Mecánica - Pumalino's Blog · PDF fileEn el contenido de física de 2º...
6
Física 3° Año Medio Mecánica 22 La aceleración centrípeta En un movimiento circular cualquiera, la aceleración puede tener una componente en dirección tangencial a la circunferencia y otra componente en dirección radial y dirigida hacia el centro de la trayectoria. A la primera se le llama aceleración tangencial y a la segunda, aceleración centrípeta. La aceleración tangencial se manifiesta como un cambio en el módulo de la velocidad tangencial, mientras que la aceleración centrípeta aparece como un cambio en la dirección y sentido de la velocidad. En un movimiento circular uniforme, debido a que el módulo de la velocidad tangencial es constante, solo existe una aceleración que cambia la dirección y el sentido de la velocidad, es decir, la aceleración centrípeta. El cambio del vector velocidad tangencial apunta hacia el centro de curvatura, al igual que la aceleración centrípeta a c ( ) . El vector aceleración centrípeta y el cambio del vector velocidad tangencial se relacionan de la siguiente forma: a v t c = ∆ ∆ (1.16) La ecuación (1.16) implica que el vector aceleración centrípeta tiene la misma dirección y el mismo sentido que el cambio de velocidad. Figura 1.9. ∆r es el cambio de po- sición de un móvil en M.C.U. en un intervalo de tiempo muy pequeño. ∆v corresponde al cambio de velocidad en el mismo intervalo. De acuerdo a la Figura 1.9, en el M.C.U. se cumplen las siguientes condiciones: r r r v v v i f i f = = = = (1.17) Además, r v ⊥ en todo momento, por lo tanto: ∼ AOB AOB ′ ′′ (son triángulos semejantes). (Continúa en la página 23) Figura 1.8. Si se considera el cambio de velocidad, ∆ = − v v v f i , que experimenta un móvil en un pequeño intervalo de tiempo ∆ ( ) t , se ve que ∆v es radial y está dirigido hacia el centro curvatura. La aceleración, por lo tanto, también tiene esa dirección y sentido, y por eso se denomina aceleración centrípeta. r f r i v i v f -v i v f Δv f v i v � � � � �� � � f v i v � v � i r � � � r � � �� f r
-
Upload
truongtram -
Category
Documents
-
view
239 -
download
3
Transcript of Mecánica - Pumalino's Blog · PDF fileEn el contenido de física de 2º...

Física 3° Año Medio
Mecánica
22
La aceleración centrípetaEn un movimiento circular cualquiera, la aceleración puede tener una componente en dirección tangencial a la circunferencia y otra componente en dirección radial y dirigida hacia el centro de la trayectoria. A la primera se le llama aceleración tangencial y a la segunda, aceleración centrípeta.
La aceleración tangencial se manifi esta como un cambio en el módulo de la velocidad tangencial, mientras que la aceleración centrípeta aparece como un cambio en la dirección y sentido de la velocidad.
En un movimiento circular uniforme, debido a que el módulo de la velocidad tangencial es constante, solo existe una aceleración que cambia la dirección y el sentido de la velocidad, es decir, la aceleración centrípeta.
El cambio del vector velocidad tangencial apunta hacia el centro de curvatura, al igual que la aceleración centrípeta ac
( ) .
El vector aceleración centrípeta y el cambio del vector velocidad tangencial se relacionan de la siguiente forma:
a vtc
= ∆
∆ (1.16)
La ecuación (1.16) implica que el vector aceleración centrípeta tiene la misma dirección y el mismo sentido que el cambio de velocidad.
Figura 1.9. ∆r
es el cambio de po-
sición de un móvil en M.C.U. en un
intervalo de tiempo muy pequeño. ∆v
corresponde al cambio de velocidad
en el mismo intervalo.
De acuerdo a la Figura 1.9, en el M.C.U. se cumplen las siguientes condiciones:
r r r
v v v
i f
i f
= =
= = (1.17)
Además, r v
⊥ en todo momento, por lo tanto: ∼AOB A O B′ ′ ′ (son triángulos semejantes).
