Proyecto Control 1
19
INTRODUCCION En este proyecto se realizó un sistema de control llamado seguidor de luz tipo girasol, el cual tiene como función principal la detección de un punto de luz dentro de un ángulo de detección de sus sensores y así dirigirse hacia él, para su realización se utilizó un diagrama de bloque del sistema, el cual es una representación matemática del sistema físico, acorde a esto el circuito, en donde se conectaron de manera coherente cada uno de los materiales para garantizar un óptimo funcionamiento del artefacto.
-
Upload
alexha-marthinezz -
Category
Documents
-
view
47 -
download
2
Transcript of Proyecto Control 1
INTRODUCCION
En este proyecto se realizó un sistema de control llamado seguidor de luz tipo girasol, el cual
tiene como función principal la detección de un punto de luz dentro de un ángulo de detección de
sus sensores y así dirigirse hacia él, para su realización se utilizó un diagrama de bloque del
sistema, el cual es una representación matemática del sistema físico, acorde a esto el circuito, en
donde se conectaron de manera coherente cada uno de los materiales para garantizar un óptimo
funcionamiento del artefacto.
OBJETIVOS
Objetivo general
Diseñar y construir un sistema de control retroalimentado para la orientación en un solo
plano de un modelo mecánico respecto a una señal intensidad lumínica determinada.
Objetivos específicos
Conocer los principios y aplicaciones básicas de un sistema de control retroalimentado
Emplear sensores para conseguir información del entorno que reaccione en un
dispositivo según los datos obtenidos por los mismos.
MARCO TEORICO
SISTEMA DE CONTROL
Un sistema es un conjunto de dispositivos que controlan un proceso o una señal, los tipos de
sistemas de control que existen son:
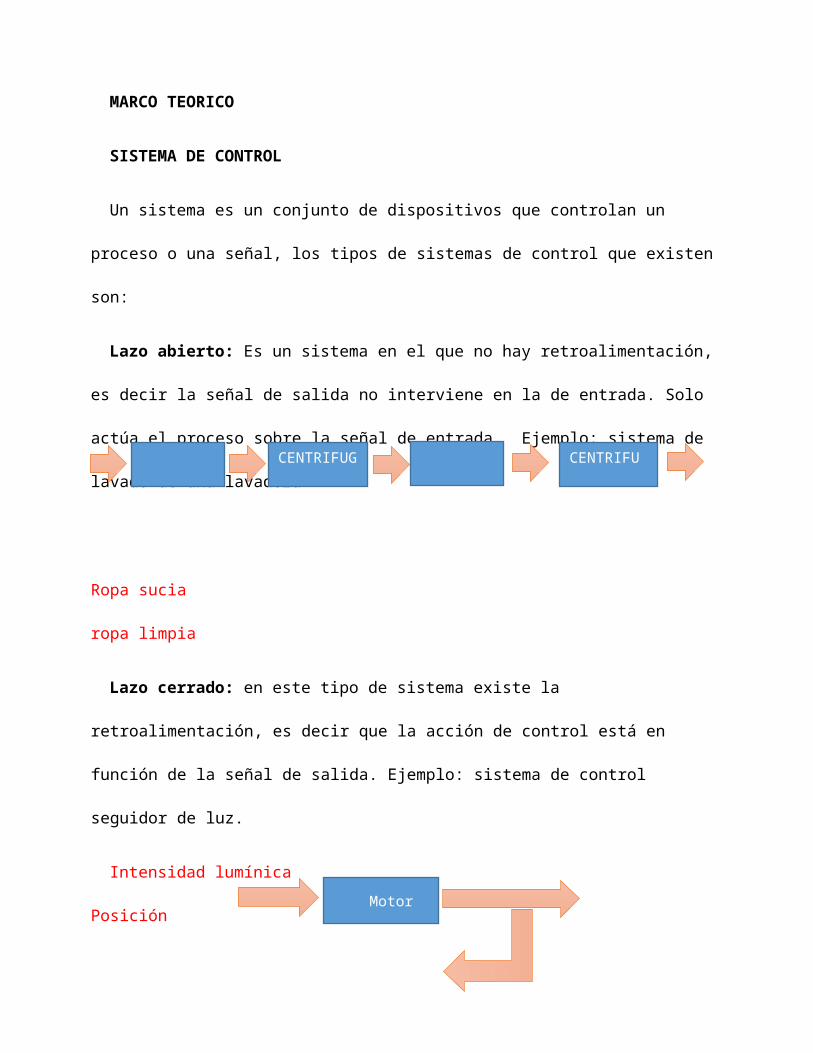
Lazo abierto: Es un sistema en el que no hay retroalimentación, es decir la señal de salida no
interviene en la de entrada. Solo actúa el proceso sobre la señal de entrada. Ejemplo: sistema de
lavado de una lavadora
Ropa sucia ropa limpia
Lazo cerrado: en este tipo de sistema existe la retroalimentación, es decir que la acción de
control está en función de la señal de salida. Ejemplo: sistema de control seguidor de luz.
