Universidad de Valladolid UVa - D DIINNÁÁMMIICCAA ......Euler, y simplificándolas para los casos...
105
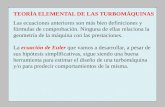
D D D I I I N N N Á Á Á M M M I I I C C C A A A D D D E E E L L L S S S Ó Ó Ó L L L I I I D D D O O O R R R Í Í Í G G G I I I D D D O O O x y z= z 1 G x 1 = x’ 1 y 1 ψ ψ ψ & θ θ θ & y’ 1 z’ 1 = z’’ 1 ϕ & ϕ ϕ y’’ 1 x’’ 1
Transcript of Universidad de Valladolid UVa - D DIINNÁÁMMIICCAA ......Euler, y simplificándolas para los casos...

DDDIIINNNÁÁÁMMMIIICCCAAA DDDEEELLL SSSÓÓÓLLLIIIDDDOOO RRRÍÍÍGGGIIIDDDOOO
x
y
z= z1
G
x1 = x’1
y1 ψ ψ
ψ&
θ
θ
θ&
y’1
z’1 = z’’1
ϕ&ϕ
ϕ
y’’1
x’’1

- 2/105 -
Índice.
1. Introducción............................................................................................................................................4
2. Cantidad de movimiento lineal y momento angular de un sólido rígido. ..........................................5
3. Momento angular de un sólido rígido respecto de su centro de masas. ...........................................10
4. Relación entre el momento angular y la velocidad angular de un sólido rígido..............................16
5. Reducción del estudio cinético de un sólido rígido a su centro de masas.........................................22 5.1. Momento angular de un sólido rígido restringido a girar alrededor de un punto fijo......................25
6. Aplicación de los principios del impulso lineal y angular al movimiento de un sólido rígido........28
7. Energía cinética de un sólido rígido en tres dimensiones. .................................................................29 7.1. Energía cinética de un sólido rígido con un punto fijo....................................................................35 7.2. Trabajo. ...........................................................................................................................................37
8. Movimiento de un sólido rígido en tres dimensiones. ........................................................................40 8.1. Ecuación de Euler del movimiento. Extensión del principio de d’Alembert. .................................44 8.2. Movimiento de un sólido con un punto fijo. ...................................................................................48 8.3. Rotación de un sólido rígido alrededor de un eje fijo......................................................................51 8.4. Estudio del equilibrio de ejes o árboles planos rotatorios. ..............................................................53
9. Movimiento de un giroscopio...............................................................................................................56 9.1. Precesión estacionaria en un giroscopio..........................................................................................62
9.1.1. Precesión lenta y rápida. Velocidad mínima de rotación propia. ............................................69 9.1.2. Influencia de la geometría en el movimiento de un sólido de revolución con precesión
estacionaria y momento de las fuerzas exteriores nulo. ..........................................................72 9.1.2.1. Aplicación a casos particulares. ........................................................................................74
9.1.3. Movimiento de un sólido de revolución con precesión estacionaria y momento de las fuerzas exteriores nulo (modelo de Poinsot). ..........................................................................79
9.1.3.1. Análisis del movimiento en función del axoide móvil. .....................................................86 9.2. Análisis de estabilidad de un sólido con momento nulo ante una perturbación. .............................89
9.2.1. Comportamiento de un sólido que gira inicialmente respecto del eje de inercia máxima. .....91 9.2.2. Comportamiento de un sólido que gira inicialmente respecto del eje de inercia mínima. ......94 9.2.3. Comportamiento de un sólido que gira inicialmente respecto del eje de inercia intermedia. .96 9.2.4. Sólido con simetría axil. .........................................................................................................97 9.2.5. Sólido con simetría polar. .......................................................................................................99
ANEXO 1. Bibliografía ........................................................................................................................ 105
Revisión: octubre 2012

- 3/105 -
Mirada previa
En este tema se va a realizar un análisis del estudio dinámico del sólido rígido en tres dimensiones.
Comienza con la determinación de la cantidad de movimiento lineal y el momento angular respecto del origen de un sistema de referencia fijo, relacionando ambas expresiones con las características geométricas del centro de masas del sólido rígido.
Posteriormente se comprueba que la cantidad de movimiento angular es la misma si el estudio se hace con velocidades absolutas o relativas respecto de un sistema de referencia solidario al centro de masas y con movimiento de traslación, desarrollándose la expresión en función del tensor de inercia másico.
A continuación se analiza la reducción de sistema dinámico al centro de masas del sólido o a un punto fijo, si existe, aplicando los principios de impulso lineal y angular, la energía cinética del sólido y el trabajo generado por las fuerzas y momentos.
Se sigue con el análisis del movimiento de un sólido en tres dimensiones, obteniendo las expresiones de Euler, y simplificándolas para los casos de sólido con un punto fijo, sólido que gira alrededor de un eje fijo y sólido plano que gira alrededor de un eje fijo.
Se entra finalmente en el análisis giroscópico, en el que se desarrollan las ecuaciones de equilibrio de Euler a partir de sus parámetros y se aplica al caso de precesión estacionaria, obteniéndose los valores de precesión rápida y lenta, la condición de velocidad mínima de rotación propia y la influencia de la geometría en el giro de un sólido.
Finaliza el tema con el estudio de la estabilidad de un sólido giratorio ante pequeñas perturbaciones.
Preguntas de inspección
1. ¿Qué son la cantidad de movimiento lineal y el momento angular respecto de un punto fijo? 2. ¿Es necesario realizar los procesos de integración de la cantidad de movimiento lineal del entorno
infinitesimal de un punto para determinar la del sólido? 3. ¿Qué influencia tienen las fuerzas interiores para el conjunto de todos los puntos de un sólido? 4. ¿Cuánto vale el momento estático respecto del centro de masas de un sólido? 5. ¿Por qué se utiliza un sistema de referencia solidario al centro de masas y con movimiento de
traslación en el estudio del momento angular? 6. ¿Qué movimiento puede tener un sólido rígido respecto del sistema de referencia definido en la
pregunta anterior? 7. ¿Cómo son la velocidad angular y el momento angular cuando los momentos principales de inercia del
sólido son iguales entre sí? 8. ¿Para qué se utiliza un sistema de referencia asociado al centro de masas de un sólido en el que el
tensor de inercia no varía? 9. ¿Cuándo coincide la aceleración angular con la derivada de las componentes de la velocidad angular? 10. ¿Qué es la precesión estacionaria? 11. ¿Qué se entiende por movimiento estable de un sólido rígido?

1. Introducción.
- 4/105 -
1. Introducción.
Capacidades a desarrollar en el aprendizaje
Determinar los pasos y la estructura seguida en el estudio. Indicar el objetivo a alcanzar en cada uno de los pasos.
La dinámica del sólido rígido es la parte de la mecánica que analiza la relación entre las fuerzas que actúan en un sólido y el movimiento que éste adquiere.
El estudio se plantea desde un punto de vista tridimensional, no entrando en conceptos bidimiensionales ya que se pueden llegar a ellos a partir de eliminar una de las componentes.
Se considera este tema una continuación natural de la cinemática de sólido rígido, ya que es necesario conocer conceptos desarrollados en él como son el movimiento relativo, la velocidad y aceleración absoluta, y sobre todo los ángulos de Euler para la definición de la orientación de un sistema de referencia que cumpla con condiciones cinemáticas necesarias para el estudio dinámico mediante una formulación sencilla.
El análisis parte de del entrono infinitesimal del punto y, a partir del uso de procesos de integración, y utilizando conceptos geométricos asociados al centro de masas, poder generalizar las expresiones a todo el sólido. Se plantean conceptos sencillos como cantidad de movimiento lineal o momento angular para, a partir de su derivación respecto del tiempo, relacionarlos con el sumatorio de fuerzas o momentos respecto del centro de masas.
En prácticamente todos los estudios se utiliza un sistema de referencia solidario al centro de masas del sólido y con movimiento de traslación, que simplifica los procesos de integración y permite utilizar ecuaciones que en principio solo serían válidas en sistemas de referencia inerciales. Esta referencia se ha utilizado en el momento angular respecto del centro de masas, la energía cinética del sólido, el trabajo y finalmente en las ecuaciones de equilibrio dinámico de Euler.
A partir del análisis del movimiento de un giroscopio se pueden justificar efectos como la inercia al movimiento giratorio de un sólido respecto de un eje principal de inercia, o la estabilidad en el movimiento de los vehículos de dos ruedas. Para simplificar los procesos se estudiarán distintos casos de precesión estacionaria de un giroscopio y su estabilidad ante una perturbación.

2. Cantidad de movimiento lineal y momento angular de un sólido rígido.
- 5/105 -
2. Cantidad de movimiento lineal y momento angular de un sólido rígido.
Capacidades a desarrollar en el aprendizaje
Determinar la cantidad de movimiento lineal y momento angular de un sólido rígido respecto del origen del sistema de referencia inercial.
Introducir las características del centro de masas en las expresiones. Derivar la cantidad de movimiento lineal y momento angular respecto del origen del sistema de referencia
inercial y del tiempo. Determinar la influencia de las fuerzas interiores en el sumatorio de fuerzas y momentos para el conjunto de
todos los puntos del sólido. Obtener las expresiones finales de equilibrio dinámico de fuerzas y momentos.
cantidad de movimiento lineal
En un sólido rígido con movimiento respecto de un sistema de referencia fijo o inercial (Oxyz) se define el vector cantidad de movimiento lineal o momento lineal ( iLd
r) del entrono infinitesimal de un punto (Pi) de
masa asociada dm y velocidad ivr
(Fig. 2.1) a la expresión
ii vdmLdrr
=
Para obtener la cantidad de movimiento lineal de todo el sólido ( Lr
) se integra la expresión anterior en el dominio y se convierte en
∫∫∫ =⇒=m
im
iL
i dmvLdmvLd rrrr
r
Fig. 2.1 – Masa y velocidad del entorno de un punto.
momento angular Se define como momento angular infinitesimal (algunos autores lo llaman momento cinético) de la masa dm asociada al entorno de un punto Pi respecto de otro punto O ( oHd
r) a la expresión
iioiio L d rHdv dm rHdrrrrrr
×=⇒×=
Para obtener el momento angular de todo el sólido ( oHr
) se integra esta expresión en el dominio y se convierte en
∫∫∫ ×=⇒×=m
iiom
iiH
o v dm rHv dm rHdo
rrrrrr
r
Pi
dm
ivr
x
x’
O
G
y
y’
z
z’
irr
Grr
iLdr

2. Cantidad de movimiento lineal y momento angular de un sólido rígido.
- 6/105 -
Sin embargo, los desarrollos de las integrales obtenidas en la cantidad de movimiento lineal ( Lr
) y el momento angular ( oH
r) no son obvios, por lo que para su obtención se utiliza el concepto de centro de
masas (c.d.m.) del sólido.
centro de masas La posición del c.d.m. ( Grr
) de un sólido y sus derivadas primera y segunda respecto del tiempo ( Gr&r
y Gr&&r
) para el caso de sólidos de masa constante, vienen expresadas mediante
m
dmrr m
i
G
∫=
r
r
( ) mv dmvm
dmvv
m
dmr
dtdr
dtdr G
mi
mi
Gm
i
GGrr
r
r
r
r&r=⇒=⇒
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛== ∫
∫∫
( ) ma dmam
dmaa
m
dmv
dtdv
dtdr G
mi
mi
Gm
i
GGrr
r
r
r
r&&r=⇒=⇒
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛== ∫
∫∫
la segunda expresión, aplicada al concepto de momento lineal, permiten obtener
mvL mv dmv
dmvL
GG
mi
mi rr
rr
rr
=⇒
⎪⎪⎭
⎪⎪⎬
⎫
=
=
∫
∫
Concepto clave La cantidad de movimiento lineal de un sólido ( Lr
) coincide con la que tendría si toda su masa (m) estuviera concentrada en el centro de masas (G).
ecuación fundamental de la dinámica del
sólido rígido en fuerzas
Si se deriva esta expresión respecto del tiempo se obtiene la ecuación fundamental de fuerzas en el estudio de la dinámica del sólido rígido
( ) ma mvL mvdtdL
dtd
GGGr&r&rrr
==⇒=
y como, según la segunda ley de Newton
LdtLdF
&rr
r==∑
se llega a la expresión
Gam Frr
=∑
principio de d’Alembert
A la expresión que establece que la suma de las fuerzas externas que actúan sobre un cuerpo y las fuerzas de inercia forman un sistema de fuerzas en equilibrio se le denomina principio de d’Alembert.
0am F G
rrr=−∑

2. Cantidad de movimiento lineal y momento angular de un sólido rígido.
- 7/105 -
Concepto clave La aceleración que adquiere el centro de masas ( Ga
r) de un sólido rígido va a ser un vector
proporcional a la resultante del sistema de fuerzas exteriores ( ∑ Fr
) que actúa sobre él.
derivada del momento angular respecto del
tiempo
Con el momento angular respecto de un punto ( oHr
) se va a realizar el mismo proceso. Para la determinación de la derivada respecto del tiempo del momento angular de un sólido rígido respecto del origen (O) del sistema de referencia inercial ( oH
r), se parte de la expresión
∫ ×=m
iio v dm rHrrr
Si se deriva respecto del tiempo, utilizando la propiedad asociativa
∫∫∫ ×+×=⇒⎟⎟⎠
⎞⎜⎜⎝
⎛×=
mii
miio
miio v dm rv dm rHv dm r
dtdH
&rrr&r&rrr&r
pero el primer sumando se anula, ya que corresponde al producto vectorial de vectores paralelos
0v dm vv dm rvrm
iim
iiii
rrrr&rr&r=×=×⇒= ∫∫
luego la expresión de la derivada del momento angular respecto del tiempo y respecto del origen del sistema de referencia O ( oH
r) queda
∫∫∫
∫∫×=⇒
⎪⎪⎭
⎪⎪⎬
⎫
=×=×
×+×=
miio
mii
mii
mii
miio
v dm rH0v dm vv dm r
v dm rv dm rH&rr&r
rrrr&r
&rrr&r&r
fuerzas internas del sólido
Se considera ahora un entorno de la partícula Pi de masa dm en el que existe una aceleración iar
respecto del sistema de referencia inercial Oxyz, y se aplica el equilibrio dinámico a dicha partícula teniendo en cuenta el efecto todas las fuerzas que lo afectan.
Si se denomina ijfdr
la fuerza interna que otra partícula (Pj) del sólido ejerce sobre la Pi (Fig. 2.2), la
resultante de las fuerzas interiores ( ijFdr
) que las demás partículas del sistema ejercen sobre Pi es
∑=j
ijij fdFdrr

2. Cantidad de movimiento lineal y momento angular de un sólido rígido.
- 8/105 -
Pi Fi
x
O y
z
Pj
ijfdr
jifdr
irr
jrr
jirr
Fig. 2.2 – Fuerzas internas entre partículas de un sólido rígido.
ecuación fundamental de fuerzas en el entorno
de un punto
Si iFr
es la resultante de las fuerzas exteriores que actúan sobre la partícula Pi, la segunda ley de Newton aplicada a esta partícula adquiere la forma,
iiji adm FdFrrr
=+
Si ahora se premultiplica vectorialmente a la expresión por el vector de posición del punto respecto del sistema de referencia inercial ( ir
r), se obtiene
( ) iiijiiiiiijii dm arFdrFrdm arFdFr ×=×+×⇒×=+×rrrrrrrrr
Si esto se hiciera para todas las partículas del sólido rígido y se sumaran, se tendría
( ) ( ) ( )∫∑∑ ×=×+×m
iiP
ijiP
ii dm arFdrFrii
rrrrr
Pero para todos los sistemas de partículas tomados de dos en dos se anulan las fuerzas interiores, ya que aparecerían los términos
( ) ( )jijiji FdrFdrrrrr
×+×
que corresponden al momento que sobre la partícula Pi ejerce la fuerza generada por la Pj, mas el momento que sobre la partícula Pj ejerce la fuerza generada por la Pi, respectivamente. Como vectorialmente se puede poner (Fig. 2.2)
jiij rrrrrr
+=
sustituyendo en la expresión anterior se tiene
( ) ( ) ( ) ( )[ ] ( ) ( ) ( )jijijiiijijijiiijijiij
jijiji FdrFdrFdrFdrrFdrrrr
FdrFdr rrrrrrrrrrrrrr
rrrr
×+×+×=×++×⇒⎪⎭
⎪⎬⎫
+=
×+×
y por ser los vectores ijFdr
y jiFdr
opuestos y jiFdr
jirr
paralelos
jijijiij Fd||rFdFdrrrr
−=
se tiene

2. Cantidad de movimiento lineal y momento angular de un sólido rígido.
- 9/105 -
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 0FdrFdrFdrFrFd||rFdFd
FdrFdrFdrFr 0
jijiijiijiP
ii
jijijiij
jijijiiijiP
ii
i
i
r48476 rrrrrrrrrrrr
rrrrrrrr r
=×+×−×=×⇒⎪⎭
⎪⎬
⎫
−=
×+×+×=× =
∑∑
por lo que todos los términos se anulan, y finalmente
( ) ( ) ( )
( ) ( ) ( )∫∑∑
∫∑∑×=×⇒
⎪⎪⎭
⎪⎪⎬
⎫
=×
×=×+×
mii
Pii
Piji
mii
Piji
Pii
dm arFr0Fdr
dm arFdrFr
i
i
ii rrrrrr
rrrrr
Concepto clave Para el conjunto de todos los puntos del sólido rígido, la influencia de las fuerzas interiores es nula.
El término a la izquierda de la igualdad corresponde al momento de las fuerzas exteriores ( iFr
) que actúan
en el sólido rígido respecto del punto O ( OMr
)
( )∑ ×=iP
iiO FrMrrr
mientras que el término a la derecha de la igualdad es la derivada del momento angular respecto del tiempo
asociado al punto O ( OH&r
)
( )∫ ×=m
iiO adm rHrr&r
luego la expresión final es
ecuación fundamental de momentos de la
dinámica de sólidos rígidos
( ) ( )
( )( )
OO
miiO
PiiO
mii
Pii
HM
adm rH
FrM
adm rFr
i
i&rr
rr&r
rrr
rrrr
=⇒
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
×=
×=
×=×
∫
∑
∫∑
Concepto clave
El sumatorio de momentos de las fuerzas exteriores respecto del origen de un sistema de referencia inercial ( OM
r) es igual a la derivada del momento angular respecto del tiempo
respecto de dicho punto ( OH&r
).
Las expresiones
Gam Frr
=∑ OO HM&rr
=
son válidas únicamente cuando se aplican en sistemas de referencia inerciales (aquellos cuya velocidad es nula o que tienen movimiento de traslación con velocidad constante).

3. Momento angular de un sólido rígido respecto de su centro de masas.
- 10/105 -
3. Momento angular de un sólido rígido respecto de su centro de masas.
Capacidades a desarrollar en el aprendizaje
Utilizar en el análisis un sistema de referencia solidario al centro de masas y con movimiento de traslación. Introducir las características del centro de masas en la formulación dinámica. Comprobar que el momento angular respecto del centro de masas con un sistema de referencia inercial y
con un sistema de referencia solidario al centro de masas y con movimiento de traslación es el mismo. Comprobar que la derivada respecto del tiempo del momento angular respecto del centro de masas en base
inercial y en un sistema de referencia solidario al centro de masas y con movimiento de traslación es la misma.
Aplicarlo a las expresiones de equilibrio dinámico de fuerzas y momentos.
Como se verá más adelante, el análisis dinámico de un sólido se simplifica cuando se realiza en unos ejes que tengan origen en el c.d.m. (Gx’y’z’) y movimiento de traslación (Fig. 3.1) respecto del sistema de referencia inercial (Oxyz).
En este epígrafe se comprobará que, aunque la expresión GG HM&rr
= es válida únicamente para sistemas de referencia inerciales, el sistema anteriormente indicado Gx’y’z’, que no tiene por qué ser inercial, sí la cumple.
El momento angular del sólido ( GHr
) respecto del c.d.m. (G) viene expresado por
( )∫ ×=m
iiG v dm 'rHrrr
donde
'rir
- vector de posición de la partícula del sólido (Pi) respecto del c.d.m.
ivr
- velocidad absoluta de la partícula del sólido (Pi).
Pi dm
x
x’
O
G y
y’
z
z’
irr
Grr
i'rr
Gvr
aiG vvrr
=
ivr
rivr
Fig. 3.1 – Velocidad relativa y de arrastre de una partícula respecto de un sistema de referencia solidario al
c.d.m. y con movimiento de traslación.
descomposición en velocidad relativa más
arrastre
Como la velocidad absoluta de una partícula ( ivr
) se puede poner como suma de la componente relativa
( rivr
) más la de arrastre ( aivr
) respecto del sistema de referencia solidario al c.d.m. y con movimiento de

3. Momento angular de un sólido rígido respecto de su centro de masas.
- 11/105 -
traslación (Gx’y’z’) se tiene
aG/Pi
rG/PiGi vvvv
rrrr++=
luego
( ) ( )( )( ) ( ) ( )∫∫∫
∫∫
×+×+×=
=++×=×=
m
aG/Pii
m
rG/Pii
mGi
m
aG/Pi
rG/PiGi
miiG
v dm 'rv dm 'rv dm 'r
vvv dm 'rv dm 'rH
rrrrrr
rrrrrrr
velocidad relativa de rotación y arrastre de
traslación
En este caso el movimiento relativo solo puede ser debido a la rotación del sólido respecto de estos ejes, mientras que el de arrastre corresponde al de traslación, que es invariante del sólido. Esto se puede apreciar mejor si la velocidad del punto Pi se reduce al c.d.m. del sólido (G) y se descompone el movimiento en relativo más arrastre
( ) ( )⎪⎩
⎪⎨⎧
=
−×=⇒−×+=++=
0v
GPvGPvvvvv
ai
iri
iGa
G/Pir
G/PiGi rr
rrrrrrrr ω
ω
Concepto clave El movimiento relativo de un sólido respecto de un sistema de referencia solidario a un punto de dicho sólido con movimiento de traslación solo puede ser de rotación.
con lo que sustituyendo la velocidad en el momento angular
( ) ( )∫∫ ×+×=m
Gim
riiG v dm 'rv dm 'rH
rrrrr
como la velocidad de arrastre, que coincide con la del c.d.m. ( Gvr
), es la misma para todos los puntos del sólido, puede salir fuera de la integral, y como el dm es un escalar, puede pasar a multiplicar al primer término del producto vectorial, con lo que queda
( ) ( ) Gm
im
Gi v dm'rv dm 'rrrrr
×=× ∫∫
donde esa primera integral corresponde al momento estático del sólido ( Gmr
) respecto del c.d.m. (G), que por definición es nulo, luego
( ) ( ) 0vmv dm'r0m dm'r GGGm
iGm
i
rrrrrrrr=×=×⇒== ∫∫
Concepto clave El momento estático respecto del centro de masas es nulo.
igualdad de momento angular
Llegando entonces a la conclusión de que
( ) ( )( ) ( ) r
Gm
riiG
m
aii
m
aii
m
riiG
Hv dm 'rH0v dm 'r
v dm 'rv dm 'rHrrrr
rrr
rrrrr
=×=⇒
⎪⎪⎭
⎪⎪⎬
⎫
=×
×+×=
∫∫
∫∫

3. Momento angular de un sólido rígido respecto de su centro de masas.
- 12/105 -
por lo que el momento angular ( GHr
) del sólido rígido se puede calcular a partir de la cantidad de
movimiento lineal absoluto de las partículas del sólido ( ivdm r
), considerando la velocidad lineal absoluta
de sus partículas ( ivr
)
( )∫ ×=m
iiG v dm 'rHrrr
o a partir de la cantidad de movimiento lineal relativa de las partículas del sólido ( rivdm r
), considerando la
velocidad lineal relativa ( rivr
) respecto del sistema de referencia solidario al c.d.m. del sólido Gx’y’z’, sistema afectado únicamente por el movimiento de traslación
( )∫ ×=m
rii
rG v dm 'rH
rrr
de forma que
rGG HHrr
=
Concepto clave
El momento angular respecto del centro de masas de un sólido es el mismo considerando la velocidad absoluta ( GH
r) y la velocidad relativa respecto de un sistema de referencia
solidario al centro de masas con movimiento de traslación ( rGHr
).
caso de punto arbitrario
Si el sistema de referencia no hubiera sido solidario al c.d.m. (G) sino a un punto arbitrario (O), la relación entre el momento angular considerando la velocidad absoluta ( OH
r) y la velocidad relativa respecto de un
sistema de referencia solidario al punto con movimiento de traslación ( rOHr
) es
( ) ( ) ( )( ) ( )
( )( )
OOrOO
m
aii
m
rO
rii
OOOm
im
Oi
m
aii
m
rii
mOiO
vmHH
0v dm 'r
Hv dm 'r
vmv dm'rv dm 'r
v dm 'rv dm 'rv dm 'rH
rrrr
rrr
rrr
rrrrrr
rrrrrrr
×+=⇒
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
=×
=×
×=×=×
×+×+×=
∫
∫
∫∫
∫∫∫
en la que Omr
es el momento estático no nulo del sólido respecto del punto O.
derivada del momento angular
Si la expresión del momento angular respecto del c.d.m. expresada mediante la velocidad relativa ( rGHr
) se deriva respecto del tiempo se obtiene
( ) ∫∫∫ ⎟⎠⎞
⎜⎝⎛ ×+⎟
⎠⎞
⎜⎝⎛ ×=⎥
⎦
⎤⎢⎣
⎡×=
m
rii
m
rii
m
rii
rG v dm 'rv dm 'rv dm 'r
dtdH
&rrr&rrr&r
analizando el primer sumando, como la derivada respecto del tiempo del vector de posición relativo ( 'r&r
) es la velocidad relativa ( r
ivr
), el producto vectorial es nulo

3. Momento angular de un sólido rígido respecto de su centro de masas.
- 13/105 -
( ) 0v dm v
v'r
v dm 'r
m
ri
ri
rii
m
rii rrr
r&r
r&r
=×⇒⎪⎭
⎪⎬
⎫
=
⎟⎠⎞
⎜⎝⎛ ×
∫∫
mientras que la derivada de la velocidad relativa respecto del tiempo es la aceleración relativa ( ri
ri av
r&r= ),
por lo que la derivada respecto del tiempo del momento angular ( rGH&r
) respecto del c.d.m. (G) es
( )∫∫
∫∫
×=⇒
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
=
=⎟⎠⎞
⎜⎝⎛ ×
⎟⎠⎞
⎜⎝⎛ ×+⎟
⎠⎞
⎜⎝⎛ ×=
m
rii
rG
ri
ri
m
rii
m
rii
m
rii
rG
a dm 'rH
av
0v dm 'r
v dm 'rv dm 'rH
rr&r
r&r
rr&r
&rrr&r&r
componentes de las aceleración
La aceleración relativa de cada partícula ( riar
) se pone en función de la descomposición del movimiento en relativo más arrastre, y viene expresada por
( )[ ] ( ) cii
ai
aariGi aGPGPaaa
rrrrrrr+−×+−××++= αωω
siendo,
iar
- aceleración absoluta de cada punto (Pi) del sólido.
Gar
- aceleración absoluta del c.d.m. del sólido.
riar
- aceleración relativa de cada punto (Pi) del sólido.
( )[ ] ( )GPGP ia
iaa −×+−×× αωω
rrr - aceleración de arrastre de cada punto (Pi) del sólido, nula al
no haber ni velocidad ni aceleración angular de arrastre.
ciar
- aceleración de Coriolis de cada punto (Pi) del sólido, que en este caso es nula, por no existir
velocidad angular de arrastre ( 0arr
=ω ).
aceleración relativa Luego la aceleración relativa de cada partícula viene expresada por
( )[ ] ( )( )[ ] ( ) Gi
ri
ci
ia
iaa
cii
ai
aaGi
ri
aaa
0a
0GPGP
aGPGPaaarrr
rr
rrrr
rrrrrrr
−=⇒
⎪⎪⎭
⎪⎪⎬
⎫
=
=−×+−××
−−×−−××−−=
αωω
αωω
por lo que sustituyendo en la expresión de la derivada respecto del tiempo del momento angular ( G'H&r
) respecto del c.d.m. (G) queda
( ) ( )[ ] ( ) ( )∫∫∫∫
×−×=−×=⇒⎪⎭
⎪⎬
⎫
−=
×=
mGi
mii
mGii
rG
Giri
m
rii
rG
a dm 'ra dm 'raa dm 'rH
aaa
a dm 'rH rrrrrrr&r
rrr
rr&r

3. Momento angular de un sólido rígido respecto de su centro de masas.
- 14/105 -
teniendo en cuenta que la aceleración del c.d.m. ( Gar
) es constante, puede salir fuera de la integral, y al ser dm un escalar puede pasa a multiplicar al primer término del producto vectorial, con lo que queda
( ) ( ) Gm
im
Gi a dm'ra dm 'rrrrr
×=× ∫∫
momento estático respecto del c.d.m.
donde esa integral corresponde nuevamente al momento estático respecto del c.d.m. ( Gmr
), que por definición es nulo, luego
( ) ( )
( )( ) ( ) 0ama dm'ra dm 'r
0m dm'r
a dm'ra dm 'r
GGGm
im
GiG
mi
Gm
im
Gi rrrrrrrrrr
rrrr
=×=×=×⇒
⎪⎪⎭
⎪⎪⎬
⎫
==
×=×
∫∫∫
∫∫
con lo que la derivada respecto del tiempo del momento angular ( G'H&r
) respecto del c.d.m. (G) queda
( ) ( )( )
( )∫∫
∫∫×=⇒
⎪⎪⎭
⎪⎪⎬
⎫
=×
×−×=
mii
rG
mGi
mGi
mii
rG
a dm 'rH0a dm 'r
a dm 'ra dm 'rHrr&r
rrr
rrrr&r
expresión que coincide con
( )∫ ×=m
iiG a dm 'rHrr&r
igualdad de la derivada del momento angular respecto del tiempo y
del centro de masas
Luego para el cálculo de la derivada respecto del tiempo del momento angular respecto del c.d.m. de un
sólido ( GH&r
) asociado a un sistema de referencia solidario con dicho c.d.m. con movimiento de traslación,
los resultados no varían si se utiliza la aceleración absoluta ( iar
) o relativa ( riar
)
rGG HH&r&r
=
Concepto clave
La derivada del momento angular respecto del centro de masas respecto del tiempo de un
sólido es la misma considerando la aceleración absoluta ( GH&r
) que la aceleración relativa respecto de un sistema de referencia solidario al centro de masas con movimiento de
traslación ( rGH&r
).
Aplicando esta igualdad a la relación entre la derivada del momento angular respecto del tiempo y respecto
del c.d.m. ( GH&r
), y el momento de las fuerzas exteriores respecto de dicho punto ( GMr
), se tiene
rGGG
rGG
GG HHMHH
HM &r&rr
&r&r
&rr
==⇒⎪⎭
⎪⎬
⎫
=
=
caso de punto arbitrario
Si el sistema de referencia no hubiera sido solidario al c.d.m. (G) sino a un punto arbitrario (O), la relación

3. Momento angular de un sólido rígido respecto de su centro de masas.
- 15/105 -
entre la derivada respecto del tiempo del momento angular considerando la velocidad absoluta ( OH&r
) y la
velocidad relativa ( rOH&r
) es
( ) ( )
( )( ) ( )
OOrOO
OOOm
im
Oi
Om
ii
mOi
mii
rO
a mHH
a ma dm'ra dm 'r
Ha dm 'r
a dm 'ra dm 'rH
rr&r&r
rrrrrr
&rrr
rrrr&r
×+=⇒
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
×=×=×
=×
×−×=
∫∫
∫
∫∫
en la que Omr
es el momento estático no nulo del sólido respecto del punto O.

