Tratamiento numérico del Péndulo Doble
28
-
Upload
miguel-angel-herrera -
Category
Documents
-
view
82 -
download
5
description
En este documento se realiza un tratamiento numérico al comportamiento de un péndulo doble. Mediante la herramienta MATLAB, planteamos el sistema de ecuaciones diferenciales general, para despues realizar dos simplificaciones, y comparar los resultados obtenidos.
Transcript of Tratamiento numérico del Péndulo Doble

Universidad de CórdobaFacultad de Ciencias - Grado de Física
Trabajo optativo 50: movimiento deun péndulo doble.
Métodos Numéricos y Simulación
2o Curso 2014/2015
Realizado por:
Miguel Ángel Jiménez Herrera

Trabajo 50: Péndulo Doble
Índice
Índice 1
Índice de �guras 1
1. Introducción. 2
2. Planteamiento del problema. 2
3. Resolución del problema (I). Caso lineal. Método de Runge-Kutta deorden 4 (O(h4)). 53.1. Código del programa implementado en MATLAB. . . . . . . . . . . . . . . 73.2. Resultados obtenidos del método de Runge-Kutta de orden 4. . . . . . . . . 9
4. Resolución del problema (II). Caso no lineal (I). Método de Runge-Kuttade orden 4 (O(h4)). 144.1. Código del programa implementado en MATLAB. . . . . . . . . . . . . . . 144.2. Resultados obtenidos por el método de Runge-Kutta de orden 4. . . . . . . 16
5. Resolución del problema (III). Caso no lineal (II). Fórmulas de Adams-Bashford y de Adams-Moulton de orden 4 (O(h4)). 205.1. Código del programa implementado en MATLAB. . . . . . . . . . . . . . . 205.2. Resultados obtenidos por el método predictor-corrector. . . . . . . . . . . . 23
6. Bibliografía 27
Índice de �guras
1. Esquema péndulo doble. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22. Representación grá�ca de la ecuación de movimiento para θ1. . . . . . . . . 93. Representación grá�ca de la ecuación de movimiento para θ2. . . . . . . . . 104. θ1(t) frente a θ2(t). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115. Plano de fases para θ1(t). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126. Plano de fases para θ2(t). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127. Representación grá�ca de la ecuación de movimiento para θ1. . . . . . . . . 168. Representación grá�ca de la ecuación de movimiento para θ2. . . . . . . . . 179. θ1(t) frente a θ2(t). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1810. Plano de fases para θ1(t). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1911. Plano de fases para θ2(t). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1912. Representación grá�ca de la ecuación de movimiento para θ1. . . . . . . . . 2313. Representación grá�ca de la ecuación de movimiento para θ2. . . . . . . . . 2414. θ1(t) frente a θ2(t). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2515. Plano de fases para θ1(t). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2616. Plano de fases para θ2(t). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Miguel Ángel Jiménez Herrera 1 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
1. Introducción.
El objetivo de este trabajo consiste en plantear, analizar y resolver el problema delpéndulo doble. En primer lugar describiremos qué es y de qué se compone un péndulodoble. A continuación, desarrollaremos de forma analítica el planteamiento matemáticodel péndulo doble, hasta llegar a las ecuaciones que modelan el movimiento del mismo.Distinguiremos dos casos, uno lineal, y su correspondiente no lineal. Cada uno constituyeun problema de valores iniciales para el estudio del péndulo doble. Finalmente, resolveremostales problemas mediante métodos numéricos y presentaremos los datos obtenidos, así comolas grá�cas pertinentes para la comprensión de los resultados.
2. Planteamiento del problema.
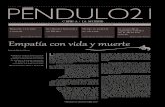
Un péndulo doble es un sistema compuesto por dos péndulos simples coplanarios[5]acoplados de la siguiente forma:
Figura 1: Representación esquemática de un péndulo doble. Elaborado en
LaTeXDraw-3.3.1.
Como vemos en la �gura, está compuesto por:
Dos cuerpos oscilantes (m1 y m2), uno de ellos acoplado al otro. Pueden o no tenerla misma masa.
Un centro de oscilación (primario) del que cuelga uno de los cuerpos. Este cuerpo es,a su vez, un centro de oscilación (secundario) para el segundo cuerpo.
Dos varillas de longitud constante (`1 y `2) y de masa despreciable. Tales varillaspueden tener o no igual longitud.
Las ecuaciones que rigen el movimiento del péndulo doble descrito anteriormente puedenser deducidas mediante formulación lagrangiana, dada su comodidad operacional. Parapoder aplicar esta formulación debemos, en primer lugar, conocer la energía cinética ypotencial de ambas masas. Dado que el sistema tiene dos grados de libertad, emplearemosdos coordenadas generalizadas, θ1 y θ2, para escribir tanto la energía cinética (simbolizadacomo T ), como la energía potencial (simbolizada como V ) en función de las mismas.