Intensidad lumínica Posición
SENSORES
Un sensor es un dispositivo diseñado para recibir información de una magnitud del exterior y
transformarla en otra magnitud, normalmente eléctrica, que seamos capaces de cuantificar y
manipular.
REMOJO CENTRIFUGA ENJUAGA CENTRIFUGA
Motor
Fotorresistencia
Los captadores fotoeléctricos:
La construcción de este tipo de sensores, se encuentra basada en el empleo de una fuente de
señal luminosa (lámparas, diodos LED, diodos láser etc...) y una célula receptora de dicha señal,
como pueden ser fotodiodos, fototransistores o LDR etc.
SEGUIDOR DE LUZ
Es un artefacto que como su nombre lo indica sigue la luz, este es un sistema de control de tipo
lazo cerrado en el cual la retroalimentación se hará por medio de sensores fotoeléctricos como son
las fotorresistencias, además es un artefacto conjunto ya que mezcla electrónica y mecánica puesto
que un sistema mecánico le permitirá el movimiento para dirigirse hacia la luz.
CIRCUITOS AMPLIFICADORES OPERACIONALES.
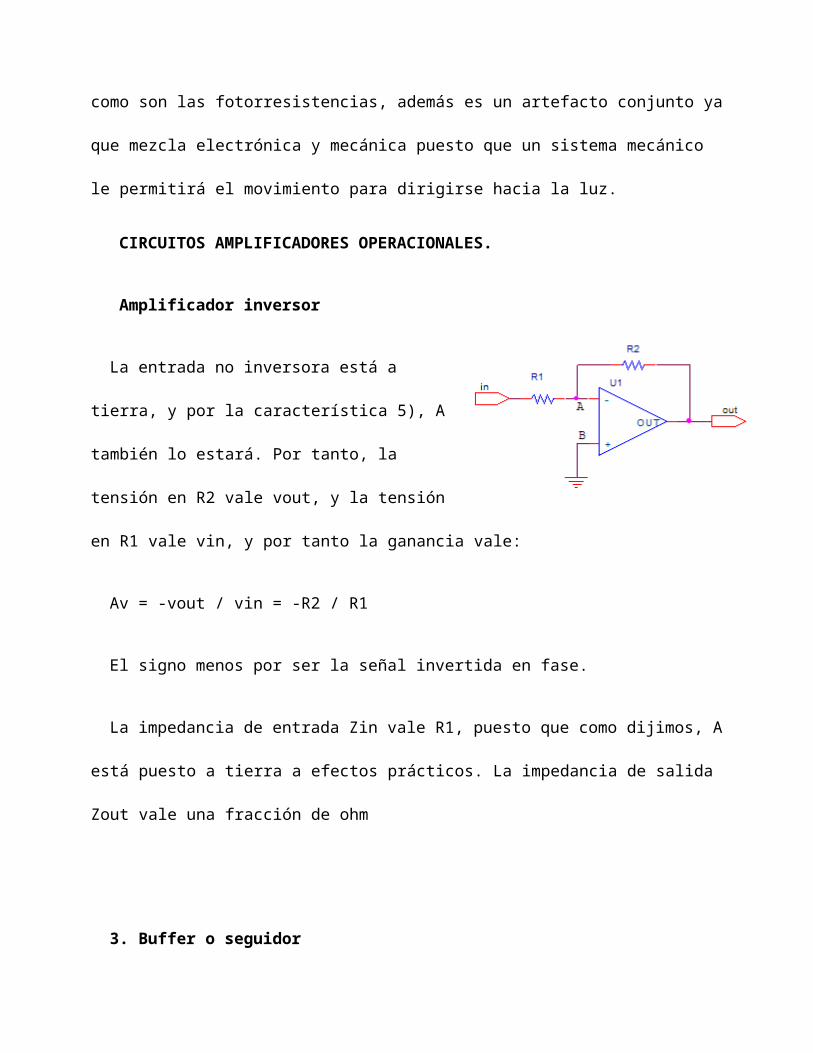
Amplificador inversor
La entrada no inversora está a tierra, y por la
característica 5), A también lo estará. Por tanto, la
tensión en R2 vale vout, y la tensión en R1 vale vin, y
por tanto la ganancia vale:
Av = -vout / vin = -R2 / R1
El signo menos por ser la señal invertida en fase.