4. Relación entre el momento angular y la velocidad angular de un sólido rígido.
- 16/105 -
4. Relación entre el momento angular y la velocidad angular de un sólido rígido.
Capacidades a desarrollar en el aprendizaje
Desarrollar el momento angular respecto del centro de masas en un sistema de referencia solidario a dicho punto y con movimiento de traslación.
Identificar las integrales con las características geométricas de un sólido rígido. Analizar el momento angular en base principal de inercia. Analizar cuando el momento angular respecto del centro de masas y la velocidad angular del sólido son
vectores paralelos.
La expresión del momento angular ( rGHr
) respecto del c.d.m. (G) de un sólido rígido considerando un sistema de ejes Gx’y’z’ que tienen movimiento de traslación es, como ya se ha indicado anteriormente
( )∫ ×=m
rii
rG v dm 'rH
rrr
siendo
i'rr
- vector de posición de la partícula Pi respecto del c.d.m. (G) del sólido.
rivr
- velocidad relativa de la partícula Pi.
dm - masa asociada al entorno de la partícula Pi.
sin embargo esta expresión no es fácil de integrar, por lo que se va a desarrollar para obtener un término de aplicación más directa. Partiendo de la expresión que relaciona la velocidad de dos puntos pertenecientes a un sólido rígido (Pi, G), como la velocidad angular de arrastre es nula ( 0a
rr=ω ) se tiene
( )( )
riGi
ia
iar
iGi vvv0GP
GPvvv rrrrr
rrrr
+=⇒⎪⎭
⎪⎬⎫
=−×
−×++=
ω
ω
velocidad relativa de rotación
en la que la velocidad relativa del punto Pi ( rivr
) sólo tiene componente de rotación
irr
i 'rvrrr
×= ω
siendo rωr
el vector velocidad angular relativa del sólido que coincide con su velocidad angular total ωr
.
Concepto clave La velocidad relativa de un sólido respecto de un sistema de referencia solidario al centro de masas con movimiento de traslación solo puede corresponder a una rotación.
Sustituyendo en la expresión del momento angular ( rGHr
), se obtiene

4. Relación entre el momento angular y la velocidad angular de un sólido rígido.
- 17/105 -
( )( )[ ]∫
∫××=⇒
⎪⎭
⎪⎬
⎫
×=
×=
mi
rG
iri
m
rii
rG
'r dm 'rH'rv
v dm 'rH rrrr
rrr
rrr
ωω
doble producto vectorial
Si se desarrolla el doble producto vectorial considerando x’, y’ ,z’ las componentes de 'rr
y ωx’, ωy’, ωz’ las componentes de ω
r en el sistema de referencia Gx’y’z’ solidario al c.d.m. y con movimiento de traslación,
se tendrá
( )( )( ) ⎪
⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
×
××
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−−
==×
'zi
'yi
'xi
i'yi'x
i'xi'z
i'zi'y
iii
'z'y'xi
'r'r'r
'x'y'z'x'y'z
'z'y'x
'k'j'i'r
rr
rr
rrrrr
rr
ωωω
ωωωωωω
ωωωω
( )( ) ( ) ( )
( ) ( )( ) ( )( ) ( )
dm'r'y'r'x'r'x'r'z'r'z'r'y
dm'r'r'r
'z'y'x'k'j'i
'r dm 'r
'xii'yii
'zii'xii
'yii'zii
'zi'yi'xi
iiiii⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
×−××−×
×−×
=×××
=××rrrr
rrrr
rrrr
rrrrrr
rrr
rrr
ωωωωωω
ωωωω
o bien desarrollando
( )( ) ( )( ) ( )( ) ( )
( ) ( )( ) ( )( ) ( )
( )( )
( )dm
'z'y'z'y'z'x'z'y'z'x'y'x
'z'x'y'x'z'y
dm'y'z'y'z'x'x'x'y'x'y'z'z'z'x'z'x'y'y
dm'r'y'r'x'r'x'r'z'r'z'r'y
'r dm 'r
2i
2i'zii'yii'x
ii'z2
i2
i'yii'x
ii'zii'y2
i2
i'x
i'zi'yii'xi'zi
i'yi'xii'zi'yi
i'xi'zii'yi'xi
'xii'yii
'zii'xii
'yii'zii
ii
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
++−−
−++−
−−+
=
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−−−−−−−−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
×−××−×
×−×
=××
ωωωωωω
ωωω
ωωωωωωωωωωωω
ωωωωωω
ωrrrr
rrrr
rrrr
rrr
Expresión que integrada respecto de la masa permite determinar el momento angular
( )[ ]( )
( )( )
dm'y'x'z'y'z'x
'z'y'z'x'y'x'z'x'y'x'z'y
'r dm 'rHm 2
i2
i'zii'yii'x
ii'z2
i2
i'yii'x
ii'zii'y2
i2
i'x
mii
rG ∫∫
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
++−−
−++−
−−+
=××=
ωωωωωω
ωωωω
rrrr
velocidad angular como invariante del sólido
Como la velocidad angular (ωr
) es la misma para todos los puntos del sólido (Pi), puede salir fuera de la integral en cada uno de los sumandos, y la expresión queda
( )[ ]( )
( )( )
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
++−−
−++−
−−+
=××=
∫∫∫
∫∫∫
∫∫∫
∫
m
2i
2i'z
mii'y
mii'x
mii'z
m
2i
2i'y
mii'x
mii'z
mii'y
m
2i
2i'x
mii
rG
dm'y'xdm'z'ydm'z'x
dm'z'ydm'z'xdm'y'x
dm'z'xdm'y'xdm'z'y
'r dm 'rH
ωωω
ωωω
ωωω
ωrrrr
identificación de las integrales
en la que el desarrollo de cada una de las integrales corresponde al momento de inercia respecto de los ejes y los centrífugos en el sistema de referencia solidario al c.d.m. (G) y con movimiento de traslación
( ) ( ) ( )∫∫∫
∫∫∫===
+=+=+=
mii'z'y
mii'z'x
mii'y'x
m
2i
2i'z
m
2i
2i'y
m
2i
2i'x
dm'z'yIdm'z'xIdm'y'xI
dm'y'xIdm'z'xIdm'z'yI
GGG
GGG

4. Relación entre el momento angular y la velocidad angular de un sólido rígido.
- 18/105 -
por lo que las componentes del momento angular del sólido definido en función de la velocidad relativa ( r
GH ) respecto de su c.d.m. G y respecto de un sistema de referencia Gx’y’z’ con movimiento de traslación son
( )[ ]⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+−−−+−
−−=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
⇒××= ∫GGG
GGG
GGG
G
G
G
'z'z'z'y'y'z'x'x
'z'y'z'y'y'y'x'x
'z'x'z'y'x'y'x'x
'z
'y
'x
miiG
IIIIII
III
H
H
H
'r dm 'rHωωω
ωωωωωω
ωrrrr
tensor de inercia másico
que coincide con el desarrollo del producto del tensor de inercia másico asociado al c.d.m. ( [ ]GT ) multiplicado por el vector velocidad angular del sólido ({ }ω )
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−−−−
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
'z
'y
'x
'z'z'y'z'x
'z'y'y'y'x
'z'x'y'x'x
'z
'y
'x
GGG
GGG
GGG
G
G
G
IIIIIIIII
H
H
H
ω
ωω
{ } [ ] { }ωGG TH =
donde el término
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−−−−
=
GGG
GGG
GGG
'z'z'y'z'x
'z'y'y'y'x
'z'x'y'x'x
G
IIIIIIIII
T
es el tensor de inercia másico del sólido ( [ ]GT ) respecto a su c.d.m. (G) en la base x’y’z’.
Concepto clave El momento angular de un sólido respecto de un sistema de referencia solidario a su centro de masas con movimiento de traslación se obtiene multiplicando el tensor de inercia másico asociado al centro de masas por la velocidad angular del sólido.
tensor principal de inercia másico
Para un sistema de ejes principales de inercia Ge1e2e3, el tensor de inercia ( [ ] pGT ) está formado solo por
los momentos de inercia respecto de los ejes, luego su expresión será
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
3
2
1
Gp
I000I000I
T
de forma que las componentes del momento angular ( { }GH ) del sólido respecto a ejes principales de inercia (e1, e2, e3) que pasan por el c.d.m. (G) con movimiento de traslación, quedan reducidos a
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
33
22
11
3
2
1
3
2
1
3
2
1
III
I000I000I
H
H
H
G
G
G
ωωω
ωωω

4. Relación entre el momento angular y la velocidad angular de un sólido rígido.
- 19/105 -
x
3er
O
G
y
z
1er
2er
GHr
ωr
Fig. 4.1 – Momento y velocidad angular en base principal de inercia solidaria al c.d.m. y con movimiento
de traslación.
paralelismo entre momento y velocidad
angular
En general los vectores momento angular respecto del c.d.m. y velocidad angular ( GHr
y ωr
) tendrán direcciones diferentes (Fig. 4.1), sin embargo existen dos excepciones:
igualdad de momentos principales de inercia
La primera es cuando los tres momentos principales de inercia (I1, I2, I3) son iguales entre si. En este caso las componentes del momento angular (
GGG 321 H,H,H ) son proporcionales a las componentes de la
velocidad angular (ω1, ω2, ω3) de forma que ambos vectores ( GHr
y ωr
) son paralelos (Fig. 4.2)
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
3
2
1
1
31
21
11
3
2
1
1
1
1
3
2
1
IIII
I000I000I
H
H
H
G
G
G
ωωω
ωωω
ωωω
x
O
G
y
z
1er
2er
GHr
ωr
3er
Fig. 4.2 – Momento y velocidad angular paralelos por momento de inercia principales iguales.
velocidad con única componente en base
principal
La segunda excepción es cuando el vector velocidad angular (ωr
) tiene una única componente en la base principal de inercia (Fig. 4.3)
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
00
I
00
I000I000I
H
H
H 111
3
2
1
3
2
1
G
G
G ωω

4. Relación entre el momento angular y la velocidad angular de un sólido rígido.
- 20/105 -
x
O
G
y
z
1er
2er
GHr
ωr
3er
Fig. 4.3 – Momento y velocidad angular paralelos por ser colineales con un eje principal de inercia.
Concepto clave El momento angular de un sólido respecto del centro de masas es paralelo a la velocidad angular del sólido cuando los momentos de inercia principales del sólido son iguales entre sí, o cuando la velocidad angular del sólido tiene la dirección de un eje principal de inercia.
Ejemplo 4.1: El sólido del ejemplo 3.2 del tema de Cinemática del sólido rígido correspondiente a un cilindro homogéneo de masa m=10 kg., radio R=10 cm. y altura H=50 cm. cuyo centro de masas se encuentra en el punto M de componentes {3, 2, 7} (m), orientado tal como muestra la figura. Determinar la cantidad de movimiento lineal y el momento angular respecto del centro de masas G del cilindro.
G=M
x
O y
z
xG
yG
zG
Ejemplo 3.2: Un sólido rígido está sometido a tres rotaciones simultáneas cuyas velocidades angulares son ω1 = 5, ω2 = 8, ω3 = 2 (en rad/s) respecto de unos ejes concurrentes en el origen del sistema de referencia cuyos unitarios vienen definidos por =1e
r{1, 0, 0}, =2e
r{0, 1, 0} y =3e
r{0, 0, 1} respectivamente. Determinar la
velocidad del punto M del sólido de coordenadas M = {3, 2, 7}.
La cantidad de movimiento lineal y el momento angular respecto del centro de masas se obtienen con las expresiones
mvL Grr
= { } [ ] { }ωGG TH =
en las que los valores de la velocidad lineal del centro de masas y velocidad angular del sólido se han obtenido en los problemas anteriores, y son:
( )s/m1429
52vv GM
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−==
rr [ ] ( )s/rad
285
n
1ii
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧== ∑
=ωωrr
Las características geométricas del cilindro en la base de estudio son:
2yG mR
21I = ( )22
zGxG LR3m121II +==

4. Relación entre el momento angular y la velocidad angular de un sólido rígido.
- 21/105 -
que aplicadas al sólido
( )222yG mkg05,01,010
21mR
21I =⋅==
( ) ( ) ( )22222zGxG mkg233,05,01,0310
121LR3m
121II =+⋅=+==
luego el tensor de inercia másico respecto del centro de masas en la base de estudio es
[ ] ( )22pG mkg10
3,2300050003,23
T −
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
por lo que la cantidad de momento lineal queda
⎟⎠⎞
⎜⎝⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−=⋅
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−==
smkg
140290
52010
1429
52 mvL G
rr
y la cantidad de movimiento angular respecto del centro de masas es
{ } [ ] { } ⎟⎟⎠
⎞⎜⎜⎝
⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡== −
smkg
47,04,0
17,1
285
103,2300
050003,23
TH2
2GG ω

5. Reducción del estudio cinético de un sólido rígido a su centro de masas.
- 22/105 -
5. Reducción del estudio cinético de un sólido rígido a su centro de masas.
Capacidades a desarrollar en el aprendizaje
Reducir el comportamiento dinámico de un sólido a su centro de masas mediante la cantidad de movimiento lineal y el momento angular.
Determinar el momento angular respecto de un punto distinto del centro de masas. Determinar el momento angular respecto de un punto fijo.
Como ya se indicó anteriormente, cada punto de un sólido rígido (Pi) al cual va asociado un entorno de masa dm y una velocidad ( iv
r) genera un momento lineal infinitesimal ( iLd
r, Fig. 5.1)
Pi
dm
ivr
G
iLdr
Fig. 5.1 – Cantidad de movimiento lineal y velocidad del entorno de un punto.
cantidad de movimiento lineal
Al integrar la cantidad de movimiento lineal asociado a cada uno de los puntos del sólido se tiene como resultante el momento lineal ( L
r)
mvLdmvLd Gm
iL
irrrr
r=⇒= ∫∫
momento angular y un momento angular ( { }GH ) respecto del c.d.m. (G) que expresado en función de un sistema de referencia solidario al c.d.m. con movimiento de traslación G (x’y’z’) respecto de un sistema de referencia inercial, tiene la expresión
{ } [ ] { }ωGG TH =
Luego la reducción dinámica de un sólido rígido respecto de su c.d.m. (G) viene expresada por la cantidad de movimiento lineal ( L
r) y el momento angular respecto de su c.d.m. ( GH
r, Fig. 5.2)
GHr
G Lr
Fig. 5.2 – Reducción dinámica en el c.d.m. de un sólido.

5. Reducción del estudio cinético de un sólido rígido a su centro de masas.
- 23/105 -
Concepto clave La reducción dinámica de un sólido en su centro de masas es la cantidad de movimiento lineal y el momento angular.
momento angular respecto de un punto
distinto del c.d.m.
Para la determinación del momento angular respecto de un punto Q ( QHr
) perteneciente o no al sólido y distinto del c.d.m. (G) se parte de la definición del momento angular aplicado a dicho punto
( )∫ ×=m
iQQ vdmrHrrr
Pi dm
G
Q
i'rr
Qrr
QGr −r
ivr
QHrGH
r
Fig. 5.3 – Momento angular respecto de un punto Q distinto del c.d.m. del un sólido.
en la que, teniendo en cuenta que (Fig. 5.3)
G-QiQ r'rrrrr
+=
se obtiene
( )[ ] ( ) ( )∫∫∫ ×+×=×+= −−m
iQGm
iim
iQGiQ vdmrvdm'rvdmr'rHrrrrrrrr
el primer sumando es el momento angular ( GHr
) respecto del c.d.m., mientras que en el segundo sumando el vector G-Qr
r corresponde a la posición relativa entre dos puntos definidos, por lo que puede salir de la
integral, con lo que teniendo en cuenta que la integral que queda es el producto de la masa de sólido por la velocidad del c.d.m. se tiene
( ) ( )
( )( ) ( )
( )
GQGGQ
Gm
i
miQG
miQG
miiG
miQG
miiQ
vmrHH
vmvdm
vdmrvdmr
vdm'rH
vdmrvdm'rH
rrrr
rr
rrrr
rrr
rrrrr
×+=⇒
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
=
×=×
×=
×+×=
−
−−
−
∫
∫∫
∫
∫∫
Concepto clave El momento angular respecto de un punto arbitrario Q se puede obtener a partir del momento angular respecto del centro de masas más el producto vectorial del vector de posición relativa multiplicado por la cantidad de movimiento lineal.

5. Reducción del estudio cinético de un sólido rígido a su centro de masas.
- 24/105 -
Ejemplo 5.1: Para el sólido del ejemplo 4.1 basado en el ejemplo 3.2 del tema de Cinemática del sólido rígido correspondiente a un cilindro homogéneo de masa m=10 kg., radio R=10 cm. y altura H=50 cm. cuyo centro de masas se encuentra en el punto M de componentes {3, 2, 7} (m), orientado tal como muestra la figura, determinar la cantidad de movimiento lineal y el momento angular respecto del origen del sistema de coordenadas O.
G=M
x
O y
z
xG
yG
zG
Ejemplo 3.2: Un sólido rígido está sometido a tres rotaciones simultáneas cuyas velocidades angulares son ω1 = 5, ω2 = 8, ω3 = 2 (en rad/s) respecto de unos ejes concurrentes en el origen del sistema de referencia cuyos unitarios vienen definidos por =1e
r{1, 0, 0}, =2e
r{0, 1, 0} y =3e
r{0, 0, 1} respectivamente. Determinar la
velocidad del punto M del sólido de coordenadas M = {3, 2, 7}.
La cantidad de movimiento lineal y el momento angular respecto del punto O se obtienen con las expresiones
mvL Grr
= GOGGO vmrHHrrrr
×+= −
La cantidad de movimiento lineal es una característica del sólido luego no varía de un punto a otro
⎟⎠⎞
⎜⎝⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−=⋅
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−==
smkg
140290
52010
1429
52 mvL G
rr
mientras que el momento angular respecto del centro de masas, la velocidad lineal del centro de masas y la posición de G respecto de O se obtuvieron en el ejemplo anterior y son:
{ } ⎟⎟⎠
⎞⎜⎜⎝
⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
smkg
47,04,0
17,1H
2
G ( )s/m1429
52vG
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−=
r [ ] ( )s/rad
285
n
1ii
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧== ∑
=ωωrr
{ } ( )m723
OG⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=−
luego desarrollando el segundo término de la expresión del momento angular se tiene
⎟⎟⎠
⎞⎜⎜⎝
⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−=
−−=×− s
mkg1910
40601750
140290520723kji
vmr2
GOG
rrr
rr
y el momento angular respecto del punto O es
⎟⎟⎠
⎞⎜⎜⎝
⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−+
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=×+= − s
mkg47,19104,4060
17,1751
191040601750
47,04,0
17,1vmrHH
2
GOGGOrrrr

5.1 Momento angular de un sólido rígido restringido a girar alrededor de un punto fijo.
- 25/105 -
5.1. Momento angular de un sólido rígido restringido a girar alrededor de un punto fijo.
En el caso particular de que el movimiento del sólido rígido esté limitado a girar alrededor de un punto fijo (Q), se pueden utilizar dos procedimientos para determinar el momento angular del sólido ( QH
r) respecto
de dicho punto.
Utilizando el método anterior, se puede calcular primero el momento angular respecto del c.d.m. ( GHr
) y
posteriormente el del punto indicado ( QHr
)
GQGGQ vmrHHrrrr
×+= −
velocidad absoluta de rotación
o bien directamente a partir de la velocidad angular del sólido (ωr
) debido a su movimiento respecto del sistema fijo Qxyz. Como el sólido está restringido a girar respecto del punto fijo Q la velocidad de cualquiera de sus puntos ( iv
r) solo puede ser debida a una rotación (Fig. 5.4) y viene expresada por
iiQ
iQi'rv
0v
'rvv rrrr
rrrr
×=⇒⎪⎭
⎪⎬⎫
=
×+=ω
ω
Pi dm
x
Q y
z
i'rr
ii 'rvrrr
×= ω
Fig. 5.4 – Velocidad absoluta de rotación de un punto Pi de un sólido respecto de otro punto fijo Q.
Sustituyendo en la expresión del momento angular ( QHr
) se obtiene
( )( )[ ]∫
∫××=⇒
⎪⎭
⎪⎬
⎫
×=
×=
miiQ
ii
miiQ
'r dm 'rH'rv
v dm 'rH rrrr
rrr
rrr
ωω
a partir de este doble producto vectorial, desarrollando de la misma forma que para el cálculo del momento angular respecto del c.d.m. ( GH
r) se tiene
{ } [ ] { }ωQQ TH =
o en componentes

5.1 Momento angular de un sólido rígido restringido a girar alrededor de un punto fijo.
- 26/105 -
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−−−−
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
z
y
x
zyzxz
yzyxy
xzxyx
z
y
x
QQQ
QQQ
QQQ
Q
Q
Q
IIIIIIIII
H
H
H
ω
ωω
Concepto clave El momento angular respecto de un punto Q fijo del sólido se obtiene multiplicando el tensor de inercia másico asociado al punto fijo por la velocidad anular del sólido.
Ejemplo 5.2: Para el sólido del ejemplo 4.1 basado en el ejemplo 3.2 del tema de Cinemática del sólido rígido correspondiente a un cilindro homogéneo de masa m=10 kg., radio R=10 cm. y altura H=50 cm. cuyo centro de masas se encuentra en el punto M de componentes {3, 2, 7} (m), orientado tal como muestra la figura, determinar el momento angular respecto del origen del sistema de coordenadas O considerado como punto fijo del sólido.
G=M
x
O y
z
xG
yG
zG
Ejemplo 3.2: Un sólido rígido está sometido a tres rotaciones simultáneas cuyas velocidades angulares son ω1 = 5, ω2 = 8, ω3 = 2 (en rad/s) respecto de unos ejes concurrentes en el origen del sistema de referencia cuyos unitarios vienen definidos por =1e
r{1, 0, 0}, =2e
r{0, 1, 0} y =3e
r{0, 0, 1} respectivamente. Determinar la
velocidad del punto M del sólido de coordenadas M = {3, 2, 7}.
El origen del sistema de referencia O no es un punto que pertenezca al sólido, pero si se prolongara el sólido hasta ese punto, su velocidad sería nula (no por estar el sólido vinculado en ese punto, sino por pertenecer a los distintos ejes de rotación), por lo que el momento angular respecto del punto O se obtiene con la expresión
{ } [ ] { }ωOO TH =
Las velocidad angular y las características geométricas de momentos de inercia respecto del centro de masas son
[ ] ( )s/rad285
n
1ii
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧== ∑
=ωωrr
( )2yG mkg05,0I = ( )2
zGxG mkg233,0II ==
por lo que hay que trasladarlas por Steiner al punto O de forma que 2
xxxx GGmdII −+= 2
yyyy GGmdII −+= 2
xzzz GGmdII −+=
GGGGG Gzy,yOzGzx,xOzxyxy dmdII += GGGGG Gyz,zOyGyx,xOyxzxz dmdII +=
GGGGG Gzy,yOzGzx,xOzyzyz dmdII +=
en las que sustituyendo valores
( ) ( )2222xxxx mkg233,5307210233,0mdII
GG=+⋅+=+= −
( ) ( )2222yyyy mkg05,580731005,0mdII
GG=+⋅+=+= −
( ) ( )2222xzzz mkg233,1302310233,0mdII
GG=+⋅+=+= −

5.1 Momento angular de un sólido rígido restringido a girar alrededor de un punto fijo.
- 27/105 -
( )2Gzy,yOzGzx,xOzxyxy mkg6032100dmdII
GGGGG=⋅⋅+=+=
( )2Gyz,zOyGyx,xOyxzxz mkg21037100dmdII
GGGGG=⋅⋅+=+=
( )2Gzx,xOzGyx,xOyyzyz mkg14037100dmdII
GGGGG=⋅⋅+=+=
luego el tensor de inercia asociado al punto O es
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−−−−
=233,130140210
14005,5806021060233,530
T O
por lo que el momento angular del momento O es
{ } ⎟⎠⎞
⎜⎝⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−−−−
=smkg
53,19094,4060
17,1751
285
233,13014021014005,5806021060233,530
H O
que coincide con la solución del problema anterior.

6. Aplicación de los principios del impulso lineal y angular al movimiento de un sólido rígido.
- 28/105 -
6. Aplicación de los principios del impulso lineal y angular al movimiento de un sólido rígido.
Capacidades a desarrollar en el aprendizaje
Determinar las expresiones del impulso lineal y angular respecto del centro de masas.
impulso lineal y angular respecto del
centro de masas
Si se tiene un sólido rígido en movimiento debido a la actuación en su entorno de fuerzas exteriores con resultante ∑ iF
r, recordando los principios de impulso lineal y angular respecto del c.d.m. para el sólido
rígido se puede poner
12
t
ti
L
L
t
tiii LLdtF Ld dtF LddtF
dtLdF
2
1
2
1
2
1
rrrrrrrr
rr
r−=⇒=⇒=⇒= ∫ ∑∫∫ ∑∑∑
12
2G
1G
2
1
GG
2
1G
H
HG
t
tGGG
GG HHdtM HddtM HddtM
dtHdM
rrrrrrrr
rr
r−=⇒=⇒=⇒= ∫∫∫
Las dos expresiones indican que tanto el impulso lineal como el angular definen la variación de la cantidad de movimiento lineal ( L
r) y del momento angular ( GH
r) respecto del c.d.m. (G) del sólido rígido,
respectivamente, entre los instantes t1 y t2 (Fig. 6.1).
G
∫t
dtFr
∫t
G dtMr
=
2GHr
G 2Gvm
r
G
1GHr
1Gvmr
+
Fig. 6.1 – Impulso lineal y angular en el c.d.m. de un sólido.