Miguel Ángel Jiménez Herrera 2 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
En primer lugar debemos tomar coordenadas (x, y) en el sistema y poner éstas enfunción de (θ1, θ2). Así, mediante trigonometría, obtenemos las expresiones de x e y paracada cuerpo[5]:
x1 es el desplazamiento en el eje X de la masa m1:
x1 = `1senθ1 ⇒ x21 = `21θ21cos
2θ1. (2.1)
y1 es el desplazamiento en el eje Y , medido desde la posición de equilibrio de la masam1. Dado que suponemos que las masas son puntuales, no poseen radio. El origende coordenadas constituye la posición de equilibrio del sistema. De esta forma, sobreel eje Y a una altura `1 + `2, se encontraría el centro de oscilación primario. Porconsiguiente, el punto de equilibrio de la masa m1 estaría a una atura `2 del origende coordenadas que, como hemos indicado, corresponde también con el centro deoscilación secundario:
y1 = `1(1− cosθ1)⇒ y21 = `21θ21sen
2θ1. (2.2)
Si calculamos la expresión de la energía cinética para la primera masa, obtendríamos lasiguiente expresión. Hemos empleado identidades triginométricas para simpli�car la expre-sión:
T1 =1
2m1(x
21 + y21) =
1
2m1`
21θ
21. (2.3)
Repitiendo el proceso anterior para la segunda masa:
x2 es el desplazamiento en el eje X de la masa m2. Este se compone del desplaza-miento intrínseco de m2, x′2, más el desplazamiento de su origen, que coincide conx1:
x2 = x′2 + x1 = `1senθ1 + `2senθ2 ⇒⇒ x22 = `21θ1cos
2θ1 + `22θ2cos2θ2 + 2`1`2θ1θ2cosθ1cosθ2. (2.4)
y2 es el desplazamiento en el eje Y , medido desde la posición de equilibrio de la masam2. El punto de equilibrio de la masa m2 corresponde con el origen de coordenadassegún la discusión llevada a cabo para la masa m1. De la misma manera, se des-compone en el desplazamiento intrínseco de m2 más el desplazamiento de su origen(y′2, y1 respectivamente):
y2 = y′2 + y1 = `1(1− cosθ1) + `2(1− cosθ2)⇒⇒ y22 = `21θ
21sen
2θ1 + `22θ22sen
2θ2 + 2`1`2θ1θ2senθ1senθ2. (2.5)
Por tanto, la energía cinética de la segunda masa quedaría de la forma:
T2 =1
2m2(x
22 + y22) =
=1
2m2
[`21θ1cos
2θ1 + `22θ2cos2θ2 + 2`1`2θ1θ2cosθ1cosθ2+
`21θ21sen
2θ1 + `22θ22sen
2θ2 + 2`1`2θ1θ2senθ1senθ2]. (2.6)
Realizando las operaciones oportunas y agrupando términos, obtenemos la siguiente ex-presión de la energía cinética de la segunda masa:
T2 =1
2m2(`
21θ
21 + `22θ
22 + 2`1`2θ1θ2cos(θ1 − θ2)). (2.7)
Miguel Ángel Jiménez Herrera 3 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
Podemos observar cómo el tercer término es el que introduce el acoplamiento entre lospéndulos. Entonces, sumando ambas energías cinéticas y agrupando términos según lasvariables θ1 y θ2, obtenemos la energía cinética total del sistema:
T =1
2(m1 +m2)`
21θ
21 +m2`1`2θ1θ2cos(θ1 − θ2) +
1
2m2`
22θ2. (2.8)
Para encontrar la expresión del potencial V , basta con suponer que nos encontramos enun campo gravitatorio constante, caracterizado por ~g = −9, 81m ·s−2 ~ez. De esta forma, laenergía potencial es la suma de la energía potencial de cada masa (Vi = mi gyi). De nuevo,reagrupando términos, obtenemos:
V = V1 + V2 = (m1 +m2)g`1(1− cosθ1) +m2g`2(1− cosθ2). (2.9)
Partiendo de las expresiones (2.8) y (2.9), podemos escribir el lagrangiano del sistemacomo:
L = T − V =1
2(m1 +m2)`
21θ
21 +m2`1`2θ1θ2cos(θ1 − θ2) +
1
2m2`
22θ2−
−(m1 +m2)g`1(1− cosθ1) +m2g`2(1− cosθ2). (2.10)
A continuación vamos a introducir una serie de aproximaciones a tener en cuenta[2].Estas aproximaciones permitirán simpli�car la expresión de L, dado que si aplicáramosdirectamente las ecuaciones de Euler-Lagrange, obtendríamos unas ecuaciones ciertamentecomplejas e irresolubles de forma analítica.
La primera simpli�cación que aplicaremos será la aproximación del seno por el ángulo,que es válida para ángulos de oscilación pequeños.
senθ ≈ θ (2.11)
Atendiendo al segundo término del lagrangiano, podemos aproximar el coseno de ladiferencia por 1, dada la aproximación anterior.
Para los términos correspondientes a la energía potencial, podemos emplear el desa-rrollo en serie de potencias de Taylor para aproximar los cosenos por:
cosθ ≈ 1− 1
2θ2 (2.12)
Reescribiendo el lagrangiano del sistema, obtenemos,
L =1
2(m1 +m2)`
21θ
21 +m2`1`2θ1θ2 +
1
2m2`
22θ2−
−(m1 +m2)g`1θ21 +m2g`2θ
22, (2.13)
que posee una expresión más simple. Es entonces cuando aplicamos las ecuaciones deEuler-Lagrange para las coordenadas generalizadas escogidas:
d
dt
∂L∂θ1
=∂L∂θ1⇒ (m1 +m2)`
21θ1 +m2`1`2θ2 + (m1 +m2)g`1θ1 = 0 (2.14)
d
dt
∂L∂θ2
=∂L∂θ2⇒ m2`1`2θ1 +m2`
22θ2 +m2g`2θ2 = 0. (2.15)
Miguel Ángel Jiménez Herrera 4 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
De esta forma, trataremos de resolver el problema planteado por el sistema de ecuacio-nes (2.14) y (2.15), que es un sistema de ecuaciones diferenciales lineales homogé-neas de segundo orden acopladas con coe�cientes constantes. Para ello empleare-mos el método de Runge-Kutta de orden 4 imponiendo una serie de valores a las masas ylongitudes, y a los ángulos y velocidades. Así, nuestro PVI (Problema de Valores Iniciales)es el siguiente:
PVI
(m1 +m2)`21θ1 +m2`1`2θ2 + (m1 +m2)g`1θ1 = 0
m2`1`2θ1 +m2`22θ2 +m2g`2θ2 = 0
m1 = 3; m2 = 1
`1 = `2 = 16
θ1(0) = 1; θ2(0) = −1θ1(0) = θ2(0) = 0
(2.16)