La impedancia de entrada Zin vale R1, puesto que como dijimos, A está puesto a tierra a
efectos prácticos. La impedancia de salida Zout vale una fracción de ohm
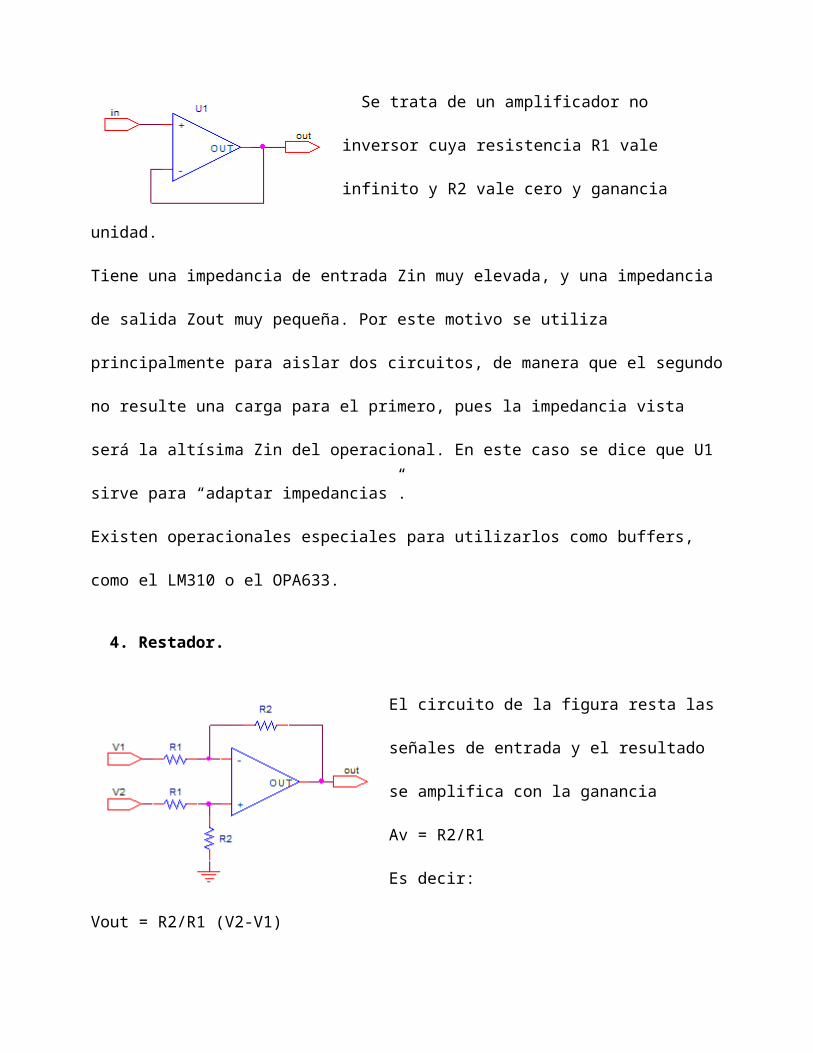
3. Buffer o seguidor
Se trata de un amplificador no inversor cuya resistencia
R1 vale infinito y R2 vale cero y ganancia unidad.
Tiene una impedancia de entrada Zin muy elevada, y una
impedancia de salida Zout muy pequeña. Por este motivo
se utiliza principalmente para aislar dos circuitos, de manera que el segundo no resulte una carga
para el primero, pues la impedancia vista será la altísima Zin del operacional. En este caso se dice
que U1 sirve para “adaptar impedancias”.