7. Energía cinética de un sólido rígido en tres dimensiones.
- 29/105 -
7. Energía cinética de un sólido rígido en tres dimensiones.
Capacidades a desarrollar en el aprendizaje
Determinar la expresión de la energía cinética de un sólido, utilizando el centro de masas y un sistema de referencia solidario él y con movimiento de traslación.
Descomponer la energía cinética en componentes asociadas al movimiento del centro de masas y la rotación del sólido.
Relacionar la componente de la energía cinética asociada a la rotación del sólido con el momento angular respecto del centro de masas.
Determinar la expresión de la energía cinética de un sólido con un punto fijo utilizando un sistema de referencia también fijo.
Desarrollar el trabajo debido al os movimientos de traslación y rotación.
energía cinética del entorno de un punto
Si se considera un sólido rígido tridimensional con masa m, de forma que cada partícula (Pi) tiene una velocidad absoluta iv
r, la energía cinética del entorno infinitesimal de la masa es
2ic vdm
21dE
r=
expresión que integrada para todo el sólido permite determinar su energía cinética (Ec)
∫∫∫ =⇒=m
2ic
m
2i
Ec vdm
21Evdm
21dE
c
rr
descomposición de la velocidad
Si se pone la velocidad lineal absoluta ( ivr
) de los puntos del sólido en función de un sistema de referencia solidario al c.d.m. y con movimiento de traslación (Gx’y’z’), la velocidad de cada partícula (Pi) se puede descomponer en velocidad del centro de masas ( Gv
r) más la velocidad relativa ( r
ivr
)
( )( )
riGi
ia
iar
iGi vvv0GP
GPvvv rrrrr
rrrr
+=⇒⎪⎭
⎪⎬⎫
=−×
−×++=
ω
ω
y la energía cinética del sólido (Ec) pasa a ser
( )∫∫
⎥⎦⎤
⎢⎣⎡ +=⇒
⎪⎭
⎪⎬
⎫
+=
=
m
2riGc
riGi
m
2ic
vvdm21E
vvv
vdm21E rr
rrr
r
que desarrollando
( )( ) ( ) ( )
∫∫∫∫
∫
⋅++=⎥⎦⎤
⎢⎣⎡
⎟⎠⎞⎜
⎝⎛ ⋅++=
⇒⎪⎭
⎪⎬
⎫
⋅++=+⋅+=+
⎥⎦⎤
⎢⎣⎡ +=
m
riG
m
2ri
m
2G
m
riG
2ri
2Gc
riG
2ri
2G
riG
riG
2riG
m
2riGc
vvdmvdm21vdm
21vv2vvdm
21E
vv2vvvvvvvv
vvdm21E
rrrrrrrr
rrrrrrrrrr
rr
Como la velocidad del c.d.m. del sólido ( Gvr
) no depende del punto (Pi) de estudio y la velocidad relativa

7. Energía cinética de un sólido rígido en tres dimensiones.
- 30/105 -
( rivr
) corresponde a la rotación respecto del c.d.m. (G) debido a la velocidad angular del sólido (ωr
), la expresión anterior se puede poner
[ ] ( ) ( )[ ]∫∫∫∫∫∫
×⋅+⎥⎦⎤
⎢⎣⎡ ×+=⇒
⎪⎭
⎪⎬
⎫
×=
⋅++=
miG
m
2i
m
2Gc
iri
m
riG
m
2ri
m
2Gc
'rvdm'rdm21vdm
21E
'rv
vvdmvdm21vdm
21E rrrrrr
rrr
rrrr
ωωω
En el primer sumando la velocidad al cuadrado del c.d.m. ( 2Gvr
) sale fuera de la integral al ser constante para todos los puntos del sólido, integrándose el diferencial de masa
[ ] [ ] [ ] 2G
m
2G
2GGG
2G
2G
2G
mm
2G
vm21vdm
21
vvvv
vm21vdm
21vdm
21
=⇒⎪⎭
⎪⎬
⎫
=⋅=
==∫
∫∫ r
rrr
rrr
En el segundo sumando se desarrolla el producto vectorial i'rrr
×ω
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−−
==×
i'yi'x
i'xi'z
i'zi'y
iii
'z'y'xi
'x'y'z'x'y'z
'z'y'x
'k'j'i'r
ωωωωωω
ωωωω
rrr
rr
y su cuadrado ( )2i'r
rr×ω
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )ii'y'x
2i'y
2i'xii'z'x
2i'x
2i'zii'z'y
2i'z
2i'y
2i'yi'x
2i'xi'z
2i'zi'yii
2i
'y'x2'x'y'z'x2'z'x'y'z2'y'z
'x'y'z'x'y'z'r'r'r
ωωωωωωωωωωωω
ωωωωωωωωω
−++−++−+=
=−+−+−=×⋅×=×rrrrrr
Expresiones en las que se puede sacar factor común a los términos 2'z
2'y
2'x ,, ωωω
( ) ( ) ( ) ( ) ( ) ( ) ( )ii'y'xii'z'xii'z'y2
i2
i2'z
2i
2i
2'y
2i
2i
2'x
2i 'y'x2'z'x2'y'z2'y'x'z'x'z'y'r ωωωωωωωωωω −−−+++++=×rr
que sustituido en el segundo sumando queda
( )
( ) ( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( ) ( ) ( )[ ]∫∫
∫
−−−+++++=⎥⎦⎤
⎢⎣⎡ ×
⇒⎪⎭
⎪⎬
⎫
−−−+++++=×
⎥⎦⎤
⎢⎣⎡ ×
mii'y'xii'z'xii'z'y
2i
2i
2'z
2i
2i
2'y
2i
2i
2'x
m
2i
ii'y'xii'z'xii'z'y2
i2
i2'z
2i
2i
2'y
2i
2i
2'x
2i
m
2i
'y'x2'z'x2'y'z2'y'x'z'x'z'ydm21'rdm
21
'y'x2'z'x2'y'z2'y'x'z'x'z'y'r
'rdm21
ωωωωωωωωωω
ωωωωωωωωωω
ω
rr
rr
rr
Expresiones en las que las componentes de la velocidad angular del sólido ( 'z'y'x ,, ωωω ) son constantes para todos los puntos, por lo que pueden salir fuera de la integrales y queda
( ) ( ) ( ) ( )( ) ( ) ( )∫∫∫
∫∫∫∫
−−−
−+++++=⎥⎦⎤
⎢⎣⎡ ×
mii'z'y
mii'z'x
mii'y'x
m
2i
2i
2'z
m
2i
2i
2'y
m
2i
2i
2'x
m
2i
dm'z'ydm'z'xdm'y'x
dm'y'x21dm'z'x
21dm'z'y
21'rdm
21
ωωωωωω
ωωωωrr
identificación de las características
geométricas
donde las integrales corresponden a los momentos de inercia respecto de los ejes y los centrífugos solidarios al c.d.m. del sólido (G) con movimiento de traslación

7. Energía cinética de un sólido rígido en tres dimensiones.
- 31/105 -
( ) ( ) ( )∫∫∫
∫∫∫===
+=+=+=
mii'z'y
mii'z'x
mii'y'x
m
2i
2i'z
m
2i
2i'y
m
2i
2i'x
dm'z'yIdm'z'xIdm'y'xI
dm'y'xIdm'z'xIdm'z'yI
GGG
GGG
por lo que la expresión queda
( )GGGGGG 'z'y'z'y'z'x'z'x'y'x'y'x'z
2'z'y
2'y'x
2'x
m
2i IIII
21I
21I
21'rdm
21 ωωωωωωωωωω −−−++=⎥⎦
⎤⎢⎣⎡ ×∫
rr
que coincide con el desarrollo de
( ) { } { } [ ] { }ωω
ω
ωω
ωωωω Gt
'z
'y
'x
'z'z'y'z'x
'z'y'y'y'x
'z'x'y'x'x
'z'y'xm
2i T
21
IIIIIIIII
21'rdm
21
GGG
GGG
GGG
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−−−−
=⎥⎦⎤
⎢⎣⎡ ×∫
rr
El tercer sumando de la expresión de la energía cinética (Ec) del sólido
( )[ ]∫ ×⋅m
iG 'rvdmrrr
ω
es nulo. Para comprobarlo se intercambian los vectores Gvr
y 'rr
del producto mixto, lo que no varía su
resultado. Como los vectores Gvr
y ωr
son constantes para todos los puntos del sólido, pueden salir fuera de la integral, por lo que queda
( )[ ] ( )[ ] [ ] ( )Gm
im
Gim
iG v'rdmv'rdm'rvdmrrrrrrrrr
×⋅=×⋅=×⋅ ∫∫∫ ωωω
momento estático respecto del c.d.m.
la integral que aparece corresponde al momento estático respecto del c.d.m. ( Gmr
) que, nuevamente, por definición es nulo, luego
( )[ ] ( )[ ] [ ] ( )[ ]
( )[ ] 0'rvdm0m'rdm
v'rdmv'rdm'rvdm
miG
Gm
i
Gm
im
Gim
iG
=×⋅⇒
⎪⎪⎭
⎪⎪⎬
⎫
==
×⋅=×⋅=×⋅
∫∫
∫∫∫rrr
rrr
rrrrrrrrr
ω
ωωω
Finalmente la expresión de la energía cinética ( cE ) buscada, correspondiente al denominado teorema de Koening, es
[ ] ( ) ( )[ ][ ] [ ]
( ) { } [ ] { }
( )[ ] ( )[ ] [ ] ( )
{ } [ ] { }ωω
ωωω
ωωω
ωω
Gt2
Gc
Gm
im
Gim
iG
Gt
m
2i
2G
2G
2G
mm
2G
miG
m
2i
m
2Gc
T21vm
21E
0v'rdmv'rdm'rvdm
T21'rdm
21
vm21vm
21vdm
21vdm
21
'rvdm'rdm21vdm
21E
+=⇒
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
=×⋅=×⋅=×⋅
=⎥⎦⎤
⎢⎣⎡ ×
===
×⋅+⎥⎦⎤
⎢⎣⎡ ×+=
∫∫∫
∫
∫∫
∫∫∫
rrrrrrrrr
rr
rrr
rrrrrr
Concepto clave
El teorema de Koening indica que la energía cinética de un sólido rígido se obtiene a partir de considerar toda la masa del sólido concentrada en el centro de masas, a lo que se suma el producto de la mitad de la velocidad angular transpuesta por el tensor de inercia másico asociado al centro de masas, y nuevamente por la velocidad angular.

7. Energía cinética de un sólido rígido en tres dimensiones.
- 32/105 -
caso de punto arbitrario
Si el sistema de referencia no hubiera sido solidario al c.d.m. (G) sino a un punto arbitrario (O), la expresión de la energía cinética sería
[ ] ( ) ( )[ ][ ] [ ]
( ) { } [ ] { }
( )[ ] [ ] ( ) ( )
{ } [ ] { } ( )OOOt2
Oc
OOOm
im
iO
Ot
m
2i
2O
2O
2O
mm
2O
miO
m
2i
m
2Oc
vmT21vm
21E
vmv'rdm'rvdm
T21'rdm
21
vm21vm
21vdm
21vdm
21
'rvdm'rdm21vdm
21E
rrr
rrrrrrrrr
rr
rrr
rrrrrr
×⋅++=⇒
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
×⋅=×⋅=×⋅
=⎥⎦⎤
⎢⎣⎡ ×
===
×⋅+⎥⎦⎤
⎢⎣⎡ ×+=
∫∫
∫
∫∫
∫∫∫
ωωω
ωωω
ωωω
ωω
en la que Omr
es el momento estático no nulo del sólido respecto del punto O.
En la expresión de la energía cinética respecto del c.d.m.
{ } [ ] { }ωω Gt2
Gc T21vm
21E +=
el primer sumando corresponde a la energía debida al movimiento del c.d.m. (G) del sólido ( GcE ), mientras
que el segundo sumando es la energía debida al movimiento de rotación del sólido respecto del sistema de referencia ( r
cE ).
{ } [ ] { } rc
GcG
t2Gc EET
21vm
21E +=+= ωω
relación entre energía cinética, cantidad de movimiento lineal y
momento angular
Como la cantidad de movimiento lineal ( Lr
) y el momento angular respecto del c.d.m. ({ }GH ) vienen expresado por
{ } [ ] { }ωGGG THvmL ==rr
lo anterior se puede poner
{ } [ ] { }
{ } [ ] { }{ } { }G
tGc
GG
G
Gt
GGc
H21vL
21E
THvmL
T21vvm
21E
⋅+⋅=⇒
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
==
+⋅=
ωω
ωωrrrr
rr
energía cinética debida al movimiento del
c.d.m. y a la rotación
y la energía cinética debida a los movimientos del c.d.m. y de rotación del sólido ( rc
Gc E,E ) se pueden
expresar mediante
{ } { }Gtr
cGGc H
21EvL
21E ⋅=⋅= ω
rr
Concepto clave Si el punto al que se aplica la expresión no es el centro de masas (G) en un sistema de referencia solidario él y con movimiento de traslación (Gxyz), la expresión obtenida para la energía cinética no es válida.

7. Energía cinética de un sólido rígido en tres dimensiones.
- 33/105 -
energía cinética puesta en función de componentes
La energía cinética puesta en función de las componentes de las velocidades lineal del c.d.m. (
GGG 'z'y'x v,v,v ) y angular del sólido ( 'z'y'x ,, ωωω ) es
{ } [ ] { }
( ) ( )GGGGGGGGG 'z'y'z'y'z'x'z'x'y'x'y'x'z
2'z'y
2'y'x
2'x
2'z
2'y
2'x
Gt2
Gc
I2I2I2III21vvvm
21
T21vm
21E
ωωωωωωωωω
ωω
−−−+++++=
=+=
relación entre energía cinética y cantidad de
movimiento lineal
La relación entre la energía cinética (EC) y la cantidad de movimiento lineal ( Lr
) se obtiene al derivar la primera respecto de las componentes de la velocidad del c.d.m.
'z'z'z
c'y'y
'y
c'x'x
'x
c LmvdvdE
LmvdvdE
LmvdvdE
GG
GG
GG
======
luego
'kdvdE
'jdvdE
'idvdE
LGGG 'z
c
'y
c
'x
crrrr
++=
relación entre energía cinética y momento
angular
La relación entre la energía cinética (EC) y el momento angular ( GHr
) se obtiene de derivar la primera respecto de las componentes de la velocidad angular
GGGG
GGGG
GGGG
'z'z'z'z'y'y'z'x'x'z
c
'y'z'y'z'y'y'y'x'x'y
c
'x'z'x'z'y'x'y'x'x'x
c
HIIIddE
HIIIddE
HIIIddE
=+−−=
=−+−=
=−−=
ωωωω
ωωωω
ωωωω
luego
'kddE
'jddE
'iddE
H'z
c
'y
c
'x
cG
rrrr
ωωω++=
Ejemplo 7.1: Para el sólido del ejemplo 4.1 basado en el ejemplo 3.2 del tema de Cinemática del sólido rígido correspondiente a un cilindro homogéneo de masa m=10 kg., radio R=10 cm. y altura H=50 cm. cuyo centro de masas se encuentra en el punto M de componentes {3, 2, 7} (m), orientado tal como muestra la figura, determinar la energía cinética.
G=M
x
O y
z
xG
yG
zG
Ejemplo 3.2: Un sólido rígido está sometido a tres rotaciones simultáneas cuyas velocidades angulares son ω1 = 5, ω2 = 8, ω3 = 2 (en rad/s) respecto de unos ejes concurrentes en el origen del sistema de referencia cuyos

7. Energía cinética de un sólido rígido en tres dimensiones.
- 34/105 -
unitarios vienen definidos por =1er
{1, 0, 0}, =2er
{0, 1, 0} y =3er
{0, 0, 1} respectivamente. Determinar la velocidad del punto M del sólido de coordenadas M = {3, 2, 7}.
Se van a utilizar los datos ya conocidos. La energía cinética se obtienen con la expresión
{ } { }Gt
Gc H21vL
21E ⋅+⋅= ω
rr
La cantidad de movimiento lineal, la velocidad del centro de masas, la velocidad angular del sólido y el momento angular respecto del centro de masas son
⎟⎠⎞
⎜⎝⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−=
smkg
140290
520Lr
⎟⎠⎞
⎜⎝⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−=
sm
1429
52 vG
r ( )s/rad
285
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=ω
r { } ⎟
⎟⎠
⎞⎜⎜⎝
⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
smkg
47,04,0
17,1H
2
G
luego la energía cinética del sólido es
{ } { } { }
( )( ) ( )( )[ ] ( ) ( )J1871051870547,024,0817,1521141402929052520
21
47,04,0
17,1285
21
1429
52
140290
520
21H
21vL
21E G
tGc
=+=⋅+⋅+⋅+−−+−−+⋅=
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧⋅+
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−⋅
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−=⋅+⋅= ω
rr
Se llega al mismo valor si se aplica la expresión
{ } [ ] { }ωω Gt2
Gc T21vm
21E +=

7.1 Energía cinética de un sólido rígido con un punto fijo.
- 35/105 -
7.1. Energía cinética de un sólido rígido con un punto fijo. Si un sólido rígido gira alrededor de un punto fijo (Q) y se toma un sistema de referencia fijo solidario a él, la expresión de la energía cinética ( cE ) puede calcularse a partir de la expresión anterior,
{ } [ ] { }ωω Gt2
Gc T21vm
21E +=
o bien, ya que la velocidad ( ivr
) de cualquier punto del sólido debido únicamente a su rotación respecto del sistema de referencia fijo, viene expresada por
( )∫∫
⎥⎦⎤
⎢⎣⎡ ×=⇒
⎪⎭
⎪⎬
⎫
×=
=
m
2ic
ii
m
2ic
rdm21E
rv
vdm21E rr
rrr
r
ωω
El término obtenido es semejante al segundo sumando de la expresión utilizada anteriormente
[ ] ( ) ( )[ ]∫∫∫ ×⋅+⎥⎦⎤
⎢⎣⎡ ×+=
miG
m
2i
m
2Gc 'rvdm'rdm
21vdm
21E
rrrrrrωω
luego su desarrollo lleva a una fórmula equivalente
( ) { } { } [ ] { }ωω
ω
ωω
ωωωω Qt
'z
'y
'x
'z'z'y'z'x
'z'y'y'y'x
'z'x'y'x'x
zyxm
2ic T
21
IIIIIIIII
21rdm
21E
QQQ
QQQ
QQQ
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−−−−
=⎥⎦⎤
⎢⎣⎡ ×= ∫
rr
Expresión que aplicada a los ejes principales de inercia ( 321 'e,'e,'errr
) que pasan por Q, se obtiene
{ } [ ] { } { } ( )2'e'e
2'e'e
2'e'e
'e
'e
'e
'e
'e
'e
'e'e'eQt
c 332211
3
2
1
3
2
1
321III
21
I000I000I
21T
21E ωωω
ω
ω
ω
ωωωωω ++=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
==
Concepto clave La energía cinética de un sólido rígido con un punto fijo se obtiene a partir del producto de la mitad de la velocidad angular transpuesta por el tensor de inercia másico asociado al punto fijo nuevamente por la velocidad angular.
relación entre energía cinética y momento
angular
Como el momento angular respecto del punto fijo Q ( { }QH ) viene expresada por
{ } [ ] { }ωQQ TH =
el término se puede expresar mediante
{ } [ ] { }{ } [ ] { }
{ } { }Qt
c
Qt
c H21E
TH
T21E
⋅=⇒⎪⎭
⎪⎬
⎫
=
=ω
ω
ωω
Concepto clave Si el punto del sólido al que se aplica la expresión no es fijo (Q) en un sistema de referencia fijo (Qxyz), la expresión anterior no es válida.

7.1 Energía cinética de un sólido rígido con un punto fijo.
- 36/105 -
Ejemplo 7.2: Para el sólido del ejemplo 4.1 basado en el ejemplo 3.2 del tema de Cinemática del sólido rígido correspondiente a un cilindro homogéneo de masa m=10 kg., radio R=10 cm. y altura H=50 cm. cuyo centro de masas se encuentra en el punto M de componentes {3, 2, 7} (m), orientado tal como muestra la figura, determinar la energía cinética a partir de considerar al origen del sistema de referencia como punto fijo perteneciente al sólido.
G=M
x
O y
z
xG
yG
zG
Ejemplo 3.2: Un sólido rígido está sometido a tres rotaciones simultáneas cuyas velocidades angulares son ω1 = 5, ω2 = 8, ω3 = 2 (en rad/s) respecto de unos ejes concurrentes en el origen del sistema de referencia cuyos unitarios vienen definidos por =1e
r{1, 0, 0}, =2e
r{0, 1, 0} y =3e
r{0, 0, 1} respectivamente. Determinar la
velocidad del punto M del sólido de coordenadas M = {3, 2, 7}.
La energía cinética en este caso se obtienen con la expresión
{ } { }Ot
c H21E ⋅= ω
La velocidad angular del sólido y el momento angular respecto del punto O son
( )s/rad285
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=ω
r { } ⎟
⎠⎞
⎜⎝⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−=
smkg
534,19094,4060
17,1751H O
luego la energía cinética del sólido es
{ } { } { } ( )[ ] ( )J18710534,190924,4060817,1751521
534,19094,4060
17,1751285
21H
21E O
tc =−⋅+⋅+⋅=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−=⋅= ω
que coincide con el anterior. Se llega al mismo valor si se aplica la expresión
{ } [ ] { }ωω Qt
c T21E =

7.2 Trabajo.
- 37/105 -
7.2. Trabajo.
definición El trabajo infinitesimal (dT) que un sistema de fuerzas realiza sobre el entorno infinitesimal de un punto (Pi) de un sólido rígido se define como el producto escalar de cada una de las fuerzas exteriores ( iF
r) e
interiores ( ijFdr
) que actúa en el entorno del punto por el desplazamiento infinitesimal ( irdr
) del punto
iijii rdFdrdFdTrrrr
⋅+⋅=
trabajo de las fuerzas interiores
sin embargo, el trabajo de las fuerzas interiores es nulo. Para comprobarlo se toman dos partículas del sólido (Pi, Pj) en los que actúan las fuerzas interiores ( jiij fd,fd
rr) y sus vectores de posición respecto del
sistema de referencia fijo ( ji r,rrr
) se tiene
( ) ijijjiijjijiijjjiiijij rdfdrdrdfdrdfdrdfdrdfdrdfddTrrrrrrrrrrrrr
⋅=−⋅=⋅−⋅=⋅+⋅=
en la que el vector de posición relativo ( ijrdr
) y la fuerza interior ( ijfdr
) se pueden expresar mediante
ijijijijij edredrrdrrr
+= ijijij edffdrr
=
luego
( ) ( ) ( )ijijijijijijijijijijijijijijij
ijijijijij
ijijij
ijijij
ederdfeedrdfedredredfdT
edredrrd
edffd
rdfddTrrrrrrr
rrr
rr
rr
⋅+⋅=+⋅=⇒
⎪⎪
⎭
⎪⎪
⎬
⎫
+=
=
⋅=
pero la variación del unitario ( ijedr
) siempre es perpendicular al unitario ( ijer
), y como los puntos (Pi, Pj)
pertenecen al mismo sólido rígido por lo que su distancia ( ijdr ) no varía
( ) ( )0dT
edeede
0dr
ederdfeedrdfdT
ij
ijijijij
ij
ijijijijijijijijij
=⇒
⎪⎪⎭
⎪⎪⎬
⎫
⋅⇒⊥
=
⋅+⋅=
rrrr
rrrr
y las fuerzas interiores no generan trabajo, luego solo lo generan las fuerzas exteriores
ii rdFdTrr
⋅=
relación entre el trabajo y la energía
cinética
Se determina a la relación entre trabajo y energía cinética, para lo que se parte de la ecuación fundamental de fuerzas en el entorno de un punto
∫=m
ii adm Frr
en la que la aceleración se expresa en función del tiempo
dtvd
a ii
rr
=

7.2 Trabajo.
- 38/105 -
luego
( ) ( )12 cc
m
2i21
mii
mi
i
ii
ii
mii
ii
EEdmv21Tdmvdvdtv
dtvd
dm dT
dtvrddtvd
a
adm F
rdFdT
−==⇒=⎟⎟⎠
⎞⎜⎜⎝
⎛=⇒
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
=
=
=
⋅=
∫∫∫∫
−rrrr
r
rr
rr
rr
rr
trabajo de las fuerzas y momentos
A partir de la expresión del trabajo ( ii rdFdTrr
⋅= ), el diferencial de desplazamiento de los puntos se puede poner en función de la velocidad, luego
dtvFdTdtvrd
dtrdv
rdFdTii
iii
i
ii rr
rrr
r
rr
⋅=⇒⎪⎭
⎪⎬
⎫
=⇒=
⋅=
descomposición en movimiento relativo
más arrastre
Como la velocidad absoluta de una partícula ( ivr
) se puede poner como suma de la velocidad del c.d.m.
( Gvr
) más la relativa ( rivr
) respecto del sistema de referencia solidario al c.d.m. y con movimiento de traslación (Gx’y’z’) se tiene
( ) ( )[ ] ( )dtGPFdtvFdtGPvFdT
0v
GPvvvvv
dtvFdT
iiGiiGi
ai
iGai
riGi
ii
−×⋅+⋅=−×+⋅=⇒
⎪⎪⎭
⎪⎪⎬
⎫
=
−×+=++=
⋅=
ωωωrrrrrrr
rr
rrrrrr
rr
velocidad angular en función del ángulo
expresión en la que podemos sustituir
( )( )GPdFrdFdT
dtddtd
rddtv
dtGPFdtvFdT
iiGiGG
iiGi
−×⋅+⋅=⇒
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
=⇒=
=
−×⋅+⋅=
θ
ωθθω
ωrrrr
rrr
r
rr
rrrr
Si en el segundo sumando intercambiamos entre sí los productos escalar y vectorial el resultado no varía, y ( ) ( )ii PGGP −−=− se obtiene
( ) ( ) ( ) θθθrrrrrr
dPGFGPdFGPdF iiiiii ⋅−×=−⋅×=−×⋅
a partir de lo cual se llega a
( )( ) ( )
( )θθθ
θrrrr
rr
rrrr
rrrr
r
rdMrdFdT
MPGF
dPGFGPdF
GPdFrdFdTi
i
FGGi
FGii
iiii
iiGi
⋅+⋅=⇒
⎪⎪⎭
⎪⎪⎬
⎫
=−×
⋅−×=−×⋅
−×⋅+⋅=
Concepto clave El trabajo que realizan las fuerzas exteriores que actúan sobre el entorno de un punto de un sólido rígido se puede descomponer en el trabajo debido a las fuerzas por el movimiento del centro de masas más el trabajo debido al momento respecto de dicho centro por el giro del

7.2 Trabajo.
- 39/105 -
sólido.
Ejemplo 7.3: Para el sólido del ejemplo 4.1 basado en el ejemplo 3.2 del tema de Cinemática del sólido rígido correspondiente a un cilindro homogéneo de masa m=10 kg., radio R=10 cm. y altura H=50 cm. cuyo centro de masas se encuentra en el punto M de componentes {3, 2, 7} (m), orientado tal como muestra la figura, determinar el trabajo asociado a las fuerzas exteriores y al momento de dichas fuerzas respecto del centro de masas desarrollado entre la posición inicial en que el sólido se encuentra en reposo y la situación actual.
G=M
x
O y
z
xG
yG
zG
Ejemplo 3.2: Un sólido rígido está sometido a tres rotaciones simultáneas cuyas velocidades angulares son ω1 = 5, ω2 = 8, ω3 = 2 (en rad/s) respecto de unos ejes concurrentes en el origen del sistema de referencia cuyos unitarios vienen definidos por =1e
r{1, 0, 0}, =2e
r{0, 1, 0} y =3e
r{0, 0, 1} respectivamente. Determinar la
velocidad del punto M del sólido de coordenadas M = {3, 2, 7}.
Como el trabajo entre dos instante se define por la variación de la energía cinética en dichos instantes
12 cc21 EET −=−
y en el instante inicial el sistema se encuentra en reposo
0E1c =
el trabajo queda reducido a la energía cinética en el instante final
2c21 ET =−
Tomando la expresión de la energía cinética
{ } [ ] { }ωω Gt2
Gc T21vm
21E +=
y teniendo en cuenta que los valores de cada uno de los sumando se han obtenido en el problema 7.1
{ } [ ] { } ( )J18710518705T21vm
21E G
t2Gc =+=+= ωω
por lo que la parte del trabajo asociado a las fuerzas exteriores (y por lo tanto al movimiento del c.d.g.) es
( )J18705vm21E 2
GGc ==
mientras que el asociado al momento de dichas fuerzas respecto del centro de masas (y por lo tanto a la rotación) es
{ } [ ] { } ( )J5T21E G
trc == ωω

8. Movimiento de un sólido rígido en tres dimensiones.
- 40/105 -
8. Movimiento de un sólido rígido en tres dimensiones.
Capacidades a desarrollar en el aprendizaje
Determinar el proceso de derivación respecto del tiempo en sistemas de referencia giratorios. Aplicar la derivación al momento angular respecto del centro de masas en un sistema de referencia solidario
a él y con movimiento de traslación. Aplicar la derivada del momento angular al caso en que la velocidad angular del sólido y del sistema de
referencia sean iguales. Aplicar la derivada del momento angular a la base principal de inercia que pasa por el centro de masas.
Ecuaciones de Euler. Aplicar las ecuaciones de Euler al caso de un sólido con un punto fijo. Aplicar las ecuaciones de Euler al caso de un sólido que gira respecto de un eje fijo. Analizar el equilibrio de árboles giratorios.
equilibrio dinámico Las ecuaciones diferenciales de equilibrio dinámico de un sólido rígido son
Gam Frr
=∑ GG HM&rr
=∑
momento angular sin embargo, derivar el momento angular respecto del tiempo ( GH
&r) no es un proceso evidente, ya que
viene expresado en función del tensor de inercia másico ( [ ]GT )
{ } [ ] { }ωGG TH = ⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−−−−
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
'z
'y
'x
'z'z'y'z'x
'z'y'y'y'x
'z'x'y'x'x
'z
'y
'x
GGG
GGG
GGG
G
G
G
IIIIIIIII
H
H
H
ω
ωω
definido respecto de unos ejes (x’y’z’) solidarios al c.d.m. (G) del sólido y con movimiento de traslación, por lo que el sólido con velocidad angular (ω
r) tendrá movimiento relativo de rotación respecto de dichos
ejes y las componentes del tensor de inercia ( [ ]GT ) variarán respecto del tiempo.
Para desarrollar la derivada del momento angular respecto del tiempo ( GH&r
) de forma directa sería necesario conocer su variación y obtener
[ ] { } [ ]⎭⎬⎫
⎩⎨⎧+= ωω&rr&&r
GGG TTH
Sin embargo normalmente se desconoce dicha variación, por lo que este procedimiento no es utilizado.
Concepto clave Se desconoce como varían las componentes del tensor de inercia másico respecto del tiempo.
derivación con ejes giratorios
Para derivar el momento angular ( GHr
) es más conveniente seleccionar un sistema de ejes giratorios (x’1y’1z’1) solidarios al c.d.m. del sólido (G) respecto de los cuales las componentes del tensor de inercia ( [ ]GT ) no varíen (Fig. 8.1) y aplicar el procedimiento de variación de un vector respecto de un sistema de

8. Movimiento de un sólido rígido en tres dimensiones.
- 41/105 -
referencia móvil.
Concepto clave Para obtener la derivada del momento angular respecto del centro de masas respecto del tiempo se utiliza un sistema de referencia giratorio en el que el tensor de inercia no varíe
x
x’
O
G y
y’
z
z’
x’1
y’1
z’1 Ωr
GHr
Fig. 8.1 – Sólido con sistema de referencias inercial (Oxyz), solidario al c.d.m. y con movimiento de
traslación (Gx’y’z’) y solidario al c.d.m. con movimiento de rotación (Gx’1y’1z’1).
momento angular en base giratoria
Se parte de considerar las componentes del momento angular ( GHr
) respecto de la base giratoria (x’1y’1z’1)
1'z1'y1'xG 'kH'jH'iHH111
rrrr++=
derivada del momento angular en base
giratoria Al derivarlo respecto del tiempo ( GH
&r) se ha de tener en cuenta que la base es móvil, y se han de derivar
tanto las componentes (111 'z'y'x H,H,H ) como los unitarios ( 111 'k,'j,'i
rrr) por lo que se obtiene
1'z1'y1'x1'z1'y1'xG 'kH'jH'iH'kH'jH'iHH111111
&r&r&rr&
r&
r&&r
+++++=
derivada de las componentes
Expresión en la que los tres primeros términos corresponden a la derivada de las componentes del momento angular (
111 'z'y'x H,H,H ) respecto de la base giratoria ( 111 'k,'j,'irrr
) considerando ésta como si fuera fija, ya que no aparecen las derivadas de los unitarios.
1'z1'y1'x'z'y'Gx
G 'kH'jH'iHH111
111
r&
r&
r&&r
++=⎟⎟⎠
⎞⎜⎜⎝
⎛
a los que se añade el producto de las componentes por la derivada de los unitario de la base móvil
1'z1'y1'x 'kH'jH'iH111
&r&r&r++
derivada de los unitarios
Para derivar los unitarios ( 111 'k,'j,'irrr
) se utiliza la expresión de Poisson
111111 'k'k'j'j'i'irr&rrr&rrr&r
×=×=×= ΩΩΩ
en la que Ωr
es la velocidad angular del sistema de referencia giratorio (Gx’1y’1z’1) por lo que

