulares simples el cambio de dirección
que debe realizar el conductor para seguir el alineamiento. En la mayoría de los casos se
podría esperar que este cambio de dirección no sea relevante para el diseño de la curva, sin
embargo en ciertos casos ante velocidades relativamente altas y radios pequeños, el vehículo
podría no tener el tiempo suficiente para maniobrar en la curva, debiendo disminuir su
velocidad o alejarse de la trayectoria. En este caso el vehículo no seguiría aún una trayectoria
circular y tendería a dar la curva más abierta de lo normal.
-30
-25
-20
-15
-10
-5
0
20 25 30 35 40 45 50 55 60 65 70 75 80
Án
gulo
(gr
ado
s)
Velocidad de diseño (km/h)
Tamaño del rango de deflexiones que cumplen los criterios
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
29
Esto con ayuda de Vehicle Tracking, se pudo observar que es importante tenerlo en cuenta en
curvas horizontales sin curvas de transición. Con este programa se obtuvo la envolvente del
vehículo en la curva, obteniendo el ancho en curva de este (Uv), al cual al agregarse el espacio
de seguridad (clearance), permite calcular el sobreancho optimizado. Tomando varios
alineamientos se observó con la herramienta Seguir y AutoDrive que el vehículo para seguirlos
no puede sobrepasar una velocidad calculada por el programa (Anexo 10.2). Buscando mover el
vehículo a una velocidad mayor a la del límite por la misma curva, se observó que este debe
utilizar un radio de giro mayor y de esta forma llevar a que se lleve a cabo alguno de los
siguientes casos:
1. El vehículo al requerir un radio mayor al del alineamiento se desfasará y terminará de
dar la curva circular en una abscisa posterior a la del PT. Por esto no se cumplirá con
todo lo que se asume en los criterios de este tipo de curvas, requiriendo una forma
diferente y anchos mayores a los calculados en las abscisas de las tangentes cercanas al
PC y PT.
2. Para que el vehículo se encuentre alineado tangente a la recta en el PT y no se dé el caso
1, el vehículo deberá realizar al menos una maniobra adicional con la dirección en el
sentido contrario para poder retomar el alineamiento, por lo que estaría realizando
realmente curvas reversas, sin seguir lo que se asume sería la trayectoria del vehículo en
una curva circular simple.
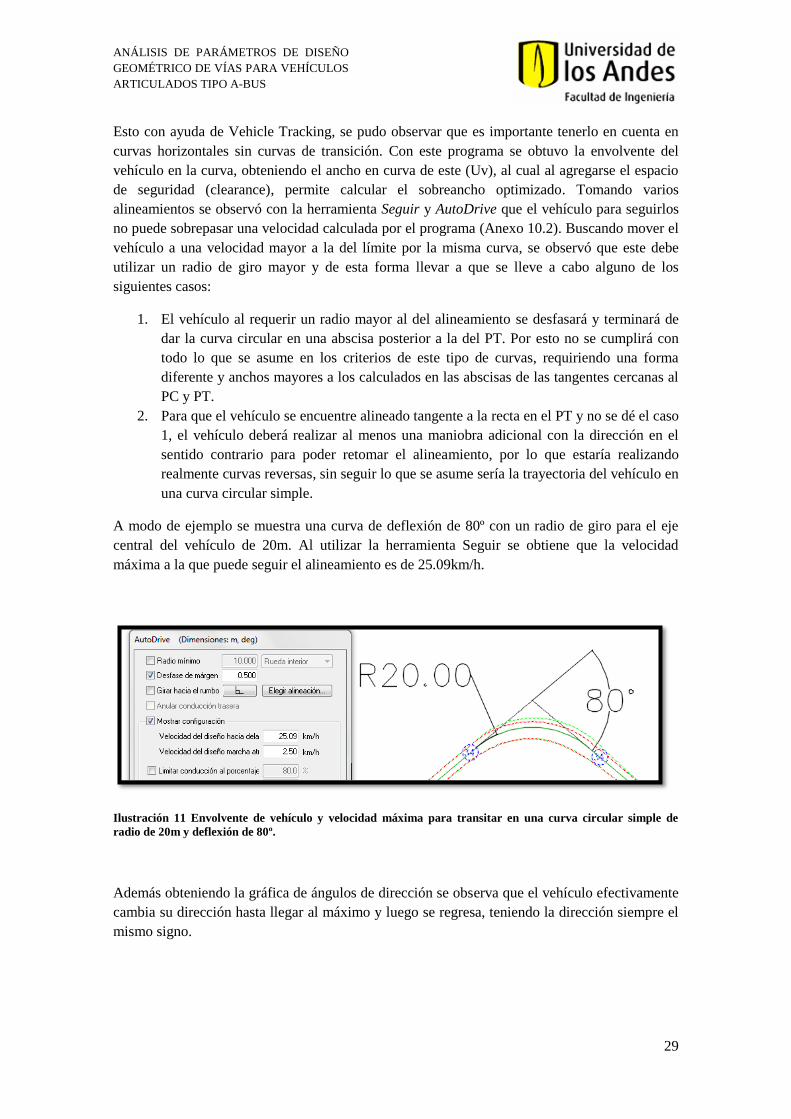
A modo de ejemplo se muestra una curva de deflexión de 80º con un radio de giro para el eje
central del vehículo de 20m. Al utilizar la herramienta Seguir se obtiene que la velocidad
máxima a la que puede seguir el alineamiento es de 25.09km/h.
Ilustración 11 Envolvente de vehículo y velocidad máxima para transitar en una curva circular simple de
radio de 20m y deflexión de 80º.
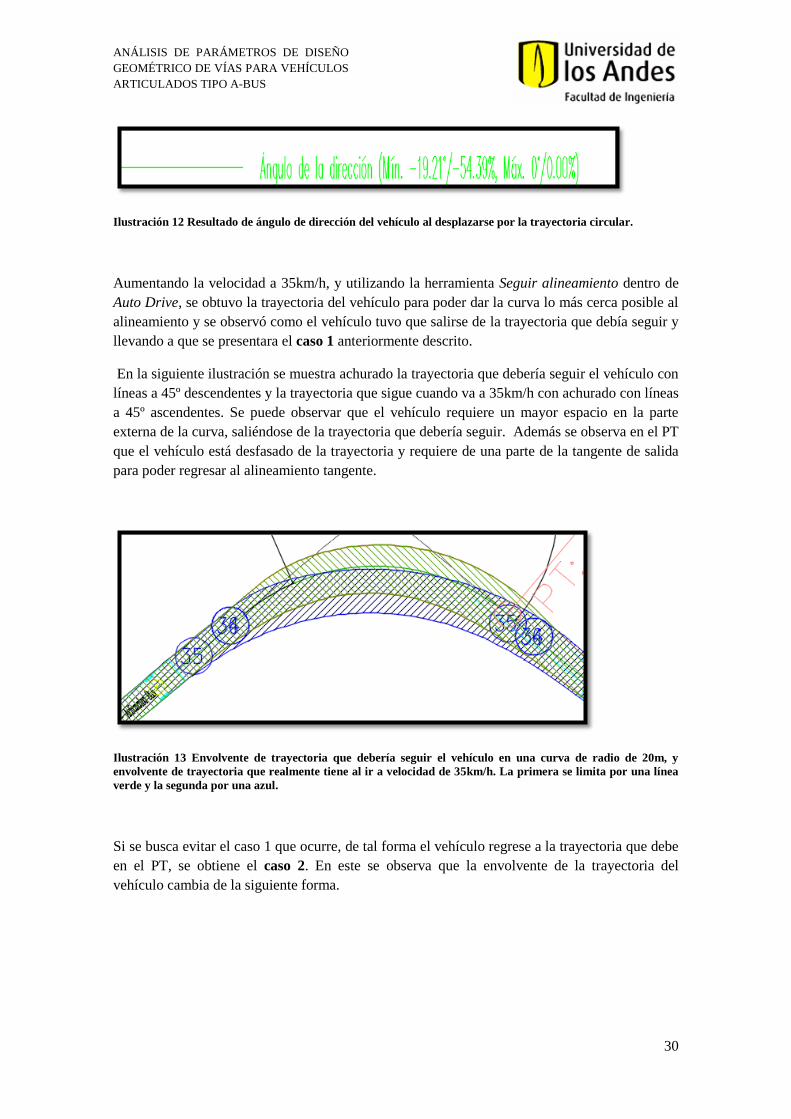
Además obteniendo la gráfica de ángulos de dirección se observa que el vehículo efectivamente
cambia su dirección hasta llegar al máximo y luego se regresa, teniendo la dirección siempre el
mismo signo.
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
30
Ilustración 12 Resultado de ángulo de dirección del vehículo al desplazarse por la trayectoria circular.
Aumentando la velocidad a 35km/h, y utilizando la herramienta Seguir alineamiento dentro de
Auto Drive, se obtuvo la trayectoria del vehículo para poder dar la curva lo más cerca posible al
alineamiento y se observó como el vehículo tuvo que salirse de la trayectoria que debía seguir y
llevando a que se presentara el caso 1 anteriormente descrito.
En la siguiente ilustración se muestra achurado la trayectoria que debería seguir el vehículo con
líneas a 45º descendentes y la trayectoria que sigue cuando va a 35km/h con achurado con líneas
a 45º ascendentes. Se puede observar que el vehículo requiere un mayor espacio en la parte
externa de la curva, saliéndose de la trayectoria que debería seguir. Además se observa en el PT
que el vehículo está desfasado de la trayectoria y requiere de una parte de la tangente de salida
para poder regresar al alineamiento tangente.
Ilustración 13 Envolvente de trayectoria que debería seguir el vehículo en una curva de radio de 20m, y
envolvente de trayectoria que realmente tiene al ir a velocidad de 35km/h. La primera se limita por una línea
verde y la segunda por una azul.
Si se busca evitar el caso 1 que ocurre, de tal forma el vehículo regrese a la trayectoria que debe
en el PT, se obtiene el caso 2. En este se observa que la envolvente de la trayectoria del
vehículo cambia de la siguiente forma.
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
31
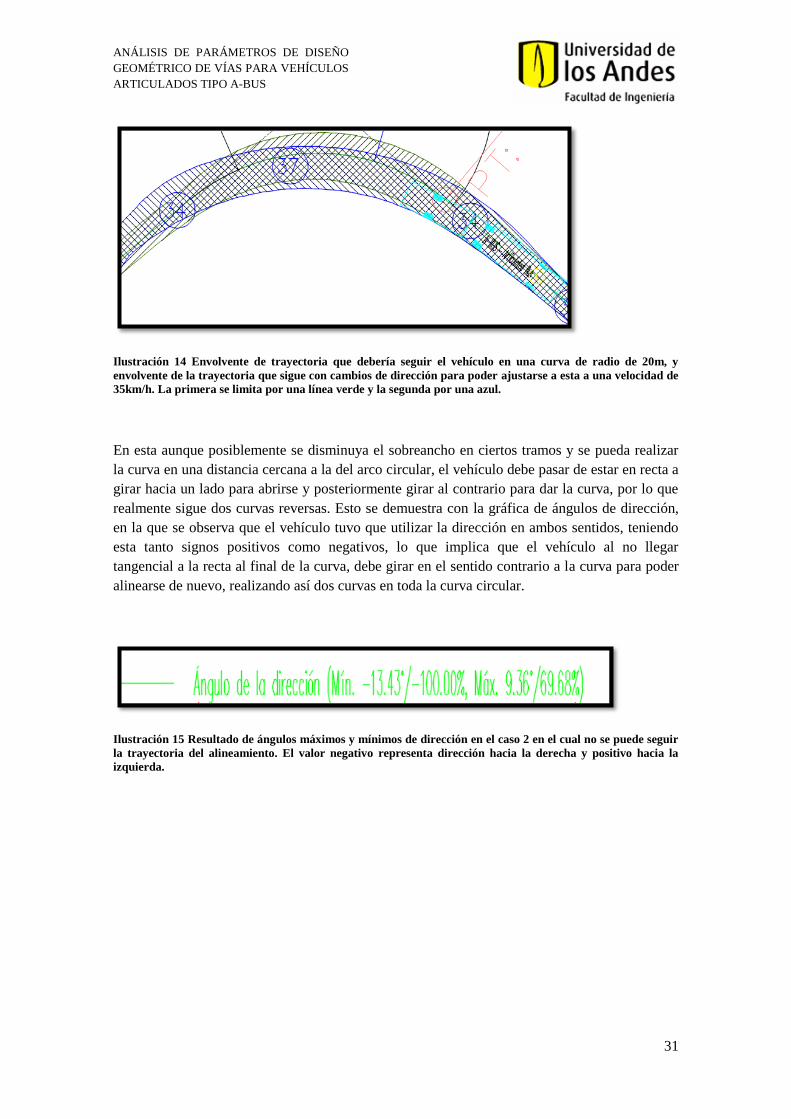
Ilustración 14 Envolvente de trayectoria que debería seguir el vehículo en una curva de radio de 20m, y
envolvente de la trayectoria que sigue con cambios de dirección para poder ajustarse a esta a una velocidad de
35km/h. La primera se limita por una línea verde y la segunda por una azul.
En esta aunque posiblemente se disminuya el sobreancho en ciertos tramos y se pueda realizar
la curva en una distancia cercana a la del arco circular, el vehículo debe pasar de estar en recta a
girar hacia un lado para abrirse y posteriormente girar al contrario para dar la curva, por lo que
realmente sigue dos curvas reversas. Esto se demuestra con la gráfica de ángulos de dirección,
en la que se observa que el vehículo tuvo que utilizar la dirección en ambos sentidos, teniendo
esta tanto signos positivos como negativos, lo que implica que el vehículo al no llegar
tangencial a la recta al final de la curva, debe girar en el sentido contrario a la curva para poder
alinearse de nuevo, realizando así dos curvas en toda la curva circular.
Ilustración 15 Resultado de ángulos máximos y mínimos de dirección en el caso 2 en el cual no se puede seguir
la trayectoria del alineamiento. El valor negativo representa dirección hacia la derecha y positivo hacia la
izquierda.
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
32
Ilustración 16 Gráfica de ángulo de dirección en el eje vertical y abscisa en el eje horizontal. En este se refleja
como en tangente está con dirección en 0º, luego gira a la izquierda hasta que llega a 9.36º y finalmente gira
con la curva circular con una dirección hacia la derecha de 13.43º.
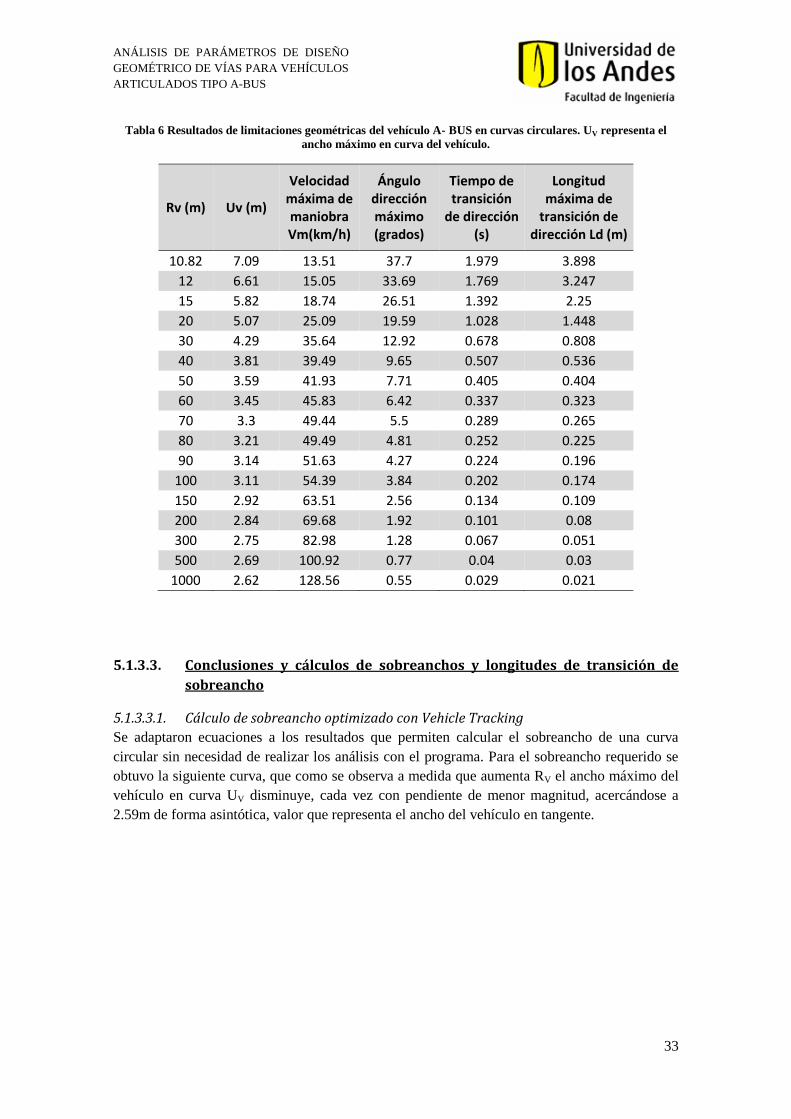
5.1.3.2. Cálculos y resultados
Obteniendo los valores de velocidades máximas por maniobra (Vm), ancho máximo del
vehículo en curva (UV) y ángulos de giro máximos para cada radio de giro del vehículo Rv, se
calculó el tiempo de maniobra para pasar de la dirección de un ángulo de 0º al máximo, y la
distancia requerida para realizar esta transición de dirección con la velocidad máxima.
El cálculo del tiempo de cambio de dirección de maniobra se calculó utilizando la tasa de
cambio de dirección TD de 19.05º/s explicada en el capítulo 4.14, con la cual si se divide el
ángulo máximo de dirección en la curva, se tiene el tiempo de transición de dirección (tΔd).
𝑡𝑑[𝑠] =(Á𝑛𝑔𝑢𝑙𝑜 𝑑𝑒 𝑔𝑖𝑟𝑜 𝑑𝑒𝑙 𝑣𝑒ℎí𝑐𝑢𝑙𝑜)[𝑔𝑟𝑎𝑑𝑜𝑠]
𝑇𝑑 (27)
Además se realiza el cálculo de la distancia requerida para hacer la transición de dirección para
la velocidad máxima obtenida del análisis, esta representa la distancia que le toma al conductor
pasar de tener la dirección con un ángulo de 0º hasta el máximo y es abreviada como Ld
(Longitud máxima de transición de dirección). Con esta se puede conocer si el sobreancho se
desarrolla en el tramo adecuado como se explica en las siguientes conclusiones.
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
33
Tabla 6 Resultados de limitaciones geométricas del vehículo A- BUS en curvas circulares. UV representa el
ancho máximo en curva del vehículo.
Rv (m) Uv (m)
Velocidad máxima de maniobra Vm(km/h)
Ángulo dirección máximo (grados)
Tiempo de transición
de dirección (s)
Longitud máxima de
transición de dirección Ld (m)
10.82 7.09 13.51 37.7 1.979 3.898
12 6.61 15.05 33.69 1.769 3.247
15 5.82 18.74 26.51 1.392 2.25
20 5.07 25.09 19.59 1.028 1.448
30 4.29 35.64 12.92 0.678 0.808
40 3.81 39.49 9.65 0.507 0.536
50 3.59 41.93 7.71 0.405 0.404
60 3.45 45.83 6.42 0.337 0.323
70 3.3 49.44 5.5 0.289 0.265
80 3.21 49.49 4.81 0.252 0.225
90 3.14 51.63 4.27 0.224 0.196
100 3.11 54.39 3.84 0.202 0.174
150 2.92 63.51 2.56 0.134 0.109
200 2.84 69.68 1.92 0.101 0.08
300 2.75 82.98 1.28 0.067 0.051
500 2.69 100.92 0.77 0.04 0.03
1000 2.62 128.56 0.55 0.029 0.021
5.1.3.3. Conclusiones y cálculos de sobreanchos y longitudes de transición de
sobreancho
5.1.3.3.1. Cálculo de sobreancho optimizado con Vehicle Tracking
Se adaptaron ecuaciones a los resultados que permiten calcular el sobreancho de una curva
circular sin necesidad de realizar los análisis con el programa. Para el sobreancho requerido se
obtuvo la siguiente curva, que como se observa a medida que aumenta RV el ancho máximo del
vehículo en curva UV disminuye, cada vez con pendiente de menor magnitud, acercándose a
2.59m de forma asintótica, valor que representa el ancho del vehículo en tangente.
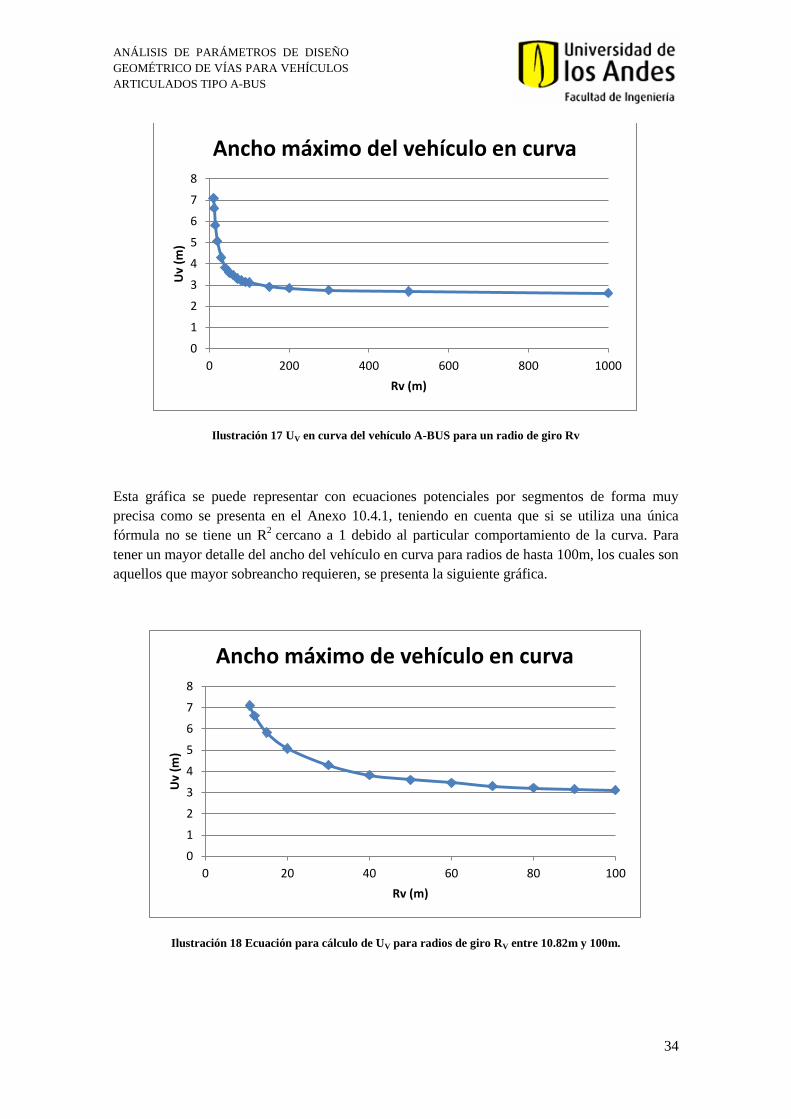
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
34
Ilustración 17 UV en curva del vehículo A-BUS para un radio de giro Rv
Esta gráfica se puede representar con ecuaciones potenciales por segmentos de forma muy
precisa como se presenta en el Anexo 10.4.1, teniendo en cuenta que si se utiliza una única
fórmula no se tiene un R2
cercano a 1 debido al particular comportamiento de la curva. Para
tener un mayor detalle del ancho del vehículo en curva para radios de hasta 100m, los cuales son
aquellos que mayor sobreancho requieren, se presenta la siguiente gráfica.
Ilustración 18 Ecuación para cálculo de UV para radios de giro RV entre 10.82m y 100m.
0
1
2
3
4
5
6
7
8
0 200 400 600 800 1000
Uv
(m)
Rv (m)
Ancho máximo del vehículo en curva
0
1
2
3
4
5
6
7
8
0 20 40 60 80 100
Uv
(m)
Rv (m)
Ancho máximo de vehículo en curva
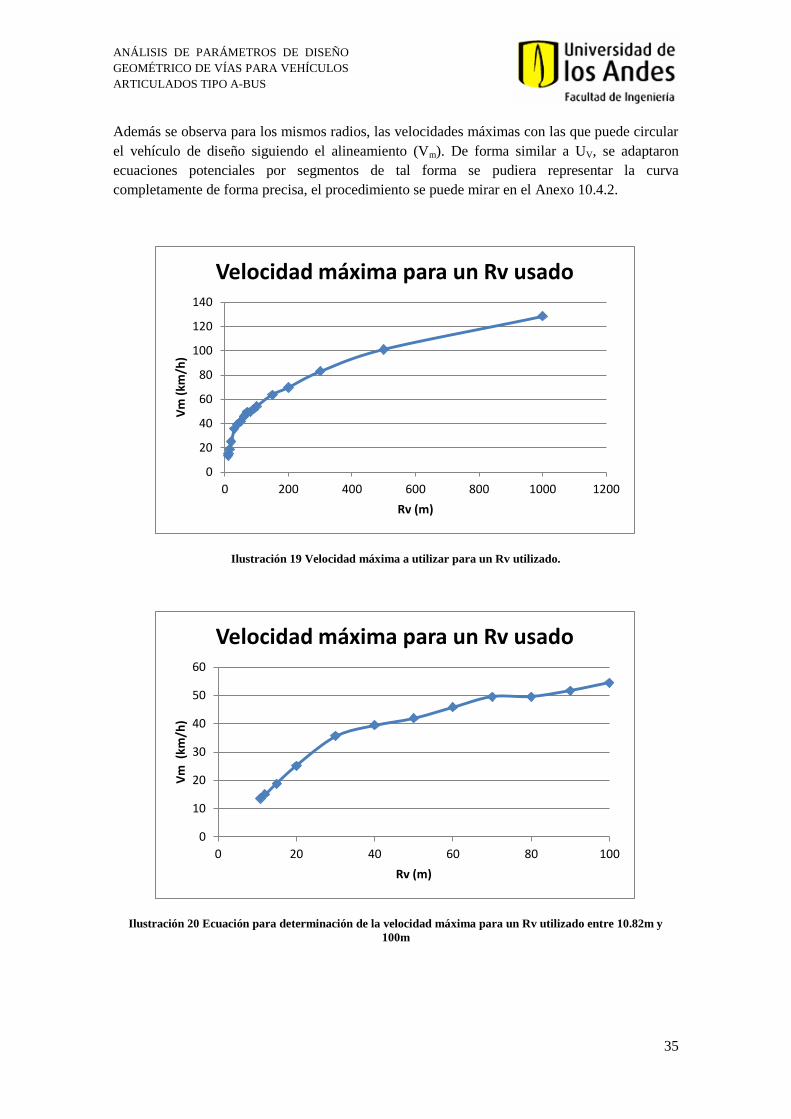
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
35
Además se observa para los mismos radios, las velocidades máximas con las que puede circular
el vehículo de diseño siguiendo el alineamiento (Vm). De forma similar a UV, se adaptaron
ecuaciones potenciales por segmentos de tal forma se pudiera representar la curva
completamente de forma precisa, el procedimiento se puede mirar en el Anexo 10.4.2.
Ilustración 19 Velocidad máxima a utilizar para un Rv utilizado.
Ilustración 20 Ecuación para determinación de la velocidad máxima para un Rv utilizado entre 10.82m y
100m
0
20
40
60
80
100
120
140
0 200 400 600 800 1000 1200
Vm
(km
/h)
Rv (m)
Velocidad máxima para un Rv usado
0
10
20
30
40
50
60
0 20 40 60 80 100
Vm
(km
/h)
Rv (m)
Velocidad máxima para un Rv usado
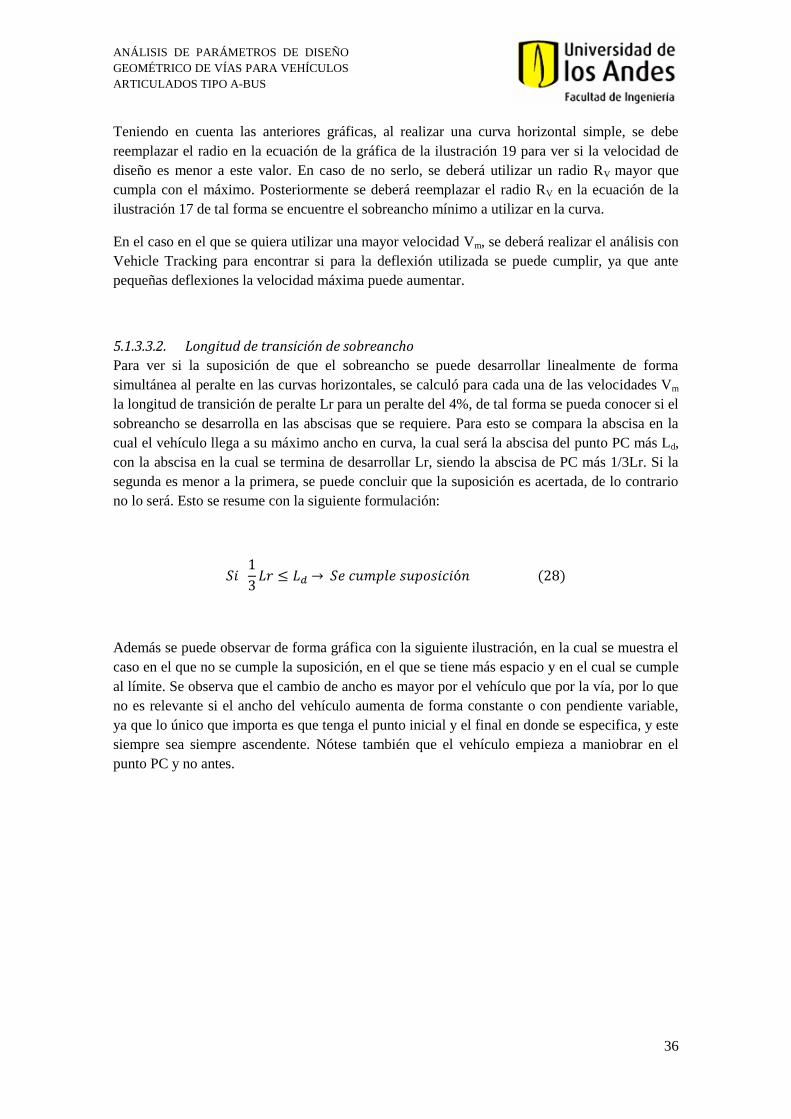
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
36
Teniendo en cuenta las anteriores gráficas, al realizar una curva horizontal simple, se debe
reemplazar el radio en la ecuación de la gráfica de la ilustración 19 para ver si la velocidad de
diseño es menor a este valor. En caso de no serlo, se deberá utilizar un radio RV mayor que
cumpla con el máximo. Posteriormente se deberá reemplazar el radio RV en la ecuación de la
ilustración 17 de tal forma se encuentre el sobreancho mínimo a utilizar en la curva.
En el caso en el que se quiera utilizar una mayor velocidad Vm, se deberá realizar el análisis con
Vehicle Tracking para encontrar si para la deflexión utilizada se puede cumplir, ya que ante
pequeñas deflexiones la velocidad máxima puede aumentar.