Existen operacionales especiales para utilizarlos como buffers, como el LM310 o el OPA633.
4. Restador.
El circuito de la figura resta las señales de entrada y
el resultado se amplifica con la ganancia
Av = R2/R1
Es decir:
Vout = R2/R1 (V2-V1)
EXPLICACION GENERAL
Seguidor de luz tipo Girasol, es un dispositivo que sigue una trayectoria delimitada por una
comparación entre la intensidad lumínica de los sensores, de modo que hay una comparación de la
intensidad lumínica que le llega a las fotorresistencias y el dispositivo girara hacia el lado del
sensor con mayor intensidad, si los dos sensores tienen la misma intensidad lumínica el dispositivo
quedara inmóvil.
El mecanismo que le permitirá el movimiento constara de plataforma de seguimiento, motor,
eje, sensores y una serie de elementos electrónicos y mecánicos, que se conmutaran entre sí de
acuerdo a la señal recibida por los sensores que serán las fotorresistencias ejecutaran la acción
deseada.
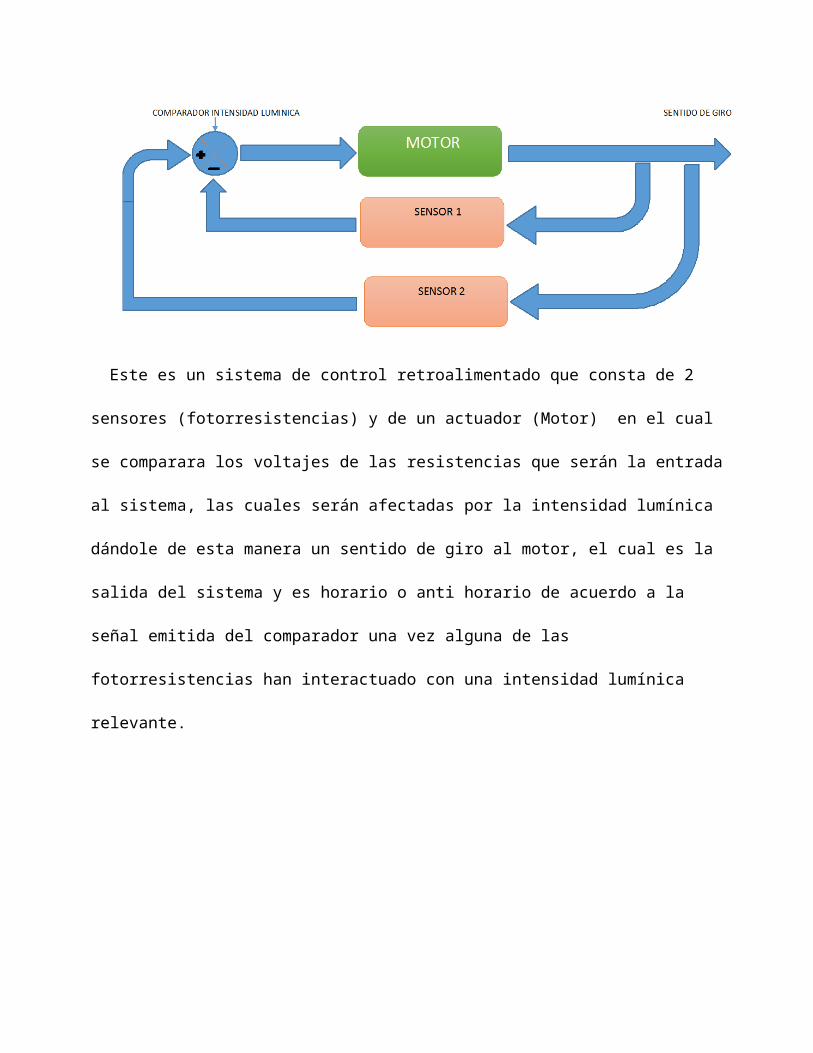
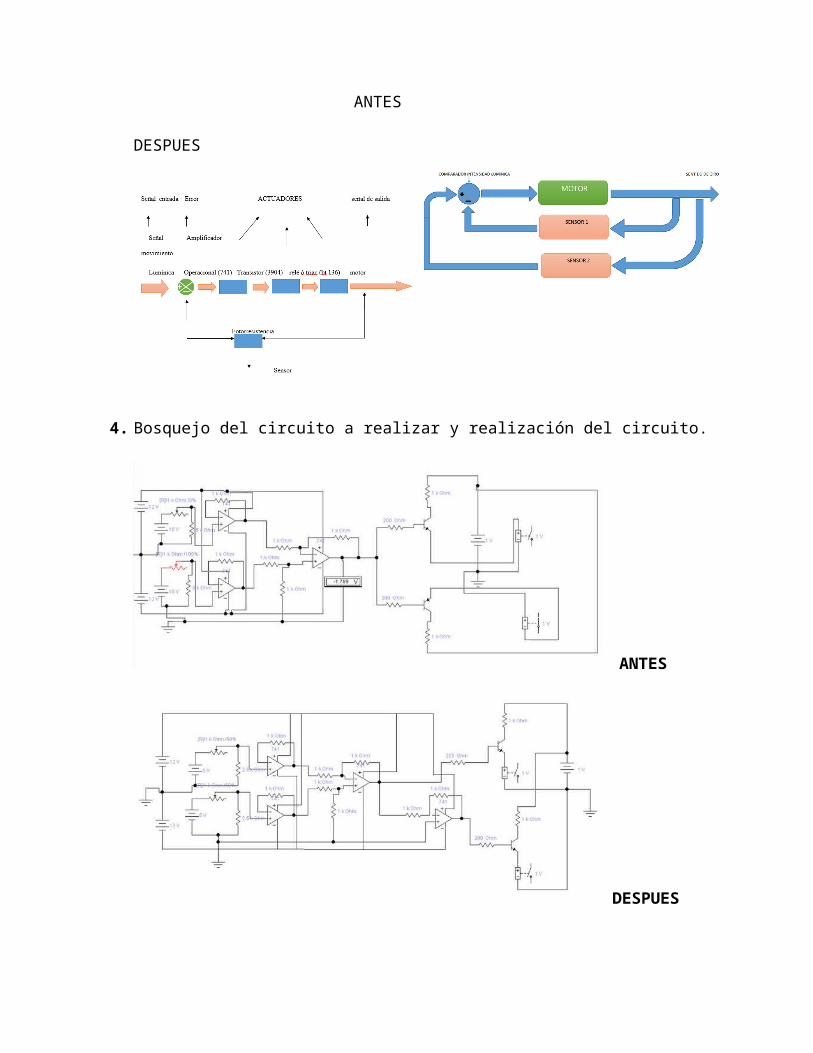