8. Movimiento de un sólido rígido en tres dimensiones.
- 42/105 -
( ) ( ) ( ) ( )1'z1'y1'x1'z1'y1'x
111111
1'z1'y1'x
'kH'jH'iH'kH'jH'iH
'k'k'j'j'i'i
'kH'jH'iH
111111
111
rrrrrrrrrr
rr&rrr&rrr&r
&r&r&r
++×=×+×+×
⇒⎪⎭
⎪⎬
⎫
×=×=×=
++
ΩΩΩΩ
ΩΩΩ
luego
G1'z1'y1'x H'kH'jH'iH111
rr&r&r&r×=++ Ω
y finalmente la expresión buscada es
( )
( )G'z'y'Gx
GG
G1'z1'y1'x
1'z1'y1'x'z'y'Gx
G
1'z1'y1'x1'z1'y1'xG
HHH
H'kH'jH'iH
'kH'jH'iHH
'kH'jH'iH'kH'jH'iHH
111
111
111
111
111111
rr&r&r
rr&r&r&r
r&
r&
r&&r
&r&r&rr&
r&
r&&r
×+⎟⎟⎠
⎞⎜⎜⎝
⎛=⇒
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
×=++
++=⎟⎟⎠
⎞⎜⎜⎝
⎛
+++++=
Ω
Ω
derivada del momento angular en base
giratoria
y la derivada del momento angular respecto del c.d.m. (G) y del tiempo es
( )G'z'y'Gx
GG HHH111
rr&r&r×+⎟⎟
⎠
⎞⎜⎜⎝
⎛= Ω
Concepto clave
La derivada del momento angular respecto del centro de masas y del tiempo viene expresada por
( )G'z'y'Gx
GG HHH111
rr&r&r×+⎟⎟
⎠
⎞⎜⎜⎝
⎛= Ω
En esta expresión el primer sumando (111 'z'y'Gx
GH ⎟⎟⎠
⎞⎜⎜⎝
⎛ &r) corresponde a la derivada del momento angular
respecto del tiempo, pero derivando únicamente las componentes (no los unitarios). Para su obtención se multiplica el tensor de inercia másico ( [ ]GT ) asociado al c.d.m. (G) por la derivada de las componentes (no
de los unitarios) de la velocidad angular del sólido ( { }er
&ω )
[ ] { }eTHG
111 'z'y'GxG
r&
&rω=⎟⎟
⎠
⎞⎜⎜⎝
⎛
Concepto clave
La derivada de las componentes del momento angular respecto del centro de masas y del tiempo en una base en la que el tensor de inercia no varía viene expresada por
[ ] { }eTHG
111 'z'y'GxG
r&
&rω=⎟⎟
⎠
⎞⎜⎜⎝
⎛

8. Movimiento de un sólido rígido en tres dimensiones.
- 43/105 -
El momento angular respecto del c.d.m. ( GHr
) del segundo sumando de
( )G'z'y'Gx
GG HHH111
rr&r&r×+⎟⎟
⎠
⎞⎜⎜⎝
⎛= Ω
se obtiene multiplicando el tensor de inercia másico ( [ ]GT ) asociado al c.d.m. (G) por la velocidad angular del sólido ( { }ω )
( ) [ ] { }ωG111
TH 'z'y'GxG =r
Según lo anterior, la expresión de la derivada del momento angular respecto del c.d.m. (G) y del tiempo
( GH&r
) se puede expresar mediante
[ ] { }
( )[ ] { }
43421
rr
4434421
&r&r
r&
ωω
Ω
G
111111
G
111 T
'z'y'GxG'z'y'x
eT
'z'y'GxGG HHH ×+⎟⎟
⎠
⎞⎜⎜⎝
⎛=
Concepto clave
Si el punto al que se aplica la expresión no es el centro de masas (G) en un sistema de referencia solidario a él y con movimiento de traslación (Gxyz), y no se utiliza para derivar un sistema giratorio (Gx’1y’1z’1) en el que el tensor de inercia ( [ ]GT ) no varíe, la expresión anterior no es válida.
Para que el tensor de inercia ( [ ]GT ) no varíe respecto del sistema de referencia giratorio (Gx’1y’1z’1), en
general la velocidad angular del sistema de referencia ( Ωr
) se hace coincidir con la del sólido (ωr
), pero como se verá posteriormente, en los casos en los que el sólido gira respecto de un eje de simetría másico, la velocidad angular del sistema de referencia ( Ω
r) puede ser distinta de la del sólido (ω
r) sin que el tensor de
inercia ( [ ]GT ) varíe.

8.1 Ecuación de Euler del movimiento. Extensión del principio de d’Alembert.
- 44/105 -
8.1. Ecuación de Euler del movimiento. Extensión del principio de d’Alembert.
equilibrio dinámico Definido un sólido rígido en movimiento, se desea desarrollar las ecuaciones de equilibrio dinámico del mismo
Gam Frr
=∑ GG HM&rr
=∑
Para determinar el sumatorio de momentos de las fuerzas exteriores respecto del c.d.m. ( ∑ GMr
) se ha de
derivar el momento angular respecto del tiempo ( GH&r
). Como esta expresión depende del tensor de inercia
{ } [ ] { }ωGG TH =
se considera un sistema de referencia giratorio (Gx’1y’1z’1) en el que el tensor de inercia ( [ ]GT ) no varíe, de forma que la expresión sea
[ ] { }
( )[ ] { }
4434421
rr
44 344 21
&r&rr
r&
ωω
Ω
G
111111
G
111 T
'z'y'GxG'z'y'x
eT
'z'y'GxGGG HHHM ×+⎟⎟
⎠
⎞⎜⎜⎝
⎛==∑
aplicación a base principal de inercia
Para simplificar el proceso, los ejes del sistema de referencia móvil (Gx’1y’1z’1) se escogen de forma que coincidan con los principales de inercia del sólido (e’1, e’2, e’3), que sustituidos en la expresión anterior es
[ ] { }
( )[ ] { }
43421
rr
4434421
&r&rr
r&
ωω
Ω
G
321321
G
321 T
'e'e'GeG'e'e'e
eT
'e'e'GeGGG HHHM ×+⎟⎟
⎠
⎞⎜⎜⎝
⎛==∑
o bien
G3G2G1
321
G3
G2
G1
G3
G2
G1
'e'e'e
'e'e'e
321
'e
'e
'e
'e
'e
'e
HHH
'e'e'e
H
H
H
MMM
ΩΩΩ
rrr
&
&
&
+
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
como el momento angular ( GHr
) se obtiene mediante
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
33
22
11
3
2
1
3
2
1
G1
G3
G1
'e'e
'e'e
'e'e
'e
'e
'e
'e
'e
'e
'e
'e
'e
I
I
I
I000I000I
H
H
H
ω
ω
ω
ω
ω
ω
su derivada respecto de la referencia móvil (Gx’1y’1z’1) se determina derivando las componentes de la velocidad angular (
321 'e'e'e ,, ωωω ) respecto del tiempo.
diferencia entre la derivada de las
componentes de la velocidad angular y la
aceleración angular
Es importante remarcar una vez más que se derivan las componentes (321 'e'e'e ,, ωωω ) pero no los unitarios
( 321 'e,'e,'errr
), por lo que la derivada de las componentes de la velocidad angular (321 'e'e'e ,, ωωω ) respecto
del tiempo no tiene por qué coincidir con la aceleración angular del sólido (αr
). Coincidirá únicamente en el caso en que la dirección de la velocidad angular ( e
r) sea constante

8.1 Ecuación de Euler del movimiento. Extensión del principio de d’Alembert.
- 45/105 -
eee0ectee
e r&&rr
&&rrr&rr
rr
ωωωωαωω
=+==⇒⎪⎭
⎪⎬⎫
=⇒=
=
Concepto clave La aceleración angular de un sólido solo coincide con la derivada de las componentes de la velocidad angular cuando la dirección de dicha velocidad es constante en el tiempo.
Según esto, la derivada del momento angular respecto del c.d.m. (G) respecto del tiempo 321 'e'e'Ge)H(
&r en
una base principal de inercia ( 321 'e,'e,'errr
) móvil, en la que el tensor de inercia ( [ ]GT ) no varía, se obtiene derivando las componentes de la velocidad angular (
321 'e'e'e ,, ωωω ) pero no los unitarios ( 321 'e,'e,'errr
)
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=⎟⎟⎠
⎞⎜⎜⎝
⎛⇒
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
33
22
11
G3
G2
G1
32133
22
11
G3
G2
G1
'e'e
'e'e
'e'e
'e
'e
'e
'e'e'GeG
'e'e
'e'e
'e'e
'e
'e
'e
I
I
I
H
H
H
H
I
I
I
H
H
H
ω
ω
ω
ω
ω
ω
&
&
&
&
&
&
&r
mientras que el desarrollo del producto vectorial correspondiente al segundo sumando es
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−−
=
G12G21
G31G13
G23G32
G3G2G1
321
'e'e'e'e
'e'e'e'e
'e'e'e'e
'e'e'e
'e'e'e
321
HHHHHH
HHH
'e'e'e
ΩΩΩΩΩΩ
ΩΩΩ
rrr
en la que cada una de las componentes del momento angular (G3G2G1 'e'e'e H,H,H ) respecto del c.d.m. (G) en
base principal de inercia (e1, e2, e3) viene expresada por
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
33
22
11
3
2
1
3
2
1
G3
G2
G1
'e'e
'e'e
'e'e
'e
'e
'e
'e
'e
'e
'e
'e
'e
I
I
I
I000I000I
H
H
H
ω
ω
ω
ω
ω
ω
por lo que
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−−
==
112221
331113
223332
332211
321
G3G2G1
321
'e'e'e'e'e'e
'e'e'e'e'e'e
'e'e'e'e'e'e
'e'e'e'e'e'e
'e'e'e
321
'e'e'e
'e'e'e
321
IIIIII
III
'e'e'e
HHH
'e'e'e
ωΩωΩωΩωΩωΩωΩ
ωωωΩΩΩΩΩΩ
rrrrrr
ecuaciones de Euler generalizadas
y finalmente el sumatorio de momentos de las fuerzas exteriores respecto del c.d.m. ( ∑ GMr
) en base principal de inercia (e1, e2, e3) es
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−−
+
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=+
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
112221
331113
223332
33
22
11
G3G2G1
321
G3
G2
G1
G3
G2
G1
'e'e'e'e'e'e
'e'e'e'e'e'e
'e'e'e'e'e'e
'e'e
'e'e
'e'e
'e'e'e
'e'e'e
321
'e
'e
'e
'e
'e
'e
IIIIII
I
I
I
HHH
'e'e'e
H
H
H
MMM
ωΩωΩωΩωΩωΩωΩ
ω
ω
ω
ΩΩΩ&
&
&rrr
&
&
&
que se denominan ecuaciones de Euler generalizadas.

8.1 Ecuación de Euler del movimiento. Extensión del principio de d’Alembert.
- 46/105 -
ecuaciones de Euler En el caso de que la velocidad angular del sistema de referencia se tome coincidente con la del sólido ( Ωω
rr= ) las expresiones se denominan ecuaciones de Euler
( )( )( ) ⎪
⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−−
+
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
1212
3131
3223
33
22
11
G3
G2
G1
'e'e'e'e
'e'e'e'e
'e'e'e'e
'e'e
'e'e
'e'e
'e
'e
'e
IIIIII
I
I
I
MMM
ωωωωωω
ω
ω
ω
&
&
&
Ejemplo 8.1: Un disco homogéneo de masa m=20 kg. y radio R=20 cm. cuyo centro de masas se encuentra en un punto G de componentes {0, 1, 0} (m), orientado tal como muestra la figura. Si el sólido gira respecto de su eje de simetría con una velocidad angular de 5 rad/s y aumentando su magnitud con una aceleración angular de 10 rad/s2, determinar el momento de las fuerzas exteriores respecto del centro de masas.
x
O y
z
G
En este caso no es necesario hacer el estudio en un sistema de referencia giratorio, ya que debido a la geometría del sólido y a que gira respecto del eje de simetría, el tensor de inercia asociado al sistema de referencia fijo no varía. El momento de las fuerzas exteriores respecto del c.d.m. es
[ ] { }
( )[ ] { }
43421
rr
4434421
&r&rr
r&
ωω
Ω
G
321321
G
321 T
eeGeGeee
eT
eeGeGGG HHHM ×+⎟⎟
⎠
⎞⎜⎜⎝
⎛==∑
La velocidad angular del sólido, la velocidad angular del sistema, la derivada de las componentes de la velocidad angular, el tensor de inercia másico respecto del c.d.m. y la velocidad angular del sistema son
( )s/rad050
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=ω
r ( )s/rad
000
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=Ω
r ( )2s/rad
0100
e⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
r&ω
La velocidad angular del sistema se ha tomado nula y el tensor de inercia no varía debido a la simetría del disco, aunque en este caso también sería válido haberla tomado igual a la del sólido.
Los momentos de inercia respecto del c.d.m. del disco son
2zGxG mR
41II == 2
yG mR21I =
en los que sustituyendo valores se tiene
( )222GeGezGxG mkg2,02,020
41mR
41IIII
31=⋅=====
( )222GeyG mkg4,02,020
21mR
21II
2=⋅===
luego el tensor de inercia másico asociado al c.d.m. es
[ ] ( )21G mkg10
200040002
T −
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
a partir del cual se pueden determinar

8.1 Ecuación de Euler del movimiento. Extensión del principio de d’Alembert.
- 47/105 -
[ ] { } ⎟⎟⎠
⎞⎜⎜⎝
⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡==⎟⎟
⎠
⎞⎜⎜⎝
⎛ −2
21
eeGeG s
mkg040
0100
10200040002
eTHG
321
r&
&rω
( ) [ ] { } ⎟⎟⎠
⎞⎜⎜⎝
⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡== −
smkg
020
050
10200040002
TH2
1eeGeG G321
ωr
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧==× 2
2321
eeGeGeee smkg
000
020000eee
H321321
rrr
rrΩ
luego finalmente
[ ] { }
( )[ ] { }
⎟⎟⎠
⎞⎜⎜⎝
⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧+
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=×+⎟⎟
⎠
⎞⎜⎜⎝
⎛==∑ 2
2
T
eeGeGeee
eT
eeGeGGG s
mkg040
000
040
HHHM
G
321321
G
32143421
rr
4434421
&r&rr
r&
ωω
Ω

8.2 Movimiento de un sólido con un punto fijo.
- 48/105 -
8.2. Movimiento de un sólido con un punto fijo.
Igual que en el caso del momento angular ( QHr
) de un sólido rígido restringido a girar alrededor de un punto fijo (Q), se pueden utilizar un punto fijo para determinar el sumatorio de momentos de las fuerzas exteriores ( ∑ QM
r).
equilibrio dinámico de un sólido con un punto
fijo
Si se considera un sistema de referencia fijo (Qxyz) solidario al punto Q también fijo del sólido, éste solo puede rotar respecto de esa referencia, por lo que si se toma un sistema de referencia giratorio solidario al punto fijo (Qx’1y’1z’1) en el que el tensor de inercia másico ( [ ]QT ) no varíe (Fig. 8.2), el sumatorio de
momentos de las fuerzas exteriores respecto de ese punto ( ∑ QMr
) adquiere una expresión análoga a la obtenida para el c.d.m. (G)
[ ] { }
( )[ ] { }
4434421
rr
44 344 21
&r&rr
r&
ωω
Ω
Q
111111
Q
111 T
'z'y'QxQ'z'y'x
eT
'z'y'QxQQQ HHHM ×+⎟⎟
⎠
⎞⎜⎜⎝
⎛==∑
x
Q y
z
x’1
y’1
z’1 Ωr
QHr
Fig. 8.2 – Sólido con un punto fijo (Q) sistema de referencias inercial (Qxyz) y
solidario al punto fijo y con movimiento de rotación (Qx’1y’1z’1).
desarrollando para un sistema de referencia principal de inercia (Qe’1e’2e’3) que pase por Q
[ ] { }
( )[ ] { }
43421
rr
4434421
&r&rr
r&
ωω
Ω
Q
321321
Q
321 T
'e'e'QeQ'e'e'e
eT
'e'e'QeQQQ HHHM ×+⎟⎟
⎠
⎞⎜⎜⎝
⎛==∑
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−−
+
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
112221
331113
223332
33
22
11
Q3
Q2
Q1
'e'e'e'e'e'e
'e'e'e'e'e'e
'e'e'e'e'e'e
'e'e
'e'e
'e'e
'e
'e
'e
IIIIII
I
I
I
MMM
ωΩωΩωΩωΩωΩωΩ
ω
ω
ω
&
&
&
Si además la velocidad angular del sólido (ωr
) y del sistema ( Ωr
) son la misma
( )( )( ) ⎪
⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−−
+
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
1212
3131
3223
33
22
11
Q3
Q2
Q1
'e'e'e'e
'e'e'e'e
'e'e'e'e
'e'e
'e'e
'e'e
'e
'e
'e
IIIIII
I
I
I
MMM
ωωωωωω
ω
ω
ω
&
&
&

8.2 Movimiento de un sólido con un punto fijo.
- 49/105 -
Concepto clave Si el punto (Q) al que se aplica esta expresión no es un punto fijo de un sólido, y no se utiliza para derivar un sistema giratorio (Qx’1y’1z’1) en el que el tensor de inercia ( [ ]QT ) no varíe, la expresión anterior no es válida.
Ejemplo 8.2: Para el disco del ejemplo 8.1, determinar el momento de las fuerzas exteriores respecto del origen del sistema de referencia O, considerado como punto fijo del sólido.
Ejemplo 8.1: Un disco homogéneo de masa m=20 kg. y radio R=20 cm. cuyo centro de masas se encuentra en un punto G de componentes {0, 1, 0} (m), orientado tal como muestra la figura. Si el sólido gira respecto de su eje de simetría con una velocidad angular de 5 rad/s y aumentando su magnitud con una aceleración angular de 10 rad/s2, determinar el momento de las fuerzas exteriores respecto del centro de masas.
x
O y
z
G
El momento de las fuerzas exteriores respecto del c.d.m. es
[ ] { }
( )[ ] { }
43421
rr
43421
&r&rr
r&
ωω
Ω
O
321321
O
321 T
eeOeOeee
eT
eeOeOOO HHHM ×+⎟⎟
⎠
⎞⎜⎜⎝
⎛==∑
La velocidad angular del sólido, la velocidad angular del sistema, la derivada de las componentes de la velocidad angular, el tensor de inercia másico respecto del c.d.m. y la velocidad angular del sistema son
( )s/rad050
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=ω
r ( )s/rad
000
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=Ω
r ( )2s/rad
0100
e⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
r&ω
Nuevamente la velocidad angular del sistema se ha considerado nula.
Los momentos de inercia respecto del c.d.m. del disco son
( )2zGxG mkg2,0II == ( )2
yG mkg4,0I =
por lo que hay que trasladarlas por Steiner al punto O de forma que 2
xxxx GoGomdII −+= 2
yyyy GoGomdII −+= 2
xzzz GoGomdII −+=
GGGGGo Gzy,yOzGzx,xOzxyxy dmdII += GGGGGo Gyz,zOyGyx,xOyxzxz dmdII +=
GGGGGo Gzy,yOzGzx,xOzyzyz dmdII +=
en las que sustituyendo valores
( ) ( )2222xxxx mkg2,2001202,0mdII
GoGo=+⋅+=+= −
( ) ( )2222yyyy mkg4,000204,0mdII
GoGo=+⋅+=+= −
( ) ( )2222xzzz mkg2,2010202,0mdII
GoGo=+⋅+=+= −
( )2Gzy,yOzGzx,xOzxyxy mkg001200dmdII
GGGGGo=⋅⋅+=+=

8.2 Movimiento de un sólido con un punto fijo.
- 50/105 -
( )2Gyz,zOyGyx,xOyxzxz mkg000200dmdII
GGGGGo=⋅⋅+=+=
( )2Gzx,xOzGyx,xOyyzyz mkg010200dmdII
GGGGGo=⋅⋅+=+=
luego el tensor de inercia asociado al punto O es
[ ] ( )2O mkg
2,200004,00002,20
T⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
a partir del cual se pueden determinar
[ ] { } ⎟⎟⎠
⎞⎜⎜⎝
⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡==⎟⎟
⎠
⎞⎜⎜⎝
⎛2
2
OeeOe
O smkg
040
0100
2,200004,00002,20
eTH321
r&
&rω
( ) [ ] { } ⎟⎟⎠
⎞⎜⎜⎝
⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡==
smkg
020
050
2,200004,00002,20
TH2
OeeOeO 321ω
r
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧==× 2
2321
eeOeOeee smkg
000
040000eee
H321321
rrr
rrΩ
luego finalmente
[ ] { }
( )[ ] { }
⎟⎟⎠
⎞⎜⎜⎝
⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧+
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=×+⎟⎟
⎠
⎞⎜⎜⎝
⎛==∑ 2
2
T
eeOeOeee
eT
eeOeOOO s
mkg040
000
040
HHHM
O
321321
O
32143421
rr
43421
&r&rr
r&
ωω
Ω
que coincide con el momento respecto del c.d.m. obtenido anteriormente, ya que la resultante de fuerzas exteriores es nula al no tener el c.d.m. aceleración
0am F G
rrr==∑
y como
( ) GGO MFOGMMrrrr
=×−+= ∑
se comprueba que el momento respecto del c.d.m. y del origen del sistema de referencia coinciden.

8.3 Rotación de un sólido rígido alrededor de un eje fijo.
- 51/105 -
8.3. Rotación de un sólido rígido alrededor de un eje fijo.
En este caso se considera un sólido que gira alrededor de un eje fijo (Fig. 8.3) con una velocidad y aceleración angular ( e,
r&
rrωαω = ) conocidas.
Concepto clave En el caso de giro respecto de un eje fijo la derivada de las componentes de la velocidad angular y la aceleración angular coinciden.
x
Q=G y
z=z’1
ωΩrr
=
x’1
y’1
A
B
Fig. 8.3 – Sólido que gira respecto de un eje fijo, sistema de referencia inercial (Qxyz) y sistema de
referencia solidario a un punto fijo y con movimiento de rotación (Qx’1y’1z’1).
eje z de rotación Para simplificar el proceso se toma el sistema de referencia fijo con eje z coincidente con el eje de rotación, con lo que la velocidad angular del sólido es
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
z
00
ωωr
simplificación Nuevamente por simplificar, se considera una base giratoria (Qx’1y’1z’1) con eje z’1 que coincide con el eje de rotación, y que la velocidad angular del sólido y del sistema coinciden ( Ωω
rr= ) por lo que no existe
movimiento relativo entre ambos y el tensor de inercia en ese sistema de referencia no varía. Aplicando la ecuación correspondiente al movimiento de un sólido rígido con un punto fijo se tiene
[ ] { }
( )[ ] { }
4434421
rr
44 344 21
&r&rr
r&
ωω
Ω
Q
111111
Q
111 T
'z'y'QxQ'z'y'x
eT
'z'y'QxQQQ HHHM ×+⎟⎟
⎠
⎞⎜⎜⎝
⎛==∑
En la que desarrollando
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
−
−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−−−−−
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=
1Q1
1Q11
1Q11
1Q1Q11Q11
Q11Q1Q11
Q11Q11Q1
Q1
Q1
Q1
'z'z
'z'z'y
'z'z'x
'z'z'z'y'z'x
'z'y'y'y'x
'z'x'y'x'x
'z
'y
'x
Q
I
I
I
00
IIIIIIIII
H
H
H
H
ω
ω
ω
ω
r

8.3 Rotación de un sólido rígido alrededor de un eje fijo.
- 52/105 -
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
−
−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−−−−−
=
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
=⎟⎟⎠
⎞⎜⎜⎝
⎛
1Q1
1Q11
1Q11
1Q1Q11Q11
Q11Q1Q11
Q11Q11Q1
Q1
Q1
Q1
111
'z'z
'z'z'y
'z'z'x
'z'z'z'y'z'x
'z'y'y'y'x
'z'x'y'x'x
'z
'y
'x
'z'y'QxQ
I
I
I
00
IIIIIIIII
H
H
H
H
ω
ω
ω
ω &
&
&
&&
&
&
&r
( )⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=−−
=×0
I
I
III00
'k'j'iH 2
'z'z'x
2'z'z'y
'z'z'z'z'y'z'z'x
'z
111
Q 1Q11
1Q11
1Q11Q111Q11
1ω
ω
ωωωωΩ
rrr
rr
y el sumatorio de momentos es
[ ] { }
( )[ ] { } ⎪
⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+−
+−
=×+⎟⎟⎠
⎞⎜⎜⎝
⎛==∑
1Q1
1Q111Q11
1Q111Q11
Q
111111
Q
111
'z'z
2'z'z'x'z'z'y
2'z'z'y'z'z'x
T
'z'y'xQ'z'y'x
eT
'z'y'QxQQQ
I
II
II
HHHM
ω
ωω
ωω
Ω
ωω
&
&
&
43421
rr
44 344 21
&r&rr
r&
que junto con las ecuaciones de equilibrio dinámico con fuerzas
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
==∑
1
1
1
'Gz
'Gy
'Gx
G
a
a
a
mam Frr
permiten determinar las seis ecuaciones de equilibrio.
Concepto clave Si el punto al que se aplica la expresión no es fijo o el eje z’1 no coincide con el de rotación del sólido, la expresión anterior no es válida.

8.4 Estudio del equilibrio de ejes o árboles planos rotatorios.
- 53/105 -
8.4. Estudio del equilibrio de ejes o árboles planos rotatorios.
Como aplicación a un caso concreto, se considera un cigüeñal de longitud l y peso W que se sitúa en un plano vertical (Fig. 8.4) pasando su eje de rotación por el c.d.m. (G) del sólido. La reacción vertical actúa únicamente en el vínculo inferior (A).
x
Q=G y
z=z’1
ωΩrr
=
x’1
y’1
A
B
g
Fig. 8.4 – Cigüeñal rotatorio respecto de un eje fijo, sistema de referencia inercial (Qxyz) y sistema de
referencia solidario a un punto fijo y con movimiento de rotación (Qx’1y’1z’1).
equilibrio en reposo Si el cigüeñal está inicialmente en reposo, no ejerce fuerza lateral sobre los soportes (A, B), ya que su c.d.m. (G) se encuentra en la vertical del vínculo A y su reacción (
A'z 1R ) tiene de módulo el peso (W) del
cigüeñal.
equilibrio en movimiento
Si el cigüeñal gira con una velocidad y aceleración angular (ω y ω& ) y se considera un sistema de referencia (Qx’1y’1z’1) solidario a un punto fijo del sólido (Q) que gira con su velocidad angular (ω
r), la
expresión de equilibrio de momentos de las fuerzas exteriores es
[ ] { }
( )[ ] { } ⎪
⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+−
+−
=×+⎟⎟⎠
⎞⎜⎜⎝
⎛==∑
1Q1
1Q111Q11
1Q111Q11
Q
111111
Q
111
'z'z
2'z'z'x'z'z'y
2'z'z'y'z'z'x
T
'z'y'QxQ'z'y'x
eT
'z'y'QxQQQ
I
II
II
HHHM
ω
ωω
ωω
Ω
ωω
&
&
&
4434421
rr
44 344 21
&r&rr
r&
característica geométrica
sin embargo, por definición de momentos de inercia centrífugos
∫=m
1111'z'x 'dz'dx'z'xIQ11
expresión en la que, al ser un sólido bidimensional situado en el plano giratorio Qy’1z’1 las componentes 1'x de todos los puntos del sólido son nulas en todo instante, por lo que
0'dz'dx'z'xIm
1111'z'x Q11== ∫
Concepto clave Para sólidos planos los momentos de inercia centrífugos con subíndices que contengan al eje perpendicular al plano son nulos.

8.4 Estudio del equilibrio de ejes o árboles planos rotatorios.
- 54/105 -
y la derivada del momento angular respecto del punto Q y respecto del tiempo ( QH&r
) se simplifica a
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
−=
1Q1
1Q11
1Q11
'z'z
'z'z'y
2'z'z'y
Q
I
I
I
H
ω
ω
ω
&
&&r
caso de velocidad constante
En el caso en el que la velocidad angular (ωr
) del cigüeñal sea constante, su derivada respecto del tiempo es nula 0
1'z =ω& y la expresión es
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=00
I
H
2'z'z'y
Q
1Q11ω
&r
o lo que lo mismo
2'z'z'y'x 1Q11Q1
IH ω=&
Concepto clave
Para elementos planos simétricos respecto de su centro de masas (m) que giran con velocidad angular (ω
r) constante, la derivada del momento angular respecto de un punto
fijo (Q) y respecto del tiempo ( QH&r
) solo tiene componente en la dirección perpendicular al plano del elemento.
Q
z’1
x’1
y’1
A
B
A1'zR
A1'yR
B1'yR
W
l Q1'xM
Fig. 8.5 – Momento y reacciones del cigüeñal rotatorio.
A partir de la ecuación del equilibrio dinámico se tiene
QQ HM&rr
=∑
reacciones giratorias por lo que para que exista dicho equilibrio se tienen que generar dos reacciones giratorias (A1'yR y
B1'yR )

8.4 Estudio del equilibrio de ejes o árboles planos rotatorios.
- 55/105 -
que de forma conjunta producen la componente del momento Q1'xM
r (Fig. 8.5).
Concepto clave En el equilibrio de sistemas dinámicos las reacciones que aparecen giran con la velocidad angular del sistema de referencia.
cálculo de reacciones Para la obtención de dichas reacciones se aplica lo siguiente
l
IRRIlR
2lR
2lRM
RR0amF
IHM2'z'z'y
'y'y2'z'z'y'y
'y'y'x
'y'y'y'y
2'z'z'y'x'x
1Q11
B1A11Q11A1
B1A1Q1
B1A111
1Q11Q1Q1ω
ω
ω
==⇒=⇒
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
+=
=⇒==
==
∑
∑
∑rr
&
Concepto clave Las reacciones que aparecen en sólidos giratorios son indeseables ya que generan efectos vibratorios que se evita equilibrando el sólido, de forma que los momentos de inercia centrífugos desaparezcan.
La eliminación de los momentos de inercia centrífugos es la base del equilibrado de sistemas giratorios.