(Continúa en la página 23) Figura 1.8. Si se considera el cambio de velocidad, ∆ = −v v vf i
, que
experimenta un móvil en un pequeño intervalo de tiempo ∆( )t , se ve que
∆v
es radial y está dirigido hacia el centro curvatura. La aceleración, por
lo tanto, también tiene esa dirección y sentido, y por eso se denomina
aceleración centrípeta.
rf
ri
vi
vf
-vi
vf
Δv
fviv
�
�
�
�
��
��
fv
iv
�
v�
ir
�
�
�
r�
�
��
fr
FISICA_2010_OK.indd 22 21/7/10 17:04:45

23
Capítulo 1: Movimiento Circular
De acuerdo a la ecuación (1.26), para determinar la aceleración centrípeta se puede utilizar la siguiente relación:
a vrc =2
(1.18)
Ahora, si recordamos que (1.9), podemos deducir que la aceleración centrípeta también puede ser determinada como:
a rc = ⋅ω2 (1.19)
La fuerza centrípetaEn la mecánica de Newton, los cambios en el movimiento son explicados por medio de fuerzas de interacción. En particular, la segunda ley establece que la fuerza neta, es decir, la suma de todas las fuerzas que actúan sobre un cuerpo, es proporcional a la aceleración del cuerpo:
F F maneta
= =∑ (1.20)
Considerando solo el módulo de los vectores, también podemos escribir la ecuación (1.20) como:
F maneta = (1.21)
En un movimiento circular, la fuerza que permite este tipo de trayectoria es la fuerza que apunta hacia el centro de curvatura y la denominamos fuerza centrípeta.
De acuerdo con la segunda ley de Newton, la fuerza centrípeta provoca una aceleración centrípeta y, por lo tanto, en términos de sus módulos, la ley se puede expresar de la siguiente forma:
F mac c= (1.22)
Ejemplo 4
En el contenido de física de 2º medio, aprendimos que el radio orbital medio de la Tierra alrededor del Sol es de 1,49 · 1011 my su masa es de 5,98 · 1024 Kg.
a) ¿Cuál es la aceleración centrípeta y la fuerza centrípeta que ejerce el Sol sobre la Tierra?
b) De acuerdo a este resultado, ¿nuestro planeta puede ser considerado como un sistema inercial?
(Continuación)
Dadas las condiciones geométricas de las ecuaciones (1.17) en la Figura 1.9 y la relación de semejanza entre los triángulos AOB y ′ ′ ′A O B , pode-mos ver que:
∆=
∆vv
rr
(1.23)
Al sustituir a vtc
= ∆
∆ , en la ecuación
(1.23), se obtiene:
a tv
rr
a r vr t
a rtvr
a v vr
vr
c
c
c
c
⋅ ∆= ∆
= ∆ ⋅⋅ ∆
= ∆∆ ⋅
= ⋅ =2
(1.24)
Donde hemos simplifi cado la notación, ya que:
a a
r r
c c
=
∆ = ∆ (1.25)
Es decir, en términos de magnitudes podemos escribir el módulo de la ace-leración centrípeta como:
a vrc =2 (1.26)
Por lo tanto, la magnitud o módulo de la aceleración centrípeta es constante en un M.C.U.
Sección 1: Movimiento circular uniforme
∑ es la letra griega “sigma” y se usa para representar una sumatoria.
FISICA_2010_OK.indd 23 21/7/10 17:05:02
Física 3° Año Medio
Mecánica
24
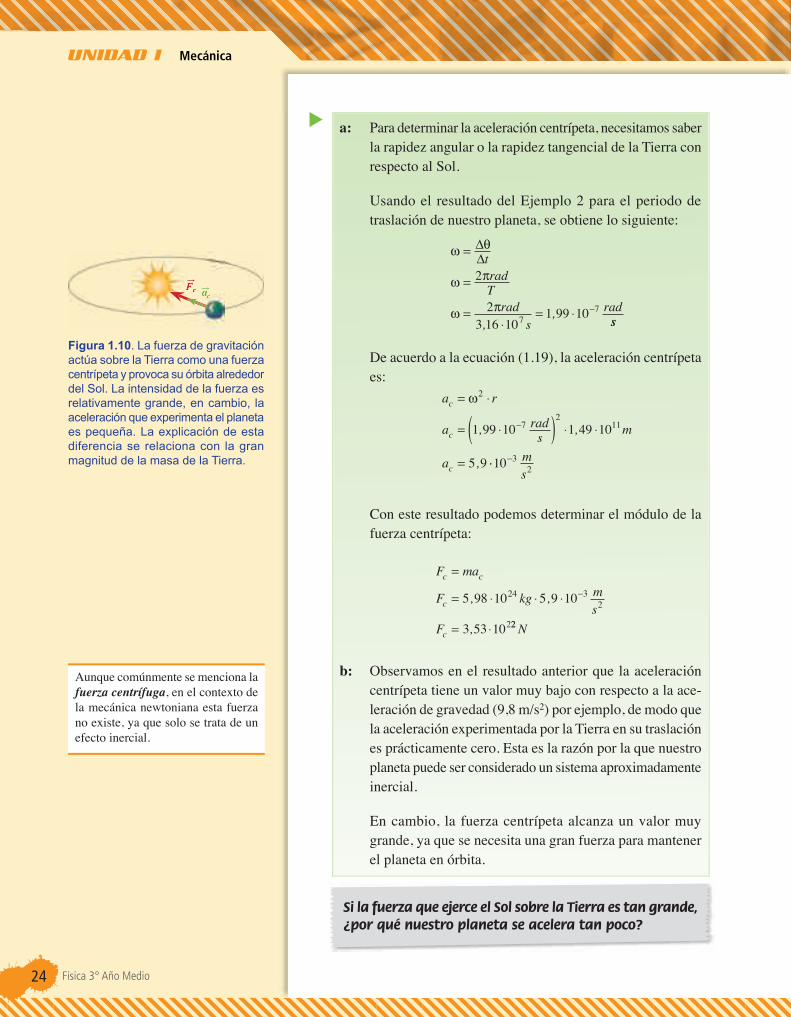
a: Para determinar la aceleración centrípeta, necesitamos saber la rapidez angular o la rapidez tangencial de la Tierra con respecto al Sol.