5.1.3.3.2. Longitud de transición de sobreancho
Para ver si la suposición de que el sobreancho se puede desarrollar linealmente de forma
simultánea al peralte en las curvas horizontales, se calculó para cada una de las velocidades Vm
la longitud de transición de peralte Lr para un peralte del 4%, de tal forma se pueda conocer si el
sobreancho se desarrolla en las abscisas que se requiere. Para esto se compara la abscisa en la
cual el vehículo llega a su máximo ancho en curva, la cual será la abscisa del punto PC más Ld,
con la abscisa en la cual se termina de desarrollar Lr, siendo la abscisa de PC más 1/3Lr. Si la
segunda es menor a la primera, se puede concluir que la suposición es acertada, de lo contrario
no lo será. Esto se resume con la siguiente formulación:
𝑆𝑖 1
3𝐿𝑟 ≤ 𝐿𝑑 → 𝑆𝑒 𝑐𝑢𝑚𝑝𝑙𝑒 𝑠𝑢𝑝𝑜𝑠𝑖𝑐𝑖ó𝑛 (28)
Además se puede observar de forma gráfica con la siguiente ilustración, en la cual se muestra el
caso en el que no se cumple la suposición, en el que se tiene más espacio y en el cual se cumple
al límite. Se observa que el cambio de ancho es mayor por el vehículo que por la vía, por lo que
no es relevante si el ancho del vehículo aumenta de forma constante o con pendiente variable,
ya que lo único que importa es que tenga el punto inicial y el final en donde se especifica, y este
siempre sea siempre ascendente. Nótese también que el vehículo empieza a maniobrar en el
punto PC y no antes.
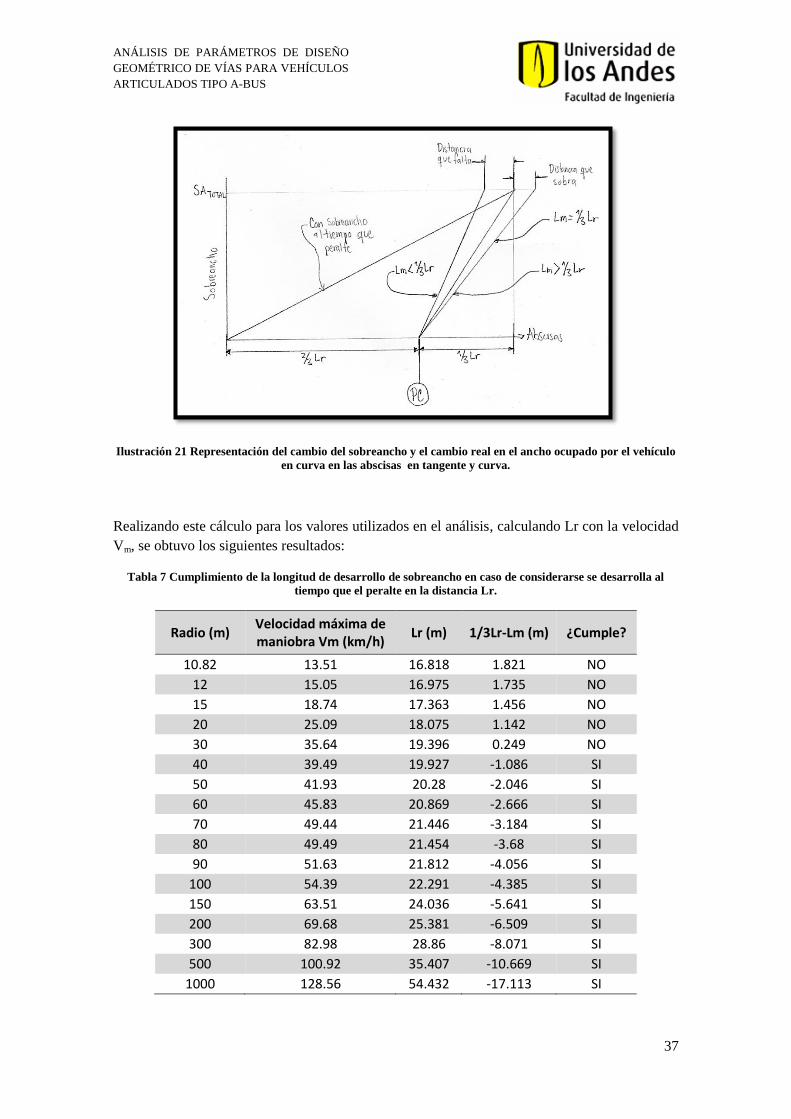
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
37
Ilustración 21 Representación del cambio del sobreancho y el cambio real en el ancho ocupado por el vehículo
en curva en las abscisas en tangente y curva.
Realizando este cálculo para los valores utilizados en el análisis, calculando Lr con la velocidad
Vm, se obtuvo los siguientes resultados:
Tabla 7 Cumplimiento de la longitud de desarrollo de sobreancho en caso de considerarse se desarrolla al
tiempo que el peralte en la distancia Lr.
Radio (m) Velocidad máxima de maniobra Vm (km/h)
Lr (m) 1/3Lr-Lm (m) ¿Cumple?
10.82 13.51 16.818 1.821 NO
12 15.05 16.975 1.735 NO
15 18.74 17.363 1.456 NO
20 25.09 18.075 1.142 NO
30 35.64 19.396 0.249 NO
40 39.49 19.927 -1.086 SI
50 41.93 20.28 -2.046 SI
60 45.83 20.869 -2.666 SI
70 49.44 21.446 -3.184 SI
80 49.49 21.454 -3.68 SI
90 51.63 21.812 -4.056 SI
100 54.39 22.291 -4.385 SI
150 63.51 24.036 -5.641 SI
200 69.68 25.381 -6.509 SI
300 82.98 28.86 -8.071 SI
500 100.92 35.407 -10.669 SI
1000 128.56 54.432 -17.113 SI
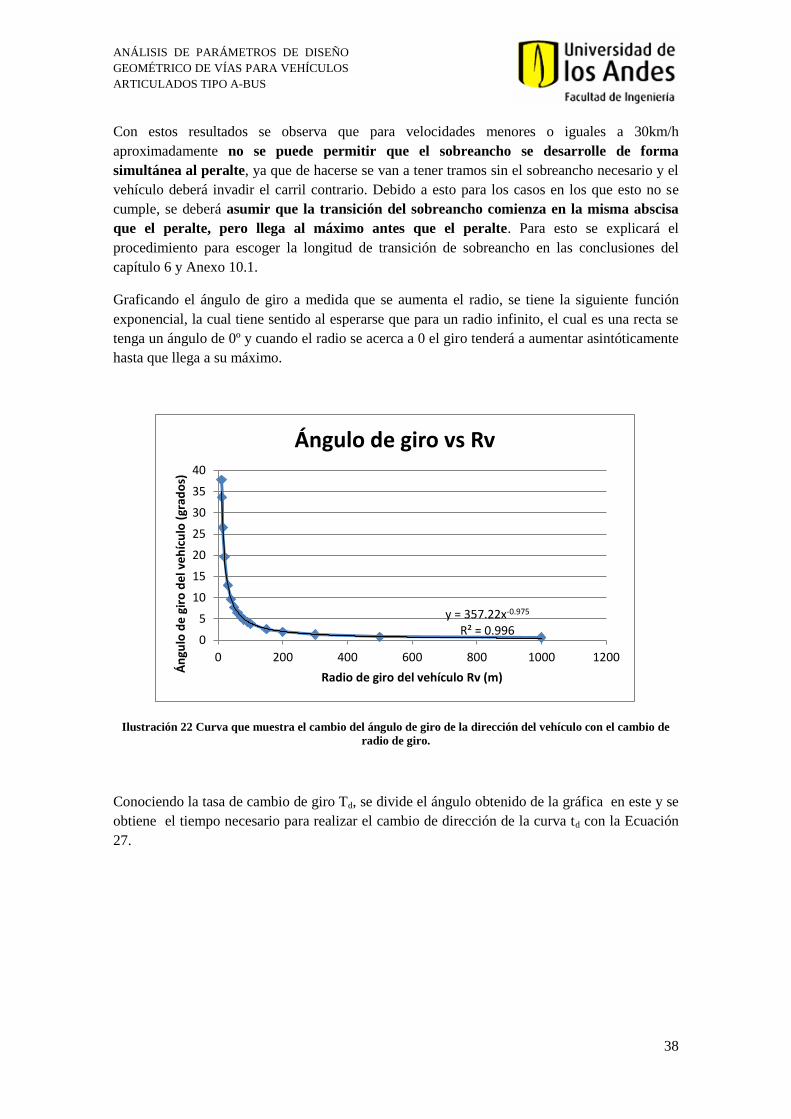
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
38
Con estos resultados se observa que para velocidades menores o iguales a 30km/h
aproximadamente no se puede permitir que el sobreancho se desarrolle de forma
simultánea al peralte, ya que de hacerse se van a tener tramos sin el sobreancho necesario y el
vehículo deberá invadir el carril contrario. Debido a esto para los casos en los que esto no se
cumple, se deberá asumir que la transición del sobreancho comienza en la misma abscisa
que el peralte, pero llega al máximo antes que el peralte. Para esto se explicará el
procedimiento para escoger la longitud de transición de sobreancho en las conclusiones del
capítulo 6 y Anexo 10.1.
Graficando el ángulo de giro a medida que se aumenta el radio, se tiene la siguiente función
exponencial, la cual tiene sentido al esperarse que para un radio infinito, el cual es una recta se
tenga un ángulo de 0º y cuando el radio se acerca a 0 el giro tenderá a aumentar asintóticamente
hasta que llega a su máximo.
Ilustración 22 Curva que muestra el cambio del ángulo de giro de la dirección del vehículo con el cambio de
radio de giro.
Conociendo la tasa de cambio de giro Td, se divide el ángulo obtenido de la gráfica en este y se
obtiene el tiempo necesario para realizar el cambio de dirección de la curva td con la Ecuación
27.
y = 357.22x-0.975 R² = 0.996
0
5
10
15
20
25
30
35
40
0 200 400 600 800 1000 1200
Án
gulo
de
gir
o d
el v
eh
ícu
lo (
grad
os)
Radio de giro del vehículo Rv (m)
Ángulo de giro vs Rv
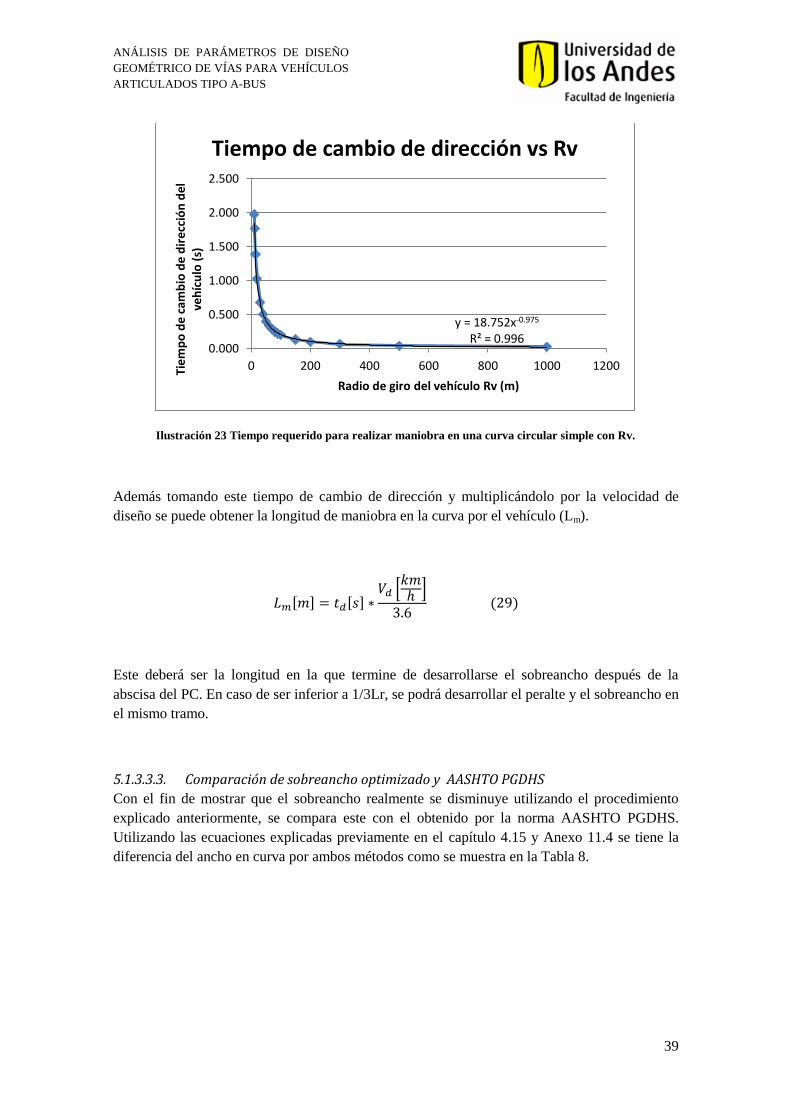
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
39
Ilustración 23 Tiempo requerido para realizar maniobra en una curva circular simple con Rv.
Además tomando este tiempo de cambio de dirección y multiplicándolo por la velocidad de
diseño se puede obtener la longitud de maniobra en la curva por el vehículo (Lm).
𝐿𝑚[𝑚] = 𝑡𝑑[𝑠] ∗𝑉𝑑 [
𝑘𝑚ℎ
]
3.6 (29)
Este deberá ser la longitud en la que termine de desarrollarse el sobreancho después de la
abscisa del PC. En caso de ser inferior a 1/3Lr, se podrá desarrollar el peralte y el sobreancho en
el mismo tramo.
5.1.3.3.3. Comparación de sobreancho optimizado y AASHTO PGDHS
Con el fin de mostrar que el sobreancho realmente se disminuye utilizando el procedimiento
explicado anteriormente, se compara este con el obtenido por la norma AASHTO PGDHS.
Utilizando las ecuaciones explicadas previamente en el capítulo 4.15 y Anexo 11.4 se tiene la
diferencia del ancho en curva por ambos métodos como se muestra en la Tabla 8.
y = 18.752x-0.975 R² = 0.996
0.000
0.500
1.000
1.500
2.000
2.500
0 200 400 600 800 1000 1200Tie
mp
o d
e c
amb
io d
e d
ire
cció
n d
el
veh
ícu
lo (
s)
Radio de giro del vehículo Rv (m)
Tiempo de cambio de dirección vs Rv
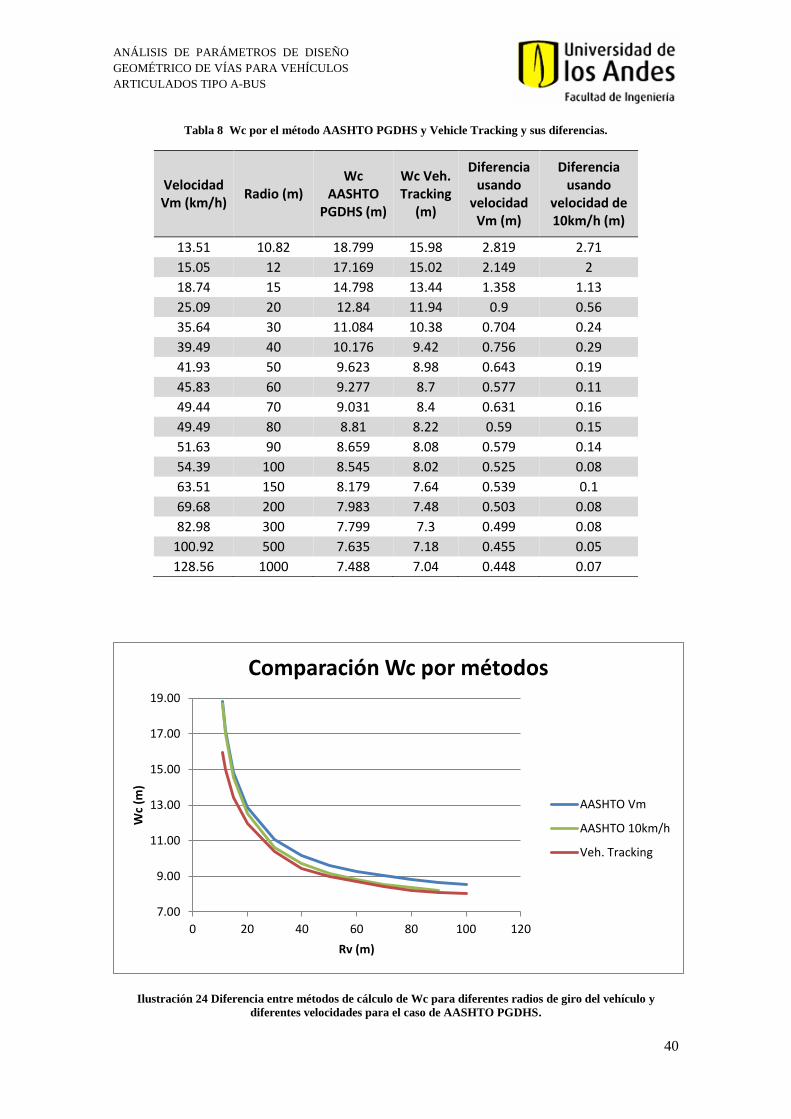
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
40
Tabla 8 Wc por el método AASHTO PGDHS y Vehicle Tracking y sus diferencias.
Velocidad Vm (km/h)
Radio (m) Wc
AASHTO PGDHS (m)
Wc Veh. Tracking
(m)
Diferencia usando
velocidad Vm (m)
Diferencia usando
velocidad de 10km/h (m)
13.51 10.82 18.799 15.98 2.819 2.71
15.05 12 17.169 15.02 2.149 2
18.74 15 14.798 13.44 1.358 1.13
25.09 20 12.84 11.94 0.9 0.56
35.64 30 11.084 10.38 0.704 0.24
39.49 40 10.176 9.42 0.756 0.29
41.93 50 9.623 8.98 0.643 0.19
45.83 60 9.277 8.7 0.577 0.11
49.44 70 9.031 8.4 0.631 0.16
49.49 80 8.81 8.22 0.59 0.15
51.63 90 8.659 8.08 0.579 0.14
54.39 100 8.545 8.02 0.525 0.08
63.51 150 8.179 7.64 0.539 0.1
69.68 200 7.983 7.48 0.503 0.08
82.98 300 7.799 7.3 0.499 0.08
100.92 500 7.635 7.18 0.455 0.05
128.56 1000 7.488 7.04 0.448 0.07
Ilustración 24 Diferencia entre métodos de cálculo de Wc para diferentes radios de giro del vehículo y
diferentes velocidades para el caso de AASHTO PGDHS.
7.00
9.00
11.00
13.00
15.00
17.00
19.00
0 20 40 60 80 100 120
Wc
(m)
Rv (m)
Comparación Wc por métodos
AASHTO Vm
AASHTO 10km/h
Veh. Tracking
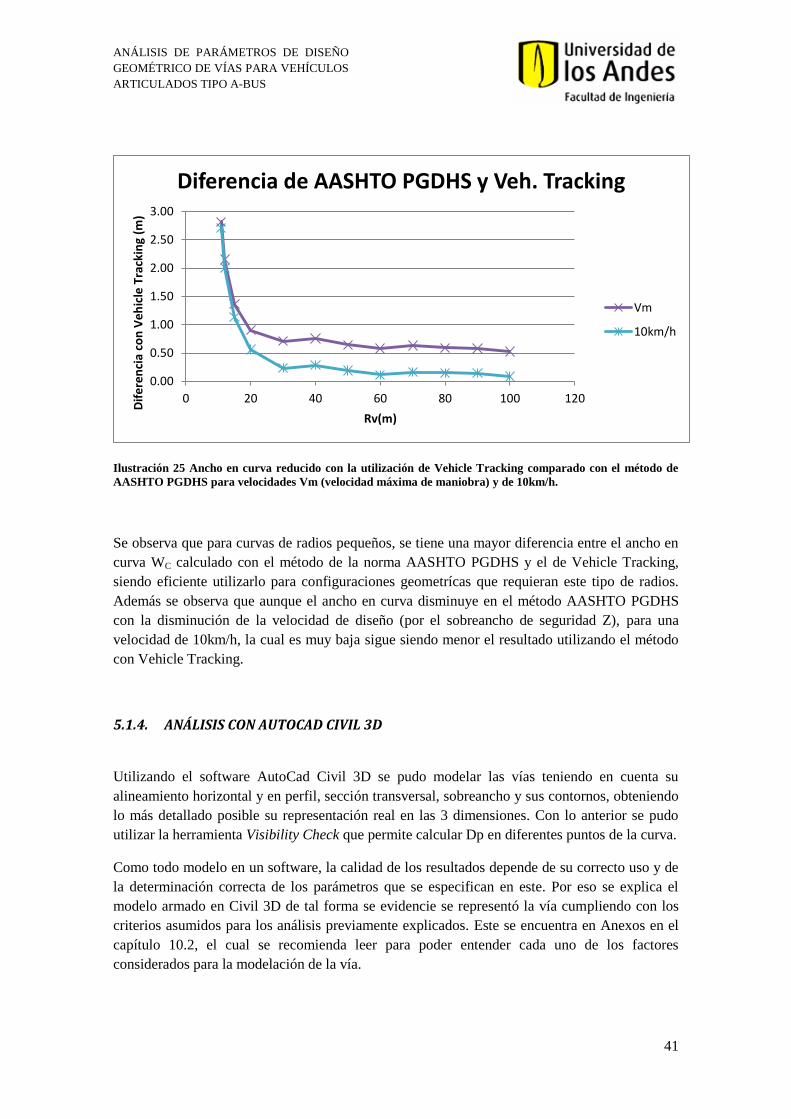
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
41
Ilustración 25 Ancho en curva reducido con la utilización de Vehicle Tracking comparado con el método de
AASHTO PGDHS para velocidades Vm (velocidad máxima de maniobra) y de 10km/h.
Se observa que para curvas de radios pequeños, se tiene una mayor diferencia entre el ancho en
curva WC calculado con el método de la norma AASHTO PGDHS y el de Vehicle Tracking,
siendo eficiente utilizarlo para configuraciones geometrícas que requieran este tipo de radios.
Además se observa que aunque el ancho en curva disminuye en el método AASHTO PGDHS
con la disminución de la velocidad de diseño (por el sobreancho de seguridad Z), para una
velocidad de 10km/h, la cual es muy baja sigue siendo menor el resultado utilizando el método
con Vehicle Tracking.
5.1.4. ANÁLISIS CON AUTOCAD CIVIL 3D
Utilizando el software AutoCad Civil 3D se pudo modelar las vías teniendo en cuenta su
alineamiento horizontal y en perfil, sección transversal, sobreancho y sus contornos, obteniendo
lo más detallado posible su representación real en las 3 dimensiones. Con lo anterior se pudo
utilizar la herramienta Visibility Check que permite calcular Dp en diferentes puntos de la curva.
Como todo modelo en un software, la calidad de los resultados depende de su correcto uso y de
la determinación correcta de los parámetros que se especifican en este. Por eso se explica el
modelo armado en Civil 3D de tal forma se evidencie se representó la vía cumpliendo con los
criterios asumidos para los análisis previamente explicados. Este se encuentra en Anexos en el
capítulo 10.2, el cual se recomienda leer para poder entender cada uno de los factores
considerados para la modelación de la vía.
0.00
0.50
1.00
1.50
2.00
2.50
3.00
0 20 40 60 80 100 120
Dif
ere
nci
a co
n V
eh
icle
Tra
ckin
g (m
)
Rv(m)
Diferencia de AASHTO PGDHS y Veh. Tracking
Vm
10km/h
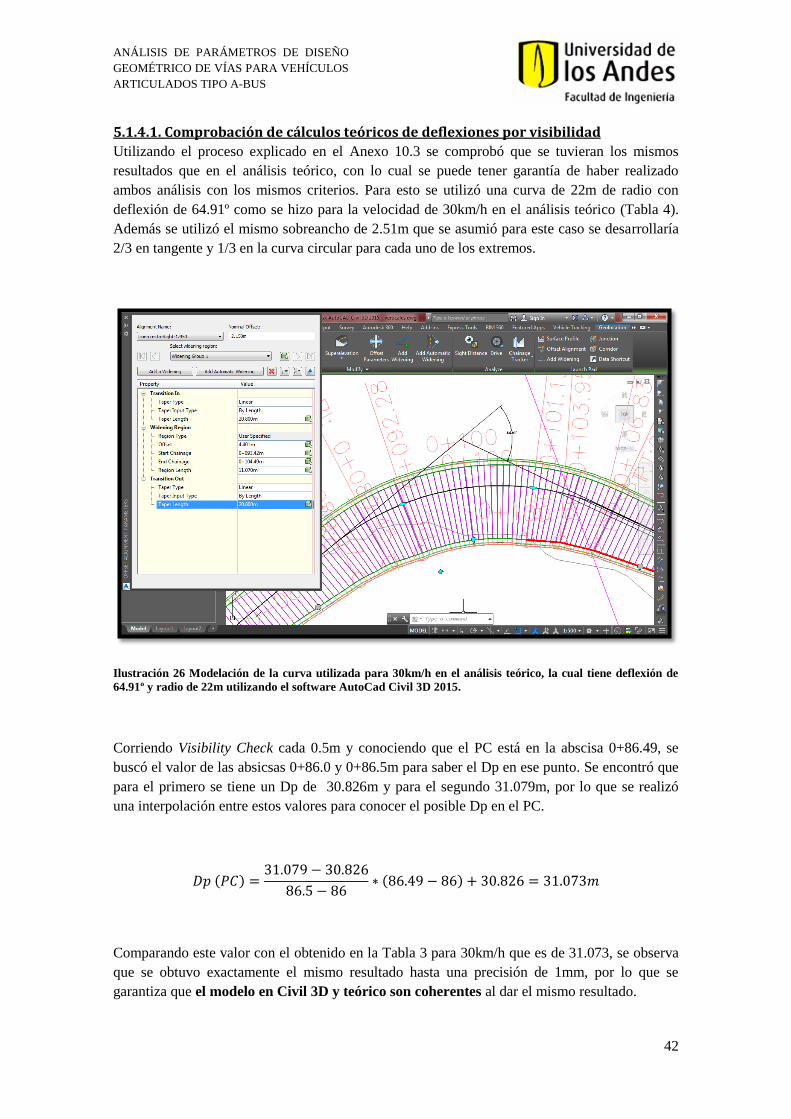
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
42
5.1.4.1. Comprobación de cálculos teóricos de deflexiones por visibilidad
Utilizando el proceso explicado en el Anexo 10.3 se comprobó que se tuvieran los mismos
resultados que en el análisis teórico, con lo cual se puede tener garantía de haber realizado
ambos análisis con los mismos criterios. Para esto se utilizó una curva de 22m de radio con
deflexión de 64.91º como se hizo para la velocidad de 30km/h en el análisis teórico (Tabla 4).
Además se utilizó el mismo sobreancho de 2.51m que se asumió para este caso se desarrollaría
2/3 en tangente y 1/3 en la curva circular para cada uno de los extremos.
Ilustración 26 Modelación de la curva utilizada para 30km/h en el análisis teórico, la cual tiene deflexión de
64.91º y radio de 22m utilizando el software AutoCad Civil 3D 2015.
Corriendo Visibility Check cada 0.5m y conociendo que el PC está en la abscisa 0+86.49, se
buscó el valor de las absicsas 0+86.0 y 0+86.5m para saber el Dp en ese punto. Se encontró que
para el primero se tiene un Dp de 30.826m y para el segundo 31.079m, por lo que se realizó
una interpolación entre estos valores para conocer el posible Dp en el PC.
𝐷𝑝 (𝑃𝐶) =31.079 − 30.826
86.5 − 86∗ (86.49 − 86) + 30.826 = 31.073𝑚
Comparando este valor con el obtenido en la Tabla 3 para 30km/h que es de 31.073, se observa
que se obtuvo exactamente el mismo resultado hasta una precisión de 1mm, por lo que se
garantiza que el modelo en Civil 3D y teórico son coherentes al dar el mismo resultado.
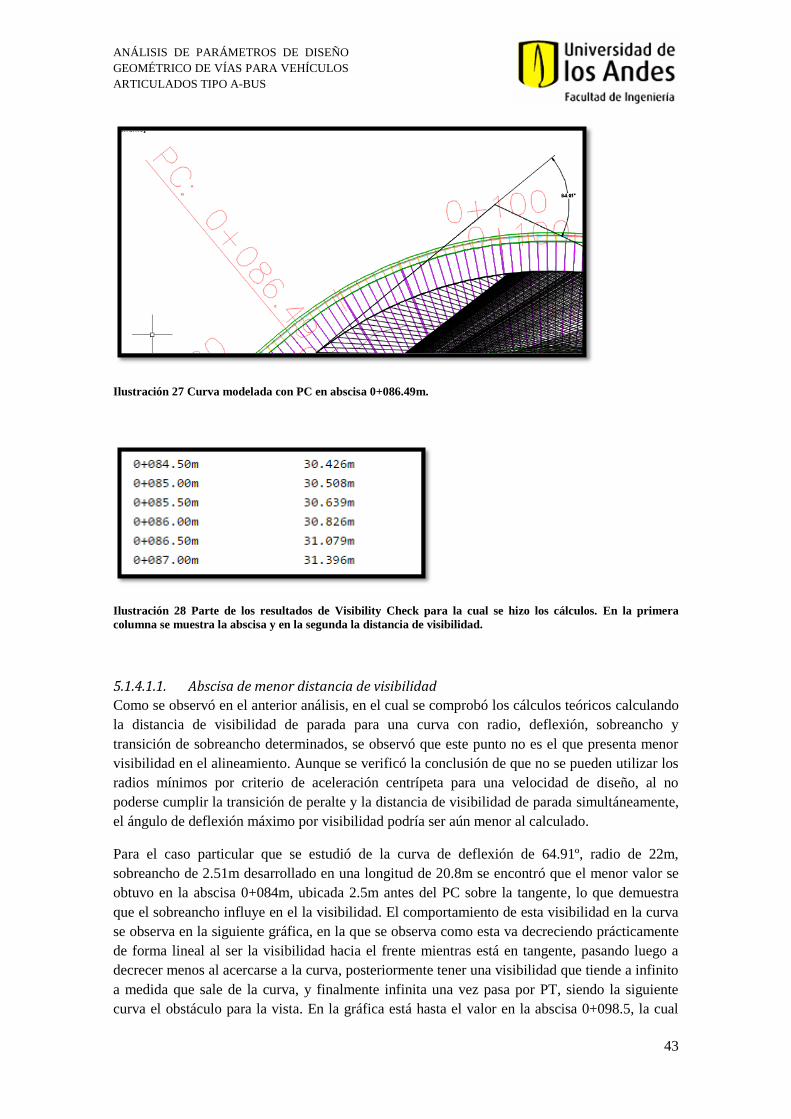
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
43
Ilustración 27 Curva modelada con PC en abscisa 0+086.49m.
Ilustración 28 Parte de los resultados de Visibility Check para la cual se hizo los cálculos. En la primera
columna se muestra la abscisa y en la segunda la distancia de visibilidad.