9. Movimiento de un giroscopio.
- 56/105 -
9. Movimiento de un giroscopio.
Capacidades a desarrollar en el aprendizaje
Determinar la relación entre los movimientos de un giroscopio, los ángulos de Euler y el equilibrio dinámico.
Desarrollar las ecuaciones de equilibrio dinámico en un sistema de referencia con movimiento de precesión y nutación en base arbitraria y principal de inercia.
Un giroscopio es un rotor montado en una suspensión Cardan que puede girar libremente respecto de tres ejes que pasan por su c.d.m. (G) de forma que puede adquirir cualquier orientación.
ángulos de Euler Para su estudio se utilizan los ángulos de Euler ya que se adaptan perfectamente a su movimiento. En el estudio se considera una base fija (xyz), una base con movimiento de precesión (x1y1z1) que se mueve con velocidad de precesión (ψ& ) respecto del eje z, una base con movimiento de precesión y nutación
(x’1y’1z’1) que se mueve con velocidad de precesión y nutación (ψ& y θ& ) sobre los ejes z1 y x’1 respectivamente, y una base con movimiento de precesión, nutación y rotación propia (x’’1y’’1z’’1) que se mueve con velocidad de precesión, nutación y rotación propia (ψ& ,θ& y ϕ& ) sobre de los ejes z1, x’1 y z’’1 respectivamente (Fig. 9.1).
x
y
z= z1
G
x1 = x’1
y1 ψψ
ψ&
θ
θ
θ&
y’1
z’1 = z’’1
ϕ&ϕ
ϕ
y’’1
x’’1 Fig. 9.1 – Giroscopio con bases de Euler.
Como se vio en el estudio cinemático de sólido rígido, la velocidad angular total (ωr
) tiene distintas componentes en función de la base en la que se realiza en el análisis. En el estudio dinámico hay que
derivar el momento angular respecto del c.d.m. y respecto del tiempo ( GH&r
), para lo que habrá que utilizar una base giratoria que cumpla con la propiedad de que el tensor de inercia másico respecto del c.d.m. ( [ ]GT ) no varíe. Los ángulos de Euler permiten utilizar distintas bases, de entre las que se seleccionará la que cumpla con la condición indicada.
bases fija y con movimiento de
precesión
Las bases fija (xyz) y con movimiento de precesión (ψ& , x1y1z1) se podrán utilizar cuando el sólido gira respecto de un eje fijo. En este caso el estudio se pude hacer sin usar ángulos de Euler ya que el unitario asociado a la velocidad angular no varía, y la derivada de las componentes de la velocidad angular coincide con las componentes de la aceleración angular.
base con movimiento de precesión y nutación
La base con movimiento de precesión y nutación (ψ& y θ& , x’1y’1z’1) se podrá utilizar cuando el sólido tiene simetría axil respecto del eje de rotación propia, y el movimiento relativo del sólido respecto del sistema de referencia es únicamente esta rotación propia (ϕ& ), por lo que el tensor de inercia ( [ ]GT ) no varía.

9. Movimiento de un giroscopio.
- 57/105 -
base con movimiento de precesión, nutación y
rotación propia
La base con movimiento de precesión, nutación y rotación propia (ψ& , θ& y ϕ& , x’’1y’’1z’’1) se podrá utilizar cuando el sólido está sometido a tres giros consecutivos, ya que no existe movimiento relativo entre el sólido y el sistema de referencia y el tensor de inercia ( [ ]GT ) no varía.
análisis en base con movimiento de
precesión y nutación
Mientras no se indique lo contrario, los estudios que se realizarán estarán asociados a un sólido rígido con simetría axial y velocidad angular de precesión, nutación y rotación propia en la base con movimiento de precesión y nutación (x’1y’1z’1), estando la velocidad de rotación propia (ϕ& ) sobre su eje de simetría.
La expresión de equilibrio dinámico a utilizar es
[ ] { }[ ] { }
43421
rr
4434421
&r&rr
r&
ωω
Ω
G
111111
G
111 T
'z'y'xG'z'y'x
eT
'z'y'xGGG HHHM ×+⎟⎟
⎠
⎞⎜⎜⎝
⎛==∑
en la que la velocidad angular del sólido (ωr
) está en función de las coordenadas de Euler ( ϕθψ ,, ) definidas en tres bases distintas al mismo tiempo,
11 'kikr
&r&
r&
r ϕθψω ++=
por lo que conocidas las matrices ( [ ]A y [ ]B ) de cambio de base
[ ] [ ]111
B111
A 'z'y'xzyxxyz ⎯→⎯⎯→⎯
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−=
1000cossen0sencos
A ψψψψ
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−=
θθθθ
cossen0sencos0
001B
se realizan los procesos necesarios para transformar los unitarios ( 11 'k,i,krrr
) a la base con movimiento de precesión y nutación ( 111 'z'y'x )
[ ]111
A zyxk ⎯→⎯r
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
100
100
1000cossen0sencos
zyx
1
1
1ψψψψ
[ ] [ ]111
B111
A 'z'y'xzyxk ⎯→⎯⎯→⎯r
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
θθ
θθθθ
cossen
0
100
cossen0sencos0
001
'z'y'x
1
1
1
[ ]111
B1 'z'y'xi ⎯→⎯r
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
001
001
cossen0sencos0
001
'z'y'x
1
1
1
θθθθ
[ ]111
I1 'z'y'x'k ⎯→⎯r
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
100
100
100010001
'z'y'x
1
1
1
velocidad angular del sólido
a partir de los cuales se obtiene la velocidad angular del sólido ( 1'z1'y1'xωr
) en dicha base
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧+
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧+
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=ϕθψ
θψθ
ϕθθθψ
ωωω
ω&&
&
&
&&&r
cossen
100
001
cossen
0
1
1
1
111
'z
'y
'x
'z'y'x

9. Movimiento de un giroscopio.
- 58/105 -
velocidad angular del sistema de referencia
La velocidad angular del sistema de referencia ( 1'z1'y1'xΩr
) en base con movimiento de precesión y
nutación varía de la del sólido ( 1'z1'y1'xωr
) en la componente de rotación propia (ϕ& )
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=θψθψ
θΩ
cossen
111 'z'y'x&
&
&r
derivada de las componentes de la
velocidad angular del sólido
mientras que la derivada de las componentes de la velocidad angular del sólido ( { }er
&ω ) se obtienen de
dicha velocidad (ωr
)
{ }⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+−+=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⇒
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+=
ϕθθψθψθθψθψ
θ
ωωω
ωϕθψ
θψθ
ω&&&&&&
&&&&
&&
&
&
&r
&
&&
&
&r
sencoscossene
cossen
1
1
1
111
'z
'y
'x
'z'y'x
Concepto clave La velocidad angular de un sólido definida a partir de los ángulos de Euler ( ( )ϕθψω &&&
r,, )
facilita la obtención de la derivada de las componentes de la velocidad angular respecto del tiempo ( { }e
r&ω ) sin derivar los unitarios.
estudio en base arbitraria
Para generalizar se desarrollan las expresiones considerando que el tensor de inercia ( [ ]GT ) está asociado
a una base no principal de inercia (x’1y’1z’1) por lo que la cantidad de movimiento angular ( GHr
), la
derivada de sus componentes respecto del tiempo ( ⎟⎟⎠
⎞⎜⎜⎝
⎛GH&r
) y el producto de la velocidad angular del
sistema por la cantidad de movimiento angular ( Hrr
×Ω ) son
( ) ( )( ) ( )
( ) ( )⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
++−−
+−+−
+−−
=
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−−−−
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−−−−
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
ϕθψθψθ
ϕθψθψθ
ϕθψθψθ
ϕθψθψ
θ
ω
ω
ω
&&&&
&&&&
&&&&
&&
&
&
cosIsenII
cosIsenII
cosIsenII
cossen
IIIIIIIII
IIIIIIIII
H
H
H
11111
11111
11111
11111
11111
11111
1
1
1
11111
11111
11111
G1
G1
G1
'z'z'y'z'x
'z'y'y'y'x
'z'x'y'x'x
'z'z'y'z'x
'z'y'y'y'x
'z'x'y'x'x
'z
'y
'x
'z'z'y'z'x
'z'y'y'y'x
'z'x'y'x'x
'z
'y
'x
( ) ( )( ) ( )
( ) ( )⎪⎪⎭⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+−++−−
+−−++−
+−−+−
=
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+−+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−−−−
=
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−−−−
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=⎟⎟⎠
⎞⎜⎜⎝
⎛
ϕθθψθψθθψθψθ
ϕθθψθψθθψθψθ
ϕθθψθψθθψθψθ
ϕθθψθψθθψθψ
θ
ω
ω
ω
&&&&&&&&&&&&
&&&&&&&&&&&&
&&&&&&&&&&&&
&&&&&&
&&&&
&&
&
&
&
&
&
&
&r
sencosIcossenII
sencosIcossenII
sencosIcossenII
sencoscossen
IIIIIIIII
IIIIIIIII
H
H
H
H
11111
11111
11111
11111
11111
11111
1
1
1
11111
11111
11111
G1
G1
G1
111
'z'z'y'z'x
'z'y'y'y'x
'z'x'y'x'x
'z'z'y'z'x
'z'y'y'y'x
'z'x'y'x'x
'z
'y
'x
'z'z'y'z'x
'z'y'y'y'x
'z'x'y'x'x
'z
'y
'x
'z'y'xGG

9. Movimiento de un giroscopio.
- 59/105 -
( ) ( )[ ] ( ) ( )[ ]( ) ( )[ ] ( ) ( )[ ]( ) ( )[ ] ( ) ( )[ ] ⎪
⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+−−−+−+−
++−−−+−−
+−+−−++−−
=
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
−
−
−
==×
θψϕθψθψθθϕθψθψθ
θϕθψθψθψϕθψθψθ
θψϕθψθψθθψϕθψθψθ
θψθ
θψ
θψθψ
θψθψθΩ
sencosIsenIIcosIsenII
cosIsenIIcoscosIsenII
coscosIsenIIsencosIsenII
senHH
HcosH
cosHsenH
HHHcossen
'k'j'iH
1111111111
1111111111
1111111111
G1G1
G1G1
G1G1
G1G1G1
111111
'z'x'y'x'x'z'y'y'y'x
'z'z'y'z'x'z'x'y'x'x
'z'y'y'y'x'z'z'y'z'x
'x'y
'z'x
'y'z
'z'y'x
111
'z'y'xG'z'y'x
&&&&&&&&&&
&&&&&&&&&&
&&&&&&&&&&
&&
&&
&&
&&&
rrr
rr
y la expresión final es
[ ] { }[ ] { }
( ) ( )( ) ( )
( ) ( )( ) ( )[ ] ( ) ( )[ ]
( ) ( )[ ] ( ) ( )[ ]( ) ( )[ ] ( ) ( )[ ] ⎪
⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+−−−+−+−
++−−−+−−
+−+−−++−−
+
+
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+−++−−
+−−++−
+−−+−
=
=×+⎟⎟⎠
⎞⎜⎜⎝
⎛==∑
θψϕθψθψθθϕθψθψθ
θϕθψθψθψϕθψθψθ
θψϕθψθψθθψϕθψθψθ
ϕθθψθψθθψθψθ
ϕθθψθψθθψθψθ
ϕθθψθψθθψθψθ
Ω
ωω
sencosIsenIIcosIsenII
cosIsenIIcoscosIsenII
coscosIsenIIsencosIsenII
sencosIcossenII
sencosIcossenII
sencosIcossenII
HHHM
1111111111
1111111111
1111111111
11111
11111
11111
G
111111
G
111
111
'z'x'y'x'x'z'y'y'y'x
'z'z'y'z'x'z'x'y'x'x
'z'y'y'y'x'z'z'y'z'x
'z'z'y'z'x
'z'y'y'y'x
'z'x'y'x'x
T
'z'y'xG'z'y'x
eT
'z'y'xGGG'z'y'xG
&&&&&&&&&&
&&&&&&&&&&
&&&&&&&&&&
&&&&&&&&&&&&
&&&&&&&&&&&&
&&&&&&&&&&&&
43421
rr
4434421
&r&rr
r&
Debido a su extensión la expresión simbólica obtenida no es manejable, por lo que si hay que utilizarla en algún caso práctico se recomienda que en vez de sustituir sobre esta expresión ya desarrollada se parta de la fórmula inicial
[ ] { }[ ] { }
43421
rr
44 344 21
&r&rr
r&
ωω
Ω
G
111111
G
111
111
T
'z'y'xG'z'y'x
eT
'z'y'xGGG'z'y'xG HHHM ×+⎟⎟
⎠
⎞⎜⎜⎝
⎛==∑
y se realicen las operaciones sustituyendo los términos por los valores específicos.
estudio en base principal de inercia
En el caso en el que la base de estudio sea principal de inercia (e’1e’2e’3) y se identifiquen los momentos de inercia respecto de los ejes de las dos bases (
11 'e'x II = , 21 'e'y II = ,
31 'e'z II = ) los momento de inercia
centrífugos se anulan ( 0III111111 'z'y'z'x'y'x === ) y la expresión se simplifica
[ ] { }[ ] { }
( )( )
( )[ ] ( )[ ][ ] ( )[ ]
( )[ ] [ ] ⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
−
+−
−+
+
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+−
+=
=×+⎟⎟⎠
⎞⎜⎜⎝
⎛==∑
θψθθθψ
θϕθψψθ
θψθψθψϕθψ
ϕθθψθψ
θθψθψ
θ
Ω
ωω
senIsenI
cosIcosI
cossenIsencosI
sencosI
cossenI
I
HHHM
12
31
23
3
2
1
G
321321
G
321
321
'e'e
'e'e
'e'e
'e
'e
'e
T
'e'e'eG'e'e'e
eT
'e'e'eGGG'e'e'eG
&&&&
&&&&&
&&&&&
&&&&&&
&&&&
&&
43421
rr
4434421
&r&rr
r&

9. Movimiento de un giroscopio.
- 60/105 -
Ejemplo 9.1: El sólido del ejemplo 5.3 del tema de Cinemática del Sólido Rígido es un disco homogéneo de masa m=10 kg. y radio R=10 cm. cuyo centro de masas se encuentra en el punto A orientado tal como muestra la figura. Determinar los momentos que actúan en el centro de masas de dicho sólido.
Ejemplo 5.3: El disco homogéneo del problema 5.1 gira a velocidad angular ω1 = 15 rad/s y aceleración angular α1 = 9 rad/s2 respecto del eje que pasa por A; al mismo tiempo gira con velocidad angular ω2 = 10 rad/s respecto del eje OB, y por último gira con velocidad angular ω3 = 8 rad/s y aceleración angular α3 = 6 rad/s2 respecto del eje y. Determinar la velocidad y aceleración angular absolutas del disco respecto de un sistema de referencia que en el instante de estudio coincide con el que tiene movimiento de precesión y nutación del problema anterior. Determinar la velocidad y aceleración relativas respecto del sistema de referencia con movimiento de precesión y nutación.
α1
α3
B
ω2
3
La expresión a utilizar es
[ ] { }[ ] { }
43421
rr
4434421
&r&rr
r&
ωω
Ω
G
111111
G
111 T
'z'y'xG'z'y'x
eT
'z'y'xGGG HHHM ×+⎟⎟
⎠
⎞⎜⎜⎝
⎛==∑
El estudio se va ha hacer sobre un sistema de referencia con movimiento de precesión y nutación Gx’1y’1z’1 de forma que el tensor de inercia másico respecto del c.d.m. no varíe, sistema que aparece en la figura
α1
α3
B
ω2
3 y1
ψ
xe=z’1
ye=x1=x’1
ze=z1=y’1
y1 θ
ψ
Los parámetros de Euler obtenidos en el problema cinemático son los siguientes
( ) ( )( )( ) ( )2
2
s/rad9s/rad15
0s/rad102
s/rad6s/rad82
−==
===
−===
ϕϕϕ
θθπθ
ψψπψ
&&&
&&&
&&&
Por lo que sustituyendo en las ecuaciones asociadas a la velocidad angular del sólido, del sistema y la derivada de las componentes de la velocidad angular

9. Movimiento de un giroscopio.
- 61/105 -
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+=
θψθψ
θΩ
θψϕθψ
θω
cossen
cossen
111111 'z'y'x'z'y'x&
&
&r
&&
&
&r
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−++=
θθψθψϕθθψθψ
θω
sencoscossene
111111 'z'y'x'z'y'x&&&&&&
&&&&
&&r
&
se obtienen dichos valores
( )s/rad158
10
111 'z'y'x⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=ω
r ( )s/rad
08
10
111 'z'y'x⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=Ω
r
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−=
896
0e
111111 'z'y'x'z'y'xr
&ω
Los momentos de inercia respecto del c.d.m. del disco son
2'y'x mR
41II
G1G1== 2
'z mR21I
G1=
en los que sustituyendo valores se tiene
( )222'y'x mkg025,01,010
41mR
41II
G1G1=⋅===
( )222'z mkg05,01,010
21mR
21I
G1=⋅==
luego el tensor de inercia másico asociado al c.d.m. en la base con movimiento de precesión y nutación es
[ ] ( )2G mkg
05,0000025,0000025,0
T⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
a partir del cual se pueden determinar
[ ] { } ⎟⎟⎠
⎞⎜⎜⎝
⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡==⎟⎟
⎠
⎞⎜⎜⎝
⎛2
2
'z'y'xG s
mkg45,415,0
0
896
0
05,0000025,0000025,0
eTHG
111
r&
&rω
( ) [ ] { } ⎟⎟⎠
⎞⎜⎜⎝
⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡==
smkg
75,02,0
25,0
158
10
05,0000025,0000025,0
TH2
'z'y'xG G111ω
r
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧−==× 2
2111
'z'y'GxG'z'y'x smkg
05,7
6
75,02,025,00810'k'j'i
H111111
rrr
rrΩ
Luego el momento de las fuerzas exteriores respecto del c.d.m. es
[ ] { }[ ] { }
⎟⎟⎠
⎞⎜⎜⎝
⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧−+
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−=×+⎟⎟
⎠
⎞⎜⎜⎝
⎛==∑ 2
2
T
'z'y'xG'z'y'x
eT
'z'y'xGGG s
mkg45,465,7
6
05,7
6
45,415,0
0HHHM
G
111111
G
11143421
rr
4434421
&r&rr
r&
ωω
Ω

9.1 Precesión estacionaria en un giroscopio.
- 62/105 -
9.1. Precesión estacionaria en un giroscopio.
Capacidades a desarrollar en el aprendizaje
Definir las características de la precesión estacionaria. Aplicar el equilibrio dinámico a un giroscopio con movimiento de precesión estacionaria. Simplificar para
nutación de 90º. Analizar el comportamiento experimental de un giróscopo con movimiento de precesión estacionaria y
nutación de 90º al desequilibrarse. Aplicar los efectos giroscópicos a aviones y vehículos de dos ruedas. Determinar las relaciones entre velocidad de precesión y rotación propia para cualquier ángulo de nutación
en movimientos de precesión estacionaria. Definir la variación del momento angular de un sólido de revolución con precesión estacionaria y momento
de las fuerzas exteriores nulo. Definir el elipsoide de Poinsot. Analizar la influencia de la geometría en el movimiento de un sólido de revolución con precesión
estacionaria y momento de las fuerzas exteriores nulo.
definición La precesión estacionaria es el movimiento giroscópico que aparece cuando el ángulo de nutación (θ ) y las velocidades de precesión (ψ& ) y rotación propia (ϕ& ) son constantes (Fig. 9.2)
⎪⎩
⎪⎨
⎧
===
cte cte ψ cteθ
ria estacionaprecesión ϕ&&
1'kr
&ϕ
x=x1=x’1 = e’1
y=y1
z=z1
y’1 = e’2
z’1 = e’3
ω
θ k
r&ψ
0i1rr
& =θ
Fig. 9.2 – Giroscopio con precesión estacionaria.
aplicación Las expresiones de velocidad angular del sólido ( 1'z1'y1'xωr
), del sistema de referencia ( 1'z1'y1'xΩr
) y de
la derivada de las componentes de la velocidad angular ( { }111 'z'y'xe
r&ω ) son
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+=
θψθψ
θΩ
θψϕθψ
θω
cossen
cossen
111111 'z'y'x'z'y'x&
&
&r
&&
&
&r
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−++=
θθψθψϕθθψθψ
θω
sencoscossene
111111 'z'y'x'z'y'x&&&&&&
&&&&
&&r
&
y quedan en este caso reducidas a

9.1 Precesión estacionaria en un giroscopio.
- 63/105 -
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+=
ϕθψθψω&&
&r
cossen0
111 'z'y'x ⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
θψθψΩ
cossen0
111 'z'y'x&
&r
{ }⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
000
e111 'z'y'x
r&ω
equilibrio dinámico Con ellas se desarrolla el equilibrio dinámico de forma que cumpla con la ecuación
[ ] { }[ ] { }
43421
rr
44 344 21
&r&rr
r&
ωω
Ω
G
111111
G
111
111
T
'z'y'xG'z'y'x
eT
'z'y'xGGG'z'y'xG HHHM ×+⎟⎟
⎠
⎞⎜⎜⎝
⎛==∑
Expresión que desarrollada en base principal de inercia es
( )( )
( )[ ] ( )[ ][ ] ( )[ ]
( )[ ] [ ] ⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
−
+−
−+
+
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+−
+=
θψθθθψ
θϕθψψθ
θψθψθψϕθψ
ϕθθψθψ
θθψθψ
θ
senIsenI
cosIcosI
cossenIsencosI
sencosI
cossenI
I
H
12
31
23
3
2
1
'e'e
'e'e
'e'e
'e
'e
'e
G
&&&&
&&&&&
&&&&&
&&&&&&
&&&&
&&&r
con lo que sustituyendo en el caso de precesión estacionaria se obtiene
( )[ ] ( )[ ]⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧ −++
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
00
cossenIsencosI
000
H23 'e'e
G
θψθψθψϕθψ &&&&&&r
expresión en la que se anulan todos los términos excepto del eje e’1
Concepto clave
Para que exista equilibrio dinámico de momentos respecto del centro de masas (G) en un sólido con precesión estacionaria, estudiado respecto de un sistema de referencia con movimiento de precesión y nutación (Ge’1e’2e’3), tiene que existir la derivada del momento
angular respecto del centro de masas ( GH&r
) en la dirección del eje giratorio e’1.
nutación de 90º En el caso particular en que el ángulo de nutación sea de 90º (
2πθ = , Fig. 9.3) la expresión anterior se
reduce a
( )[ ] ( )[ ]
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⇒
⎪⎪
⎭
⎪⎪
⎬
⎫
=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧ −+=
00I
H
º90
00
cossenIsencosIH 3
23'e
G
'e'e
G
ϕψ
θ
θψθψθψϕθψ&&
&r
&&&&&&r
1'xM
x=x1=x’1=e’1
y=y1
z=z1 =y’1=e’2
z’1= e’3
ωr
1'kr
&ϕ
kr
&ψ
θ
Fig. 9.3 – Giroscopio con precesión estacionaria y nutación a 90º.

9.1 Precesión estacionaria en un giroscopio.
- 64/105 -
relación giroscópica Este último término es una relación frecuentemente empleada en el movimiento giroscópico y permite obtener
la derivada respecto del tiempo del momento angular ( GH&r
) que se produce en un sólido, conocidas la velocidad de precesión (ψ& ) y de rotación propia (ϕ& ) cuando la velocidad de precesión es perpendicular al eje del rotor ( 2/πθ = ).
A partir de esta expresión
311 'e'eG'eG IHM ϕψ &&& ==∑
se puede deducir que aplicando el equilibrio dinámico, cuando el rotor gira con velocidad angular de rotación propia (ϕ& ) y se produce un momento (
1'eGMr
) en dirección perpendicular, el giroscopio adquiere velocidad de
precesión (ψ& ), anulándose dicha velocidad al cesar el momento exterior.
Ejemplo 9.2: El sólido del ejemplo 5.3 del tema de Cinemática del sólido rígido es un disco homogéneo de masa m=10 kg. y radio R=10 cm. cuyo centro de masas se encuentra en el punto A orientado tal como muestra la figura. El sólido gira con velocidad angular ω1 = 15 rad/s respecto del eje que pasa por A; y al mismo tiempo gira con velocidad angular ω3 = 8 rad/s respecto del eje y. Determinar el sumatorio de momentos respecto del centro de masas del sólido.
B
3
El ejemplo corresponde a una precesión estacionaria con nutación a 90º por lo que la expresión a utilizar es
1'e'eG'eG 'eIHM311
r&&
&rr ϕψ==∑
El estudio se va ha hacer sobre un sistema de referencia con movimiento de precesión y nutación Gx’1y’1z’1, que coincide con el 321 'e'e'Ge de forma que el tensor de inercia másico respecto del c.d.m. no varíe, sistema que aparece en la figura
B
3
xe=z’1
ye=x1=x’1
ze=z1=y’1
y1 θ
ψ
Los parámetros de Euler obtenidos en el problema cinemático son los siguientes

9.1 Precesión estacionaria en un giroscopio.
- 65/105 -
( )
( ) 0s/rad15
002
0s/rad82
==
===
===
ϕϕϕ
θθπθ
ψψπψ
&&&
&&&
&&&
El momento de inercia respecto del eje z’1 del c.d.m. del disco es
( )222'e mkg05,01,010
21mR
21I
G3=⋅==
Luego el momento de las fuerzas exteriores respecto del c.d.m. es
( )mN'e6'e05,0158'eIHM 111'e'eG'eG 311
rrr&&
&rr=⋅⋅===∑ ϕψ
giroscopio experimental El comportamiento de un giroscopio se analiza de forma sencilla con una experiencia de laboratorio (Fig. 9.4). El estudio se desarrolla considerando un sistema de referencia con movimiento de precesión y nutación principal de inercia ( 111 'e'e'Ge ).
Fig. 9.4 – Giroscopio experimental.
elementos El aparato que se va a estudiar consta de los siguientes elementos (Fig. 9.5):
• Una base con un soporte vertical que sostiene un eje por un punto de apoyo O. Este eje está articulado en O permitiendo su libre giro.
• Un disco (giroscopio) grande y pesado que genera un momento de inercia grande respecto del eje axil, y que gira en torno a dicho eje.
• Un contrapeso al otro lado del disco para equilibrar el eje en la posición de equilibrio estático en el que el c.d.m. del sistema se halla en el punto (O) coincidente con el soporte del eje.
• Una pesa (A) que se colocará en uno de los extremos del eje para generar desequilibrio, de forma que el c.d.m. (G) se desplace respecto del punto O.

9.1 Precesión estacionaria en un giroscopio.
- 66/105 -
Eje del giróscopo
Giróscopo
Contrapeso
ψ&
ϕ&
OHr ϕ&
O
Pesa
A
Fig. 9.5 – Elementos de un giroscopio de laboratorio.
características geométricas
Por ser la masa del giroscopio grande, el momento de inercia másico respecto del eje perpendicular al disco (
3'eI ) es mayor que el de cualquier eje perpendicular a él (21 'e'e I,I ).
321 'e'e'e III <<<=
equilibrio estático Se parte de la posición de equilibrio estático del sistema en la que el peso del disco se equilibra con el contrapeso. En ese instante se hace girar el disco con velocidad angular de rotación propia constante (ϕ& ) en la dirección del eje de simetría (e’3) por lo que el equilibrio estático no varía.
Concepto clave Un giroscopio en equilibrio estático al que se aplica una velocidad de rotación propia (ϕ& ) sobre su eje de simetría (e’3) permanece equilibrado.
coordenadas de Euler En esta situación la velocidad angular del sólido (321 'e'e'eω
r), utilizando las coordenadas de Euler en
la base con movimiento de precesión y nutación, será
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=⇒
⎪⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪⎪
⎬
⎫
=
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=
ϕω
ψθ
ϕθψθψ
θ
ωωω
ω
&
r
&
&
&&
&
&r
00
00
cossen
321
1
1
1
321
'e'e'e
'z
'y
'x
'e'e'e
momento angular y el momento angular (321 'e'e'eOH
r) respecto del punto O, punto fijo del sistema es
[ ] { }⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
==
33
2
1
3213'e2'e1'e321
'e'e
'e
'e
'e'e'eO'e'e'eO
I00
00
I000I000I
TH ϕϕ
ω&&
r
equilibrio dinámico Al ser éste momento angular constante, se comprueba que el sumatorio de momentos de las fuerzas exteriores ( ∑ OM
r) respecto del punto O es nulo

9.1 Precesión estacionaria en un giroscopio.
- 67/105 -
0M0HcteH
HMO
OO
OOrr
r&rr
&rr
=⇒⎪⎭
⎪⎬
⎫
=⇒=
=∑
∑
Concepto clave Un giroscopio en equilibrio estático al que se aplica una velocidad de rotación propia (ϕ& ) sobre su eje de simetría (z’1) tiene momento de las fuerzas exteriores nulo respecto del punto de equilibrio (O).
Eje del giróscopo
Giróscopo
Contrapeso
ϕ&
OHr ϕ&O=G
Fig. 9.6 – Giroscopio con rotación propia en equilibrio dinámico.
equilibrio estable Esto indica que el momento angular (321 'e'e'eOH
r) respecto del punto de equilibrio O tiene únicamente una
componente constante, paralela al eje del giroscopio ( 3'e ) y a la velocidad angular del disco (321 'e'e'eω
r),
pudiendo el sistema permanecer en esta situación de forma estable (Fig. 9.6).
desequilibrio Si ahora se coloca una pequeña pesa en A, se produce una variación de la posición del c.d.m. (G) de forma que el sistema se desequilibra debido a su desplazamiento ( OGr −
r). Este desplazamiento genera un
momento en el punto de apoyo O ( OMr ) de magnitud constante y dirección perpendicular tanto al peso del
sistema como a la velocidad de rotación propia (ϕ& ), por lo que el giroscopio pierde la estabilidad anterior (Fig. 9.7).
Eje del giróscopo
Giróscopo
Contrapeso ψ&
ϕ&
O H r ϕ& O
Pesa
A
G
OMr
Peso
1'e
OGr −
r
2'e
3'e
Fig. 9.7 – Comportamiento de un giroscopio de laboratorio desequilibrado.