3. Resolución del problema (I). Caso lineal. Método de Runge-Kutta de orden 4 (O(h4)).
Una vez presentado el problema (2.16), procederemos a resolverlo. Como hemos indi-cado, emplearemos el método de Runge-Kutta de orden 4 (O(h4)) para ello. En primerlugar, vamos a simpli�car los términos de las ecuaciones, simpli�car la expresión de lasderivadas segundas:
(m1 +m2)`1θ1 +m2`2θ2 + (m1 +m2)gθ1 = 0 (3.1)
`1θ1 + `2θ2 + gθ2 = 0 (3.2)
Ahora debemos despejar las derivadas de mayor orden. Sus expresiones quedarán enfunción de θ1 y θ2, dado que las ecuaciones con las que trabajamos son ecuaciones acopladas:
θ1 =g
`1
(−(1 +
m2
m1
)θ1 +
m2
m1θ2
)= C1θ1 + C2θ2, (3.3)
θ2 =g
`2
(m2
m1+ 1
)(θ1 − θ2) = C3θ1 + C4θ2, (3.4)
donde hemos de�nido las siguientes constantes:
C1 = − g`1
(1 +
m2
m1
), (3.5)
C2 =gm2
`1m1, (3.6)
C3 =g
`2
(m2
m1+ 1
), (3.7)
C4 = − g`2
(m2
m1+ 1
). (3.8)
Para poder resolver el sistema mediante el método de Runge-Kutta de orden 4 debemosreducir el orden de las ecuaciones. Entonces transformamos cada ecuación en un sistema
Miguel Ángel Jiménez Herrera 5 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
nuevamente acoplado, introduciendo las nuevas variables x1, x2, x3 y x4:x1 = θ1 ⇒ x′1 = θ1 = x2
x2 = θ1 ⇒ x′2 = θ1 = C1θ1 + C2θ2 = C1x1 + C2x3
x3 = θ2 ⇒ x′3 = θ2 = x4
x4 = θ2 ⇒ x′4 = θ2 = C3θ1 + C4θ2 = C3x1 + C4x3
(3.9)
Por tanto el sistema ahora a resolver es, en forma matricial:x′1x′2x′3x′4
=
0 1 0 0C1 0 C2 00 0 0 1C3 0 C4 0
x1x2x3x4
. (3.10)
En las siguientes líneas aparece el código empleado para la resolución del problema ante-riormente planteado. Se ha empleado el método de Runge-Kutta de orden 4 (O(h4)). Estemétodo es un método numérico que aproxima la solución de una ecuación diferencial. Escomúnmente empleado dada su rapidez de convergencia. Implementado en MATLAB, nospermitirá encontrar la solución al sistema (3.10).
Más adelante plantearemos un caso no lineal de este problema, y volverá a ser resueltoempleando, esta vez, dos métodos diferentes.
Miguel Ángel Jiménez Herrera 6 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
3.1. Código del programa implementado en MATLAB.
Las siguientes líneas recogen el código del programa implementado en MATLAB queresuelve numéricamente el caso lineal del péndulo doble.
1 %% Trabajo optativo 50: Movimiento de un péndulo doble.2 % Aproximación lineal3 clc4 clear5 clf6 % El presente programa resolverá mediante el método de7 % Runge-Kutta de 4o orden el sistema de ecuaciones diferenciales8 % lineales homogéneas de segundo orden acopladas con9 % coeficientes constantes que modelan el movimiento de un
10 % péndulo doble. En primer lugar definimos los valores11 % iniciales de las magnitudes que intervienen en las ecuaciones.12 % Creamos un vector para las masas y otro para las longitudes13 m(1)=3; m(2)=1;14 l(1)=16; l(2)=16;15 g=9.81;16 % Estos coeficientes permiten simplificar la expresión de la17 % funcion18 k1=(m(2))/(m(1))+1;19 k2=g/l(1);20 k3=g/l(2);21 C1=-k2*k1;22 C2=k2*(k1-1);23 C3=k3*k1;24 C4=-k3*k1;25 % Estos valores son las condiciones iniciales que debemos26 % introducir en la resolución del problema27 alfa1=1; alfa2=-1;% posiciones28 beta1=0; beta2=0;% velocidades29 % Tomamos el intervalo [0, 100] y 10000 iteraciones30 a=0;31 b=100;32 n=10000;33 % Definimos la función vectorial que recibe el método de34 % Runge-Kutta:35 f=@(t, x)([x(2); C1*x(1)+C2*x(3);x(4); C3*x(1)+C4*x(3)]);36 % Definimos los vectores iniciales que el método de Runge-Kutta37 % recibe. En este caso es Y0=Y(a)=Y(0). Este vector38 % contiene también los valores de las derivadas primeras, por39 % haberlas incluido en las variables del sistema:40 y0=[alfa1, beta1, alfa2, beta2];41 % Introducimos el código de la función que resuelve el42 % sistema en el programa. Definimos en primer lugar los43 % parámetros necesarios para la aplicación del método44 % de Runge-Kutta45 h=(b-a)/n;46 hmed=h/2;47 hsext=h/6;48 m=length(y0);49 x=zeros(n+1,1);50 y(1,:)=y0’;51 x(1)=a;
Miguel Ángel Jiménez Herrera 7 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
52 for i=1:n;53 k1=f(x(i),y(i,:))’;54 k2=f(x(i)+hmed, y(i,:)+hmed*k1)’;55 k3=f(x(i)+hmed, y(i,:)+hmed*k2)’;56 k4=f(x(i)+hmed, y(i,:)+h*k3)’;57 y(i+1,:)=y(i,:)+hsext*(k1+2*k2+2*k3+k4);58 x(i+1)=x(i)+h;59 end60 %%%%%%%%%%%%%%%%%%%%61 % Representaciones62 % Ahora extraemos los datos que el método de Runge-Kutta63 % devuelve.64 % La primera figura corresponde con la representación65 % del ángulo theta_1 frente al tiempo66 figure(1)67 plot(x, y(:,1), ’-r’)68 title(’Representación de \theta_1(t) frente a t’,’FontSize’, 15);69 ylabel(’Valores de \theta_1(t)’, ’FontSize’, 15);70 xlabel(’Valores de t’, ’FontSize’, 15);71 legend(’\theta_1(t)’)72 grid on73 axis tight74 % La segunda figura corresponde con la representación75 % del ángulo theta_2 frente al tiempo76 figure(2)77 plot(x, y(:,3), ’-r’)78 