5.1.4.1.1. Abscisa de menor distancia de visibilidad
Como se observó en el anterior análisis, en el cual se comprobó los cálculos teóricos calculando
la distancia de visibilidad de parada para una curva con radio, deflexión, sobreancho y
transición de sobreancho determinados, se observó que este punto no es el que presenta menor
visibilidad en el alineamiento. Aunque se verificó la conclusión de que no se pueden utilizar los
radios mínimos por criterio de aceleración centrípeta para una velocidad de diseño, al no
poderse cumplir la transición de peralte y la distancia de visibilidad de parada simultáneamente,
el ángulo de deflexión máximo por visibilidad podría ser aún menor al calculado.
Para el caso particular que se estudió de la curva de deflexión de 64.91º, radio de 22m,
sobreancho de 2.51m desarrollado en una longitud de 20.8m se encontró que el menor valor se
obtuvo en la abscisa 0+084m, ubicada 2.5m antes del PC sobre la tangente, lo que demuestra
que el sobreancho influye en el la visibilidad. El comportamiento de esta visibilidad en la curva
se observa en la siguiente gráfica, en la que se observa como esta va decreciendo prácticamente
de forma lineal al ser la visibilidad hacia el frente mientras está en tangente, pasando luego a
decrecer menos al acercarse a la curva, posteriormente tener una visibilidad que tiende a infinito
a medida que sale de la curva, y finalmente infinita una vez pasa por PT, siendo la siguiente
curva el obstáculo para la vista. En la gráfica está hasta el valor en la abscisa 0+098.5, la cual
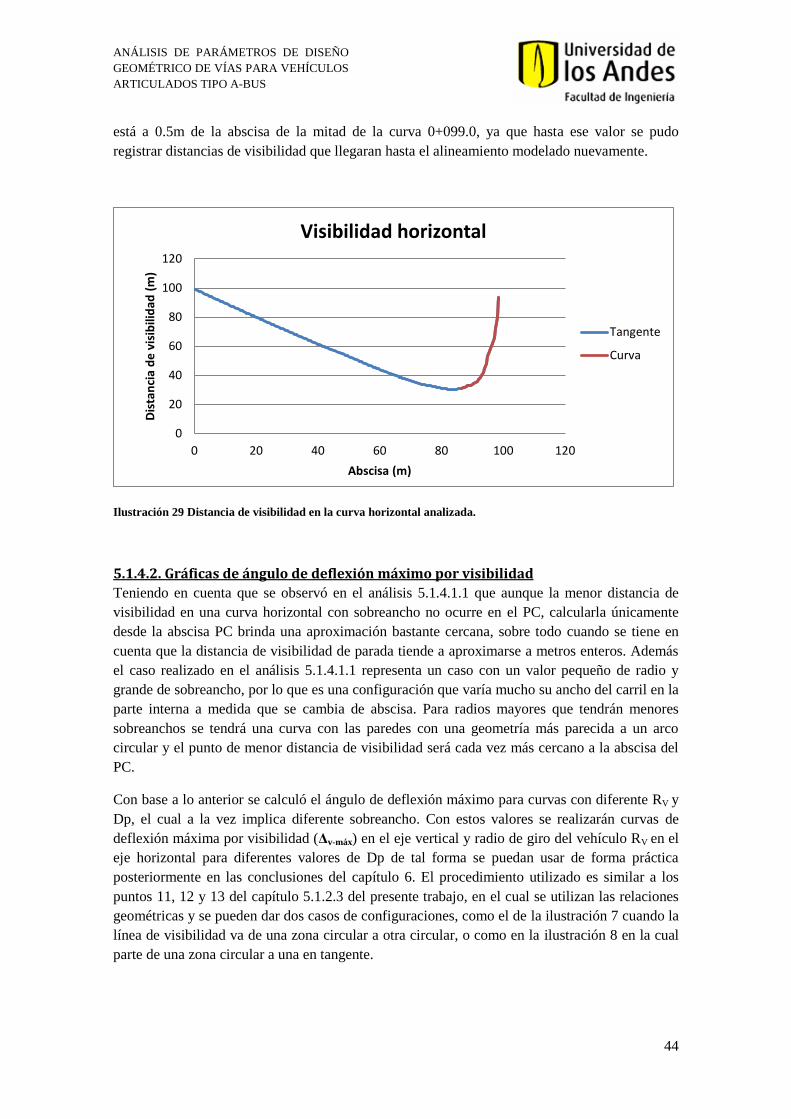
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
44
está a 0.5m de la abscisa de la mitad de la curva 0+099.0, ya que hasta ese valor se pudo
registrar distancias de visibilidad que llegaran hasta el alineamiento modelado nuevamente.
Ilustración 29 Distancia de visibilidad en la curva horizontal analizada.
5.1.4.2. Gráficas de ángulo de deflexión máximo por visibilidad
Teniendo en cuenta que se observó en el análisis 5.1.4.1.1 que aunque la menor distancia de
visibilidad en una curva horizontal con sobreancho no ocurre en el PC, calcularla únicamente
desde la abscisa PC brinda una aproximación bastante cercana, sobre todo cuando se tiene en
cuenta que la distancia de visibilidad de parada tiende a aproximarse a metros enteros. Además
el caso realizado en el análisis 5.1.4.1.1 representa un caso con un valor pequeño de radio y
grande de sobreancho, por lo que es una configuración que varía mucho su ancho del carril en la
parte interna a medida que se cambia de abscisa. Para radios mayores que tendrán menores
sobreanchos se tendrá una curva con las paredes con una geometría más parecida a un arco
circular y el punto de menor distancia de visibilidad será cada vez más cercano a la abscisa del
PC.
Con base a lo anterior se calculó el ángulo de deflexión máximo para curvas con diferente RV y
Dp, el cual a la vez implica diferente sobreancho. Con estos valores se realizarán curvas de
deflexión máxima por visibilidad (Δv-máx) en el eje vertical y radio de giro del vehículo RV en el
eje horizontal para diferentes valores de Dp de tal forma se puedan usar de forma práctica
posteriormente en las conclusiones del capítulo 6. El procedimiento utilizado es similar a los
puntos 11, 12 y 13 del capítulo 5.1.2.3 del presente trabajo, en el cual se utilizan las relaciones
geométricas y se pueden dar dos casos de configuraciones, como el de la ilustración 7 cuando la
línea de visibilidad va de una zona circular a otra circular, o como en la ilustración 8 en la cual
parte de una zona circular a una en tangente.
0
20
40
60
80
100
120
0 20 40 60 80 100 120
Dis
tan
cia
de
vis
ibili
dad
(m
)
Abscisa (m)
Visibilidad horizontal
Tangente
Curva
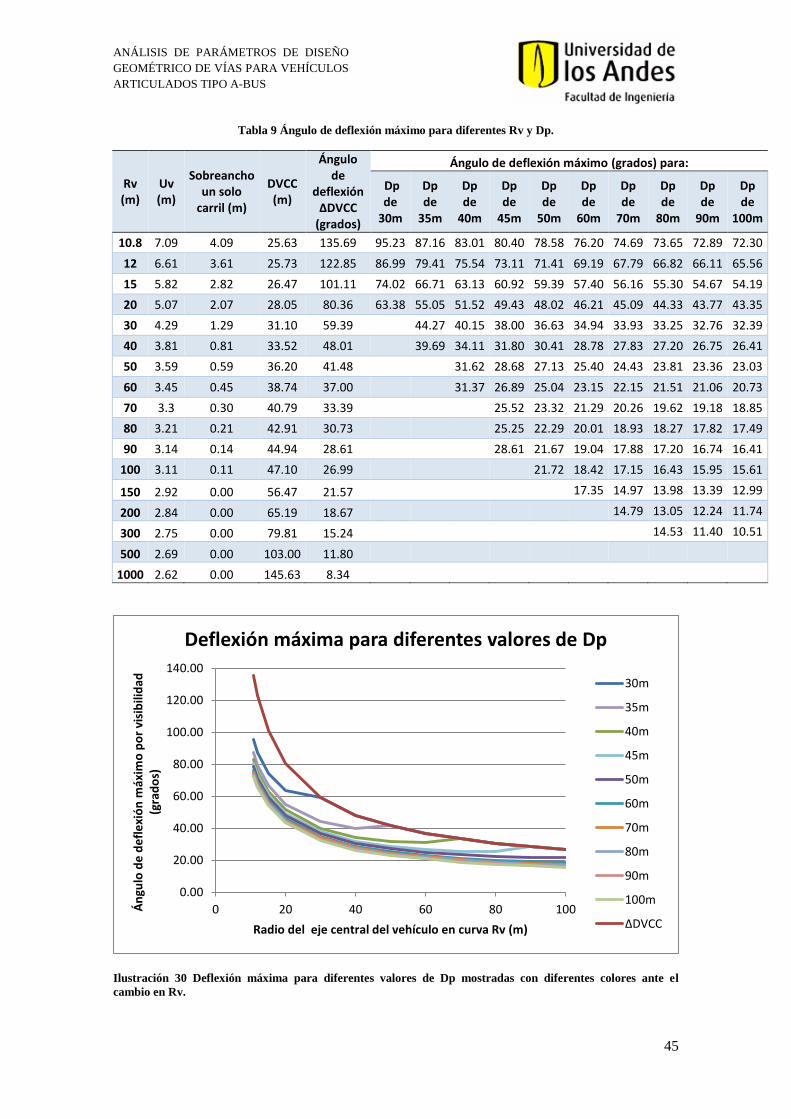
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
45
Tabla 9 Ángulo de deflexión máximo para diferentes Rv y Dp.
Rv (m)
Uv (m)
Sobreancho un solo
carril (m)
DVCC (m)
Ángulo de
deflexión ΔDVCC
(grados)
Ángulo de deflexión máximo (grados) para:
Dp de
30m
Dp de
35m
Dp de
40m
Dp de
45m
Dp de
50m
Dp de
60m
Dp de
70m
Dp de
80m
Dp de
90m
Dp de
100m
10.8 7.09 4.09 25.63 135.69 95.23 87.16 83.01 80.40 78.58 76.20 74.69 73.65 72.89 72.30
12 6.61 3.61 25.73 122.85 86.99 79.41 75.54 73.11 71.41 69.19 67.79 66.82 66.11 65.56
15 5.82 2.82 26.47 101.11 74.02 66.71 63.13 60.92 59.39 57.40 56.16 55.30 54.67 54.19
20 5.07 2.07 28.05 80.36 63.38 55.05 51.52 49.43 48.02 46.21 45.09 44.33 43.77 43.35
30 4.29 1.29 31.10 59.39 44.27 40.15 38.00 36.63 34.94 33.93 33.25 32.76 32.39
40 3.81 0.81 33.52 48.01 39.69 34.11 31.80 30.41 28.78 27.83 27.20 26.75 26.41
50 3.59 0.59 36.20 41.48 31.62 28.68 27.13 25.40 24.43 23.81 23.36 23.03
60 3.45 0.45 38.74 37.00 31.37 26.89 25.04 23.15 22.15 21.51 21.06 20.73
70 3.3 0.30 40.79 33.39 25.52 23.32 21.29 20.26 19.62 19.18 18.85
80 3.21 0.21 42.91 30.73 25.25 22.29 20.01 18.93 18.27 17.82 17.49
90 3.14 0.14 44.94 28.61 28.61 21.67 19.04 17.88 17.20 16.74 16.41
100 3.11 0.11 47.10 26.99 21.72 18.42 17.15 16.43 15.95 15.61
150 2.92 0.00 56.47 21.57 17.35 14.97 13.98 13.39 12.99
200 2.84 0.00 65.19 18.67 14.79 13.05 12.24 11.74
300 2.75 0.00 79.81 15.24 14.53 11.40 10.51
500 2.69 0.00 103.00 11.80
1000 2.62 0.00 145.63 8.34
Ilustración 30 Deflexión máxima para diferentes valores de Dp mostradas con diferentes colores ante el
cambio en Rv.
0.00
20.00
40.00
60.00
80.00
100.00
120.00
140.00
0 20 40 60 80 100Án
gulo
de
de
fle
xió
n m
áxim
o p
or
visi
bili
dad
(g
rad
os)
Radio del eje central del vehículo en curva Rv (m)
Deflexión máxima para diferentes valores de Dp
30m
35m
40m
45m
50m
60m
70m
80m
90m
100m
ΔDVCC
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
46
En la ilustración 30 se muestra en color rojo los valores para los cuales una línea de visibilidad
que parte del segmento circular, topa con la pared del túnel de forma tangencial y regresa
nuevamente a la trayectoria circular. Esta ocurre cuando se presenta la mínima Dp que se puede
presentar en una curva de cierto radio y su sobreancho correspondiente, la cual es equivalente a
DVCC explicada en el punto 11 del capítulo 5.1.2.3 y se observa en la ilustración 7, la cual se
traduce en un ángulo de deflexión que en caso de ser superado llevará a que el conductor en la
curva tenga una Dp igual a DVCC. Lo anterior también implica que siempre se cumplirá Dp
cuando este presente valores menores al DVCC de la curva, sin importar el ángulo de
deflexión que se utilice.
Sin embargo en aquellos casos en los cuales la distancia DVCC no es suficiente para obtener
cierto Dp, se debe reducir el ángulo de deflexión de tal forma se prolongue la línea de
visibilidad que topa con el muro hasta un punto sobre la trayectoria en tangente como se explica
en el punto 13 del capítulo 5.1.2.3. Se evidencia que para un mismo Dp esto ocurre en los radios
de menor magnitud, los cuales requieren de una deflexión menor a la de DVCC, y a medida que
aumenta Rv la curva se acerca a la roja hasta juntarse a esta nuevamente.
Además la gráfica se realizó hasta un Dp de 100m teniendo en cuenta que no se espera tener
valores superiores a este, ya que esta se presenta cuando la velocidad de diseño es de 60km/h y
la pendiente en bajada es de 10%, la cual presenta una situación bastante crítica. Además se
observa que para valores de Dp altos se tiene un comportamiento muy similar en las curvas
como se puede observar en las curvas con Dp entre 60m y 100m, mientras que para valores
pequeños el comportamiento varía bastante con sólo 5m de diferencia.
Finalmente se puede observar que no siempre a medida que aumenta el radio de la curva
disminuye el ángulo de deflexión máximo para un mismo Dp, ya que al considerarse dos
configuraciones geométricas diferentes, en los valores de radio cercanos al punto de cambio de
una a otra (ilustración 7 y 8) se presentan cambios abruptos de la deflexión máxima. Esto ocurre
ya que en caso de no cumplirse Dp con DVCC por poco, se deberá disminuir en gran
proporción la deflexión para obtener una parte de Dp en tangente, la cual aportará sólo un poco
más de distancia a la que brindaba el arco circular eliminado.
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
47
5.2. ANÁLISIS VERTICAL
Para analizar el diseño de las curvas verticales se realizó un análisis teórico con ecuaciones
basadas en la distancia de visibilidad de parada, en el cambio constante de pendiente y todos los
criterios de drenaje, operación y estética. Con este se analizó las implicaciones que tienen las
fórmulas utilizadas y su variación ante el cambio de los parámetros.
Además se realizó un análisis de las limitaciones geométricas del vehículo A-BUS, de tal forma
se conociera la influencia de estas en los parámetros de diseño para las curvas verticales.
5.2.1. ANÁLISIS TEÓRICO
Conociendo las ecuaciones que representan la curva parabólica vertical y las fórmulas y
criterios que se consideran para establecer su parámetro LCV en los puntos 18 y 19 de los
criterios asumidos para el análisis, se realizó un análisis de las implicaciones que tienen, de tal
forma se pueda tener una idea cualitativa y cuantitativa de su uso y la relación entre las
variables que intervienen.
5.2.1.1. Ecuaciones de curvas convexas
Utilizando las dos ecuaciones que permiten estimar LCV para las curvas convexas, se decidió
encontrar el límite para el cual se debe utilizar una y no otra de tal forma no sea siempre
necesario realizar el cálculo de ambas (Ecuaciones 12 y 13) para conocer el LCV que cumple
con la desigualdad que lo limita. Esto se realizó igualando ambas ecuaciones (asumiendo misma
LCV), con lo que se encontró la relación de |A| y Dp que delimita la utilización de las fórmulas.
𝐷𝑝2
658=
2 ∗ 𝐷𝑝 −658|𝐴|
|𝐴| (30)
Modificando lo obtenido, se encontró que se puede organizar como una función cuadrática
respecto a |A|.
(𝐷𝑝2
658) ∗ |𝐴|2 − (2 ∗ 𝐷𝑝) ∗ |𝐴| + 658 = 0
Resolviéndose utilizando la ecuación cuadrática se tiene:
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
48
|𝐴| =2 ∗ Dp ± √(2 ∗ Dp)2 − 4 ∗ (
𝐷𝑝2
658) ∗ 658
2 ∗ (𝐷𝑝2
658)
Se observa que el valor dentro de la raíz es 0, por lo que la ecuación tiene una única raíz y así
una única solución, la cual simplificando da que la relación entre |A| y Dp para la cual la LCV
es igual para ambas ecuaciones es:
|𝐴| ∗ 𝐷𝑝 = 658 (31)
Lo anterior implica que cuando se va a calcular una curva vertical, en el caso en el que la
multiplicación de |A| con Dp sea menor a 658 se podrá utilizar la ecuación de curva vertical
convexa del caso en el que Dp<LCV. En caso de ser mayor a 658 la multiplicación, se deberá
utilizar la correspondiente a Dp>LCV.
5.2.1.2. Ecuaciones de curvas cóncavas
De forma similar a lo realizado para el caso de las curvas convexas anteriormente analizadas, se
estableció la relación entre Dp y A que delimita el uso de las ecuaciones para los dos casos que
se dan en las curvas cóncavas. Igualando la LCV con las dos ecuaciones (14 y 15) se tiene:
𝐷𝑝2
120 + 3.5 ∗ 𝐷𝑝=
2 ∗ 𝐷𝑝 −120 + 3.5 ∗ 𝐷𝑝
|𝐴|
|𝐴| (32)
La cual reorganizándola da un polinomio de segundo orden respecto a |A|:
(𝐷𝑝2
120 + 3.5 ∗ 𝐷𝑝) ∗ |𝐴|2 − (2 ∗ 𝐷𝑝) ∗ |𝐴| + (120 + 3.5 ∗ 𝐷𝑝) = 0
Resolviendo para A con la ecuación cuadrática se obtiene:
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
49
|𝐴| =2 ∗ Dp ± √(2 ∗ Dp)2 − 4 ∗ (
𝐷𝑝2
120 + 3.5 ∗ 𝐷𝑝) ∗ (120 + 3.5 ∗ 𝐷𝑝)
2 ∗ (𝐷𝑝2
120 + 3.5 ∗ 𝐷𝑝)
Se observa que el valor dentro de la raíz es cero, por lo que se tiene una única solución, la cual
brinda la relación que debe tener |A| y Dp para que LCV de igual por ambas ecuaciones, siendo:
|𝐴| −120
𝐷𝑝= 3.5 (33)
Lo anterior implica que cuando se va a calcular una curva vertical cóncava, en el caso en el que
la los términos de la izquierda den un valor menor a 3.5 se podrá utilizar la ecuación de curva
vertical cóncava del caso en el que Dp<LCV. En caso de ser mayor a 3.5, se deberá utilizar la
correspondiente a Dp>LCV.
5.2.1.3. Comparación ecuaciones cóncavas y convexas
Tomando el par de ecuaciones con las que se calcula LCV para curvas cóncavas y convexas
según la diferencia entre Dp y LCV, se pudo observar por la forma en la que fueron deducidas
que estas varían únicamente en el valor 658 utilizado en las convexas, que para cóncavas es
reemplazado por (120+3.5*Dp), por lo que también se decidió analizar los casos para los cuales
se obtienen LCV mayores para cada uno de los casos. El valor igualado al que se llega cuando
dan las curvas cóncavas como convexas el mismo valor ocurre cuando:
658 = 120 + 3.5 ∗ 𝐷𝑝 (34)
Dando un valor de Dp de:
𝐷𝑝 = 153.71𝑚
Lo cual demuestra que para todos los valores que se obtengan de Dp menores a 153.71m será
mayor la LCV que se daba usar para las curvas cóncavas respecto a la convexas par un mismo
cambio de pendiente |A|. Lo anterior refleja cómo se disminuye la visibilidad de los usuarios por
la noche en una curva cóncava en comparación con una convexa debido al menor alcance de las
luces del vehículo.
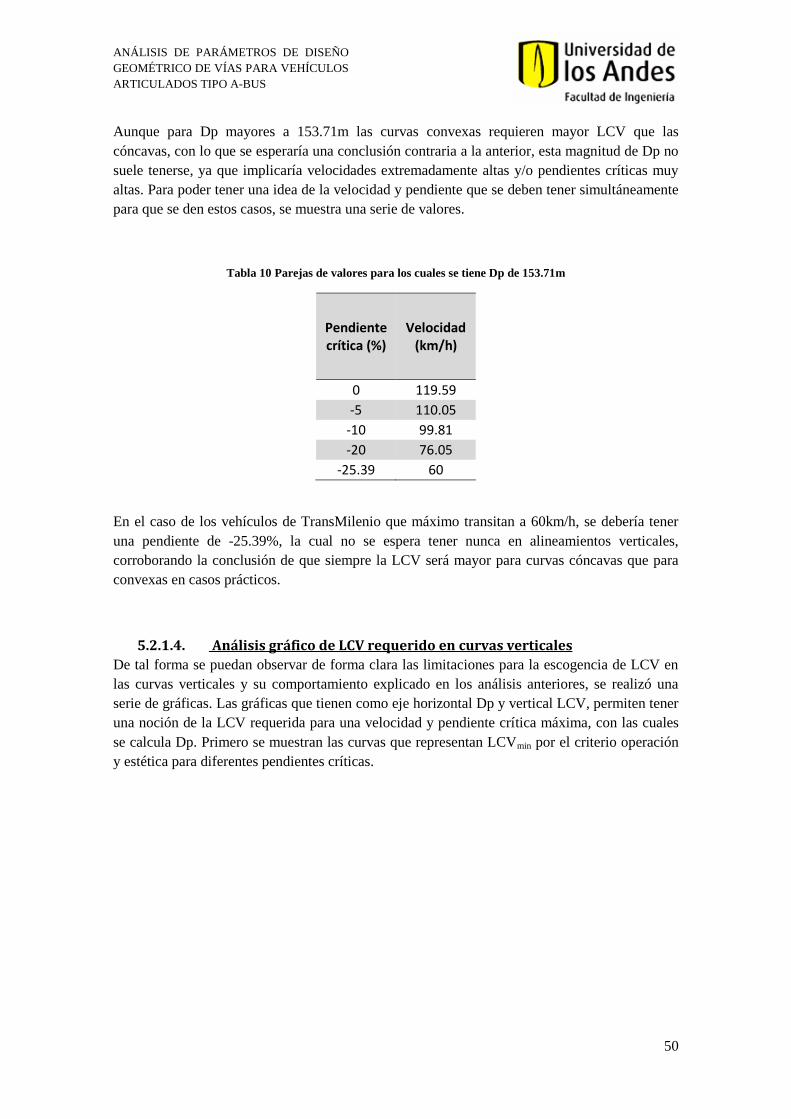
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
50
Aunque para Dp mayores a 153.71m las curvas convexas requieren mayor LCV que las
cóncavas, con lo que se esperaría una conclusión contraria a la anterior, esta magnitud de Dp no
suele tenerse, ya que implicaría velocidades extremadamente altas y/o pendientes críticas muy
altas. Para poder tener una idea de la velocidad y pendiente que se deben tener simultáneamente
para que se den estos casos, se muestra una serie de valores.
Tabla 10 Parejas de valores para los cuales se tiene Dp de 153.71m
Pendiente crítica (%)
Velocidad (km/h)
0 119.59
-5 110.05
-10 99.81
-20 76.05
-25.39 60
En el caso de los vehículos de TransMilenio que máximo transitan a 60km/h, se debería tener
una pendiente de -25.39%, la cual no se espera tener nunca en alineamientos verticales,
corroborando la conclusión de que siempre la LCV será mayor para curvas cóncavas que para
convexas en casos prácticos.
5.2.1.4. Análisis gráfico de LCV requerido en curvas verticales
De tal forma se puedan observar de forma clara las limitaciones para la escogencia de LCV en
las curvas verticales y su comportamiento explicado en los análisis anteriores, se realizó una
serie de gráficas. Las gráficas que tienen como eje horizontal Dp y vertical LCV, permiten tener
una noción de la LCV requerida para una velocidad y pendiente crítica máxima, con las cuales
se calcula Dp. Primero se muestran las curvas que representan LCVmin por el criterio operación
y estética para diferentes pendientes críticas.
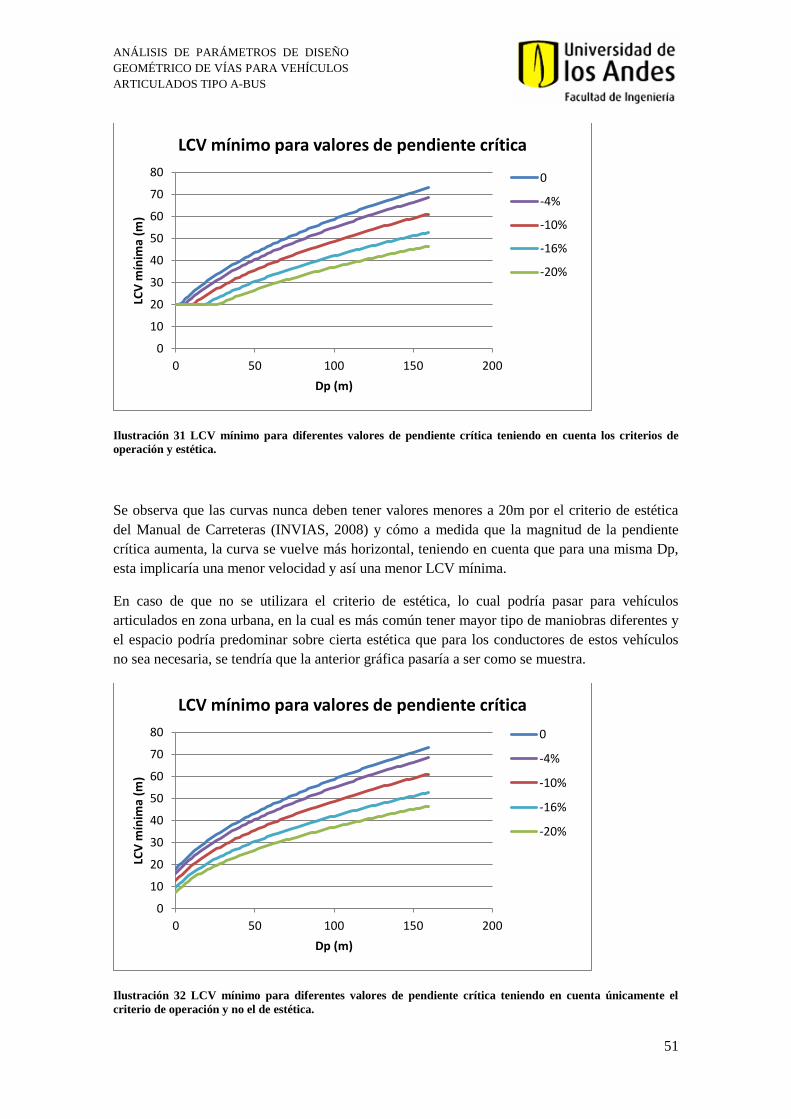
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
51
Ilustración 31 LCV mínimo para diferentes valores de pendiente crítica teniendo en cuenta los criterios de
operación y estética.
Se observa que las curvas nunca deben tener valores menores a 20m por el criterio de estética
del Manual de Carreteras (INVIAS, 2008) y cómo a medida que la magnitud de la pendiente
crítica aumenta, la curva se vuelve más horizontal, teniendo en cuenta que para una misma Dp,
esta implicaría una menor velocidad y así una menor LCV mínima.
En caso de que no se utilizara el criterio de estética, lo cual podría pasar para vehículos
articulados en zona urbana, en la cual es más común tener mayor tipo de maniobras diferentes y
el espacio podría predominar sobre cierta estética que para los conductores de estos vehículos
no sea necesaria, se tendría que la anterior gráfica pasaría a ser como se muestra.
Ilustración 32 LCV mínimo para diferentes valores de pendiente crítica teniendo en cuenta únicamente el
criterio de operación y no el de estética.
0
10
20
30
40
50
60
70
80
0 50 100 150 200
LCV
mín
ima
(m)
Dp (m)
LCV mínimo para valores de pendiente crítica
0
-4%
-10%
-16%
-20%
0
10
20
30
40
50
60
70
80
0 50 100 150 200
LCV
mín
ima
(m)
Dp (m)
LCV mínimo para valores de pendiente crítica
0
-4%
-10%
-16%
-20%
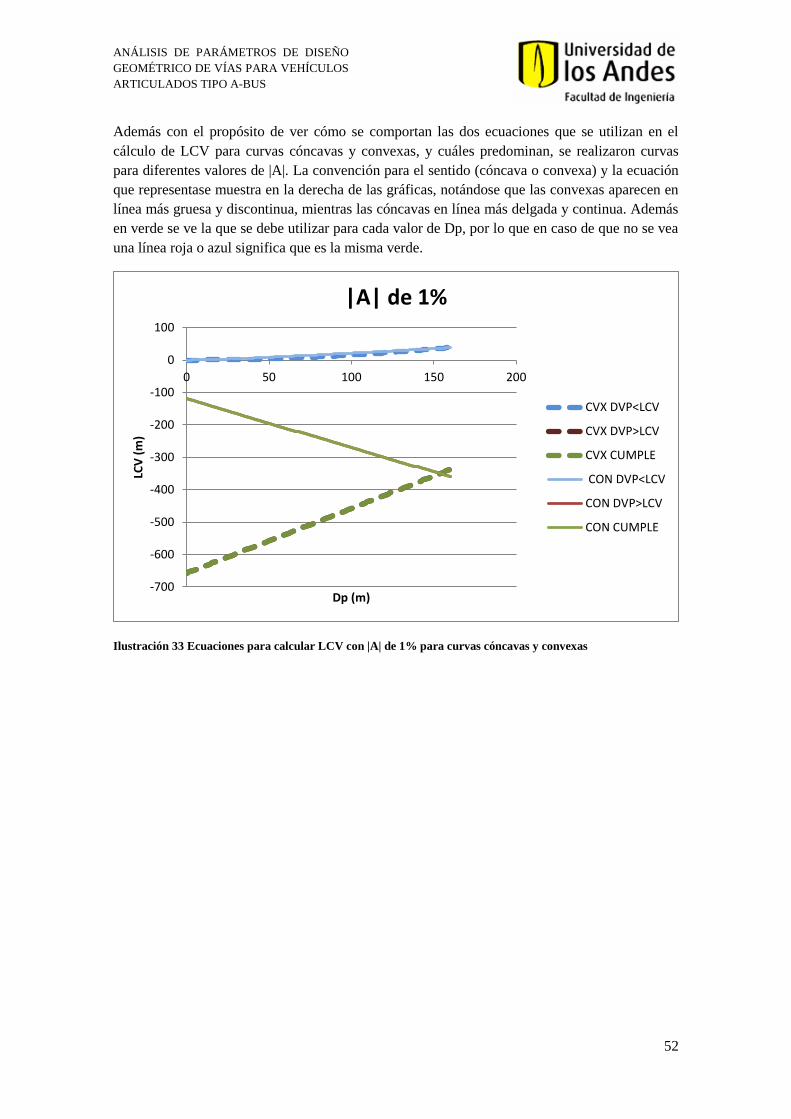
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
52
Además con el propósito de ver cómo se comportan las dos ecuaciones que se utilizan en el
cálculo de LCV para curvas cóncavas y convexas, y cuáles predominan, se realizaron curvas
para diferentes valores de |A|. La convención para el sentido (cóncava o convexa) y la ecuación
que representase muestra en la derecha de las gráficas, notándose que las convexas aparecen en
línea más gruesa y discontinua, mientras las cóncavas en línea más delgada y continua. Además
en verde se ve la que se debe utilizar para cada valor de Dp, por lo que en caso de que no se vea
una línea roja o azul significa que es la misma verde.