9.1 Precesión estacionaria en un giroscopio.
- 68/105 -
Concepto clave Si el momento de las fuerzas exteriores del giroscopio ( OMr
) respecto del punto de equilibrio (O) no es nulo, el sistema no es estáticamente estable.
variación del momento angular
A partir de la ecuación de equilibrio dinámico se tiene
dtMHddtHd
HM OOO
OO
rrr
&rr=⇒==
luego el momento de las fuerzas exteriores en O ( OMr
) hace variar el momento angular respecto de dicho
punto ( OHdr
).
Como el momento de las fuerzas exteriores ( OMr
) está contenido en el plano paralelo al terreno, la
variación del momento angular respecto del punto O ( OHdr
) está también en dicho plano, tal como se indica en la Fig. 9.8.
dt M Hd Or r
=
OHr
OO HdHrr
+
O
ψ&
θ
MrO
O
Fig. 9.8 – Variación de un momento angular debido a un momento de las fuerzas exteriores.
El efecto generado por el momento de las fuerzas exteriores ( OMr
) es una variación del momento angular
( OHr
) en la misma dirección que el momento las fuerzas exteriores ( OMr
) y que, tal como se ha visto en la precesión estacionaria con ángulo de nutación (θ ) de 90º, corresponde a la aparición de una velocidad de precesión (ψ& ) en sentido perpendicular al plano definido por el momento de las fuerzas exteriores y el momento angular
31 'e'eO IM ϕψ &&r
=∑
Concepto clave
El momento de las fuerzas exteriores ( OMr
) genera una variación del momento angular
( OHr
) en la dirección del momento, y la aparición de una velocidad de precesión (ψ& ) en el sentido perpendicular al plano generado por el momento de las fuerzas exteriores y el momento angular.
estabilidad Un efecto giroscópico importante es que la dirección del eje de rotación propia (e’3) cuando esta velocidad (ϕ& ) es elevada tiende a mantenerse estable.
Concepto clave Cuando la velocidad de rotación propia (ϕ& ) es elevada, un giroscopio opone resistencia a la variación de su dirección.

9.1 Precesión estacionaria en un giroscopio.
- 69/105 -
aplicación en aviones Este efecto se utiliza para guiar aviones sin referencia con el terreno y sin el uso de brújulas (por ejemplo cuando sobrevuelan los polos, situación en la que las brújulas magnéticas pierden su utilidad). Para ello se utilizan giroscopios mecánicos, de forma que si el anillo más exterior del giroscopio está unido al chasis del avión y éste cambia su dirección, el eje de rotación propia del giroscopio no modifica su orientación, y el movimiento relativo entre el anillo exterior y el eje de rotación propia permite detectar su variación.
1'xM
1'kr
&ϕ
kr
&ψ
θ
kr
&ψ
1'kr
&ϕ
W
G
OMr
O
Fig. 9.9 – Efectos giroscópicos sobre un motociclista.
aplicación en vehículos de dos ruedas
Otro efecto giroscópico sobradamente experimentado es la estabilidad de los vehículos de dos ruedas en movimiento, lo que facilita, junto con la fuerza centrífuga, que un motorista o ciclista puedan mantenerse en equilibrio, a diferencia de lo que ocurre cuando están parados. En este caso son las ruedas del vehículo las que actúan como giroscopios estabilizadores (Fig. 9.9).
Concepto clave La estabilidad giroscópica se manifiesta en el equilibrio dinámico en el movimiento de los vehículos de dos ruedas.
Para que un vehículo de dos ruedas tome una curva a alta velocidad es necesario generar un momento ( OMr
) en sentido perpendicular al eje de rotación propia (ϕ& ) de las ruedas (creado por el peso del vehículo y del piloto cuando se inclinan) por lo que aunque estáticamente el piloto se encuentra completamente desequilibrado (efecto que se puede apreciar al analizar una imagen instantánea del movimiento), dinámicamente el equilibrio existe y el piloto no se cae.
Al inclinarse y generar con el peso un momento ( OMr
) respecto del punto de contacto con el asfalto (O) el piloto provoca la aparición de una velocidad de precesión (ψ& ) que le permite girar respecto de un eje
vertical y trazar una curva. Cuanto más se inclina el vehículo, mayor es el momento ( OMr
) producido por el peso y más elevada es la velocidad de precesión (ψ& ), lo que le permite tomar más rápidamente la curva.
La inclinación del piloto se podrá aumentar siempre que la componente normal del peso en los puntos de contacto entre los neumáticos y el asfalto (O) sea suficiente como para que la fuerza de rozamiento generada evite el deslizamiento de los neumáticos, o el momento generado por el peso supere el equilibrio dinámico debido a la rotación de los neumáticos.
9.1.1. Precesión lenta y rápida. Velocidad mínima de rotación propia.
En el caso de un giróscopo con precesión estacionaria y ángulo de nutación (θ ) arbitrario, estudiado en una base principal de inercia con movimiento de precesión y nutación ( 321 'e'e'e ), la expresión del equilibrio dinámico es

9.1 Precesión estacionaria en un giroscopio.
- 70/105 -
( )[ ] ( )[ ]⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧ −+=∑
00
cossenIsencosIM
23
321
'e'e
'e'e'eG
θψθψθψϕθψ &&&&&r
o bien, aislando la única componente distinta de cero
( )[ ] ( )[ ] θψθψθψϕθψ cossenIsencosIM231 'e'e'eG
&&&&& −+=∑
expresión que puesta en función de la velocidad de precesión (ψ& ) queda
( ) 0MsenIcossenII1323 'eG'e'e'e
2 =−+− ∑θϕψθθψ &&&
y dividiendo por el coeficiente que multiplica a la precesión al cuadrado
( ) ( ) 0cossenII
M
cosIII
23
1
23
3
'e'e
'eG
'e'e
'e2 =−
−−
+∑
θθψ
θ
ϕψ
&
&&
velocidad de precesión fórmula cuadrática a partir de la que se pueden obtener dos velocidades de precesión
( ) ( ) ( )2
cossenII
M4
cosIII
cosIII
23
1
23
3
23
3
'e'e
'eG2
'e'e
'e
'e'e
'e
θθθ
ϕ
θ
ϕ
ψ −
+⎟⎟⎠
⎞⎜⎜⎝
⎛
−±
−−
=
∑&&
&
o simplificando
( )
( )
( )
( )
( )
( )
( ) θ
ϕ
θ
ϕ
θθ
θ
ϕ
θ
ϕ
θ
ϕ
θ
ϕ
ψ
cosIII
2
cosIII
cossenII
M
4
cosIII
cosIII
cosIII
cosIII
23
3
23
3
23
1
23
3
23
3
23
3
23
3
'e'e
'e
2
'e'e
'e
'e'e
'eG
2
'e'e
'e
2
'e'e
'e
'e'e
'e
'e'e
'e
−
⎟⎟⎠
⎞⎜⎜⎝
⎛
−
−+
⎟⎟⎠
⎞⎜⎜⎝
⎛
−
⎟⎟⎠
⎞⎜⎜⎝
⎛
−±
−
−−
=
∑
&
&&
&
&
&
&
( )( )
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡ −+±−
−=
∑22
'e
'e'e'eG
'e'e
'e
3
231
23
3
Isen
cosIIM411
cosII2I
ϕθ
θ
θ
ϕψ
&
&&
expresión con la que se obtendrán dos valores. Al menor se le denomina precesión lenta y al mayor precesión rápida.
Concepto clave La precesión estacionaria se puede producir con velocidad de precesión (ψ& ) lenta o rápida.
velocidad mínima de rotación propia
Para que estos valores sean reales el término dentro del radical ha de ser positivo, luego

9.1 Precesión estacionaria en un giroscopio.
- 71/105 -
( ) ( )22
'e
'e'e'eG22
'e
'e'e'eG
3
231
3
231
Isen
cosIIM410
Isen
cosIIM41
ϕθ
θ
ϕθ
θ&&
−−>⇒>
−+
∑∑
y la condición que ha de cumplir la velocidad mínima de rotación propia ( minϕ& ) para que las velocidades de precesión (ψ& ) con un ángulo de nutación conocido (θ ) sean reales es
( )2'e
'e'e'eG2min
3
231
Itg
IIM4
θϕ
−−>
∑&
Concepto clave Para que la precesión estacionaria tenga velocidades de precesión (ψ& ) reales, la velocidad de rotación propia del giroscopio ha de ser superior a la mínima ( minϕ& ).
Ejemplo 9.3: Un disco homogéneo de masa m=10 kg. y radio R=10 cm. gira con los parámetros de Euler definidos en la tabla
e’3 G
e’2
e’1
( ) 0s/rad15
004
0?2
==
===
==
ϕϕϕ
θθπθ
ψψπψ
&&&
&&&
&&&
y con un momento respecto del eje e’1 de magnitud ( )mN6M1'eG =∑
r. Determinar 1) Las velocidades
de precesión estacionaria lenta y rápida. 2) La velocidad mínima de rotación propia para que la velocidad de precesión sea real.
El ejemplo corresponde a una precesión estacionaria con nutación a 45º por lo que partiendo de la expresión del momento respecto del c.d.m. en base con movimiento de precesión y nutación
( )[ ] ( )[ ]⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧ −+=∑
00
cossenIsencosIM
23
321
'e'e
'e'e'eG
θψθψθψϕθψ &&&&&r
se obtienen las velocidades de precesión lenta y rápida
( )( )
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −+±−
−=
∑22
'e
'e'e'eG
'e'e
'e
3
231
23
3
Isen
cosIIM411
cosII2I
ϕθ
θ
θϕ
ψ&
r&
&
El estudio se va ha hacer sobre un sistema de referencia con movimiento de precesión y nutación Ge’1e’2e’3 de forma que el tensor de inercia másico respecto del c.d.m. no varíe.
Los momento de inercia respecto de los ejes e’2 y e’3 del c.d.m. del disco son
( )222'e mkg025,01,010
41mR
41I
G2=⋅==
( )222'e mkg05,01,010
21mR
21I
G3=⋅==
Luego las velocidades de precesión son lenta y rápida son

9.1 Precesión estacionaria en un giroscopio.
- 72/105 -
( )( )
( )( ) ( ) ( )
( )⎩⎨⎧−
=±−=⎥⎥⎦
⎤
⎢⎢⎣
⎡
⋅⋅−
+±−−
⋅=
=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −+±−
−=
∑
s/rad7,51s/rad28,9
066,2121,211505,0 45sen
45 cos 025,005,0641145 cos 025,005,02
1505,0
Isen
cosIIM411
cosII2I
22
22'e
'e'e'eG
'e'e
'e
3
231
23
3
ϕθ
θ
θϕ
ψ&
r&
&
La condición de velocidad de rotación propia mínima para que las velocidades de precesión lenta y rápida sean reales es que el radical anterior sea positivo
( )0
Isen
cosIIM41 22
'e
'e'e'eG
3
231 >−
+∑
ϕθ
θ&
r
lo que lleva a una expresión
( )2'e
'e'e'eG2mi
3
231
Itg
IIM4
θϕ
−−>
∑r
&
luego sustituyendo valores
( ) ( ) 24005,0 45tg 025,005,064
Itg
IIM4 22
'e
'e'e'eG2min
3
231 −=−
−>−
−>∑
θϕ
r
&
como en este caso todos los términos a la derecha de la desigualdad son positivos, cualquier velocidad de rotación propia cumple con ella y existirán siempre esas velocidades de precesión.
9.1.2. Influencia de la geometría en el movimiento de un sólido de revolución con precesión
estacionaria y momento de las fuerzas exteriores nulo.
En la expresión
[ ] { }[ ] { }
43421
rr
44 344 21
&r&rr
r&
ωω
Ω
G
111111
G
111
111
T
'z'y'xG'z'y'x
eT
'z'y'xGGG'z'y'xG HHHM ×+⎟⎟
⎠
⎞⎜⎜⎝
⎛==∑
es evidente la influencia de la geometría en el equilibrio dinámico del sólido, expresada a través del tensor de inercia másico en el centro de gravedad ( [ ]GT ), sin embargo se va a aplicar a casos simplificados en los que se refleje de forma clara.
Para ello se estudia el movimiento de precesión estacionaria en un sólido con simetría másica respecto de un eje cuando la resultante de momentos de las fuerzas exteriores ( ∑ GM
r) respecto del c.d.m. (G) es nula.
Este caso aparece en aeronaves (considerando el efecto de la resistencia del aire despreciable), satélites artificiales y vehículos espaciales.
influencia de la geometría en el
movimiento
Si se considera un sólido con simetría másica respecto del eje ( 3'e ) en el que se produce el movimiento de rotación propia (ϕ& ) de forma que
21 'e'e II = , que gira con precesión estacionaria, y el estudio se realiza respecto de un sistema de referencia principal de inercia con movimiento de precesión y nutación ( 321 'e'e'e ), y se denominan α y γ los ángulos constantes que forman el momento angular y la velocidad
angular del sólido ( GHr
, ωr
) respectivamente con el eje de simetría ( 3'e , Fig. 9.10), siendo GH el módulo
del momento angular del sólido respecto del c.d.m. (G), la velocidad angular del sólido (ωr
), tal como se indicó anteriormente, es

9.1 Precesión estacionaria en un giroscopio.
- 73/105 -
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=ϕθψ
θψωωω
&&
&r
cossen00
3
2321
'e
'e'e'e'e
y las componentes del momento angular respecto del c.d.m. (321 'e'e'eGH
r) son
[ ] { }⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
==
33
22
3
2
3
2
1
3213'e2'e1'e321
'e'e
'e'e
'e
'e
'e
'e
'e
'e'e'eG'e'e'eG
II
00
I000I000I
TH
ωω
ωωω
r
x=x1=x’1=e’1
y=y1
z=z
y’1 =e’2
z’1=e’3 ωr
GHr
γ
α
Fig. 9.10 – Ángulos de la velocidad angular del sólido y el momento angular del c.d.m.
respecto del eje de simetría axil.
Estas componentes también se pueden poner en función del módulo del momento angular ( GH ) y del ángulo (α) que forman dicho momento y el eje de simetría ( 3'e )
αα
cosHHsenHH0H
G'eG
G'eG
'eG
3
2
1
==
=
luego identificando las componentes
333
222
1
e'e'Ge'G
e'e'Ge'G
e'G
Iωαcos HH Iω senαHH
0H
====
=
El ángulo que forma la velocidad angular del sólido (321 'e'e'eω ) con el eje de simetría ( 1'z ) γ se puede poner
en función de las componentes de la velocidad angular
3
2
'e
'etgωω
γ =
por lo que dividiendo las componentes 2'e y 3'e del momento angular (321 'e'e'eGH
r) se obtiene
relación entre velocidad angular, momento
angular y geometría del sólido
3
2
3
2
3
2
3'e
2'e
333'e
222'e
'e
'e
'e
'e
'e
'e
G
G
'e'eGG
'e'eGG
II
tgII
H
Htg Iωαcos HH
Iω senαHHγ
ωω
α ===⇒⎪⎭
⎪⎬⎫
====
expresión que relaciona los ángulos que forman la velocidad angular (γ ) y el momento angular (α ) respecto del eje de simetría ( 3'e ) con las características geometrías del sólido (
32 'e'e I,I ).

9.1 Precesión estacionaria en un giroscopio.
- 74/105 -
Concepto clave
Si el momento de las fuerzas exteriores respecto del centro de masas es nulo, existe una relación directa entre las componentes del momento angular respecto del centro de masas (
321 'e'e'eGHr
), la velocidad angular del sólido (321 'e'e'eω ) y su geometría (
32 'e'e I,I ).
9.1.2.1. Aplicación a casos particulares.
1- Sólido que gira solo sobre su eje de simetría ( 3'e ).
GHr
y=y1
z=z1
1.
1'z 'krrr
ϕωω ==
x=x1=x’1=e’1
y’1 =e’2
z’1=e’3
Fig. 9.11 – Sólido que gira respecto de su eje de simetría.
En este caso la velocidad angular del sólido (321 'e'e'eGω
r) solo tiene componente según el eje de
simetría ( 3'e , Fig. 9.11), por lo que a partir de expresar las velocidades en la base con movimiento de precesión y nutación en función de los parámetros de Euler, se deduce que la velocidad de precesión es nula
0
cos
sen
0
0
0
3
2
1
3
2
1
'e
'e
'e
'e
'e
'e
=⇒
⎪⎪⎭
⎪⎪⎬
⎫
+=
=
=
⇒
⎪⎪⎭
⎪⎪⎬
⎫
=
=
=
ψ
ϕθψω
θψω
ω
ϕω
ω
ω&
&&
&
&
y las componentes del momento angular (321 'e'e'eGH
r) son
⎪⎪⎩
⎪⎪⎨
⎧
==
==
=
3333
222
1
'e'e'e'eG
'e'e'eG
'eG
IIH
0IH
0H
ϕω
ω
&
con lo que los vectores velocidad angular (321 'e'e'eGω
r) y momento angular del sólido (
321 'e'e'eGHr
)
tienen ambos la dirección del eje de simetría ( 3'e ). Este caso ya se había analizado, y corresponde a
una velocidad angular (321 'e'e'eGω
r) sobre un eje principal de inercia ( 3'e ), por lo que al sólido tiene
un momento angular (321 'e'e'eGH
r) colineal.

9.1 Precesión estacionaria en un giroscopio.
- 75/105 -
2- El sólido gira solo respecto de un eje perpendicular al de simetría ( 2'e ).
x=x1=x’=e’1
y=y1
z=z1= y’1=e’2
z’1=e’3
GHr
γ α
k
1'y
r&
rψωω ==
Fig. 9.12 – Sólido que gira respecto de un eje perpendicular al de simetría.
En este caso la componente 3'e de la velocidad angular del sólido (321 'e'e'eGω
r) es nula y el ángulo de
nutación es 2/πθ = (Fig. 9.12), por lo que
⎪⎩
⎪⎨⎧
=
=⇒
⎪⎪⎭
⎪⎪⎬
⎫
+=
=
=
⇒
⎪⎪⎭
⎪⎪⎬
⎫
=
=
=
2
0
cos
sen
0
0
0
3
2
1
3
2
1
'e
'e
'e
'e
'e
'e
πθ
ϕ
ϕθψω
θψω
ω
ω
ψω
ω &
&&
&&
y las componentes del momento angular (321 'e'e'eGH
r) vienen expresadas por
⎪⎪⎩
⎪⎪⎨
⎧
==
==
=
0IH
IIH
0H
333
2222
1
'e'e'eG
'e'e'e'eG
'eG
ω
ψω &
con lo que los vectores velocidad angular (321 'e'e'eGω
r) y momento angular del sólido (
321 'e'e'eGHr
)
tienen la orientación del eje 2'e . Vuelve a ser el caso en el que la velocidad angular (321 'e'e'eGω
r) está
situada sobre un eje principal de inercia ( 2'e ), por lo que al sólido le corresponde un momento
angular (321 'e'e'eGH
r) colineal.
3- El sólido gira respecto de un eje que no es principal de inercia.
Si se considera el caso general en el que la velocidad angular del sólido (321 'e'e'eGω
r) no se encuentra
sobre ninguno de los ejes principales de la base con movimiento de precesión y nutación ( 321 'e'e'e , Fig. 9.13) se cumple la expresión
3
2
'e
'e
II
tgtg γα =

9.1 Precesión estacionaria en un giroscopio.
- 76/105 -
k. r
ψ
1
.'kr
ϕ
1'yω
1'zω
y=y1
ωr
γ
α GHr
z= z1
x=x1=x’1=e’1
y’1 =e’2
z’1=e’3
Fig. 9.13 – Sólido que gira respecto de un eje arbitrario.
La representación del movimiento mediante axoides permite determinar claramente la influencia de la geometría en el movimiento del sólido.
En este tipo de movimiento, ambos axoides son conos de base circular, siendo el eje en el que se sitúa la velocidad angular del sólido (
321 'e'e'eGωr
) la arista de contacto.
El eje de simetría del cono, correspondiente al axoide fijo, es la dirección del momento angular (
321 'e'e'eGHr
), ya que se mantiene invariable en el espacio, mientras que el eje de simetría del cono
correspondiente al axoide móvil es la velocidad de rotación propia ( 3'e ), que coincide con el eje de simetría del sólido.
Concepto clave
En la representación de movimiento de un sólido mediante axoides, el eje de simetría del cono correspondiente al axoide fijo es la dirección del momento angular (
321 'e'e'eGHr
),
mientras que el eje de simetría del cono correspondiente al axoide móvil es la velocidad de rotación propia (ϕ& ), que coincide con el eje de simetría del sólido ( 3'e ).
En función de la geometría que presente el sólido se pueden tener dos posibles tipos de movimiento:
1- Sólido alargado (32 'e'e II > ).
En este caso el momento de inercia respecto del eje perpendicular al de simetría (2'eI ) es mayor
que el del eje de simetría (3'eI ), por lo que
1II
II3
2
32'e
'e'e'e >⇒>
luego aplicando la expresión que relaciona los ángulos que forman la velocidad angular (γ ) y el momento angular (α ) respecto del eje de simetría ( 3'e ) con las características geometrías del sólido (
2'eI , 3'eI ) se tiene
γαγαγα >⇒>⇒= tgtgII
tgtg3
2
'e
'e
con lo que el ángulo (α) que sitúa el momento angular ( GHr
) es mayor que el ángulo (γ) que sitúa la velocidad angular del sólido ( Gω
r, Fig. 9.14) y los axoides son externos entre sí.

9.1 Precesión estacionaria en un giroscopio.
- 77/105 -
ψ& ϕ&
1'yω
1'zω
y=y1
ωr
γ α
Axoide fijo
Axoide móvil
GHr
z= z1
x=x1=x’1=e’1
y’1 =e’2
z’1=e’3
Fig. 9.14 – Axoides para el caso de sólido alargado.
Concepto clave
En la representación de movimiento de un sólido alargado con movimiento de precesión estacionaria y momento nulo respecto del centro de masas mediante axoides, estos son tangentes externos y las velocidades de rotación propia (ϕ& ) y precesión (ψ& ) antihorarias. En este caso se dice que la precesión es directa.
2- Sólido achatado (32 'e'e II < ).
En este caso el momento de inercia respecto del eje perpendicular al de simetría (2'eI ) es menor
que el correspondiente al eje de simetría (3'eI ), por lo que
1II
II3
2
32'e
'e'e'e <⇒<
luego aplicando la expresión que relaciona los ángulos que forman la velocidad angular (γ ) y el momento angular (α ) respecto del eje de simetría ( 3'e ) con las características geometrías del sólido (
2'eI , 3'eI ) se tiene
γαγαγα <⇒<⇒= tgtgII
tgtg3
2
'e
'e
con lo que el ángulo (α) que sitúa el momento angular ( GHr
) es menor que el ángulo (γ) que sitúa la velocidad angular del sólido ( Gω
r, Fig. 9.15) y el axoide fijo es interior al axoide móvil.
k. r
ψ
1
.'kr
ϕ
1'yω
1'zω y=y1
z=z1
ωr
γ
α
Axoide fijo
Axoide móvil x=x1=x’1=e’1
y’1 =e’2
z’1=e’3
GHr
Fig. 9.15 – Axoides para el caso de sólido achatado.

9.1 Precesión estacionaria en un giroscopio.
- 78/105 -
Concepto clave En la representación de movimiento de un sólido acharado mediante axoides, los axoides son tangentes internos estando el axoide fijo en el interior del axoide móvil. En este caso se dice que la precesión es inversa.
Ejemplo 9.4: Si un disco homogéneo de masa m=10 kg. y radio R=10 cm. tiene momento de las fuerzas exteriores respecto del centro de masas nulo, determinar si el axoide fijo es interior o exterior al móvil.
El ejemplo corresponde a una precesión estacionaria por lo que habrá que utilizar la expresión
3
2
'e
'e
II
tgtg γα =
en la que es necesario conocer la relación entre momentos de inercia. En este caso los momentos de inercia respecto del c.d.m. del disco son
( )222'e mkg025,01,010
41mR
41I
2=⋅== ( )222
'e mkg05,01,01021mR
21I
3=⋅==
luego
15,005,0
025,0II
3
2
'e
'e <==
que corresponde a un sólido achatado
1II
II3
2
32'e
'e'e'e <⇒<
por lo que se tiene que
γαγαγα <⇒<⇒= tgtgII
tgtg3
2
'e
'e
con lo que el ángulo (α) que sitúa el momento angular ( GHr
) es menor que el ángulo (γ) que sitúa la velocidad angular del sólido ( Gω
r) y el axoide fijo es interior al axoide móvil.
k. r
ψ
1
.'kr
ϕ
1'yω
1'zω y=y1
z=z1
ωr
γ
α
Axoide fijo
Axoide móvil x=x1=x’1=e’1
y’1 =e’2
z’1=e’3
GHr

9.1 Precesión estacionaria en un giroscopio.
- 79/105 -
9.1.3. Movimiento de un sólido de revolución con precesión estacionaria y momento de las fuerzas
exteriores nulo (modelo de Poinsot).
momento angular constante y recta
invariante
Se analiza el caso de un sólido afectado por un movimiento de precesión estacionaria en el que el momento de las fuerzas exteriores respecto del c.d.m. es nulo. En este caso el momento angular del sólido respecto del c.d.m. ( GH
r) es constante (tanto en módulo como en dirección)
cteH0HM GGG =⇒==∑rr&rr
velocidad angular constante respecto de
321 'e'e'e
Al mismo tiempo, la velocidad angular respecto del sistema de referencia con movimiento de precesión y nutación en base principal de inercia (
321 'e'e'eωr
) de expresión
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+=
ϕθψθψω&&
&r
cossen0
321 'e'e'e
velocidad angular variable respecto de un
sistema de referencia con movimiento de
traslación
también es constante, aunque dicha velocidad no lo es respecto de un sistema de referencia solidario al c.d.m. y con movimiento de traslación, debido a la variación del ángulo de precesión (ψ ).
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+−+
=θϕψ
θψϕψθθψϕψθ
ω
cossencossensensencos
xyz&&
&&
&&r
energía cinética de rotación constante
La energía cinética de rotación se ha definido respecto de una referencia solidaria al c.d.m. del sólido con movimiento de traslación (Gxyz) mediante la expresión
{ } { } ( )yzzyxzzxxyyxz2zy
2yx
2xG
trc I2I2I2III
21H
21E ωωωωωωωωωω −−−++=⋅=
por lo que aplicada al caso de precesión estacionaria en ejes no giratorios principal de inercia, en la que se cumple que los centrífugos son nulos ( 0III yzxzxy === ), es
( )332211 e
2ee
2ee
2e
r.princbase,c III
21E ωωω ++=
y como la velocidad angular en ese sistema de referencia en el que los ejes no giran, equivalente al fijo de Euler, puesta en función de sus parámetros es
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+=⇒
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+−+
=
θϕψθψϕθψϕ
ω
θ
θϕψθψϕψθθψϕψθ
ω
cossencossensen
0
cossencossensensencos
.est.prec,eeeeee
321
321
&&
&
&r
&
&&
&&
&&r
la energía cinética queda
( ) ( ) ( )[ ]321 e
2e
2e
2r.princbase,c IcosIsencosIsensen
21E θϕψθψϕθψϕ &&&& +++=
sólido de revolución como esta expresión se aplica a un sólido de revolución respecto del eje 3er
(21 ee II = ), se tiene

9.1 Precesión estacionaria en un giroscopio.
- 80/105 -
( ) ( )[ ] ( )[ ]( )[ ] cteIcosIsen
21
IcosIsencossensen21E
32
32
e2
e22
e2
e22r
.princbase,c
=++=
=+++=
θϕψθϕ
θϕψθψϕθψϕ
&&&
&&&&
que demuestra que la energía cinética debido al efecto de rotación del sólido ( rcE ) es constante.
Concepto clave Si el momento de las fuerzas exteriores respecto del centro de masas es nulo, el momento angular, el módulo de la velocidad angular y la energía cinética de rotación son constantes.
proyección de la velocidad angular del
sólido sobre el momento angular
constante
A partir de lo anterior se comprueba que la proyección de la velocidad angular del sólido (ωr
) sobre el momento angular respecto del c.d.m. ( GH
r) también es constante (Fig. 9.16)
{ } { } { } { } cteHcteH21E G
tG
trc =⋅⇒=⋅= ωω
Lo que solo es posible si el módulo de la velocidad angular (ω) es constante
x
kr
&ψ 1'Zω
y
=e’3
GHr
z= z1
1'kr
&ϕ
G
x1=x’1=e’1
y1
y’1=e’2
1'yω
ωr
Plano invariante
Recta invariante
Fig. 9.16 – Proyección de la velocidad angular del sólido sobre el momento angular.
Recta y plano invariante.
unitario asociado a la dirección de la
velocidad angular
Como ya se ha indicado, la energía cinética de rotación ( rcE ) es constante, aunque la velocidad angular del
sólido (ωr
) respecto de un sistema fijo no lo es, por lo que, como el momento angular y el módulo de la
velocidad angular ( ω,HG
r) son constantes lo único que varía es la dirección de la velocidad angular del
sólido ( ωer
).
velocidad angular perpendicular al
momento angular
Se demuestra entonces que la variación de la dirección de la velocidad del sólido ( ωedr
) es perpendicular
al momento angular ( GHr
)
{ } { } { } { } { } { }Gt
Gtr
crc
Gtr
c Hd21Hd
21dE
0dE
cteH21E
⋅+⋅=⇒⎪⎭
⎪⎬
⎫
=
=⋅=ωω
ω
y como el momento angular ( GHr
) y el módulo de la velocidad angular (ω ) son constantes

9.1 Precesión estacionaria en un giroscopio.
- 81/105 -
{ } { } { } { }{ } { } { } { } { }GG
trcG
Gt
Gtr
c
Hed0Hed21dE
ctee
cteH
Hd21Hd
21dE
⊥⇒=⋅=⇒
⎪⎪
⎭
⎪⎪
⎬
⎫
≠=
=
⋅+⋅=
ωω
ω
ω
ωω
ωωrr
rr
plano invariante Como la velocidad angular del sólido (ωr
) gira respecto del eje fijo asociado al momento angular ( GHr
) y su variación es perpendicular al momento angular, el extremo del vector velocidad angular ha de estar situado sobre un plano fijo perpendicular al momento angular ( GH
r), denominado plano invariante, tal
como se representa en la figura Fig. 9.16.
Concepto clave Si el momento de las fuerzas exteriores respecto del centro de masas en un sólido de simetría axial con precesión estacionaria es nulo, la velocidad del sólido puede variar siempre que sea en dirección perpendicular al momento angular.
elipsoide de Poinsot El desarrollo de la proyección de la velocidad angular del sólido (ωr
) sobre el momento angular respecto del c.d.m. ( GH
r) en base principal de inercia corresponde al doble de la energía cinética del sólido debido
al movimiento de rotación ( rcE )
{ } { } { } { } { } ( )332211
33
22
11
321 'e2'e'e
2'e'e
2'e
'e'e
'e'e
'e'e
'e'e'eGtr
cGtr
c III
I
I
I
HE2H21E ωωω
ω
ω
ω
ωωωωω ++=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
⋅=⋅=⇒⋅=
expresión que también se puede poner
( ) 1
IE2
IE2
IE2
'FIIIE2
3
3
2
2
1
1
332211
'e
rc
2'e
'e
rc
2'e
'e
rc
2'e
'e2'e'e
2'e'e
2'e
rc −++=⇒++=
ωωωωωω
que corresponde a un elipsoide denominado de Poinsot (Fig. 9.17) que tiene de semiejes
321 'e
rc
'e
rc
'e
rc
IE2
IE2
IE2
3'e
GHr
G
ωr
Plano invariante
Recta invariante
Elipsoide de Poinsot
kr
&ψ 3eω
e’1
e’2
2eω
1'kr
&ϕ
u
Fig. 9.17 – Elipsoide de Poinsot.