title(’Representación de \theta_2(t) frente a t’, ’FontSize’, 15);79 ylabel(’Valores de \theta_2(t)’, ’FontSize’, 15);80 xlabel(’Valores de t’, ’FontSize’, 15);81 legend(’\theta_2(t)’)82 grid on83 axis tight84 % La tercera figura corresponde con la representación85 % de theta_1 y theta_286 figure(3)87 plot(x,y(:,1),’r’)88 hold on89 plot(x,y(:,3))90 title(’Representación de \theta_1(t) y \theta_2(t)’, ...91 ’FontSize’, 15);92 ylabel(’Valores de \theta_i(t)’, ’FontSize’, 15);93 xlabel(’Valores de t’, ’FontSize’, 15);94 legend(’Valores de \theta_1(t)’,’Valores de \theta_2(t)’)95 grid on96 axis tight97 hold off98 % La cuarta figura corresponde con la representación99 % del diagrama de fases del ángulo theta_1100 figure(4)101 plot(y(:,1), y(:,2), ’-k’)102 title([’Representación del diagrama de fases para ’, ...103 ’\theta_1(t)’], ’FontSize’, 15);104 yl=ylabel(’Valores de \theta´_1(t)’);105 set(yl, ’FontSize’, 15);106 xlabel(’Valores de \theta_1(t)’, ’FontSize’, 15);107 legend(’Diagrama de \theta_1(t)’)
Miguel Ángel Jiménez Herrera 8 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
108 grid on109 axis tight110 % La quinta figura corresponde con la representación111 % del diagrama de fases del ángulo theta_2112 figure(5)113 plot(y(:,3), y(:,4),’-k’)114 title([’Representación del diagrama de fases para ’,...115 ’\theta_2(t)’], ’FontSize’, 15);116 ylabel(’Valores de \theta´_2(t)’, ’FontSize’, 15);117 xlabel(’Valores de \theta_2(t)’, ’FontSize’, 15);118 legend(’Diagrama de \theta_2(t)’);119 grid on120 axis tight
3.2. Resultados obtenidos del método de Runge-Kutta de orden 4.
Una vez mostrado el código del programa implementado en MATLAB, procedemos apresentar los resultados en forma grá�ca. Las �guras obtenidas están mostradas a con-tinuación según el orden establecido en el código. Así, en primer lugar presentamos losresultados obtenidos para el ángulo de oscilación θ1(t):
Figura 2: Representación grá�ca de la ecuación de movimiento para θ1.
Observando la grá�ca, el movimiento de θ1(t) no resulta periódico. Este resultado era deesperar, dado que el primer péndulo ve su movimiento perturbado por el segundo péndulo.De la misma forma, la amplitud1 no es constante, pero sí está acotada entre (1,−1), quecorrespondería con los valores de amplitud un péndulo simple de amplitud A = 1.
1Estamos hablando de amplitud angular; la amplitud lineal correspondería con A` = `1senθ1.
Miguel Ángel Jiménez Herrera 9 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
En segundo lugar presentamos los resultados obtenidos para el ángulo de oscilaciónθ2(t):
Figura 3: Representación grá�ca de la ecuación de movimiento para θ2.
La grá�ca de θ2(t) tampoco presenta un movimiento periódico, ni de amplitud cons-tante, al igual que θ1(t). Esta vez, la amplitud se encuentra acotada entre (2,−2), dadoque como valor máximo, la amplitud de cada péndulo es la inicial, que en valor absolutoresulta ser 1 para los dos péndulos. Entonces los dos casos más extremos es que se sumen,o que se resten, dando lugar a un movimiento de amplitud acotada: |A| = |A1|+ |A2| ≤ 2.
La siguiente grá�ca presenta, en unos mismos ejes, las dos grá�cas anteriores. Podemos vercomo, en cierto modo, se conservan las condiciones iniciales, es decir, ambos péndulos seencuentran casi siempre en amplitudes de signo opuesto.
Miguel Ángel Jiménez Herrera 10 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
Figura 4: Grá�ca que recoge los valores de θ1(t), representado en rojo, junto
con los valores de θ2(t), representado en azul.
El hecho de que, por lo general, |A2| ≥ |A1|, se debe a la forma en que escogimosla variable x2, pues recordemos que consistía en el desplazamiento intrínseco del segundocuerpo, x′2 más el desplazamiento del centro de oscilación, x1. Puede llegar a darse laigualdad cuando las amplitudes estén próximas al cambio de signo. Si se da el caso en elque x′2 ≤ 0⇒ A2 ≤ A1.
Ahora procedemos a mostrar los diagramas de fases. Presentamos los resultados obte-nidos para el diagrama de fase del ángulo de oscilación θ1(t) y de θ2(t). Un movimientoperiódico tendría un diagrama de fases que se cerraría sobre sí mismo, superponiéndo-se en cada periodo. La trayectoria de estos diagrama no es cerrada, y en cada ciclo norepite trayectoria, por lo que, en todo el tiempo de simulación, no se superpuso ningúntramo de trayectoria. Observando la �guras siguientes, encontramos otro argumento a lano periodicidad del movimiento de este sistema.
Miguel Ángel Jiménez Herrera 11 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
Figura 5: Diagrama o plano de fases para el movimiento del primer ángulo
θ1(t). En el eje Y se ha representado θ1(t) y, en el X, θ1(t).
Figura 6: Diagrama o plano de fases para el movimiento del segundo ángulo
θ2(t). En el eje Y se ha representado θ2(t) y, en el X, θ2(t).