Ilustración 33 Ecuaciones para calcular LCV con |A| de 1% para curvas cóncavas y convexas
-700
-600
-500
-400
-300
-200
-100
0
100
0 50 100 150 200
LCV
(m
)
Dp (m)
|A| de 1%
CVX DVP<LCV
CVX DVP>LCV
CVX CUMPLE
CON DVP<LCV
CON DVP>LCV
CON CUMPLE
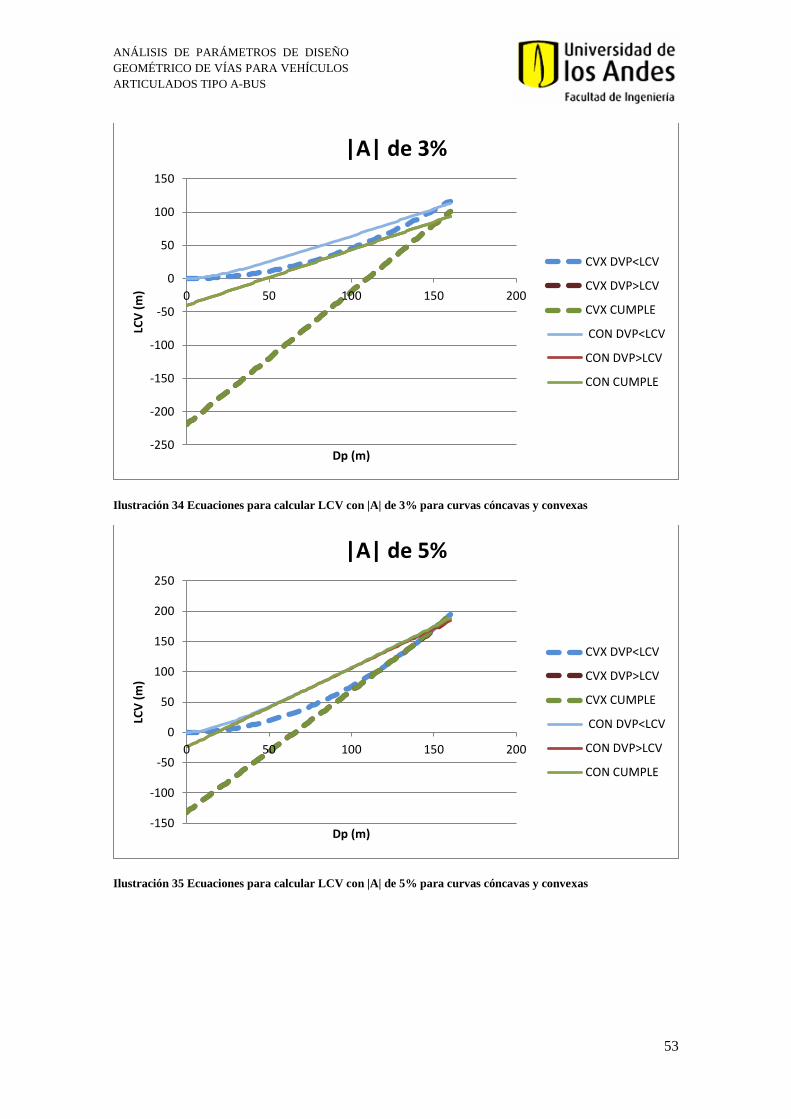
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
53
Ilustración 34 Ecuaciones para calcular LCV con |A| de 3% para curvas cóncavas y convexas
Ilustración 35 Ecuaciones para calcular LCV con |A| de 5% para curvas cóncavas y convexas
-250
-200
-150
-100
-50
0
50
100
150
0 50 100 150 200
LCV
(m
)
Dp (m)
|A| de 3%
CVX DVP<LCV
CVX DVP>LCV
CVX CUMPLE
CON DVP<LCV
CON DVP>LCV
CON CUMPLE
-150
-100
-50
0
50
100
150
200
250
0 50 100 150 200
LCV
(m
)
Dp (m)
|A| de 5%
CVX DVP<LCV
CVX DVP>LCV
CVX CUMPLE
CON DVP<LCV
CON DVP>LCV
CON CUMPLE
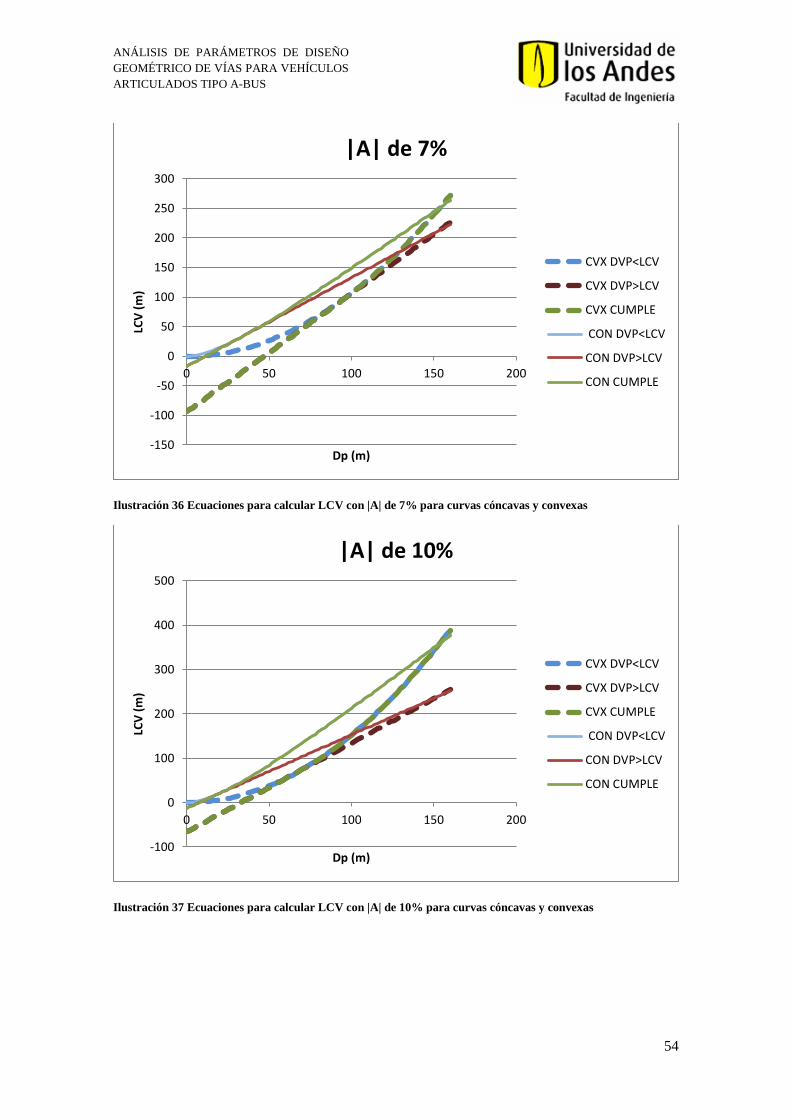
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
54
Ilustración 36 Ecuaciones para calcular LCV con |A| de 7% para curvas cóncavas y convexas
Ilustración 37 Ecuaciones para calcular LCV con |A| de 10% para curvas cóncavas y convexas
-150
-100
-50
0
50
100
150
200
250
300
0 50 100 150 200
LCV
(m
)
Dp (m)
|A| de 7%
CVX DVP<LCV
CVX DVP>LCV
CVX CUMPLE
CON DVP<LCV
CON DVP>LCV
CON CUMPLE
-100
0
100
200
300
400
500
0 50 100 150 200
LCV
(m
)
Dp (m)
|A| de 10%
CVX DVP<LCV
CVX DVP>LCV
CVX CUMPLE
CON DVP<LCV
CON DVP>LCV
CON CUMPLE
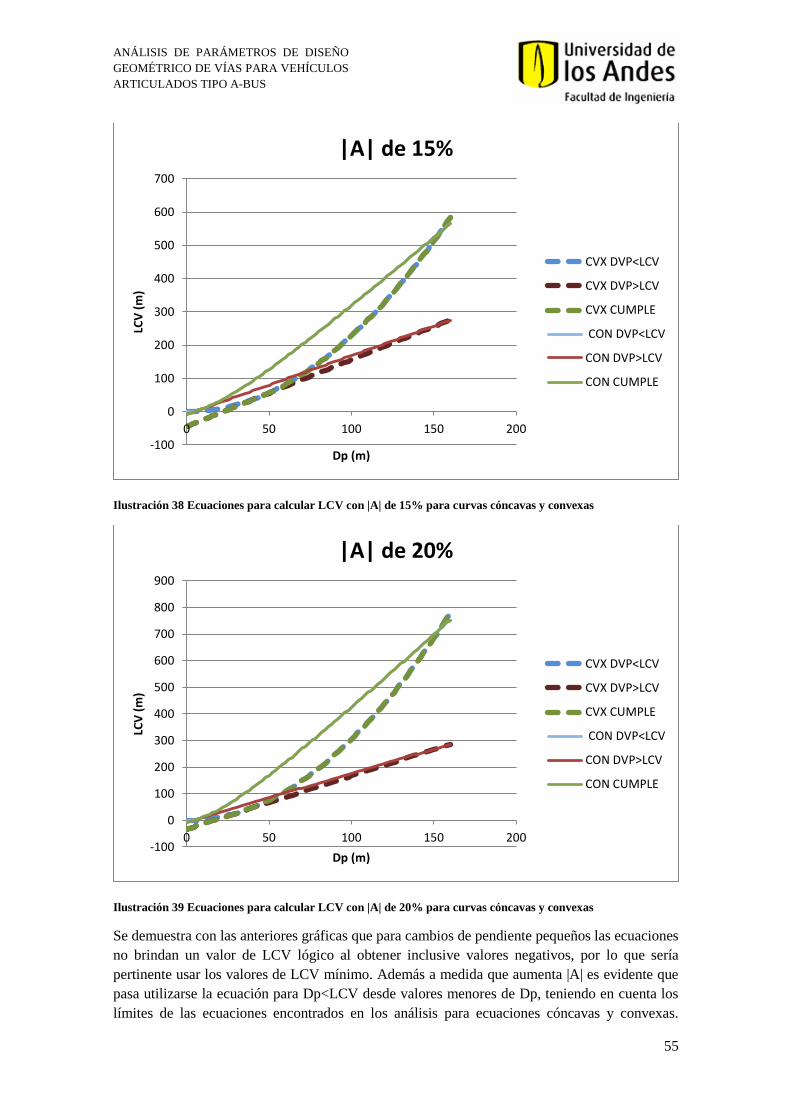
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
55
Ilustración 38 Ecuaciones para calcular LCV con |A| de 15% para curvas cóncavas y convexas
Ilustración 39 Ecuaciones para calcular LCV con |A| de 20% para curvas cóncavas y convexas
Se demuestra con las anteriores gráficas que para cambios de pendiente pequeños las ecuaciones
no brindan un valor de LCV lógico al obtener inclusive valores negativos, por lo que sería
pertinente usar los valores de LCV mínimo. Además a medida que aumenta |A| es evidente que
pasa utilizarse la ecuación para Dp<LCV desde valores menores de Dp, teniendo en cuenta los
límites de las ecuaciones encontrados en los análisis para ecuaciones cóncavas y convexas.
-100
0
100
200
300
400
500
600
700
0 50 100 150 200
LCV
(m
)
Dp (m)
|A| de 15%
CVX DVP<LCV
CVX DVP>LCV
CVX CUMPLE
CON DVP<LCV
CON DVP>LCV
CON CUMPLE
-100
0
100
200
300
400
500
600
700
800
900
0 50 100 150 200
LCV
(m
)
Dp (m)
|A| de 20%
CVX DVP<LCV
CVX DVP>LCV
CVX CUMPLE
CON DVP<LCV
CON DVP>LCV
CON CUMPLE
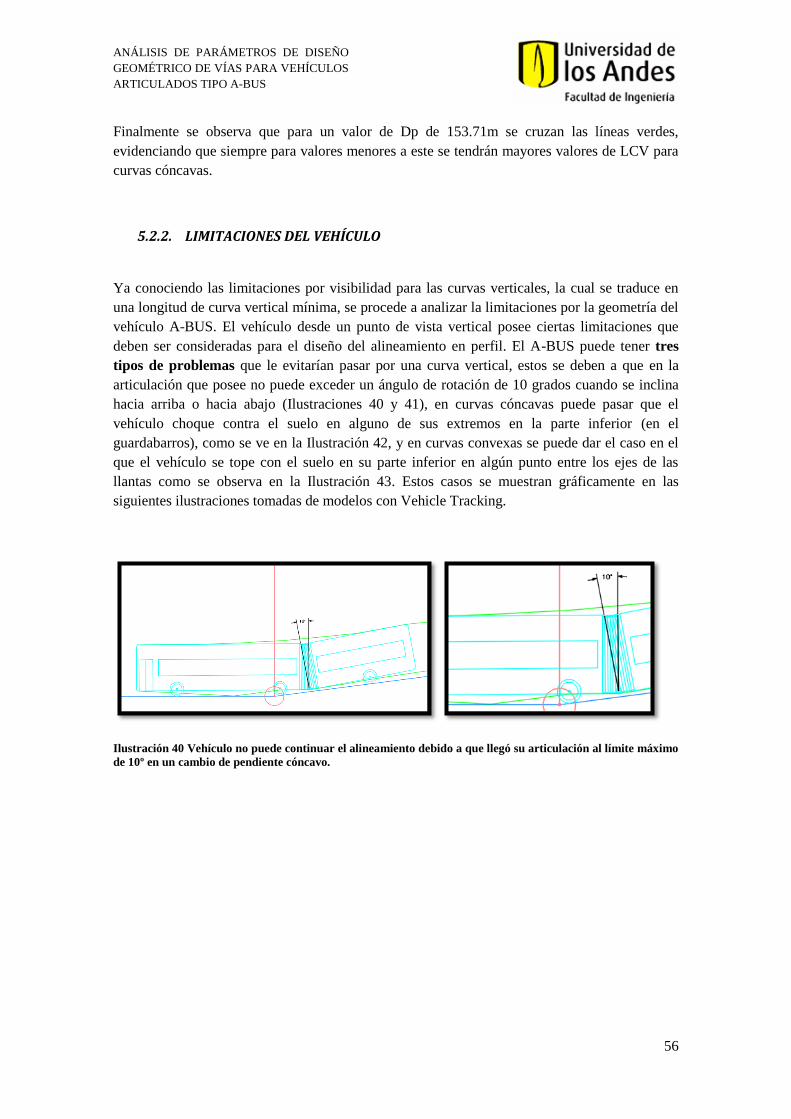
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
56
Finalmente se observa que para un valor de Dp de 153.71m se cruzan las líneas verdes,
evidenciando que siempre para valores menores a este se tendrán mayores valores de LCV para
curvas cóncavas.
5.2.2. LIMITACIONES DEL VEHÍCULO
Ya conociendo las limitaciones por visibilidad para las curvas verticales, la cual se traduce en
una longitud de curva vertical mínima, se procede a analizar la limitaciones por la geometría del
vehículo A-BUS. El vehículo desde un punto de vista vertical posee ciertas limitaciones que
deben ser consideradas para el diseño del alineamiento en perfil. El A-BUS puede tener tres
tipos de problemas que le evitarían pasar por una curva vertical, estos se deben a que en la
articulación que posee no puede exceder un ángulo de rotación de 10 grados cuando se inclina
hacia arriba o hacia abajo (Ilustraciones 40 y 41), en curvas cóncavas puede pasar que el
vehículo choque contra el suelo en alguno de sus extremos en la parte inferior (en el
guardabarros), como se ve en la Ilustración 42, y en curvas convexas se puede dar el caso en el
que el vehículo se tope con el suelo en su parte inferior en algún punto entre los ejes de las
llantas como se observa en la Ilustración 43. Estos casos se muestran gráficamente en las
siguientes ilustraciones tomadas de modelos con Vehicle Tracking.
Ilustración 40 Vehículo no puede continuar el alineamiento debido a que llegó su articulación al límite máximo
de 10º en un cambio de pendiente cóncavo.
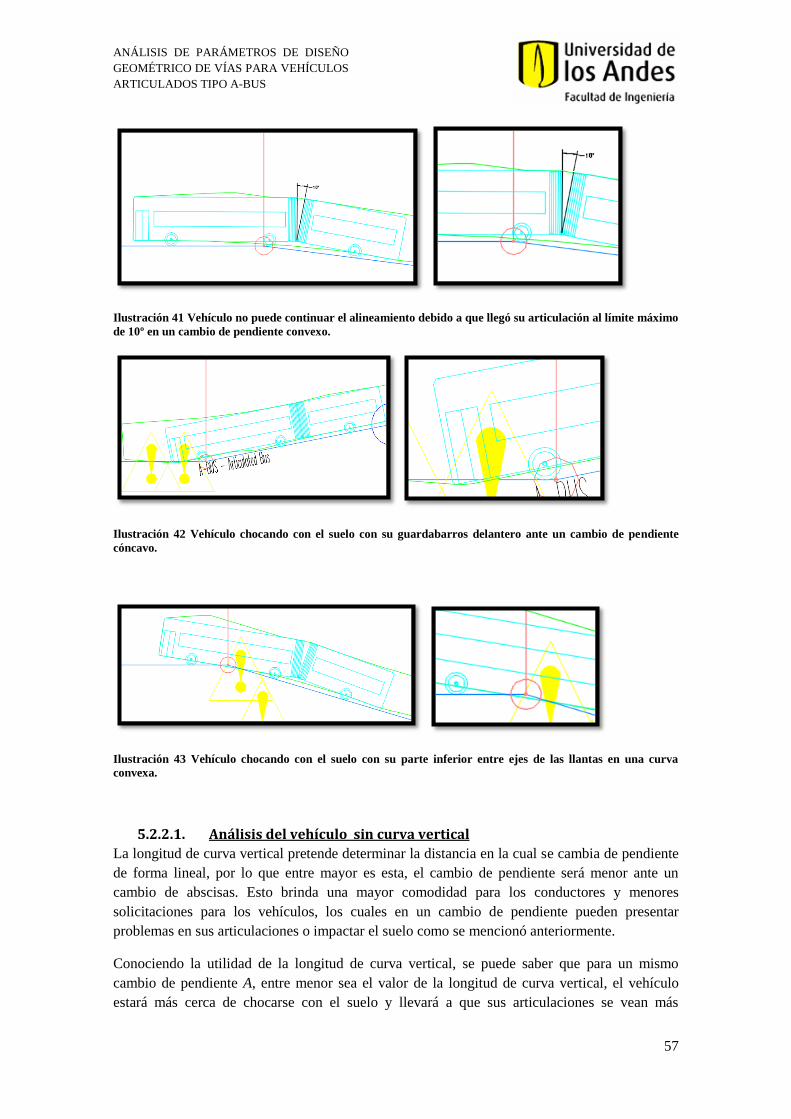
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
57
Ilustración 41 Vehículo no puede continuar el alineamiento debido a que llegó su articulación al límite máximo
de 10º en un cambio de pendiente convexo.
Ilustración 42 Vehículo chocando con el suelo con su guardabarros delantero ante un cambio de pendiente
cóncavo.
Ilustración 43 Vehículo chocando con el suelo con su parte inferior entre ejes de las llantas en una curva
convexa.
5.2.2.1. Análisis del vehículo sin curva vertical
La longitud de curva vertical pretende determinar la distancia en la cual se cambia de pendiente
de forma lineal, por lo que entre mayor es esta, el cambio de pendiente será menor ante un
cambio de abscisas. Esto brinda una mayor comodidad para los conductores y menores
solicitaciones para los vehículos, los cuales en un cambio de pendiente pueden presentar
problemas en sus articulaciones o impactar el suelo como se mencionó anteriormente.
Conociendo la utilidad de la longitud de curva vertical, se puede saber que para un mismo
cambio de pendiente A, entre menor sea el valor de la longitud de curva vertical, el vehículo
estará más cerca de chocarse con el suelo y llevará a que sus articulaciones se vean más
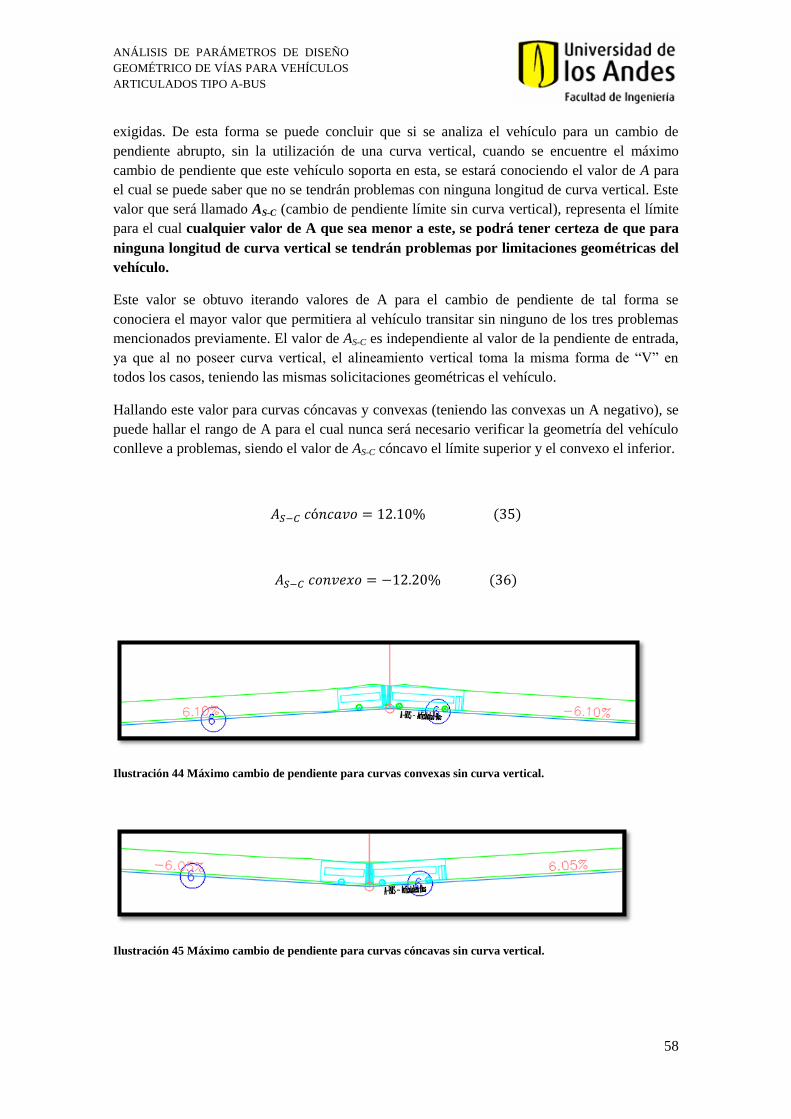
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
58
exigidas. De esta forma se puede concluir que si se analiza el vehículo para un cambio de
pendiente abrupto, sin la utilización de una curva vertical, cuando se encuentre el máximo
cambio de pendiente que este vehículo soporta en esta, se estará conociendo el valor de A para
el cual se puede saber que no se tendrán problemas con ninguna longitud de curva vertical. Este
valor que será llamado AS-C (cambio de pendiente límite sin curva vertical), representa el límite
para el cual cualquier valor de A que sea menor a este, se podrá tener certeza de que para
ninguna longitud de curva vertical se tendrán problemas por limitaciones geométricas del
vehículo.
Este valor se obtuvo iterando valores de A para el cambio de pendiente de tal forma se
conociera el mayor valor que permitiera al vehículo transitar sin ninguno de los tres problemas
mencionados previamente. El valor de AS-C es independiente al valor de la pendiente de entrada,
ya que al no poseer curva vertical, el alineamiento vertical toma la misma forma de “V” en
todos los casos, teniendo las mismas solicitaciones geométricas el vehículo.
Hallando este valor para curvas cóncavas y convexas (teniendo las convexas un A negativo), se
puede hallar el rango de A para el cual nunca será necesario verificar la geometría del vehículo
conlleve a problemas, siendo el valor de AS-C cóncavo el límite superior y el convexo el inferior.
𝐴𝑆−𝐶 𝑐ó𝑛𝑐𝑎𝑣𝑜 = 12.10% (35)
𝐴𝑆−𝐶 𝑐𝑜𝑛𝑣𝑒𝑥𝑜 = −12.20% (36)
Ilustración 44 Máximo cambio de pendiente para curvas convexas sin curva vertical.
Ilustración 45 Máximo cambio de pendiente para curvas cóncavas sin curva vertical.
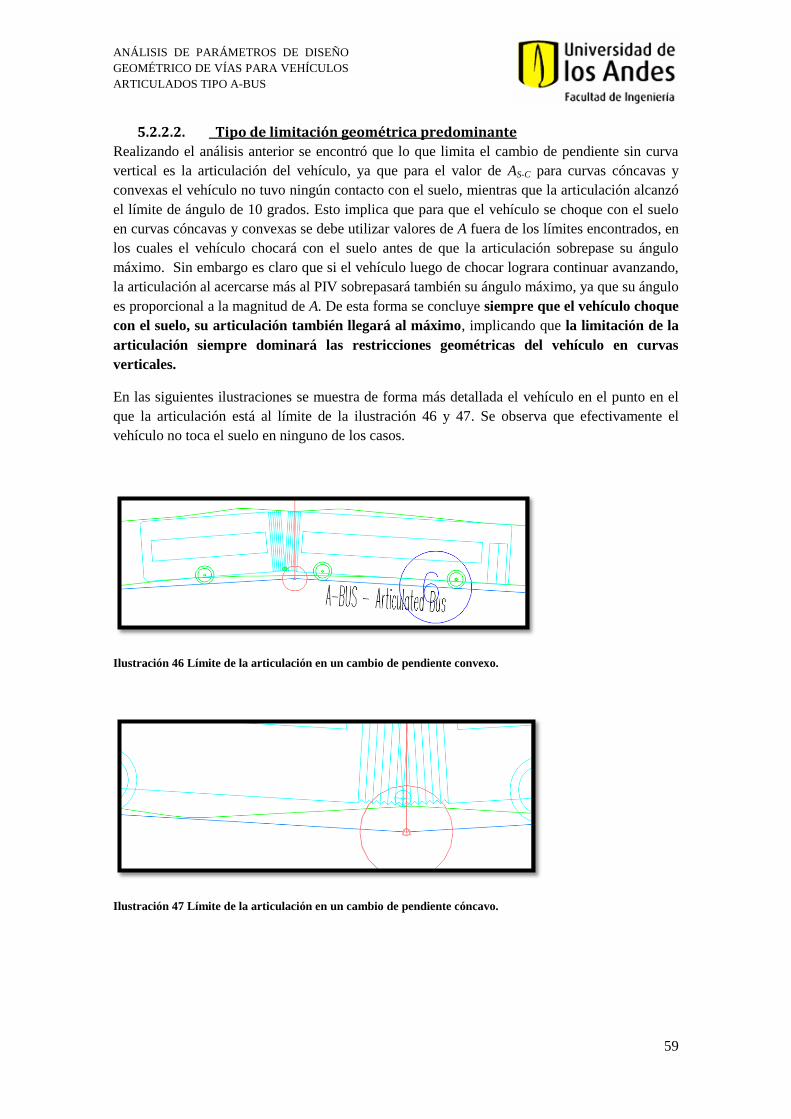
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
59
5.2.2.2. Tipo de limitación geométrica predominante
Realizando el análisis anterior se encontró que lo que limita el cambio de pendiente sin curva
vertical es la articulación del vehículo, ya que para el valor de AS-C para curvas cóncavas y
convexas el vehículo no tuvo ningún contacto con el suelo, mientras que la articulación alcanzó
el límite de ángulo de 10 grados. Esto implica que para que el vehículo se choque con el suelo
en curvas cóncavas y convexas se debe utilizar valores de A fuera de los límites encontrados, en
los cuales el vehículo chocará con el suelo antes de que la articulación sobrepase su ángulo
máximo. Sin embargo es claro que si el vehículo luego de chocar lograra continuar avanzando,
la articulación al acercarse más al PIV sobrepasará también su ángulo máximo, ya que su ángulo
es proporcional a la magnitud de A. De esta forma se concluye siempre que el vehículo choque
con el suelo, su articulación también llegará al máximo, implicando que la limitación de la
articulación siempre dominará las restricciones geométricas del vehículo en curvas
verticales.
En las siguientes ilustraciones se muestra de forma más detallada el vehículo en el punto en el
que la articulación está al límite de la ilustración 46 y 47. Se observa que efectivamente el
vehículo no toca el suelo en ninguno de los casos.
Ilustración 46 Límite de la articulación en un cambio de pendiente convexo.
Ilustración 47 Límite de la articulación en un cambio de pendiente cóncavo.

ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
60
5.2.2.3. Influencia de la pendiente inicial en una curva con A y LCV
establecidos
La ecuación de la curva parabólica vertical, como se mostró anteriormente en la Ecuación 12,
tiene como parámetros LCV, el cambio de pendiente A, pero también el valor de cada
pendiente, siendo la inicial (i1) la utilizada en la fórmula, por lo que curvas con el mismo A y
LCV, pero diferentes pendientes, no presentarán las mismas limitaciones geométricas para el
vehículo.
El valor de la pendiente inicial que dará la parábola que brinda mayores exigencias para el
vehículo, por la forma característica de la parábola, se espera se presente cuando se pasa por el
punto mínimo o máximo de esta, ya que en este tipo de hueco o montaña el vehículo presentará
un mayor ángulo de rotación en su articulación ante el cambio de signo de la pendiente. De esta
forma si este mínimo o máximo de la parábola coincide en abscisas con el PIV, se esperará el
vehículo presente una mayor solicitación para un mismo valor de A y LCV. Para que esto pase
tanto la pendiente de entrada como la de salida deberán tener la misma magnitud de pendiente
pero con signos contrarios de tal forma la curva vertical sea simétrica respecto a una vertical en
el PIV. Para demostrar lo anterior, se utilizarán las fórmulas que representan la curva de la
parábola.