9.1 Precesión estacionaria en un giroscopio.
- 82/105 -
elipsoide de inercia Recordando las características geométricas de un sólido, la expresión del elipsoide de inercia (Fig. 9.18) es
1
I1'e
I1'e
I1'e1'eI'eI'eI
321
321
'e
23
'e
22
'e
212
3'e22'e
21'e =++⇒=++
de semiejes
321 'e'e'e I1
I1
I1
por lo que se comprueba que el elipsoide de inercia es proporcional al de Poinsot. Esto lleva a que el análisis realizado a continuación sea válido para cualquiera de los dos elipsoides.
3'e
GHr
G
ωr
Plano invariante
Recta invariante
Elipsoide de Poinsot
kr
&ψ 3eω
e’1
e’2
2eω
1'kr
&ϕ
Elipsoide de inercia
Plano invariante
M
Fig. 9.18 – Elipsoide de inercia.
coordenadas del polo M Las coordenadas del polo M, punto de intersección del elipsoide de inercia con el vector velocidad angular (ωr
), en función de la distancia desconocida GM, vienen definidas por
1'e1lGMM 'e ω=
2'e2mGMM 'e ω=
3'e3nGMM 'e ω=
en la que las componente unitarias viene definidas mediante
ω
ω
ω
ω
ω
ωωωω
3
3'e
2
2'e
1
1'e
'e'e'e nml ===
La distancia GM se obtiene a partir de la condición de que el polo M ha de pertenecer al elipsoide de inercia, luego
( ) ( ) 1nGMImGMIlGMI
nGMM
mGMM
lGMM
1'eI'eI'eI
2
'e2
'e2
'e
'e
'e
'e
23'e
22'e
21'e
3'e32'e21'e1
3'e3
2'e2
1'e1
321
=⎟⎠⎞⎜
⎝⎛++⇒
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
=
=
=
=++
ωωω
ω
ω
ω
o bien

9.1 Precesión estacionaria en un giroscopio.
- 83/105 -
22
'e2
'e2
'eGM
1nImIlI3'e32'e21'e1
=++ ωωω
el término a la izquierda de la igualdad corresponde al momento de inercia del sólido (ωeI ) respecto de la
dirección de la velocidad angular ( ωer
), definido mediante
[ ]{ }[ ] { } 2'e
2'e
2'e
'e
'e
'e
e 3'e32'e21'e1
3'e
2'e
1'e
3'e
2'e
1'e
3
2
1
nImIlI
n
m
l
n
m
l
I000I000I
eeTI ωωω
ω
ω
ω
ω
ω
ω
ωωω++=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
⋅
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=⋅=rr
luego
ω
ω
ω
ωωω
ωωω
e2e
22
'e2
'e2
'e
2'e
2'e
2'ee
I1GM
GM1I
GM1nImIlI
nImIlII
3'e32'e21'e1
3'e32'e21'e1
=⇒=⇒⎪⎭
⎪⎬
⎫
=++
++=
o bien, en función de la energía cinética de rotación ( rcE )
( )rc2
ee2ee
2ee
rc
2ee
2ee
2ee
2'e
2'e
2'ee
E2GM
III21E
IIInImIlI
1I1GM
332211
3322113'e32'e21'e1ω
ωωω
ωωω
ω
ωωωω =⇒
⎪⎪
⎭
⎪⎪
⎬
⎫
++=
++=
++==
por lo que las componentes del polo M son
rc
'e'e'e
E2GMM 11
1
ωω
ω==
rc
'e'e'e
E2GMM 22
2
ωω
ω==
rc
'e'e'e
E2GMM 33
3
ωω
ω==
gradiente del elipsoide por el polo M
Si se considera la función asociada al elipsoide de inercia
1'eI'eI'eIF 23'e
22'e
21'e 321
−++=
la variación respecto de las componentes 321 'ey'e,'e es
( ) 1'e23'e
22'e
21'e
11
'eI21'eI'eI'eI'e'e
F1321
=−++∂
∂=
∂
∂ 2'e2
'eI2'eF
2=
∂
∂ 3'e3
'eI2'eF
3=
∂
∂
correspondientes a las componentes del gradiente de F, normal al elipsoide en cada punto
( ) 33'e22'e11'e33
22
11
321 'e'eI2'e'eI2'e'eI2'e'eF'e
'eF'e
'eF'e,'e,'eFgrad
321
rrrrrr++=
∂
∂+
∂
∂+
∂
∂=
→
que aplicado al polo M, intersección de la velocidad angular con el elipsoide de inercia, se obtiene la normal al elipsoide por dicho punto
( ) 3rc
'e'e2r
c
'e'e1r
c
'e'e3
32
21
1'e'e'e 'e
E2I2'e
E2I2'e
E2I2'e
'eF'e
'eF'e
'eFM,M,MFgrad 3
3
2
2
1
1321
rrrrrr ωωω++=
∂
∂+
∂
∂+
∂
∂=
→
gradiente por el polo paralelo al momento
angular
Como el momento angular respecto del c.d.m. ( GHr
) es

9.1 Precesión estacionaria en un giroscopio.
- 84/105 -
3'e'e2'e'e1'e'eG 'eI'eI'eIH332211
rrrrωωω ++=
se comprueba que el gradiente al elipsoide de inercia por el polo y el momento angular son paralelos.
ecuación del plano invariante
La ecuación del plano invariante, cuya dirección normal es el gradiente por el polo M, se puede expresar mediante
0D'eC'eB'eA 321 =+++
donde A, B y C son las componentes de la normal al plano y 321 'e,'e,'e las componentes del sistema de referencia de estudio.
Sustituyendo las componentes de la normal por las del gradiente del elipsoide de inercia por el polo M queda
0D'eE2
I2'e
E2
I2'e
E2
I23r
c
'e'e2r
c
'e'e1r
c
'e'e 332211 =+++ωωω
sustituyendo las componentes 321 'e,'e,'e por las correspondientes al polo (M) se obtiene el parámetro D
0DE2E2
I2
E2E2
I2
E2E2
I2
E2M
E2M
E2M
0D'eE2
I2'e
E2
I2'e
E2
I2
rc
'e
rc
'e'e
rc
'e
rc
'e'e
rc
'e
rc
'e'e
rc
'e'e
rc
'e'e
rc
'e'e
3rc
'e'e2r
c
'e'e1r
c
'e'e
333222111
3
3
22
11
332211
=+++
⇒
⎪⎪⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪⎪⎪
⎬
⎫
=
=
=
=+++
ωωωωωω
ω
ω
ω
ωωω
y simplificando
( )2'e'e
2'e'e
2'e'er
crc
2'e'e
rc
2'e'e
rc
2'e'e
332211
332211 IIIE1D0D
E2
I2
E2
I2
E2
I2ωωω
ωωω++−=⇒=+++
y como la energía cinética de rotación es
( )2'e'e
2'e'e
2'e'e
rc 332211
III21E ωωω ++=
el parámetro D queda
( )
( )2D
III21E
IIIE1D
2'e'e
2'e'e
2'e'e
rc
2'e'e
2'e'e
2'e'er
c
332211
332211
−=⇒
⎪⎪⎭
⎪⎪⎬
⎫
++=
++−=
ωωω
ωωω
con lo que la ecuación del plano es
0E2'eI'eI'eI02'eE2
I2'e
E2
I2'e
E2
I2rc3'e'e2'e'e1'e'e3r
c
'e'e2r
c
'e'e1r
c
'e'e332211
332211 =−++⇒=−++ ωωωωωω

9.1 Precesión estacionaria en un giroscopio.
- 85/105 -
distancia del plano invariante al c.d.m.
La distancia del plano invariante al origen del sistema de referencia situado en el c.d.m. del sólido se obtiene dividiendo la ecuación del plano por el módulo de las componentes normal al plano
222321
CBA
D'eC'eB'eAd++
+++=
mientras que las componentes unitarias del vector normal sustituidas en el plano invariante son
2'e
2'e
2'e
2'e
2'e
2'e
rc
222
2'e
2'e
2'e
2'e
2'e
2'e
'e'e
222
2'e
2'e
2'e
2'e
2'e
2'e
'e'e
222
2'e
2'e
2'e
2'e
2'e
2'e
'e'e
222
332211
332211
33
332211
22
332211
11
III
E2
CBA
D
III
I
CBA
C
III
I
CBA
B
III
I
CBA
A
ωωω
ωωω
ω
ωωω
ω
ωωω
ω
++
−=
++
++=
++
++=
++
++=
++
y la distancia es
222322222221222 CBA
D'eCBA
C'eCBA
B'eCBA
Ad++
+++
+++
+++
=
que aplicada en el origen del sistema de referencia 0'e'e'e 321 === , permite determinar la distancia
2'e
2'e
2'e
2'e
2'e
2'e
rc
222332211
III
E2
CBA
Ddωωω ++
=++
=
en la que el denominador es el módulo del momento angular respecto del c.d.m. en base principal de inercia
{ } 2'e
2'e
2'e
2'e
2'e
2'eG3'e'e2'e'e1'e'eG 332211332211
IIIH'eI'eI'eIH ωωωωωω ++=⇒++=rrr
y la distancia al c.d.m. es
G
rc
2'e
2'e
2'e
2'e
2'e
2'e
rc
HE2
III
E2d
332211
=++
=ωωω
con lo que se comprueba que también permanece constante durante el movimiento.
modelo de Poinsot Con todas estas características, Poinsot genero un modelo en el que el movimiento del sólido es el mismo que el del elipsoide de inercia, que rueda sobre el plano invariante sin deslizar por su polo de contacto M, manteniendo constante la distancia (d) de su centro (G) al plano.
El movimiento del polo M genera dos curvas, una sobre el plano invariante denominada herpolhodia, y la otra sobre el elipsoide de inercia denominada polhodia.
ecuación de la polhodia La ecuación de la polhodia sobre el elipsoide de inercia se obtiene de la intersección del elipsoide de inercia
1'eI'eI'eI 23'e
22'e
21'e 321
=++
con la condición de que la distancia del polo M al plano invariante sea constante y positiva, que denominaremos 'G/1 (Fig. 9.19)

9.1 Precesión estacionaria en un giroscopio.
- 86/105 -
'GE2'eI'eI'eI
'G1d
'eI'eI'eI
E2d
rc
23
2'e
22
2'e
21
2'e
23
2'e
22
2'e
21
2'e
rc
321321 =++⇒
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
=
++=
para simplificar, al término 'GE2 rc , relacionado con la energía cinética de rotación y la distancia del polo
M al plano invariante, se va a denominar G, luego la expresión anterior queda
G'eI'eI'eI 23
2'e
22
2'e
21
2'e 321
=++
y las ecuaciones que ha de cumplir la polhodia son las del elipsoide de inercia y las de la distancia del plano invariante al polo constante
G'eI'eI'eI
1'eI'eI'eI23
2'e
22
2'e
21
2'e
23'e
22'e
21'e
321
321
=++
=++
multiplicando la primera por G y restando las igualdades se tiene
( ) ( ) ( ) 0'eIGI'eIGI'eIGIG'eI'eI'eI
G'eIG'eIG'eIG23'e'e
22'e'e
21'e'e2
32'e
22
2'e
21
2'e
23'e
22'e
21'e
332211
321
321 =−+−+−⇒⎪⎭
⎪⎬⎫
=++
=++
ecuación del axoide móvil
expresión que representa un cono con vértice en el origen de referencia, correspondiente al axoide móvil del sólido.
e1
e2
e3
d
Fig. 9.19 – Elipsoide de inercia, polo, polhodia y herpolhodia.
9.1.3.1. Análisis del movimiento en función del axoide móvil.
Si se considera un sólido de revolución respecto del eje de rotación propia con movimiento de precesión estacionaria y momento de las fuerzas exteriores nula respecto del c.d.m. en el que la relación entre los momentos principales de inercia es
321 'e'e'e III <<
se puede analizar el movimiento del sólido a partir de las polhodias que aparecen sobre el elipsoide de inercia, y que dependerán de las características geométricas, y de la constante G.
Se pueden distinguir distintos casos:

9.1 Precesión estacionaria en un giroscopio.
- 87/105 -
1- La constante G es igual al momento de inercia intermedio 2'eIG = .
En este caso, la expresión del axoide móvil queda
( ) ( ) ( ) ( ) ( ) 0'eIGI'eIGI0IG
0'eIGI'eIGI'eIGI 23'e'e
21'e'e
'e
23'e'e
22'e'e
21'e'e
3311
2
332211 =−+−⇒⎪⎭
⎪⎬⎫
=−
=−+−+−
ecuación que representa dos planos que pasan por el eje e’2 y dividen a la superficie del elipsoide en cuatro zonas. El coeficiente que multiplica a 2
1'e ( )1'eIG − es positivo mientras el que multiplica a 2
3'e ( )3'eIG −
es negativo, por lo que la polhodia puede ser cualquiera de las dos elipses correspondientes a la intersección del elipsoide con los planos anteriores (Fig. 9.20).
e’1e’2
e’3
2'eIG =
2'eIG =
321 'e'e'e IGIIZona <<< 3'eIGPunto =
1'eIGPunto =
321 'e'e'e IIGIZona <<<
321 'e'e'e IGIIZona <<<
321 'e'e'e IIGIZona <<<
Fig. 9.20 – Polhodias.
2- La constante G está entre los valores 2'eI y
3'eI . 321 'e'e'e IGII <<<
En este caso son positivos los coeficientes de 21'e ( )
1'eIG − y 22'e ( )
2'eIG − , mientras que es negativo el de 23'e ( )
3'eIG − , lo cual corresponde a un cono cuya intersección con el elipsoide de inercia son curvas
cerradas que rodean al eje 3'e . Estas curvas degeneran en los vértices de 3'e cuando 3'eIG = .
3- La constante G está entre los valores 1'eI y
2'eI . 321 'e'e'e IIGI <<<
En este caso el único coeficiente positivo es el de 21'e ( )
1'eIG − , lo que indica que las polhodias son curvas
cerradas que rodean al eje 1'e , y que degeneran el los vértices de 1'e cuando 1'eIG = .

9.1 Precesión estacionaria en un giroscopio.
- 88/105 -
4- La constante G es igual al momento de inercia máximo 1'eI o mínimo
3'eI 1'eIG = o
3'eIG = .
En estos casos las polhodias degeneran en los vértices del elipsoide y corresponden a movimientos de pivotamiento de éste sobre el plano fijo. El sólido gira entonces alrededor de los ejes 1'e o 3'e , respectivamente.
Se observa además que si varían ligeramente las condiciones iniciales, se pasa de polhodias puntuales a curvas que rodean los vértices, por lo que el movimiento no variará mucho de la rotación del elipsoide respecto del eje, por lo que estas rotaciones son estables.
Al girar el sólido respecto del eje 2'e y variar su movimiento ligeramente, esta variación lleva a polhodias que rodean a los ejes 1'e o 3'e , con lo que se genera un movimiento que difiere mucho de la rotación respecto del eje 2'e , por lo que estas rotaciones son inestables.

ANEXO 1 Bibliografía
- 89/105 -
9.2. Análisis de estabilidad de un sólido con momento nulo ante una perturbación.
Capacidades a desarrollar en el aprendizaje
Obtener las ecuaciones de equilibrio dinámico en base con movimiento de precesión, nutación y rotación propia en sistemas con momento de las fuerzas exteriores respecto del centro de masas nulo.
Rectificar las ecuaciones de equilibrio dinámico en el caso en que aparezca una perturbación. Resolver ecuaciones diferenciales acopladas. Analizar el comportamiento del sistema en función del eje principal de inercia en el que se produce la
perturbación. Aplicar a casos de geometría sencilla.
estudio en base principal de inercia con
movimiento de precesión, nutación y
rotación propia
Se analiza la estabilidad del movimiento giroscópico a partir de las ecuaciones diferenciales que lo rigen. En este caso el estudio se realiza respecto de la base solidaria al sólido con movimiento de precesión, nutación y rotación propia ( 111 z''y''x'' ) de forma que las velocidades angulares del sólido y del sistema de referencia sean iguales y sobre ejes principales de inercia (se utilizará la notación 111 z''y''x'' , considerando estos ejes principales de inercia).
Cuando un sólido rígido gira respecto de uno de sus ejes principales de inercia ( 111 z''y''x'' ) el movimiento tiende a mantener su orientación, por lo que algunos autores les denominan ejes de rotación permanentes.
definición de movimiento estable
Se considera movimiento estable aquel que recupera por sí mismo su posición inicial o realiza oscilaciones respecto a dicha posición tras someter al sólido a una pequeña perturbación.
Concepto clave Movimiento estable es aquel que recupera por sí mismo su posición inicial o realiza oscilaciones respecto a dicha posición.
Si el sumatorio de los momentos de las fuerzas exteriores respecto del c.d.m. del sólido (∑ GMr
) es nulo,
el momento angular del sólido respecto de dicho punto ( GHr
) es constante
cteH0HM GG
.
G =⇒==∑rrrr
equilibrio dinámico luego a partir del equilibrio de momentos
[ ] { }[ ] { }
0HHHM
G
111111
G
111
111
T
''z''y''xG''z''y''x
eT
''z''y''xGGG''z''y''xG
r
43421
rr
44 344 21
&r&rr
r&
=×+⎟⎟⎠
⎞⎜⎜⎝
⎛==∑
ωω
Ω
velocidad angular del sólido y del sistema
en el que la velocidad angular del sólido (111 ''z''y''xω
r) y del sistema de referencia (
111 ''z''y''xΩr
) coinciden, y cuyas componentes son
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+−+
==⇒++=θψϕ
ϕθϕθψϕθϕθψ
Ωωϕθψω
cos
sencossencossensen
'kik111111 ''z''y''x''z''y''x11
&&
&&
&&rrr
&r&
r&
r
derivadas de las componentes de la velocidad angular
mientras que la derivada de las componentes de la velocidad angular ( { }er
&ω ) se obtienen de dicha
velocidad (ωr
)

ANEXO 1 Bibliografía
- 90/105 -
{ }⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
−+−−−+−+++
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=θθψθψϕ
ϕϕθϕθϕθϕψϕθθψϕθψϕϕθϕθϕθϕψϕθθψϕθψ
ωωω
ω
sencoscossensensencoscoscossensencoscossensencossensen
e
1
1
1
'z
'y
'x
&&&&&&
&&&&&&&&&&
&&&&&&&&&&
&
&
&r
&
Aunque por clarificar se han identificado las componentes de la velocidad angular del sólido y del sistema de referencia y su derivada respecto del tiempo ( e,,
r&
rrωΩω ) en función de los ángulos de Euler ( ϕθψ ,, ),
no se van a sustituir en los desarrollos posteriores.
Como se ha indicado se el tensor de inercia ( [ ]GT ) está asociado a la base principal, por lo que
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
11
11
11
1
1
1
1
1
1
G1
G1
G1
''z''z
''y''y
''x''x
''z
''y
''x
''z
''y
''x
''z
''y
''x
III
I000I000I
H
H
H
ωωω
ω
ω
ω
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=⎟⎟⎠
⎞⎜⎜⎝
⎛
11
11
11
1
1
1
1
1
1
G1
G1
G1
111 ''z''z
''y''y
''x''x
''z
''y
''x
''z
''y
''x
''z
''y
''x
''z''y''xGG
III
I000I000I
H
H
H
Hωωω
ω
ω
ω
&
&
&
&
&
&
&
&
&
&r
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−−
=
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−−
==×
111111
111111
111111
1G11G1
1G11G1
1G11G1
G1G1G1
111111111
''y''x''x''x''y''y
''x''z''z''z''x''x
''z''y''y''y''z''z
''y''x''x''y
''x''z''z''x
''z''y''y''z
''z''y''x
''z''y''x
111
'z'y'xG''z''y''x
IIIIII
HHHHHH
HHH
'k'j'iH
ΩωΩωΩωΩωΩωΩω
ΩΩΩΩΩΩ
ΩΩΩΩ
rrr
rr
equilibrio dinámico y la expresión del equilibrio dinámico es
[ ] { }[ ] { }
0IIIIII
III
HHHM
111111
111111
111111
11
11
11
G
111111
G
111
111
''y''x''x''x''y''y
''x''z''z''z''x''x
''z''y''y''y''z''z
''z''z
''y''y
''x''x
T
''z''y''xG''z''y''x
eT
''z''y''xGGG''z''y''xG
r
&
&
&
43421
rr
44 344 21
&r&rr
r&
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−−
+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=
=×+⎟⎟⎠
⎞⎜⎜⎝
⎛==∑
ΩωΩωΩωΩωΩωΩω
ωωω
Ω
ωω
como la velocidad angular del sistema de referencia (111 ''z''y''xΩ
r) y del sólido (
111 ''z''y''xωr
) son iguales, la expresión anterior en componentes es
( )( )( ) 0IIIM
0IIIM
0IIIM
1111111
1111111
1111111
''y''x''y''x''z''z''zG
''x''z''x''z''y''y''yG
''z''y''z''y''x''x''xG
=−−=
=−−=
=−−=
∑
∑
∑
ωωω
ωωω
ωωω
&
&
&

ANEXO 1 Bibliografía
- 91/105 -
9.2.1. Comportamiento de un sólido que gira inicialmente respecto del eje de inercia máxima.
velocidad angular inicial en la dirección
de 1''x
Se supone que los momentos principales de inercia cumplen con la siguiente propiedad 111 ''z''y''x III >>
y, para simplificar, el sólido inicialmente solo tiene velocidad angular en componente 1''x , de modo que
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
00
1''x
1''z1''y1''x
ωωr
perturbación Si en estas condiciones se aplica una pequeña perturbación que varía la velocidad angular una magnitud infinitesimal ( 1''z1''y1''xdω
r, Fig. 9.21) pero que no varía el momento respecto del c.d.m. ( 0MG
rr=∑ ), las
componentes de la velocidad angular del sólido (1''z1''y1''xGω
r) son
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=+
1
1
1
1
1
11
111111
''z
''y
''x
''z
''y
''x''x
''z''y''x''z''y''x
dd
ddd
00d
ωω
ω
ωωωω
ωωrr
por lo que las ecuación de Euler pasan a ser
( ) ( )
( ) ( )
( ) ( ) 0dIIddtdIM
0dIIddtdIM
0ddIIdtdIM
1111111
1111111
1111111
''y''x''y''x''z''z''zG
''x''z''x''z''y''y''yG
''z''y''z''y''x''x''xG
=−−=
=−−=
=−−=
∑
∑
∑
ωωω
ωωω
ωωω
1x ''ω
1yd ''ω
1zd ''ω
x=x1=x’1=x’’1
y=y1
z=z1
y’1= y’’1
z’1=z’’1
ωr
ωr
x=x1=x’1=x’’1
y=y1
y’1= y’’1
z=z1
z’1= z’’1
Fig. 9.21 – Sólido que gira inicialmente respecto del eje principal de inercia x’1 y perturbación de
la velocidad.
o bien
( ) ( )
( ) ( )
( ) ( )111111
111111
111111
''y''x''y''x''z''z
''x''z''x''z''y''y
''z''y''z''y''x''x
dIIddtdI
dIIddtdI
ddIIdtdI
ωωω
ωωω
ωωω
−=
−=
−=
eliminación de infinitésimos de segundo orden
y puesto que se desprecian los infinitésimos de segundo orden
0dd 1''z1''y ≈ωω

ANEXO 1 Bibliografía
- 92/105 -
las expresiones pasan a ser
( )
( ) ( )
( ) ( )111111
111111
11
''y''x''y''x''z''z
''x''z''x''z''y''y
''x''x
dIIddtdI
dIIddtdI
0dtdI
ωωω
ωωω
ω
−=
−=
=
ecuaciones diferenciales acopladas
o anteponiendo la derivada respecto del tiempo (utilizando la notación del punto) a la diferencial
( )( )
111111
111111
11
''y''x''y''x''z''z
''x''z''x''z''y''y
''x''x
dIIdI
dIIdI
0I
ωωω
ωωω
ω
−=
−=
=
&
&
&
La primera ecuación implica que la componente 1''xω es constante
cte00I1111 ''x''x''x''x =⇒=⇒= ωωω &&
luego, despejando las otras variaciones de la velocidad angular respecto del tiempo se obtiene
( ) ( )11
1
11111
1
111 ''y''x
''z
''y''x''z''z''x
''y
''x''z''y d
III
ddI
IId ωωωωωω
⎥⎥⎦
⎤
⎢⎢⎣
⎡ −=
⎥⎥⎦
⎤
⎢⎢⎣
⎡ −= &&
constituyendo un sistema de ecuaciones diferenciales acopladas (las distintas componentes de la velocidad angular están intercaladas en las ecuaciones diferenciales) en el que los términos entre corchetes son constantes.
Concepto clave El comportamiento de un sólido que inicialmente gira respecto de un eje de momento de inercia máximo x’’1 tras una perturbación da lugar a un sistema de ecuaciones diferenciales acopladas.
proceso de desacoplado Para solucionar el sistema derivamos la segunda expresión respecto del tiempo y despejamos 1''ydω&
( )( )
⎥⎥⎦
⎤
⎢⎢⎣
⎡ −=⇒
⎥⎥⎦
⎤
⎢⎢⎣
⎡ −=
11
11
1111
1
111
''x''z
''y''x
''z''y''y''x
''z
''y''x''z
III
ddd
III
d
ω
ωωωωω
&&&&&&
sustituyendo en la primera
( )
( ) ( )( )
111
11
11
11
1
11
11
11
111
111
''z''x''y
''x''z
''x''z
''y''x
''z
''x''z
''y''x
''z''y
''z''x''y
''x''z''y
dI
II
III
d
III
dd
dI
IId
ωω
ω
ω
ω
ωω
ωωω
⎥⎥⎦
⎤
⎢⎢⎣
⎡ −=
⎥⎥⎦
⎤
⎢⎢⎣
⎡ −⇒
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎥⎥⎦
⎤
⎢⎢⎣
⎡ −=
⎥⎥⎦
⎤
⎢⎢⎣
⎡ −=
&&&&
&
&
Expresión a partir de la cual obtenemos,
( ) ( )11
1
111
1
111 ''z''x
''y
''z''x''x
''z
''y''x''z d
III
III
d ωωωω⎥⎥⎦
⎤
⎢⎢⎣
⎡ −
⎥⎥⎦
⎤
⎢⎢⎣
⎡ −−=&&
en la que se ha cambiado de signo uno de los términos y se ha sacado factor común un signo negativo para evitar la aparición de un radical negativo, como se comprobará a continuación.