Miguel Ángel Jiménez Herrera 12 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
Una vez resuelto el caso lineal, vamos a plantear y resolver un caso no lineal, parael cual, eliminaremos la aproximación del seno por el ángulo (2.11). Para encontrar lasecuaciones a resolver, basta con sustituir la variable θi por senθi. Las variables θi y θimantendrán su expresión. En resumen, el nuevo PVI planteado es:
PVI
(m1 +m2)`21θ1 +m2`1`2θ2 + (m1 +m2)g`1senθ1 = 0
m2`1`2θ1 +m2`22θ2 +m2g`2senθ2 = 0
m1 = 3; m2 = 1
`1 = `2 = 16
θ1(0) = 1; θ2(0) = −1θ1(0) = θ2(0) = 0
(3.11)
Que introduce términos no lineales en θ1 y en θ2. Para su resolución, emplearemos dosmétodos:
1. Método de Runge-Kutta de orden 4 (O(h4)).
2. Método predictor-corrector con las fórmulas de Adams-Bashford y de Adams-Moulton.
La simpli�cación que haremos para resolver será la misma empleada en el caso lineal. Parareescribirla en términos no lineales, como hemos indicado, basta con sustituir la variableθi por senθi. Las variables θi y θi mantendrán su expresión:
θ1 =g
`1
(−(1 +
m2
m1
)senθ1 +
m2
m1senθ2
)= C1senθ1 + C2senθ2, (3.12)
θ2 =g
`2
(m2
m1+ 1
)(senθ1 − senθ2) = C3senθ1 + C4senθ2 (3.13)
donde las constantes de�nidas toman las mismas expresiones que las de�nidas en el casolineal:
C1 = − g`1
(1 +
m2
m1
), (3.14)
C2 =gm2
`1m1, (3.15)
C3 =g
`2
(m2
m1+ 1
), (3.16)
C4 = − g`2
(m2
m1+ 1
). (3.17)
Reescribiendo el problema en forma matricial, previamente habiendo introducido las varia-bles x1, x2, x3, x4, debemos tener en cuenta que las variables θi y θi permanecen invariantestras haber introducido la aproximación (2.11). Así, la expresión en las variables x1, x2, x3, x4es:
x1 = θ1 ⇒ x′1 = θ1 = x2
x2 = θ1 ⇒ x′2 = θ1 = C1θ1 + C2θ2 = C1senx1 + C2senx3
x3 = θ2 ⇒ x′3 = θ2 = x4
x4 = θ2 ⇒ x′4 = θ2 = C3θ1 + C4θ2 = C3senx1 + C4senx3
(3.18)
Miguel Ángel Jiménez Herrera 13 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
Por tanto el sistema ahora a resolver es, en forma matricial:x′1x′2x′3x′4
=
0 1 0 0C1 0 C2 00 0 0 1C3 0 C4 0
senx1x2
senx3x4
. (3.19)
En las siguientes secciones presentamos los resultados obtenidos tras aplicar los métodosde Runge-Kutta de orden 4 y las fórmulas de Adams.
4. Resolución del problema (II). Caso no lineal (I). Métodode Runge-Kutta de orden 4 (O(h4)).
4.1. Código del programa implementado en MATLAB.
Las siguientes líneas recogen el código del programa que resuelve el caso no linealplanteado anteriormente, empleando el método de Runge-Kutta de orden 4.
1 %% Trabajo optativo 50: Movimiento de un péndulo doble.2 % Aproximación no lineal. Runge-Kutta de orden 43 clc4 clear5 clf6 % El presente programa resolverá mediante el método de7 % Runge-Kutta de 4o orden el sistema de ecuaciones diferenciales8 % no lineales homogéneas de segundo orden acopladas con9 % coeficientes constantes que modelan el movimiento de
10 % un péndulo doble. En primer lugar definimos los valores11 % iniciales de las magnitudes que intervienen en las ecuaciones.12 % Creamos un vector para las masas y otro para las longitudes13 m(1)=3; m(2)=1;14 l(1)=16; l(2)=16;15 g=9.81;16 % Estos coeficientes permiten simplificar la expresión de la17 % funcion18 k1=(m(2))/(m(1))+1;19 k2=g/l(1);20 k3=g/l(2);21 C1=-k2*k1;22 C2=k2*(k1-1);23 C3=k3*k1;24 C4=-k3*k1;% Estos valores son las condiciones iniciales que debemos25 % introducir en la resolución del problema26 alfa1=1; alfa2=-1;27 beta1=0; beta2=0;28 % Tomamos el intervalo [0, 100] y 10000 iteraciones29 a=0;30 b=100;31 n=1000;32 % Para realizar la aproximación no lineal, deshacemos33 % el cambio del seno por el ángulo. Esto se traduce en cambiar34 % theta_1 por sen(theta_1) y theta_2 por sen(theta_2).35 % Las demas aproximaciones se mantendrán.36 % Debemos redefinir la función:
Miguel Ángel Jiménez Herrera 14 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
37 f=@(t, x)([x(2); C1*sin(x(1))+C2*sin(x(3));x(4); ...38 C3*sin(x(1))+C4*sin(x(3))]);39 % El vector será el mismo que en el caso lineal.40 y0=[alfa1, beta1, alfa2, beta2];41 % Introducimos de nuevo el código en el programa y42 % definimos los prámetros requeridos43 h=(b-a)/n;44 hmed=h/2;45 hsext=h/6;46 m=length(y0);47 x=zeros(n+1,1);48 y(1,:)=y0’;49 x(1)=a;50 for i=1:n;51 k1=f(x(i),y(i,:))’;52 k2=f(x(i)+hmed, y(i,:)+hmed*k1)’;53 k3=f(x(i)+hmed, y(i,:)+hmed*k2)’;54 k4=f(x(i)+hmed, y(i,:)+h*k3)’;55 y(i+1,:)=y(i,:)+hsext*(k1+2*k2+2*k3+k4);56 x(i+1)=x(i)+h;57 end58 %%%%%%%%%%%%%%%%%%%%59 % Representaciones60 % Ahora extraemos los datos que el método de Runge-Kutta61 % devuelve.62 % La primera figura corresponde con la representación63 % del ángulo theta_1 frente al tiempo64 figure(1)65 plot(x, y(:,1), ’-r’)66 title(’Representación de \theta_1(t) frente a t’,’FontSize’, 15);67 ylabel(’Valores de \theta_1(t)’, ’FontSize’, 15);68 xlabel(’Valores de t’, ’FontSize’, 15);69 legend(’\theta_1(t)’)70 grid on71 axis tight72 % La segunda figura corresponde con la representación73 % del ángulo theta_2 frente al tiempo74 figure(2)75 plot(x, y(:,3), ’-r’)76 title(’Representación de \theta_2(t) frente a t’, ’FontSize’, 15);77 ylabel(’Valores de \theta_2(t)’, ’FontSize’, 15);78 xlabel(’Valores de t’, ’FontSize’, 15);79 legend(’\theta_2(t)’)80 grid on81 axis tight82 % La tercera figura corresponde con la representación83 % de theta_1 y theta_284 figure(3)85 plot(x,y(:,1),’r’)86 hold on87 plot(x,y(:,3))88 title(’Representación de \theta_1(t) y \theta_2(t)’, ...89 ’FontSize’, 15);90 ylabel(’Valores de \theta_i(t)’, ’FontSize’, 15);91 xlabel(’Valores de t’, ’FontSize’, 15);92 legend(’Valores de \theta_1(t)’,’Valores de \theta_2(t)’)
Miguel Ángel Jiménez Herrera 15 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
93 grid on94 axis tight95 hold off96 % La cuarta figura corresponde con la representación97 % del diagrama de fases del ángulo theta_198 figure(4)99 plot(y(:,1), y(:,2), ’-k’)100 title([’Representación del diagrama de fases para ’, ...101 ’\theta_1(t)’], ’FontSize’, 15);102 yl=ylabel(’Valores de \theta´_1(t)’);103 set(yl, ’FontSize’, 15);104 xlabel(’Valores de \theta_1(t)’, ’FontSize’, 15);105 legend(’Diagrama de \theta_1(t)’)106 grid on107 axis tight108 % La quinta figura corresponde con la representación109 % del diagrama de fases del ángulo theta_2110 figure(5)111 plot(y(:,3), y(:,4),’-k’)112 title([’Representación del diagrama de fases para ’,...113 ’\theta_2(t)’], ’FontSize’, 15);114 ylabel(’Valores de \theta´_2(t)’, ’FontSize’, 15);115 xlabel(’Valores de \theta_2(t)’, ’FontSize’, 15);116 legend(’Diagrama de \theta_2(t)’);117 grid on118 axis tight