La abscisa desde el PCV en la cual se encuentra el valor máximo o mínimo de la parábola, se
encuentra igualando la pendiente de esta a cero, con lo que se tiene que ocurre en:
𝑋𝑐𝑎𝑚𝑏𝑖𝑜 𝑑𝑒 𝑝𝑒𝑛𝑑𝑖𝑒𝑛𝑡𝑒 =−𝑖1
𝐴∗ 𝐿𝐶𝑉 (37)
Si se quiere que esta coincida con la abscisa del PIV, la cual es la mitad de LCV se tiene:
𝐿𝐶𝑉
2=
−𝑖1
𝐴∗ 𝐿𝐶𝑉 (38)
Teniendo finalmente que esto ocurre cuando la pendiente de entrada es:
𝑖1 = −𝐴
2
Demostrándose que si es una curva vertical cóncava (con A positivo) ambas pendientes tendrán
la misma magnitud de pendiente y la inicial será negativa, mientras que si es convexa (con A
negativo) ambas tendrán la misma magnitud de pendiente y la inicial será positiva.
Debido a que no es fácil demostrar matemáticamente que estas curvas simétricas respecto a la
vertical son las críticas para el paso de un vehículo, se mostrará con modelos de Vehicle
Tracking lo anterior. Para esto se fijó una LCV de 20m y cambiando la pendiente inicial i1, se
encontró el máximo A que permite que el vehículo transite al iterar. Se empezó por una curva
simétrica respecto a la vertical hasta una con pendiente inicial positiva de 10%, mostrándose
con los resultados que efectivamente el A permisible incrementa para cada uno de los 4 ensayos
realizados.
1. Dejando ambas pendientes de la misma magnitud, se encontró que el máximo A
permisible para LCV de 20m fue de 37.46%, observándose que para un A de 37.48%
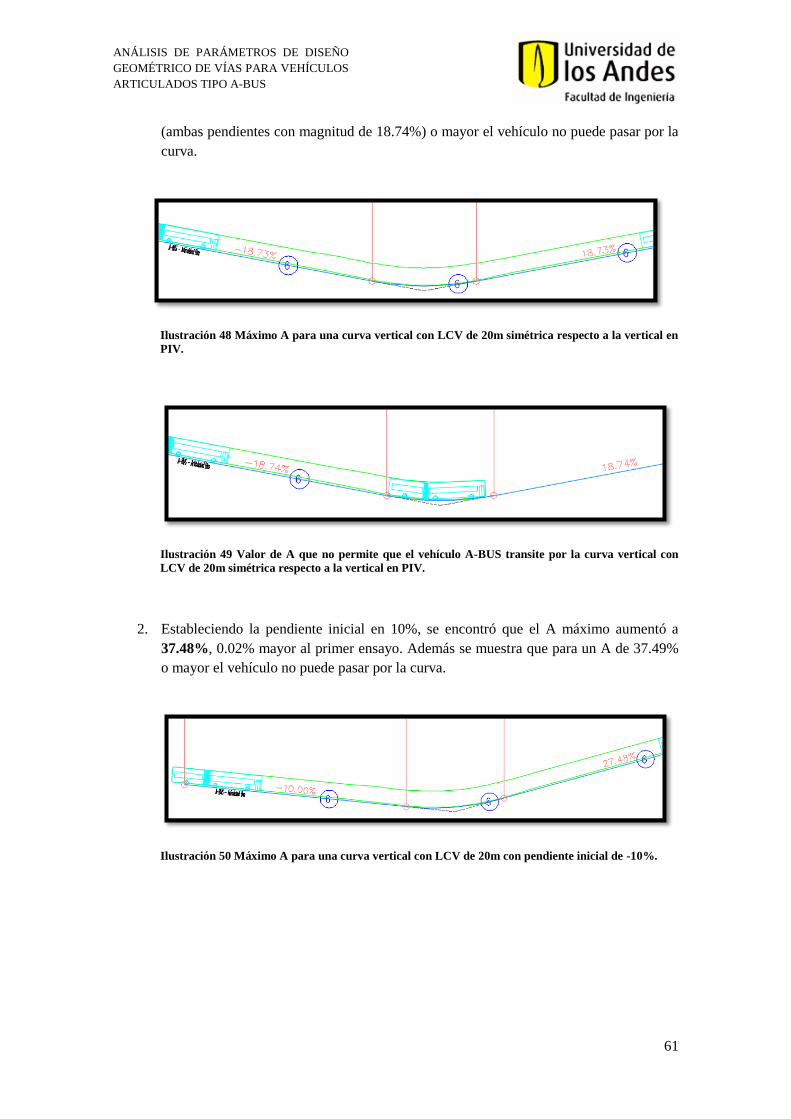
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
61
(ambas pendientes con magnitud de 18.74%) o mayor el vehículo no puede pasar por la
curva.
Ilustración 48 Máximo A para una curva vertical con LCV de 20m simétrica respecto a la vertical en
PIV.
Ilustración 49 Valor de A que no permite que el vehículo A-BUS transite por la curva vertical con
LCV de 20m simétrica respecto a la vertical en PIV.
2. Estableciendo la pendiente inicial en 10%, se encontró que el A máximo aumentó a
37.48%, 0.02% mayor al primer ensayo. Además se muestra que para un A de 37.49%
o mayor el vehículo no puede pasar por la curva.
Ilustración 50 Máximo A para una curva vertical con LCV de 20m con pendiente inicial de -10%.
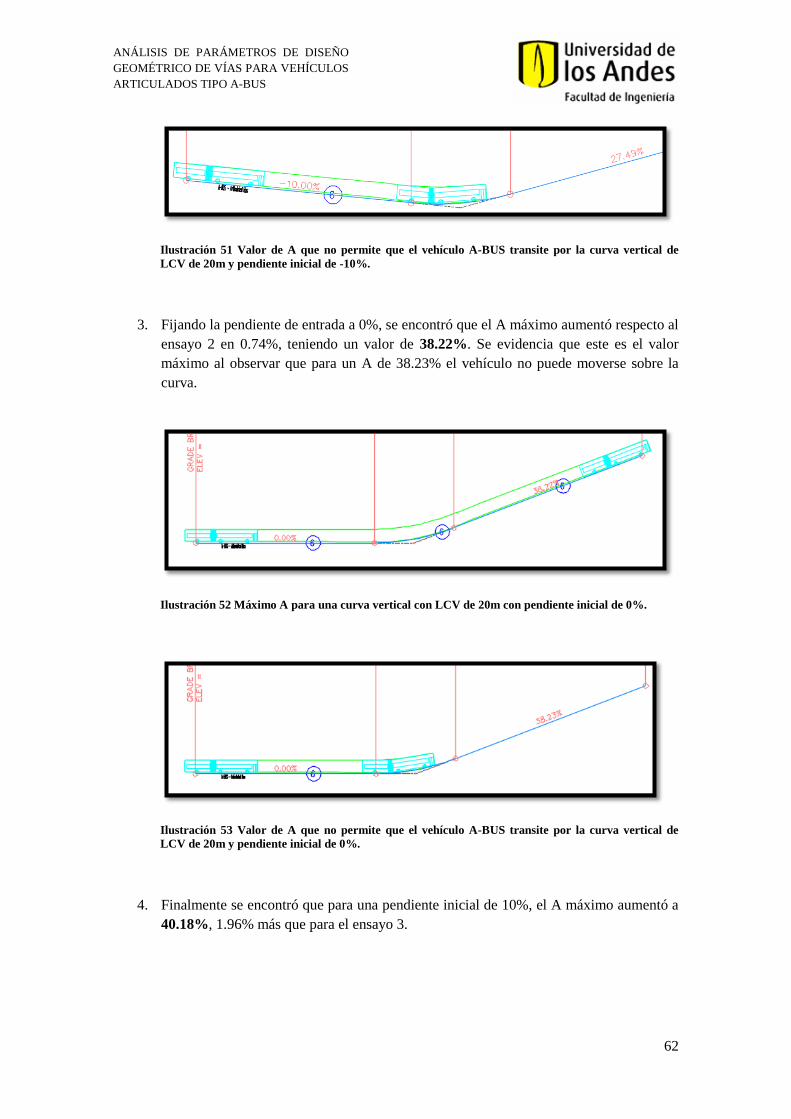
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
62
Ilustración 51 Valor de A que no permite que el vehículo A-BUS transite por la curva vertical de
LCV de 20m y pendiente inicial de -10%.
3. Fijando la pendiente de entrada a 0%, se encontró que el A máximo aumentó respecto al
ensayo 2 en 0.74%, teniendo un valor de 38.22%. Se evidencia que este es el valor
máximo al observar que para un A de 38.23% el vehículo no puede moverse sobre la
curva.
Ilustración 52 Máximo A para una curva vertical con LCV de 20m con pendiente inicial de 0%.
Ilustración 53 Valor de A que no permite que el vehículo A-BUS transite por la curva vertical de
LCV de 20m y pendiente inicial de 0%.
4. Finalmente se encontró que para una pendiente inicial de 10%, el A máximo aumentó a
40.18%, 1.96% más que para el ensayo 3.

ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
63
Ilustración 54 Máximo A para una curva vertical con LCV de 20m con pendiente inicial de 10%.
Se concluye que para un mismo A y LCV, es más crítico para un vehículo transitar por
una curva vertical con ambas pendientes de la misma magnitud, disminuyendo a medida
que se pierde simetría respecto a la vertical en PIV. Este caso se presenta en la mayoría de
puentes y túneles bajo puentes que se construyen en el ámbito urbano.
Además se observa que para curvas en las que las pendientes tienen signos contrarios la
diferencia del A admisible es poca, variando un valor menor a 1% para el caso en el que ambas
pendientes tienen misma magnitud y el caso en el que una de estas tiene valor de 0%, por lo que
se considera suficiente analizar las curvas siempre para el caso crítico.
5.2.2.4. Análisis de curvas verticales con cambios de pendiente superiores a AS-C
Ya conociendo que para cambios de pendiente mayores a 12.10% en curvas cóncavas y 12.20%
en convexas se debe tener una mínima longitud de curva vertical que garantice el vehículo A-
BUS pueda transitar por esta, se analizará los valores que estos deben tener para valores que
sobrepasen estos límites. Aunque cambios de pendiente de magnitudes tan altas se espera no se
utilicen mucho en la práctica, debido a que altas pendientes requieren de una alta potencia
mecánica del vehículo, probablemente exigiéndolo demasiado, estas se analizarán para casos
extremos en los que se puedan requerir para parqueaderos, accesos y maniobras de los vehículos
ante limitaciones espaciales.
Para este análisis se encontrará la mínima longitud de curva vertical requerida para un valor
específico de A, realizando el análisis únicamente para curvas con pendientes de entrada y
salida de misma magnitud. Lo anterior se hace teniendo en cuenta los resultados del anterior
análisis, en los cuales se encontró esta es la configuración crítica para un mismo A, y se espera
los resultados varíen despreciablemente para curvas con pendientes de entrada y salida de
signos opuestos. No es necesario considerar los casos en los que ambas pendientes son del
mismo signo debido a que como el análisis se hace para cambios de pendiente superiores a 12%,
se tendrían que usar pendientes demasiado altas que no son factibles en la práctica.
El proceso se realizó iterando valores de LCV de tal forma se encontrara justo el valor mínimo
para que el vehículo transite por la curva de forma similar a los realizados para el análisis
anterior. Los resultados obtenidos fueron los siguientes:
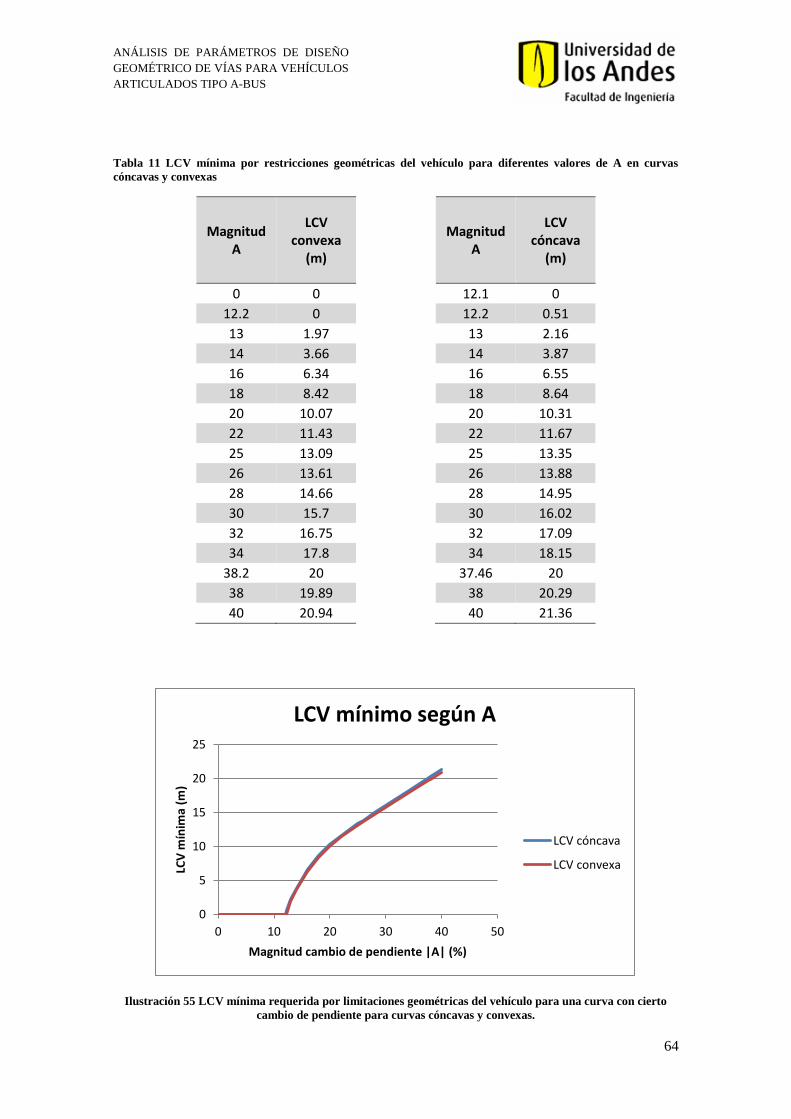
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
64
Tabla 11 LCV mínima por restricciones geométricas del vehículo para diferentes valores de A en curvas
cóncavas y convexas
Magnitud A
LCV convexa
(m)
Magnitud A
LCV cóncava
(m)
0 0
12.1 0
12.2 0
12.2 0.51
13 1.97
13 2.16
14 3.66
14 3.87
16 6.34
16 6.55
18 8.42
18 8.64
20 10.07
20 10.31
22 11.43
22 11.67
25 13.09
25 13.35
26 13.61
26 13.88
28 14.66
28 14.95
30 15.7
30 16.02
32 16.75
32 17.09
34 17.8
34 18.15
38.2 20
37.46 20
38 19.89
38 20.29
40 20.94
40 21.36
Ilustración 55 LCV mínima requerida por limitaciones geométricas del vehículo para una curva con cierto
cambio de pendiente para curvas cóncavas y convexas.
0
5
10
15
20
25
0 10 20 30 40 50
LCV
mín
ima
(m)
Magnitud cambio de pendiente |A| (%)
LCV mínimo según A
LCV cóncava
LCV convexa
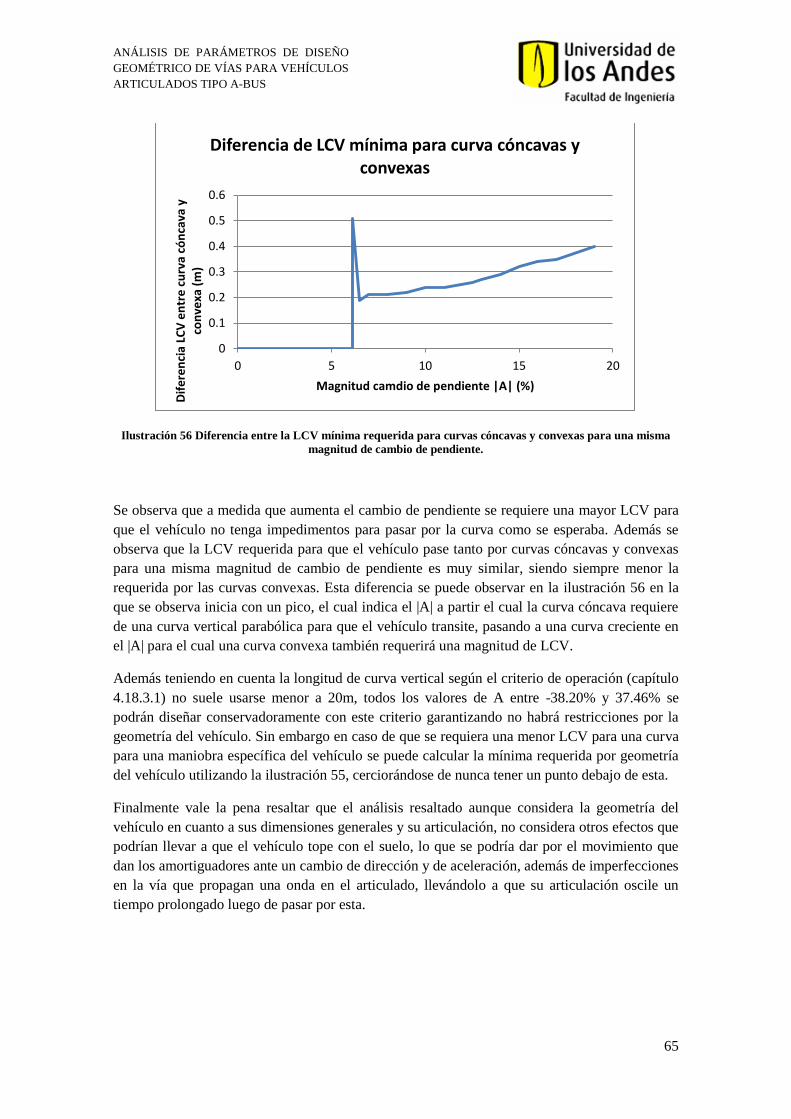
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
65
Ilustración 56 Diferencia entre la LCV mínima requerida para curvas cóncavas y convexas para una misma
magnitud de cambio de pendiente.
Se observa que a medida que aumenta el cambio de pendiente se requiere una mayor LCV para
que el vehículo no tenga impedimentos para pasar por la curva como se esperaba. Además se
observa que la LCV requerida para que el vehículo pase tanto por curvas cóncavas y convexas
para una misma magnitud de cambio de pendiente es muy similar, siendo siempre menor la
requerida por las curvas convexas. Esta diferencia se puede observar en la ilustración 56 en la
que se observa inicia con un pico, el cual indica el |A| a partir el cual la curva cóncava requiere
de una curva vertical parabólica para que el vehículo transite, pasando a una curva creciente en
el |A| para el cual una curva convexa también requerirá una magnitud de LCV.
Además teniendo en cuenta la longitud de curva vertical según el criterio de operación (capítulo
4.18.3.1) no suele usarse menor a 20m, todos los valores de A entre -38.20% y 37.46% se
podrán diseñar conservadoramente con este criterio garantizando no habrá restricciones por la
geometría del vehículo. Sin embargo en caso de que se requiera una menor LCV para una curva
para una maniobra específica del vehículo se puede calcular la mínima requerida por geometría
del vehículo utilizando la ilustración 55, cerciorándose de nunca tener un punto debajo de esta.
Finalmente vale la pena resaltar que el análisis resaltado aunque considera la geometría del
vehículo en cuanto a sus dimensiones generales y su articulación, no considera otros efectos que
podrían llevar a que el vehículo tope con el suelo, lo que se podría dar por el movimiento que
dan los amortiguadores ante un cambio de dirección y de aceleración, además de imperfecciones
en la vía que propagan una onda en el articulado, llevándolo a que su articulación oscile un
tiempo prolongado luego de pasar por esta.
0
0.1
0.2
0.3
0.4
0.5
0.6
0 5 10 15 20
Dif
ere
nci
a LC
V e
ntr
e c
urv
a có
nca
va y
co
nve
xa (
m)
Magnitud camdio de pendiente |A| (%)
Diferencia de LCV mínima para curva cóncavas y convexas
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
66
6. CONCLUSIONES
Para velocidades menores a 23.15km/h los diseños de curvas horizontales simples no
estarán limitados por el criterio de equilibrio de fuerzas ante la aceleración centrípeta,
sino por restricciones del vehículo A-BUS.
En curvas horizontales simples el radio de giro no está limitado únicamente por el
criterio de estabilidad de fuerzas ante la aceleración centrípeta en la curva, sino por el
tiempo de maniobra del conductor al pasar por esta, ya que no puede tomar el ángulo de
dirección inmediatamente empieza a transitar por la curva circular.
Para las curvas horizontales simples se tiene una velocidad máxima por el criterio del
tiempo de maniobra, la cual depende del radio de giro, siendo esta velocidad menor para
radios menores.
Los sobreanchos calculados por medio del procedimiento empleado con Vehicle
Tracking brindan valores siempre menores a los calculados con AASHTO PGDHS,
siendo ciertos valores de AASHTO PGDHS exagerados para radios de giro menores.
La optimización de los sobreanchos requeridos por los vehículos lleva a que no siempre
se pueda asumir que la longitud en la cual se desarrolla el sobreancho en una curva
circular simple se haga en la misma longitud de transición de peralte Lr. Se debe tener
en cuenta la abscisa en la cual el vehículo alcanza su máximo ancho en curva,
verificando el máximo sobreancho se haya desarrollado completamente en ese punto o
antes.
La menor distancia de visibilidad en una curva horizontal en un túnel se presentará en
tangente antes de la abscisa del PC, teniendo en cuenta la geometría circular se modifica
con el sobreancho.
Siempre que se tenga una curva circular en túnel con ángulo de deflexión menor a
ΔDVCC/2 para esta, se tendrá visibilidad infinita.
Se puede garantizar que la distancia de visibilidad de parada (Dp) en un túnel se
cumplirá siempre que este tenga un valor menor al DVCC de la curva circular a
verificar, sin importar el ángulo de deflexión de esta.
En todos los casos prácticos para vehículos tipo A-BUS en zonas urbanas, como en el
sistema de TransMilenio se tendrán LCV mayores para curvas cóncavas que para
convexas ante un mismo cambio de pendiente en el alineamiento |A|.
La geometría del vehículo A-BUS y sus restricciones de la articulación nunca
restringirán los diseños de curvas verticales que tengan un cambio de pendiente A entre
12.10% y -12.2%.
Siempre que la geometría del vehículo limite los diseños de curvas verticales, será por
la limitación de la articulación del vehículo a giros superiores a 10 grados. No se puede
tener el caso en el que el vehículo choque con el suelo pero la articulación no pase su
límite máximo, siempre que choque el vehículo con el suelo, la articulación excederá su
ángulo máximo.
Para una curva vertical con mismo valor de cambio de pendiente (A) y longitud de
curva vertical (LCV), cuando la pendiente de entrada como la de salida poseen la
misma magnitud y se forma una curva simétrica respecto a la vertical en el PIV, se tiene
las mayores solicitaciones geométricas para el vehículo. A medida que se pierde la
simetría las restricciones del vehículo son menores.
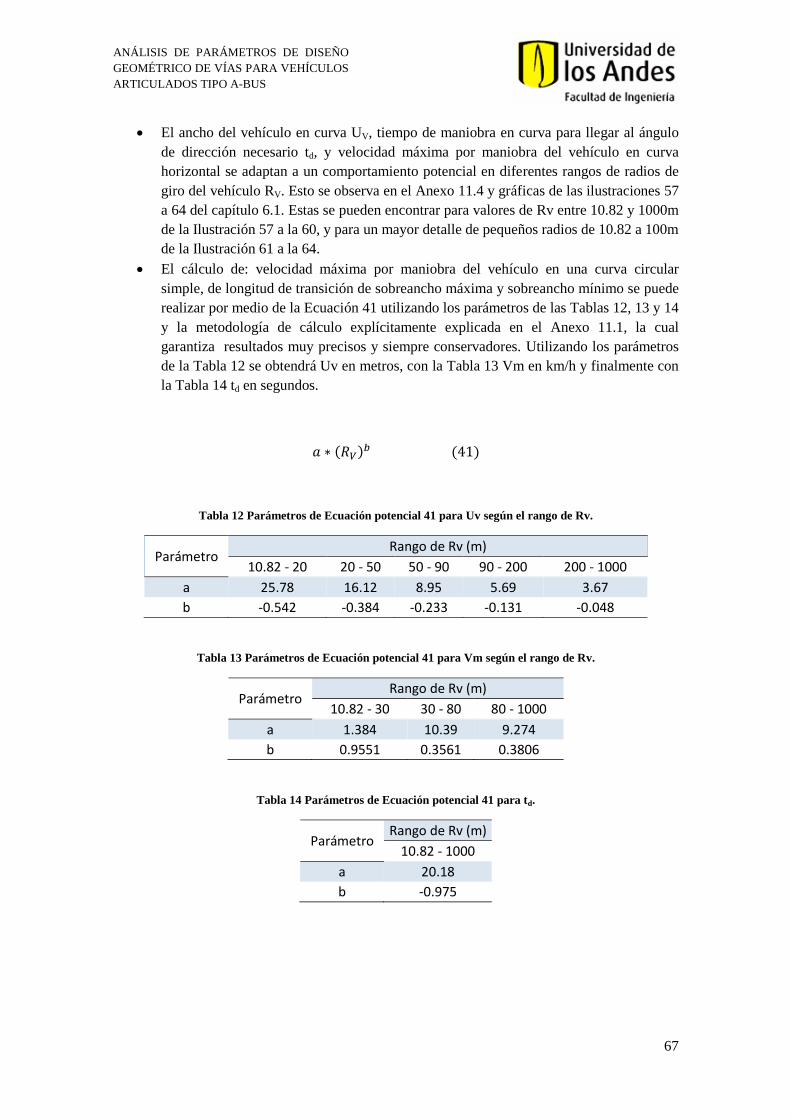
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
67
El ancho del vehículo en curva UV, tiempo de maniobra en curva para llegar al ángulo
de dirección necesario td, y velocidad máxima por maniobra del vehículo en curva
horizontal se adaptan a un comportamiento potencial en diferentes rangos de radios de
giro del vehículo RV. Esto se observa en el Anexo 11.4 y gráficas de las ilustraciones 57
a 64 del capítulo 6.1. Estas se pueden encontrar para valores de Rv entre 10.82 y 1000m
de la Ilustración 57 a la 60, y para un mayor detalle de pequeños radios de 10.82 a 100m
de la Ilustración 61 a la 64.
El cálculo de: velocidad máxima por maniobra del vehículo en una curva circular
simple, de longitud de transición de sobreancho máxima y sobreancho mínimo se puede
realizar por medio de la Ecuación 41 utilizando los parámetros de las Tablas 12, 13 y 14
y la metodología de cálculo explícitamente explicada en el Anexo 11.1, la cual
garantiza resultados muy precisos y siempre conservadores. Utilizando los parámetros
de la Tabla 12 se obtendrá Uv en metros, con la Tabla 13 Vm en km/h y finalmente con
la Tabla 14 td en segundos.
𝑎 ∗ (𝑅𝑉)𝑏 (41)
Tabla 12 Parámetros de Ecuación potencial 41 para Uv según el rango de Rv.
Parámetro Rango de Rv (m)
10.82 - 20 20 - 50 50 - 90 90 - 200 200 - 1000
a 25.78 16.12 8.95 5.69 3.67
b -0.542 -0.384 -0.233 -0.131 -0.048
Tabla 13 Parámetros de Ecuación potencial 41 para Vm según el rango de Rv.
Parámetro Rango de Rv (m)
10.82 - 30 30 - 80 80 - 1000
a 1.384 10.39 9.274
b 0.9551 0.3561 0.3806
Tabla 14 Parámetros de Ecuación potencial 41 para td.
Parámetro Rango de Rv (m)
10.82 - 1000
a 20.18
b -0.975
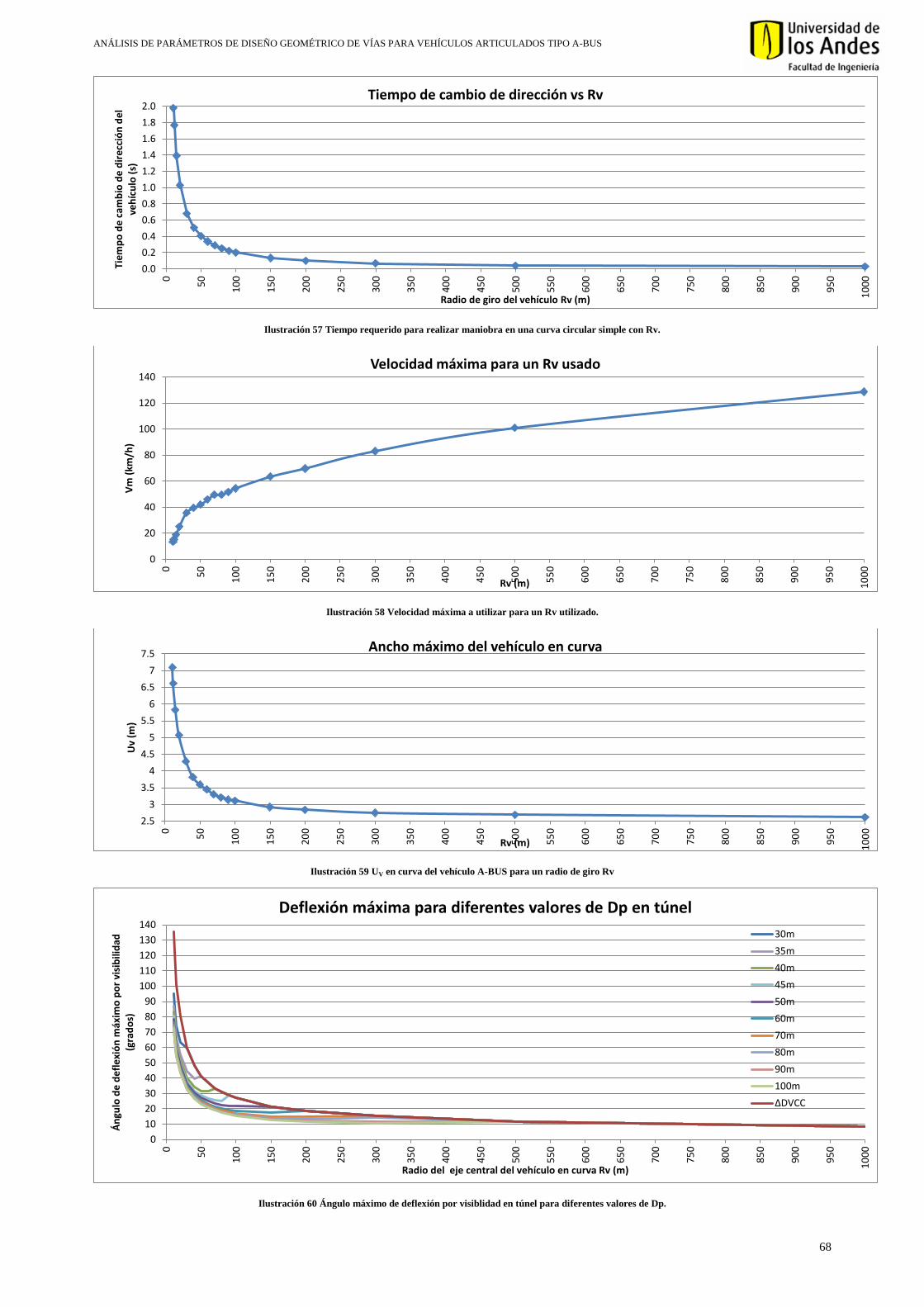
ANÁLISIS DE PARÁMETROS DE DISEÑO GEOMÉTRICO DE VÍAS PARA VEHÍCULOS ARTICULADOS TIPO A-BUS
68
Ilustración 57 Tiempo requerido para realizar maniobra en una curva circular simple con Rv.
