Documento Final de Anteproyecto
15
Click here to load reader
-
Upload
diego-bello -
Category
Documents
-
view
133 -
download
4
Transcript of Documento Final de Anteproyecto

PROPUESTA DE ANTEPROYECTO
Glosario:
Control difuso: “La lógica difusa es una técnica de la inteligencia computacional que permite trabajar información con alto grado de imprecisión, en esto se diferencia de la lógica convencional que trabaja con información bien definida y precisa”1.
Neumática: “Es una fuente de energía de fácil obtención y tratamiento para el control de máquinas”2.
Visión de máquina: “Estas máquinas incorporan la clasificación de objetos automáticamente, usando cámaras electrónicas y computadores con software específico. Tiene la capacidad de inspeccionar tamaño, color, forma, perfil y detalles específicos del objeto ”3.
Manifolds:” Es el cuerpo de una o varias válvulas y al mismo tiempo es la tubería de conexión entre ellas, optimizando las pérdidas de carga y el espacio requerido”4.
1 .TEMA: Control difuso.
2. TITULO
Construcción de una plataforma de levitación neumática, implementando técnicas de control difuso.
PLANTEAMIENTO DE LA NECESIDAD
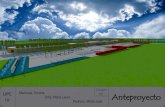
Se pretende construir una plataforma de levitación neumática en la cual se distribuirá el recurso de fluido de aire, para mantenerlo constante en las diferentes zonas de la planta. La plataforma de levitación neumática estará compuesta por tres tubos de acrílico cada uno en posición vertical, los cuales se conectan a un manifolds en cada uno de los costados (superior e inferior).En el costado inferior cada uno de estos tubos cuenta con un ventilador el cual es el encargado de inyectarle aire al tubo .Dentro de cada uno de los tubos se suspende una bola de ping-pong la cual va a ser impulsada por este flujo de aire con el objetivo de
1 Logica Difusa [ON-LINE]. Disponible en: http://members.tripod.com/jesus_alfonso_lopez/FuzzyIntro.html . (2010/10/15).2 Neumatica [ON_LINE]. Disponible en: http://www.euskalnet.net/j.m.f.b./neumatica.htm (2010/10/15)3Visión de maquina [ON-LINE].disponible en: http://www.oraka.co.nz/mvisn_sp.htm (2010/10/15).4 Manifols [ON-LINE].disponible en: http://www.oocities.com/ebingenieria/webeb/manifold/3.htm (2010/10/15).

mantenerlas a una altura máxima uniforme posible. Para esto se utilizará una cámara que detecte la altura de las pelotas usando visión de máquina, para luego procesar estos datos mediante el PC. En la fig1 se muestra el diseñó de la planta que se diseñó en la universidad de Ohio.
FIG. 1
En ambientes educativos surge la necesidad de una plataforma de experimentación que sea útil tanto para los estudiantes como para los profesores y que permita la investigación de estrategias versátiles de control.
JUSTIFICACIÓN
La idea de una plataforma de levitación neumática surge por la inquietud personal de estudiar una estrategia de control en particular, que permita tener un aprovechamiento correcto del recurso del aire.
Tomando como base el proyecto realizado en la Universidad de Ohio “The-balls-in-tubes que corresponde a un experimento de bajo costo con el cual se pretendió probar diferentes técnicas de Dynamic Resource Allocation,

emulando diferentes problemáticas tales como la distribución de los recursos en las diferentes industrias”5
Esta plataforma es una herramienta que integra elementos electrónicos y software de programación que podrían ser incorporados en procesos productivos. El empleo de esa plataforma ayudará a comprender a los estudiantes aspectos importantes del proceso de identificación de una planta y el diseño de controladores. Por tanto este proyecto generará un producto de indudable valor didáctico que podrá ser usado en posteriores prácticas en el departamento de electrónica de la universidad pedagógica nacional y en escenarios de educación básica secundaria y media en las instituciones educativas, que no cuentan con este tipo de material para el aprendizaje.
Contar con dispositivos que permitan poner en práctica conocimientos teóricos, hará que los estudiantes de electrónica de la universidad pedagógica pongan en práctica diferentes estrategias de control que les permita tener una visión más clara de los métodos estudiados.
El desarrollo de plantas didácticas para realizar prácticas es una herramienta importante para el aprendizaje de una rama como es el control automático. Contar con un dispositivo de control no convencional en el ámbito académico, brindará a los estudiantes la posibilidad de desarrollar habilidades en técnicas de control de procesos industriales.
Se pretende con la construcción de esta plataforma de levitación neumática, que los estudiantes del departamento de Electrónica de la Universidad Pedagógica Nacional que cursan los diferentes niveles de sistemas de control, pongan en práctica diferentes estrategias de control que permitirán comprender de forma práctica el funcionamiento y modelamiento de éstos sistemas.
Al finalizar el trabajo se donara la plataforma al departamento de electrónica de la universidad pedagógica nacional.
55 The Balls-in-Tubes Experiment Alvaro E. Gil, Nicanor Quijano, and Kevin M. Passino Dept. Electrical and Computer Engineering The Ohio State University 2015 Neil Avenue, Columbus, OH 43210

OBJETIVO GENERAL
Diseñar un controlador difuso para una plataforma de levitación neumática, con el fin de mantener una altura máxima uniforme de tres pelotas de ping-pong suspendidas por un flujo de aire.
OBJETIVOS ESPECIFICOS
Generar la correcta administración del recurso de aire a las diferentes zonas de la planta.
Establecer el algoritmo de control por medio de un software comercial (posiblemente Matlab), que facilite la implementación de un control difuso.
Construir la plataforma de levitación neumática, la cual nos servirá para las pruebas de experimentación del control difuso.
METODOLOGÍA
La metodología de desarrollo que se utilizará para el proyecto será basada por ciclos de vida RUP*, las cuales producirán nuevas visiones del proyecto a medida de que se va avanzando, estos ciclos están compuestos por diferentes fases, que a su vez estarán compuestas por iteraciones, las cuales nos arrojarán resultados eficientes para el óptimo desarrollo del proyecto. Estas fases son:
El inicio y estudio del proyecto, el cual se realizará haciendo una indagación y recolección de varias fuentes de información, que puedan proporcionar datos sobre las diferentes técnicas de control para el diseño de una plataforma de levitación neumática y en especial con el tipo de control con el cual se pretende desarrollar el proyecto.
** Esta metodología basada en ciclos produce una nueva versión del producto, cada ciclo está compuesto por fases y cada fase por una iteración a la cual se reproduce un ciclo en cascada en menor escala.