4.2. Resultados obtenidos por el método de Runge-Kutta de orden 4.
Una vez mostrado el código del programa implementado en MATLAB, procedemos apresentar los resultados en forma grá�ca. Las �guras obtenidas están mostradas a con-tinuación según el orden establecido en el código. Así, en primer lugar presentamos losresultados obtenidos para el ángulo de oscilación θ1(t):
Figura 7: Representación grá�ca de la ecuación de movimiento para θ1.
Miguel Ángel Jiménez Herrera 16 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
Observando la grá�ca, el movimiento de θ1(t) resulta ser cuasiperiódico2 . Dadas lascondiciones iniciales, podemos darle una explicación a este resultado. Dado que este modelono lineal se aproxima mejor al modelo real, y dado que las apmlitudes iniciales son opuestas,se produce un movimiento de vaivén simultáneo y opuesto de ambos cuerpos. La amplitud3
no es constante, pero sí está acotada entre (1,−1), que correspondería con los valores deamplitud un péndulo simple de amplitud A = 1. La amplitud tiene una serie de mínimos,que deben corresponder con los máximos de amplitud del segundo cuerpo.
En segundo lugar presentamos los resultados obtenidos para el ángulo de oscilación θ2(t):
Figura 8: Representación grá�ca de la ecuación de movimiento para θ2.
La grá�ca de θ2(t) vuelve a presentar un movimiento cuasiperiódico4 de amplitud noconstante, al igual que θ1(t). Parece ser que la grá�ca de θ2(t) es igual y opuesta a la deθ1(t), por el hecho del vaivén simultáneo descrito anteriormente.
La siguiente grá�ca presenta, en unos mismos ejes, las dos grá�cas anteriores. Podemosver como, en cierto modo, se conservan las condiciones iniciales, es decir, ambos péndulosse encuentran siempre en amplitudes de signo opuesto, pero en ningún momento estasamplitudes toman el mismo valor (en valor absoluto).
2La justi�cación de este término reside en las grá�cas de los planos de fases no lineales.3Estamos hablando de amplitud angular; la amplitud lineal correspondería con A` = `1senθ1.4La justi�cación de este término reside en las grá�cas de los planos de fases no lineales.
Miguel Ángel Jiménez Herrera 17 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
Figura 9: Grá�ca que recoge los valores de θ1(t), representado en rojo, junto
con los valores de θ2(t), representado en azul.
Podemos comprobar de nuevo cómo ambos cuerpos se encuentran siempre en amplitu-des de distinto signo, hecho justi�cado por el ya mencionado vaivén opuesto y simultáneode ambos cuerpos.
Ahora procedemos a mostrar los diagramas de fases. Presentamos los resultados obte-nidos para el diagrama de fase del ángulo de oscilación θ1(t) y de θ2(t). Un movimientoperiódico tendría un diagrama de fases que se cerraría sobre sí mismo, superponiéndoseen cada periodo. La trayectoria de estos diagrama no es cerrada, y en cada ciclo no repitetrayectoria, por lo que, en todo el tiempo de simulación, no se superpuso ningún tramode la misma. Sin embargo, las trayectorias están muy próximas entre sí, lo que justi�ca elhecho de que el movimiento resulte cuasiperiódico.
Miguel Ángel Jiménez Herrera 18 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
Figura 10: Diagrama o plano de fases para el movimiento del primer ángulo
θ1(t). En el eje Y se ha representado θ1(t) y, en el X, θ1(t).
Figura 11: Diagrama o plano de fases para el movimiento del segundo ángulo
θ2(t). En el eje Y se ha representado θ2(t) y, en el X, θ2(t).
Miguel Ángel Jiménez Herrera 19 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
5. Resolución del problema (III). Caso no lineal (II). Fórmu-las de Adams-Bashford y de Adams-Moulton de orden 4(O(h4)).
5.1. Código del programa implementado en MATLAB.
Las siguientes líneas recogen el código del programa que resuelve el caso no linealplanteado con anterioridad, esta vez, mediante el método predictor-corrector y las fórmulasde Adams-Bashford y de Adams-Moulton de orden 4 (O(h4)).