DIAGRAMA DE BLOQUES
Este es un sistema de control retroalimentado que consta de 2 sensores (fotorresistencias) y de
un actuador (Motor) en el cual se comparara los voltajes de las resistencias que serán la entrada al
sistema, las cuales serán afectadas por la intensidad lumínica dándole de esta manera un sentido de
giro al motor, el cual es la salida del sistema y es horario o anti horario de acuerdo a la señal
emitida del comparador una vez alguna de las fotorresistencias han interactuado con una
intensidad lumínica relevante.
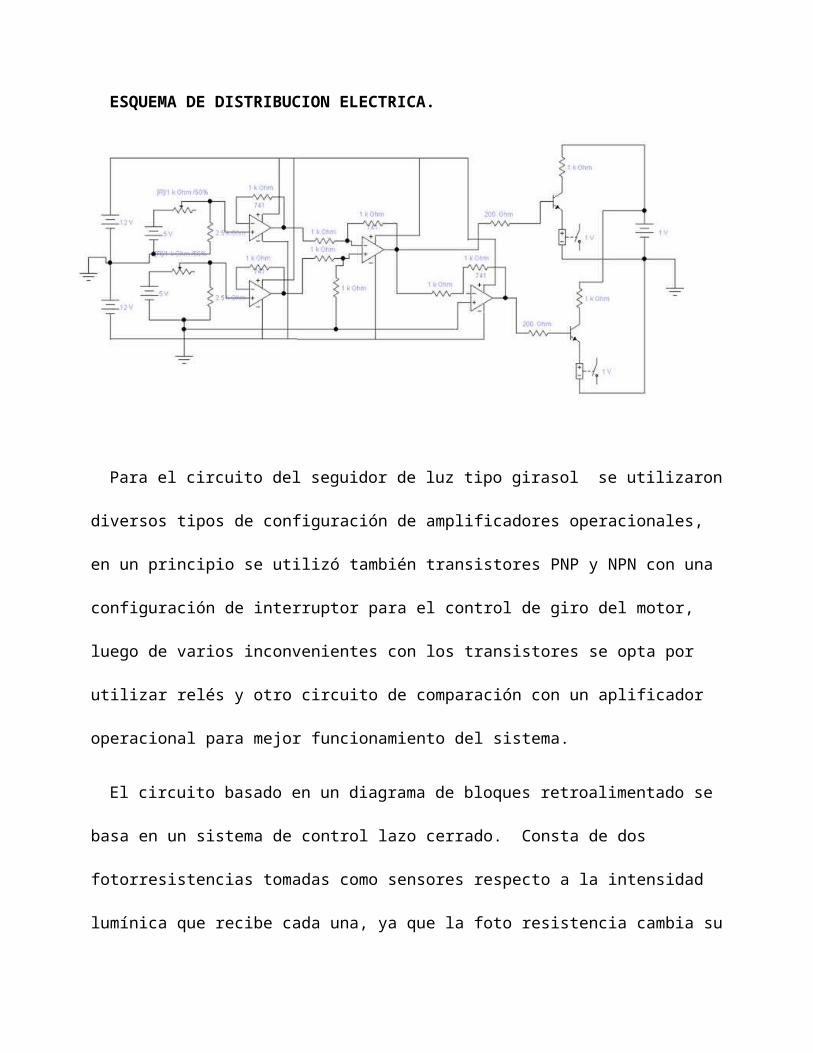
ESQUEMA DE DISTRIBUCION ELECTRICA.
Para el circuito del seguidor de luz tipo girasol se utilizaron diversos tipos de configuración de
amplificadores operacionales, en un principio se utilizó también transistores PNP y NPN con una
configuración de interruptor para el control de giro del motor, luego de varios inconvenientes con
los transistores se opta por utilizar relés y otro circuito de comparación con un aplificador