Sigue una fase de elaboración en la cual se definirá la funcionalidad del algoritmo de control difuso el cual será desarrollado en un software comercial, se definirá la arquitectura apropiada tanto del controlador como de la plataforma, se definirá el óptimo procesamiento de datos capturados con la cámara y por último se asignan los materiales necesarios para el diseño y construcción de la planta como son dispositivos electrónicos y los elementos necesarios para la construcción del levitador neumático.
Por último está la fase de la construcción la cual dependerá del análisis y estudio de la fase anterior, se tendrá la arquitectura final empalmando el controlador con la plataforma de levitación, también en esta fase se realizarán las pruebas y experimentación pertinentes para el buen funcionamiento de la plataforma y por último se documentará la planta construida como el funcionamiento de la misma.
El producto final se obtendrá gracias a las iteraciones donde cada una tiene un aparte de análisis, diseño e implementación.

ANTECEDENTES
Proyecto realizado en el Departamento de Ingeniería Eléctrica y Computación de la Universidad Estatal de Ohio. Alvaro E. Gil, Nicanor Quijano, y Kevin M. Passino. 05 de abril 2004.
THE BALLS IN TUBES EXPERIMENTEste documento muestra la estrategia de asignación de recursos distribuidos para el desarrollo de un levitador neumático utilizando el software dSPACE el cual se basa en Matlab/Simulink para el desarrollo del algoritmo de control de la planta. Describen de una forma clara los pasos que siguieron tanto en la elaboración del algoritmo, como adquisición de datos y materiales necesarios para la construcción de la plataforma de levitación.Este experimento fue desarrollado para ser un banco de pruebas de bajo costo mostrando la estrategia de asignación de recursos dinámicos.
Trabajo realizado en la Universidad Autónoma de San Luis Potosí, México.
SUSPENSIÓN EÓLICA DE OBJETOS BASADOS EN LABVIEW
Este trabajo muestra la implementación del Software de instrumentación virtual y tiempo real LabView para el desarrollo de una planta de suspensión de objetos. Este utiliza un ventilador DC para mantener el objeto verticalmente que a su vez es controlado por un convertidor CD-DC. El trabajo fue desarrollador por medio de un control PID que regula la posición de salida como la altura del objeto.
Proyecto realizado en la Escuela Superior de ingenieros, Universidad de Sevilla, España.

DISEÑO DE ESTRATEGIAS DE CONTROL PARA UN SISTEMA DE LEVITACIÓN MEUMATICA.
En este documento muestran diversas estrategias de control para el desarrollo de un sistema de levitación, dando a conocer varia información sobre los diferentes sistemas de control con el cual se pueden desarrollar el proyecto. En este realizan un estudio sobre control PID, control Robusto H∞, Control Predictivo Generalizado (GPC) y control borroso. El estudio lo realizan mostrando resultados mediante el programa LabView.
Tesis realizada en la Universidad de Los Andes, Bogotá. Ana María Calderón Bonilla.
CONTROL ADAPTATIVO APLICADO A LEVITADORES NEUMATICOS ACOPLADOS
En este documento se muestra la construcción de una planta de levitación neumática por medio de tubos PVC, cuyo objetivo fundamental es administrar el recurso del aire de forma óptima en diferentes zonas de la planta, para esto plantean diferentes tipos de topologías de diseño de la planta para determinar cuál es la adecuada. Para esto se utilizó un control adaptativo

MARCO TEÓRICO

CRONOGRAMA
ACTIVIDAD ENE FEBR MAR ABRIL MAYO JUNIO JULIO AGOS SEPTI OCTU NOVI
Recolección De información
Análisis de información
Diseño y construcción de la plataforma
Caracterización de la planta y adquisición de datos
Implementación del algoritmo de control
Pruebas y experimentación
Documento final
Producto final
Sustentación

BIBLIOGRAFIA
Lascano,R.(2009). Sistemas de Control Distribuido: Replication Dynamics en Levitadores Neumaticos Acoplados. Universidad de Los Andes, Bogotá
Ordoñez, D. Jacome, M. Gonzalez, F. (2009). Implimentación y estudio comparativo de técnicas de control PID y FUZZY en controladores lógicos programables. RESET-UTS, VOL 1, (NUM 4), PAG 0-28.
Escaño, J. Agarín, D. (2004). Identificación y control de posición de un sistema de levitación neumática. Universidad de Sevilla. Pag 0-7.
Quijano, N. Gil, A. Passino, K. (2004). Experiments for Distributed and Networked Dynamic Resource Allocation, Scheduling, and Control. Universidad Ohio.
Calderon, A. (2009). Control Adaptativo aplicado a levitadores
neumaticos acoplados. Universidad de los Andes, Bogotá. Lopez, E. Aguiñaga, D. (2005). Suspensión eólica de objetos
basados en Labview. Universidad Autonoma de San Luis Potosí. Mexico. Pag 0-6.
ASESOR PROPUESTO: Diego Mauricio Rivera.