Usando el resultado del Ejemplo 2 para el periodo de traslación de nuestro planeta, se obtiene lo siguiente:
ω θ
ω π
ω π
= ∆∆
=
=⋅
= ⋅ −
tradTrad
srad
2
23 16 10
1 99 1077
,, ss
De acuerdo a la ecuación (1.19), la aceleración centrípeta es:
a r
a rads m
a
c
c
c
= ⋅
= ⋅( ) ⋅ ⋅
=
−
ω2
72
111 99 10 1 49 10
5 9
, ,
, ⋅⋅ −10 32ms
Con este resultado podemos determinar el módulo de la fuerza centrípeta:
F ma
F kg ms
F
c c
c
c
=
= ⋅ ⋅ ⋅
= ⋅
−5 98 10 5 9 10
3 53 10
24 32
2
, ,
, 22N
b: Observamos en el resultado anterior que la aceleración centrípeta tiene un valor muy bajo con respecto a la ace-leración de gravedad (9,8 m/s2) por ejemplo, de modo que la aceleración experimentada por la Tierra en su traslación es prácticamente cero. Esta es la razón por la que nuestro planeta puede ser considerado un sistema aproximadamente inercial.
En cambio, la fuerza centrípeta alcanza un valor muy grande, ya que se necesita una gran fuerza para mantener el planeta en órbita.
Si la fuerza que ejerce el Sol sobre la Tierra es tan grande, ¿por qué nuestro planeta se acelera tan poco?
Figura 1.10. La fuerza de gravitación actúa sobre la Tierra como una fuerza centrípeta y provoca su órbita alrededor del Sol. La intensidad de la fuerza es relativamente grande, en cambio, la aceleración que experimenta el planeta es pequeña. La explicación de esta diferencia se relaciona con la gran magnitud de la masa de la Tierra.
FcFcF ac
Aunque comúnmente se menciona la fuerza centrífuga, en el contexto de la mecánica newtoniana esta fuerza no existe, ya que solo se trata de un efecto inercial.
FISICA_2010_OK.indd 24 21/7/10 17:05:15

15
Capítulo 1: Movimiento Circular
Movimiento circular uniforme (M.C.U.)
La trayectoria circularUn móvil puede moverse describiendo cualquier tipo de trayectoria. Por ejemplo, en una carretera un automóvil puede moverse descri-biendo una línea recta, pero cuando llega a una curva pronunciada, generalmente su trayectoria es un arco de circunferencia.
Para describir la distancia, la posición o el desplazamiento en un movimiento rectilíneo, utilizamos como unidad de medida el metro [m]; en cambio, en la descripción del movimiento circular usamos el metro como unidad de distancia o arco recorrido, y para determinar la posición y el desplazamiento utilizamos también una unidad angular, conocida como radián [rad].
Lo anterior se debe a que en el movimiento circular es fundamental la relación entre los tres elementos que se muestran en la Figura 1.1:el arco recorrido (∆s), el radio de curvatura (r) y el ángulo des-crito (∆θ).
Figura 1.2. La trayectoria de un planeta en torno al Sol puede ser considerada como una trayectoria circular.
Figura 1.3. Representación geométrica de 1 rad.