Ilustración 58 Velocidad máxima a utilizar para un Rv utilizado.
Ilustración 59 UV en curva del vehículo A-BUS para un radio de giro Rv
Ilustración 60 Ángulo máximo de deflexión por visiblidad en túnel para diferentes valores de Dp.
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
2.0
0
50
10
0
15
0
20
0
25
0
30
0
35
0
40
0
45
0
50
0
55
0
60
0
65
0
70
0
75
0
80
0
85
0
90
0
95
0
10
00
Tie
mp
o d
e c
amb
io d
e d
ire
cció
n d
el
veh
ícu
lo (
s)
Radio de giro del vehículo Rv (m)
Tiempo de cambio de dirección vs Rv
0
20
40
60
80
100
120
140
0
50
10
0
15
0
20
0
25
0
30
0
35
0
40
0
45
0
50
0
55
0
60
0
65
0
70
0
75
0
80
0
85
0
90
0
95
0
10
00
Vm
(km
/h)
Rv (m)
Velocidad máxima para un Rv usado
2.5
3
3.5
4
4.5
5
5.5
6
6.5
7
7.5
0
50
10
0
15
0
20
0
25
0
30
0
35
0
40
0
45
0
50
0
55
0
60
0
65
0
70
0
75
0
80
0
85
0
90
0
95
0
10
00
Uv
(m)
Rv (m)
Ancho máximo del vehículo en curva
0
10
20
30
40
50
60
70
80
90
100
110
120
130
140
0
50
10
0
15
0
20
0
25
0
30
0
35
0
40
0
45
0
50
0
55
0
60
0
65
0
70
0
75
0
80
0
85
0
90
0
95
0
10
00
Án
gulo
de
de
fle
xió
n m
áxim
o p
or
visi
bili
dad
(g
rad
os)
Radio del eje central del vehículo en curva Rv (m)
Deflexión máxima para diferentes valores de Dp en túnel
30m
35m
40m
45m
50m
60m
70m
80m
90m
100m
ΔDVCC
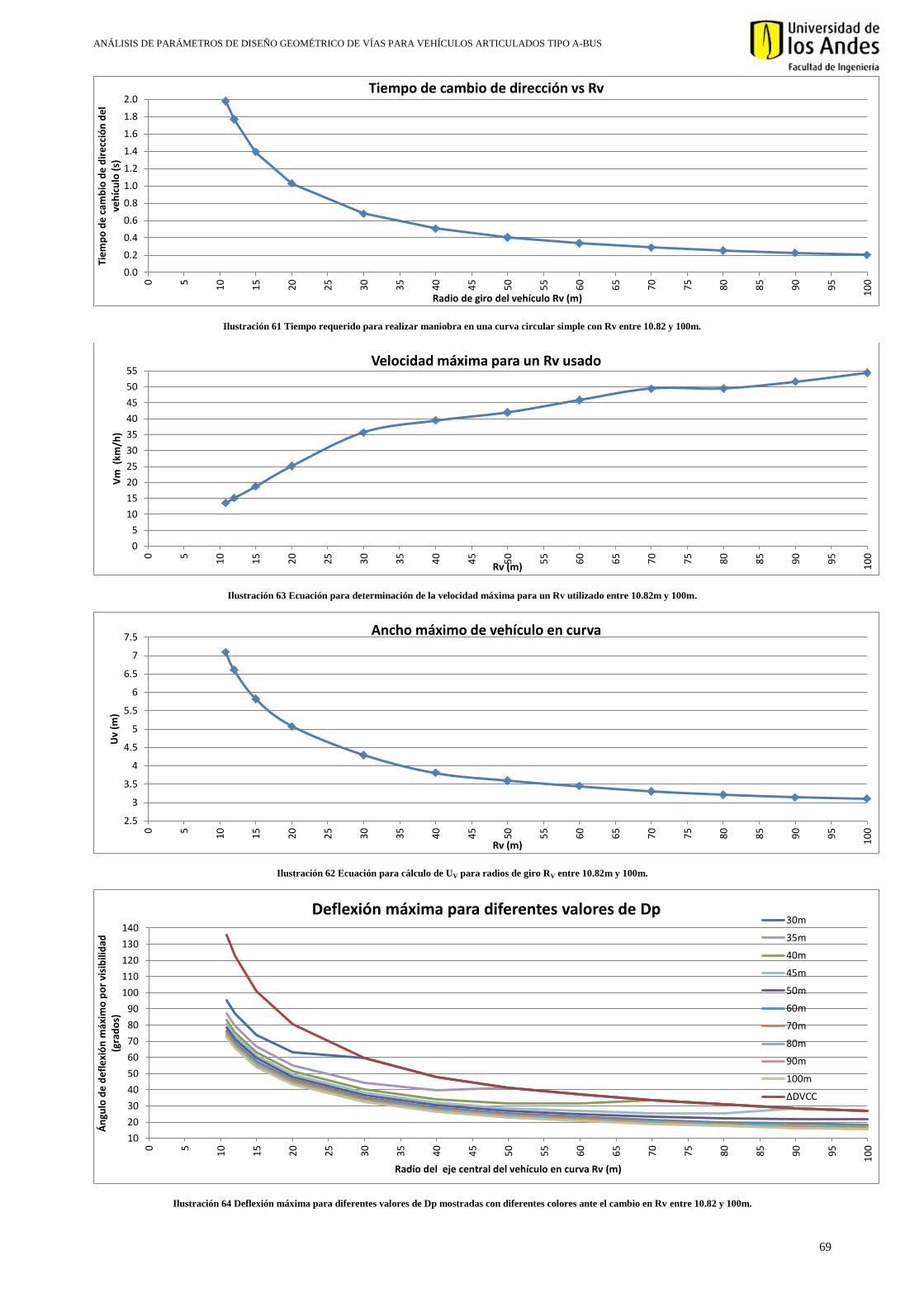
ANÁLISIS DE PARÁMETROS DE DISEÑO GEOMÉTRICO DE VÍAS PARA VEHÍCULOS ARTICULADOS TIPO A-BUS
69
Ilustración 61 Tiempo requerido para realizar maniobra en una curva circular simple con Rv entre 10.82 y 100m.
Ilustración 63 Ecuación para determinación de la velocidad máxima para un Rv utilizado entre 10.82m y 100m.
Ilustración 62 Ecuación para cálculo de UV para radios de giro RV entre 10.82m y 100m.
Ilustración 64 Deflexión máxima para diferentes valores de Dp mostradas con diferentes colores ante el cambio en Rv entre 10.82 y 100m.
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
2.0
0 5
10
15
20
25
30
35
40
45
50
55
60
65
70
75
80
85
90
95
10
0
Tie
mp
o d
e c
amb
io d
e d
ire
cció
n d
el
veh
ícu
lo (
s)
Radio de giro del vehículo Rv (m)
Tiempo de cambio de dirección vs Rv
0
5
10
15
20
25
30
35
40
45
50
55
0 5
10
15
20
25
30
35
40
45
50
55
60
65
70
75
80
85
90
95
10
0
Vm
(km
/h)
Rv (m)
Velocidad máxima para un Rv usado
2.5
3
3.5
4
4.5
5
5.5
6
6.5
7
7.5
0 5
10
15
20
25
30
35
40
45
50
55
60
65
70
75
80
85
90
95
10
0
Uv
(m)
Rv (m)
Ancho máximo de vehículo en curva
10
20
30
40
50
60
70
80
90
100
110
120
130
140
0 5
10
15
20
25
30
35
40
45
50
55
60
65
70
75
80
85
90
95
10
0
Án
gulo
de
de
fle
xió
n m
áxim
o p
or
visi
bili
dad
(g
rad
os)
Radio del eje central del vehículo en curva Rv (m)
Deflexión máxima para diferentes valores de Dp 30m
35m
40m
45m
50m
60m
70m
80m
90m
100m
ΔDVCC
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
70
7. RECOMENDACIONES
Teniendo los resultados del presente documento, se recomienda para futuros proyectos analizar
efectos adicionales para la determinación de los parámetros de diseño que no son contemplados
con el manual AASHTO PGDHS ni en los programas Vehicle Tracking o AutoCad Civil 3D
actualmente, como los cuales son aquellos efectos mecánicos y dinámicos de los vehículos.
Analizar el efecto de los amortiguadores y articulación ante una gran aceleración (o
desaceleración), además de la oscilación del vehículo en la articulación ante la interferencia de
un hueco o irregularidades en la vía en el trayecto de las llantas podría llevar a que se deban
imponer mayores requisitos a los anteriormente analizados.
Además se recomienda analizar los patrones de tráfico y operación de los vehículos articulados
en un sistema de transporte público masivo como TransMilenio y su efecto en los parámetros de
diseño geométrico, ya que esto puede llevar a que los vehículos transiten uno detrás del otro con
tiempos muy cortos que conlleven a accidentes ante el frenado de uno de estos. Asimismo se
recomienda tomar datos reales de la circulación de este tipo de vehículos para comparar con los
valores teóricos y analizar la razón de los casos en los que ha habido problemas por medio de
investigación de estos, ya que como se observó anteriormente, los vehículos A-BUS no tienen
motivos para chocar con el suelo antes de que la articulación se exceda, sin embargo se ha
sabido de casos en los que estos han chocado con este en puentes.
Finalmente se recomienda realizar cada uno de los análisis presentados para otros tipos de
vehículos, de tal forma se pueda conocer las limitaciones geométricas para el diseño de vías en
las que estos deban transitar y así evitar posibles problemáticas relacionadas con la geometría
del vehículo.
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
71
8. GLOSARIO Y ABREVIACIONES
A: Cambio de pendiente relativo entre dos tangentes en el alineamiento vertical.
También se puede utilizar para el voladizo o saliente delantero del vehículo de diseño
2.62m.
AASHTO PGDHS: Manual AASHTO A Policy on Geometric Design of Highways and
Streets
AS-C: Cambio de pendiente límite sin curva. Este valor representa el límite para el cual
cualquier cambio de pendiente A menor en el alineamiento vertical se podrá tener la
certeza de que el vehículo podrá transitar sin problemas geométricos.
C: Espacio lateral que necesita cada vehículo (lateral clearance allowance)
Dp: Distancia de visibilidad de parada.
DVCC: Distancia de visibilidad de parada crítica circular. Distancia de visibilidad
máxima que puede tener un vehículo en una curva horizontal dentro de un túnel, para un
radio de giro del vehículo R y un radio del muro con el que es tangente la línea de
visibilidad r.
Fa: Avance del voladizo delantero del vehículo sobre el carril adyacente
LCminperalte: Longitud circular mínima por el criterio de peralte de una curva horizontal
sin espiralizar.
Ld: Longitud requerida por el conductor para cambiar la dirección del vehículo de 0º al
ángulo requerido por una curva horizontal específica teniendo en cuenta tΔd. Esta se
utiliza para calcular o comprobar la longitud de desarrollo de sobreancho en una curva
circular simple.
RC: Radio del eje central de la calzada
Re: Radio de la línea externa de la calzada, que se utilizará para la longitud de
transición de peralte que se da en curva.
Ri: Radio de la línea interna de la calzada en curva.
RV: Radio de giro del eje central del vehículo
SAA: Sobreancho total de la calzada en una curva horizontal con campo de visiblidad
abierto por medio de la metodología AASHTO PGDHS.
SAAV: Sobreancho total de la calzada en una curva horizontal con campo de visiblidad
abierto utilizando Vehicle Tracking.
SAT: Sobreancho total de la calzada en una curva horizontal en túnel por medio de la
metodología AASHTO PGDHS.
SATV: Sobreancho total de la calzada en una curva horizontal en túnel utilizando
Vehicle Tracking.
td: Tiempo requerido por el conductor para cambiar la dirección del vehículo de 0º al
ángulo requerido por una curva horizontal circular específica teniendo en cuenta la tasa
TD. Esta se utiliza para calcular posteriormente la longitud de cambio de dirección ante
una velocidad de diseño.
TD: Tasa de cambio de dirección del vehículo. El vehículo para girar debe realizar el
cambio de dirección paulatinamente, la cual se asume se realiza a esta tasa constante.
En el análisis esta es de 19.05º/s.
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
72
u: Ancho normal del vehículo de diseño en tangente
U: Ancho ocupado por el vehículo de diseño en curva de radio R para el cálculo de
sobreanchos con el manual AASHTO.
UV: Ancho máximo ocupado por el vehículo en curva obtenido por medio de la
utilización del programa Vehicle Tracking.
Vm: Velocidad de maniobra. Es la velocidad máxima a la cual puede circular un
vehículo por una curva de cierto radio de giro RV de tal forma pueda seguir la
trayectoria circular sin separarse de esta.
Wc: Ancho de la calzada en curva.
Wn: Ancho de la calzada en tangente.
Z: Sobreancho adicional de seguridad. Se calcula con una fórmula empírica que
depende de la velocidad y el radio de la curva.
ΔDVCC: Ángulo de deflexión de la curva horizontal cuando se presenta la DVCC para un
radio R y r determinado.
ΔDV-MAX: Ángulo de deflexión de la curva horizontal máximo, que permite que se
cumpla el criterio de la distancia de visibilidad de parada (Dp). Para ángulos de
deflexión menores a este se cumplirá este criterio debido a la geometría.
Este ángulo se calcula únicamente en aquellas curvas en las que ΔDVCC no permite
cumplir Dp, siendo ΔDV-MAX un ángulo mejor que si cumple.
ΔPeralte: ángulo de deflexión mínimo para el criterio de peralte. Corresponde a la
deflexión de una curva con longitud circular igual a LCminperalte.
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
73
9. BIBLIOGRAFÍA
AASHTO (2004). A Policy in Geometric Design of Highways and Streets (Fifth Edition).
Washington D.C.
AASHTO (2011). A Policy in Geometric Design of Highways and Streets (Sixth Edition).
Washington D.C.
Agudelo, J. (2002). Diseño Geométrico de Vías Ajustado al Manual Colombiano. Universidad
Nacional de Colombia- Sede Medellín.
Bravo, P. (1998). Diseño de Carreteras: Técnica y Análisis del Proyecto (Edición 6). Bogotá:
Cargraphics S.A – Imprelibros.
Chocontá, P. (1998). Diseño Geométrico de Vías (Tercera Edición). Bogotá: Editorial Escuela
Colombiana de Ingeniería.
INVIAS (2008). Manual de Diseño Geométrico de Carreteras. Bogotá.
Tafur, F. (2014). Diseño de Vías: Apuntes de Clase. Universidad de los Andes, Bogotá.
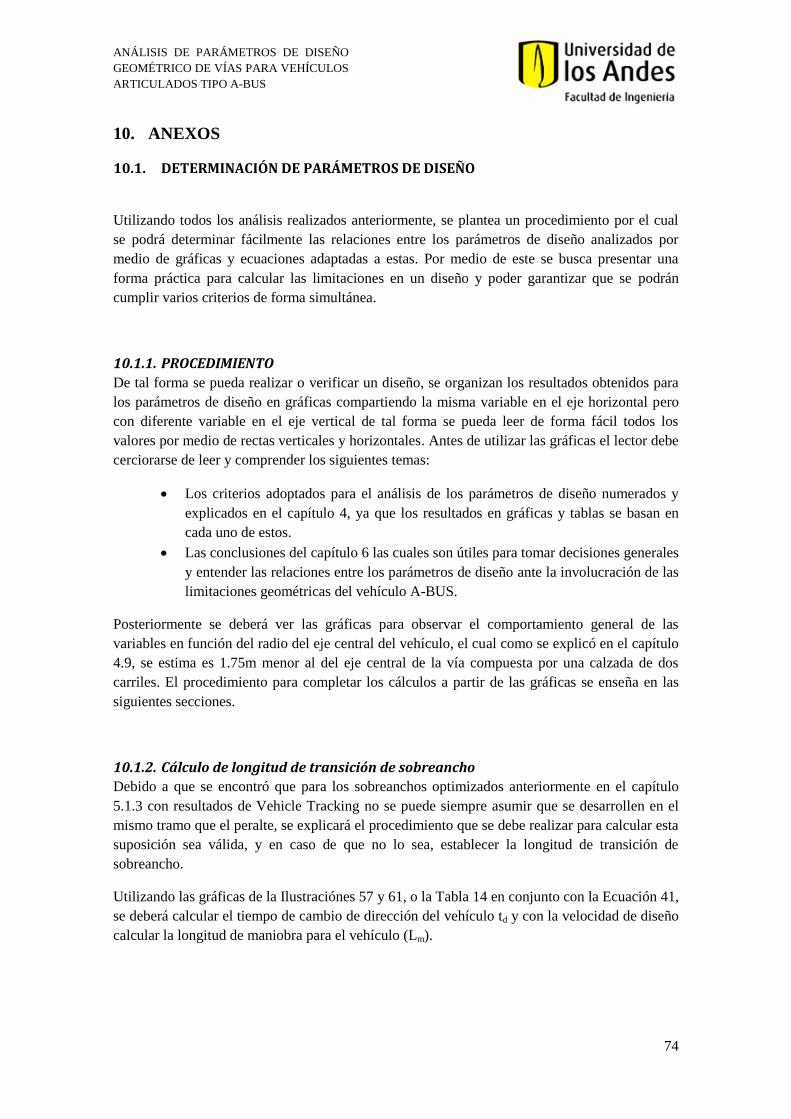
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
74
10. ANEXOS
10.1. DETERMINACIÓN DE PARÁMETROS DE DISEÑO
Utilizando todos los análisis realizados anteriormente, se plantea un procedimiento por el cual
se podrá determinar fácilmente las relaciones entre los parámetros de diseño analizados por
medio de gráficas y ecuaciones adaptadas a estas. Por medio de este se busca presentar una
forma práctica para calcular las limitaciones en un diseño y poder garantizar que se podrán
cumplir varios criterios de forma simultánea.
10.1.1. PROCEDIMIENTO
De tal forma se pueda realizar o verificar un diseño, se organizan los resultados obtenidos para
los parámetros de diseño en gráficas compartiendo la misma variable en el eje horizontal pero
con diferente variable en el eje vertical de tal forma se pueda leer de forma fácil todos los
valores por medio de rectas verticales y horizontales. Antes de utilizar las gráficas el lector debe
cerciorarse de leer y comprender los siguientes temas:
Los criterios adoptados para el análisis de los parámetros de diseño numerados y
explicados en el capítulo 4, ya que los resultados en gráficas y tablas se basan en
cada uno de estos.
Las conclusiones del capítulo 6 las cuales son útiles para tomar decisiones generales
y entender las relaciones entre los parámetros de diseño ante la involucración de las
limitaciones geométricas del vehículo A-BUS.
Posteriormente se deberá ver las gráficas para observar el comportamiento general de las
variables en función del radio del eje central del vehículo, el cual como se explicó en el capítulo
4.9, se estima es 1.75m menor al del eje central de la vía compuesta por una calzada de dos
carriles. El procedimiento para completar los cálculos a partir de las gráficas se enseña en las
siguientes secciones.
10.1.2. Cálculo de longitud de transición de sobreancho
Debido a que se encontró que para los sobreanchos optimizados anteriormente en el capítulo
5.1.3 con resultados de Vehicle Tracking no se puede siempre asumir que se desarrollen en el
mismo tramo que el peralte, se explicará el procedimiento que se debe realizar para calcular esta
suposición sea válida, y en caso de que no lo sea, establecer la longitud de transición de
sobreancho.
Utilizando las gráficas de la Ilustraciónes 57 y 61, o la Tabla 14 en conjunto con la Ecuación 41,
se deberá calcular el tiempo de cambio de dirección del vehículo td y con la velocidad de diseño
calcular la longitud de maniobra para el vehículo (Lm).
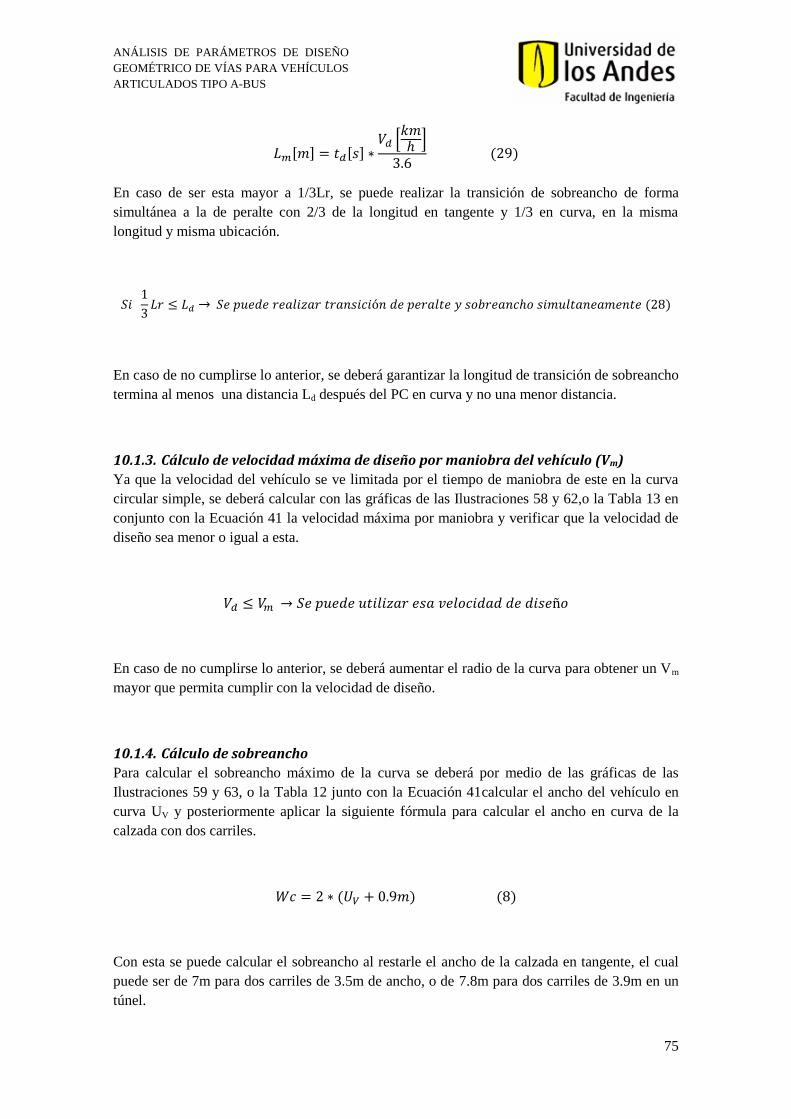
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
75
𝐿𝑚[𝑚] = 𝑡𝑑[𝑠] ∗𝑉𝑑 [
𝑘𝑚ℎ
]
3.6 (29)
En caso de ser esta mayor a 1/3Lr, se puede realizar la transición de sobreancho de forma
simultánea a la de peralte con 2/3 de la longitud en tangente y 1/3 en curva, en la misma
longitud y misma ubicación.
𝑆𝑖 1
3𝐿𝑟 ≤ 𝐿𝑑 → 𝑆𝑒 𝑝𝑢𝑒𝑑𝑒 𝑟𝑒𝑎𝑙𝑖𝑧𝑎𝑟 𝑡𝑟𝑎𝑛𝑠𝑖𝑐𝑖ó𝑛 𝑑𝑒 𝑝𝑒𝑟𝑎𝑙𝑡𝑒 𝑦 𝑠𝑜𝑏𝑟𝑒𝑎𝑛𝑐ℎ𝑜 𝑠𝑖𝑚𝑢𝑙𝑡𝑎𝑛𝑒𝑎𝑚𝑒𝑛𝑡𝑒 (28)
En caso de no cumplirse lo anterior, se deberá garantizar la longitud de transición de sobreancho
termina al menos una distancia Ld después del PC en curva y no una menor distancia.
10.1.3. Cálculo de velocidad máxima de diseño por maniobra del vehículo (Vm)
Ya que la velocidad del vehículo se ve limitada por el tiempo de maniobra de este en la curva
circular simple, se deberá calcular con las gráficas de las Ilustraciones 58 y 62,o la Tabla 13 en
conjunto con la Ecuación 41 la velocidad máxima por maniobra y verificar que la velocidad de
diseño sea menor o igual a esta.
𝑉𝑑 ≤ 𝑉𝑚 → 𝑆𝑒 𝑝𝑢𝑒𝑑𝑒 𝑢𝑡𝑖𝑙𝑖𝑧𝑎𝑟 𝑒𝑠𝑎 𝑣𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑 𝑑𝑒 𝑑𝑖𝑠𝑒ñ𝑜
En caso de no cumplirse lo anterior, se deberá aumentar el radio de la curva para obtener un Vm
mayor que permita cumplir con la velocidad de diseño.
10.1.4. Cálculo de sobreancho
Para calcular el sobreancho máximo de la curva se deberá por medio de las gráficas de las
Ilustraciones 59 y 63, o la Tabla 12 junto con la Ecuación 41calcular el ancho del vehículo en
curva UV y posteriormente aplicar la siguiente fórmula para calcular el ancho en curva de la
calzada con dos carriles.
𝑊𝑐 = 2 ∗ (𝑈𝑉 + 0.9𝑚) (8)
Con esta se puede calcular el sobreancho al restarle el ancho de la calzada en tangente, el cual
puede ser de 7m para dos carriles de 3.5m de ancho, o de 7.8m para dos carriles de 3.9m en un
túnel.
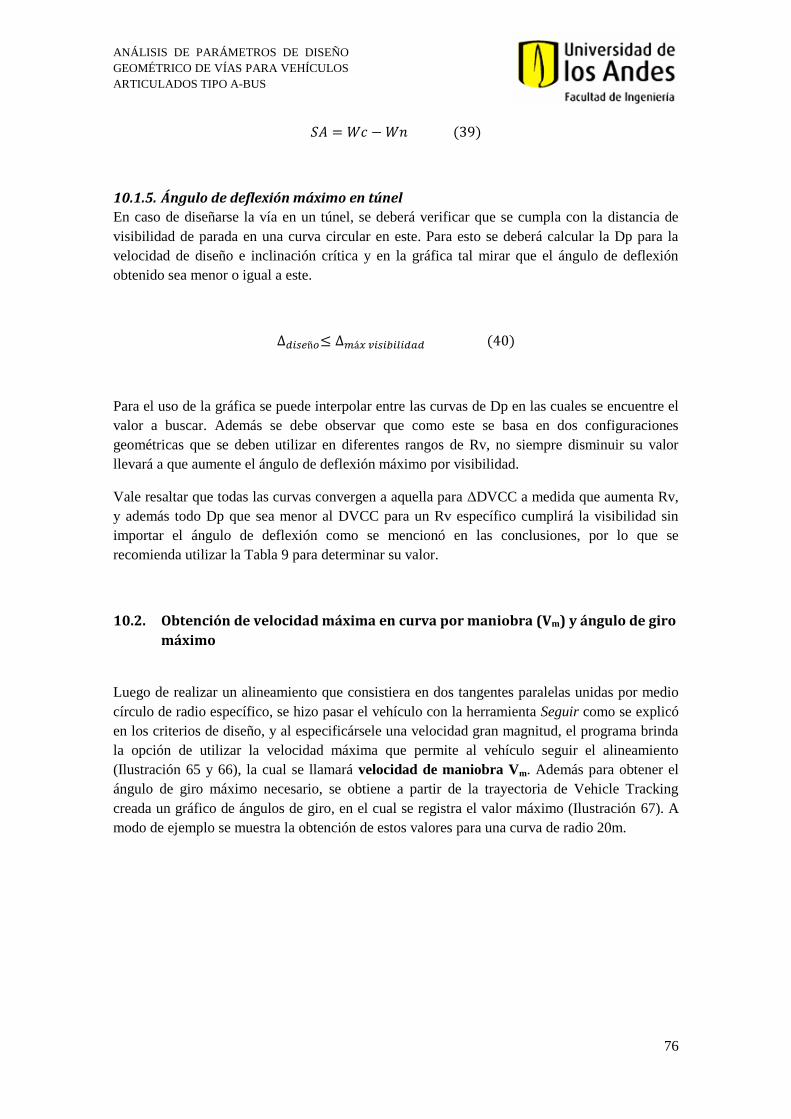
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
76
𝑆𝐴 = 𝑊𝑐 − 𝑊𝑛 (39)
10.1.5. Ángulo de deflexión máximo en túnel
En caso de diseñarse la vía en un túnel, se deberá verificar que se cumpla con la distancia de
visibilidad de parada en una curva circular en este. Para esto se deberá calcular la Dp para la
velocidad de diseño e inclinación crítica y en la gráfica tal mirar que el ángulo de deflexión
obtenido sea menor o igual a este.
∆𝑑𝑖𝑠𝑒ñ𝑜≤ ∆𝑚á𝑥 𝑣𝑖𝑠𝑖𝑏𝑖𝑙𝑖𝑑𝑎𝑑 (40)
Para el uso de la gráfica se puede interpolar entre las curvas de Dp en las cuales se encuentre el
valor a buscar. Además se debe observar que como este se basa en dos configuraciones
geométricas que se deben utilizar en diferentes rangos de Rv, no siempre disminuir su valor
llevará a que aumente el ángulo de deflexión máximo por visibilidad.
Vale resaltar que todas las curvas convergen a aquella para ΔDVCC a medida que aumenta Rv,
y además todo Dp que sea menor al DVCC para un Rv específico cumplirá la visibilidad sin
importar el ángulo de deflexión como se mencionó en las conclusiones, por lo que se
recomienda utilizar la Tabla 9 para determinar su valor.
10.2. Obtención de velocidad máxima en curva por maniobra (Vm) y ángulo de giro
máximo
Luego de realizar un alineamiento que consistiera en dos tangentes paralelas unidas por medio
círculo de radio específico, se hizo pasar el vehículo con la herramienta Seguir como se explicó
en los criterios de diseño, y al especificársele una velocidad gran magnitud, el programa brinda
la opción de utilizar la velocidad máxima que permite al vehículo seguir el alineamiento
(Ilustración 65 y 66), la cual se llamará velocidad de maniobra Vm. Además para obtener el
ángulo de giro máximo necesario, se obtiene a partir de la trayectoria de Vehicle Tracking
creada un gráfico de ángulos de giro, en el cual se registra el valor máximo (Ilustración 67). A
modo de ejemplo se muestra la obtención de estos valores para una curva de radio 20m.
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
77
Ilustración 65 Alineamiento utilizado para calcular sobreancho de una curva con radio Rv de 20m.