1 %% Trabajo optativo 50: Movimiento de un péndulo doble.2 % Aproximación no lineal. Fórmulas de Adams de orden 43 clear4 clc5 clf6 % El presente programa resolverá mediante el método de7 % Runge-Kutta de 4o orden el sistema de ecuaciones diferenciales8 % no lineales homogéneas de segundo orden acopladas con9 % coeficientes constantes que modelan el movimiento de
10 % un péndulo doble, empleando además la fórmula explícita11 % de Adams-Bashforth y la fórmula implícita de Adams-Moulton.12 % En primer lugar definimos los valores iniciales de las13 % magnitudes que intervienen en las ecuaciones.14 % Creamos un vector para las masas y otro para las longitudes15 m(1)=3; m(2)=1;16 l(1)=16; l(2)=16;17 g=9.81;18 % Estos coeficientes permiten simplificar la expresión de la19 % funcion20 k1=(m(2))/(m(1))+1;21 k2=g/l(1);22 k3=g/l(2);23 C1=-k2*k1;24 C2=k2*(k1-1);25 C3=k3*k1;26 C4=-k3*k1;27 % Estos valores son las condiciones iniciales que debemos28 % introducir en la resolución del problema29 alfa1=1; alfa2=-1;30 beta1=0; beta2=0;31 % Tomamos el intervalo [0, 100] y 1000 iteraciones32 a=0;33 b=100;34 n=1000;35 % Para realizar la aproximación no lineal, deshacemos36 % el cambio del seno por el ángulo. Esto se traduce en cambiar37 % theta_1 por sen(theta_1) y theta_2 por sen(theta_2).38 % Las demas aproximaciones se mantendrán.39 % Debemos redefinir la función:40 f=@(t, x)([x(2); C1*sin(x(1))+C2*sin(x(3));x(4); ...41 C3*sin(x(1))+C4*sin(x(3))]);42 % El vector será el mismo que en el caso lineal.43 y0=[alfa1, beta1, alfa2, beta2];44 % Introducimos de nuevo el código en el programa y
Miguel Ángel Jiménez Herrera 20 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
45 % definimos los prámetros requeridos46 h=(b-a)/n;47 hmed=h/2;48 hsext=h/6;49 h24=h/24;50 m=length(y0);51 x=zeros(n+1,1);52 y=zeros(n+1,4);53 y(1,:)=y0’;54 % ytem es el vector de soluciones de y aproximadas calculadas con55 % la formula explicita de Adams-Bashford56 ytem=zeros(n+1,4);57 x(1)=a;58 % Empleamos el método de Runge-Kutta para calcular los primeros59 % 4 terminos del vector "y", dado que las formulas de Adams60 % necesitan como minimo 4 puntos anteriores al que queremos61 % calcular62 for i=1:463 % Calculamos los valores de las k_i que involucra el metodo de64 % Runge-Kutta65 % son valores que dependen de la y_i empleados para calcular la66 % y_i+167 k1=f(x(i),y(i,:))’;68 k2=f(x(i)+hmed, y(i,:)+hmed*k1)’;69 k3=f(x(i)+hmed, y(i,:)+hmed*k2)’;70 k4=f(x(i)+h, y(i,:)+h*k3)’;71 y(i+1,:)=y(i,:)+hsext*(k1+2*k2+2*k3+k4);72 x(i+1)=x(i)+h;73 end74 % Ahora abrimos el bucle para calcular los sucesivos75 % terminos de "y" empleando primero una aproximacion76 % del mismo y despues introduciendolo en la formula77 % implicita78 for j=4:n79 ytem(j+1,:)=y(j,:)+h24*(55*f(x(j),y(j,:))’-59*f(x(j-1),...80 y(j-1,:))’+37*f(x(j-2),y(j-2,:))’-9*f(x(j-3),y(j-3,:))’);81 x(j+1)=x(j)+h;82 y(j+1,:)=y(j,:)+h24*(9*f(x(j+1),ytem(j+1,:))’+19*f(x(j),y(j,:))’...83 -5*f(x(j-1),y(j-1,:))’+f(x(j-2),y(j-2,:))’);84 end85 %%%%%%%%%%%%%%%%%%%%86 % Representaciones87 % Ahora extraemos los datos que el método predictor-corrector88 % devuelve.89 % La primera figura corresponde con la representación90 % del ángulo theta_1 frente al tiempo91 figure(1)92 plot(x, y(:,1), ’-r’)93 title(’Representación de \theta_1(t) frente a t’,’FontSize’, 15);94 ylabel(’Valores de \theta_1(t)’, ’FontSize’, 15);95 xlabel(’Valores de t’, ’FontSize’, 15);96 legend(’\theta_1(t)’)97 grid on98 axis tight99 % La segunda figura corresponde con la representación100 % del ángulo theta_2 frente al tiempo
Miguel Ángel Jiménez Herrera 21 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
101 figure(2)102 plot(x, y(:,3), ’-r’)103 title(’Representación de \theta_2(t) frente a t’, ’FontSize’, 15);104 ylabel(’Valores de \theta_2(t)’, ’FontSize’, 15);105 xlabel(’Valores de t’, ’FontSize’, 15);106 legend(’\theta_2(t)’)107 grid on108 axis tight109 % La tercera figura corresponde con la representación110 % de theta_1 y theta_2111 figure(3)112 plot(x,y(:,1),’r’)113 hold on114 plot(x,y(:,3))115 title(’Representación de \theta_1(t) y \theta_2(t)’, ...116 ’FontSize’, 15);117 ylabel(’Valores de \theta_i(t)’, ’FontSize’, 15);118 xlabel(’Valores de t’, ’FontSize’, 15);119 legend(’Valores de \theta_1(t)’,’Valores de \theta_2(t)’)120 grid on121 axis tight122 hold off123 % La cuarta figura corresponde con la representación124 % del diagrama de fases del ángulo theta_1125 figure(4)126 plot(y(:,1), y(:,2), ’-k’)127 title([’Representación del diagrama de fases para ’, ...128 ’\theta_1(t)’], ’FontSize’, 15);129 yl=ylabel(’Valores de \theta´_1(t)’);130 set(yl, ’FontSize’, 15);131 xlabel(’Valores de \theta_1(t)’, ’FontSize’, 15);132 legend(’Diagrama de \theta_1(t)’)133 grid on134 axis tight135 % La quinta figura corresponde con la representación136 % del diagrama de fases del ángulo theta_2137 figure(5)138 plot(y(:,3), y(:,4),’-k’)139 title([’Representación del diagrama de fases para ’,...140 ’\theta_2(t)’], ’FontSize’, 15);141 ylabel(’Valores de \theta´_2(t)’, ’FontSize’, 15);142 xlabel(’Valores de \theta_2(t)’, ’FontSize’, 15);143 legend(’Diagrama de \theta_2(t)’);144 grid on145 axis tight
Miguel Ángel Jiménez Herrera 22 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