Un radián (1 rad) es la unidad para medir ángulos o desplazamiento angular en el Sistema Internacional de Unidades (S.I.).Corresponde al cuociente entre un arco de circunferencia (∆s), cuya longitud es igual al radio (∆s = r), y el valor del radio r:
∆θ = ∆ = =sr
rr rad1 (1.1)
1 radián mide, aproximadamente, 57,3°y una vuelta o revolución mide360° = 6,28 rad = 2π rad.
El radián, al no tener dimensión, opera como neutro multiplicativo, es decir:
1rad · 1m = 1m (1.2)
1 radr
longitud = r
r
∆θ
s∆
móvil
eje de referencia
Figura 1.1. Movimiento circular de un automóvil en una pista de carre-ras, r es el radio de curvatura, ∆s es el arco recorrido y ∆θ es el ángulo descrito.
La posición de un móvil en movimiento circular queda defi nida por el ángulo descrito respecto a un eje de referencia. Este ángulo se mide en radianes.
1
Sección 1: Movimiento circular uniforme
Sección
∆ es la letra griega “delta” que utiliza-mos en física para indicar diferencia o cambio. θ es la letra griega “theta” que utilizamos para indicar una medida angular. Por lo tanto, ∆θ indica una diferencia angular.
FISICA_2010_OK.indd 15 21/7/10 17:02:51

Física 3° Año Medio
Mecánica
16
Cuando cambia la posición del móvil, decimos que realiza un desplazamiento angular ∆θ, desde un ángulo inicial θi hasta un ángulo final θf:
∆θ = θf − θi (1.3)
Como se muestra en la Figura 1.4, si el objeto en movimiento describe un desplazamiento angular ∆θ, expresado en radianes, hay un arco de circunferencia ∆s asociado a este desplazamiento. Estos elementos se relacionan a través del radio de curvatura, de la siguiente manera:
∆ = ∆θ sr (1.4)
De la ecuación (1.4) se puede despejar el arco de circunferencia, quedando la relación como sigue:
∆ ⋅ = ∆θ r s (1.5)
La ecuación (1.5) muestra que la distancia recorrida es direc-tamente proporcional al ángulo descrito por el móvil. Si ahora relacionamos el cambio de posición con el intervalo de tiempo (∆t) en que este cambio ocurre, obtenemos la siguiente relación fundamental:
∆∆ ⋅ = ∆
∆
⋅ =
θ
ω
t r st
r vm m (1.6)
En la ecuación (1.6), ω θm t= ∆
∆ es la rapidez angular media y v s
tm = ∆∆ es la rapidez tangencial media. Es decir, la rapidez
tangencial media es directamente proporcional a la rapidez angular media.
Cuando el movimiento del móvil es uniforme, entonces su rapidez angular y su rapidez tangencial permanecen constantes durante todo el proceso de movimiento. En este caso, se trata de un movimiento circular uniforme (M.C.U.).
¿Cuál es el desplazamiento angular del minutero de un reloj analógico cuando se mueve desde los 15 a los 45 minutos?
Figura 1.4. Cambio de posición de un móvil en movimiento circular. La posición inicial del móvil es θi y su posición fi nal es θf, de modo que el desplazamiento angular es ∆θ = θf – θi.
Los conceptos de rapidez angular media y rapidez tangencial media se pueden expresar, en el límite, como medidas instantáneas de la rapidez angular y la rapidez tangencial.
Lo anterior se puede hacer considerando que el intervalo de tiempo que transcurre entre dos posiciones sucesivas es muy cercano a cero. Esta condición se expresa a través del concepto de límite, de la siguiente forma:
ω θ= ∆∆∆ →
limt t0
(1.7)
v stt
= ∆∆∆ →
lim0
(1.8)
Las ecuaciones (1.7) y (1.8) defi nen la rapidez angular instantánea y la rapidez tangencial instantánea, respectivamente. Con esta defi nición, la ecuación (1.6) se puede expresar como:
ω ⋅ =r v (1.9)
r
Δθ
θi
θf
Δs
ω es la letra griega “omega”.