Ilustración 66 Utilización de la herramienta que permite calcular la velocidad máxima de diseño que permite
seguir el alineamiento
Ilustración 67 Velocidad máxima con la que se puede seguir el alineamiento para un Rv de 20m
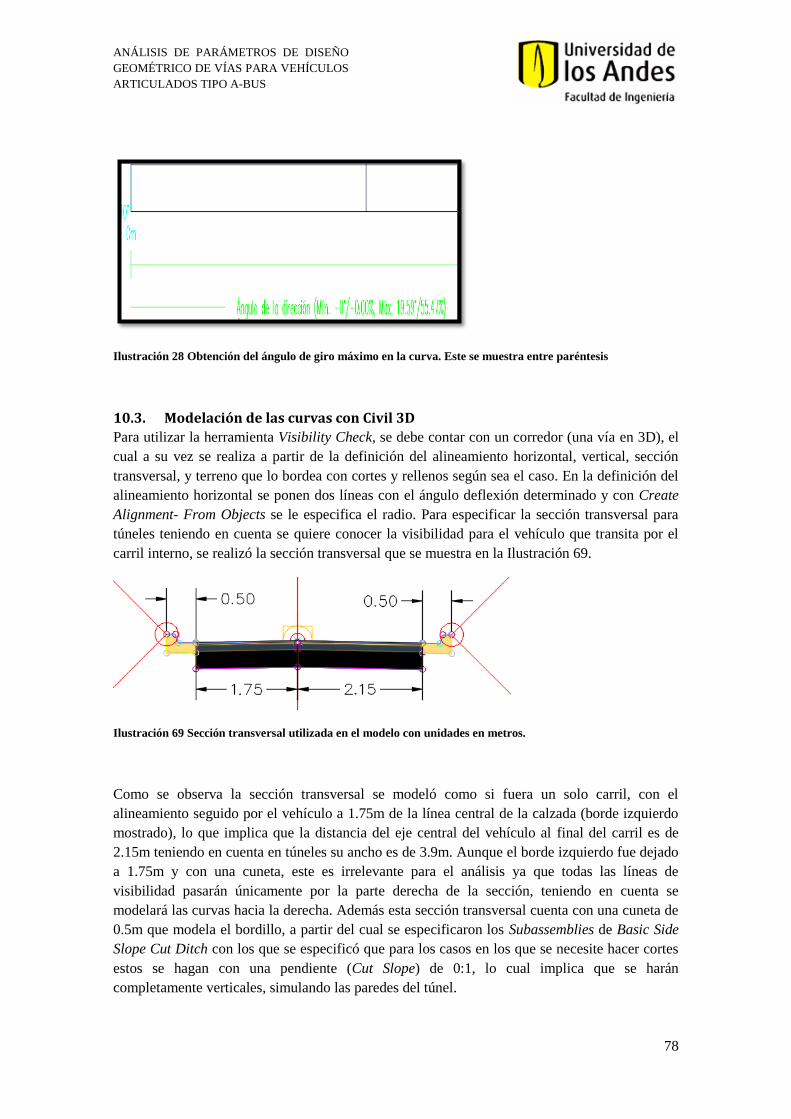
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
78
Ilustración 28 Obtención del ángulo de giro máximo en la curva. Este se muestra entre paréntesis
10.3. Modelación de las curvas con Civil 3D
Para utilizar la herramienta Visibility Check, se debe contar con un corredor (una vía en 3D), el
cual a su vez se realiza a partir de la definición del alineamiento horizontal, vertical, sección
transversal, y terreno que lo bordea con cortes y rellenos según sea el caso. En la definición del
alineamiento horizontal se ponen dos líneas con el ángulo deflexión determinado y con Create
Alignment- From Objects se le especifica el radio. Para especificar la sección transversal para
túneles teniendo en cuenta se quiere conocer la visibilidad para el vehículo que transita por el
carril interno, se realizó la sección transversal que se muestra en la Ilustración 69.
Ilustración 69 Sección transversal utilizada en el modelo con unidades en metros.
Como se observa la sección transversal se modeló como si fuera un solo carril, con el
alineamiento seguido por el vehículo a 1.75m de la línea central de la calzada (borde izquierdo
mostrado), lo que implica que la distancia del eje central del vehículo al final del carril es de
2.15m teniendo en cuenta en túneles su ancho es de 3.9m. Aunque el borde izquierdo fue dejado
a 1.75m y con una cuneta, este es irrelevante para el análisis ya que todas las líneas de
visibilidad pasarán únicamente por la parte derecha de la sección, teniendo en cuenta se
modelará las curvas hacia la derecha. Además esta sección transversal cuenta con una cuneta de
0.5m que modela el bordillo, a partir del cual se especificaron los Subassemblies de Basic Side
Slope Cut Ditch con los que se especificó que para los casos en los que se necesite hacer cortes
estos se hagan con una pendiente (Cut Slope) de 0:1, lo cual implica que se harán
completamente verticales, simulando las paredes del túnel.
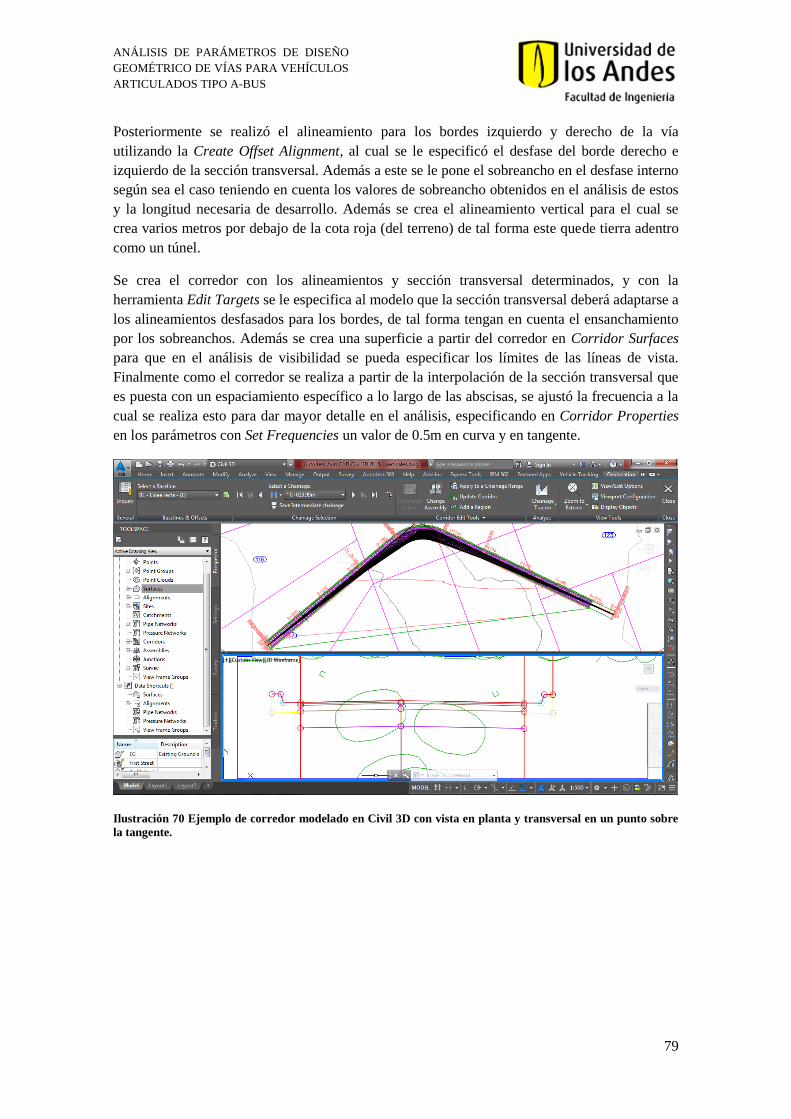
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
79
Posteriormente se realizó el alineamiento para los bordes izquierdo y derecho de la vía
utilizando la Create Offset Alignment, al cual se le especificó el desfase del borde derecho e
izquierdo de la sección transversal. Además a este se le pone el sobreancho en el desfase interno
según sea el caso teniendo en cuenta los valores de sobreancho obtenidos en el análisis de estos
y la longitud necesaria de desarrollo. Además se crea el alineamiento vertical para el cual se
crea varios metros por debajo de la cota roja (del terreno) de tal forma este quede tierra adentro
como un túnel.
Se crea el corredor con los alineamientos y sección transversal determinados, y con la
herramienta Edit Targets se le especifica al modelo que la sección transversal deberá adaptarse a
los alineamientos desfasados para los bordes, de tal forma tengan en cuenta el ensanchamiento
por los sobreanchos. Además se crea una superficie a partir del corredor en Corridor Surfaces
para que en el análisis de visibilidad se pueda especificar los límites de las líneas de vista.
Finalmente como el corredor se realiza a partir de la interpolación de la sección transversal que
es puesta con un espaciamiento específico a lo largo de las abscisas, se ajustó la frecuencia a la
cual se realiza esto para dar mayor detalle en el análisis, especificando en Corridor Properties
en los parámetros con Set Frequencies un valor de 0.5m en curva y en tangente.
Ilustración 70 Ejemplo de corredor modelado en Civil 3D con vista en planta y transversal en un punto sobre
la tangente.
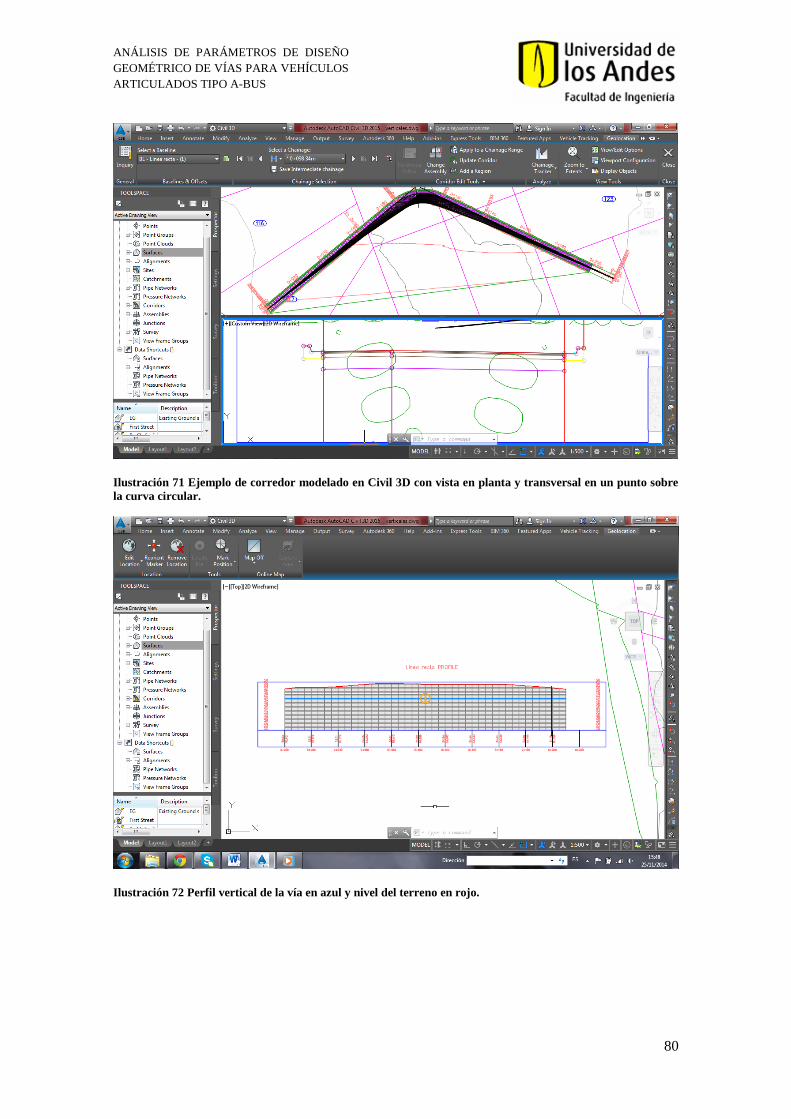
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
80
Ilustración 71 Ejemplo de corredor modelado en Civil 3D con vista en planta y transversal en un punto sobre
la curva circular.
Ilustración 72 Perfil vertical de la vía en azul y nivel del terreno en rojo.
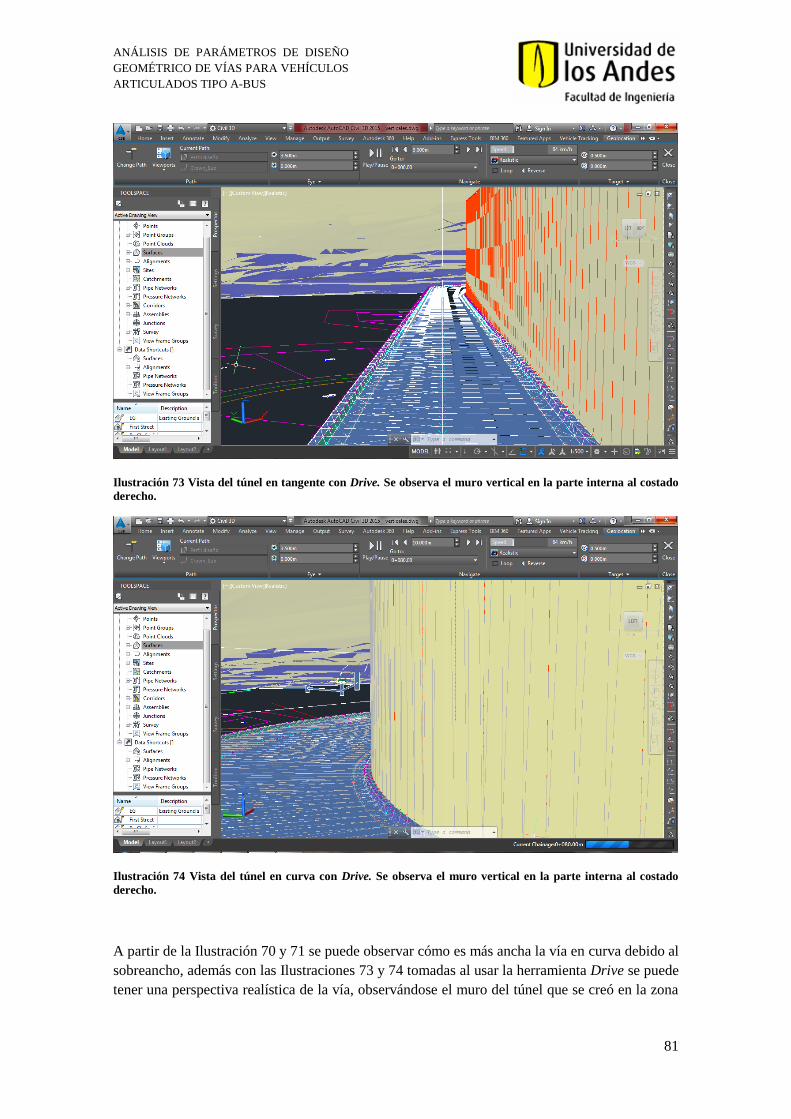
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
81
Ilustración 73 Vista del túnel en tangente con Drive. Se observa el muro vertical en la parte interna al costado
derecho.
Ilustración 74 Vista del túnel en curva con Drive. Se observa el muro vertical en la parte interna al costado
derecho.
A partir de la Ilustración 70 y 71 se puede observar cómo es más ancha la vía en curva debido al
sobreancho, además con las Ilustraciones 73 y 74 tomadas al usar la herramienta Drive se puede
tener una perspectiva realística de la vía, observándose el muro del túnel que se creó en la zona

ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
82
interna. Además en la Ilustración 72 se observa el alineamiento vertical que en este caso es
completamente recto y horizontal.
Finalmente ya con la vía modelada se puede utilizar la herramienta Visibility Check, a la cual se
le especificó utilizara los alineamientos y superficies pertinentes. Además se le introdujo que
realizar el chequeo cada 0.5m, se dejó la altura de visibilidad del conductor y de la altura del
objeto como los predeterminados, teniendo en cuenta al ser horizontal el análisis sus valores son
irrelevantes y finalmente se especificó el lugar en el cual archivar los resultados. En el modelo
se tienen las líneas de visibilidad que demuestran que el modelo se hizo adecuadamente, lo que
se ve en la Ilustración 75.
Ilustración 75 Lineas de visibilidad luego de utilizar Visibility Check.
10.4. Determinación de ecuaciones para determinación de parámetros
Para la determinación de las ecuaciones que se pueden utilizar para calcular los diferentes
parámetros de diseño en función del radio del eje central del vehículo (Rv), se adaptaron líneas
de tendencia con comportamientos pertinentes para los diferentes parámetros en diferentes
rangos de valores. El principal criterio utilizado para escoger el rango de los valores fue el
estadístico R2, el cual al tener un valor muy cercano a 1 implica que la función se adapta a los
datos con baja dispersión de los valores.
Además teniendo en cuenta que precisamente la línea de tendencia busca pasar lo más cerca de
todos los valores, esta línea pasará por encima y por debajo de diferentes valores, lo que llevará
a que al utilizarla brinde en algunos casos valores superiores o inferiores a los reales. Lo
anterior no se puede permitir acontezca para las diferentes variables, ya que en ciertos casos
estos representan un mínimo o un máximo y utilizar un valor fuera de lo permitido no
garantizará se cumpla el criterio. Para evitar esto se multiplicó cada una de las fórmulas de las
líneas de tendencia por un factor lo más cercano a 1 posible que permita garantizar los valores
obtenidos con la fórmula estén por debajo del máximo o encima del mínimo, brindando una
respuesta siempre conservadora. Cada uno de estos valores será explicado en cada uno de los
casos.
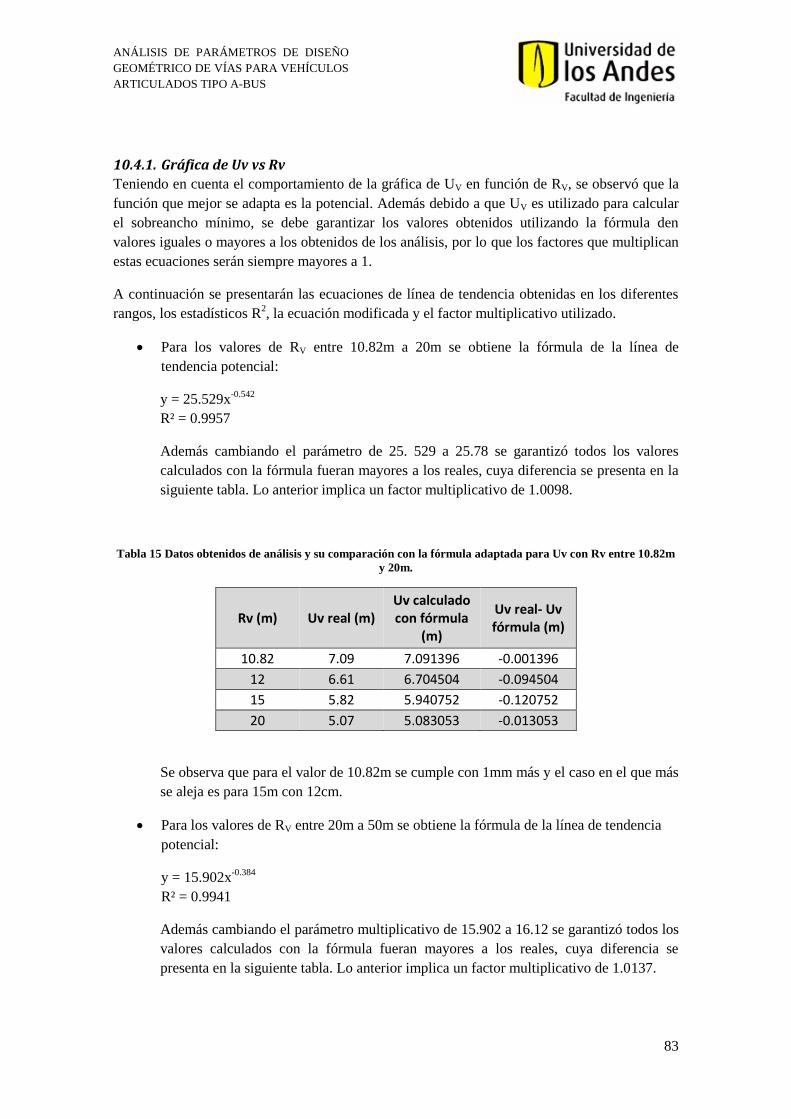
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
83
10.4.1. Gráfica de Uv vs Rv
Teniendo en cuenta el comportamiento de la gráfica de UV en función de RV, se observó que la
función que mejor se adapta es la potencial. Además debido a que UV es utilizado para calcular
el sobreancho mínimo, se debe garantizar los valores obtenidos utilizando la fórmula den
valores iguales o mayores a los obtenidos de los análisis, por lo que los factores que multiplican
estas ecuaciones serán siempre mayores a 1.
A continuación se presentarán las ecuaciones de línea de tendencia obtenidas en los diferentes
rangos, los estadísticos R2, la ecuación modificada y el factor multiplicativo utilizado.
Para los valores de RV entre 10.82m a 20m se obtiene la fórmula de la línea de
tendencia potencial:
y = 25.529x-0.542
R² = 0.9957
Además cambiando el parámetro de 25. 529 a 25.78 se garantizó todos los valores
calculados con la fórmula fueran mayores a los reales, cuya diferencia se presenta en la
siguiente tabla. Lo anterior implica un factor multiplicativo de 1.0098.
Tabla 15 Datos obtenidos de análisis y su comparación con la fórmula adaptada para Uv con Rv entre 10.82m
y 20m.
Rv (m) Uv real (m) Uv calculado con fórmula
(m)
Uv real- Uv fórmula (m)
10.82 7.09 7.091396 -0.001396
12 6.61 6.704504 -0.094504
15 5.82 5.940752 -0.120752
20 5.07 5.083053 -0.013053
Se observa que para el valor de 10.82m se cumple con 1mm más y el caso en el que más
se aleja es para 15m con 12cm.
Para los valores de RV entre 20m a 50m se obtiene la fórmula de la línea de tendencia
potencial:
y = 15.902x-0.384
R² = 0.9941
Además cambiando el parámetro multiplicativo de 15.902 a 16.12 se garantizó todos los
valores calculados con la fórmula fueran mayores a los reales, cuya diferencia se
presenta en la siguiente tabla. Lo anterior implica un factor multiplicativo de 1.0137.
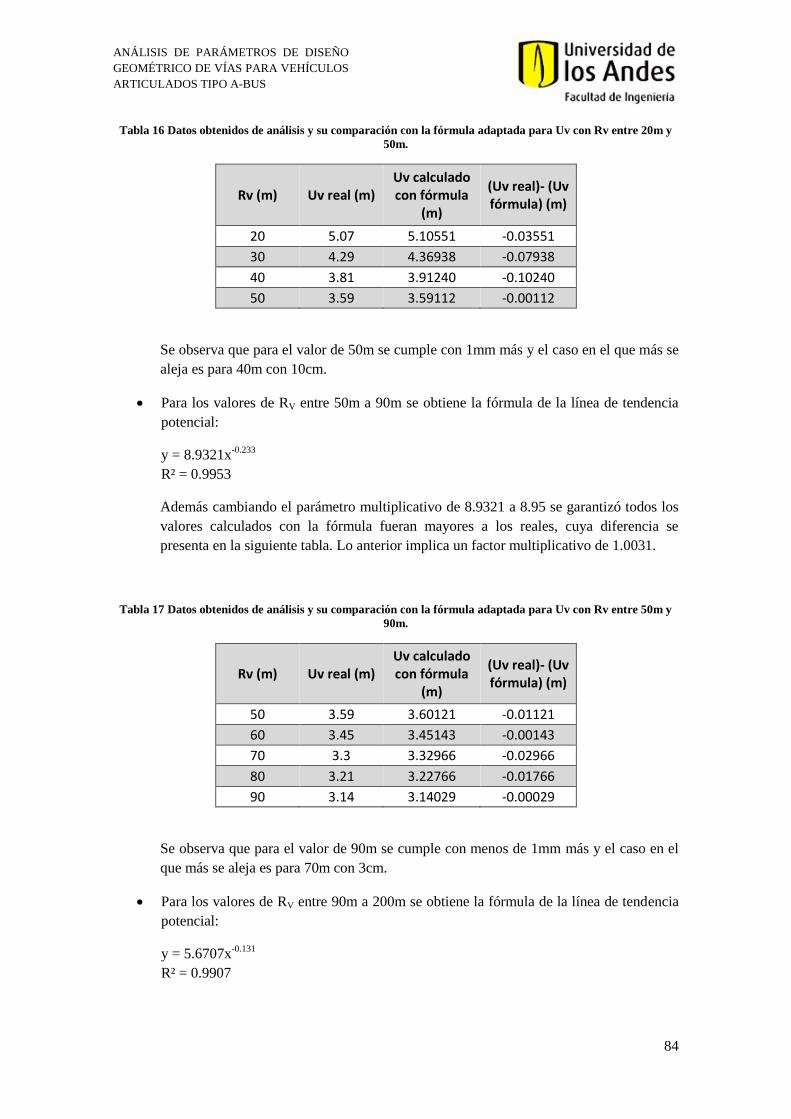
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
84
Tabla 16 Datos obtenidos de análisis y su comparación con la fórmula adaptada para Uv con Rv entre 20m y
50m.
Rv (m) Uv real (m) Uv calculado con fórmula
(m)
(Uv real)- (Uv fórmula) (m)
20 5.07 5.10551 -0.03551
30 4.29 4.36938 -0.07938
40 3.81 3.91240 -0.10240
50 3.59 3.59112 -0.00112
Se observa que para el valor de 50m se cumple con 1mm más y el caso en el que más se
aleja es para 40m con 10cm.
Para los valores de RV entre 50m a 90m se obtiene la fórmula de la línea de tendencia
potencial:
y = 8.9321x-0.233
R² = 0.9953
Además cambiando el parámetro multiplicativo de 8.9321 a 8.95 se garantizó todos los
valores calculados con la fórmula fueran mayores a los reales, cuya diferencia se
presenta en la siguiente tabla. Lo anterior implica un factor multiplicativo de 1.0031.
Tabla 17 Datos obtenidos de análisis y su comparación con la fórmula adaptada para Uv con Rv entre 50m y
90m.
Rv (m) Uv real (m) Uv calculado con fórmula
(m)
(Uv real)- (Uv fórmula) (m)
50 3.59 3.60121 -0.01121
60 3.45 3.45143 -0.00143
70 3.3 3.32966 -0.02966
80 3.21 3.22766 -0.01766
90 3.14 3.14029 -0.00029
Se observa que para el valor de 90m se cumple con menos de 1mm más y el caso en el
que más se aleja es para 70m con 3cm.
Para los valores de RV entre 90m a 200m se obtiene la fórmula de la línea de tendencia
potencial:
y = 5.6707x-0.131
R² = 0.9907
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
85
Además cambiando el parámetro multiplicativo de 5.6707 a 5.69 se garantizó todos los
valores calculados con la fórmula fueran mayores a los reales, cuya diferencia se
presenta en la siguiente tabla. Lo anterior implica un factor multiplicativo de 1.0034.
Tabla 18 Datos obtenidos de análisis y su comparación con la fórmula adaptada para Uv con Rv entre 90m y
200m.
Rv (m) Uv real (m) Uv calculado con fórmula
(m)
(Uv real)- (Uv fórmula) (m)
90 3.14 3.15578 -0.01578
100 3.11 3.11252 -0.00252
150 2.92 2.95151 -0.03151
200 2.84 2.84235 -0.00235
Se observa que para el valor de 200m se cumple con 2mm más y el caso en el que más
se aleja es para 150m con 32mm.
Para los valores de RV entre 200m a 1000m se obtiene la fórmula de la línea de
tendencia potencial:
y = 3.6486x-0.048
R² = 0.9701
Además cambiando el parámetro multiplicativo de 3.6486 a 3.67 se garantizó todos los
valores calculados con la fórmula fueran mayores a los reales, cuya diferencia se
presenta en la siguiente tabla. Lo anterior implica un factor multiplicativo de 1.0059.
Tabla 19 Datos obtenidos de análisis y su comparación con la fórmula adaptada para Uv con Rv entre 200m y
1000m.
Rv (m) Uv real (m) Uv calculado con fórmula
(m)
(Uv real)- (Uv fórmula) (m)
200 2.84 2.84588 -0.00588
300 2.75 2.79103 -0.04103
500 2.69 2.72343 -0.03343
1000 2.62 2.63431 -0.01431
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
86
Se observa que para el valor de 1000m se cumple con 14mm más y el caso en el que
más se aleja es para 300m con 41mm.
10.4.2. Gráfica de Vm vs Rv
Para determinar las fórmulas que representen cercanamente el comportamiento de la velocidad
máxima para que el vehículo pueda transitar por una curva de cierto radio Rv, se segmentaron
los resultados y se adaptaron curvas, al ser estas las que mejor se adaptaban visualmente y
presentaban un R2 más cercano a 1en cada rango. Finalmente se adaptó un factor para dividir la
fórmula de tal forma se garantice esta siempre brinda velocidades máximas menores a las
calculadas, pero lo más cercanas a estas posible para aquellas curvas potenciales.
A continuación se presentarán las ecuaciones de línea de tendencia obtenidas en los diferentes
rangos, los estadísticos R2, la ecuación modificada y el factor de división utilizado.
Para los valores de RV entre 10.82m a 30m se obtiene la fórmula de la línea de
tendencia potencial:
y = 1.4044x0.9551
R² = 0.9987
Además cambiando el parámetro multiplicativo de 1.4044 a 1.384 se garantizó todos los
valores calculados con la fórmula fueran menores a los reales, cuya diferencia se
presenta en la siguiente tabla. Lo anterior implica un factor de división de 1.0147.
Tabla 20 Datos obtenidos de análisis y su comparación con la fórmula adaptada para Vm con Rv entre 10.82m
y 30m.
Rv (m) Vm real (km/h)
Vm calculado con fórmula
(km/h)
(Vm real)- (Vm fórmula)
(km/h)
10.82 13.51 13.45633 0.05367
12 15.05 14.85464 0.19536
15 18.74 18.38319 0.35681
20 25.09 24.19635 0.89365
30 35.64 35.63975 0.00025
Se observa que para el valor de 30m se cumple con 0.00025km/h menos y el caso en el
que más se aleja es para 20m por 0.89km/h.
Para los valores de RV entre 30m a 80m se obtiene la fórmula de la línea de tendencia
potencial:
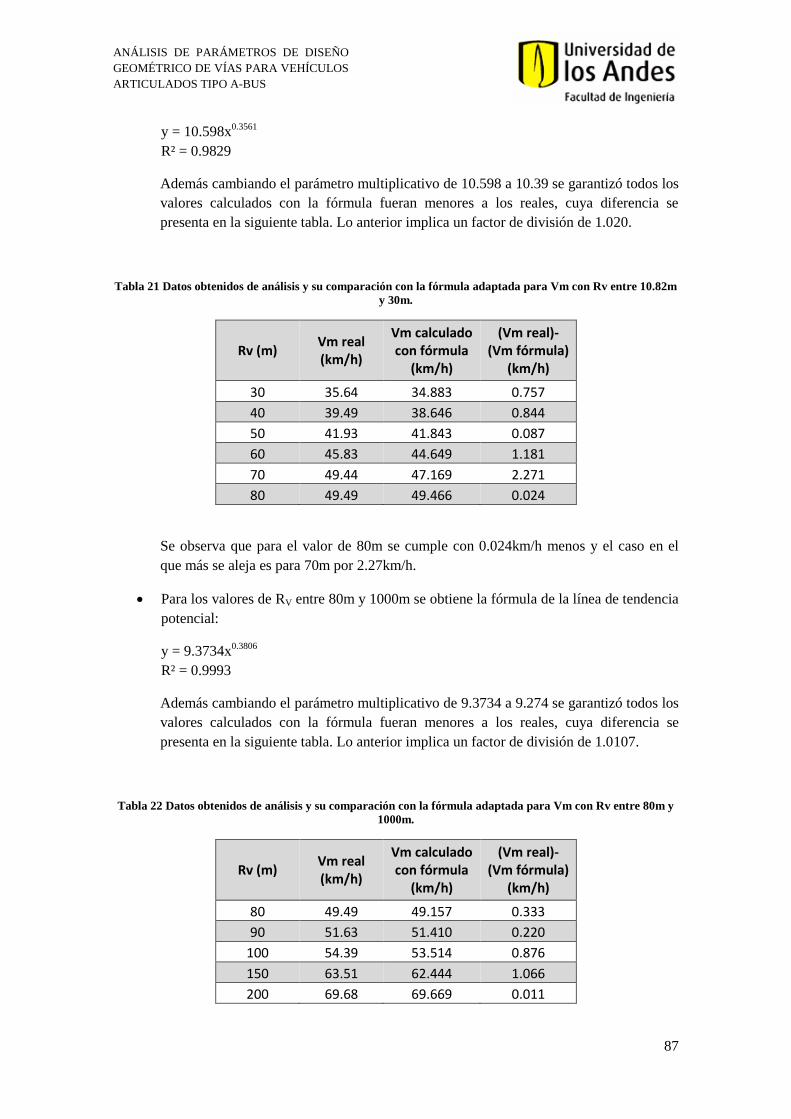
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
87
y = 10.598x0.3561
R² = 0.9829
Además cambiando el parámetro multiplicativo de 10.598 a 10.39 se garantizó todos los
valores calculados con la fórmula fueran menores a los reales, cuya diferencia se
presenta en la siguiente tabla. Lo anterior implica un factor de división de 1.020.