5.2. Resultados obtenidos por el método predictor-corrector.
Una vez mostrado el código del programa implementado en MATLAB, procedemos apresentar los resultados en forma grá�ca. Las �guras obtenidas están mostradas a continua-ción según el orden establecido en el código. Como era de esperar, los resultados coincidenentre los métodos de Runge-Kutta y el método predictor-corrector, habiendo usado el mis-mo intervalo y un mismo paso de discretización. Así, en primer lugar presentamos losresultados obtenidos para el ángulo de oscilación θ1(t):
Figura 12: Representación grá�ca de la ecuación de movimiento para θ1.
Observando la grá�ca, el movimiento de θ1(t) resulta ser cuasiperiódico5. Dadas lascondiciones iniciales, podemos darle una explicación a este resultado. Dado que este modelono lineal se aproxima mejor al modelo real, y dado que las amplitudes iniciales son opuestas,se produce un movimiento de vaivén simultáneo y opuesto de ambos cuerpos. La amplitud6
no es constante, pero sí está acotada entre (1,−1), que correspondería con los valores deamplitud un péndulo simple de amplitud A = 1. La amplitud tiene una serie de mínimos,que deben corresponder con los máximos de amplitud del segundo cuerpo.
5La justi�cación de este término reside en las grá�cas de los planos de fases no lineales.6Estamos hablando de amplitud angular; la amplitud lineal correspondería con A` = `1senθ1.
Miguel Ángel Jiménez Herrera 23 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
En segundo lugar presentamos los resultados obtenidos para el ángulo de oscilaciónθ2(t):
Figura 13: Representación grá�ca de la ecuación de movimiento para θ2.
La grá�ca de θ2(t) vuelve a presentar un movimiento cuasiperiódico7 de amplitud noconstante, al igual que θ1(t). Parece ser que la grá�ca de θ2(t) es igual y opuesta a la deθ1(t), por el hecho del vaivén simultáneo descrito anteriormente.
La siguiente grá�ca presenta, en unos mismos ejes, las dos grá�cas anteriores. Podemosver como, en cierto modo, se conservan las condiciones iniciales, es decir, ambos péndulosse encuentran casi siempre en amplitudes de signo opuesto.
7La justi�cación de este término reside en las grá�cas de los planos de fases no lineales.
Miguel Ángel Jiménez Herrera 24 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
Figura 14: Grá�ca que recoge los valores de θ1(t), representado en rojo, junto
con los valores de θ2(t), representado en azul.
Podemos comprobar de nuevo cómo ambos cuerpos se encuentran siempre en amplitu-des de distinto signo, hecho justi�cado por el ya mencionado vaivén opuesto y simultáneode ambos cuerpos.
Ahora procedemos a mostrar los diagramas de fases. Presentamos los resultados obte-nidos para el diagrama de fase del ángulo de oscilación θ1(t) y de θ2(t). Un movimientoperiódico tendría un diagrama de fases que se cerraría sobre sí mismo, superponiéndoseen cada periodo. La trayectoria de estos diagrama no es cerrada, y en cada ciclo no repitetrayectoria, por lo que, en todo el tiempo de simulación, no se superpuso ningún tramode la misma. Sin embargo, las trayectorias están muy próximas entre sí, lo que justi�ca elhecho de que el movimiento resulte cuasiperiódico.
Miguel Ángel Jiménez Herrera 25 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
Figura 15: Diagrama o plano de fases para el movimiento del primer ángulo
θ1(t). En el eje Y se ha representado θ1(t) y, en el X, θ1(t).
Figura 16: Diagrama o plano de fases para el movimiento del segundo ángulo
θ2(t). En el eje Y se ha representado θ2(t) y, en el X, θ2(t).
Miguel Ángel Jiménez Herrera 26 Métodos Numéricos y Simulación

Trabajo 50: Péndulo Doble
En la bibiografía se encuentran las fuentes de información empleadas para la elabo-ración de este trabajo. Hay también presentes unos enlaces a páginas web que contienensimulaciones interactivas del péndulo doble (ver [4], [8],[9]), las cuales han sido empleadaspara dar signi�cado a las �guras descritas anteriormente. También aparece un enlace auna simulación del péndulo doble implementada en MATLAB [3], en el caso totalmenteno lineal, es decir, sin introducir las simpli�caciones hechas en la sección 2.
6. Bibliografía
[1] e-Learning UCO, Métodos Numéricos y Simulación http://www3.uco.es/m1415/course/view.php?id=363
[2] John R. Taylor,Classical Mechanics. Colorado, 2013, ISBN 978-84-291-4312-6.
[3] MATLAB Central, File Exchange - Animated Double Pendulum:http://www.mathworks.com/matlabcentral/fileexchange/27212-animated-double-pendulum
[4] Université de Nantes - Figures Animées pour la Physique: http://www.sciences.univ-nantes.fr/sites/genevieve_tulloue/Meca/Systemes/pendule_double.html
[5] Wikipedia, la enciclopedia libre - Péndulo Doble: http://es.wikipedia.org/wiki/Doble_p%C3%A9ndulo
[6] Wikipedia, the free encyclopedia - Double Pendulum:http://en.wikipedia.org/wiki/Double_pendulum
[7] Wolfram Research - Double Pendulum http://scienceworld.wolfram.com/physics/DoublePendulum.html
[8] Wolfram Demonstration Project - Double Pendulum: http://demonstrations.wolfram.com/DoublePendulum/
[9] Wolfram Demonstration Project - Normal Modes Of A Double Pendulum http://demonstrations.wolfram.com/NormalModesOfADoublePendulum/
Miguel Ángel Jiménez Herrera 27 Métodos Numéricos y Simulación