operacional para mejor funcionamiento del sistema.
El circuito basado en un diagrama de bloques retroalimentado se basa en un sistema de control
lazo cerrado. Consta de dos fotorresistencias tomadas como sensores respecto a la intensidad
lumínica que recibe cada una, ya que la foto resistencia cambia su valor resistivo dependiendo de
la intensidad lumínica recibida, estos impiden y regulan la corriente recibida en el primer
amplificador operacional de comparación para que estos voltajes recibidos a comparar no sean
afectados por los demás dispositivos electrónicos del sistema, se utiliza en cada señal un
amplificador operacional con configuración de seguidor protector, que protege el valor de la señal
para ser comparada de una manera más eficiente. Luego de cada amplificador protector cada señal
se compara con el amplificador operacional de tipo restador de ganancia 1, el cual unificara las
señales de los sensores para dar una respuesta la cual será utilizada para controlar el movimiento
del motor. La señal de salida del comparador puede ser negativa o positiva eventualmente. La
señal positiva para el control de giro del motor del sistema se toma con un transistor PNP con
configuración interruptor que se activa solo cuando la señal es positiva. La señal negativa es
tomada con un amplificador operacional tipo inversor de ganacia1 los cual permite que el voltaje
negativo se invierta a positivo y sea útil para activar el conjunto de relés dispuestos como puente-
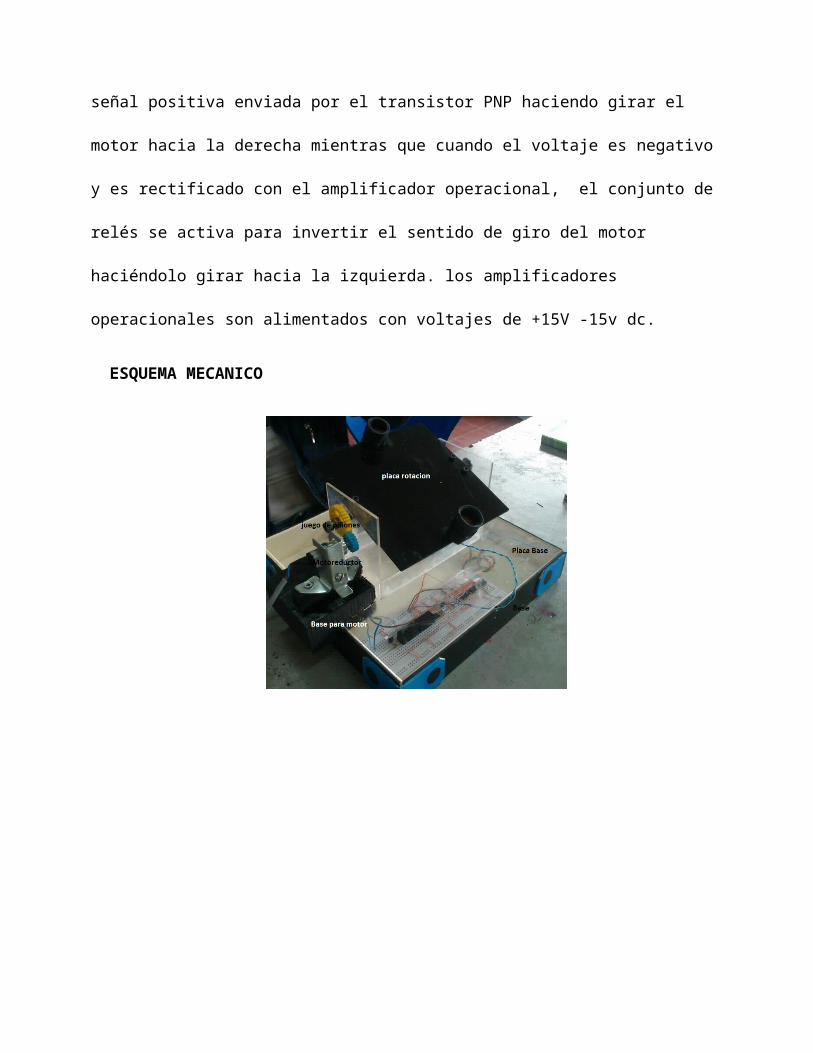
H para el control del sentido de giro del motor. El puente-H de relés funciona con la señal positiva
enviada por el transistor PNP haciendo girar el motor hacia la derecha mientras que cuando el
voltaje es negativo y es rectificado con el amplificador operacional, el conjunto de relés se activa
para invertir el sentido de giro del motor haciéndolo girar hacia la izquierda. los amplificadores
operacionales son alimentados con voltajes de +15V -15v dc.
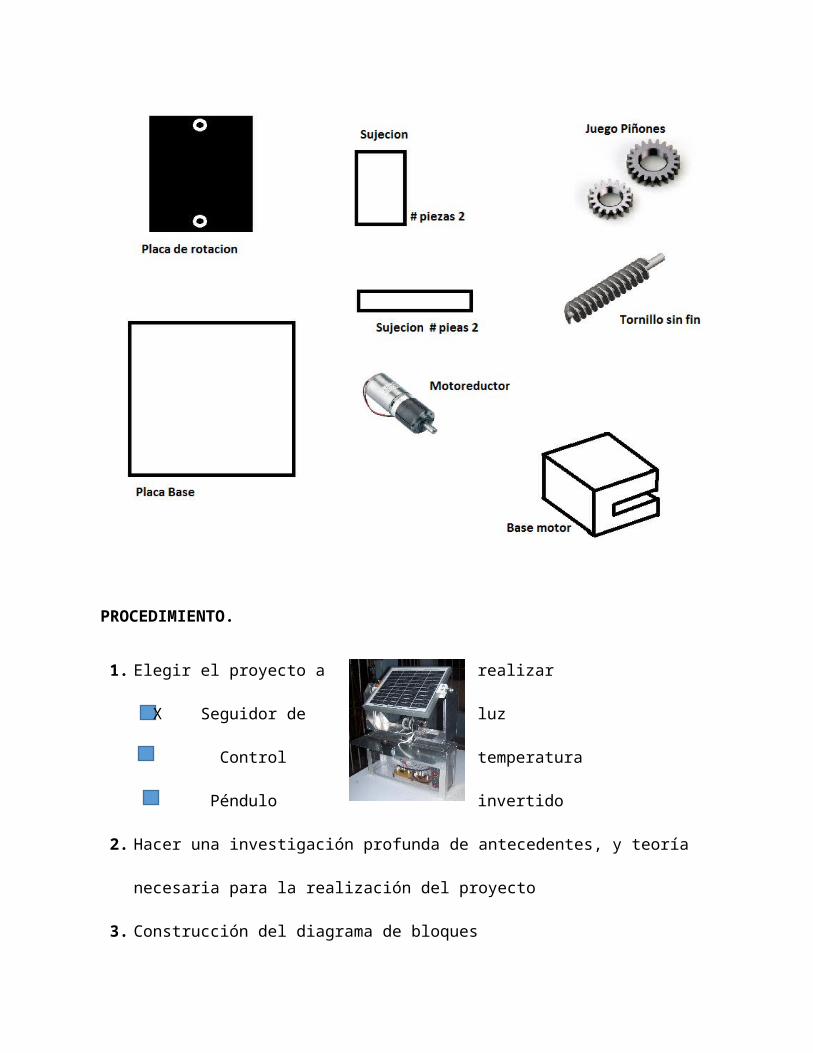
ESQUEMA MECANICO
PROCEDIMIENTO.