Tabla 21 Datos obtenidos de análisis y su comparación con la fórmula adaptada para Vm con Rv entre 10.82m
y 30m.
Rv (m) Vm real (km/h)
Vm calculado con fórmula
(km/h)
(Vm real)- (Vm fórmula)
(km/h)
30 35.64 34.883 0.757
40 39.49 38.646 0.844
50 41.93 41.843 0.087
60 45.83 44.649 1.181
70 49.44 47.169 2.271
80 49.49 49.466 0.024
Se observa que para el valor de 80m se cumple con 0.024km/h menos y el caso en el
que más se aleja es para 70m por 2.27km/h.
Para los valores de RV entre 80m y 1000m se obtiene la fórmula de la línea de tendencia
potencial:
y = 9.3734x0.3806
R² = 0.9993
Además cambiando el parámetro multiplicativo de 9.3734 a 9.274 se garantizó todos los
valores calculados con la fórmula fueran menores a los reales, cuya diferencia se
presenta en la siguiente tabla. Lo anterior implica un factor de división de 1.0107.
Tabla 22 Datos obtenidos de análisis y su comparación con la fórmula adaptada para Vm con Rv entre 80m y
1000m.
Rv (m) Vm real (km/h)
Vm calculado con fórmula
(km/h)
(Vm real)- (Vm fórmula)
(km/h)
80 49.49 49.157 0.333
90 51.63 51.410 0.220
100 54.39 53.514 0.876
150 63.51 62.444 1.066
200 69.68 69.669 0.011
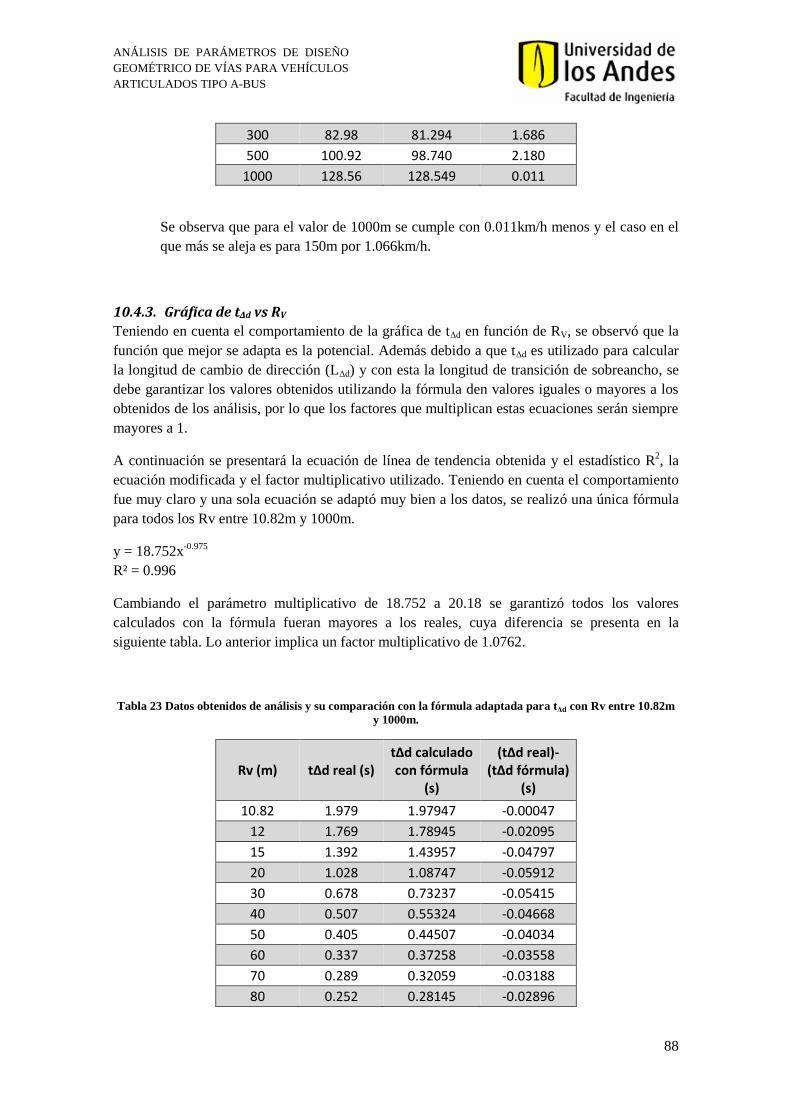
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
88
300 82.98 81.294 1.686
500 100.92 98.740 2.180
1000 128.56 128.549 0.011
Se observa que para el valor de 1000m se cumple con 0.011km/h menos y el caso en el
que más se aleja es para 150m por 1.066km/h.
10.4.3. Gráfica de tΔd vs RV
Teniendo en cuenta el comportamiento de la gráfica de tΔd en función de RV, se observó que la
función que mejor se adapta es la potencial. Además debido a que tΔd es utilizado para calcular
la longitud de cambio de dirección (LΔd) y con esta la longitud de transición de sobreancho, se
debe garantizar los valores obtenidos utilizando la fórmula den valores iguales o mayores a los
obtenidos de los análisis, por lo que los factores que multiplican estas ecuaciones serán siempre
mayores a 1.
A continuación se presentará la ecuación de línea de tendencia obtenida y el estadístico R2, la
ecuación modificada y el factor multiplicativo utilizado. Teniendo en cuenta el comportamiento
fue muy claro y una sola ecuación se adaptó muy bien a los datos, se realizó una única fórmula
para todos los Rv entre 10.82m y 1000m.
y = 18.752x-0.975
R² = 0.996
Cambiando el parámetro multiplicativo de 18.752 a 20.18 se garantizó todos los valores
calculados con la fórmula fueran mayores a los reales, cuya diferencia se presenta en la
siguiente tabla. Lo anterior implica un factor multiplicativo de 1.0762.
Tabla 23 Datos obtenidos de análisis y su comparación con la fórmula adaptada para tΔd con Rv entre 10.82m
y 1000m.
Rv (m) tΔd real (s) tΔd calculado con fórmula
(s)
(tΔd real)- (tΔd fórmula)
(s)
10.82 1.979 1.97947 -0.00047
12 1.769 1.78945 -0.02095
15 1.392 1.43957 -0.04797
20 1.028 1.08747 -0.05912
30 0.678 0.73237 -0.05415
40 0.507 0.55324 -0.04668
50 0.405 0.44507 -0.04034
60 0.337 0.37258 -0.03558
70 0.289 0.32059 -0.03188
80 0.252 0.28145 -0.02896

ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
89
90 0.224 0.25092 -0.02677
100 0.202 0.22642 -0.02485
150 0.134 0.15249 -0.01810
200 0.101 0.11519 -0.01440
300 0.067 0.07758 -0.01038
500 0.040 0.04714 -0.00672
1000 0.029 0.02398 0.00489
Se observa que para el valor de 10.82m se cumple con 0.00047s más y aunque se tiene
un valor menor del calculado para el Rv de 1000m, este no brinda preocupaciones ya
que para este tipo de curvas es seguro que el vehículo no requerirá sobreancho y permite
en cambio que la ecuación se adapte mejor a los datos realmente prácticos.
10.5. Procedimiento de Cálculo de Sobreanchos
10.5.1. Cálculo de sobreancho con norma AASHTO PGDHS
A continuación se mostrara como calcular los sobreanchos utilizando las ecuaciones de
AASHTO PGDHS, siguiéndose los pasos que se mostrarán a continuación.
1. Primero se calcula el ancho ocupado por el vehículo de diseño en curva (U),
utilizando la fórmula 3-33 de AASHTO PGDHS (AASHTO, 2004).
𝑈 = 𝑢 + 𝑅 − √𝑅2 − ∑ 𝐿𝑖2 (42)
Siendo:
U: el ancho del vehículo en curva en metros.
u: ancho del vehículo en tangente en metros.
R: radio de la curva en metros.
Li: Chasis del vehículo de diseño entre ejes consecutivos y puntos de
articulación en metros.
Se utilizó un ancho normal del vehículo en tangente (u) de 2.59m como se ve en
la Ilustración 1. Además la sumatoria se calculó como:
∑ 𝐿𝑖2 = 2.622 + 6.712 + 1.892 + 4.022 + 3.052 = 80.9235𝑚2
Siendo finalmente:
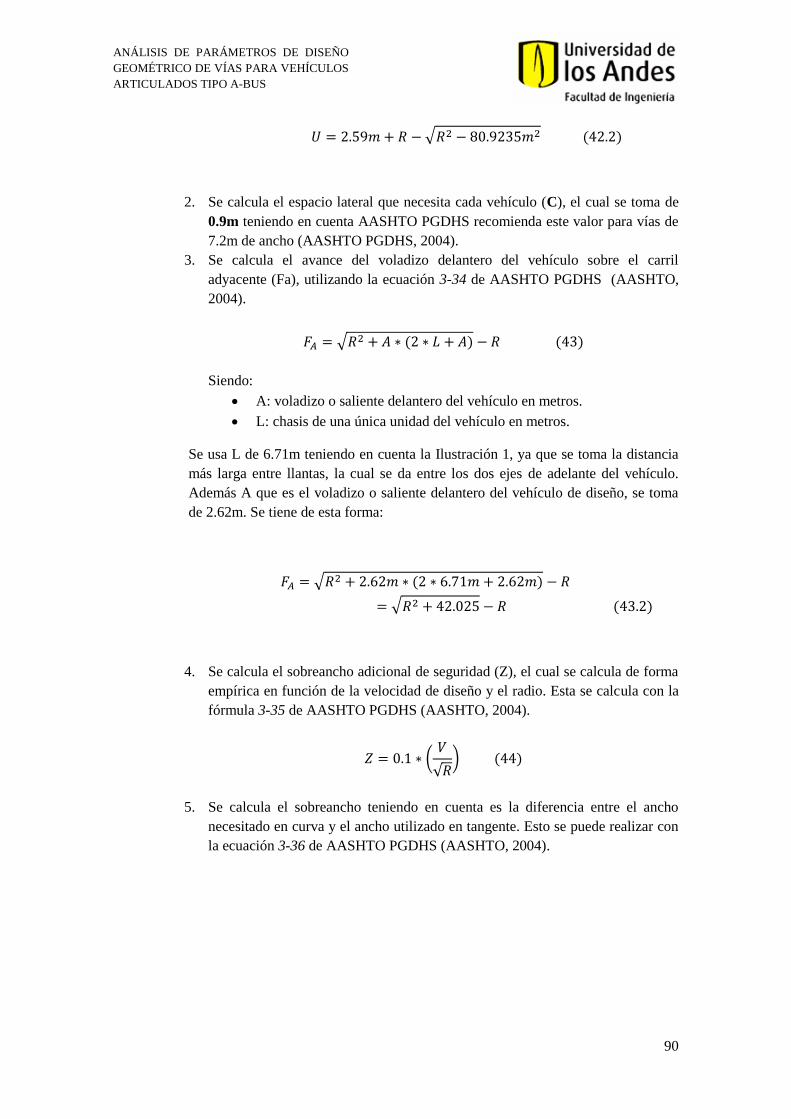
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
90
𝑈 = 2.59𝑚 + 𝑅 − √𝑅2 − 80.9235𝑚2 (42.2)
2. Se calcula el espacio lateral que necesita cada vehículo (C), el cual se toma de
0.9m teniendo en cuenta AASHTO PGDHS recomienda este valor para vías de
7.2m de ancho (AASHTO PGDHS, 2004).
3. Se calcula el avance del voladizo delantero del vehículo sobre el carril
adyacente (Fa), utilizando la ecuación 3-34 de AASHTO PGDHS (AASHTO,
2004).
𝐹𝐴 = √𝑅2 + 𝐴 ∗ (2 ∗ 𝐿 + 𝐴) − 𝑅 (43)
Siendo:
A: voladizo o saliente delantero del vehículo en metros.
L: chasis de una única unidad del vehículo en metros.
Se usa L de 6.71m teniendo en cuenta la Ilustración 1, ya que se toma la distancia
más larga entre llantas, la cual se da entre los dos ejes de adelante del vehículo.
Además A que es el voladizo o saliente delantero del vehículo de diseño, se toma
de 2.62m. Se tiene de esta forma:
𝐹𝐴 = √𝑅2 + 2.62𝑚 ∗ (2 ∗ 6.71𝑚 + 2.62𝑚) − 𝑅
= √𝑅2 + 42.025 − 𝑅 (43.2)
4. Se calcula el sobreancho adicional de seguridad (Z), el cual se calcula de forma
empírica en función de la velocidad de diseño y el radio. Esta se calcula con la
fórmula 3-35 de AASHTO PGDHS (AASHTO, 2004).
𝑍 = 0.1 ∗ (𝑉
√𝑅) (44)
5. Se calcula el sobreancho teniendo en cuenta es la diferencia entre el ancho
necesitado en curva y el ancho utilizado en tangente. Esto se puede realizar con
la ecuación 3-36 de AASHTO PGDHS (AASHTO, 2004).
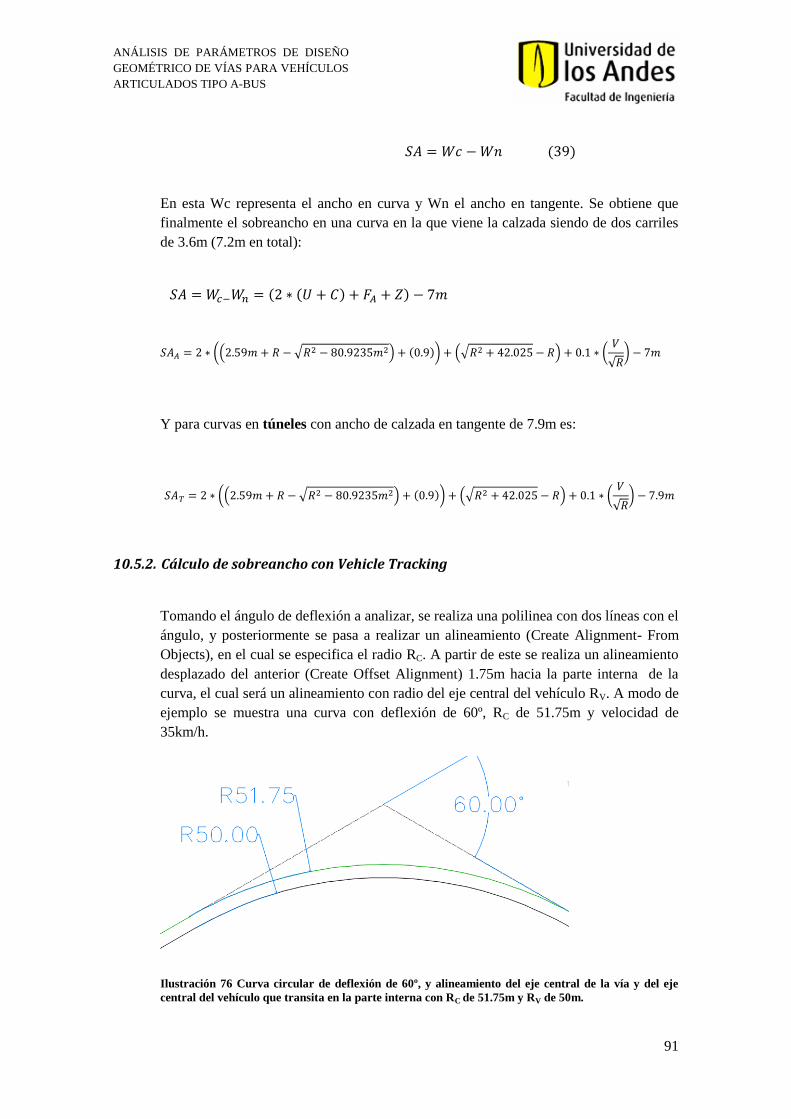
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
91
𝑆𝐴 = 𝑊𝑐 − 𝑊𝑛 (39)
En esta Wc representa el ancho en curva y Wn el ancho en tangente. Se obtiene que
finalmente el sobreancho en una curva en la que viene la calzada siendo de dos carriles
de 3.6m (7.2m en total):
𝑆𝐴 = 𝑊𝑐−𝑊𝑛 = (2 ∗ (𝑈 + 𝐶) + 𝐹𝐴 + 𝑍) − 7𝑚
𝑆𝐴𝐴 = 2 ∗ ((2.59𝑚 + 𝑅 − √𝑅2 − 80.9235𝑚2) + (0.9)) + (√𝑅2 + 42.025 − 𝑅) + 0.1 ∗ (𝑉
√𝑅) − 7𝑚
Y para curvas en túneles con ancho de calzada en tangente de 7.9m es:
𝑆𝐴𝑇 = 2 ∗ ((2.59𝑚 + 𝑅 − √𝑅2 − 80.9235𝑚2) + (0.9)) + (√𝑅2 + 42.025 − 𝑅) + 0.1 ∗ (𝑉
√𝑅) − 7.9𝑚
10.5.2. Cálculo de sobreancho con Vehicle Tracking
Tomando el ángulo de deflexión a analizar, se realiza una polilinea con dos líneas con el
ángulo, y posteriormente se pasa a realizar un alineamiento (Create Alignment- From
Objects), en el cual se especifica el radio RC. A partir de este se realiza un alineamiento
desplazado del anterior (Create Offset Alignment) 1.75m hacia la parte interna de la
curva, el cual será un alineamiento con radio del eje central del vehículo RV. A modo de
ejemplo se muestra una curva con deflexión de 60º, RC de 51.75m y velocidad de
35km/h.
Ilustración 76 Curva circular de deflexión de 60º, y alineamiento del eje central de la vía y del eje
central del vehículo que transita en la parte interna con RC de 51.75m y RV de 50m.
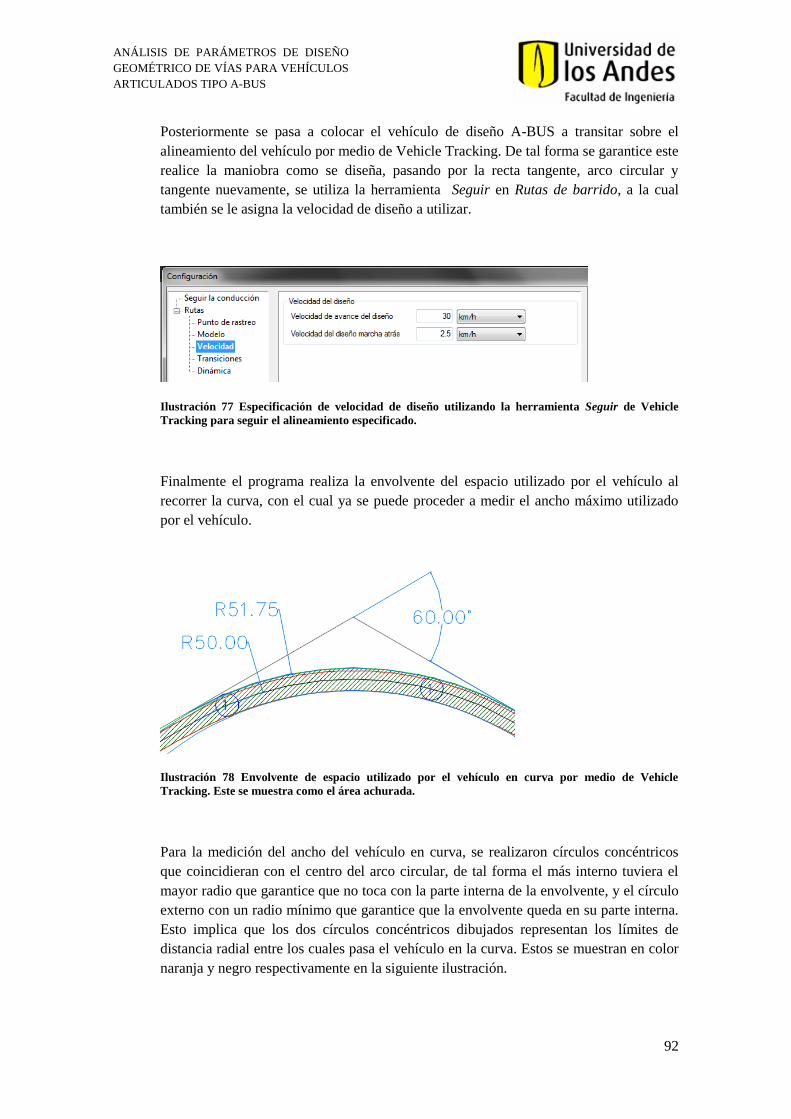
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
92
Posteriormente se pasa a colocar el vehículo de diseño A-BUS a transitar sobre el
alineamiento del vehículo por medio de Vehicle Tracking. De tal forma se garantice este
realice la maniobra como se diseña, pasando por la recta tangente, arco circular y
tangente nuevamente, se utiliza la herramienta Seguir en Rutas de barrido, a la cual
también se le asigna la velocidad de diseño a utilizar.
Ilustración 77 Especificación de velocidad de diseño utilizando la herramienta Seguir de Vehicle
Tracking para seguir el alineamiento especificado.
Finalmente el programa realiza la envolvente del espacio utilizado por el vehículo al
recorrer la curva, con el cual ya se puede proceder a medir el ancho máximo utilizado
por el vehículo.
Ilustración 78 Envolvente de espacio utilizado por el vehículo en curva por medio de Vehicle
Tracking. Este se muestra como el área achurada.
Para la medición del ancho del vehículo en curva, se realizaron círculos concéntricos
que coincidieran con el centro del arco circular, de tal forma el más interno tuviera el
mayor radio que garantice que no toca con la parte interna de la envolvente, y el círculo
externo con un radio mínimo que garantice que la envolvente queda en su parte interna.
Esto implica que los dos círculos concéntricos dibujados representan los límites de
distancia radial entre los cuales pasa el vehículo en la curva. Estos se muestran en color
naranja y negro respectivamente en la siguiente ilustración.
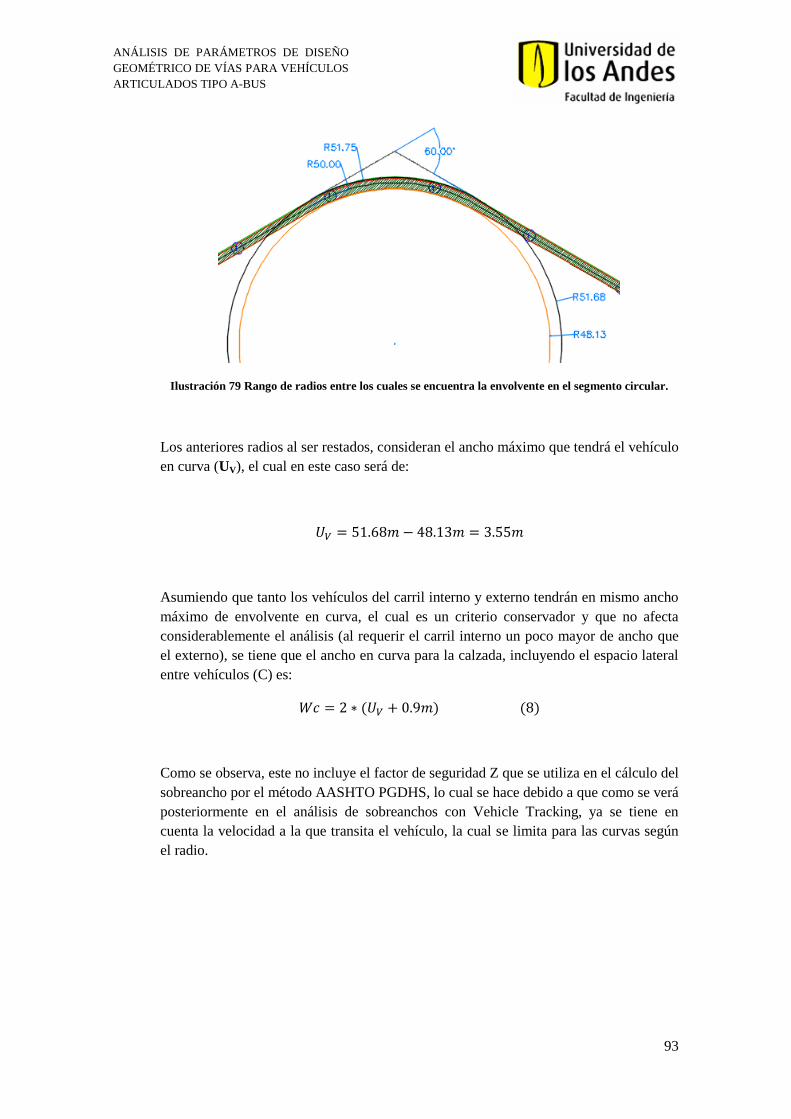
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
93
Ilustración 79 Rango de radios entre los cuales se encuentra la envolvente en el segmento circular.
Los anteriores radios al ser restados, consideran el ancho máximo que tendrá el vehículo
en curva (UV), el cual en este caso será de:
𝑈𝑉 = 51.68𝑚 − 48.13𝑚 = 3.55𝑚
Asumiendo que tanto los vehículos del carril interno y externo tendrán en mismo ancho
máximo de envolvente en curva, el cual es un criterio conservador y que no afecta
considerablemente el análisis (al requerir el carril interno un poco mayor de ancho que
el externo), se tiene que el ancho en curva para la calzada, incluyendo el espacio lateral
entre vehículos (C) es:
𝑊𝑐 = 2 ∗ (𝑈𝑉 + 0.9𝑚) (8)
Como se observa, este no incluye el factor de seguridad Z que se utiliza en el cálculo del
sobreancho por el método AASHTO PGDHS, lo cual se hace debido a que como se verá
posteriormente en el análisis de sobreanchos con Vehicle Tracking, ya se tiene en
cuenta la velocidad a la que transita el vehículo, la cual se limita para las curvas según
el radio.
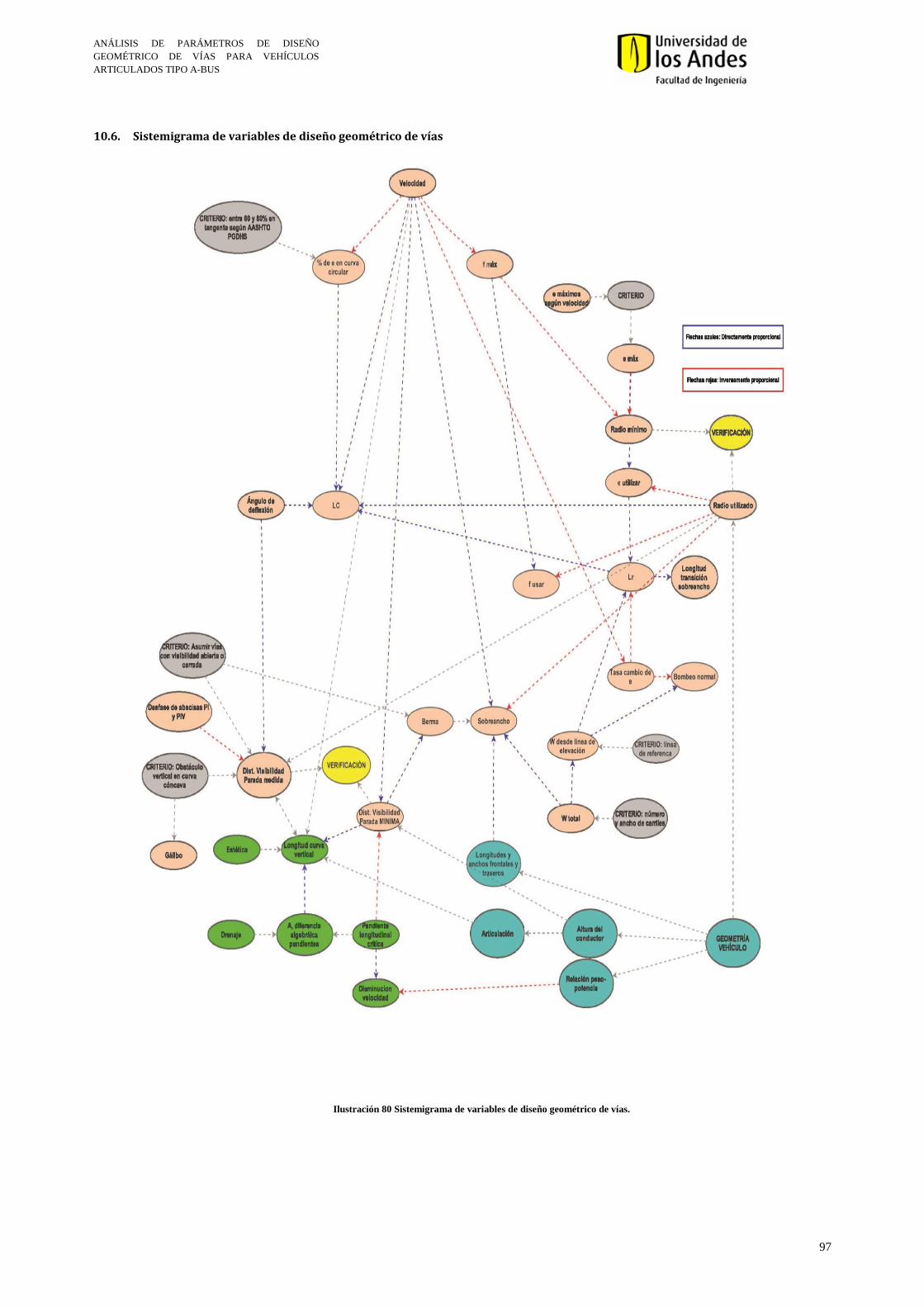
ANÁLISIS DE PARÁMETROS DE DISEÑO
GEOMÉTRICO DE VÍAS PARA VEHÍCULOS
ARTICULADOS TIPO A-BUS
97
10.6. Sistemigrama de variables de diseño geométrico de vías
Ilustración 80 Sistemigrama de variables de diseño geométrico de vías.