ANEXO 1 Bibliografía
- 93/105 -
Si se denomina 2xA al término constante,
( ) ( )⎥⎥⎦
⎤
⎢⎢⎣
⎡ −
⎥⎥⎦
⎤
⎢⎢⎣
⎡ −=
11
111
1
11''x
''y
''z''x''x
''z
''y''x2x I
III
IIA ωω con 0A2
x >
y se sustituye en la ecuación anterior, se obtiene la ecuación diferencial del movimiento desacoplada en componentes 1''z
0dAddAd 1''z2x1''z1''z
2x1''z =+⇒−= ωωωω &&&&
Mediante un proceso análogo se obtendría la ecuación diferencial desacoplada para el primer término
( )11
1
111 ''z''x
''y
''x''z''y d
III
d ωωω⎥⎥⎦
⎤
⎢⎢⎣
⎡ −=&
ecuaciones diferenciales desacopladas
en componentes 1''y , con lo que el sistema de ecuaciones diferenciales desacopladas es
⎪⎩
⎪⎨⎧
=+
=+
0dAd
0dAd
11
11
''z2x''z
''y2x''y
ωω
ωω
&&
&&
cuya solución corresponde a movimientos armónicos simples de la misma pulsación (Ax) y direcciones perpendiculares.
La primera ecuación diferencial tiene como solución,
( ) xxxy''''y2x''y αtA senCdω0dAd
111+=⇒=+ ωω&&
donde xC y xα son constantes que se obtienen de las condiciones iniciales.
Sustituyendo ahora la solución 1y''dω en la expresión de 1''zdω& se obtiene
( )
( )
( ) ( ) ( )xxxxxxx''''z
''y''xz''
xxxy''
''y''x''z
''y''x''z αtA senDαtA senCω
III
ωd
αtA senCdω
dI
IId
11
111
1
111
111 +=+
⎥⎥⎦
⎤
⎢⎢⎣
⎡ −=⇒
⎪⎪⎭
⎪⎪⎬
⎫
+=
⎥⎥⎦
⎤
⎢⎢⎣
⎡ −=
&&
ωωω
con Dx constante de magnitud
( )⎥⎥⎦
⎤
⎢⎢⎣
⎡ −=
11
11''x
''z
''y''xxx I
IICD ω
luego la solución en este caso es
( ) ( )xxx
xz''xxxz'' αtAcos
ADdωαtA senDωd
11+−=⇒+=&
solución por lo que la solución del sistema de las ecuaciones diferenciales es
( )
( )
αtAcos AD
dω
αtA senCdω
0dω
xxx
xz''
xxxy''
x''
1
1
1
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
+−=
+=
=

ANEXO 1 Bibliografía
- 94/105 -
oscilación elíptica y la perturbación introducida al forzar pequeñas variaciones de la velocidad angular ( 1''z1''y1''xdωr
) en un
sólido que gira respecto al eje asociado al momento principal de inercia máximo 1''x no se incrementa con el tiempo, sino que se produce una oscilación elíptica con velocidades angulares de componentes
( ) ( )xxx
x''zxxx''y''x αtAcos
ADdαtA senCdcte
111+−=+== ωωω
con lo que la rotación respecto del eje principal 1''x permanece estable (Fig. 9.22).
xA
111111 zyxzyx d '''''''''''' ωωrr
+
x=x1=x’1=x’’1
y=y1
z=z1
y’1=y’’1
z’1=z’’1
Fig. 9.22 – Movimiento estable tras la perturbación de un giro inicial respecto del eje 1''x .
Un valor grande de la pulsación (Αx) representa una alta frecuencia de oscilación (f) y un periodo (T) pequeño, lo que garantiza la estabilidad del movimiento.
T1f
Aπ2Tx
=⇒=
Concepto clave El comportamiento de un sólido que inicialmente gira respecto del eje de momento de inercia máximo x’’1 tras una perturbación da lugar a una oscilación elíptica estable.
9.2.2. Comportamiento de un sólido que gira inicialmente respecto del eje de inercia mínima.
velocidad angular tras la perturbación
Si se consideran rotaciones iniciales del sólido alrededor del eje de inercia mínimo (z’’1) la velocidad angular del sólido tras la perturbación es
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=+
1
1
1
1
1
1
1
111111
''z
''y
''x
''z
''y
''x
''z
''z''y''x''z''y''x dd
ddd
00
dωωω
ωωω
ωωωrr
ecuaciones de equilibrio dinámico
y las ecuaciones de Euler
( ) ( )
( ) ( )
( ) ( )111111
111111
111111
''y''x''y''x''z''z
''x''z''x''z''y''y
''z''y''z''y''x''x
ddIIdtdI
dIIddtdI
dIIddtdI
ωωω
ωωω
ωωω
−=
−=
−=
en la que despreciando infinitésimos y derivando antes de diferenciar se obtiene

ANEXO 1 Bibliografía
- 95/105 -
( )( )
0I
dIIdI
dIIdI
11
111111
111111
''z''z
''x''z''x''z''y''y
''z''y''z''y''x''x
=
−=
−=
ω
ωωω
ωωω
&
&
&
parámetro siguiendo el mismo procedimiento con el que se ha obtenido el coeficiente 2xA de la perturbación respecto
del eje x
( ) ( )⎥⎥⎦
⎤
⎢⎢⎣
⎡ −
⎥⎥⎦
⎤
⎢⎢⎣
⎡ −=
11
111
1
11''x
''y
''z''x''x
''z
''y''x2x I
III
IIA ωω con 0A2
x >
se obtendrían el coeficiente 2zA , de expresión
( ) ( )⎥⎥⎦
⎤
⎢⎢⎣
⎡ −
⎥⎥⎦
⎤
⎢⎢⎣
⎡ −=
11
11
11
11''z
''y
''z''x''z
''x
''z''y2z I
III
IIA ωω
y recordando la propiedad
111 ''z''y''x III >>
se tiene que
0A2z >
ecuaciones diferenciales obteniéndose las ecuaciones diferenciales desacopladas
⎪⎩
⎪⎨⎧
=+
=+
0dAd
0dAd
1''y2z1''y
1''x2z1''x
ωω
ωω
&&
&&
solución semejantes a las obtenidas en el estudio del giro respecto al eje x’’1, por lo que la solución vuelve a ser una combinación de movimientos armónicos simples de direcciones perpendiculares
( ) ( ) cteωαtA senAD
dωαtA senCdω111 z''zz
z
zy''zzzx'' =+−=+=
por lo que una perturbación que fuerza pequeñas variaciones de la velocidad angular respecto del giro inicial en la dirección de la componente principal de inercia mínima 1''z , también produce una oscilación elíptica respecto a ese eje, y por lo tanto el movimiento es estable (Fig. 9.23).
Concepto clave El comportamiento de un sólido que inicialmente gira respecto del eje de momento de inercia mínimo z’’1 tras una perturbación da lugar a una oscilación elíptica estable.
zA
111111 zyxzyx d '''''''''''' ωωrr
+
x=x1=x’1=x’’1
y=y1
z=z1
y’1=y’’1
z’1=z’’1
Fig. 9.23 – Movimiento estable tras la perturbación de un giro inicial respecto del eje 1''z .

ANEXO 1 Bibliografía
- 96/105 -
9.2.3. Comportamiento de un sólido que gira inicialmente respecto del eje de inercia intermedia.
Sin embargo, si el giro inicial es respecto del eje de principal de inercia intermedio 1''y , el comportamiento tras la perturbación es distinto al de los otros ejes.
velocidad angular tras la perturbación
La velocidad angular del sólido tras la perturbación sería
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=+
1
1
1
1
1
1
1111111
''z
''y
''x
''z
''y
''x
''y''z''y''x''z''y''x
d
d
ddd
0
0d
ωωω
ωωω
ωωωrr
ecuaciones de equilibrio dinámico
y las ecuaciones de Euler
( ) ( )
( ) ( )
( ) ( )111111
111111
111111
''y''x''y''x''z''z
''x''z''x''z''y''y
''z''y''z''y''x''x
dIIddtdI
ddIIdtdI
dIIddtdI
ωωω
ωωω
ωωω
−=
−=
−=
en la que despreciando infinitésimos y derivando antes de diferenciar
( )
( )111111
11
111111
''y''x''y''x''z''z
''y''y
''z''y''z''y''x''x
dIIdI
0I
dIIdI
ωωω
ω
ωωω
−=
=
−=
&
&
&
parámetro siguiendo el mismo procedimiento con el que se ha obtenido el coeficiente 2xA de la perturbación respecto
del eje 1''x
( ) ( )⎥⎥⎦
⎤
⎢⎢⎣
⎡ −
⎥⎥⎦
⎤
⎢⎢⎣
⎡ −=
11
111
1
11''x
''y
''z''x''x
''z
''y''x2x I
III
IIA ωω con 0A2
x >
se obtendría el coeficiente 2yA , de expresión
( ) ( )⎥⎥⎦
⎤
⎢⎢⎣
⎡ −
⎥⎥⎦
⎤
⎢⎢⎣
⎡ −=
11
11
11
11''y
''x
''y''z''y
''z
''y''x2y I
III
IIA ωω
en la que recordando la propiedad
111 ''z''y''x III >>
se tiene que
0A2y <
ecuaciones diferenciales obteniéndose las ecuaciones diferenciales
⎪⎩
⎪⎨⎧
=−
=−
0dAd
0dAd
11
11
''z2y''z
''x2y''x
ωω
ωω
&&
&&
solución cuya solución es una función exponencial

ANEXO 1 Bibliografía
- 97/105 -
tAyz''y''
tAyx''
y
11
y
1 eDdωcteω eCdω ===
con lo que la perturbación aumenta con el tiempo de forma ilimitada, y el movimiento se vuelve inestable (Fig. 9.24).
111111 zyxzyx d '''''''''''' ωωrr
+
x=x1=x’1=x’’1
y=y1
z=z1
y’1=y’’1
z’1=z’’1
Fig. 9.24 – Movimiento inestable tras la perturbación de un giro inicial respecto del eje 1''y .
Concepto clave El comportamiento de un sólido que inicialmente gira respecto del eje de momento de inercia intermedio y’’1 tras una perturbación da lugar a un movimiento inestable.
La conclusión es que perturbaciones respecto de la rotación inicial alrededor de ejes principales con momentos de inercia máximo y mínimo ( 11 ''z''x ) producen movimientos estables, mientras que perturbaciones respecto de la rotación inicial alrededor del eje principal con momento de inercia intermedio ( 1''y ) genera movimientos inestables.
9.2.4. Sólido con simetría axil.
características geométricas
En el caso en que dos de los momentos principales de inercia sean iguales (por ejemplo el máximo y el intermedio
11 ''y''x II = ) el sólido tiene simetría másica respecto del eje perpendicular 1''z .
giro inicial respecto al eje 1''x
En este caso la diferencia entre estos momento de inercia se anula 0II11 ''y''x =− , por lo que teniendo en
cuenta las ecuaciones diferenciales correspondientes a un sólido que gira inicialmente con velocidad en la dirección del eje x’’1
( )( )
111111
111111
11
''y''x''y''x''z''z
''x''z''x''z''y''y
''x''x
dIIdI
dIIdI
0I
ωωω
ωωω
ω
−=
−=
=
&
&
&
la tercera ecuación también se anula
( )0dI
dIIdI
0I
11
111111
11
''z''z
''x''z''x''z''y''y
''x''x
=
−=
=
ω
ωωω
ω
&
&
&
repuesta en la dirección del eje 1''z
lo que implica que la variación de la componente 1''z de la velocidad angular (al igual que lo es la componente 1''x de la velocidad inicial) es constante (Fig. 9.25)
cted0d0dI1111 ''z''z''z''z =⇒=⇒= ωωω &&

ANEXO 1 Bibliografía
- 98/105 -
111 ''z''y''xω
r
x=x1=x’1=x’’1
y=y1
z=z1
y’1=y’’1
z’1=z’’1
Fig. 9.25 – Movimiento estable tras la perturbación en un sólido con simetría axil respecto del eje 1''z y
velocidad inicial en el eje 1''x .
repuesta en la dirección del eje 1''y
En esta situación, la velocidad en la dirección del eje 1''y tras la perturbación cuando el sólido gira inicialmente respecto al eje 1''x , a partir de la segunda ecuación diferencial es
( )
⎩⎨⎧ +
=⇒=⇒
⎪⎪⎭
⎪⎪⎬
⎫
=
=⎥⎥⎦
⎤
⎢⎢⎣
⎡ −=
0BtA
dcted
cted
ctedI
IId
11
1
111
11
1''y''y
''z
''z''x''y
''x''z''y ωω
ω
ωωω&
&
el principio de mínima energía indica que se considere la solución nula, con lo que la perturbación del sólido en la dirección del eje 1''y es nula.
0d0dcte111 ''z''y''x === ωωω
La conclusión es que la respuesta de un sólido con simetría axil en el eje 1''z que gira respecto del eje 1''x a una perturbación es nula.
Concepto clave La respuesta de un sólido con simetría axil en el eje 1''z tras una perturbación es nula.
giro inicial respecto al eje 1''y
Si el giro inicial fuese respecto del eje 1''y el resultado sería el mismo, una variación de la velocidad nula en los ejes 1''y y 1''z .
( )
( ) 0dIIdI
0I
dIIdI
111111
11
111111
''y''x''y''x''z''z
''y''y
''z''y''z''y''x''x
=−=
=
−=
ωωω
ω
ωωω
&
&
&
0dcte0d111 ''z''y''x === ωωω
giro inicial respecto al eje 1''z
Si el giro inicial fuese respecto del eje 1''z , las ecuaciones diferenciales correspondientes son
( )( )
0I
dIIdI
dIIdI
11
111111
111111
''z''z
''x''z''x''z''y''y
''z''y''z''y''x''x
=
−=
−=
ω
ωωω
ωωω
&
&
&
que no se ven afectadas por la igualdad de los momentos de inercia respecto de los ejes 1''x e 1''y , por lo que la solución vuelve a ser una oscilación elíptica estable.

ANEXO 1 Bibliografía
- 99/105 -
( ) ( ) cteωαtA senAD
dωαtA senCdω111 z''zz
z
zy''zzzx'' =+−=+=
9.2.5. Sólido con simetría polar.
En el caso en que los tres momentos de inercia son iguales, los coeficiente 11 ''y''x II − y
11 ''x''z II − se anulan.
giro inicial respecto del eje 1''x
Si se considera el giro inicial respecto del eje 1''x las ecuaciones diferenciales son
( )( )
111111
111111
11
''y''x''y''x''z''z
''x''z''x''z''y''y
''x''x
dIIdI
dIIdI
0I
ωωω
ωωω
ω
−=
−=
=
&
&
&
por lo que sustituyendo la diferencia de momentos de inercia se obtiene
0dI
0dI
0I
11
11
11
''z''z
''y''y
''x''x
=
=
=
ω
ω
ω
&
&
&
y tanto 1y''dω como 1z''dω permanecen constantes en el tiempo
0d0d0dI
0d0d0dI
1111
1111
''z''z''z''z
''y''y''y''y
=⇒=⇒=
=⇒=⇒=
ωωω
ωωω&&
&&
0d0dcte111 ''z''y''x === ωωω
y la perturbación producirá rotaciones estables (Fig. 9.26).
111 ''z''y''xω
r
x=x1=x’1=x’’1
y=y1
z=z1
y’1=y’’1
z’1=z’’1
Fig. 9.26 – Movimiento estable tras la perturbación en un sólido con simetría polar y velocidad inicial en el
eje 1''x .
giro inicial respecto de los ejes 1''y y 1''z
Si se considera los giros iniciales respecto de los ejes 1''y y 1''z los resultados serían los siguientes
0dcte0d111 ''z''y''x === ωωω
cte0d0d111 ''z''y''x === ωωω
y las perturbaciones producirán rotaciones estables.

ANEXO 1 Bibliografía
- 100/105 -
Conceptos fundamentales: Cantidad de movimiento lineal de un sólido rígido.
mvL Grr
= Equilibrio dinámico de fuerzas y momentos.
Gam Frr
=∑ OO HM&rr
= Sumatorio de momentos respecto del c.d.m.
GGG 'HHM&r&rr
== Relación entre el momento angular y la velocidad angular de un sólido rígido.
{ } [ ] { }ωGG TH = Momento angular respecto de un punto distinto del c.d.m.
GQGGQ vmrHHrrrr
×+= − Momento angular de un sólido rígido restringido a girar alrededor de un punto fijo.
{ } [ ] { }ωQQ TH = Aplicación de los principios del impulso lineal y angular al movimiento de un sólido rígido.
12
t
tii LLdtF
dtLdF
2
1
rrrr
r−=⇒= ∫ ∑∑
12 GG
2
1G
GG HHdtM
dtHd
Mrrr
rr
−=⇒= ∫
Energía cinética de un sólido rígido en tres dimensiones.
{ } [ ] { } rc
GcG
t2Gc EET
21vm
21E +=+= ωω
Relación entre energía cinética y cantidad de movimiento lineal.
'kdvdE
'jdvdE
'idvdE
LGGG 'z
c
'y
c
'x
crrrr
++=
Relación entre energía cinética y momento angular.
'kddE
'jddE
'iddE
H'z
c
'y
c
'x
cG
rrrr
ωωω++=
Energía cinética de un sólido rígido con un punto fijo.
{ } [ ] { }ωω Qt
c T21E =
Trabajo.
12i
cc21FGGi EETdMrdFdT −=⇒⋅+⋅= −θ
rrrr r
Movimiento de un sólido rígido en tres dimensiones.
[ ] { }
( )[ ] { }
4434421
rr
44 344 21
&r&rr
r&
ωω
Ω
G
111111
G
111 T
'z'y'GxG'z'y'x
eT
'z'y'GxGGG HHHM ×+⎟⎟
⎠
⎞⎜⎜⎝
⎛==∑
Ecuaciones de Euler generalizadas del movimiento.
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−−
+
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
112221
331113
223332
33
22
11
G3
G2
G1
'e'e'e'e'e'e
'e'e'e'e'e'e
'e'e'e'e'e'e
'e'e
'e'e
'e'e
'e
'e
'e
IIIIII
I
I
I
MMM
ωΩωΩωΩωΩωΩωΩ
ω
ω
ω
&
&
&
Ecuaciones de Euler del movimiento.
( )( )( ) ⎪
⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−−
+
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
1212
3131
3223
33
22
11
G3
G2
G1
'e'e'e'e
'e'e'e'e
'e'e'e'e
'e'e
'e'e
'e'e
'e
'e
'e
IIIIII
I
I
I
MMM
ωωωωωω
ω
ω
ω
&
&
&

ANEXO 1 Bibliografía
- 101/105 -
Movimiento de un sólido con un punto fijo.
( )( )( ) ⎪
⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−−−
+
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
1212
3131
3223
33
22
11
Q3
Q2
Q1
'e'e'e'e
'e'e'e'e
'e'e'e'e
'e'e
'e'e
'e'e
'e
'e
'e
IIIIII
I
I
I
MMM
ωωωωωω
ω
ω
ω
&
&
&
Rotación de un sólido rígido alrededor de un eje fijo.
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=∑
1
1
1
'Gz
'Gy
'Gx
a
a
a
mFr
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+−
+−
=∑
1Q1
1Q111Q11
1Q111Q11
'z'z
2'z'z'x'z'z'y
2'z'z'y'z'z'x
Q
I
II
II
M
ω
ωω
ωω
&
&
&
r
Estudio del equilibrio de ejes o árboles rotatorios.
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
−=
1Q1
1Q11
1Q11
'z'z
'z'z'y
2'z'z'y
Q
I
I
I
H
ω
ω
ω
&
&&r
Estudio del equilibrio de ejes o árboles rotatorios con velocidad constante. 2'z'z'y'x 1Q11Q1
IH ω=&
Movimiento de un giroscopio en base arbitraria con movimiento de precesión y nutación. ( ) ( )( ) ( )
( ) ( )( ) ( )[ ] ( ) ( )[ ]
( ) ( )[ ] ( ) ( )[ ]( ) ( )[ ] ( ) ( )[ ] ⎪
⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+−−−+−+−
++−−−+−−
+−+−−++−−
+
+
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+−++−−
+−−++−
+−−+−
=∑
θψϕθψθψθθϕθψθψθ
θϕθψθψθψϕθψθψθ
θψϕθψθψθθψϕθψθψθ
ϕθθψθψθθψθψθ
ϕθθψθψθθψθψθ
ϕθθψθψθθψθψθ
sencosIsenIIcosIsenII
cosIsenIIcoscosIsenII
coscosIsenIIsencosIsenII
sencosIcossenII
sencosIcossenII
sencosIcossenII
M
1111111111
1111111111
1111111111
11111
11111
11111
111
'z'x'y'x'x'z'y'y'y'x
'z'z'y'z'x'z'x'y'x'x
'z'y'y'y'x'z'z'y'z'x
'z'z'y'z'x
'z'y'y'y'x
'z'x'y'x'x
'z'y'xG
&&&&&&&&&&
&&&&&&&&&&
&&&&&&&&&&
&&&&&&&&&&&&
&&&&&&&&&&&&
&&&&&&&&&&&&r
Movimiento de un giroscopio en base principal de inercia con movimiento de precesión y nutación.
( )( )
( )[ ] ( )[ ][ ] ( )[ ]
( )[ ] [ ] ⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
−
+−
−+
+
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+−
+=∑θψθθθψ
θϕθψψθ
θψθψθψϕθψ
ϕθθψθψ
θθψθψ
θ
senIsenI
cosIcosI
cossenIsencosI
sencosI
cossenI
I
M
12
31
23
3
2
1
321
ee
ee
ee
e
e
e
eeeG
&&&&
&&&&&
&&&&&
&&&&&&
&&&&
&&r
Precesión estacionaria en un giroscopio en base principal de inercia.
⎪⎩
⎪⎨
⎧
===
cte cte ψ cteθ
ria estacionaprecesión ϕ&&
( )[ ] ( )[ ]⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧ −++
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
00
cossenIsencosI
000
H23 'e'e
G
θψθψθψϕθψ &&&&&&r
Precesión estacionaria en un giroscopio con nutación a 90º.
311 'e'eG'eG IHM ϕψ &&& ==∑
Precesión lenta y rápida.
( )( )
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡ −+±−
−=
∑22
'e
'e'e'eG
'e'e
'e
3
231
23
3
Isen
cosIIM411
cosII2I
ϕθ
θ
θ
ϕψ
&
&&
Condición de velocidad mínima de rotación propia. ( )
2'e
'e'e'eG2min
3
231
Itg
IIM4
θϕ
−−>
∑&
Relación entre velocidad angular, momento angular y geometría del sólido con precesión estacionaria
3
2
'e
'e
II
tgtg γα =

ANEXO 1 Bibliografía
- 102/105 -
Sólido alargado (32 'e'e II > ).
γαγαγα >⇒>⇒= tgtgII
tgtg3
2
'e
'e
Sólido achatado (32 'e'e II < ).
γαγαγα <⇒<⇒= tgtgII
tgtg3
2
'e
'e
Plano invariante
0E2'eI'eI'eI rc3'e'e2'e'e1'e'e 332211
=−++ ωωω
Elipsóide de Poisont
( ) 01E2
I
E2
I
E2
IIIIE2 r
c
2'e'e
rc
2'e'e
rc
2'e'e
'e2'e'e
2'e'e
2'e
rc
332211
332211=−++⇒++=
ωωωωωω
Elipsoide de inercia. 1'eI'eI'eI 2
3'e22'e
21'e 321
=++ Axoide móvil.
( ) ( ) ( ) 0'eIGI'eIGI'eIGI 23'e'e
22'e'e
21'e'e 332211
=−+−+− Comportamiento de un sólido que gira inicialmente con velocidad angular en la dirección de inercia máxima
1''x con sistema de referencia solidario al sólido. Velocidad angular.
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=+
1
1
1
1
1
11
111111
''z
''y
''x
''z
''y
''x''x
''z''y''x''z''y''x
dd
ddd
00d
ωω
ω
ωωωω
ωωrr
Comportamiento de un sólido que gira inicialmente con velocidad angular en la dirección de inercia máxima1''x . Ecuaciones de equilibrio dinámico.
( )
( ) ( )
( ) ( )111111
111111
11
''y''x''y''x''z''z
''x''z''x''z''y''y
''x''x
dIIddtdI
dIIddtdI
0dtdI
ωωω
ωωω
ω
−=
−=
=
Comportamiento de un sólido que gira inicialmente con velocidad angular en la dirección de inercia máxima1''x . Solución de las ecuaciones diferenciales.
( ) ( )xxx
x''zxxx''y''x αtAcos
ADdαtA senCdcte
111+−=+== ωωω
Comportamiento de un sólido que gira inicialmente con velocidad angular en la dirección de inercia mínima1''z . Velocidad angular.
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=+
1
1
1
1
1
1
1
111111
''z
''y
''x
''z
''y
''x
''z
''z''y''x''z''y''x dd
ddd
00
dωωω
ωωω
ωωωrr
Comportamiento de un sólido que gira inicialmente con velocidad angular en la dirección de inercia mínima1''z . Ecuaciones de equilibrio dinámico.
( )( )
0I
dIIdI
dIIdI
11
111111
111111
''z''z
''x''z''x''z''y''y
''z''y''z''y''x''x
=
−=
−=
ω
ωωω
ωωω
&
&
&
Comportamiento de un sólido que gira inicialmente con velocidad angular en la dirección de inercia mínima1''z . Solución de las ecuaciones diferenciales. Sistema estable.

ANEXO 1 Bibliografía
- 103/105 -
( ) ( ) cteωαtA senAD
dωαtA senCdω111 z''zz
z
zy''zzzx'' =+−=+=
Comportamiento de un sólido que gira inicialmente con velocidad angular en la dirección de inercia intermedia1''y . Velocidad angular.
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=+
1
1
1
1
1
1
1111111
''z
''y
''x
''z
''y
''x
''y''z''y''x''z''y''x
d
d
ddd
0
0d
ωωω
ωωω
ωωωrr
Comportamiento de un sólido que gira inicialmente con velocidad angular en la dirección de inercia intermedia1''y . Ecuaciones de equilibrio dinámico.
( )
( )111111
11
111111
''y''x''y''x''z''z
''y''y
''z''y''z''y''x''x
dIIdI
0I
dIIdI
ωωω
ω
ωωω
−=
=
−=
&
&
&
Comportamiento de un sólido que gira inicialmente con velocidad angular en la dirección de inercia intermedia1''y . Solución de las ecuaciones diferenciales. Sistema estable.
tAyz''y''
tAyx''
y
11
y
1 eDdωcteω eCdω ===
Comportamiento de un sólido que gira inicialmente con velocidad angular en la dirección de inercia máxima1''x con simetría axial (
11 ''y''x II = ). Ecuaciones de equilibrio dinámico.
( )0dI
dIIdI
0I
11
111111
11
''z''z
''x''z''x''z''y''y
''x''x
=
−=
=
ω
ωωω
ω
&
&
&
Comportamiento de un sólido que gira inicialmente con velocidad angular en la dirección de inercia máxima1''x con simetría axial (
11 ''y''x II = ). Solución de las ecuaciones diferenciales. Sistema estable.
0d0dcte111 ''z''y''x === ωωω
Comportamiento de un sólido que gira inicialmente con velocidad angular en la dirección de inercia intermedia1''y con simetría axial (
11 ''y''x II = ). Ecuaciones de equilibrio dinámico.
( )
0dI
0I
dIIdI
11
11
111111
''z''z
''y''y
''z''y''z''y''x''x
=
=
−=
ω
ω
ωωω
&
&
&
Comportamiento de un sólido que gira inicialmente con velocidad angular en la dirección de inercia intermedia1''y con simetría axial (
11 ''y''x II = ). Solución de las ecuaciones diferenciales. Sistema estable.
0dcte0d111 ''z''y''x === ωωω
Comportamiento de un sólido que gira inicialmente con velocidad angular en la dirección de inercia mínima 1''z con simetría axial (
11 ''y''x II = ). Ecuaciones de equilibrio dinámico.
( )( )
0I
dIIdI
dIIdI
11
111111
111111
''z''z
''x''z''x''z''y''y
''z''y''z''y''x''x
=
−=
−=
ω
ωωω
ωωω
&
&
&
Comportamiento de un sólido que gira inicialmente con velocidad angular en la dirección de inercia mínima1''z con simetría axial (
11 ''y''x II = ). Solución de las ecuaciones diferenciales. Sistema estable.
( ) ( ) cteωαtA senAD
dωαtA senCdω111 z''zz
z
zy''zzzx'' =+−=+=
Comportamiento de un sólido que gira inicialmente con velocidad angular en la dirección de inercia máxima 1''x con simetría polar. Ecuaciones de equilibrio dinámico. Solución de las ecuaciones diferenciales. Sistema
estable.

ANEXO 1 Bibliografía
- 104/105 -
0dI
0dI
0I
11
11
11
''z''z
''y''y
''x''x
=
=
=
ω
ω
ω
&
&
&
0d0dcte111 ''z''y''x === ωωω
Comportamiento de un sólido que gira inicialmente con velocidad angular en la dirección de inercia máxima 1''y con simetría polar. Ecuaciones de equilibrio dinámico. Solución de las ecuaciones diferenciales. Sistema
estable.
0dI
0I
0dI
11
11
11
''z''z
''y''y
''x''x
=
=
=
ω
ω
ω
&
&
&
0dcte0d111 ''z''y''x === ωωω
Comportamiento de un sólido que gira inicialmente con velocidad angular en la dirección de inercia máxima 1''z con simetría polar. Ecuaciones de equilibrio dinámico. Solución de las ecuaciones diferenciales. Sistema
estable.
0I
0dI
0dI
11
11
11
''z''z
''y''y
''x''x
=
=
=
ω
ω
ω
&
&
&
cte0d0d111 ''z''y''x === ωωω

ANEXO 1 Bibliografía
- 105/105 -
ANEXO 1. Bibliografía
Autor: Beer y Johnston
Título: Mecánica Vectorial para Ingenieros. Dinámica
Edición: 08
Fecha Publ.: 2007
ISBN: 97-010-6102-0
Autor: Meriam y Craige
Título: Dinámica
Edición: 3
Editor: Mc Graw Hill
Fecha Publ.: 2000
ISBN: 84-291-4259-2
Autor: Riley y Sturges
Título: Ingeniería Mecánica: Dinámica
Edición: 1
Editor: Editorial Reverté S.A.
Fecha Publ.: 2006
ISBN: 978429142556
Autor: Prieto Alberca
Título: Curso de Mecánica Racional. Dinámica (Volumen 2)
Edición: 1
Editor: Aula Documental de Investigación
Fecha Publ.: 1994
ISBN: 9788460490715