FISICA_2010_OK.indd 16 21/7/10 17:03:08
17
Capítulo 1: Movimiento Circular
Ejemplo 1
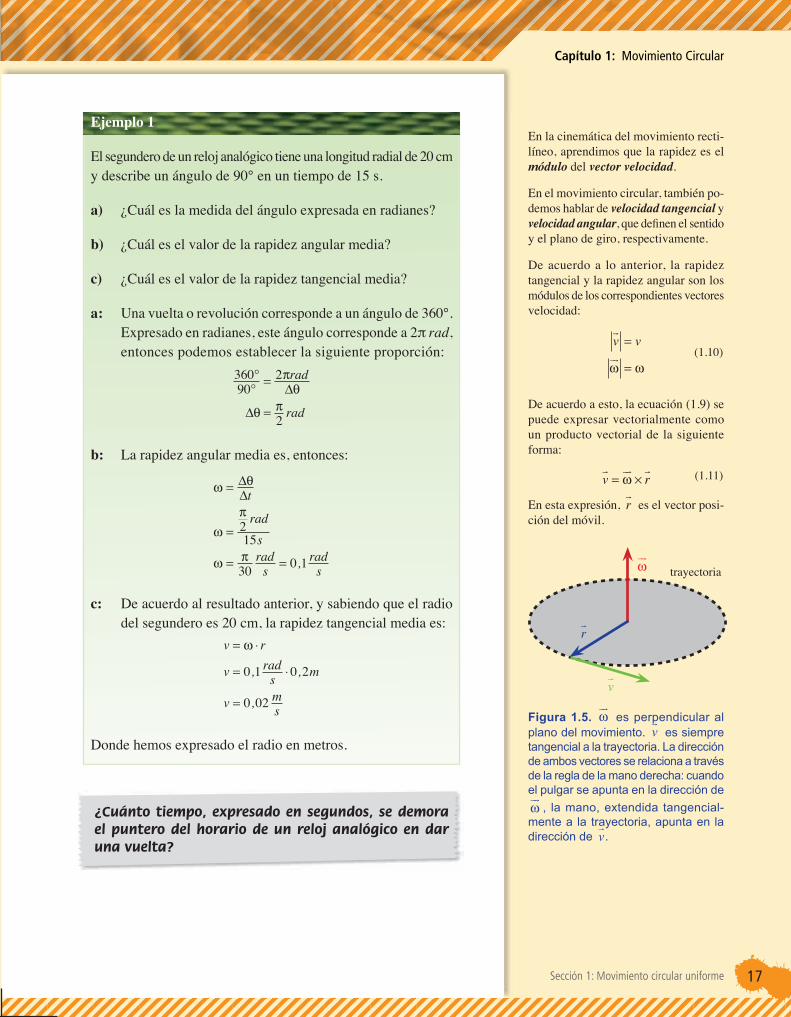
El segundero de un reloj analógico tiene una longitud radial de 20 cmy describe un ángulo de 90° en un tiempo de 15 s.
a) ¿Cuál es la medida del ángulo expresada en radianes?
b) ¿Cuál es el valor de la rapidez angular media?
c) ¿Cuál es el valor de la rapidez tangencial media?
a: Una vuelta o revolución corresponde a un ángulo de 360°. Expresado en radianes, este ángulo corresponde a 2π rad, entonces podemos establecer la siguiente proporción:
36090
2
2
°° = ∆
∆ =
πθ
θ π
rad
rad
b: La rapidez angular media es, entonces:
ω θ
ωπ
ω π
= ∆∆
=
= =
t
radsrads
rads
215
30 0 1,
c: De acuerdo al resultado anterior, y sabiendo que el radio del segundero es 20 cm, la rapidez tangencial media es:
v r
v rads m
v ms
= ⋅
= ⋅
=
ω
0 1 0 2
0 02
, ,
,
Donde hemos expresado el radio en metros.
¿Cuánto tiempo, expresado en segundos, se demora el puntero del horario de un reloj analógico en dar una vuelta?
En la cinemática del movimiento recti-líneo, aprendimos que la rapidez es el módulo del vector velocidad.
En el movimiento circular, también po-demos hablar de velocidad tangencial y velocidad angular, que defi nen el sentido y el plano de giro, respectivamente.
De acuerdo a lo anterior, la rapidez tangencial y la rapidez angular son los módulos de los correspondientes vectores velocidad:
v v
=
=ω ω (1.10)
De acuerdo a esto, la ecuación (1.9) se puede expresar vectorialmente como un producto vectorial de la siguiente forma:
v r
= ×ω (1.11)
En esta expresión, r
es el vector posi-ción del móvil.
Figura 1.5. ω
es perpendicular al plano del movimiento. v
es siempre
tangencial a la trayectoria. La dirección de ambos vectores se relaciona a través de la regla de la mano derecha: cuando el pulgar se apunta en la dirección de
ω
, la mano, extendida tangencial-mente a la trayectoria, apunta en la dirección de v
.
r
ω
v
trayectoria
Sección 1: Movimiento circular uniforme
FISICA_2010_OK.indd 17 21/7/10 17:03:24