1. Elegir el proyecto a realizar
X Seguidor de luz
Control temperatura
Péndulo invertido
2. Hacer una investigación profunda de antecedentes, y teoría necesaria para la realización del
proyecto
3. Construcción del diagrama de bloques
ANTES DESPUES
4. Bosquejo del circuito a realizar y realización
del circuito.
ANTES
DESPUES
5. Construcción mecánica del proyecto
6. Ensamblaje Mecánica- Electrónico
MATERIALES A UTILIZAR
Amplificador operacional 741 ó LM 324: un amplificador operacional es un dispositivo
electrónico que consta de dos entradas una salida, que de acuerdo como se conecten sus terminales
a un tipo de circuito cumple una función determinada ya sea inversor, no inversor, sumador,
restador, seguidor etc.
Fotorresistencias: Una fotorresistencia es un sensor de la familia de los fotoeléctricos que
reacciona a un fenómeno físico, la intensidad lumínica incidente con una disminución de
resistencia con el aumento de luminosidad.
Transistor BJT 3904 o 3906: El transistor es un dispositivo electrónico semiconductor
utilizado para producir una señal de salida en respuesta a otra señal de entrada. 1 Cumple funciones
de amplificador, oscilador, conmutador o rectificador.
Relés: El relé o relevador es un dispositivo electromecánico. Funciona como un interruptor
controlado por un circuito eléctrico en el que, por medio de una bobina y un electroimán, se
acciona un juego de uno o varios contactos que permiten abrir o cerrar otros circuitos eléctricos
independientes
Motor: Un motor es la parte sistemática de una máquina capaz de hacer funcionar el sistema,
transformando algún tipo de energía (eléctrica, de combustibles fósiles, etc.), en energía
mecánica capaz de realizar un trabajo.
Engranajes: Se denomina engranaje al mecanismo utilizado para transmitir potencia de un
componente a otro dentro de una máquina. Los engranajes están formados por dos ruedas dentadas,
de las cuales la mayor se denomina corona y la menor piñón.
OTROS MATERIALES
Acrílico, tornillo sin fin, cartón paja, madera.

CONCLUSIONES
Diseñamos y construimos un sistema de control retroalimentado.
Aprendimos sobre los principios y aplicaciones básicas de un sistema de control
retroalimentado
Empleamos sensores para conseguir información del entorno que reaccione en un
dispositivo según los datos obtenidos por los mismos.
Elaboramos un proyecto haciendo uso de los conocimientos adquiridos en clase.
BIBLIOGRAFIA
Ladelec. (2007-2009). Seguidor de luz tipo girasol para panel solar. Recuperado de
http://www.ladelec.com/
Mosencahua. (Agosto 22, 2008). Seguidor de luz. Recuperado de http://hiperc.wordpress.com/
Wikipedia. (2001- ). Sistema de Control. Wikipedia [versión electrónica].
http://es.wikipedia.org/
Molina. Sensores. Recuperado de http://www.profesormolina.com.ar/
Wikipedia. (2001- ).TRIAC. Wikipedia [versión electrónica]. http://es.wikipedia.org/
Wikipedia. (2001- ).Rele. Wikipedia [versión electrónica]. http://es.wikipedia.org/
Wikipedia. (2001- ). Motor. Wikipedia [versión electrónica]. http://es.wikipedia.org/
Wikipedia. (2001- ). Trenasistor. Wikipedia [versión electrónica]. http://es.wikipedia.org/